ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к системам управления технологическими процессами, включающим клапаны, и, в частности, к способам управления клапанами.
УРОВЕНЬ ТЕХНИКИ
Системы управления технологическими процессами, подобные тем, что применяют в химических, нефтеперерабатывающих и других технологических процессах, обычно включают трубы, прохождение потока жидкости или газа по которым регулируют посредством открывания или закрывания клапанов. Клапаны управляются одним или большим количеством технологических контроллеров, коммуникативно соединенных с одним или большим количеством полевых устройств посредством каналов передачи аналоговых, цифровых или комбинированных аналоговых и цифровых сигналов, называемых шинами. Полевыми устройствами могут быть, например, позиционеры клапанов, переключатели и передатчики (например, передатчики информации от датчиков температуры, давления, уровня текучей среды, расхода и положения штока клапана). Полевые устройства расположены в окружающей среде технологической установки и выполняют технологические функции, такие как открывание или закрывание клапанов, измерение технологических параметров, сбор диагностических данных и т.п.
Технологические контроллеры, которые могут быть расположены или не расположены в окружающей среде технологической установки, принимают сигналы, представляющие технологические измерения, выполненные полевыми устройствами, и/или другую информацию, имеющую отношение к полевым устройствам. Один или более технологических контроллеров могут выполнять приложение для контроллера, приводящее в действие, например, различные модули управления, которые: (a) принимают решения об управлении технологическим процессом, (b) генерируют сигналы управления на основании полученной информации и/или (c) координируют свои действия с модулями управления, представленными процессорами, расположенными в полевых устройствах. Модули управления в контроллере посылают управляющие сигналы по каналам передачи данных к полевым устройствам с тем, чтобы таким образом управлять ходом технологического процесса.
Информация от полевых устройств и контроллера обычно доступна через канал передачи данных одному или большему количеству других аппаратных или программных устройств, таких как рабочие станции операторов, персональные компьютеры, архивные хранилища, генераторы отчетов, централизованные базы данных и т.п., которые обычно расположены в пунктах управления или других местах, находящихся вдали от более неблагоприятных производственных условий. Эти аппаратные устройства выполняют приложения, которые могут, например, позволить оператору выполнять функции в отношении технологического процесса, такие как изменение настроек программы управления технологическим процессом, изменение работы модулей управления в контроллере или полевых устройствах, наблюдение за текущим состоянием технологического процесса, наблюдение за предупредительными сигналами, подаваемыми полевыми устройствами и контроллерами, моделирование управления процессом в целях обучения персонала, тестирование программного обеспечения управления технологическим процессом, ведение и обновление базы данных конфигурации и т.п., а также тестирование или сбор данных о любых устройствах системы управления технологическим процессом, таких как любой тип клапана, используемый в системе управления технологическим процессом.
Клапан, используемый в системе управления технологическим процессом, обычно содержит в качестве компонентов седло клапана и закрывающий элемент клапана, который взаимодействует с седлом клапана для закрытия клапана. При надлежащем взаимодействии этих компонентов имеется соответствующее уплотнение клапана, и клапан имеет удовлетворительную целостность седла клапана. При неоднократном использовании в работе системы управления технологическим процессом компоненты клапана могут повреждаться вследствие нормального износа, эрозии, коррозии и т.п.
Традиционные интеллектуальные позиционеры клапанов быстро насыщают сервопривод на основании сигнала команды, пересекающего порог закрытия, который вызывает нежелательное срабатывание клапана, особенно на крупных приводах с объемными бустерами. В случае крупных клапанов перемещение штока может значительно отставать от уставки сервопривода, особенно при отслеживании линейных сигналов с насыщением. При попадании уставки сервопривода в порог закрытия, микроконтроллер и/или позиционер клапана обходит управление с обратной связью и подает сигнал ток-давление (current-to-pneumatic, I/P) для полного насыщения пневматики. Закрытия основаны на сигнале уставки сервопривода, пересекающего заданный порог, который обычно установлен на 0,5% и/или 99,5%. Несмотря на то, что полностью насыщенный I/P привод является желательным состоянием, поддерживающим полную нагрузку седла при наличии отклонений калибровки, для крупных клапанов или клапанов, работающих под высоким давлением, это может привести к сильному удару стержня клапана или поршня привода об ограничитель перемещения, вызывающему нарушения технологического процесса или повреждения компонентов.
Механизм замедления срабатывания клапана при его достижении конечной точки может обычно включать пневмо-механический демпфер и/или электронный плавный останов. К сожалению, каждый из этих потенциальных вариантов осуществления содержит одни или большее количество недостатков. Пневмо-механический демпфер захватывает воздух между поршнем привода и крышкой цилиндра. Одним словом, пневмо-механический демпфер блокирует поток воздуха в направлении выпуска, повышает давление в цилиндре и замедляет срабатывание клапана. Для быстрого заполнения цилиндра и распределения воздуха по поршню могут потребоваться дополнительные контрольные клапаны в крышке цилиндра и канавки поверхности поршня. Кроме того, пневмо-механический демпфер доступен не для всех конструкций привода, и он не может быть модифицирован в процессе эксплуатации. В случае крупных клапанов с тяжелыми движущимися деталями (например, стержнем, штоком и поршнем привода) повышение давления в цилиндре может привести к разрыву кольцевых уплотнений пневматического демпфера. Кроме того, пневмо-механический демпфер, как правило, взаимодействует вблизи физических границ хода цилиндра, оказывая воздействие на расстоянии около 3% и 97% расчетного хода клапана. Динамика привода значительно изменяется вблизи этих областей, что делает проблематичным дроссельное регулирование в пределах 3% области. Наконец, так как пневмо-механический демпфер создает помехи для регистрации давления в цилиндре на позиционере, точность диагностических испытаний клапана вблизи конечных точек хода снижается.
