Область техники
Настоящая заявка относится к способам диагностирования ухудшения состояния дросселя в рециркуляционном клапане компрессора, установленном параллельно впускному компрессору в двигателе внутреннего сгорания.
Уровень техники и сущность изобретения
Системы двигателя могут быть выполнены с устройствами наддува, такими как турбонагнетатели или нагнетатели, для обеспечения подачи наддувочного воздушного заряда и повышения максимальной мощности на выходе. Использование компрессора позволяет двигателю с меньшим рабочим объемом обеспечивать такую же мощность, как и двигатель с большим рабочим объемом, но при дополнительных преимуществах в экономии топлива. Однако, компрессоры подвержены помпажу. Например, когда водитель отпускает педаль акселератора, впускной дроссель двигателя закрывается, что приводит к снижению прямого потока через компрессор и возможности помпажа. Помпаж может привести к проблемам с шумом, вибрацией и резкостью (ШВР), например, нежелательным шумам из впускной системы двигателя. В экстремальных ситуациях помпаж может послужить причиной повреждения компрессора. Для устранения помпажа компрессора системы двигателя могут содержать рециркуляционный клапан компрессора (РКК), установленный параллельно впускному компрессору, для возможности быстрого сброса давления наддува. РКК может рециркулировать сжатый воздух с выпуска компрессора на впуск компрессора, обеспечивая снижение давления на выпуске компрессора.
РКК может содержать дроссель и датчик положения для индицирования положения дросселя РКК. При этом состояние РКК может ухудшаться со временем. Например, дроссель РКК может заедать в определенном положении и может не перемещаться при поступлении соответствующей команды. В одном из примеров заедание дросселя может произойти в полностью открытом положении. В качестве альтернативного варианта дроссель может заедать в полностью закрытом положении. В еще одном другом примере заедание дросселя может произойти в положении между полностью открытым и полностью закрытым положениями. Примерный подход для проверки, заело ли РКК в открытом положении, показан Вегенером и соавт. в патенте США 7926335. В настоящей заявке проводится анализ изменения давления наддува в ответ на срабатывание РКК. В частности, может быть диагностировано заедание РКК в преимущественно открытом положении, если давление наддува ниже по потоку от впуска компрессора не увеличивается согласно ожидаемому, когда РКК переводится в закрытое положение. В патенте США 7926335 в первую очередь показано индицирование заедания РКК в открытом или в преимущественно открытом положении.
Авторы настоящего изобретения выявили возможную проблему с вышеуказанным подходом. Например, изменение давления наддува может быть вызвано другими факторами, помимо изменения положения дросселя РКК. Например, давление наддува может колебаться в связи с изменениями положения педали (например, педали акселератора), изменением передачи, изменением момента зажигания и т.д. Шум от этих и других параметров может влиять на давление наддува. Соответственно, изменения давления наддува в ответ на срабатывание РКК не могут быть в эксклюзивном порядке отнесены к изменению положения РКК.
Авторы настоящего изобретения идентифицировали указанную выше проблему и предлагают способ, по крайней мере, частичного ее решения. В одном из примеров, способ для двигателя с наддувом содержит направление команды периодического сигнала на рециркуляционный клапан компрессора (РКК) и индицирование ухудшения состояния дросселя РКК на основе изменений давления на впуске впускного дросселя в ответ на команду периодического сигнала. Таким образом, может быть конкретно определено ухудшение состояния дросселя РКК.
Например, система двигателя может содержать компрессор с рециркуляционным каналом компрессора, соединяющим выпуск компрессора с впуском компрессора. В других вариантах осуществления канал рециркуляции может соединять выпуск охладителя наддувочного воздуха с впуском компрессора. Управление потоком, проходящим по рециркуляционному каналу, может быть осуществлено посредством рециркуляционного клапана компрессора (РКК). РКК может представлять собой рециркуляционный клапан компрессора с бесступенчатой регулировкой (РККБР). Контроллер двигателя выполнен с возможностью регулировки положения РКК на основе изменений в потоке воздуха через впускной дроссель для сокращения помпажа компрессора. Также контроллер двигателя может получать обратную связь об изменениях давления на впуске дросселя (ДВД) от датчика давления на впуске дросселя, находящегося выше по потоку от впускного дросселя и ниже по потоку от компрессора. Чтобы определить, ухудшилось ли состояние РКК (например, заедание в определенном положении), ДВД может быть измерено в ответ на заданное командой изменение положения РКК. Чтобы обеспечить, что на показания ДВД в минимальной степени воздействуют шумовые факторы, команда может содержать периодический сигнал. В одном из примеров периодическим сигналом может быть сигнал в форме меандра. Если изменения ДВД, по существу, соответствуют периодичности заданного командой периодического сигнала, то состояние РКК может быть не ухудшено (например, не заело). Однако, если изменения ДВД, по существу, не соответствуют схеме периодов заданного командой периодического сигнала, результаты диагностики РКК могут свидетельствовать об ухудшении его состояния.
Таким образом, ухудшение состояния РКК может быть определено более надежным способом. Путем направления периодического сигнала с конкретной периодичностью, воздействие шумовых факторов на давление на впуске дросселя (или давление наддува) может быть уменьшено. Также может быть осуществлено более точное определение ухудшения состояния РКК, в частности ухудшение состояния дросселя РКК. Далее, путем локализации ухудшения состояния до конкретного компонента РКК возможно снижение расходов на диагностические и ремонтные работы. В целом, техническое обслуживание двигателя может быть улучшено.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, предмет настоящего изобретения не ограничивается вариантами осуществления, позволяющими устранить недостатки, указанные выше, в какой-либо части изобретения.
Краткое описание чертежей
ФИГ. 1 иллюстрирует вариант осуществления двигателя с наддувом, предполагающий использование рециркуляционного клапана компрессора (РКК).
ФИГ. 2 содержит высокоуровневую функциональную схему алгоритма, определяющего наличие ухудшения состояния РКК.
ФИГ. 3 содержит высокоуровневую функциональную схему алгоритма во время работы двигателя для выявления различия ухудшения состояния дросселя РКК от ухудшения состояния датчика положения РКК.
ФИГ. 4 содержит высокоуровневую функциональную схему сравнения примерных корректирующих регулировок в ответ на определение ухудшения состояния дросселя РКК с корректирующими регулировками в ответ на определение ухудшения состояния датчика положения РКК.
ФИГ. 5 содержит высокоуровневую функциональную схему алгоритма, который может быть внедрен посредством входного воздействия водителя для определения того, с чем связано ухудшение состояния РКК, с ухудшением состояния датчика положения или дросселя РКК.
ФИГ. 6 содержит высокоуровневую функциональную схему для определения ухудшения состояния РКК, при этом сокращая факторы шума, которые могут повлиять на давление на впуске дросселя.
ФИГ. 7 иллюстрирует пример работы для установления различия между ухудшением состояния датчика положения РКК и ухудшением состояния дросселя РКК.
ФИГ. 8 иллюстрирует пример работы для диагностирования дросселя РКК на основе давления на впуске дросселя (ДВД) с сокращением шума от других факторов, которые могут повлиять на показания ДВД.
Осуществление изобретения
Приведенное ниже описание касается систем и способов диагностирования ухудшения состояния рециркуляционного клапана компрессора (РКК) в системе двигателя с наддувом, такой как система, изображенная на ФИГ. 1. Контроллер может быть выполнен с возможностью выполнения управляющего алгоритма, такого, как алгоритм, показанный на ФИГ. 2, для диагностирования ухудшения состояния РКК. Таким образом, РКК может содержать дроссель, положение которого может регулировать контроллер на основе условий работы двигателя. РКК может также содержать датчик положения для подтверждения изменения положения дросселя РКК в ответ на команду контроллера. Контроллер выполнен с возможностью выявления различия между ухудшением состояния дросселя РКК и ухудшением состояния датчика положения РКК посредством выполнения управляющего алгоритма, например, алгоритма на ФИГ. 3, во время работы двигателя. Ухудшение состояния дросселя РКК можно отличить от ухудшения состояния датчика положения РКК на основе давления на впуске дросселя и заданного командой положения дросселя РКК. Дополнительно, показания датчика положения в ответ на заданное командой положение дросселя РКК могут быть использованы для установления различия между ухудшением состояния дросселя и ухудшением состояния датчика положения РКК (ФИГ. 7). В ответ на определение ухудшения состояния РКК могут быть отрегулированы различные параметры и приводы двигателя для обеспечения требуемой работы двигателя (ФИГ. 4). Дополнительное подтверждение ухудшение состояния датчика положения или дросселя РКК может быть обеспечено через активацию алгоритма, например, показанного на ФИГ. 5, посредством входного воздействия водителя. Дополнительно, контроллер может быть выполнен с возможностью выполнения управляющего алгоритма, такого, как алгоритм, показанный на ФИГ. 6, с целью удостоверения, что изменения в давлении на входе в дроссель обусловлены регулировкой положения РКК. В частности, ухудшение состояния дросселя РКК может быть определено посредством направления периодического сигнала на РКК и наблюдения за изменением давления на впуске дросселя (ФИГ. 8). Таким образом, ухудшение состояния дросселя РКК может быть отделено от ухудшения состояния датчика положения РКК, и может быть повышено качество технического обслуживания РКК.
ФИГ. 1 содержит схематическое изображение примерной системы 100 двигателя с турбонагнетателем, содержащей многоцилиндровый двигатель 10 внутреннего сгорания и параллельно работающие турбонагнетатели 120 и 130. В качестве примера, не имеющего ограничительного характера, система 100 двигателя может быть использована как часть движительной системы автомобиля. Система 100 двигателя может получать приточный воздух через впускной канал 140. Впускной канал 140 может содержать воздушный фильтр 156. Система 100 двигателя может быть представлена системой двигателя с раздельными циклами, отличающейся тем, что впускной канал 140 разветвляется ниже по потоку от воздушного фильтра 156 на первый и второй ответвительные впускные каналы, каждый из которых содержит компрессор турбонагнетателя. В получившейся конфигурации по крайней мере часть приточного воздуха направляется в компрессор 122 турбонагнетателя 120 по первому ответвительному впускному каналу 142, и по крайней мере другая часть приточного воздуха направляется в компрессор 132 турбонагнетателя 130 по второму ответвительному впускному каналу 144 впускного канала 140. Первая часть общего объема приточного воздуха, сжатого компрессором 122, может быть направлена на впускной коллектор 160 по первому параллельному ответвительному впускному каналу 146. Таким образом, впускные каналы 142 и 146 формируют первое комбинированное ответвление впускной системы двигателя. Подобным образом, вторая часть общего объема приточного воздуха может быть сжата компрессором 132 и может быть направлена на впускной коллектор 160 по второму параллельному ответвительному впускному каналу 148. Таким образом, впускные каналы 144 и 148 формируют второе комбинированное ответвление впускной системы двигателя. Как показано на ФИГ. 1, приточный воздух из впускных каналов 146 и 148 может быть воссоединен по общему впускному каналу 149 перед тем, как попасть во впускной коллектор 160, из которого приточный воздух подают в двигатель.
Согласно некоторым примерам впускной коллектор 160 может содержать датчик 182 давления во впускном коллекторе для определения давления воздуха в коллекторе (ДВК) и/или датчик температуры 183 во впускном коллекторе для определения температуры воздуха в коллекторе (ТВК), каждый из которых связан с контроллером 12: Общий впускной канал 149 может содержать охладитель 154 наддувочного воздуха и впускной дроссель 158. Положение впускного дросселя 158 регулируют с помощью привода дросселя (не показан), соединенного с возможностью связи с контроллером 12. Датчик 173 давления на входе дросселя (ДВД) может быть подсоединен к общему впускному каналу 149 в точке выше по потоку от впускного дросселя 158 и ниже по потоку от охладителя 154 воздуха. Также датчик 173 ДВД может быть установлен ниже по потоку от компрессоров 122 и 132. Давление на входе дросселя, также называемое давлением наддува или давлением наддувочного воздуха, может быть определено датчиком 173 ДВД.
Канал 150 рециркуляции компрессора может быть предусмотрен в целях предотвращения помпажа компрессора. В частности, для снижения помпажа компрессора, например, в случае отпускания педали акселератора водителем, давление наддува может быть стравлено из впускного коллектора из точки ниже по потоку от охладителя 154 воздуха и выше по потоку от впускного дросселя 158 во впускной канал 140 (в частности, ниже по потоку от воздушного фильтра 156 и выше по потоку от места соединения впускных каналов 142 и 144). Путем стравливания наддувочного воздуха из точки выше по потоку от впускного дросселя в точку ниже по потоку от впуска компрессора, давление наддува можно быстро понизить, тем самым осуществляя управление наддувом.
Поток через канал 150 рециркуляции компрессора можно регулировать путем регулировки позиции рециркуляционного клапана компрессора (РКК), установленного на нем. РКК может также быть назван антипомпажным клапаном компрессора, перепускным клапаном компрессора (ПКК), обводным клапаном и т.д. Согласно изображенному примеру, рециркуляционный клапан компрессора может быть представлен клапаном 152 с бесступенчатой регулировкой, который может быть приведен в полностью открытое положение, полностью закрытое положение или любое промежуточное положение. Таким образом, рециркуляционный клапан компрессора также может именоваться рециркуляционным клапаном компрессора с бесступенчатой регулировкой или РККБР. Согласно изображенному примеру, РККБР 152 выполнен как дроссельная заслонка, тем не менее, в других вариантах осуществления РККБР может быть в другом исполнении (напр., как тюльпанообразный клапан). Соответственно, РККБР 152 может содержать дроссель (напр., дроссельную заслонку), также, как и датчик положения для информирования контроллера 12 об изменениях в положении дросселя РККБР. Датчик положения дросселя РККБР (или просто РКК) может также быть назван датчиком положения дросселя (ДПД) или датчиком положения дросселя РККБР. Следует понимать, что несмотря на то, что на ФИГ. 1 РККБР изображен в исполнении для двигателя с двумя турбонагнетателями и конфигурацией цилиндров V-6, РККБР может подобным же образом быть применен в других конфигурациях двигателя, таких как I-3, I-4, V-8 и других конфигурациях с одним или несколькими турбонагнетателями.
