Область изобретения
Настоящее изобретение, в целом, относится к способам и системам для управления перепускной заслонкой с регулятором перепускной заслонки с обратной связью, причем может осуществляться обновление параметров регулятора перепускной заслонки с обратной связью во время работы двигателя посредством введения колебаний давления наддува.
Уровень техники
Объем двигателей внутреннего сгорания могут быть уменьшен для повышения топливной экономичности. Для достижения высокой пиковой мощности двигателя могут быть применены турбонагнетатели для увеличения давления наддува. В одном из примеров турбонагнетатель может содержать компрессор и турбину, соединенные приводным валом, причем турбина установлена в двигателе со стороны выпускного коллектора, и компрессор установлен в двигателе со стороны впускного коллектора. Для управления потоком воздуха во впускной коллектор двигателя между компрессором и впускным коллектором может быть расположен дроссель. Управление давлением наддува может осуществляться посредством регулирования количества достигающих турбины отработавших газов, например, посредством перепускной заслонки. В ответ на запрашиваемый крутящий момент система управления двигателем может вычислять требуемое давление на впуске дросселя, и передавать его регулятору перепускной заслонки с обратной связью. Для приведения в действие перепускной заслонки регулятор перепускной заслонки с обратной связью может вырабатывать сигнал управления перепускной заслонкой. В качестве примера, регулятор перепускной заслонки с обратной связью может быть пропорционально-интегрально-дифференциальным, ПИД (PID) регулятором с дополнительным разомкнутым управлением. Коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих ПИД (PID) регулятора должны быть настроены для системы двигателя. Однако, определение коэффициентов усиления ПИД (PID) регулятора может быть непростой задачей, так как коэффициенты усиления регулятора зависят от условий работы, таких как поток воздуха в двигатель, скорость вращения турбины и барометрическое давление.
Другие попытки определения коэффициентов усиления ПИД (PID) регулятора содержат настройку регулятора с использованием релейной обратной связи. Один из примеров такого подхода раскрыт в патенте США №8255066 В2 Бойко (Boiko) с соавт. В этом патенте создают колебания, соответствующие определенному запасу устойчивости по амплитуде и фазе, и на основе амплитуды и частоты колебаний вычисляют параметры настройки ПИД (PID) регулятора. Кроме того, способ существующего уровня техники является «непараметрическим», так как не осуществляются попытки оценки параметров модели объекта (процесса).
Однако, авторы настоящего изобретения выявили описанные выше, а также потенциальные недостатки таких систем. В качестве примера, упомянутый способ определения параметров настройки ПИД (PID) сложен, может занимать много времени, и не предлагает четкого подхода по нахождению баланса между скоростью отклика и устойчивостью. Кроме того, может требоваться обновление параметров регулятора путем длительной калибровки транспортного средства для учета последних изменений в аппаратной части или изменчивости от компонента к компоненту, или после изначальной заводской калибровки из-за деградации системы с течением времени.
Раскрытие изобретения
В одном из примеров, описанные выше недостатки могут быть устранены посредством способа для системы двигателя, содержащего: при стабильной работе двигателя, возбуждение колебаний давления наддува посредством приведения в действие перепускной заслонки, и компенсирование изменений давления воздуха в коллекторе соответствующими колебаниями дросселя; и обновление коэффициента усиления контроллера перепускной заслонки с обратной связью на основе колебаний давления наддува. Например, коэффициенты могут быть обновлены во время работы двигателя на основе параметров, описывающих измеренные колебания давления наддува, таких как амплитуда, частота и так далее. Таким образом, может осуществляться обновление коэффициента усиления регулятора перепускной заслонки с обратной связью в реальном времени во время работы двигателя.
Например, управление перепускной заслонкой может осуществляться посредством регулятора перепускной заслонки с обратной связью, представляющего собой ПИД (PID) регулятор. Во время стабильной работы двигателя колебания давления наддува малой амплитуды могут быть возбуждены посредством колебаний положения перепускной заслонки. Давлением наддува может быть давление на впуске дросселя или давление на выпуске компрессора. Для дизельного двигателя давлением наддува может быть давление во впускном коллекторе. В качестве неограничивающего примера в настоящей заявке давление наддува упоминается как давление на впуске дросселя ДВД (TIP). В ответ на колебания ДВД (TIP) для поддержания постоянного давления воздуха в коллекторе могут осуществляться колебания дросселя. В другом варианте осуществления, в случае гибридного двигателя, для снижения воздействия колебаний давления на впуске дросселя на выходной крутящий момент могут быть использованы электромотор или генератор. Обновление коэффициентов усиления ПИД (PID) регулятора может осуществляться в функции от частоты, амплитуды и фазы колебаний давления наддува. Посредством обновления коэффициента усиления регулятора перепускной заслонки с обратной связью с течением времени может быть обеспечено устойчивое управление давлением наддува, нечувствительное к деградации компонентов транспортного средства. Посредством определения коэффициента усиления регулятора перепускной заслонки с обратной связью во время стабильной работы двигателя, обновление коэффициента усиления регулятора перепускной заслонки с обратной связью может осуществляться с незначительным влиянием на работу двигателя.
Следует понимать, что вышеприведенное краткое раскрытие служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
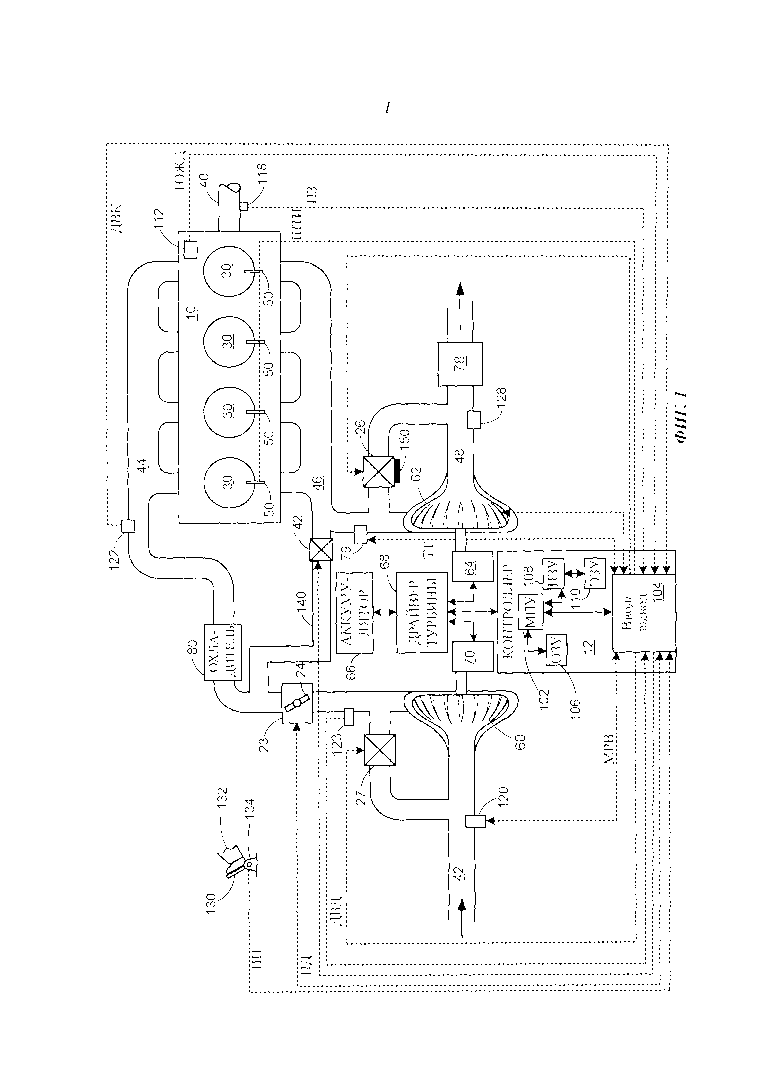
На фиг. 1 представлена блок-схема примера двигателя с турбонагнетателем, содержащего перепускную заслонку.
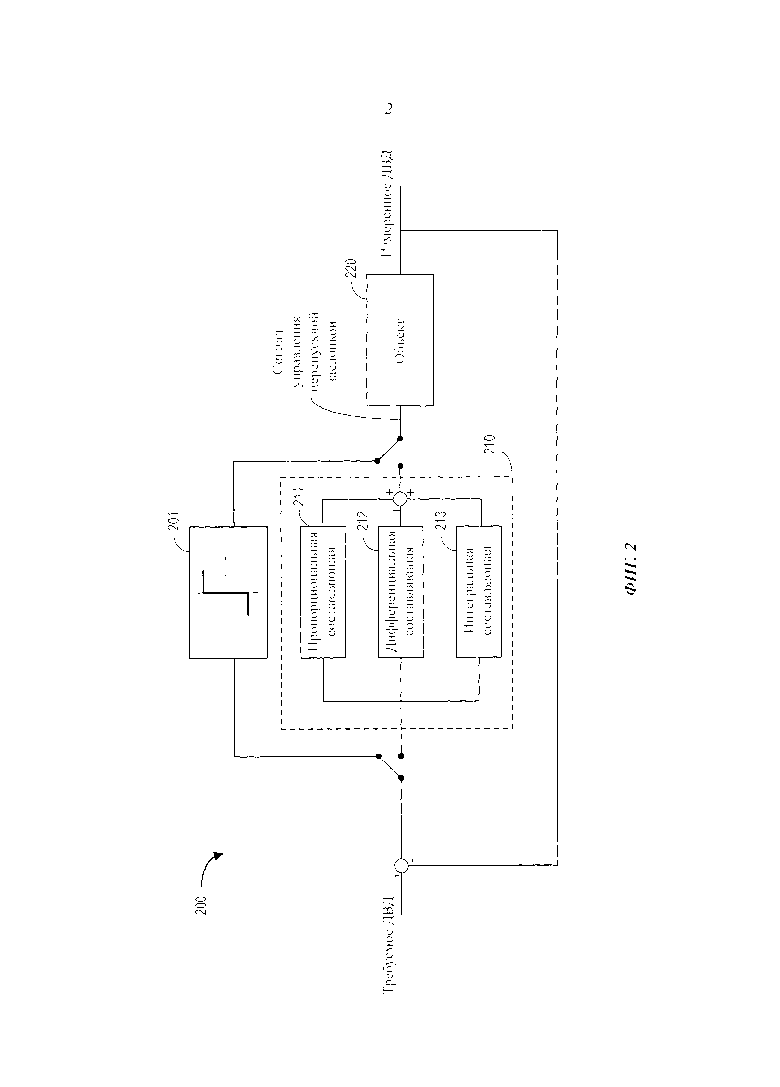
На фиг. 2 представлена блок-схема примера регулятора перепускной заслонки с обратной связью.