Электронный плавный останов способен решить многие из этих проблем, связанных с пневмо-механическими демпферами. Однако электронный плавный останов не переводит плавно клапан в жесткий останов и не может быть использован для получения полезной диагностики седла клапана. Более того, электронный плавный останов включает несколько точек разрыва с конечным скачком, что может приводить к появлению вибрации или иному нежелательному поведению при работе контроллера технологического процесса вблизи порога электронного плавного останова, что может привести к непредсказуемому реагированию. По существу, электронный плавный останов чувствителен к погрешностям калибровки хода, что может привести к слишком раннему или слишком позднему осуществлению электронного плавного останова при динамическом реагировании.
Следовательно, существует необходимость в обеспечении управляемого насыщения I/P привода с плавным непрерывным переходом сигнала уставки от порога закрытия к насыщенному состоянию. Управление клапаном с такой возможностью позволяет устранить чувствительность к погрешностям калибровки хода, заклинивание или зажатие клапанов и вибрацию при работе контроллера технологического процесса вблизи жесткого останова.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу управления клапаном. Способ включает обеспечение посредством одного или более процессоров первого порога закрытия и второго порога закрытия; мониторинг посредством одного или более процессоров уставки сервопривода; инициирование посредством одного или более процессоров первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и инициирование посредством одного или более процессоров второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
В другом варианте осуществления изобретения система управления клапаном содержит один или более процессоров, соединенных с памятью, и один или более модулей, хранящихся в памяти, причем выполнение одного или более модулей одним или большим количеством процессоров заставляет систему выполнять следующие функции: обеспечение первого порога закрытия и второго порога закрытия; мониторинг уставки сервопривода; возбуждение первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и возбуждение второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
В другом варианте осуществления изобретения материальный энергонезависимый машиночитаемый носитель содержит команды, хранящиеся на нем для управления клапаном, причем эти команды при их выполнении одним или большим количеством процессоров компьютерной системы заставляют один или более процессоров выполнять следующие функции: обеспечение первого порога закрытия и второго порога закрытия; мониторинг уставки сервопривода; возбуждение первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и возбуждение второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