В альтернативной конфигурации канал рециркуляции компрессора может быть расположен таким образом, чтобы сжатый воздух поступал из точки выше по потоку от охладителя 154 воздуха в точку выше по потоку от компрессоров 122 и 132. В другой конфигурации могут быть предусмотрены два рециркуляционных канала, каждый из которых оснащен рециркуляционным клапаном и расположен так, чтобы сжатый воздух поступал с выпуска компрессора на впуск компрессора. Следует также иметь в виду, что способы, раскрытые в настоящей заявке, могут быть применены к рециркуляционному клапану компрессора без бесступенчатой регулировки.
В номинальных рабочих условиях рециркуляционный клапан 152 компрессора с бесступенчатой регулировкой может находится в номинально закрытом или почти закрытом положении. В таком положении клапан может работать с известной или несущественной утечкой. Затем, в ответ на возникновение помпажа степень открытия РККБР 152 может быть увеличена. В некоторых вариантах осуществления один или более датчиков могут быть подсоединены к рециркуляционному каналу 150 компрессора для определения массы потока рециркуляционного воздуха, поступившего со впуска дросселя во впускной канал. Различными датчиками могут быть, например, датчики давления, температуры и/или датчики расхода.
В альтернативных вариантах осуществления рециркуляционный клапан компрессора может быть выполнен в виде двухпозиционного клапана, регулируемого по одному из двух положений - полностью открыт или полностью закрыт. Однако, регулировка наддува может быть улучшена при помощи РККБР. В дополнение к этому, контроль наддува и запас по помпажу может быть увеличен при скоординированной работе РККБР и регулятора давления наддува. В связи с этим, воздействие открытия или закрытия РККБР 152 на давление наддува может быть фактически мгновенным. Это обеспечивает быстрый контроль наддува и помпажа.
Двигатель 10 может содержать множество цилиндров 14. Согласно изображенному примеру, двигатель 10 содержит шесть цилиндров с V-образным расположением. В частности, шесть цилиндров расположены в два ряда, первый ряд 13 и второй ряд 18, по три цилиндра в каждом ряду. Согласно альтернативным примерам, двигатель 10 может включать в себя два или более цилиндров, например 4, 5, 8, 10 или более. В таких вариантах цилиндры могут быть разделены поровну и расположены в альтернативных конфигурациях, таких как V-образно, в один ряд, в виде квадрата, и т.д. Каждый цилиндр 14 может быть оснащен топливной форсункой 166. В изображенном примере топливная форсунка 166 представляет собой установленную в цилиндре форсунку непосредственного впрыска. Тем не менее, в других примерах топливная форсунка 166 может быть выполнена в виде топливной форсунки распределенного впрыска.
Приточный воздух, подаваемый в каждый цилиндр 14 (в настоящей заявке также называемый камерой 14 сгорания) по общему впускному каналу 149, может быть использован для сгорания топлива, а продукты сгорания могут далее выводиться через параллельные выпускные каналы, индивидуальные для каждого ряда. Согласно изображенному примеру, первый ряд 13 цилиндров двигателя 10 может выводить продукты сгорания через первый параллельный выпускной канал 17, и второй ряд 18 цилиндров может выводить продукты сгорания через второй параллельный выпускной канал 19. Любой из первого и второго параллельных выпускных каналов 17 и 19 может также содержать турбину турбонагнетателя. В частности, продукты сгорания, выводимые через выпускной канал 17 могут направляться на газовую турбину 124 турбонагнетателя 120, которая в свою очередь может обеспечивать механический привод для компрессора 122 посредством вала 126 для обеспечения компрессии приточного воздуха. В качестве альтернативного варианта, часть или весь объем отработавших газов, проходящих через выпускной канал 17, может направляться регулятором 128 давления наддува в обход газовой турбины 124 по перепускному каналу 123 турбины. Подобным же образом, продукты сгорания, выходящие по выпускному каналу 19, могут быть направлены через газовую турбину 134 турбонагнетателя 130, которая в свою очередь может обеспечивать механический привод для компрессора 132 посредством вала 136 для обеспечения компрессии приточного воздуха, поступающего по второму ответвительному впускному каналу 144 впускной системы двигателя. В качестве альтернативного варианта, часть или весь объем отработавших газов, проходящих через выпускной канал 19, может направляться регулятором 138 давления наддува в обход газовой турбины 134 по перепускному каналу 133 турбины.
Согласно некоторым примерам, газовые турбины 124 и 134 могут быть выполнены в виде турбин с изменяемой геометрией, в которых положение лопастей (или лопаток) турбинного колеса может изменяться контроллером 12 для регулировки уровня энергии, получаемой за счет потока отработавших газов и сообщаемой соответствующему компрессору. В качестве альтернативного варианта, газовые турбины 124 и 134 могут быть выполнены в виде турбин с переменным соплом, в которых положение турбинного сопла может изменяться контроллером 12 для регулировки уровня энергии, получаемой за счет потока отработавших газов и передаваемой соответствующему компрессору. Например, система управления может быть сконфигурирована на независимое регулирование положения лопаток или сопла газовых турбин 124 и 134 при помощи соответствующих приводов.
Отработавшие газы в первом параллельном выпускном канале 17 могут быть направлены в атмосферу по ответвительному выпускному каналу 170, в то время как отработавшие газы во втором параллельном выпускном канале 19 могут быть направлены в атмосферу по ответвительному выпускному каналу 180. Выпускные каналы 170 и 180 могут содержать одно или более устройств доочистки, таких как катализатор и один или более датчиков отработавших газов (не показаны).
В некоторых вариантах осуществления двигатель 10 может дополнительно предусматривать один или более каналов рециркуляции отработавших газов (РОГ) для отвода по крайней мере части отработавших газов из первого и второго параллельных выпускных каналов 17 и 19 и/или первого и второго параллельных ответвительных выпускных каналов 170 и 180 на первый и второй ответвительные впускные каналы 142 и 144 и/или первый и второй параллельные ответвительные впускные каналы 146 и 148 впускного коллектора 160. Для этого могут быть предусмотрены контуры РОГ высокого давления для обеспечения РОГ высокого давления (РОГ-ВД) и контуры РОГ низкого давления для обеспечения РОГ низкого давления (РОГ-НД). Если предусмотрено, РОГ-ВД может быть обеспечена при отсутствии наддува от турбонагнетателей 120, 130, тогда как РОГ-НД может быть обеспечена при наличии наддува от турбонагнетателя и/или при температуре отработавших газов выше порогового значения. Согласно еще другим примерам, как РОГ-ВД, так и РОГ-НД могут обеспечиваться одновременно. Контуры РОГ низкого давления могут отводить по крайней мере часть отработавших газов из каждого из параллельных ответвительных выпускных каналов, ниже по потоку от газовой турбины, на соответствующий ответвительный впускной канал выше по потоку от компрессора. Каждый из контуров РОГ-НД может быть снабжен соответствующими клапанами РОГ-НД для управления расходом отработавших газов в канале РОГ-НД, а также соответствующими охладителями наддувочного воздуха для понижения температуры отработавших газов, перенаправляемых на впуск двигателя. Контуры РОГ высокого давления могут отводить по крайней мере часть отработавших газов из каждого из параллельных выпускных каналов, выше по потоку от газовой турбины, на соответствующий параллельный впускной канал ниже по потоку от компрессора. Как показано, контур 177 РОГ высокого давления может отводить часть отработавших газов из первого параллельного выпускного канала 17 на первый параллельный ответвительный впускной канал 146. Подобным же образом, контур 197 РОГ высокого давления может отводить часть отработавших газов из второго параллельного выпускного канала 19 на второй параллельный ответвительный впускной канал 148. Расход РОГ в контурах РОГ-ВД может регулироваться соответствующими клапанами РОГ-ВД и охладителями наддувочного воздуха РОГ-ВД (не показаны). Таким образом, расход РОГ в контуре 197 РОГ высокого давления может регулироваться клапаном 195 РОГ-ВД, в то время как расход РОГ в контуре 177 РОГ высокого давления может регулироваться клапаном 175 РОГ-ВД.
Положение впускного и выпускного клапанов каждого из цилиндров 14 может регулироваться при помощи гидравлических толкателей, соединенных со штангами толкателей клапанов, или при помощи механизма переключения профиля кулачков, в котором используются выступы кулачков. Согласно данному примеру, как минимум впускные клапаны каждого из цилиндров 14 могут регулироваться при помощи кулачкового привода. В частности, система 25 кулачкового привода впускного клапана может содержать один или более кулачков и может использовать изменение фаз кулачкового распределения или подъема впускных и/или выпускных клапанов. В других вариантах осуществления впускные клапаны могут регулироваться системой электропривода клапанов. Подобным же образом, выпускные клапаны могут регулироваться системами кулачкового привода или системой электропривода клапанов. Системы кулачкового привода могут содержать один или более кулачков и могут применять одну или более из следующих систем: переключения профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК), которые могут управляться контроллером 12 для изменения работы клапанов.
Системой 100 двигателя можно управлять, по крайней мере, частично с помощью системы 15 управления, содержащей контроллер 12, и с помощью входных данных от водителя 190 автомобиля через вводное устройство 192. Согласно данному примеру, вводное устройство 192 содержит педаль акселератора и датчик 194 положения педали для создания сигнала ПП, пропорционального положению педали.
Система 15 управления показана с возможностью получения информации от множества датчиков 16 (различные примеры которых раскрыты в настоящей заявке) и передачи управляющих сигналов на множество приводов 81. В качестве одного примера, датчики 16 могут содержать датчик 173 ДВД, датчик влажности, датчик 182 ДВК и датчик 183 ТВК. Согласно некоторым примерам, датчик температуры на входе дросселя, измеряющий температуру на входе дросселя (ТВД), может быть установлен выше по потоку от впускного дросселя 158. Согласно другим примерам, один или более каналов РОГ могут содержать датчики давления, температуры, воздушно-топливного отношения для определения характеристик расхода РОГ. В качестве другого примера, приводы 81 могут содержать РККБР 152, топливную форсунку 166, клапаны 175 и 195 РОГ-ВД, клапаны РОГ-НД (не показаны), впускной дроссель 158 и регуляторы 128, 138 давления наддува. Другие приводы, такие как разнообразные дополнительные клапаны и дроссели, могут быть подсоединены к системе 100 двигателя в различных местах. Контроллер 12 может получать входные данные от различных датчиков, обрабатывать входные данные и задействовать приводы в ответ на обработанные входные данные на основе инструкции или кода, запрограммированного в нем, в соответствии с одним или более алгоритмами. Примерные управляющие алгоритмы раскрываются в настоящей заявке в соответствии с ФИГ. 2-6.
Настоящее описание изобретения раскрывает способы выявления различия между ухудшением состояния дросселя РККБР и ухудшением состояния датчика положения РККБР. Следует отметить, что в данном раскрытии термины РКК и РККБР взаимозаменяемы и обозначают рециркуляционный клапан компрессора, который может быть с бесступенчатой регулировкой. В одном из примеров состояние дросселя РККБР может быть ухудшено и он может заедать в открытом (преимущественно открытом) положении. В настоящей заявке наддув, создаваемый компрессором(ами), может постоянно отводиться, влияя на крутящий момент и ходовые характеристики. В другом примере состояние дросселя РККБР может быть ухудшено и он может заедать в закрытом (преимущественно закрытом) положении. Соответственно, РККБР может не уменьшать помпаж компрессора согласно требуемому, что может привести к образованию шума, вибрации и резкости (ШВР), а также ухудшению состояния компрессора. В еще одном примере состояние датчика положения РККБР может быть ухудшено. Например, состояние проводки и/или схемы обработки данных в датчике положения может быть ухудшено. Таким образом, датчик положения может отображать ошибочные данные о положении дросселя РККБР. Также может быть невозможен точный контроль положения дросселя. Соответственно, идентификация ухудшения состояния определенных компонентов может иметь преимущество для управления двигателем, а также для сокращения затрат на ремонт.
В качестве первого шага контроллер автомобиля может идентифицировать ухудшение состояния РККБР, когда датчик положения РККБР не указывает на ожидаемое изменение положения дросселя РККБР в ответ на заданное командой изменение положения дросселя РККБР. Ухудшение состояния РККБР может подразумевать одно или более из следующего: ухудшение состояния дросселя РККБР и ухудшение состояния датчика положения РККБР. На основе условий работы двигателя контроллер может затем идентифицировать, состояние какого из компонентов РККБР может быть ухудшено. В данном случае разница может быть основана на любом изменении давления на впуске дросселя (ДВД), согласно измеренному датчиком ДВД, и заданном командой изменении положения дросселя РККБР. Также показания датчика положения дросселя РККБР могут быть использованы в дополнение к показаниям ДВД и заданному командой изменению положения дросселя РККБР для идентифицирования ухудшения состояния определенного компонента РККБР.
Если условия работы двигателя не позволяют выявить различие между ухудшением состояния дросселя и датчика положения РККБР, ухудшение состояния определенного компонента может быть определено посредством входного воздействия водителя. В данном случае оператор может запустить алгоритм, где контроллер может дать команду изменения положения дросселя РККБР, измерить соответствующее изменение (или недостаточное изменение) ДВД и определить, состояние какого конкретно компонента ДВД ухудшено. В качестве дополнения или альтернативы ухудшение состояния дросселя РККБР может также быть определено путем направления периодического сигнала на дроссель РККБР посредством входного воздействия водителя. Таким образом, такая диагностика может также обеспечить, что на ДВД, согласно оценке датчика ДВД, не влияет шум от других параметров двигателя. Периодический сигнал может быть в форме меандра с периодом, основанным на турбодинамике. Полученные в результате изменения ДВД могут быть измерены, и ухудшение состояния дросселя РККБР может быть индицировано, если изменения ДВД по существу не соответствуют частоте и периодичности заданного командой сигнала. Если изменения ДВД по существу соответствуют периодичности заданного командой сигнала, дроссель РККБР может быть определен как надежный в эксплуатации.