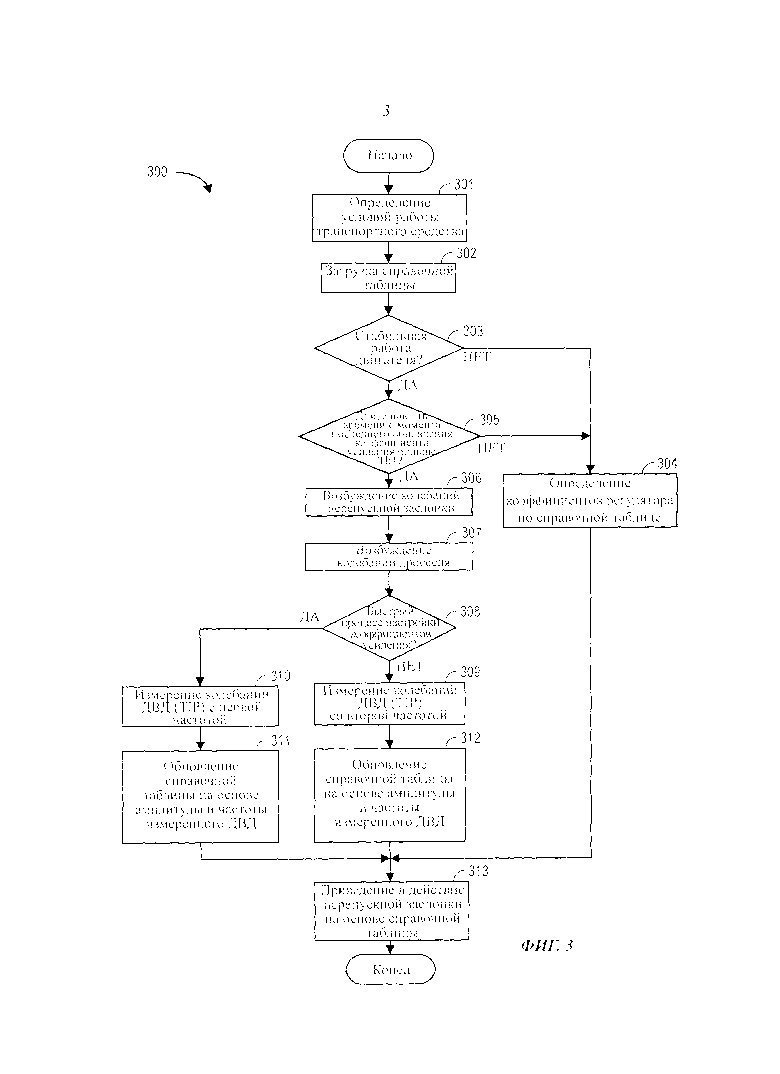
На фиг. 3 показан пример способа обновления параметров регулятора перепускной заслонки с обратной связью.
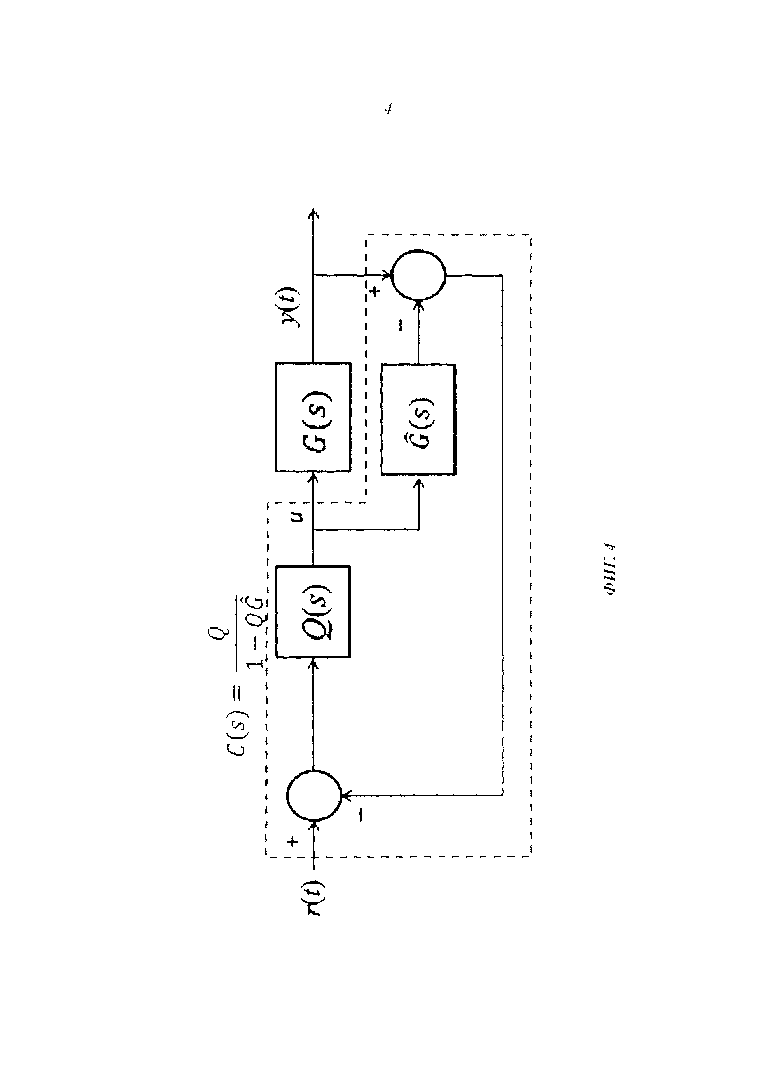
На фиг. 4 показан пример структуры системы управления с внутренней моделью.
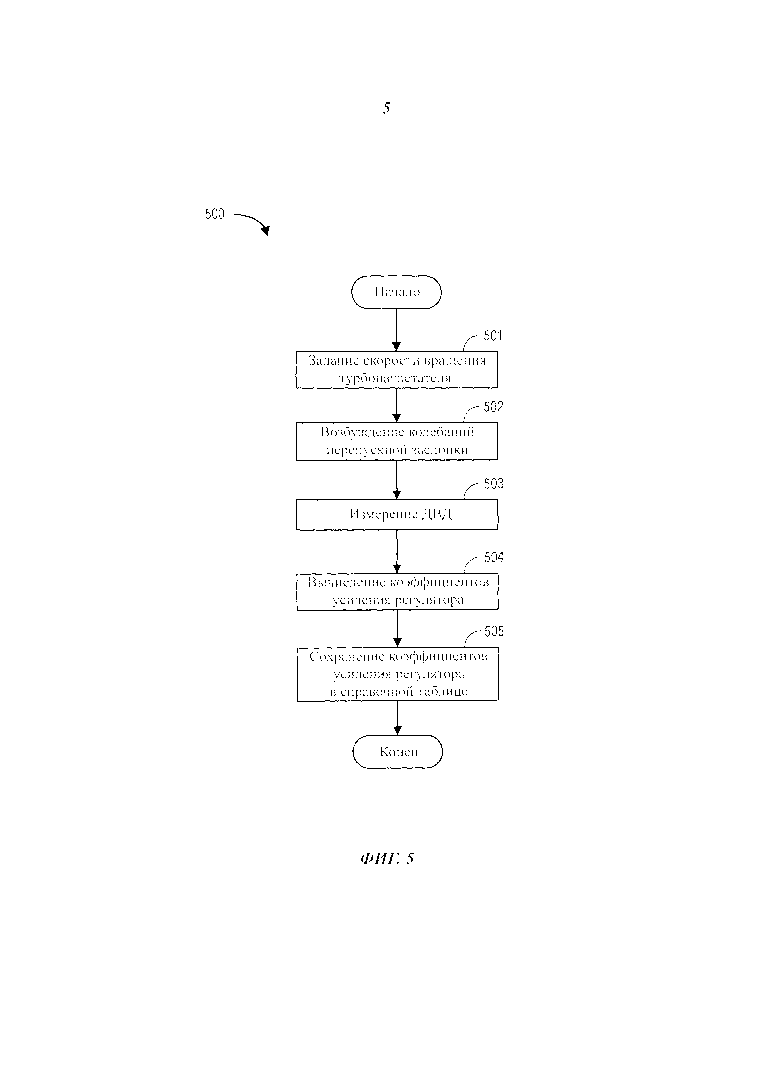
На фиг. 5 показан пример способа калибровки регулятора перепускной заслонки с обратной связью.