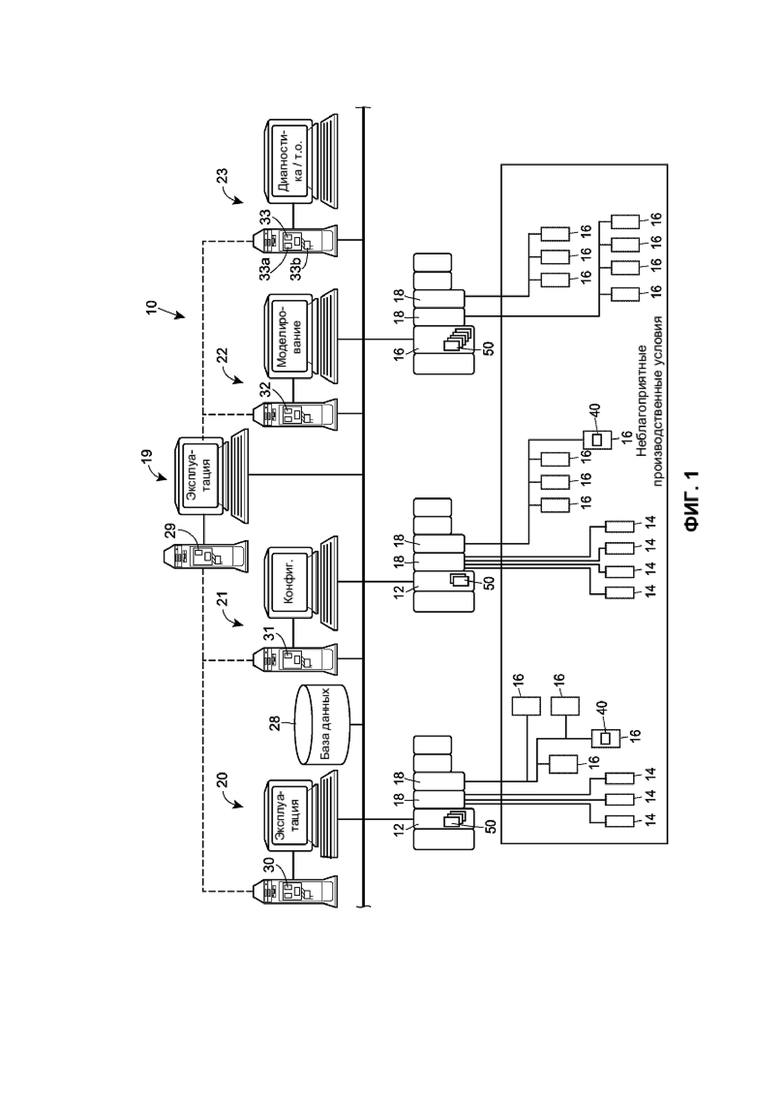
Фиг. 1 изображает блок-схему системы управления технологическим процессом, расположенной в пределах технологической установки, которая может управлять клапаном во время нормальных технологических операций;
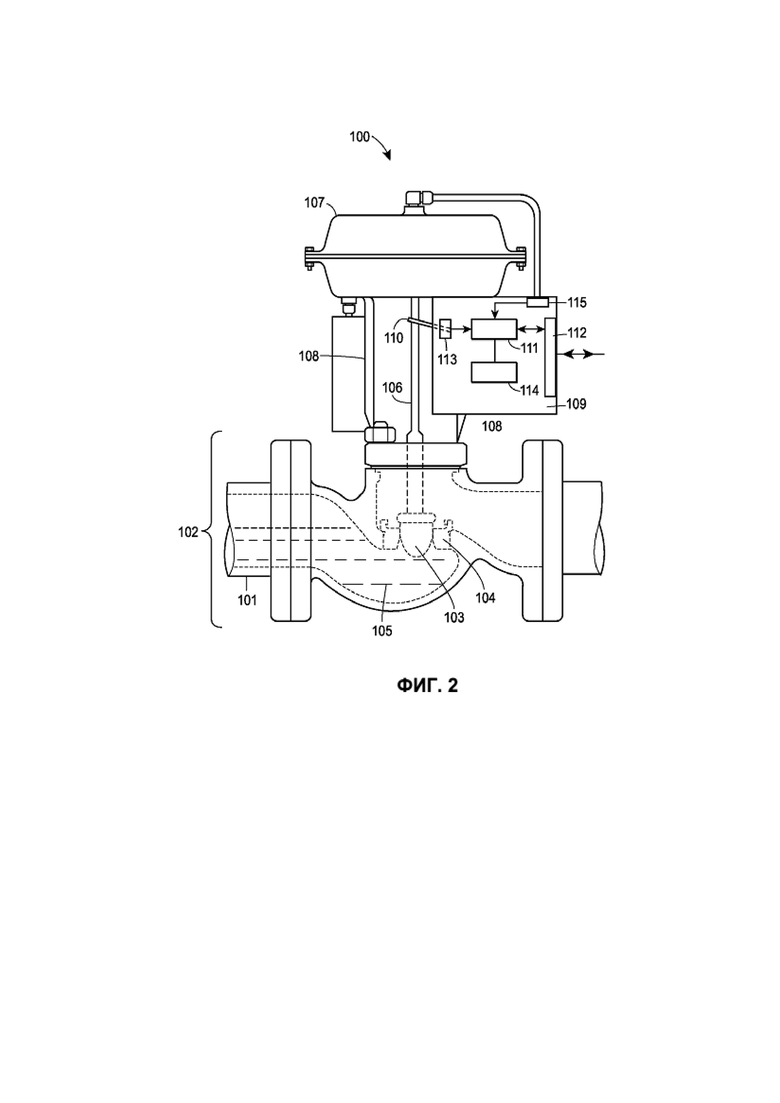
Фиг. 2 изображает вид сбоку клапана управления и сопутствующего оборудования для использования с системой управления технологическим процессом, представленной на фиг. 1, в котором осуществлено мягкое закрытие в соответствии с примером настоящего изобретения;
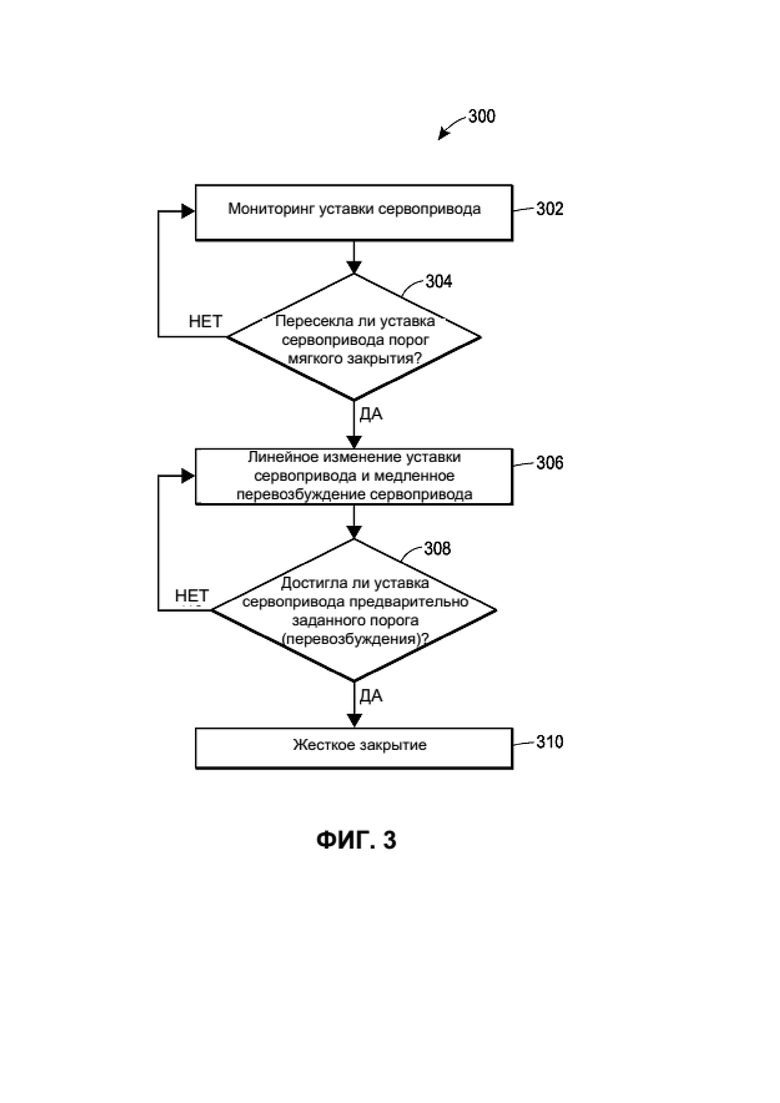
Фиг. 3 изображает структурную схему, представляющую пример способа управления клапаном в соответствии с настоящим изобретением; и
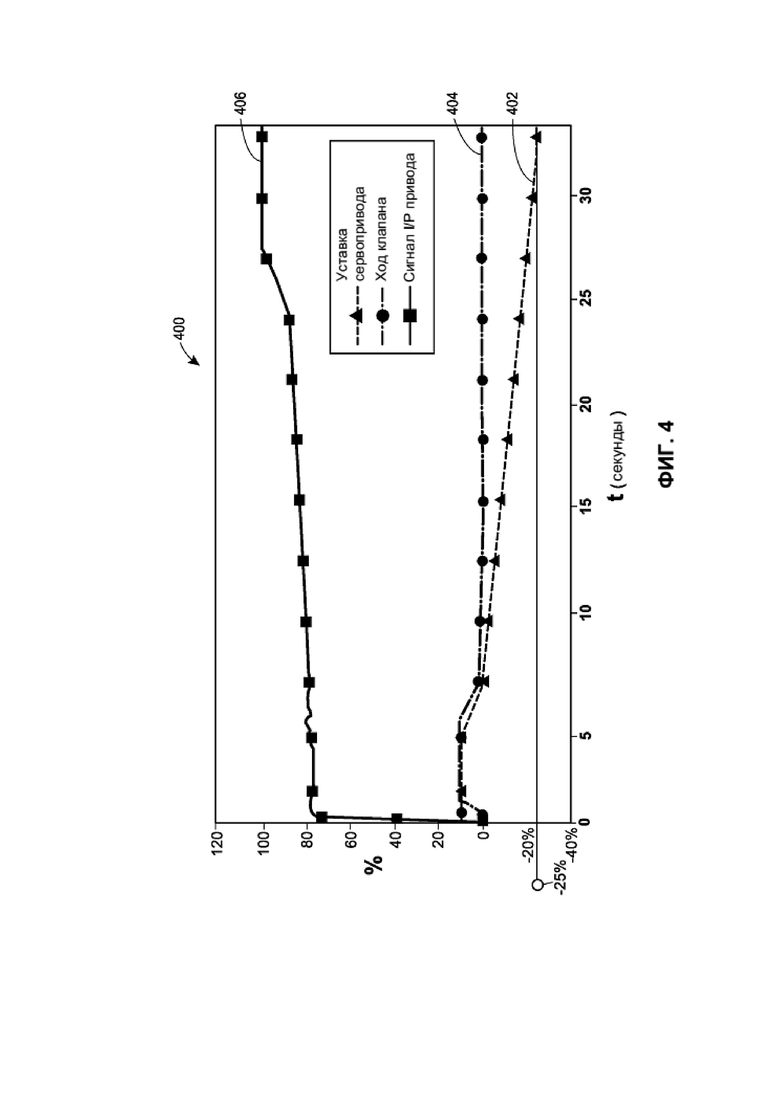
Фиг. 4 изображает графическое представление иллюстративного срабатывания клапана управления на мягкое закрытие.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является снижение и/или устранение внезапного перемещения клапана, вызванного активацией закрытия позиционером клапана. В целом, реализованы два порога закрытия, причем, когда уставка сервопривода пересекает первый порог закрытия, контроллер (например, процессор, микропроцессор, микроконтроллер) линейно изменяет уставку сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок, медленно перевозбуждая сервопривод. Как только уставка сервопривода достигает предварительно заданного второго порога закрытия, контроллер немедленно насыщает сигнал I/P привода. В частности, переходный линейный сигнал с насыщением используют между моментом, когда уставка сервопривода оказывается в пределах первого порога закрытия, например, порога мягкого закрытия, и моментом, когда уставка сервопривода оказывается в пределах второго порога закрытия, например, порога жесткого закрытия, когда происходит полное насыщение I/P привода. Иными словами, когда уставка сервопривода попадает в пределы первого порога закрытия, процессор медленно линейно изменяет уставку сервопривода за пределами диапазона дросселирования до достижения порога жесткого закрытия. Это медленно перевозбуждает сервоконтроллер, управляемый по замкнутому контуру. Когда клапан постепенно приходит к жесткому останову, сервоконтроллер разрывает контур, и в этот момент пневматика насыщается.