Дополнительные подробности будут раскрыты со ссылкой на алгоритмы, показанные на ФИГ. 2 и 6 ниже. Следует отметить, что в алгоритмах 200, 300, 400, 500 и 600 датчик положения РККБР обозначен как ДПД (датчик положения дросселя), при этом показания ДПД индицируют положение дросселя РККБР и/или изменения положения дросселя РККБР. Также заданный командой сигнал или изменение положения РККБР указывает на заданное командой изменение положения дросселя РККБР. Следует отметить, что в алгоритмах 200, 300, 400, 500 и 600 РКК обозначен как РККБР, т.е. рециркуляционный клапан компрессора - рециркуляционный клапан компрессора с бесступенчатой регулировкой, как на ФИГ. 1. Таким образом, РККБР может быть отрегулирован до полностью открытого положения, полностью закрытого положения или любого промежуточного положения между полностью закрытым и полностью открытым.
ФИГ. 2 представляет примерный алгоритм 200 для определения ухудшения состояния РКК (или РККБР) в двигателе с наддувом, например, системе двигателя ФИГ. 1. В частности, ухудшение состояния РКК может быть, когда датчик положения РКК не указывает на ожидаемое изменение положения дросселя РКК в ответ на заданное командой изменение положения.
На шаге 202 алгоритм 200 может оценивать и/или измерять одно или более рабочих условий двигателя. Рабочие условия двигателя могут содержать нагрузку двигателя, давление наддува (или ДВД), частоту вращения двигателя, требуемый крутящий момент, воздушно-топливное отношение, продолжительность работы двигателя, температуру отработавших газов и т.д. Например, может быть определено ДВД для определения присутствия условий помпажа. В другом примере может быть определен требуемый крутящий момент и наддув, чтобы определить, требуется ли раскрутка турбонагнетателя.
На шаге 204 алгоритм 200 может определить, требуется ли изменение положения РКК (или РККБР). В качестве примера, если присутствуют условия помпажа, РККБР может быть отрегулирован из в основном закрытого положения до открытого (или преимущественно открытого) положения. В другом примере, если требуется раскрутка турбонагнетателя, РККБР может быть отрегулирован до более закрытого (или полностью закрытого) положения из преимущественно открытого положения. Если на шаге 204 определено, что изменение положения РККБР не требуется, алгоритм 200 может не продолжаться и быть завершен. С другой стороны, если требуется изменение положения РККБР, на шаге 206 алгоритм 200 дает команду требуемого изменения положения РККБР. В одном из примеров для сокращения помпажа, на РККБР может быть дана команда на более открытое положение. В другом примере, на РККБР может быть дана команда на более закрытое положение, для обеспечения увеличения уровня наддува.
На шаге 208 алгоритм 200 определяет, указывает ли датчик положения дросселя РККБР на ожидаемое изменение положения. В одном из примеров, если на дроссель РККБР дана команда на переход в преимущественно открытое положение из преимущественно закрытого положения, датчик положения может направлять сигнал соответствующего изменения положения дросселя РККБР в ответ на команду. Аналогично в другом примере, если на дроссель РККБР дается команда перехода в преимущественно закрытое положение из полностью открытого положения, датчик положения может индицировать соответствующее изменение положения дросселя РККБР. Если ответ - «да», алгоритм 200 переходит к шагу 210 без диагностирования РККБР на ухудшение состояния датчика положения или дросселя РККБР. Алгоритм 200 затем завершается. Если на шаге 208 датчик положения не направляет сигнал ожидаемого изменения положения, алгоритм 200 переходит к шагу 212 для определения ухудшения состояния РККБР. На шаге 214 может быть запущено дальнейшее диагностирование РККБР посредством запуска алгоритма 300 на ФИГ. 3, чтобы идентифицировать то, подразумевает ли ухудшение состояния РККБР ухудшение состояния датчика положения и/или ухудшения состояния дросселя РККБР. В ином случае в некоторых вариантах осуществления алгоритм 200 может активировать диагностический код, индицирующий ухудшение состояния РККБР, и запросить запуск алгоритма 500 на ФИГ. 5 посредством входного воздействия водителя после шага 212. Например, алгоритм 500 может быть запущен посредством входного воздействия водителя в сервисном центре, дилерском центре или других аналогичных местах, предлагающих услугу ремонта. Алгоритм 200 затем завершается.
Когда ухудшение состояния РККБР будет определено, контроллер может попытаться использовать имеющиеся условия работы двигателя с полученными командами привода (например, команды на РККБР) для выявления различия между ухудшением состояния дросселя РККБР и датчика положения РККБР (посредством алгоритма 300 на ФИГ. 3). Диагноз может далее быть подтвержден входным воздействием водителя посредством алгоритмов 500 (ФИГ. 5) и 600 (ФИГ. 6). Алгоритмы 500 и 600 могут применяться в качестве дополнения или альтернативы алгоритму 300. Если имеющиеся условия работы двигателя и полученные команды привода не могут отделить ухудшение состояния определенного компонента РККБР, дальнейшее диагностирование может быть проведено посредством входного воздействия водителя, как показано в алгоритмах 500 (ФИГ. 5) и 600 (ФИГ. 6).
Что касается ФИГ. 3, на ней изображен алгоритм 300 для идентификации ухудшения состояния определенного компонента РККБР во время работы двигателя. В частности, алгоритм может диагностировать ухудшение состояния датчика положения (ДПД) и/или дросселя РККБР на основе ДВД, показаний датчика положения и заданных командой изменений РККБР. Следует понимать, что алгоритм 300 может быть выполнен без входного воздействия водителя или ручного ввода команд, когда двигатель находится в работе.
На шаге 302 алгоритм 300 отслеживает команды на РККБР, полученные в результате изменения ДВД, согласно данным датчика ДВД (например, датчика 173 ДВД на ФИГ. 1), и соответствующие показания датчика положения при наличии. На шаге 304 алгоритм 300 определяет, была ли дана команда на закрытие РККБР, и происходит ли в результате увеличение ДВД, в то время как показания датчика положения отображают открытое положение РККБР. Например, на РККБР может быть дана команда закрытия, если происходит событие резкого нажатия на педаль акселератора для поднятия наддува на более высокий уровень. В одном из примеров на дроссель РККБР может быть дана команда перехода в полностью закрытое положение из полностью открытого положения. В другом примере на дроссель РККБР может быть дана команда перехода в полностью закрытое положение из преимущественно открытого положения. В еще одном примере на дроссель РККБР может быть дана команда перехода в преимущественно закрытое положение из преимущественно открытого положения. Если датчиком ДВД измерено увеличение ДВД, дроссель РККБР может находиться в заданном командой закрытом положении. Таким образом, дроссель РККБР может быть в полностью закрытом положении так, что через канал 150 рециркуляции компрессора на ФИГ. 1 не будет проходить поток воздуха или номинальный поток воздуха. Однако, если показания датчика ДПД не отображают соответствующие изменения положения дросселя РККБР, алгоритм 300 может перейти к шагу 306 для определения вероятности ухудшения состояния датчика положения РККБР. Таким образом, алгоритм 300 переходит к шагу 306, если на РККБР была дана команда закрытия, в результате чего увеличивается ДВД, в то время как показания датчика положения отображают открытое положение РККБР. В данном случае ДПД может показывать, что дроссель РККБР находится в открытом положении, которое может быть начальным положением дросселя РККБР перед получением команды закрытия от контроллера на шаге 304.
На шаге 306 алгоритм 300 может запустить алгоритм 400 на ФИГ. 4 для обеспечения восстановительных мер в ответ на определение вероятности ухудшения состояния датчика положения РККБР. Например, за определением ухудшения состояния датчика положения может последовать деактивация РККБР. Следовательно, в одном из примеров условия наддува и помпажа могут контролироваться посредством управления регулятором давления наддува, установленным параллельно газовой турбине турбонагнетателя. В других примерах один или более из следующих компонентов: впускной дроссель, изменяемые фазы кулачкового распределения и лопатки турбонагнетателя, - могут быть отрегулированы в ответ на деактивацию РККБР. Затем, на шаге 308 определение вероятности ухудшения состояния ДПД может быть подтверждено (по желанию) алгоритмом 500 на ФИГ. 5. Таким образом, алгоритм на ФИГ. 5 может быть запущен посредством входного воздействия водителя, например, в авторемонтной мастерской. Дополнительно на шаге 310 в ответ на индицирование ухудшения состояния ДПД может быть задан диагностический код, указывающий на вероятность ухудшения состояния ДПД, и может быть активирован световой индикатор неисправности (СИН) для уведомления водителя автомобиля.
Возвращаясь к шагу 304, если алгоритм 300 определяет, что на РККБР не дается команда закрытия, в результате чего не увеличивается ДВД, в то время как датчик положения показывает открытое положение РККБР, алгоритм 300 переходит к шагу 312 для подтверждения того, что на РККБР дается команда открытия с уменьшением в результате ДВД, в то время как ДПД показывает закрытое положение РККБР.
Например, на РККБР может быть дана команда открытия при индицировании условий помпажа. В одном из примеров на дроссель РККБР может быть дана команда перехода в полностью открытое положение из полностью закрытого положения. В другом примере на дроссель РККБР может быть дана команда перехода в полностью открытое положение из преимущественно закрытого положения. В еще одном примере на дроссель РККБР может быть дана команда перехода в преимущественно открытое положение из частично открытого положения. Если датчиком ДВД измерено уменьшение ДВД, дроссель РККБР может находиться в заданном командой открытом положении. В данном случае, если ДПД показывает, что дроссель РККБР находится в закрытом положении (или преимущественно закрытом положении), алгоритм 300 переходит к шагу 306 для определения вероятности ухудшения состояния датчика положения РККБР. Таким образом, алгоритм 300 может перейти к шагу 306, если на РККБР была дана команда открытия с увеличением в результате ДВД, в то время как показания датчика положения отображают открытое положение РККБР. ДПД может показывать, что дроссель РККБР находится в закрытом положении, которое может быть начальным положением дросселя РККБР перед получением команды открытия от контроллера на шаге 312.
На шаге 306, как раскрыто выше, может быть запущен алгоритм 400 на ФИГ. 4 для обеспечения корректирующих мер в ответ на определение вероятности ухудшения состояния датчика положения РККБР. На шаге 308 определение вероятности ухудшения состояния ДПД может быть подтверждено (по желанию) алгоритмом 500 на ФИГ. 5. Дополнительно, на шаге 310 в ответ на определение ухудшения состояния ДПД может быть задан диагностический код, указывающий на вероятность ухудшения состояния ДПД, и может быть активирован СИН для уведомления водителя автомобиля.
Возвращаясь на шаг 312, если определено, что на РККБР не дается команда открытия, алгоритм 300 переходит к шагу 314 для подтверждения того, требуют ли имеющиеся условия работы двигателя закрытия РККБР. Например, на РККБР может быть дана команда перехода в полностью закрытое положение. Дополнительно, на шаге 314 может быть подтверждено, что измеренное ДВД по существу не равно ожидаемому максимальному ДВД, и что ДПД показывает открытое (или преимущественно открытое) положение дросселя РККБР. Таким образом, для представленной модели двигателя, включая представленный размер РККБР, известные ограничения канала к РККБР, определенную конструкцию каждого впускного компрессора(ов) и газовых(ой) турбин(ы), определенный размер и конструкцию двигателя, и основываясь на рабочих характеристиках двигателя, таких как момент зажигания, угол впускного дросселя, тип топлива и т.д., можно вычислить максимально достижимое ДВД. Соответственно, если ожидаемое ДВД (например, максимальное ДВД) не совпадает с измеренным ДВД, когда на РККБР дается команда закрытия, в то время как ДПД показывает открытое (преимущественно открытое) положение дросселя РККБР, может быть определено ухудшение состояния дросселя РККБР. Алгоритм 300 переходит к шагу 316, если на РККБР была дана команда закрытия, и если увеличение ДВД в результате не равно ожидаемому максимальному ДВД, в то время как показания датчика положения отображают открытое положение РККБР.
На шаге 316 алгоритм 300 определяет вероятность ухудшения состояния дросселя РККБР. В частности, дроссель РККБР может заедать в открытом (преимущественно открытом) положении. Если дроссель РККБР заело в открытом положении (или преимущественно открытом положении), то может быть не достигнут достаточный наддув, и давление наддува на впуске впускного дросселя может быть ниже ожидаемого. Дополнительно, на основе определения ухудшения состояния дросселя РККБР (например, заедания в открытом положении) могут быть предприняты различные корректирующие меры на шаге 322, на основе алгоритма 400 на ФИГ. 4. Затем на шаге 324 может быть выполнено дальнейшее подтверждение ухудшения состояния дросселя РККБР посредством входного воздействия водителя. Это может быть запуск по выбору алгоритма 500 на ФИГ. 5 или алгоритма 600 на ФИГ. 6. На шаге 326 может быть задан соответствующий код диагностики, указывающий, что дроссель в ухудшенном состоянии (например, дроссель, заевший в открытом положении), и активирован СИН. После этого алгоритм 300 может быть завершен.
Если на шаге 314 на РККБР не дается команда закрытия, алгоритм 300 переходит к шагу 318 для подтверждения того, требуют ли имеющиеся условия работы двигателя открытия РККБР. В данном случае на дроссель РККБР может быть дана команда перехода в полностью открытое положение (или преимущественно открытое) из закрытого положения (или преимущественно закрытого положения). На шаге 318 также можно определить, не обеспечивает ли заданное командой открытие РККБР уменьшение ДВД, и ДПД показывает закрытое (или преимущественно закрытое) положение дросселя РККБР. Например, если дроссель РККБР не изменяет положение согласно команде перехода в более открытое положение, ДПД может оставаться на более высоком уровне, чем требуется. Если ДПД показывает, что дроссель РККБР не двигается и остается в закрытом (преимущественно закрытом) положении, возможно ухудшение состояния дросселя РККБР. В частности, дроссель РККБР может заедать в закрытом (преимущественно закрытом) положении. Поэтому, если уменьшение ДВД не измерено датчиком ДВД в ответ на заданное командой открытие РККБР, в то время как ДПД показывает закрытое (или преимущественно закрытое) положение дросселя РККБР, алгоритм 300 переходит к шагу 320 для определения вероятности ухудшения состояния дросселя РККБР (например, заедание в закрытом положении). Дополнительно, на шаге 322 могут быть начаты соответствующие корректирующие меры согласно алгоритму 400 на ФИГ. 4. Затем, на шаге 324 может быть выполнено дальнейшее подтверждение ухудшения состояния дросселя РКК посредством входного воздействия водителя. Это может быть запуск по выбору алгоритма 500 на ФИГ. 5 или алгоритма 600 на ФИГ. 6. На шаге 326 может быть задан соответствующий код диагностики, указывающий на то, что дроссель в ухудшенном состоянии (например, дроссель, заевший в закрытом положении), и активирован СИН. После этого алгоритм 300 может быть завершен.