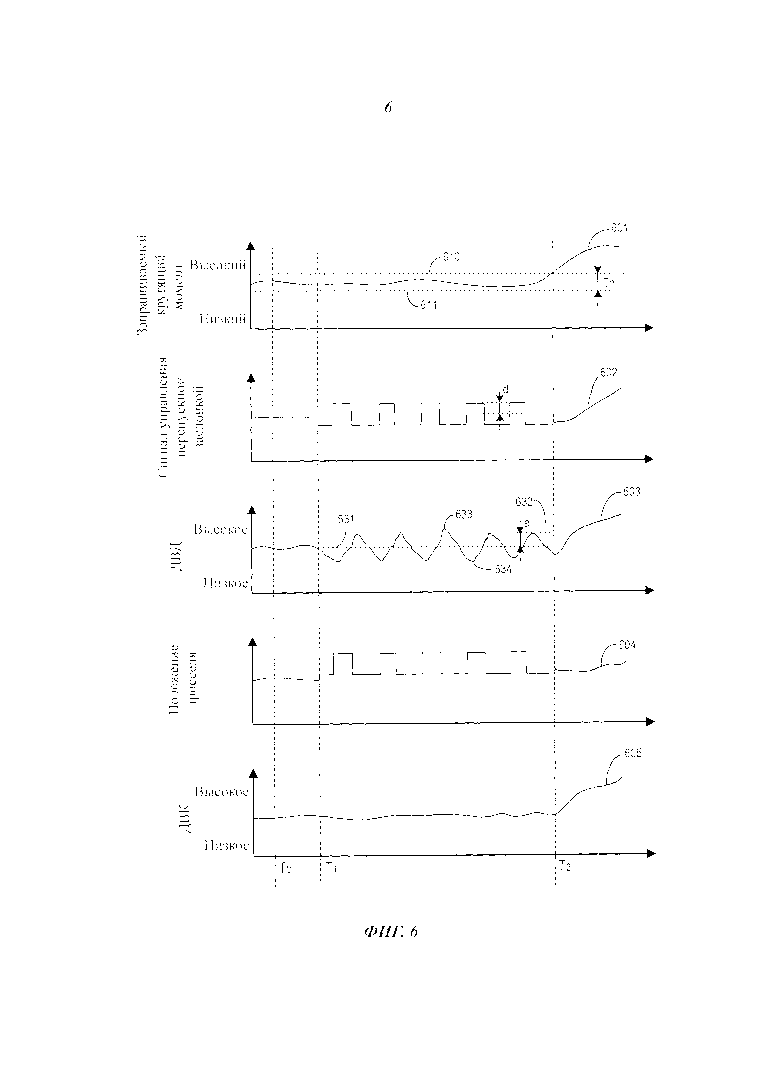
На фиг. 6 показаны графики, иллюстрирующие различные параметры двигателя при реализации упомянутого примера способа.
Осуществление изобретения
Настоящее изобретение относится к системам и способам для управления перепускной заслонкой двигателя с турбонагнетателем, такого как двигатель с турбонагнетателем, показанный на фиг. 1. Управление положением перепускной заслонки может осуществляться посредством регулятора перепускной заслонки с обратной связью. На фиг. 2 представлена блок-схема примера регулятора перепускной заслонки с обратной связью. Упомянутый регулятор перепускной заслонки с обратной связью может содержать ПИД (PID) регулятор, коэффициент усиления которого подбирают с использованием релейной обратной связи. Поскольку требуемый коэффициент регулятора может варьироваться в различных транспортных средствах из-за изменчивости от компонента к компоненту, и может отклоняться с течением времени из-за деградации системы, может требоваться обновление коэффициента усиления регулятора после изначальной заводской калибровки. На фиг. 3 показан пример способа обновления коэффициента усиления регулятора с использованием релейной обратной связи. Более конкретно, могут быть возбуждены колебания давления наддува во время работы двигателя приведением в действие перепускной заслонки посредством сигнала управления перепускной заслонкой прямоугольной формы. Коэффициент усиления регулятора перепускной заслонки с обратной связью может быть получен на основе измеренных частоты, амплитуды и/или фазы колебаний давления наддува с использованием системы управления с внутренней моделью СУВМ (IMC). На фиг. 4 показан пример структурной схемы СУВМ (IMC). На фиг. 5 показан пример способа заводской калибровки коэффициента усиления регулятора перепускной заслонки с обратной связью. На фиг. 6 показано изменение параметров двигателя при обновлении коэффициента усиления регулятора перепускной заслонки с обратной связью во время работы двигателя.
На фиг. 1 представлена блок-схема примера двигателя 10, который может входить в состав силовой установки автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако, в соответствии с настоящим изобретением может быть использовано другое количество цилиндров. Управление двигателем 10 может осуществляться, по меньшей мере, частично, системой управления, содержащей контроллер 12, и посредством входных сигналов от оператора транспортного средства 132 через устройство 130 ввода. В этом примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали ПП (РР). Каждая камера 30 сгорания (например, цилиндр) двигателя 10 может содержать стенки камеры сгорания с расположенным внутри поршнем. Упомянутые поршни могут быть соединены с коленчатым валом 40 таким образом, что возвратно-поступательное движение поршня преобразуется во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен, по меньшей мере, с одним ведущим колесом транспортного средства через промежуточную систему трансмиссии (не показана). Кроме того, с коленчатым валом 40 посредством маховика может быть соединен стартер для обеспечения возможности запуска двигателя 10.
Камеры 30 сгорания могут получать впускной воздух из впускного коллектора 44 через впускной канал 42, и могут осуществлять выпуск продуктов сгорания через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут выборочно сообщаться с камерой 30 сгорания посредством, соответственно, впускных клапанов и выпускных клапанов (не показаны). В некоторых вариантах осуществления камера 30 сгорания может содержать два или большее количество впускных клапанов и/или два или большее количество выпускных клапанов.
Топливные инжекторы 50 показаны непосредственно соединенными с камерой 30 сгорания для впрыска непосредственно в нее топлива в количестве, пропорциональном ширине топливного импульса ШТИ (FPW), получаемого от контроллера 12. Таким образом, топливный инжектор 50 осуществляет так называемый непосредственный впрыск топлива в камеру 30 сгорания. Топливный инжектор может быть установлен, например, в стенке камеры сгорания, или в верхней части камеры сгорания. Подачу топлива к топливному инжектору 50 может осуществлять топливная система (не показана), содержащая топливный бак, топливный насос и топливную рампу. В некоторых вариантах осуществления камеры 30 сгорания могут дополнительно, или в качестве альтернативы, содержать топливный инжектор, расположенный во впускном коллекторе 44, в такой конфигурации, которая обеспечивает так называемый распределенный впрыск топлива во впускной порт выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может содержать дроссель 23, содержащий, соответственно, дроссельную заслонку 24. В данном конкретном примере контроллер 12 может изменять положение дроссельной заслонки 24 посредством сигналов, подаваемых на исполнительный механизм, входящий в состав дросселя 23. В одном из примеров, исполнительные механизмы могут быть электрическими исполнительными механизмами (например, электрическими моторами), в конфигурации, которая известна как электронное управление дросселем (ЭУД). Таким образом, дроссель 23 может использоваться для обеспечения изменения количества впускного воздуха, подаваемого в камеру 30 сгорания, а также другие цилиндры двигателя. Положение дроссельной заслонки 24 может подаваться на контроллер 12 посредством сигнала ПД (TP) положения дросселя. Впускной канал 42 может дополнительно содержать датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик 123 давления на впуске дросселя для выработки соответствующих сигналов МРВ (MAF) (массового расхода воздуха) и ДВК (давления воздуха в коллекторе) контроллеру 12 двигателя.
Выпускной канал 48 может принимать из цилиндров 30 отработавшие газы. Датчик 128 отработавших газов показан соединенным с выпускным каналом 48 после турбины 62 и выше по потоку от устройства 78 снижения выбросов. Датчик 128 может быть выбран из различных подходящих датчиков для определения воздушно-топливного отношения в отработавших газах, таких как, например, линейный широкополосный датчик кислорода или УДКОГ (UEGO) (универсальный или широкополосный датчик кислорода в отработавших газах), датчик кислорода с двумя устойчивыми состояниями ДКОГ (EGO), датчик NOx, углеводородов или СО. Упомянутым устройством 78 снижения выбросов может быть трехкомпонентный каталитический нейтрализатор ТКН (TWC), ловушка NOx, различные другие устройства снижения выбросов, или их сочетания.
Измерение температуры отработавших газов может осуществляться посредством одного или нескольких датчиков температуры (не показаны), расположенных в выпускном канале 48. В качестве альтернативы, температура отработавших газов может быть рассчитана на основе условий работы двигателя, таких как скорость вращения, нагрузка, воздушно-топливное отношение ВТО (AFR), запаздывание момента зажигания, и так далее.
Контроллер 12 двигателя показан на фиг. 1 в качестве микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронное запоминающее устройство для исполняемых программ и калибровочных значений, показанное в данном конкретном примере в виде микросхемы 106 постоянного запоминающего устройства, запоминающее устройство 108 с произвольным доступом, энергонезависимое запоминающее устройство 110, и шину данных. Контроллер 12 двигателя может получать различные сигналы от датчиков, соединенных с двигателем 10, в том числе, в дополнение к вышеописанным сигналам, измеренный массовый расход всасываемого воздуха МРВ (MAF) от датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя ТОЖД (ЕСТ) от датчика 112 температуры, схематично показанного расположенным в одной из частей двигателя 10; давление на впуске дросселя ДВД (TIP) от датчика 123; сигнал профиля зажигания ПЗ (PIP) от датчика 118 Холла (или датчика другого типа), соединенного с коленчатым валом 40; сигнал положения дросселя ПД (TP) от датчика положения дросселя, как описано выше; и сигнал абсолютного давления воздуха в коллекторе ДВК (MAP) от датчика 122, как описано выше. Сигнал скорости вращения двигателя, Об/мин (RPM), может быть выработан контроллером 12 из сигнала ПЗ (PIP). Сигнал ДВК (MAP) давления воздуха в коллекторе от датчика давления воздуха в коллекторе может использоваться для обеспечения индикации вакуума, или давления, во впускном коллекторе 44. Следует отметить, что могут быть использованы различные сочетания вышеуказанных датчиков, например, использование датчика МРВ (MAF) без датчика ДВК (MAP), или наоборот. При работе в условиях стехиометрии датчик ДВК (MAP) может обеспечивать индикацию крутящего момента двигателя. Кроме того, этот датчик, наряду с определяемой скоростью вращения двигателя, может обеспечивать оценку количества засасываемой в цилиндр смеси (включая воздух). В одном из примеров датчик 118, который также используется в качестве датчика скорости вращения двигателя, может вырабатывать за каждый оборот коленчатого вала 40 заранее определенное количество импульсов с равным интервалом. В некоторых примерах, в постоянном запоминающем устройстве 106 могут быть записаны машиночитаемые данные, представляющие собой инструкции, исполняемые процессором 102 для реализации способов, описанных ниже, а также других вариантов, которые предполагаются, но не приведены отдельно.