В дополнение к улучшению неустановившихся параметром жесткого останова может быть использован плавный непрерывный сигнал уставки для проведения диагностики прилегания к седлу в процессе эксплуатации. В настоящее время автономные испытания динамического сканирования проводят от -5% до 105% без закрытий и определения характеристик. Причина этого заключается в том, что неустановившиеся параметры закрытия слишком быстро меняются, что выдает данные о минимальной длине хода при останове и вносит искажения в данные измерений давления привода от воздействия скорости на датчики давления. За счет перехода в седло клапана без точек разрыва с конечным скачком в уставке могут быть собраны более точные и полезные данные о профиле седла, когда устройство находится в эксплуатации.
На фиг. 1 изображен пример технологической установки 10, включающей различные функциональные области, каждая из которых может быть снабжена вариантом осуществления способа управления клапаном в соответствии с настоящим изобретением. Технологическая установка 10 содержит распределенную систему управления технологическим процессом, имеющую один или более контроллеров 12, каждый из которых соединен с одним или большим количеством полевых устройств 14 или 16 посредством устройств или плат 18 ввода/вывода (input/output, I/O). Кроме того, контроллеры 12 соединены с главными или операторскими рабочими станциями 19-23 посредством магистральной шины 25 передачи данных. База 28 данных соединена с магистральной шиной 25 передачи данных и работает в качестве архивного хранилища для сбора и хранения данных о параметрах, статусе и прочих данных, связанных с контроллерами и полевыми устройствами в пределах установки 10, и/или в качестве базы данных архивного хранилища, в которой хранятся текущие или предшествующие данные испытаний установки 10, загруженные из контроллеров 12 и/или полевых устройств 14 и 16 или хранящиеся в них. База 28 данных может дополнительно хранить графические объекты для создания различных графических представлений технологической установки 10. Вариант осуществления системы управления клапаном, описанной в настоящей заявке, может быть сохранен в качестве программы как одно или большее количество программных приложений 29-33 на соответствующей одной или большем количестве главных или операторских рабочих станций 19-23. В альтернативном или дополнительном варианте осуществления изобретения способ автоматического испытания целостности седла, описанный в настоящей заявке, может храниться в контроллере 12 (например, программном приложении 50) и/или на запоминающем устройстве 114 позиционера 109, представленного на фиг. 2.