Возвращаясь на шаг 318, если на РККБР не дается команда открытия (и в результате не наблюдается изменение ДВД, в то время как ДПД показывает, что дроссель РККБР закрыт), алгоритм 300 переходит к шагу 328 для ожидания и выполнения диагностического алгоритма 500 посредством входного воздействия водителя. Дополнительно, на шаге 330 может быть задан диагностический код «М» и может быть активирован СИН. В данном случае диагностический код «М» может показать, что требуется дальнейшее диагностирование посредством входного воздействия водителя, вследствие чего позднее может быть запущен диагностический алгоритм 500.
Таким образом, примерный способ для двигателя с наддувом может содержать установление различия между ухудшением состояния дросселя рециркуляционного клапана компрессора (РКК) и датчика положения РКК на основе давления на входе дросселя или заданного командой положения дросселя РКК. РКК может представлять собой рециркуляционный клапан компрессора с бесступенчатой регулировкой (РККБР). Установление различия между ухудшением состояния дросселя РКК и датчика положения РКК также может быть основано на показаниях датчика положения РКК в ответ на заданное командой положение дросселя РКК. Также давление на впуске дросселя может быть измерено выше по потоку от впускного дросселя во впускном канале двигателя с наддувом. Способ может дополнительно содержать индицирование ухудшения состояния датчика положения на основе изменения давления на впуске дросселя в ответ на заданное командой изменение положения дросселя РКК и недостаток изменения датчика положения в ответ на заданное командой изменение положения дросселя РКК (как на шаге 304 или 312 алгоритма 300). В ответ на индицирование ухудшения состояния датчика положения РКК способ может содержать деактивацию РКК в ответ на индицирование ухудшения состояния датчика положения РКК. Также, в ответ на деактивацию РКК способ может содержать регулировку одного или более из следующих компонентов: регулятора давления наддува, впускного дросселя и изменяемых фаз кулачкового распределения. Способ может также содержать индицирование ухудшения состояния дросселя РКК на основе недостатка изменения в отклике датчика положения в ответ на заданное командой изменение положения дросселя РКК и недостаток изменения давления на впуске дросселя в ответ на заданное командой изменение положения дросселя РКК. В данном случае ухудшение состояния дросселя РКК может предполагать одно из следующего: дроссель, заевший в открытом положении, и дроссель, заевший в закрытом положении. В качестве альтернативы или дополнения ухудшение состояния дросселя может предполагать один или более из следующих вариантов: дроссель, заевший в открытом положении, и дроссель, частично заевший в закрытом положении.
Другой пример способа может содержать приведение в действие рециркуляционного клапана компрессора с бесступенчатой регулировкой (РККБР), индицирование ухудшение состояния РККБР на основе обратной связи от датчика положения РКККБР, указывающего на отсутствие изменения положения дросселя РККБР в результате срабатывания, и установление различия между ухудшением состояния дросселя РККБР и датчика положения РККБР. Установление различия между ухудшением состояния дросселя РККБР и датчика положения РККБР может быть основано на давлении на впуске дросселя, при этом давление на впуске дросселя измеряется датчиком выше по потоку от впускного дросселя и ниже по потоку от впускного компрессора. Установление различия между ухудшением состояния дросселя РККБР и датчика положения РККБР может быть также основано на заданном командой изменении положения РККБР, ожидаемом изменении давления на впуске дросселя и обратной связи от датчика положения РККБР.
Например, способ может содержать индицирование ухудшения состояния датчика положения на основе увеличения давления на впуске дросселя в ответ на команду закрытия РККБР и обратную связь от датчика положения, указывающего на открытое положение РККБР. В другом примере способ может также содержать индицирование ухудшения состояния датчика положения на основе снижения давления на впуске дросселя в ответ на команду открытия РККБР и обратную связь от датчика положения, указывающего на закрытое положение РККБР. В еще одном примере способ может дополнительно содержать индицирование ухудшения состояния дросселя РККБР на основе недостатка изменения давления на впуске дросселя в ответ на команду закрытия РККБР и обратную связь от датчика положения, указывающего на открытое положение РККБР. В ином случае увеличение давления на впуске дросселя может не совпадать с ожидаемым увеличением давления на впуске дросселя в ответ на команду закрытия РККБР, и датчик положения может отображать открытое положение РККБР. В дополнительном примере способ может индицировать ухудшение состояния дросселя РККБР на основе недостатка изменения давления на впуске дросселя в ответ на команду открытия РККБР и обратную связь от датчика положения, указывающего на закрытое положение РККБР. В данном случае давление на впуске дросселя может не увеличиваться как ожидается, когда на РККБР дается команда открытия.
Что касается ФИГ. 4, на ней изображен примерный алгоритм 400, показывающий различные регулировки, которые могут быть выполнены на основе определения ухудшения состояния датчика положения (ДПД) дросселя РККБР или ухудшения состояния дросселя РККБР (например, дроссель заело в открытом или закрытом положении). В частности, требуемые уровни наддува могут быть достигнуты и контроль помпажа может быть выполнен посредством регулировки положений регулятора давления наддува, впускного дросселя, фаз газораспределения и т.д. Следует понимать, что алгоритм 400 может быть запущен только после определения ухудшения состояния ДПД или дросселя РККБР алгоритмом 300 на ФИГ. 3.
На шаге 402 алгоритм 400 подтверждает, что имеется ухудшение состояния ДПД РККБР или дросселя РККБР. В качестве примера может быть определено ухудшение состояния обоих компонентов РККБР на основе алгоритма 300 на ФИГ. 3. Если не определено ухудшение состояния ни одного из компонентов, на шаге 404 алгоритм 400 может не выполняться и быть завершен. Однако, если определено ухудшение состояния РККБР (например, ДПД или дросселя), алгоритм 400 переходит к шагу 406, где он может определить, имеется ли ухудшение состояния датчика положения РККБР (в частности, датчика положения дросселя РККБР). Например, ухудшение состояния ДПД может быть определено алгоритмом 300 на ФИГ. 3 на основе недостатка изменения показаний датчика положения, когда на РККБР дается команда перехода в закрытое положение, в то время как увеличение ДВД измеряется в ответ на команду. В другом примере ухудшение состояния ДПД может быть определено алгоритмом 300 на ФИГ. 3 на основе недостатка изменения показаний датчика положения, когда на РККБР дается команда перехода в открытое положение, в то время как уменьшение ДВД измеряется в ответ на команду.
Если ответ - «да», алгоритм 400 переходит к шагу 408 для деактивации дросселя РККБР, так как контроль положения датчиком положения может быть не достигнут, если ухудшено состояние датчика положения. Таким образом, РККБР может быть отключен и деактивирован. В качестве альтернативы, если ухудшено состояние датчика положения, а состояние дросселя РККБР не ухудшено, управление дросселем РККБР может осуществляться в открытом контуре на основе, например, давления в коллекторе. Таким образом, обеспечивается большая мощность двигателя относительно условия, когда дроссель РККБР полностью деактивирован. Затем, на шаге 410 алгоритм 400 может регулировать одно или более из следующего: положение регулятора давления наддува, впускной дроссель, фазы газораспределения (например, изменения фаз кулачкового распределения) и т.д. в ответ на деактивацию РККБР и на основе имеющихся условий работы двигателя. В одном из примеров, если требуется контроль помпажа, регулятор давления наддува может быть отрегулирован до более открытого положения, обеспечивающего сокращение уровня наддува. В качестве альтернативы открытие впускного дросселя может быть отрегулировано для уменьшения условий помпажа. В другом примере, если требуется более высокий уровень наддува, регулятор давления наддува может быть перемещен в более закрытое положение. Поток воздуха может быть отрегулирован посредством изменения фаз газораспределения в цилиндрах двигателя. Дополнительно, если турбонагнетатель двигателя имеет изменяемую геометрию, контроллер может регулировать положение лопастей (или лопаток) турбинного колеса для изменения уровня энергии, подаваемой на компрессор. Алгоритм 400 может быть завершен.
Если на шаге 406 определено, что состояние датчика положения РККБР не ухудшено, алгоритм 400 переходит к шагу 412 для подтверждения ухудшения состояния и заедания дросселя РККБР в открытом (или преимущественно открытом) положении. Если ответ - «да», на шаге 414 регулятор давления наддува может быть отрегулирован до более закрытого положения для обеспечения более высокого уровня наддува, если требуется. Как раскрыто ранее, РККБР может отводить наддув при заедании в открытом (или преимущественно открытом) положении и влиять на крутящий момент. Соответственно, регулятор давления наддува может быть перемещен в полностью закрытое (или преимущественно закрытое) положение для направления всех отработавших газов в газовую турбину турбонагнетателя, что обеспечит увеличение наддува. Если на шаге 412 определено, что дроссель РККБР не заел в открытом положении, алгоритм 400 переходит к шагу 416 для определения того, что дроссель РККБР заел в закрытом положении. Дополнительно, на шаге 418 регулятор давления наддува может быть отрегулирован до более открытого положения на основе условий работы двигателя. Например, если дроссель РККБР заело в закрытом (или преимущественно закрытом) положении, контроль помпажа может быть невозможен. Соответственно, если давление ниже по потоку от впускного(ых) компрессора(ов) увеличивается, регулятор давления наддува может быть открыт для уменьшения скорости турбонагнетателя и давления наддува на впуске впускного дросселя. Таким образом, различные приводы можно регулировать разными способами, когда определено ухудшение состояния датчика положения РККБР относительно того, когда определено ухудшение состояния дросселя РККБР.
Обращаясь к ФИГ. 5, на ней показан примерный алгоритм 500, отображающий диагностический алгоритм для выявления различия между ухудшением состояния ДПД РККБР и ухудшением состояния дросселя РККБР. Таким образом, алгоритм 500 может быть запущен контроллером на основе входного воздействия водителя, например, в дилерском центре, сервисном центре или автомастерской. Также алгоритм 500 может быть запущен командой ручного управления после начального определения ухудшения состояния РККБР, например, на шаге 212 алгоритма 200.
На шаге 502 контроллер может подтверждать запуск диагностического алгоритма. В данном случае оператор может запустить диагностический алгоритм, как в алгоритме 500. Если подтверждение не получено, алгоритм 500 может быть не запущен на шаге 504 и может быть завершен. Однако, если подтверждение получено на шаге 502, алгоритм 500 переходит к шагу 506, на котором на дроссель РККБР дается команда входного напряжения, в то время как осуществляется мониторинг ДВД. Входное напряжение в одном из примеров может переводить дроссель РККБР в полностью открытое положение из полностью закрытого положения. В другом примере входное напряжение может переводить дроссель РККБР в полностью закрытое положение из преимущественно открытого положения. Затем, на шаге 508 может быть определено, измеряется ли изменение ДВД датчиком ДВД. В одном из примеров, если дроссель РККБР перемещается в полностью закрытое положение, увеличение ДВД может быть измерено датчиком ДВД, если состояние дросселя РККБР не ухудшено. Если состояние дросселя РККБР ухудшено, может отсутствовать увеличение ДВД до получения входного напряжения. В качестве альтернативы, измеренное увеличение ДВД может не быть равным ожидаемому увеличению ДВД в ответ на заданное командой напряжение для закрытия дросселя РККБР, если состояние дросселя РККБР ухудшено. В другом примере уменьшение ДВД может быть измерено, если состояние дросселя РККБР не ухудшено и его переводят в открытое положение. Однако, если состояние дросселя РККБР ухудшено (например, заел в закрытом положении), возможно номинальное уменьшение ДВД. В качестве альтернативы, измеримое уменьшение ДВД может отсутствовать, если состояние дросселя РККБР ухудшено и он заел в закрытом положении.
Поэтому на шаге 508, если алгоритм 500 определяет, что наблюдается изменение ДВД в ответ на входное напряжение, и что изменение ДВД по существу равно ожидаемому изменению, алгоритм 500 переходит к шагу 510 для определения ухудшения состояния ДПД. Однако измеренное изменение ДВД может быть связано с факторами шума, например, моментом зажигания, изменениями положения педали, изменениями передачи трансмиссии и т.д. Соответственно, алгоритм 500 переходит к шагу 512 для подтверждения диагностики ухудшения состояния ДПД посредством запуска алгоритма 600 на ФИГ. 6. В другом примере диагностика может считаться завершенной на шаге 510, и может быть определено ухудшение состояния датчика положения РККБР. На шаге 518 по желанию может быть задан диагностический код, определяющий ухудшение состояния ДПД, и может быть активирован СИН. Таким образом, если после определения ухудшения состояния ДПД работа двигателя должна продолжаться, РККБР может быть деактивирован и отключен.
Если на шаге 508 алгоритм 500 определяет, что изменение ДВД отсутствует, на шаге 514 может быть подтверждено ухудшение состояния дросселя РККБР. В качестве альтернативы, может быть определено ухудшение состояния дросселя РККБР, если алгоритм 500 подтвердит, что изменение ДВД не равно ожидаемому изменению ДВД. Состояние дросселя РККБР может быть ухудшено таким образом, что в открытом (преимущественно открытом) положении будет происходить заедание. В другом примере состояние дросселя РККБР может быть ухудшено таким образом, что в закрытом (преимущественно закрытом) положении будет происходить заедание. Для дальнейшего подтверждения диагноза ухудшения состояния дросселя РККБР, алгоритм 500 может перейти к шагу 516 для запуска алгоритма 600 на ФИГ. 6. Алгоритм 600 будет дополнительно раскрыт ниже. На шаге 518 может быть задан диагностический код, указывающий на ухудшение состояния дросселя РККБР, и может быть активирован СИН.