Двигатель 10 может дополнительно содержать устройство наддува, такое как турбонагнетатель, содержащий, по меньшей мере, компрессор 60, расположенный во впускном коллекторе 44. Компрессор 60 может приводиться в действие турбиной 62, например, посредством вала или другого соединительного механизма. Турбина 62 может быть расположена в выпускном канале 48 с возможностью сообщения с проходящими через него отработавшими газами. Во впускном коллекторе 44 может быть расположен датчик 123 для измерения давления на впуске дросселя и обеспечения передачи сигнала ДВД (TIP) контроллеру 12 двигателя.
Выпускной канал 48 может содержать перепускную заслонку 26, соединенную с турбиной 62 для отведения отработавших газов от турбины 62. В некоторых вариантах осуществления перепускная заслонка 26 может быть многоступенчатой перепускной заслонкой, такой как двухступенчатая перепускная заслонка, в которой первая ступень выполнена с возможностью управления давлением наддува, и вторая ступень обеспечивает повышение теплового потока в устройство 78 снижения выбросов. Управление перепускной заслонкой 26 может осуществляться посредством исполнительного механизма 150, который может быть электрическим исполнительным механизмом, таким как, например, электромотор, хотя также возможно использование пневматических исполнительных механизмов. Впускной канал 42 может содержать перепускной клапан 27 компрессора, выполненный с возможностью отведения впускного воздуха в обход компрессора 60. Управление перепускной заслонкой 26 и/или перепускным клапаном 27 компрессора может осуществляться контроллером 12 двигателя посредством исполнительных механизмов (например, исполнительного механизма 150), например, для открытия, когда требуется более низкое давление наддува.
Впускной канал 42 может дополнительно содержать охладитель 80 нагнетаемого воздуха ОНВ (САС) (например, промежуточный охладитель) для снижения температуры впускных газов, нагнетаемых турбонагнетателем или нагнетателем. В некоторых вариантах осуществления, охладитель 80 нагнетаемого воздуха может быть теплообменником типа «воздух-воздух». В некоторых вариантах осуществления, охладитель 80 нагнетаемого воздуха может быть теплообменником типа «воздух-жидкость».
Кроме того, в раскрытом варианте осуществления система рециркуляции отработавших газов РОГ (EGR) может перенаправлять отработавшие газы в необходимой пропорции в область между дросселем 23 и ОНВ (САС) 80 через канал 140 РОГ (EGR). Контроллер 12 может осуществлять изменение количества РОГ (EGR), подаваемых во впускной канал 42, посредством клапана 144 РОГ (EGR). Кроме того, внутри канала РОГ (EGR) может быть предусмотрен датчик РОГ (EGR) (не показан), который может обеспечивать индикацию одного или нескольких показателей отработавших газов, а именно давления, температуры и концентрации. На фиг. 1 показана система РОГ (EGR) высокого давления, в которой РОГ (EGR) направляют из области выше по потоку от турбины турбонагнетателя в область ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления двигатель может, дополнительно, или в качестве альтернативы, содержать систему РОГ (EGR) низкого давления, в которой РОГ (EGR) направляют из области ниже по потоку от турбины турбонагнетателя в область выше по потоку от компрессора турбонагнетателя.
Контроллер 12 двигателя получает сигналы от различных показанных на фиг. 1 датчиков, и задействует различные показанные на фиг. 1 исполнительные механизмы, для регулирования работы двигателя на основе получаемых сигналов и инструкций, сохраненных в памяти контроллера. В качестве примера, регулирование давления воздуха в коллекторе может содержать управление исполнительным механизмом дросселя для регулирования проходного сечения дросселя. В качестве другого примера, регулирование давления воздуха на впуске дросселя может содержать управление исполнительным механизмом перепускной заслонки для регулирования положения перепускной заслонки.
Обратимся к фиг. 2, на которой представлен пример блок-схемы регулятора 200 перепускной заслонки с обратной связью. Регулятор 200 перепускной заслонки с обратной связью может являться частью контроллера 12 двигателя. Другими словами, механизм управления перепускной заслонкой с обратной связью может быть реализован в контроллере 12 двигателя. Регулятор 200 перепускной заслонки с обратной связью получает на входе требуемое и измеренное ДВД (TIP), и выдает сигнал управления перепускной заслонкой на выходе. ДВД (TIP) может быть измерено датчиком, установленным между компрессором и дросселем (таким как датчик 123 давления на фиг. 1). Упомянутый регулятор перепускной заслонки с обратной связью может содержать ПИД (PID) регулятор 210. ПИД (PID) регулятор 210 принимает в качестве входного сигнала сигнал ошибки ДВД (TIP) (например, разность между требуемым ДВД (TIP) и измеренным ДВД (TIP)), и выдает сигнал управления перепускной заслонкой объекту 220. Объект 220 в настоящей заявке представляет собой процесс двигателя с сигналом управления перепускной заслонкой на входе и давлением на впуске дросселя на выходе. В объекте 220 для регулирования положения перепускной заслонки сигнал управления перепускной заслонкой может быть подан исполнительному механизму (например, исполнительному механизму 150 на фиг. 1). Изменение положения перепускной заслонки приводит к колебаниям ДВД (TIP). ДВД (TIP) может быть измерено и подано в качестве обратной связи на вход для сравнения с требуемым ДВД (TIP).
ПИД (PID) регулятор 210 содержит три составляющие: пропорциональную 211, дифференциальную 212 и интегральную 213. Каждая из упомянутых трех составляющих имеет соответствующий коэффициент усиления. Эти коэффициенты усиления зависят от параметров работы, таких как поток воздуха в двигателе, скорость вращения турбонагнетателя и давление окружающей среды. Для определения (то есть, настройки) коэффициента усиления регулятора, в качестве альтернативы, объект 220 может быть соединен со ступенчатой функцией 201. Ступенчатая функция 201 может принимать сигнал ошибки по ДВД (TIP) на вход и выдавать сигнал управления перепускной заслонкой в виде периодического сигнала прямоугольной формы. Такой сигнал управления перепускной заслонкой может приводить к колебаниям положения перепускной заслонки. Таким образом, ДВД (TIP) на выходе объекта 220 может колебаться. Колебания ДВД (TIP) могут быть использованы для определения динамических характеристик объекта 220. Пример способа для определения коэффициентов усиления регулятора 210 более подробно описан на фиг. 3 и фиг. 5.
Из-за деградации системы с течением времени требуемый коэффициент усиления регулятора могут изменяться. На фиг. 3 показан пример способа 300 обновления коэффициента усиления регулятора во время работы двигателя. Например, во время стабильной работы двигателя исполнительный механизм перепускной заслонки может получать сигнал от ступенчатой функции (например, ступенчатой функции 201 на фиг. 2), а не от ПИД (PID) регулятора (например, ПИД (PID) регулятора 210 на фиг. 2). Кроме того, способ 300 может содержать определение обновленного коэффициента усиления ПИД (PID) регулятора посредством анализа измеренного сигнала ДВД (TIP).
Инструкции для осуществления способа 300 и остальных способов, раскрытых в настоящей заявке, могут быть выполнены посредством контроллера двигателя на основе инструкций, сохраненных в запоминающем устройстве контроллера двигателя, и в соответствии с сигналами, получаемыми от датчиков системы двигателя, таких как датчики, описанные выше со ссылкой на фиг. 1. Упомянутый контроллер двигателя может приводить в действие исполнительные механизмы двигателя системы двигателя для регулирования работы двигателя в соответствии со способами, описанными ниже.
На этапе 301 осуществляется определение условий работы транспортного средства контроллером двигателя (таким как контроллер 12 двигателя на фиг. 2). Упомянутый контроллер двигателя получает измерения от различных датчиков системы двигателя и оценивает условия работы, содержащие нагрузку двигателя, скорость вращения двигателя, ДВД (TIP), ДВК (MAP), запрашиваемый крутящий момент транспортного средства, скорость вращения турбонагнетателя, положение перепускной заслонки и положение дросселя.
На этапе 302 способа 300 осуществляется загрузка справочной таблицы для определения коэффициента усиления регулятора перепускной заслонки с обратной связью (такого, как регулятор 210 на фиг. 1). Например, упомянутая справочная таблица может быть задана заранее и сохранена в долговременной памяти контроллера двигателя (такого, как контроллер 12 на фиг. 1). В качестве другого примера, упомянутая справочная таблица может быть откалибрована на заводе для каждого транспортного средства. Пример способа заводской калибровки справочной таблицы показан на фиг. 5. В одном из вариантов осуществления, упомянутая справочная таблица содержит данные о скорости вращения турбонагнетателя и соответствующем коэффициенте усиления регулятора перепускной заслонки с обратной связью. В качестве примера, на основе оцененной на этапе 301 скорости вращения турбонагнетателя способ 300 определяет коэффициенты усиления для каждой из составляющих ПИД (PID) регулятора. В качестве другого примера, пропорциональный, интегральный и дифференциальный коэффициенты усиления ПИД (PID) регулятора могут снижаться с увеличением скорости вращения турбонагнетателя. В другом примере коэффициенты усиления регулятора перепускной заслонки с обратной связью могут быть получены посредством интерполяции скорости вращения турбонагнетателя, сохраненной в справочной таблице.
На этапе 303 способ 300 осуществляет определение того, находится ли двигатель в режиме стабильной работы. Например, двигатель может находиться в режиме стабильной работы, если изменение запрашиваемого крутящего момента находится в пределах порогового значения в течение заданного периода времени. В традиционных силовых установках изменение крутящего момента невелико при относительно постоянном запросе водителя, например, во время стабильной езды с небольшими изменениями скорости. В умеренных, последовательных или параллельных гибридах, двигатель часто работает при стабильном запрашиваемом крутящем моменте, как правило, соответствующем высокой эффективности работы, в течение длительных периодов времени, независимо от запроса водителя. Другой пример стабильной работы двигателя заключается в том, что скорость изменения оцененного или измеренного воздушного потока двигателя находится в пределах заранее определенных границ, что может быть установлено посредством применения к сигналу воздушного потока двигателя фильтра высоких частот и сравнения отфильтрованного выходного сигнала с пороговыми значениями. Если двигатель не находится в режиме стабильной работы, способ может переходить к этапу 304, на котором управление перепускной заслонкой осуществляется регулятором перепускной заслонки с обратной связью, с коэффициентами усиления регулятора, определенными на основе справочных таблиц, загруженных на этапе 302. В противном случае, если двигатель находится в режиме стабильной работы, способ 300 переходит на этап 305.