Полевые устройства 14 и 16 могут быть расположены в неблагоприятной окружающей среде технологической установки, тогда как контроллеры 12, платы 18 ввода/вывода, рабочие станции 19-23 операторов и база 28 данных могут быть расположены в пунктах управления или в других менее неблагоприятных производственных условиях, которые более легко достижимы за счет технического обслуживания и различного прочего персонала технологической установки. В некоторых случаях персонал технологической установки может использовать мобильные, беспроводные, карманные устройства для обеспечения доступа к информации, выработанной вариантами осуществления системы и/или способа управления клапаном, описанными в настоящей заявке.
Способ испытания целостности седла клапана, описанный в настоящей заявке, может быть включен в различные типы систем управления. Система управления может представлять собой независимую систему управления или распределенную систему управления. Распределенная система управления содержит элементы контроллера, которые не занимают центральное место, а распределены по всей системе, причем каждая подсистема управляется одним или большим количеством распределенных контроллеров. Иллюстративная распределенная система управления, изображенная на фиг. 1, содержит клапан, показанный на фиг. 2, как часть подсистемы работы общей системы управления технологическим процессом, причем контроллер 12 системы управляет клапаном 102, показанным на фиг. 2. Например, либо аналоговое полевое устройство 14, либо цифровое полевое устройство 16 могут представлять позиционер 109 системы управления клапаном, показанный на фиг. 2. В альтернативном варианте осуществления изобретения способ управления клапаном, описанный в настоящей заявке, может быть интегрирован в систему управления клапаном, которая может быть осуществлена полностью самим клапаном, такую как система управления клапаном, представленная на фиг. 2.
На фиг. 2 изображен вариант осуществления системы 100 управления клапаном, соединенной с трубой 101 технологической установки, такой как технологическая установка 10, показанная на фиг. 1. Поток материала 105, проходящий через трубу 101, управляется клапаном 102 управления, содержащим запирающий элемент 103 клапана, соединенный со стержнем 106 или штоком клапана, и седло 104 клапана. Материал 105 может быть жидкостью или газом. Стержень 106 клапана перемещает запирающий элемент 103 вверх или вниз для открывания или закрывания клапана 102 управления. Клапан 102 закрывают и/или открывают за счет усилия, производимого приводом 107 клапана, таким как пневматический привод. Привод 107 соединен с корпусом клапана 102 посредством вилки 108. Позиционер 109, такой как интеллектуальный позиционер, установлен на вилке 108 и используется для детектирования перемещения стержня 106 клапана посредством индикатора 110 перемещения клапана, такого как стержень обратной связи. Индикатор 110 перемещения клапана соединен с датчиком 113 положения клапана, присоединенным к блоку 111 управления клапаном, который может быть процессором, таким как центральный процессорный блок (central processing unit, CPU), или более чем одним процессором. Блок 111 управления получает значение уставки или сигнал управления от интерфейса 112, соединенного с управляющим устройством, таким как рабочие станции 19, 20, 21, 22, 23 или контроллеры 12, представленные на фиг. 1. Например, блок 111 управления может получать уставку или сигнал управления от любого контроллера 12, представленного на фиг. 1. Уставка является задаваемой величиной, которую автоматическая система управления передает устройству, которое она контролирует.
В альтернативном варианте осуществления изобретения индикатор 110 перемещения клапана может быть неприсоединенным устройством обратной связи по положению, которое использует способы соединения и/или мониторинга перемещения стрежня 106 клапана, не имея непосредственного соединения со стержнем 106 клапана. Например, индикатор 110 перемещения может быть электромагнитным индикатором перемещения.
Как отмечено выше, блок 111 управления может принимать уставку от контроллера 12 и затем регулировать клапан 102 управления в соответствии с полученным значением уставки. Значение уставки показывает, насколько сильно клапан должен быть открыт или закрыт. Блок 111 управления вызывает перемещение клапана в соответствии с полученным значением уставки. Блок 111 управления проверяет информацию обратной связи от датчика 113 положения и хранит данные о положении от датчика 113 на запоминающем устройстве 114. Кроме того, позиционер 109 может содержать датчик 115 давления, который в зависимости от типа привода 107 может быть одним или большим количеством датчиков давления. Данные, полученные при помощи датчика 115 давления, могут быть также использованы блоком 111 управления в качестве основания для перемещения клапана 102 в соответствии со значением уставки. Данные о давлении от датчика 115 также могут храниться на запоминающем устройстве 114. Кроме того, как указано выше, часть программного приложения или целиком всё программное приложение способа испытания целостности клапана, описанное в настоящей заявке, может храниться на запоминающем устройстве 114.
Как показано на фиг. 1 и 2, при нормальной работе системы управления технологическим процессом, содержащей клапан 102, этим клапаном управляют при уставке, которая, как отмечено выше, является входным сигналом на блок 111 управления позиционера 109, показанный на фиг. 2. Кроме того, как отмечено выше, уставка задает величину, на которую нужно открыть клапан, и выражена в процентах от полностью открытого клапана. Таким образом, значение уставки в 100% определяет полностью открытый клапан, в котором запирающий элемент 103 клапана смещен на максимальное расстояние от седла 104 клапана; значение уставки в 0% соответствует полностью закрытому клапану, в котором запирающий элемент 103 расположен на седле 104 клапана; и значение уставки по существу между 0% и 100% соответствует частично открытому клапану.