Таким образом, может быть выполнен алгоритм, запущенный оператором, для определения того, происходит ли ухудшение состояния РККБР в связи с ухудшением состояния датчика положения РККБР или в связи с ухудшением состояния дросселя РККБР. Посредством команды входного напряжения на дроссель РККБР посредством входного воздействия водителя может быть выполнена более точная диагностика. Также ремонт может быть выполнен за более короткий срок при идентификации того, состояние какого из компонентов РККБР ухудшено.
На ФИГ. 6 показан примерный алгоритм 600 для обеспечения того, что изменения ДВД происходят в первую очередь в связи с регулировкой положения дросселя РККБР. Дополнительно, алгоритм 600 может также обеспечивать дополнительный и более надежный способ диагностирования ухудшения состояния дросселя РККБР. В данном случае на дроссель РККБР может быть направлен периодический сигнал, и можно отслеживать соответствующие изменения ДВД для определения ухудшения состояния РККБР.
На шаге 602 диагностика дросселя РККБР может быть проведена посредством направления периодического сигнала на дроссель РККБР и мониторинга изменений ДВД в ответ на изменения положения дросселя РККБР. Периодический сигнал может быть заранее определен и направлен контроллером на основе входного воздействия водителя. Алгоритм 600 может на шаге 604 направить периодический сигнал в форме меандра. Также на шаге 606 алгоритм 600 подразумевает направление периодического сигнала, имеющего периодичность (или период), основанную на времени отклика турбонагнетателя. В одном из примеров периодичность (или период) сигнала в форме меандра может быть меньше динамики турбонагнетателя. Точнее, период периодического сигнала в форме меандра может быть меньше, чем время отклика турбонагнетателя. Таким образом, период сигнала в форме меандра может иметь достаточную продолжительность, чтобы позволить установиться режиму работы турбонагнетателя и системы двигателя после каждого фронта меандра.
Например, если на РККБР дается команда открытия первым фронтом периодического сигнала, и дроссель РККБР переключается в более открытое положение из более закрытого положения, ДВД может сначала уменьшиться. В ответ на уменьшение ДВД регулятор давления наддува может быть отрегулирован контроллером до более закрытого положения для возврата ДВД к целевому значению. Целевое давление может быть давлением наддува, выбранным для имеющихся условий работы двигателя. Изменения ДВД в результате регулировок положения дросселя РККБР могут поэтому быть переходными. Таким образом, сигнал в форме меандра может иметь соответствующий период продолжительности, чтобы обеспечить повторную регулировку ДВД до целевого значения. Следует понимать, что вместо сигнала в форме меандра может быть направлен прямоугольный сигнал в качестве периодического сигнала.
Возвращаясь к алгоритму 600, на шаге 608 может быть определено, соответствуют ли по существу наблюдаемые изменения ДВД периодичности периодического сигнала. Например, можно определить, имеют ли изменения ДВД одинаковую частоту и схему периодов с периодическим сигналом, заданным командой на дроссель РККБР. Следует отметить, что как раскрыто выше, изменения ДВД могут быть переходными так, что ДВД может изначально вырасти (или уменьшиться) в ответ на закрытие (или открытие) дросселя РККБР, но ДВД может позже уменьшиться (или соответствующим образом увеличиться), так как регулятор давления наддува и/или прочие приводы отрегулированы для восстановления ДВД до целевого значения.
Если на шаге 608 определено, что изменения ДВД по существу соответствуют схеме периодов и частоте сигнала, направленного на дроссель РККБР, алгоритм 600 переходит к шагу 610 для определения отсутствия ухудшения состояния дросселя РККБР. По существу, дроссель РККБР переключается согласно команде периодического сигнала, подаваемого контроллером на дроссель РККБР.
Например, форма меандра периодического сигнала может изменять положение дросселя РККБР из полностью открытого в полностью закрытое. Благодаря выбранному периоду сигнала в форме меандра дроссель РККБР может поддерживаться в полностью закрытом или полностью открытом положении в течение достаточно продолжительного периода для обеспечения восстановления ДВД до целевого значения. Поэтому, если дроссель РККБР не заел в открытом (или закрытом) положении, и если он переключается согласно команде периодического сигнала, ДВД может изменяться согласно переключениям дросселя РККБР. Точнее, в одном из примеров, если дроссель РККБР переводится из полностью открытого положения в полностью закрытое положение, ДВД может сначала значительно увеличиться. Затем ДВД может уменьшиться до целевого значения посредством приведения регулятора давления наддува в более открытое положение. Как только целевое давление будет достигнуто, и установится режим работы двигателя и системы турбонагнетателя при заданных условиях, периодический сигнал может перевести дроссель РККБР из полностью закрытого в полностью открытое положение. В ответ на переход значительное уменьшение ДВД может быть измерено сначала датчиком ДВД. Однако такое уменьшение может быть переходным для того, чтобы регулятор давления наддува мог быть отрегулирован до более закрытого положения для возврата ДВД в целевое значение. Таким образом, на каждом фронте заданного командой периодического сигнала ДВД может значительно изменяться, если дроссель РККБР не заело в открытом положении (или закрытом положении). Позднее ДВД может быть восстановлено до заранее установленного целевого значения. В одном из примеров привод, отличный от регулятора давления наддува, может быть отрегулирован для возврата ДВД к целевому значению, например, впускной дроссель и/или фазы газораспределения и/или высота подъема клапана. Однако такие действия могут повлиять на крутящий момент двигателя и потребовать дальнейших контрмер, таких как переключение передач, регулирование момента зажигания и т.д.
По выбору, когда будет установлено, что состояние РККБР не ухудшено на шаге 610, алгоритм 600 может перейти к шагу 612 для индицирования того, что состояние датчика положения РККБР не ухудшено. В данном случае ухудшение состояния датчика положения может быть определено на основе предварительного индицирования ухудшения состояния РККБР, например, на шаге 212 алгоритма 200, или предварительного индицирования ухудшения состояния ДПД, например, на шаге 306 алгоритма 300 и на шаге 510 алгоритма 500. Следует отметить, что предварительные индикации ухудшения состояния РККБР и/или ДПД могут быть основаны на заданном командой изменении положения РККБР, не содержащем команду периодического сигнала. После этого алгоритм 600 может быть завершен.
В другом примере при установлении отсутствия ухудшения состояния РККБР на шаге 610 ухудшение состояния датчика положения РККБР может быть определено, если позднее заданное командой изменение положения РККБР, следующее за определением надежности дросселя РККБР, не обеспечивает соответствующее изменение в отклике датчика положения.
С другой стороны, если подтверждено, что на шаге 608 изменения ДВД по существу не соответствуют схеме периодов и частоте сигнала, направленного на дроссель РККБР, алгоритм 600 переходит к шагу 614 для определения ухудшения состояния дросселя РККБР. В данном случае дроссель РККБР может не переключаться согласно команде периодического сигнала, подаваемого контроллером на дроссель РККБР. Соответственно, дроссель РККБР может заесть в полностью открытом, полностью закрытом или промежуточном положении. На шаге 616 алгоритм 600 по выбору может осуществить индикацию оператору соответствующий диагностический код, указывающий на заедание дросселя РККБР (в открытом или закрытом положении), и может быть активирован СИН.
Таким образом, примерная система может содержать двигатель, турбонагнетатель для подачи наддувочного воздушного заряда на двигатель, турбонагнетатель, содержащий газовую турбину и впускной компрессор, впускной дроссель во впускном канале ниже по потоку от впускного компрессора, регулятор давления наддува, установленный параллельно турбине, рециркуляционный клапан компрессора с бесступенчатой регулировкой (РККБР), установленный параллельно компрессору, РККБР, содержащий дроссель РККБР и датчик положения РККБР, датчик давления на впуске дросселя (ДВД), соединенный с впускным каналом выше по потоку от впускного дросселя и ниже по потоку от впускного компрессора. Примерная система может дополнительно содержать систему управления с машиночитаемыми инструкциями, хранящимися в долговременной памяти, для направления периодического сигнала на РККБР, измерения изменения давления на впуске впускного дросселя посредством датчика ДВД, и если изменение давления на впуске впускного дросселя в ответ на заданный командой периодический сигнал не соответствует частоте заданного командой периодического сигнала - индицирование ухудшения состояния дросселя РККБР. Система управления может содержать дополнительные инструкции для не выполнения индицирования ухудшения состояния дросселя РККБР, если изменение давления на впуске впускного дросселя в ответ на заданный командой периодический сигнал по существу соответствует частоте заданного командой периодического сигнала.
Дополнительно, система управления может содержать дополнительные инструкции для индицирования ухудшения состояния датчика положения РККБР на основе первого определения ухудшения состояния РККБР и изменений давления на впуске впускного дросселя в ответ на заданный командой периодический сигнал, по существу соответствующих частоте заданного командой периодического сигнала. Первое определение ухудшения состояния РККБР может содержать диагностику, например такую, как выполненная на шаге 212 в алгоритме 200. Поэтому первое определение ухудшения состояния РККБР может содержать недостаточные изменения в показаниях датчика положения РККБР в ответ на первое заданное командой изменение положения РККБР (например, на шаге 206 в алгоритме 200), при этом первое заданное командой изменение не совпадает с периодическим сигналом. В качестве альтернативы, первое определение ухудшения состояния РККБР может содержать определение ухудшения состояния датчика ДПД на шаге 510 в алгоритме 500 с последующим подтверждением в алгоритме 600. В данном случае, если алгоритмом 500 определено ухудшение состояния датчика положения, алгоритм 600 может подтвердить диагноз ухудшения состояния ДПД, при котором изменения ДВД по существу соответствуют периодическому сигналу, направляемому на дроссель РККБР. Следует отметить, что в обоих случаях (алгоритма 500 или алгоритма 200) первое заданное командой изменение положения РККБР отличается от команды периодического сигнала. Также первое заданное командой изменение положения может не быть командой периодического сигнала. Периодический сигнал может иметь форму меандра с периодом, основанным на времени отклика турбонагнетателя. В качестве альтернативы, периодический сигнал может иметь прямоугольную форму с периодом, основанным на времени отклика турбонагнетателя. Дополнительно, система управления может содержать дополнительные инструкции для деактивации РККБР и регулировки одного или более из следующих компонентов: регулятор давления наддува, положение впускного дросселя и фазы газораспределения, - при деактивации РККБР в ответ на индицирование ухудшения состояния датчика положения РККБР.
На ФИГ. 7 показан пример сравнения идентификации ухудшения состояния датчика положения РКК с ухудшением состояния дросселя РКК в примерной системе двигателя, такой, как на ФИГ. 1. Схема 700 на ФИГ. 7 показывает ухудшение состояния дросселя РККБР на графике 702, ухудшение состояния датчика положения (ДПД) РККБР на графике 704, показания датчика положения (ДПД) РККБР на графике 708, ДВД, согласно измеренному датчиком ДВД на графике 710, и команду РККБР на графике 712. Все вышеуказанные графики составлены относительно времени по оси х. Также увеличение времени показано слева направо по оси х. Следует отметить, что схема 700 представляет три отдельных определения ухудшения состояния в трех отдельных событиях.
До момента времени t1 РККБР может поддерживаться в полностью открытом положении, как показано командой на РККБР. ДВД, согласно измеренному датчиком ДВД (схема 710), меньше, так как РККБР находится в полностью открытом положении. Также показания ДПД показывают, что дроссель РККБР находится в открытом положении. В момент времени t1 контроллер может дать команду изменения положения РККБР. Как показано в момент времени t1, на РККБР может быть дана команда перехода в полностью закрытое положение из полностью открытого положения, установленного до момента времени t1. Показания ДПД в ответ на команду в момент времени t1 не изменяются, и ДПД продолжает показывать открытое положение РККБР (или дросселя РККБР). Однако между моментами времени t1 и t2 измерено увеличение ДПД, что означает переход положения дросселя РККБР из полностью открытого в полностью закрытое. Соответственно, в момент времени t2 показано ухудшение состояния датчика положения РКК (график 704), в то время как на графике 702 показано отсутствие ухудшения состояния дросселя РККБР. Таким образом, контроллер выполнен с возможностью индицирования ухудшения состояния датчика положения на основе увеличения давления на впуске дросселя в ответ на команду закрытия РККБР и обратную связь от датчика положения, указывающего на открытое положение РККБР.
Между моментами времени t2 и t3 может пройти период времени, в течение которого может быть произведен ремонт или замена датчика положения РКК так, чтобы в момент времени t3 датчик положения надежно функционировал. В момент времени t3 двигатель может работать с РККБР в преимущественно открытом положении согласно команде (график 712). Также ДПД указывает на то, что дроссель РККБР находится в преимущественно открытом положении, и ДВД может быть ниже в момент времени t3 в связи с тем, что РККБР находится в преимущественно открытом положении.
В момент времени t4 на РККБР (и дроссель РККБР) может быть дана команда перехода в полностью закрытое положение. Например, может потребоваться более высокий уровень наддува в связи с увеличением требующегося крутящего момента, в результате чего дается команда перехода РККБР в полностью закрытое положение. Как будет показано, ДВД не будет увеличиваться, как ожидается, если дроссель РККБР закрыт (график 710). В данном случае можно ожидать максимальное ДВД в связи с командой перехода РККБР в полностью закрытое положение. Тем не менее, наблюдаемое увеличение ДВД номинально, в то время как показания ДПД не изменяются и могут показывать, что дроссель РККБР продолжает работу в открытом положении. В одном из примеров ДПД может показывать частично открытое/частично закрытое положение дросселя РККБР, несмотря на то, что соотношение сигнал/шум может быть меньше, когда РККБР заело ближе к требуемому положению. При заедании дальше от требуемого положения ухудшение состояния может быть идентифицировано и индицировано быстрее. Поэтому в момент времени t5 ухудшение состояния дросселя РККБР может быть определено на основе недостатка изменения в отклике датчика положения и по существу на основе отсутствия изменения ДВД в ответ на заданное командой изменение положения дросселя РККБР. Дроссель РККБР может заесть в открытом положении, и наддув не может увеличиться значительно. В ответ на определение заедания дросселя РККБР в открытом положении контроллер может перевести регулятор давления наддува в полностью закрытое положение для обеспечения более высокого уровня наддува.