На этапе 305 способа 300 может осуществляться сравнение длительности времени с момента предыдущего обновления коэффициента усиления регулятора перепускной заслонки с обратной связью с заранее определенной длительностью времени Th1. Длительность времени Th1 может зависеть от состояния системы двигателя. Например, Th1 может быть предполагаемой длительностью времени, после которой может произойти деградация перепускной заслонки. Если обновление справочной таблицы не осуществлялось в течение времени, более длительного, чем Th1, способ 300 переходит на этап 306. В противном случае, способ 300 переходит к этапу 304, где для управления перепускной заслонкой используются коэффициенты усиления, сохраненные в загруженной справочной таблице. В одном из вариантов осуществления может быть один таймер и одна предопределенная длительность времени Тh1. В другом варианте осуществления, время, в течение которого набор данных справочной таблицы не обновлялся, может являться вектором значений времени, каждое из которых соответствует набору условий работы двигателя. Таким образом, упомянутый регулятор может не обновлять первый набор данных справочной таблицы, так как его таймер не превышает предопределенную длительность Тh1, но может обновлять второй набор данных справочной таблицы, когда есть соответствие этим условиям, поскольку таймер второго набора данных превышает Th1 из-за того, что не был обновлен также недавно, как таймер первого набора данных. За счет обновления справочной таблицы с заранее определенной временной периодичностью, может быть компенсировано изменение требуемых коэффициента усиления регулятора перепускной заслонки с обратной связью для улучшения управления давлением наддува.
На этапе 306 способ 300 содержит возбуждение колебаний положения перепускной заслонки посредством приведения в действие перепускной заслонки с помощью ступенчатой функции (такой как ступенчатая функция 201 на фиг. 2). Упомянутая ступенчатая функция может иметь форму периодического прямоугольного сигнала. Следовательно, положение перепускной заслонки может колебаться, что приводит к колебаниям ДВД (TIP). В одном из примеров, во время приведения в действие перепускной заслонки посредством ступенчатой функции поток РОГ (EGR) может быть остановлен посредством закрытия клапана РОГ (EGR) (такого как клапан 142 РОГ (EGR) на фиг. 2). Кроме того, может быть закрыт перепускной клапан компрессора (такой как клапан 27 CRV на фиг. 2). Таким образом, колебания ДВД (TIP) возбуждают исключительно посредством колебаний положения перепускной заслонки.
На этапе 307 способ 300 содержит приведение в действие дросселя (такого как дроссель 24 на фиг. 1) для возбуждения колебаний положения дросселя. Колебания упомянутого дросселя могут осуществляться для компенсирования изменения ДВК (MAP), которое, в противном случае, возникло бы из-за колебаний ДВД (TIP), так, чтобы могло быть обеспечено относительно постоянное ДВК (MAP). Таким образом, во время процесса настройки коэффициента усиления регулятора может быть оказано меньшее воздействие на дорожные качества транспортного средства. В одном из примеров, проходное сечение дросселя может увеличиваться в ответ на увеличение открытия перепускной заслонки. В одном из вариантов осуществления, упомянутые колебания дросселя могут быть определены на основе сигнала управления перепускной заслонкой. В качестве примера, приведение в действие упомянутого дросселя может осуществляться с той же частотой и фазой, что и у сигнала управления перепускной заслонкой. В другом примере, приведение в действие упомянутого дросселя может осуществляться в ответ на измеренное положение перепускной заслонки. В другом варианте осуществления, упомянутые колебания дросселя могут быть определены на основе ДВД (TIP). Например, контроллер 12 двигателя может определять величину ДВД (TIP) посредством датчика и вычислять соответствующее требуемое положение дросселя для поддержания постоянного ДВК (MAP). В другом варианте осуществления, упомянутые колебания дросселя могут быть определены на основе ДВК (MAP). Например, контроллер 12 двигателя может определять величину ДВК (MAP) посредством датчика и определять соответствующее положение дросселя для компенсации флуктуации ДВК (MAP). В другом варианте осуществления, в областях применения с гибридными силовыми установками, в системе транспортного средства для компенсирования воздействия колебаний ДВД (TIP) на выходной крутящий момент могут быть использованы электромотор или генератор. Например, для поддержания постоянного выходного крутящего момента транспортного средства может осуществляться колебательное изменение вырабатываемого электромотором или генератором крутящего момента.
На этапе 308 способ 300 содержит определение того, следует ли настроить коэффициент усиления посредством быстрого процесса настройки коэффициента усиления на этапах 310 и 311, или посредством более затратного по времени и с точки зрения ресурсов процесса настройки на этапах 309 и 312. В качестве примера, по способу 300 быстрая настройка может быть выбрана в случае, если прогнозируется, что текущие условия работы двигателя могут в скором времени прекратиться. В качестве другого примера, по способу 300 быстрая настройка может быть выбрана, если длительность времени с момента предыдущего обновления коэффициента усиления регулятора перепускной заслонки с обратной связью меньше порогового значения Th2, причем пороговое значение Th2 больше порогового значения Th1 этапа 305.
На этапе 310 осуществляется измерение колебаний ДВД (TIP) с первой частотой дискретизации. Например, ДВД (TIP) может быть измерено датчиком, установленным выше по потоку от дросселя (таким как датчик 123 на фиг. 1). Затем, на этапе 311 может осуществляться обновление коэффициента усиления регулятора перепускной заслонки с обратной связью на основе частоты и амплитуды измеренных колебаний ДВД (TIP). В одном из вариантов осуществления частота колебаний ДВД (TIP) может быть определена на основе точек, в которых колебания ДВД (TIP) принимают нулевые значения, и амплитуда колебаний ДВД (TIP) может быть определена на основе экстремумов измеренного сигнала ДВД (TIP). В другом варианте осуществления, могут быть определены экстремумы 633 и 634 (то есть, локальные максимум и минимум) колебаний ДВД (TIP), как показано на фиг. 6. Нулевое положение 631 может быть определено на основе этих экстремумов. Например, упомянутое нулевое положение может быть определено на основе скользящего среднего значения экстремумов. Частота и фаза колебаний ДВД (TIP) могут быть определены посредством отслеживания точек нулевых значений сигнала ДВД (TIP) в течение некоторого времени. Амплитуда колебаний ДВД (TIP) может определяться разностью между экстремумами и значением ДВД (TIP) в нулевом положении (как, например, амплитуда между точками 632 и 631 на фиг. 6).
С использованием информации, полученной на основе колебаний ДВД (TIP), коэффициент усиления и фаза передаточной функции системы на частоте упомянутых колебаний могут быть вычислены из приведенных ниже уравнений, выведенных из обычного анализа методом описывающих функций теории управления:


где G является передаточной функцией системы от сигнала управления перепускной заслонкой к ДВД (TIP) (например, передаточной функцией объекта 220 на фиг. 2), ω является частотой колебаний, а является амплитудой выходных колебаний, d является входной (релейной) амплитудой (показанной на фиг. 6), и ε является размером гистерезиса. Знак |.| обозначает коэффициент усиления системы, ∠ обозначает фазу системы, j обозначает комплексную переменную, и asin - это функция арксинуса.
В качестве примера, регулятор перепускной заслонки с обратной связью может содержать ПИД (PID) регулятор, такой, как показан на фиг. 2. Упомянутый регулятор перепускной заслонки с обратной связью может быть синтезирован на основе системы управления с внутренней моделью СУВМ (IMC). Затем, для получения коэффициентов усиления ПИД (PID) регулятора может быть найден ПИД (PID) регулятор, соответствующий этому регулятору на основе СУВМ (IMC). На фиг. 4 показан пример структурной схемы СУВМ (IMC), где r(t) - вход, y(t) - выход, G(s) - передаточная функция объекта (такого, как объект 220 на фиг. 2),  модель объекта (то есть, приближенная модель процесса), и Q(s)„ блок регулятора, должны быть определены. Как показано на фиг. 4, посредством перегруппировки блоков закрытая замкнутая система может быть представлена в виде классической структуры с обратной связью с контроллером, описываемой формулой
модель объекта (то есть, приближенная модель процесса), и Q(s)„ блок регулятора, должны быть определены. Как показано на фиг. 4, посредством перегруппировки блоков закрытая замкнутая система может быть представлена в виде классической структуры с обратной связью с контроллером, описываемой формулой 
В процессе разработки СУВМ (IMC) блок Q может быть выбран как функция, обратная модели процесса, то есть,  Однако, модель процесса обычно является правильной передаточной функцией и не имеет обратной функции, соответствующей принципу причинности. Поэтому, для получения передаточной функции, соответствующей принципу причинности, обратную модель дополняют фильтром:
Однако, модель процесса обычно является правильной передаточной функцией и не имеет обратной функции, соответствующей принципу причинности. Поэтому, для получения передаточной функции, соответствующей принципу причинности, обратную модель дополняют фильтром:  где F(s) является фильтром низких частот. Следует отметить, что при таком выборе Q(s), и предполагая идеальную модель процесса
где F(s) является фильтром низких частот. Следует отметить, что при таком выборе Q(s), и предполагая идеальную модель процесса  передаточной функцией замкнутой системы от r(t) к y(t) является F(s); следовательно, полоса пропускания F(s) обуславливает полосу пропускания замкнутой системы, и может быть использована при синтезе как параметр для обеспечения баланса между производительностью и устойчивостью. После завершения синтеза C(s) может быть найден соответствующий ПИД (PID) регулятор, имеющий аналогичные коэффициенты степеней s в результирующей передаточной функции.