На фиг. 3 изображен один иллюстративный способ 300, имеющий возможность осуществления при помощи системы 100 управления клапаном, представленной на фиг. 2, который снижает и/или устраняет внезапное перемещение клапана, вызванное активацией жесткого закрытия. В целом, задержку насыщения осуществляют перед переходом к регулированию давления, например, регулированию давления в конечной точке (end-point pressure control, EPPC) от дроссельного регулирования (например, управления ходом) клапана. Задержка насыщения обеспечивает достаточное количество времени для выполнения жесткого останова и насыщения перед осуществлением управления давлением в конечной точке; таким образом, предотвращая осуществление жесткого закрытия в середине хода клапана. В одной конфигурации способ 300 использует пару порогов закрытия, например, первый порог закрытия или порог мягкого закрытия и второй порог закрытия или порог жесткого закрытия, для управления позиционером клапана. Осуществляют мониторинг уставки сервопривода относительно порога мягкого закрытия (блок 302). Когда уставка сервопривода пересекает порог мягкого закрытия (блок 304), инициируют мягкое закрытие, и контроллер/процессор медленно перевозбуждает сервопривод (блок 306). Постепенное перевозбуждение сервопривода продолжается до тех пор, пока уставка сервопривода не достигнет предварительно заданного порога перевозбуждения (блок 308), например, второго порога закрытия или порога жесткого закрытия, где сервопривод переходит к этапу жесткого закрытия (блок 310).
На фиг. 4 изображен график 400 иллюстративного срабатывания клапана управления на мягкое закрытие. Уставка 402 сервопривода представлена линией, содержащей сплошные треугольники, ход 404 клапана представлен линией, содержащей сплошные круги, и сигнал 406 I/P привода представлен линией, содержащей сплошные квадраты. Порог мягкого закрытия может быть установлен на 0,5% и 99,5%. В данном примере требуемое перемещение, расположенное выше уставки сервопривода, начинается при 10% и линейно изменяется до 0% со скоростью -4%/сек. За пределами 0,5% порога закрытия уставка сервопривода отслеживает требуемое перемещение. Как только требуемое перемещение опускается ниже 0,5% порога мягкого закрытия, уставка сервопривода переходит к линейному сигналу с насыщением от 0,5% до -25% со скоростью -1%/сек. Как только уставка сервопривода достигает -25%, I/P привод переводят ко второму закрытию, т.е. жесткому закрытию. В данном примере можно увидеть, что I/P привод был полностью насыщен при 100% перед тем, как был достигнут -25% порог уставки для жесткого закрытия. По этой причине переход к полному насыщению при жестком закрытии может считаться безударным.
В качестве альтернативы переходу уставки сервопривода к линейному сигналу с насыщением, когда инициировано мягкое закрытие вблизи порога мягкого закрытия, может быть осуществлена задержка по времени, после окончания которой инициируют жесткое закрытие. Например, после того, как уставка пересекает порог мягкого закрытия, может быть инициирована задержка по времени 10 с, после окончания которой инициируют жесткое закрытие. Еще в одном варианте осуществления изобретения может быть реализовано сочетание линейного сигнала с насыщением и задержки по времени с двумя порогами закрытия. Например, после пересечения уставкой порога мягкого закрытия уставка сервопривода переходит к линейному сигналу с насыщением от 0,5% до -5% со скоростью -1%/сек, и затем осуществляют задержку по времени, когда линейный сигнал с насыщением достигает -5%, после чего может быть инициировано полное насыщение посредством жесткого закрытия.
Как описано выше, преимущества настоящей системы управления клапаном перед традиционными системами управления клапаном включают следующее: регулируемая скорость линейного изменения для постепенного перехода перемещения клапана к механическому останову после того, как сигнал команды пересекает порог закрытия; плавная непрерывная работа сервопривода при работе в режиме закрытия; безударный переход от дроссельного регулирования к полностью насыщенному состоянию при механическом останове, т.е. устранение точек разрыва с конечным скачком, что улучшает диагностику седла; переменная скорость линейного изменения и регулируемые пороги закрытия при любом останове, позволяющие пользователю осуществлять тонкую настройку срабатывания клапана в жесткий останов, устраняя нежелательные неустановившиеся параметры.
Дополнительными преимуществами настоящего перехода к закрытию для позиционера клапана управления перед традиционным переходом к закрытию для позиционера клапана управления может являться то, что настоящий переход к закрытию не требует остановки работы клапана или остановки технологического процесса, использующего клапан, или изоляции клапана во избежание приостановки процесса, или необходимости проведения анализа оператором. От пользователя не требуется вручную выполнять варианты осуществления настоящего перехода к закрытию, описанные в настоящей заявке, а также не требуется вручную интерпретировать результаты этих вариантов осуществления. Таким образом, варианты осуществления настоящего перехода к закрытию, описанные в данной заявке, могут быть выполнены с возможностью лучшего определения того, оказывается ли и когда оказывается целостность седла клапана под вопросом. Кроме того, варианты осуществления настоящего перехода к закрытию, описанные в данной заявке, могут быть выполнены с возможностью лучшего поддержания производительности и уровней безопасности операций, в которых участвует клапан.
Например, клапан может являться частью операции отдельного контура управления, локально управляемой самим позиционером 109 клапана (фиг. 2), или клапан может быть частью операции, задействующей более сложную систему управления технологическим процессом, управляемой контроллером 12 (фиг. 1). В любом случае, настоящие способы перехода к закрытию, описанные в данной заявке, позволяют выполнять переход к закрытию во время нормальной работы по управлению технологическим процессом, в которой задействован клапан, подлежащий испытанию. Нормальная работа технологической установки включает операции, в которых контроллер отправляет сигнал управления к клапану в ответ на операцию управления технологическим процессом по замкнутому контуру программы управления, выполненной с возможностью исполнения контроллером. Кроме того, нормальная работа технологической установки включает операции, в которых контроллер выполнен с возможностью обработки данных о положении в качестве информации обратной связи для использования программой управления по замкнутому контуру, выполненной с возможностью исполнения контроллером.
Следующее описание в первую очередь представлено со ссылкой на объект, изображенный на фиг. 1.