Между моментами времени t5 и t6 может пройти достаточно времени для ремонта дросселя РККБР, чтобы вывести его из заевшего положения. В момент времени t6 двигатель может работать с РККБР (и дросселем РККБР) в полностью закрытом положении. ДПД указывает на то, что дроссель РККБР находится в закрытом положении, и ДВД имеет большее значение, возможно максимальное, что означает то же самое. В момент времени t7 контроллер может давать команду изменения положения дросселя РККБР из полностью закрытого в полностью открытое. Однако изменение ДВД в ответ на эту команду может отсутствовать (график 710), и показания ДПД (график 708) могут не указывать на изменение положения РККБР.
Таким образом, дроссель РККБР может заесть в закрытом положении. Поэтому в момент времени t8 может быть индицировано ухудшение состояния РККБР, в то время как ДПД показан надежно функционирующим. Таким образом, контроллер выполнен с возможностью индицирования ухудшения состояния дросселя РККБР на основе недостатка изменения давления на впуске дросселя в ответ на команду открытия (или полного открытия) РККБР и обратную связь от датчика положения, указывающего на закрытое положение РККБР.
Таким образом, примерная система может содержать двигатель, турбонагнетатель для подачи наддувочного воздушного заряда на двигатель, турбонагнетатель, содержащий газовую турбину и впускной компрессор, впускной дроссель во впускном канале ниже по потоку от впускного компрессора, регулятор давления наддува, установленный параллельно турбине, рециркуляционный клапан компрессора с бесступенчатой регулировкой (РККБР), установленный параллельно компрессору, РККБР, содержащий дроссель РККБР и датчик положения РККБР, датчик давления на впуске дросселя (ДВД), соединенный с впускным каналом выше по потоку от впускного дросселя и ниже по потоку от впускного компрессора. Примерная система может дополнительно содержать систему управления с машиночитаемыми инструкциями, хранящимися в долговременной памяти, для изменения положения РККБР, определения ухудшения состояния РККБР на основе обратной связи от датчика положения РККБР, указывающего на то, что дроссель РККБР не изменил положение в ответ на воздействие, и при первом условии индицирование ухудшения состояния датчика положения РККБР, а при втором условии индицирование ухудшения состояния дросселя РККБР. Первое условие может содержать ожидаемое изменение давления на впуске дросселя, измеренное датчиком давления на впуске дросселя при воздействии, при этом второе условие может по существу не содержать изменений давления на впуске дросселя, измеренного датчиком давления на впуске дросселя. Система управления может содержать дополнительные инструкции для деактивации РККБР в ответ на определение ухудшения состояния РККБР и для регулировки одного или более из следующих компонентов: регулятора давления наддува, впускного дросселя и фаз газораспределения в ответ на деактивацию РККБР.
Что касается ФИГ. 8, на ней показана схема 800 с примером диагностики дросселя РККБР в примерной системе двигателя, такой, как система 100 двигателя на ФИГ. 1, на основе команды периодического сигнала. Данный пример диагностики с использованием команды периодического сигнала может сократить шум в ДВД от других факторов, например, изменений момента зажигания, положения педали, передачи и т.д.
Схема 800 содержит ухудшение состояния дросселя РККБР на графике 802, ухудшение состояния датчика положения (ДПД) РККБР на графике 804, индицирование ухудшения состояния РККБР (как целого блока) на графике 806, показания датчика положения (ДПД) РККБР на графике 808, ДВД, согласно измеренному датчиком ДВД, на графике 810 и команду РККБР на графике 812. Все вышеуказанные графики составлены относительно времени по оси х. Также увеличение времени показано слева направо по оси х. Линия 811 представляет собой целевое давление на впуске дросселя, при котором может работать двигатель во время определения ухудшения состояния РККБР.
До момента времени t1 пользователь может управлять двигателем в ежедневном режиме, не посещая дилерский центр, сервисный центр, автомастерскую и т.д. Также двигатель может работать с РККБР (и дросселем РККБР) в полностью открытом положении. Данное положение дросселя РККБР указывается ДПД. ДВД можно не отслеживать активно для диагностики РККБР до тех пор, пока не будет индицировано ухудшение состояния РККБР (например, на шаге 212 алгоритма 200). Поэтому ДВД может не быть измерено в ответ на команду РККБР до момента времени t3. В момент времени t1 на РККБР может быть дана команда перехода в полностью закрытое положение. Однако отклик ДПД указывает на то, что изменение положения дросселя РККБР в момент времени t1 в ответ на заданное командой изменение положения дросселя РККБР отсутствует. Соответственно, в момент времени t2 контроллер может индицировать, что вероятно ухудшение состояния РККБР. В одном из примеров это может быть зарегистрировано как первое индицирование ухудшения состояния РККБР.
В ответ на индицирование ухудшения состояния РККБР может быть начато определение ухудшения состояния конкретного компонента РККБР в момент времени t3 посредством входного воздействия водителя в дилерском центре, сервисном центре или автомастерской. Следует отметить, что может пройти период времени между обнаружением ухудшения состояния РККБР в момент времени t2 и диагностикой конкретного компонента в момент времени t3. Например, между моментами времени t2 и t3, в то время как пользователь управляет двигателем, контроллер может попытаться выявить различие между ухудшением состояния дросселя РККБР и датчика положения РККБР (например, посредством алгоритма 300 на ФИГ. 3). В этом примере может быть проведена примерная диагностика, показанная после момента времени t3, для подтверждения предыдущей диагностики вероятного ухудшения состояния.
Между моментами времени t3 и t4 двигатель может работать с ДВД, по существу аналогичным целевому ДВД (линия 811) с РККБР в полностью открытом положении. Таким образом, целевое ДВД с РККБР в полностью открытом положении может быть достигнуто посредством регулировки открытия впускного дросселя, установленного ниже по потоку от впускного компрессора, и/или регулировки открытия регулятора давления наддува.
В момент времени t4 на дроссель РККБР может быть направлен периодический сигнал в форме меандра, как показано на графике 812. Также в ответ на данный периодический сигнал могут наблюдаться изменения ДВД (график 810). Как показано на графике 810, изменения ДВД по существу имеют ту же частоту и схему периодов, что и периодический сигнал, заданный командой на РККБР между моментами времени t4 и t9. Заданный командой периодический сигнал может иметь достаточно небольшой период, обеспечивающий достаточно времени для отклика турбонагнетателя. Также каждое изменение положения дросселя РККБР приводит к изменению ДВД, которое может быть переходным. Точнее, в момент времени t4 периодический сигнал может давать команду перехода РККБР в полностью закрытое положение. Если дроссель РККБР ответит на эту команду (и его состояние не ухудшено) и перейдет в полностью закрытое положение, может наблюдаться значительное увеличение ДВД (выше целевого ДВД линии 811) в момент времени t4 в ответ на переход. Однако, так как целевое ДВД ниже данного повышенного уровня ДВД, регулятор давления наддува может быть переведен в более открытое положение для снижения ДВД. В качестве альтернативы открытие впускного дросселя может быть увеличено для уменьшения ДВД. Соответственно, ДВД снижается до целевого давления (линия 811) в момент времени t5 до того, как периодический сигнал направит команду изменения положения РККБР в момент времени t6. Таким образом, период периодического сигнала может быть достаточным для того, чтобы обеспечить восстановление ДВД до целевого давления, и для поддержки динамики турбонагнетателя.
В момент времени t6 периодический сигнал дает команду изменения положения РККБР с полностью закрытого на полностью открытое. В ответ на эту команду дроссель РККБР может быть отрегулирован до полностью открытого положения (если не ухудшено его состояние), что приведет к значительному падению ДВД в момент времени t6. В ответ на такое падение ДВД регулятор давления наддува может быть отрегулирован до более закрытого положения для увеличения ДВД до целевого значения. В качестве альтернативы впускной дроссель может быть перемещен в более закрытое положение из более открытого положения для увеличения ДВД. Как отмечено, ДВД достигает целевого значения в моменты времени U и t8, периодический сигнал может давать команду изменения положения РККБР с полностью открытого на полностью закрытое. Цикл может повторяться, пока не будет достигнуто достаточное количество переходов. В представленном примере четырех переходов может быть достаточно для определения ухудшения состояния или надежности дросселя РККБР. В показанном примере определена надежность (а не ухудшение состояния) дросселя РККБР, так как изменения ДВД по существу соответствуют частоте и схеме заданного командой периодического сигнала. Поэтому в момент времени t9 контроллер может индицировать, что состояние ДПД ухудшено, в то время как состояние дросселя РККБР индицировано как не ухудшенное. Таким образом, ухудшение состояния ДПД основано на первом определении ухудшения состояния РККБР в момент времени t2 и последующем подтверждении посредством применения периодического сигнала.
Таким образом, примерный способ для двигателя с наддувом может содержать направление периодического сигнала на рециркуляционный клапан компрессора (РКК) и индицирование ухудшения состояния дросселя РКК на основе изменений давления на впуске впускного дросселя в ответ на периодический сигнал. Давление на впуске впускного дросселя может быть измерено датчиком, соединенным с впускным каналом и расположенным выше по потоку от впускного дросселя и ниже по потоку от впускного компрессора двигателя с наддувом, например, датчиком 173 ДВД на ФИГ. 1. Периодический сигнал может быть направлен контроллером двигателя с наддувом на основе входного воздействия водителя. Периодический сигнал может иметь форму меандра и периодичность (или период), основанную на времени отклика турбонагнетателя двигателя с наддувом. Способ может индицировать ухудшение состояния дросселя РКК, когда изменения давления на впуске впускного дросселя не соответствуют по существу периодичности периодического сигнала, направляемого на РКК. С другой стороны, способ может индицировать ухудшение состояния датчика положения РКК, когда изменения давления на впуске впускного дросселя по существу соответствуют периодичности периодического сигнала, и когда второе заданное командой изменение положения дросселя РКК не обеспечивает соответствующее изменение отклика датчика положения. Второе заданное командой изменение может не быть периодическим сигналом. Способ может содержать деактивацию РКК в ответ на индицирование ухудшения состояния датчика положения РКК. Способ может также содержать регулировку одного или более из следующих компонентов: регулятора давления наддува, впускного дросселя и изменяемых фаз кулачкового распределения в ответ на деактивацию РКК. РКК может представлять собой рециркуляционный клапан компрессора с бесступенчатой регулировкой.
В другом примере способ для двигателя с наддувом может подразумевать направление периодического сигнала на рециркуляционный клапан компрессора (РКК) и выявление различия между ухудшением состояния датчика положения РКК и дросселя РКК на основе изменения давления на впуске впускного дросселя в ответ на команду периодического сигнала в форме меандра. Команда периодического сигнала может иметь меньший период, чем время отклика турбонагнетателя двигателя с наддувом, и может быть определено ухудшение состояния дросселя РКК, когда изменение давления на впуске впускного дросселя в ответ на команду периодического сигнала не соответствует по существу периодичности периодического сигнала. Ухудшение состояния датчика положения РКК может быть определено, когда изменения давления на впуске впускного дросселя по существу соответствуют периодичности команды периодического сигнала, направленной на РКК, и когда второе заданное командой изменение положения дросселя РКК не обеспечивает соответствующее изменение отклика датчика положения, при этом второе заданное командой изменение не совпадает с командой периодического сигнала.
Таким образом, можно выявить различие между ухудшением состояния дросселя РКК от ухудшением состояния датчика положения РКК. Ухудшение состояния определенного компонента можно установить посредством мониторинга ДВД и показаний датчика положения РКК в ответ на команду, направленную контроллером на РКК. Таким образом, может отсутствовать необходимость в дополнительных датчиках для определения ухудшения состояния РКК. Также идентификация ухудшения состояния определенных компонентов может быть более точной при направлении команды периодического сигнала на РКК. Соответственно, ремонт РКК может быть проведен с меньшими затратами и за более короткий срок. В целом, техническое обслуживание двигателя может быть более надежным, а затраты более низкими.
Следует отметить, что примеры алгоритмов управления и оценки, представленные в настоящей заявке, могут использоваться с различными конфигурациями систем двигателя и/или автомобиля. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и выполняться посредством системы управления, содержащей контроллер в сочетании с различными датчиками, приводами и другим аппаратным обеспечением двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, где раскрытые действия могут быть выполнены посредством исполнения инструкций в системе, включая различные компоненты аппаратного обеспечения двигателя совместно с электронным контроллером.