передаточной функцией замкнутой системы от r(t) к y(t) является F(s); следовательно, полоса пропускания F(s) обуславливает полосу пропускания замкнутой системы, и может быть использована при синтезе как параметр для обеспечения баланса между производительностью и устойчивостью. После завершения синтеза C(s) может быть найден соответствующий ПИД (PID) регулятор, имеющий аналогичные коэффициенты степеней s в результирующей передаточной функции.
Другими словами, входной сигнал r(t) регулятора на базе СУВМ (IMC) имеет периодическую прямоугольную форму. В этих условиях объект ведет себя на частоте упомянутых колебаний как интегрирующее звено. Кроме того, частота собственных колебаний релейной обратной связи близка к требуемой полосе пропускания замкнутой системы (1-2 Гц). Поэтому вблизи частоты колебаний релейной обратной связи объект может быть смоделирован в виде пропорционально-интегрирующей задержки ПИЗ (GID). Передаточная функция объекта может иметь следующую форму:

где К является коэффициентом усиления моделируемого объекта и Td является задержкой моделируемого объекта. Следует отметить, что реальной динамике объекта по своей природе характерна низкая полоса пропускания, и она не может быть описана моделью ПИЗ (GID) на всех частотах. В данном случае, поскольку модель ПИЗ (GID) определена на частоте, близкой к полосе пропускания замкнутой системы, объект может быть аппроксимирован моделью ПИЗ (GID). Коэффициент усиления и фаза передаточной функции объекта на частоте ω могут быть выражены в виде:


Приравнивая уравнения 1-2 к уравнениям 4-5, которые получены из эксперимента с релейной обратной связью, можно вычислить K и Td:


Так как модель ПИЗ (GID) содержит интегратор, может быть показано, что регулятор на основе СУВМ (IMC) содержит интегральное действие тогда и только тогда, когда F(s) является фильтром, по меньшей мере, второго порядка и удовлетворяет уравнениям:  Для того, чтобы удовлетворять этим условиям, F(s) может принимать следующий вид:
Для того, чтобы удовлетворять этим условиям, F(s) может принимать следующий вид:

где α является параметром полосы пропускания (параметром настройки СУВМ (IMC), и β выбирают как β=2α+Td, чтобы удовлетворить упомянутые выше условия.
Кроме того, поскольку модель ПИЗ (GID) содержит временную задержку, и задержки необратимы, Q(s) выбирают приблизительно обратной модели процесса без временной задержки:

Используя модель ПИЗ (GID) процесса и вышеупомянутую Q(s), и применяя аппроксимацию Паде временной задержки к модели объекта

получают следующий результирующий регулятор на основе СУВМ (IMC):

который содержит интегратор, как и требуется. Посредством сопоставления коэффициентов степеней s в описанном выше ClMC(s) с обычным ПИД (PID) регулятором, могут быть получены коэффициенты усиления ПИД (PID) регулятора:




где Ki, Kp, и Kd являются коэффициентами усиления интегральной, пропорциональной и дифференциальной составляющих ПИД (PID) регулятора.

В процессе вышеупомянутой калибровки коэффициент усиления ПИД (PID) регулятора может быть вычислен на основе коэффициента усиления K модели объекта и временной задержки Td модели объекта в соответствии с Уравнениями 13-15, которые могут быть доопределены на основе частоты и амплитуды колебаний ДВД (TIP), полученных при снятии характеристик посредством релейной обратной связи, на основе Уравнений 6-7. Параметр α является параметром настройки, определяющим баланс между быстродействием и устойчивостью ПИД (PID) регулятора. При меньшем значении а реакция системы может быть более динамичной. Другими словами, при уменьшении а реакция системы может быть быстрой и может характеризоваться перерегулированием и колебаниями; и при увеличении α реакция может быть более медленной. В качестве примера, а может равняться 2 или 3.
Как видно из Уравнений 6-7, коэффициент усиления модели объекта является функцией амплитуды и частоты колебаний ДВД (TIP), но не является функцией колебаний фазы ДВД (TIP). С другой стороны, временная задержка модели объекта является функцией амплитуды, частоты и фазы колебаний ДВД (TIP). Из-за изменчивости от компонента к компоненту и деградации системы с течением времени требуется обновление коэффициента усиления и временной задержки модели объекта с течением времени. Экспериментально установлено, что коэффициент усиления модели объекта является функцией, сильно зависящей от аргумента, скорости вращения турбонагнетателя. Упомянутая временная задержка модели объекта относительно постоянна. По этой причине, коэффициент усиления ПИД (PID) регулятора в справочной таблице представлен в виде функции от скорости вращения турбонагнетателя. Кроме того, обновление коэффициента усиления модели объекта может осуществляться более часто по сравнению с временной задержкой модели объекта. В качестве примера, справочная таблица может быть составлена путем заполнения значениями 1/K в функции скорости вращения турбонагнетателя, и последующего вычисления остальных коэффициентов усиления ПИД (PID) регулятора на основе Уравнений 13-15. Коэффициенты усиления интегральной составляющей, пропорциональной составляющей и дифференциальной составляющей могут увеличиваться в равных пропорциях.
Возвращаясь к фиг. 3, на этапе 311 на основе частоты и амплитуды измеренных колебаний ДВД (TIP) осуществляется только обновление коэффициента К усиления модели объекта. Затем, на основе частоты и амплитуды колебаний ДВД (TIP) может осуществляться обновление коэффициентов усиления ПИД (PID) регулятора. Например, коэффициенты усиления интегральной составляющей, пропорциональной составляющей и дифференциальной составляющей могут быть увеличены при уменьшении частоты колебаний ДВД (TIP) и увеличены при уменьшении амплитуды колебаний ДВД (TIP). Коэффициенты усиления интегральной составляющей, пропорциональной составляющей и дифференциальной составляющей могут увеличиваться в равных пропорциях. В качестве другого примера, коэффициенты усиления ПИД (PID) регулятора могут быть вычислены на основе частоты и амплитуды колебаний ДВД (TIP), в соответствии с Уравнением 6 и Уравнениями 13-15.
Если на этапе 308 определено, что необходимо провести длительную настройку коэффициента усиления регулятора перепускной заслонки с обратной связью, способ переходит к этапу 309, на котором осуществляется измерение колебаний ДВД (TIP) со второй частотой дискретизации. Вторая частота дискретизации может быть выше первой частоты дискретизации этапа 310. За счет измерения с более высокой частотой дискретизации может быть более точно установлена фаза колебаний ДВД (TIP). Частота, амплитуда и фаза колебаний ДВД (TIP) могут быть использованы для обновления на основе Уравнений 6-7 как коэффициента K усиления модели объекта, так и временной задержки Td модели объекта. Затем, каждый коэффициент усиления ПИД (PID) регулятора обновляют в соответствии с Уравнениями 13-15. Таким образом, способ 300 может реже осуществлять измерение сигнала ДВД (TIP) с высокой частотой дискретизации, только когда требуется обновление временной задержки модели объекта, чтобы сохранить ресурсы контроллера для выполнения других задач. На этапе 312 осуществляется обновление временной задержки Td модели объекта на основе частоты, амплитуды и фазы колебаний ДВД (TIP), и соответствующее обновление коэффициентов усиления ПИД (PID) регулятора.
На этапе 313 осуществляется приведение в действие перепускной заслонки на основе обновленной справочной таблицы.
На фиг. 5 показан пример способа 500 заводской калибровки справочной таблицы. В упомянутой справочной таблице сохранены откалиброванные коэффициенты усиления регулятора перепускной заслонки с обратной связью для каждого значения скорости вращения турбонагнетателя из заранее определенного списка скоростей вращения турбонагнетателя. Аналогично этапу 311 на фиг. 3, коэффициенты усиления регулятора для каждого значения скорости вращения турбонагнетателя могут быть определены посредством релейной обратной связи.
На этапе 501 турбонагнетатель переводят в режим работы с заранее определенной скоростью вращения турбонагнетателя. Затем, на этапе 502 начинают колебания положения перепускной заслонки. В ответ на колебания положения перепускной заслонки может колебаться ДВД (TIP).
На этапе 503 осуществляется измерение ДВД (TIP). В качестве примера, измерение ДВД (TIP) может осуществляться с частотой дискретизации, выше или равной второй частоте дискретизации на этапе 309 фиг. 3. Затем, на этапе 504 могут быть вычислены коэффициенты усиления регулятора перепускной заслонки с обратной связью на основе частоты, амплитуды и фазы измеренных колебаний ДВД (TIP). В качестве примера, упомянутые коэффициенты усиления могут быть вычислены так, как раскрыто для этапа 312 фиг. 3. На этапе 505 скорость вращения турбонагнетателя и соответствующий коэффициент усиления регулятора могут быть сохранены в виде справочной таблицы в долговременной памяти контроллера двигателя, такого, как контроллер 12 на фиг. 1.
На фиг. 6 показано изменение параметров двигателя при обновлении коэффициента усиления регулятора перепускной заслонки с обратной связью во время работы двигателя. По оси х отложено время, которое увеличивается слева направо.
С момента времени Т0 до момента времени крутящий момент 601 остается между пороговыми значениями 610 и 611. Поскольку изменение запрашиваемого крутящего момента в период времени от Т0 до T1 находится в пределах порогового значения Th, контроллер двигателя (такой, как контроллер 12 на фиг. 1) может определять, что двигатель находится в режиме стабильной работы двигателя. Сигнал управления 602 перепускной заслонкой может быть выходным сигналом ПИД (PID) регулятора (такого, как ПИД (PID) регулятор 210 на фиг. 2). В качестве примера, сигнал управления перепускной заслонкой увеличенной амплитуды соответствует увеличенному проходному сечению перепускной заслонки. В другом примере, сигнал управления перепускной заслонкой увеличенной амплитуды соответствует уменьшенному проходному сечению перепускной заслонки. Проходное сечение 604 дросселя регулируют для достижения ДВК (MAP), соответствующего требуемому крутящему моменту.