Каждый контроллер 12, который может быть любым типом технологического контроллера или более конкретным типом технологического контроллера, таким как контроллер DeltaVTM компании Emerson Process Management, хранит и выполняет приложение для контроллера, которое осуществляет стратегию управления при помощи любого количества различных независимо выполняемых модулей или блоков 50 управления. Каждый модуль 50 управления может состоять из того, что обычно называют функциональными блоками, где каждый функциональный блок является частью или подпрограммой общей программы управления и работает вместе с другими функциональными блоками (при помощи коммуникаций, называемых связями) для осуществления контуров управления технологическим процессом в рамках технологической установки 10. Функциональные блоки могут быть объектами в протоколе объектно-ориентированного программирования. Функциональные блоки могут выполнять функцию ввода данных, например, связанную с передатчиком, датчиком или другим устройством измерения параметров технологического процесса, или функцию управления, например, связанную с программой управления, которая осуществляет ПИД-управление, управление с использованием нечёткой логики и т.п. Функциональные блоки могут выполнять функцию вывода данных, которая управляет работой некоторых устройств, таких как клапан, для выполнения некоторых физических функций в рамках технологической установки 10. Существуют гибридные и иные типы комплексных функциональных блоков, такие как контроллеры на основе прогнозирующих моделей (model predictive controllers, MPCs), оптимизаторы и т.д. Несмотря на то, что сетевой протокол Fieldbus и протокол системы DeltaV используют модули управления и функциональные блоки, проектируемые и осуществляемые в протоколе объектно-ориентированного программирования, модули управления могут быть спроектированы при помощи любой подходящей схемы программирования управления, включая, например, блок последовательной функции, лестничную логическую схему и т.п., и не ограничены проектированием и осуществлением с использованием функционального блока или какой-либо другой конкретной технологией программирования. Кроме того, каждый из контроллеров 12 поддерживает серию приложений AMS® и может использовать прогнозирующий интеллект для повышения доступности и эффективности производственных мощностей, включая механическое оборудование, электрические системы, технологическое оборудование, инструменты, полевые и интеллектные полевые устройства 14, 16 и клапаны.
В установке 10, изображенной на фиг. 1, полевые устройства 14 и 16, соединенные с контроллерами 12, могут являться стандартными устройствами на 4-20мА или могут быть интеллектуальными полевыми устройствами, такими как полевые устройства HART, Profibus или FOUNDATIONTM, которые содержат процессор и память, или могут являться устройствами любого другого требуемого типа. Некоторые из этих устройств, такие как полевые устройства Fieldbus (имеющие ссылочную позицию 16 на фиг. 1), могут хранить и выполнять модули или подмодули, такие как функциональные блоки, связанные со стратегией управления, осуществляемой в контроллерах 12. Функциональные блоки 40, показанные на фиг. 1 как расположенные в двух разных полевых устройствах 16 Fieldbus, могут быть выполнены вместе с выполнением модулей 50 управления в контроллерах 12 для осуществления управления технологическим процессом, что хорошо известно. Конечно, полевые устройства 14 и 16 могут быть устройствами любого типа, такими как датчики, клапаны, передатчики, позиционеры и т.п., а устройства 18 ввода/вывода могут быть устройствами ввода/вывода любого типа, соответствующими необходимому протоколу передачи данных или протоколу контроллера, такому как HART, Fieldbus, Profibus и т.д.
В технологической установке 10, представленной на фиг. 1, рабочие станции 19-23 могут содержать различные приложения, используемые для различных функций, выполняемых тем же или другим персоналом в рамках установки 10. Каждая рабочая станция 19-23 содержит память, которая хранит различные приложения, программы, структуры данных и т.д., и процессор, который может быть использован для выполнения любого из приложений, хранящихся в памяти, такого как стандартная программа, включающая все или какую-либо часть систем и/или способов испытания целостности седла, описанных в настоящей заявке.
Рабочие станции 19-23 содержат аппаратные средства и/или программное обеспечение, которые обеспечивают работу, конфигурацию, моделирование и диагностику и/или техническое обслуживание установки от высшего уровня системы управления технологическим процессом до низшего операционного уровня отдельного полевого устройства. Несмотря на то, что различные соответствующие приложения 29-33 изображены на фиг. 1 как расположенные на различных рабочих станциях, предназначенных для одной из этих функций, следует понимать, что различные приложения 29-33, связанные с этими или другими функциями установки, могут быть расположены и выполнены на тех же самых или на других рабочих станциях или компьютерах в рамках установки 10 в зависимости от потребностей и структуры установки 10. Таким образом, например, одно или большее количество управляющих приложений (например, 29) и служебных/диагностических приложений (например, 33) могут быть выполнены на одной и той же рабочей станции 19-23, тогда как различные отдельные служебные/диагностические приложения (например, 33) или различные отдельные управляющие приложения (например, 29) могут быть выполнены на разных рабочих станциях 19-23 и/или контроллерах 12.
В представленном на фиг. 1 примере рабочая станция 23 изображена как рабочая станция диагностики/технического обслуживания и содержит ряд диагностических и/или служебных приложений 33, которые могут быть использованы разным персоналом для проверки или наблюдения за потребностями всей установки 10 и/или для проверки или наблюдения за эксплуатационными или рабочими условиями различных устройств 12, 14, 16 и т.д. Приложения 33 могут включать вспомогательные приложения 33А, такие как другие служебные/диагностические приложения, калибровочные приложения, приложения анализа колебаний, приложения генерирования отчетов или любые другие вспомогательные приложения, которые могут быть использованы для помощи технологическому персоналу в выполнении служебных/диагностических функций в рамках установки 10. Например, служебное/диагностическое приложение 33А может включать приложение 33В испытания целостности седла клапана, как описано выше. В альтернативном или дополнительном варианте осуществления изобретения приложение 33В испытания целостности седла клапана может быть реализовано полностью и/или частично на любом контроллере 12 или любом полевом устройстве 14, 16 или их сочетании. Приложение 33В испытания целостности седла клапана может включать любое сочетание функциональных блоков 40, модулей управления 50, управляющих приложений 29 и служебных/диагностических приложений 30-33. Кроме того, приложение 33В испытания целостности седла клапана может являться программным алгоритмом, полностью реализованным в локальном процессоре любого клапанного полевого устройства 14, 16.