Следует понимать, что конфигурации и алгоритмы, раскрытые здесь, носят иллюстративный характер, и что эти конкретные варианты осуществления не следует рассматривать в качестве ограничения, так как возможны многочисленные модификации. Например, вышеизложенная технология может быть применена в двигателях с конфигурацией цилиндров V-6, I-4, I-6, V-12, с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего раскрытия включает в себя все новые и неочевидные сочетания и под-сочетания различных систем и конфигураций, и другие характеристики, функции, и/или свойства, раскрываемые в настоящем документе.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются ли они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ С НАДДУВОМ (ВАРИАНТЫ) | 2015 |
|
RU2687853C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ОБНАРУЖЕНИЯ ДЕФЕКТОВ РЕЦИРКУЛЯЦИОННОГО КЛАПАНА КОМПРЕССОРА | 2015 |
|
RU2711575C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2015 |
|
RU2711433C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ПРЕДОТВРАЩЕНИЯ ПОМПАЖА | 2015 |
|
RU2711802C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОМПАЖА | 2016 |
|
RU2718368C2 |
| СПОСОБ ДИАГНОСТИКИ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2709242C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ НАДДУВА | 2016 |
|
RU2696155C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДИАГНОСТИКИ ДАТЧИКА СОДЕРЖАНИЯ КИСЛОРОДА В ПРИТОЧНОМ ВОЗДУХЕ ПО ДАВЛЕНИЮ | 2015 |
|
RU2710328C2 |
| СПОСОБ ДИАГНОСТИКИ (ВАРИАНТЫ) И СИСТЕМА ДИАГНОСТИКИ | 2015 |
|
RU2712509C2 |
| ОБЩИЙ ЗАПОРНЫЙ КЛАПАН ДЛЯ ВАКУУМНОГО ПРИВОДА ПРИ НИЗКИХ НАГРУЗКАХ ДВИГАТЕЛЯ И ВАКУУМА ПРОДУВКИ ТОПЛИВНЫХ ПАРОВ ПРИ ФОРСИРОВАНИИ ДВИГАТЕЛЯ | 2015 |
|
RU2701247C2 |
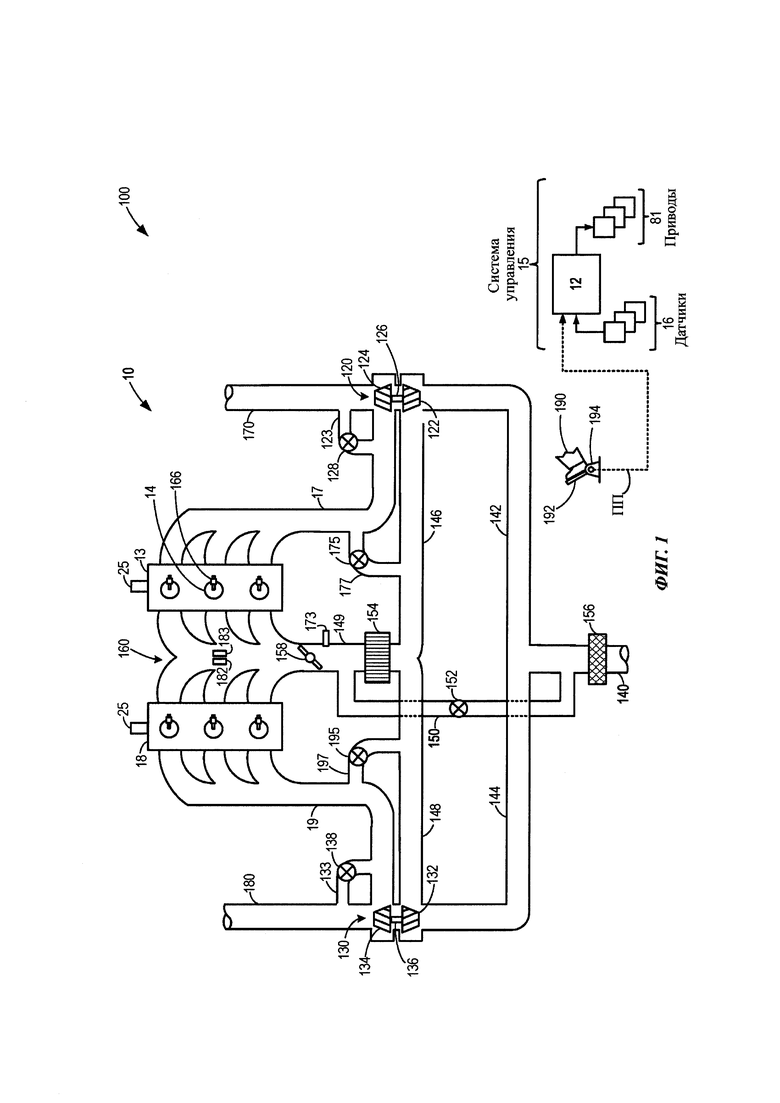
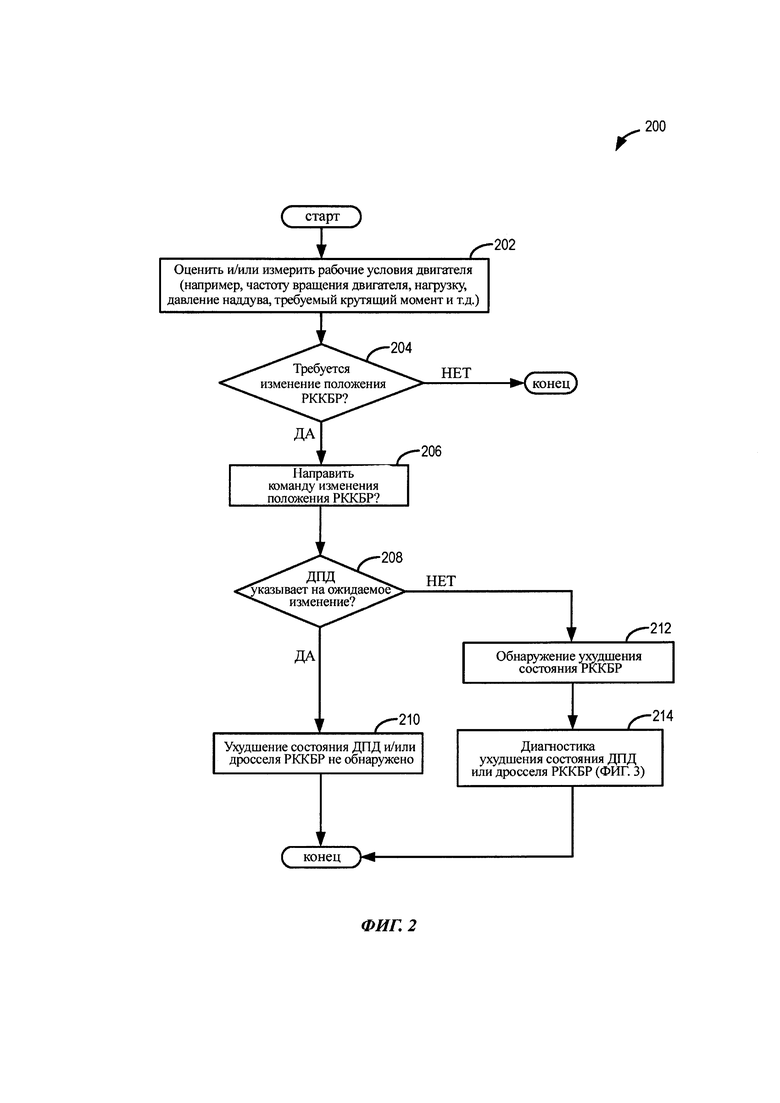
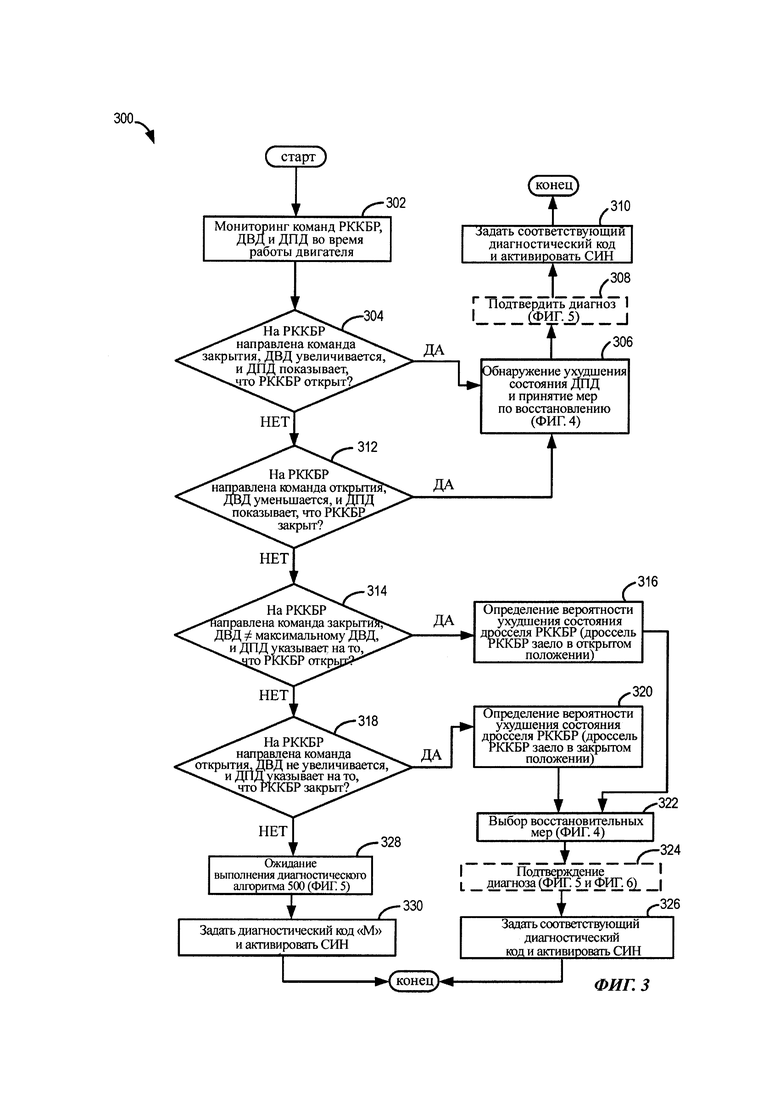
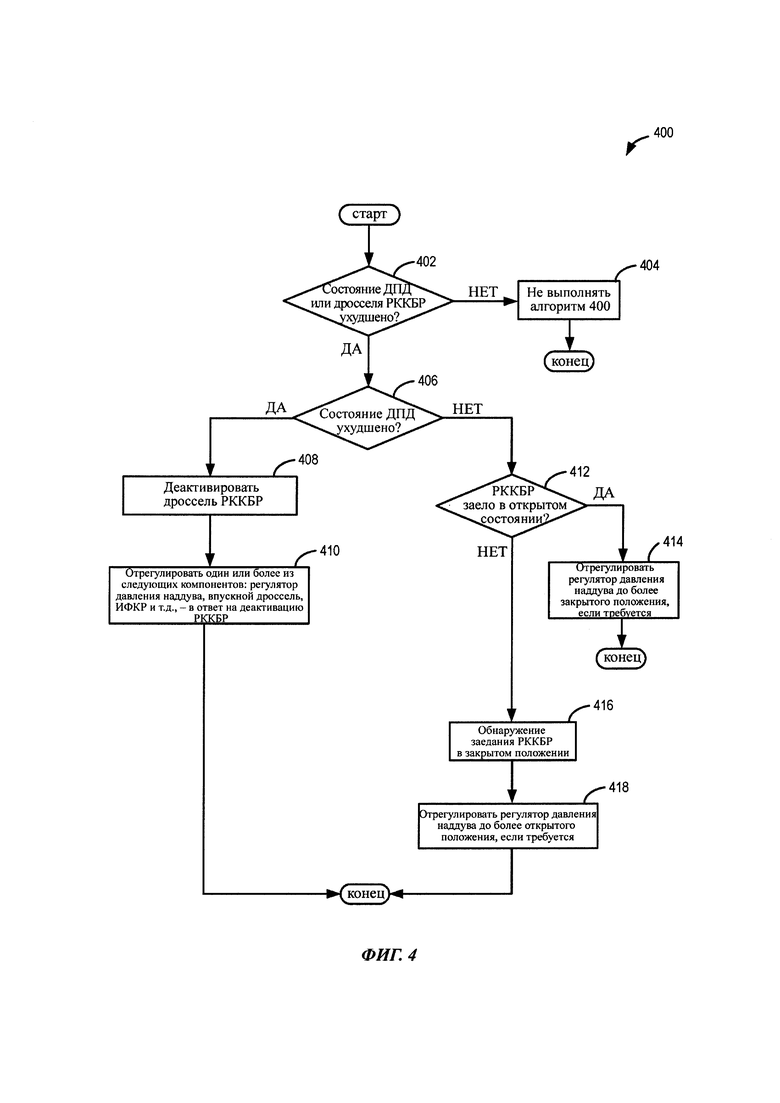
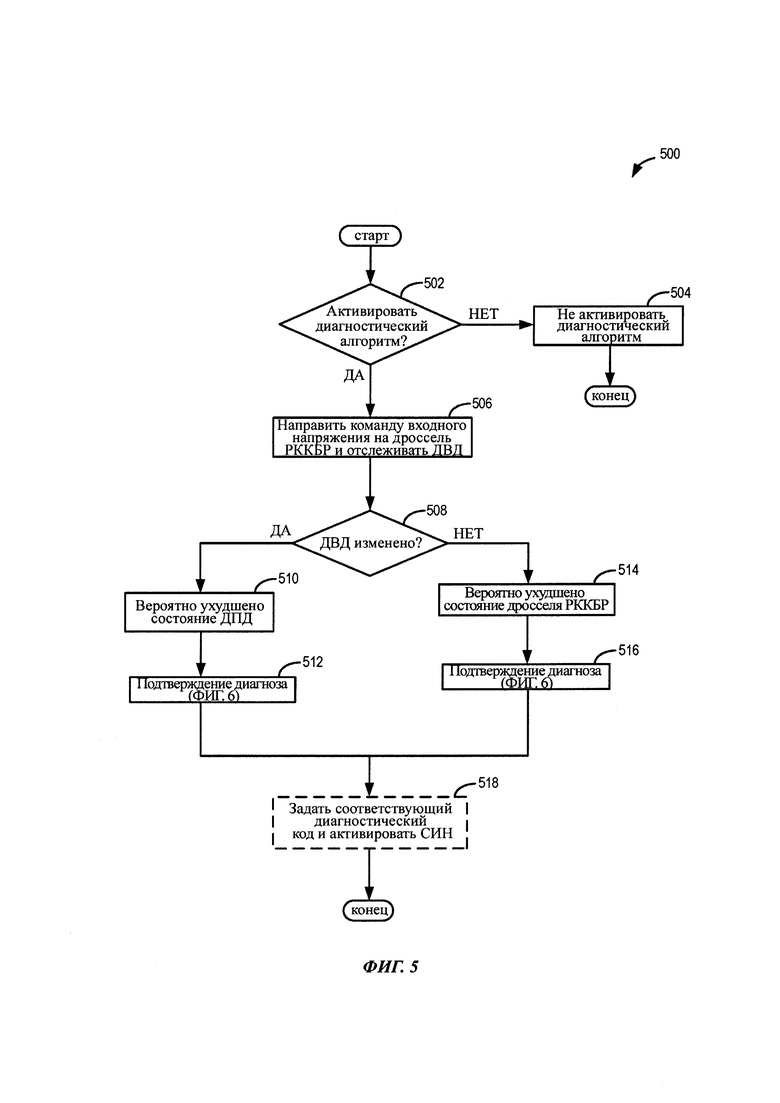

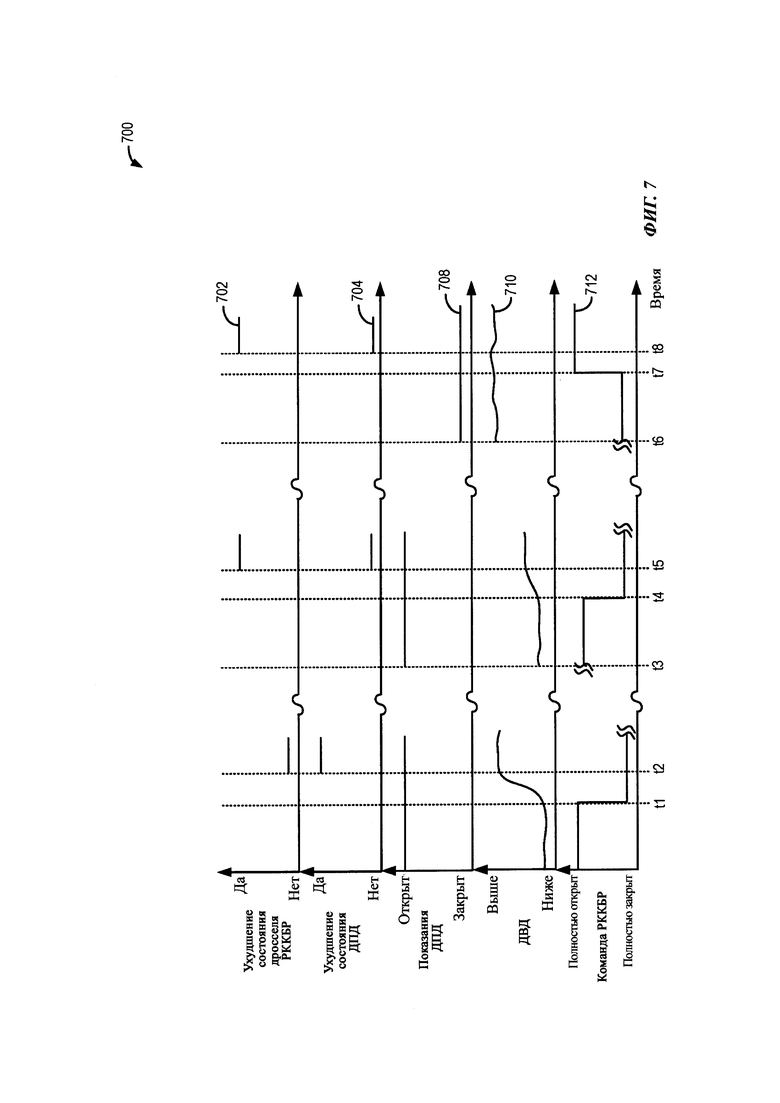
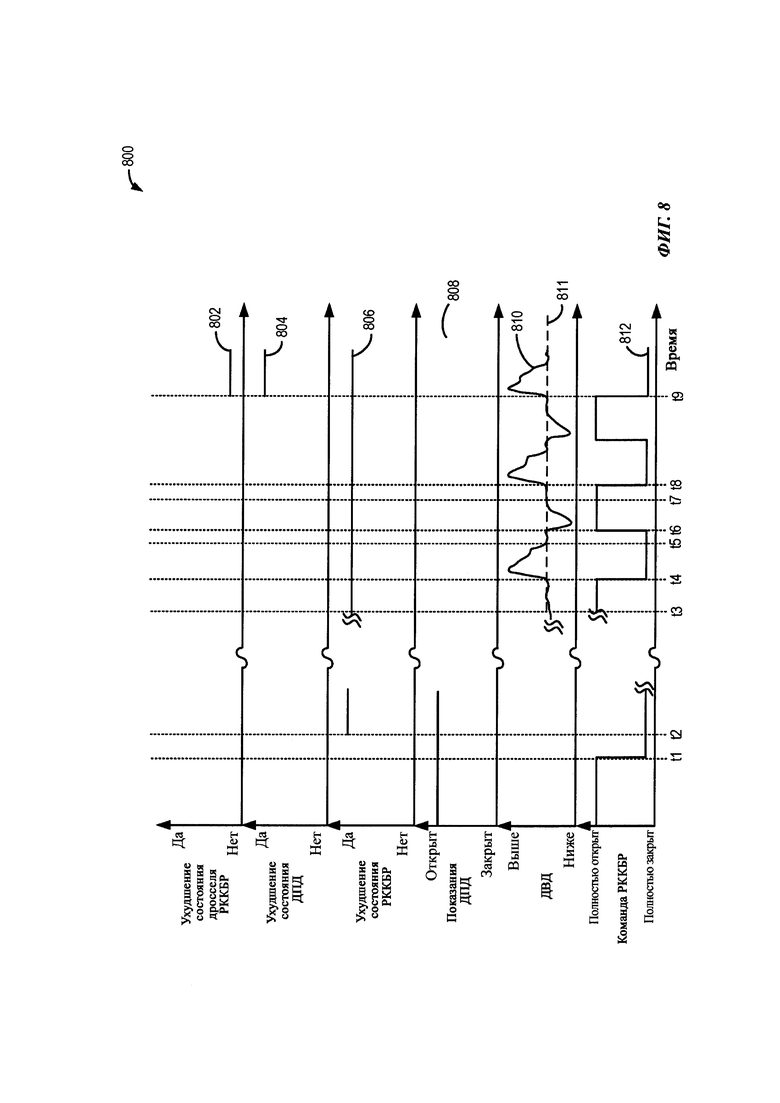
Изобретение может быть использовано в двигателях внутреннего сгорания с наддувом. Способ для двигателя (10) с наддувом заключается в том, что направляют периодический сигнал на рециркуляционный клапан (РКК) (152) компрессора (122), (132). Индицируют ухудшения состояния дросселя рециркуляционного клапана (152) на основе изменений давления на впуске впускного дросселя (158) в ответ на периодический сигнал. Раскрыты вариант способ для двигателя с наддувом и система двигателя. Технический результат заключается в более надежном выявлении ухудшения состояния рециркуляционного клапана. 3 н. и 17 з.п. ф-лы, 8 ил.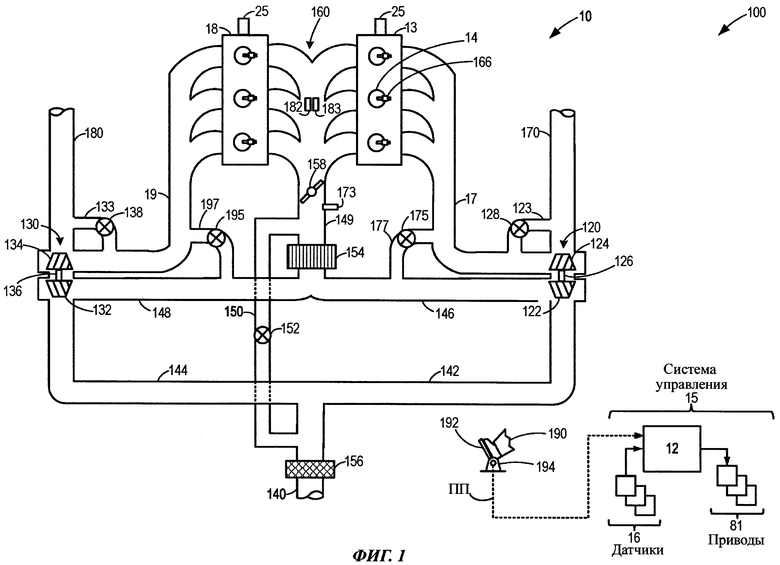
1. Способ для двигателя с наддувом, содержащий:
направление периодического сигнала на рециркуляционный клапан компрессора (РКК); и
индицирование ухудшения состояния дросселя РКК на основе изменений давления на впуске впускного дросселя в ответ на периодический сигнал.
2. Способ по п. 1, отличающийся тем, что давление на впуске впускного дросселя измеряют датчиком, соединенным с впускным каналом и расположенным выше по потоку от впускного дросселя и ниже по потоку от впускного компрессора двигателя с наддувом.
3. Способ по п. 2, отличающийся тем, что периодический сигнал направляют контроллером двигателя с наддувом на основе входного воздействия водителя.
4. Способ по п. 3, отличающийся тем, что периодический сигнал имеет форму меандра.
5. Способ по п. 2, отличающийся тем, что периодический сигнал имеет периодичность, основанную на времени отклика турбонагнетателя двигателя с наддувом.
6. Способ по п. 5, дополнительно содержащий индицирование ухудшения состояния дросселя РКК, когда изменения давления на впуске впускного дросселя не соответствуют по существу периодичности периодического сигнала, направляемого на РКК.
7. Способ по п. 5, дополнительно содержащий индицирование ухудшения состояния датчика положения РКК, когда изменения давления на впуске впускного дросселя по существу соответствуют периодичности периодического сигнала, и когда второе заданное командой изменение положения дросселя РКК не обеспечивает соответствующее изменение отклика датчика положения.
8. Способ по п. 7, отличающийся тем, что второе задаваемое командой изменение не является периодическим сигналом.
9. Способ по п. 7, дополнительно содержащий деактивацию РКК в ответ на индицирование ухудшения состояния датчика положения РКК.