В момент времени T1, если контроллер определяет, что требуется обновление коэффициента усиления регулятора перепускной заслонки с обратной связью, для приведения в действие перепускной заслонки подают сигнал управления перепускной заслонкой, вырабатываемый ступенчатой функцией (такой, как ступенчатая функция 201 на фиг. 2). Например, сигнал управления перепускной заслонкой может иметь периодическую прямоугольную форму. Как следствие, ДВД (TIP) колеблется относительно нулевого положения 631. Для поддержания неизменного ДВК (MAP) 605 контроллер двигателя регулирует положение дросселя приведением в действие его исполнительного механизма, что приводит к колебаниям положения дросселя. В качестве примера, положение дросселя может колебаться с той же частотой и в той же фазе, что и сигнал управления перепускной заслонкой. Из-за колебаний положения дросселя ДВК (MAP) остается относительно неизменным при колебаниях ДВД (TIP) между моментами времени Т1 и Т2.
В момент времени Т2, в ответ на увеличение запрашиваемого крутящего момента 601 двигателя выше порогового значения 610, контроллер двигателя прекращает колебания положения перепускной заслонки и положения дросселя. В качестве другого примера, контроллер двигателя может прекращать колебания положения перепускной заслонки в ответ на изменение запрашиваемого крутящего момента на величину, превышающую пороговое значение. В качестве другого примера, контроллер двигателя может прекращать колебания положения перепускной заслонки в ответ на превышение производной запрашиваемого крутящего момента по времени порогового значения. В другом примере контроллер двигателя может прекращать колебания положения перепускной заслонки в ответ на то, что измеренное или оцененное значение воздушного потока двигателя, пропущенное через фильтр высоких частот, выше, чем верхнее пороговое значение, или ниже нижнего порогового значения. Сигнал управления перепускной заслонкой является выходным сигналом ПИД (PID) регулятора, и дроссель приводят в действие для достижения требуемого ДВК (MAP).
Таким образом, может осуществляться настройка характеристик регулятора перепускной заслонки с обратной связью во время работы двигателя для компенсирования изменчивости от компонента к компоненту системы двигателя и деградации системы с течением времени. Коэффициенты усиления каждой из составляющих ПИД (PID) регулятора могут быть вычислены непосредственно на основе частоты, амплитуды и фазы колебаний ДВД (TIP) без длительной настройки.
Технический эффект моделирования системы двигателя в виде ПИЗ (GID) модели заключается в том, что коэффициенты усиления ПИД (PID) регулятора могут быть непосредственно найдены на основе колебаний ДВД (TIP). Технический эффект измерения сигнала ДВД (TIP) с низкой частотой дискретизации в случае, если время с момента предыдущего обновления справочной таблицы меньше порогового значения, заключается в экономии ресурсов контроллера, которые могут быть распределены для выполнения других задач. Технический эффект обновления в справочной таблице частоты и амплитуды колебаний ДВД (TIP), но не фазы, в случае, если время с момента предыдущего обновления справочной таблицы меньше порогового значения, заключается в том, что обновленная справочная таблица может быть определена достаточно быстро. Технический эффект измерения сигнала ДВД (TIP) с высокой частотой дискретизации в случае, если время с момента предыдущего обновления справочной таблицы больше порогового значения, заключается в том, что может быть точно определена фаза колебаний ДВД (TIP) для вычисления составляющей временной задержки модели системы. Технический эффект обновления параметров регулятора перепускной заслонки с обратной связью во время стабильной работы двигателя заключается в том, что регулятор перепускной заслонки с обратной связью может быть настроен с минимальным влиянием на дорожные качества транспортного средства. Технический эффект регулирования положения дросселя в ответ на сигнал управления перепускной заслонкой заключается в снижении флуктуаций давления воздуха в коллекторе. Технический эффект более частого обновления коэффициентов усиления модели объекта по сравнению с временной задержкой модели объекта заключается в том, что коэффициент усиления ПИД (PID) регулятора может быть определен достаточно быстро.
В качестве одного из вариантов осуществления, предложен способ для двигателя, содержащий: при стабильной работе двигателя, возбуждение колебаний давления наддува посредством приведения в действие перепускной заслонки, и компенсирование изменений давления воздуха в коллекторе соответствующими колебаниями дросселя; и обновление коэффициента усиления контроллера перепускной заслонки с обратной связью на основе колебаний давления наддува. В первом примере упомянутый способ дополнительно содержит обновление коэффициента усиления регулятора перепускной заслонки с обратной связью на основе амплитуды и частоты колебаний давления наддува, причем амплитуду и частоту колебаний давления наддува определяют на основе экстремумов и точек нулевых значений колебаний давления наддува. Второй пример способа опционально содержит первый пример, и дополнительно содержит увеличение коэффициента усиления регулятора перепускной заслонки с обратной связью при снижении амплитуды колебаний давления наддува. Третий пример способа опционально содержит первый и/или второй примеры, и дополнительно содержит вычисление коэффициента усиления регулятора перепускной заслонки с обратной связью посредством моделирования процесса двигателя в виде модели пропорционально-интегрирующей задержки. Четвертый пример способа опционально содержит один или более из примеров с первого по третий, и дополнительно содержит вариант, в котором регулятор перепускной заслонки с обратной связью включает в себя ПИД (PID) регулятор. Пятый пример способа опционально содержит один или более из примеров с первого по четвертый, и дополнительно содержит обновление пропорционального коэффициента усиления и дифференциального коэффициента усиления ПИД (PID) регулятора с помощью параметра настройки для обеспечения баланса между быстродействием и устойчивостью ПИД (PID) регулятора. Шестой пример способа опционально содержит один или более из примеров с первого по пятый, и дополнительно содержит вариант, в котором стабильная работа двигателя содержит изменение запрашиваемого крутящего момента менее чем на пороговое значение в течение заранее определенного периода времени. Седьмой пример способа опционально содержит один или более из примеров с первого по шестой, и дополнительно содержит прекращение колебаний давления наддува и колебаний дросселя в ответ на изменение запрашиваемого крутящего момента на величину, превышающую пороговое значение. Восьмой пример способа опционально содержит один или более из примеров с первого по седьмой, и дополнительно содержит определение колебаний дросселя на основе положения перепускной заслонки.
В качестве другого варианта осуществления, предложен способ для двигателя, содержащий: определение коэффициента усиления регулятора перепускной заслонки с обратной связью на основе скорости вращения турбонагнетателя по справочной таблице; во время стабильной работы двигателя, приведение в действие перепускной заслонки для возбуждения колебаний положения перепускной заслонки; и обновление справочной таблицы на основе колебаний давления наддува. Первый пример способа, дополнительно содержит уменьшение коэффициента усиления при увеличении скорости вращения турбонагнетателя. Второй пример способа опционально содержит первый пример, и дополнительно содержит определение коэффициента усиления на основе амплитуды и частоты колебаний давления наддува. Третий пример способа опционально содержит первый и/или второй примеры, и дополнительно содержит вариант, в котором обновление справочной таблицы осуществляется после первого интервала времени. Четвертый пример способа опционально содержит один или более из примеров с первого по третий, и дополнительно содержит вариант, в котором коэффициент усиления регулятора перепускной заслонки с обратной связью увеличивают при снижении частоты колебаний давления наддува, и увеличивают при снижении амплитуды колебаний давления наддува. Пятый пример способа опционально содержит один или более из примеров с первого по четвертый, и дополнительно содержит обновление справочной таблицы на основе фазы колебаний давления наддува после второго интервала времени, причем второй интервал времени длиннее первого интервала времени.
В другом варианте осуществления предложена система двигателя, содержащая: турбонагнетатель; перепускную заслонку, соединенную с турбиной турбонагнетателя; дроссель, регулирующий поток впускного воздуха во впускной коллектор двигателя; датчик выше по потоку от дросселя для определения давления наддува; датчик, соединенный со впускным коллектором двигателя, для определения давления воздуха в коллекторе; и контроллер двигателя, выполненный с сохраненными в долговременной памяти машиночитаемыми инструкциями для: приведения в действие перепускной заслонки посредством регулятора перепускной заслонки с обратной связью; во время стабильной работы двигателя, приведения в действие перепускной заслонки для возбуждения колебаний давления наддува и приведения в действие дросселя в соответствии с колебаниями давления наддува; и обновления коэффициента усиления регулятора перепускной заслонки с обратной связью на основе колебаний давления наддува. В первом примере системы контроллер двигателя дополнительно выполнен с возможностью обновления коэффициента усиления регулятора перепускной заслонки с обратной связью на основе экстремумов и точек нулевых значений измеренного давления наддува. Второй пример системы опционально содержит первый пример, и дополнительно содержит вариант, в котором для поддержания постоянного давления воздуха в коллекторе приводят в действие дроссель. Третий пример системы опционально содержит первый и/или второй примеры, и дополнительно содержит электромотор, причем контроллер двигателя дополнительно выполнен с возможностью использования электромотора для компенсирования воздействия колебаний давления наддува на выходной крутящий момент. Четвертый пример системы опционально содержит один или более из примеров с первого по третий, и дополнительно содержит вариант, в котором контроллер двигателя дополнительно выполнен с возможностью создания колебаний крутящего момента, вырабатываемого генератором, для поддержания постоянного выходного крутящего момента.
Необходимо отметить, что примеры приведенных здесь алгоритмов управления и оценки могут использоваться с различными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти, и могут исполняться системой управления, содержащей контроллеры в сочетании с различными датчиками, приводами и другими компонентами двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и тому подобные.