10. Способ по п. 9, дополнительно содержащий регулировку одного или более из следующих компонентов: регулятора давления наддува, впускного дросселя и изменяемых фаз кулачкового распределения, - в ответ на деактивацию РКК.
11. Способ по п. 1, отличающийся тем, что РКК представляет собой рециркуляционный клапан компрессора с бесступенчатой регулировкой (РККБР).
12. Система двигателя, содержащая:
двигатель;
турбонагнетатель для подачи наддувочного воздушного заряда в двигатель, причем турбонагнетатель содержит газовую турбину и впускной компрессор;
впускной дроссель, установленный во впускном канале ниже по потоку от впускного компрессора;
регулятор давления наддува, установленный параллельно газовой турбине;
рециркуляционный клапан компрессора с бесступенчатой регулировкой (РККБР), установленный параллельно впускному компрессору, при этом РККБР содержит дроссель РККБР и датчик положения РККБР;
датчик давления на впуске дросселя (ДВД), соединенный с впускным каналом выше по потоку от впускного дросселя и ниже по потоку от впускного компрессора; и
систему управления с машиночитаемыми инструкциями, хранимыми в долговременной памяти, для:
направления периодического сигнала на РККБР;
измерения изменений давления на впуске впускного дросселя посредством датчика ДВД; и
если изменения давления на впуске впускного дросселя в ответ на задаваемый командой периодический сигнал не соответствуют частоте задаваемого командой периодического сигнала, индицирования ухудшения состояния дросселя РККБР.
13. Система по п. 12, отличающаяся тем, что система управления содержит дополнительные инструкции для не выполнения индицирования ухудшения состояния дросселя РККБР, если изменения давления на впуске впускного дросселя в ответ на заданный командой периодический сигнал по существу соответствуют частоте заданного командой периодического сигнала.
14. Система по п. 13, отличающаяся тем, что система управления содержит дополнительные инструкции для индицирования ухудшения состояния датчика положения РККБР на основе первого определения ухудшения состояния РККБР и изменений давления на впуске впускного дросселя в ответ на заданный командой периодический сигнал, по существу соответствующих частоте заданного командой периодического сигнала.
15. Система по п. 14, отличающаяся тем, что первое определение ухудшения состояния РККБР содержит недостаток изменений в показаниях датчика положения РККБР в ответ на первое заданное командой изменение положения РККБР, при этом первое заданное командой изменение не совпадает с периодическим сигналом.
16. Система по п. 15, отличающаяся тем, что периодический сигнал имеет форму меандра с периодом, основанным на времени отклика турбонагнетателя.
17. Система по п. 16, отличающаяся тем, что система управления содержит дополнительные инструкции для деактивации РККБР и регулировки одного или более из следующих компонентов: регулятора давления наддува, положения впускного дросселя и фаз газораспределения, - в ответ на деактивацию РККБР.
18. Способ для двигателя с наддувом, содержащий:
направление команды периодического сигнала на рециркуляционный клапан компрессора (РКК), имеющего форму меандра; и
выявление различия между ухудшением состояния датчика положения РКК и дросселя РКК на основе изменений давления на впуске впускного дросселя в ответ на команду периодического сигнала в форме меандра.
19. Способ по п. 18, отличающийся тем, что команда периодического сигнала имеет меньший период, чем время отклика турбонагнетателя двигателя с наддувом, и причем ухудшение состояния дросселя РКК определяют, когда изменения давления на впуске впускного дросселя в ответ на команду периодического сигнала не соответствуют по существу периодичности периодического сигнала.
20. Способ по п. 19, отличающийся тем, что ухудшение состояния датчика положения РКК определяют, когда изменения давления на впуске впускного дросселя по существу соответствуют периодичности команды периодического сигнала, направляемого на РКК, и когда второе заданное командой изменение положения дросселя РКК не обеспечивает соответствующее изменение отклика датчика положения, при этом второе заданное командой изменение не совпадает с командой периодического сигнала.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| RU 2012147627 A, 20.05.2014 | |||
| Устройство для изготовления оболочковых стержней | 1961 |
|
SU145314A1 |
| Приставное к прессу устройство для механизированного выноса из зоны штампа листовых изделий | 1959 |
|
SU129174A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