Таким образом, различные описанные действия, процессы и/или функции могут быть выполнены в указанной последовательности, параллельно, или, в некоторых случаях, могут быть опущены. Аналогично, такой порядок обработки не обязателен для достижения преимуществ и реализации признаков раскрытых в настоящей заявке примеров осуществления, но приведен для простоты графического представления и описания. Одно или несколько описанных действий, процессов и/или функций могут быть выполнены повторно в зависимости от конкретной используемой стратегии. Более того, описанные действия, процессы и/или функции могут графически представлять код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, в которой описанные действия реализуются посредством исполнения инструкций в системе, причем раскрытые действия выполняются путем исполнения инструкций в системе, содержащей различные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что конфигурации и последовательности, раскрытые в данном документе, являются по своей сути примерами, и эти конкретные варианты осуществления не должны быть восприняты в ограничивающем значении, поскольку возможно множество модификаций. Например, вышеупомянутая технология может быть применена к V-образному шестицилиндровому, рядному четырехцилиндровому, рядному шестицилиндровому, V-образному двенадцатицилиндровому, оппозитному четырехцилиндровому и другим типам двигателей. Объем настоящего изобретения содержит все неизвестные и неочевидные сочетания и частичные сочетания различных систем, конфигураций, и других признаков, функций и/или свойств, раскрытых в данном документе.
В последующих пунктах формулы изобретения конкретно указаны определенные сочетания и частичные сочетания, которые следует считать новыми и неочевидными. Эти пункты формулы могут ссылаться на «элементы» или «первые элементы», или их эквиваленты. Такие пункты формулы следует считать содержащими возможность наличия одного или нескольких таких элементов, но не требующими наличия и не исключающими возможность наличия двух или большего количества таких элементов. Другие сочетания или частичные сочетания раскрытых признаков, функций, элементов и/или свойств могут быть заявлены посредством внесения поправок в настоящие пункты формулы или через включение новых пунктов формулы в настоящую или связанную заявку. Такие пункты формулы, вне зависимости от того, шире, уже, эквивалентные или отличные от исходных пунктов формулы изобретения, также включены в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОМПАЖА | 2016 |
|
RU2718368C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2694998C2 |
| СПОСОБЫ ДЛЯ ДВИГАТЕЛЯ, ИМЕЮЩЕГО ДРОССЕЛЬ И ТУРБОНАГНЕТАТЕЛЬ С ПЕРЕПУСКНОЙ ЗАСЛОНКОЙ ДЛЯ ОТРАБОТАВШИХ ГАЗОВ, И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2014 |
|
RU2678606C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВЕНТИЛЯЦИИ КАРТЕРА ДВИГАТЕЛЯ С НАДДУВОМ | 2016 |
|
RU2717864C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДИАГНОСТИКИ ДАТЧИКА СОДЕРЖАНИЯ КИСЛОРОДА В ПРИТОЧНОМ ВОЗДУХЕ ПО ДАВЛЕНИЮ | 2015 |
|
RU2710328C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ С НАДДУВОМ (ВАРИАНТЫ) | 2015 |
|
RU2687853C2 |
| СИСТЕМА ДЛЯ ВЕНТИЛЯЦИИ КАРТЕРА ДВИГАТЕЛЯ | 2016 |
|
RU2704519C1 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ С НАДДУВОМ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2709584C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РЕГУЛЯТОРОМ ДАВЛЕНИЯ НАДДУВА (ВАРИАНТЫ) | 2015 |
|
RU2696168C2 |
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЗМОМ ПЕРЕПУСКНОЙ ЗАСЛОНКИ (ВАРИАНТЫ) | 2015 |
|
RU2692183C2 |
Изобретение может быть использовано в двигателях внутреннего сгорания с наддувом. Способ для двигателя заключается в том, что во время стабильной работы двигателя возбуждают колебания давления наддува посредством приведения в действие перепускной заслонки и компенсируют изменение давления воздуха в коллекторе соответствующими колебаниями дросселя. Обновляют коэффициент усиления регулятора перепускной заслонки с обратной связью на основе колебаний давления наддува. Раскрыт вариант способа для двигателя. Технический результат заключается в упрощении определения параметров настройки регулятора и снижении времени определения параметров. 2 н. и 13 з.п. ф-лы, 6 ил.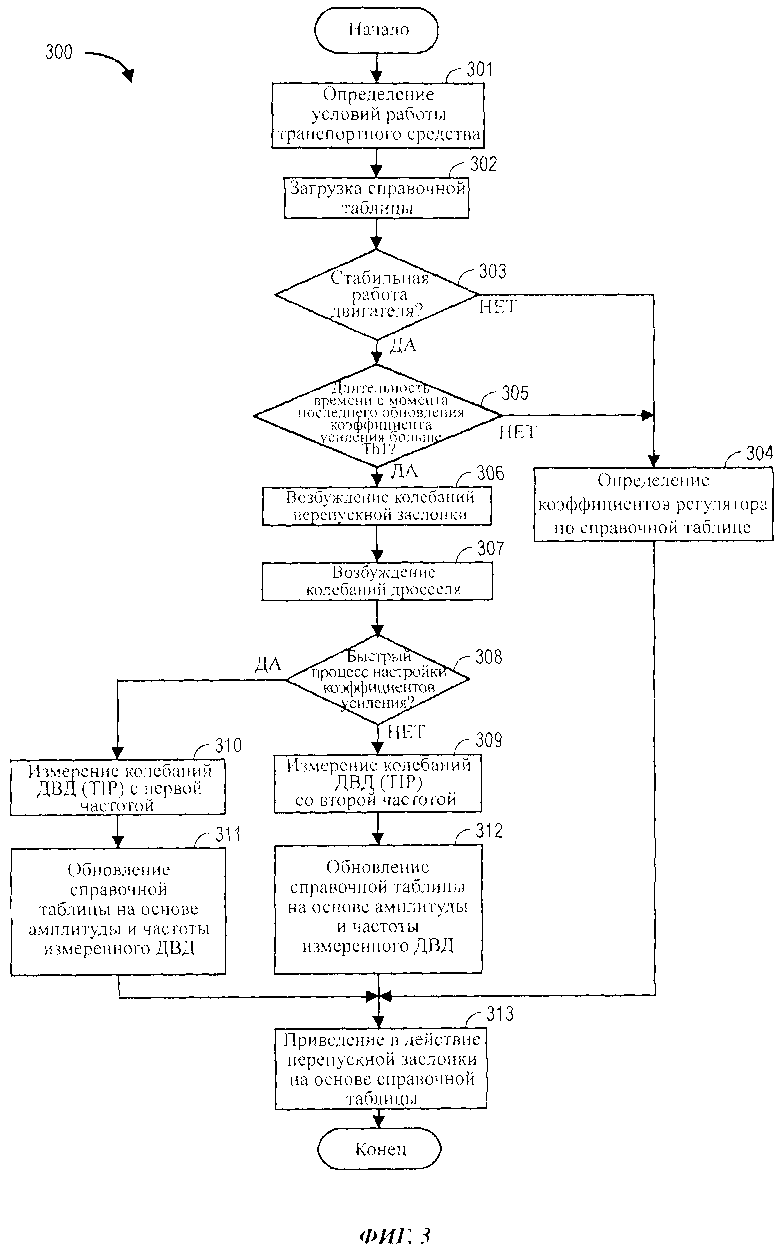
1. Способ для двигателя, в котором:
во время стабильной работы двигателя возбуждают колебания давления наддува посредством приведения в действие перепускной заслонки и компенсируют изменение давления воздуха в коллекторе соответствующими колебаниями дросселя; и
обновляют коэффициент усиления регулятора перепускной заслонки с обратной связью на основе колебаний давления наддува.
2. Способ по п. 1, в котором дополнительно обновляют коэффициент усиления регулятора перепускной заслонки с обратной связью на основе амплитуды и частоты колебаний давления наддува, причем частоту колебаний наддува определяют на основе экстремумов и точек нулевых значений колебаний давления наддува; и
корректируют сигнал, подаваемый исполнительному механизму перепускной заслонки, на основе обновленного коэффициента усиления.
3. Способ на п. 1, в котором дополнительно увеличивают коэффициент усиления регулятора перепускной заслонки с обратной связью при снижении амплитуды колебаний давления наддува.
4. Способ по п. 2, в котором управление перепускной заслонкой осуществляют с использованием обновленного коэффициента усиления.
5. Способ по п. 1, в котором регулятор перепускной заслонки с обратной связью включает в себя ПИД (PID) регулятор.
6. Способ по п. 5, в котором дополнительно обновляют пропорциональный коэффициент усиления, интегральный коэффициент усиления и дифференциальный коэффициент усиления ПИД (PID) регулятора с помощью параметра настройки для обеспечения баланса между быстродействием и устойчивостью ПИД (PID) регулятора.
7. Способ по п. 1, в котором стабильная работа двигателя содержит изменение запрашиваемого крутящего момента менее чем на пороговое значение в течение заранее определенного периода времени.
8. Способ по п. 1, в котором дополнительно прекращают колебания давления наддува и колебания дросселя в ответ на изменение запрашиваемого крутящего момента на величину, превышающую пороговое значение.
9. Способ по п. 1, в котором дополнительно определяют колебания дросселя на основе положения перепускной заслонки.
10. Способ для двигателя, в котором:
определяют коэффициент усиления регулятора перепускной заслонки с обратной связью на основе скорости вращения турбонагнетателя по справочной таблице;
во время стабильной работы двигателя приводят в действие перепускную заслонку для возбуждения колебаний положения перепускной заслонки; и
обновляют справочную таблицу на основе колебаний давления наддува.
11. Способ по п. 10, в котором дополнительно уменьшают коэффициент усиления при увеличении скорости вращения турбонагнетателя.
12. Способ по п. 10, в котором дополнительно определяют коэффициент усиления на основе амплитуды и частоты колебаний давления наддува.
13. Способ по п. 12, в котором обновление справочной таблицы осуществляют после первого интервала времени.
14. Способ по п. 13, в котором коэффициент усиления регулятора перепускной заслонки с обратной связью увеличивают при снижении частоты колебаний давления наддува, и увеличивают при снижении амплитуды колебаний давления наддува.
15. Способ по п. 13, в котором дополнительно обновляют справочную таблицу на основе фазы колебаний давления наддува после второго интервала времени, причем второй интервал времени длиннее первого интервала времени.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 6012289 A, 11.01.2000 | |||
| Устройство для изготовления оболочковых стержней | 1961 |
|
SU145314A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 6161384 A, 19.12.2000. | |||