Как описано выше, любое из системных приложений, таких как приложения 29, 30, 31, 32, 33, 33A, 33B и/или любое из локальных приложений, которые могут храниться в блоке 111 управления или на запоминающем устройстве 114 позиционера 109 (или функционирующем отдельно локальном блоке 111 управления испытанием), могут осуществлять любой из способов, описанных в настоящей заявке. Способы, описанные в настоящей заявке, могут быть осуществлены посредством системы 100 испытания целостности седла клапана, представленной на фиг. 2, или посредством альтернативного варианта осуществления изобретения, такого как вариант, в котором позиционер клапана может быть отделен от блока управления системы испытания целостности седла клапана.
Следует понимать, что варианты осуществления системы управления клапаном, способа и машиночитаемой среды, описанные в настоящей заявке, могут быть выполнены на любом одном или большем количестве клапанов в системе управления технологическим процессом в то время, как система управления технологическим процессом поддерживает выполнение операций. Как описано в настоящей заявке, варианты осуществления изобретения могут определять проблемы, связанные с клапаном, которые включают износ компонентов седла, затруднения с позиционированием седла и проблемы, связанные с эрозией седла. Информация об этих и других проблемах с клапанами, которых можно избежать при помощи вариантов осуществления настоящего изобретения, описанных в настоящей заявке, представлены в следующих документах: (1) Патент США № 6 298 454 под названием "Диагностика системы управления технологическим процессом" компании Fisher-Rosemount Systems, Inc.; (2) Патент США № 7 478 012 под названием "Компьютерная оценка графиков сигнатуры клапана" компании Fisher Controls International LLC; и (3) Патент США № 8 421 643 под названием "Автоматическое испытание целостности седла клапана" компании Fisher Controls International LLC; которые включены полностью в настоящую заявку посредством ссылки.
Само собой разумеется, варианты применения и преимущества систем, способов и методов, описанных в настоящей заявке, не ограничены только вышеприведенными примерами. Многие другие варианты применения и преимущества возможны за счет использования систем, способов и методов, описанных в настоящей заявке.
Следует также понимать, что, если только термин однозначно не определен в данной заявке с использованием предложения "В настоящей заявке термин '______' означает ..." или подобного предложения, то нет никакого намерения ограничить значение данного термина, прямо или косвенно, за пределами его общепринятого или обычного значения, и такой термин не должен интерпретироваться как ограниченный в объеме на основании любой формулировки, сделанной в любом разделе данного патента (кроме текста формулы изобретения). В тех случаях, когда любой термин, приведенный в формуле изобретения в конце настоящего патента, упоминается в данном патенте в соответствии с единственным значением, это сделано лишь для ясности с тем, чтобы не путать читателя, и не предполагается, что такой термин ограничен, косвенно или иным образом, этим единственным значением. И, наконец, если только элемент формулы изобретения не задан словом "означает" и функцией без описания какой-либо структуры, не предполагается, что объем какого-либо элемента формулы изобретения интерпретируется на основании применения 35 U.S.C. § 112(f) и/или pre-AIA 35 U.S.C. § 112, шестой пункт.
Более того, несмотря на то, что предшествующий текст предлагает подробное описание различных вариантов осуществления изобретения, следует понимать, что объем изобретения задан формулой изобретения, представленной в конце настоящего документа. Подробное описание следует толковать лишь как иллюстративное и не описывающее все возможные варианты осуществления изобретения, поскольку описывать каждый возможный вариант осуществления изобретения было бы непрактично, если не невозможно. Многочисленные альтернативные варианты осуществления изобретения могут быть реализованы на основании либо существующей технологии, либо технологии, разработанной после даты подачи настоящей заявки на изобретение, что входит в объем формулы изобретения. В качестве примера, не ограничивающего настоящее изобретение, представленное в данной заявке описание предполагает по меньшей мере следующие аспекты:
Аспект 1: Способ управления клапаном, включающий обеспечение посредством одного или более процессоров первого порога закрытия и второго порога закрытия; мониторинг посредством одного или более процессоров уставки сервопривода; инициирование посредством одного или более процессоров первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и инициирование посредством одного или более процессоров второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
Аспект 2: Способ по п. 1, в котором инициирование первой процедуры закрытия включает: медленное перевозбуждение сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
Аспект 3: Способ по любому из п. 1 или 2, в котором линейное изменение уставки сервопривода включает экспоненциально затухающий сигнал.
Аспект 4: Способ по любому из п. 1-3, в котором линейное изменение уставки сервопривода включает монотонное ослабление сигнала или монотонное усиление сигнала.
Аспект 5: Способ по любому из п. 1-4, в котором инициирование первой процедуры закрытия включает установку скорости линейного изменения закрытия для соответствия скорости верхнего или нижнего предела уставки.
Аспект 6: Способ по любому из п. 1-5, в котором инициирование второй процедуры закрытия включает переключение на управление давлением с управления ходом.
Аспект 7: Способ по любому из п. 1-6, в котором инициирование первой процедуры закрытия включает использование управления по замкнутому контуру для медленного перевозбуждения сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
Аспект 8: Способ по любому из п. 1-7, в котором инициирование второй процедуры закрытия включает использование управления по разомкнутому контуру для полного насыщения сигнала I/P привода.
Аспект 9: Система управления клапаном, содержащая один или более процессоров, соединенных с памятью, и один или более модулей, хранящихся в памяти, причем выполнение одного или более модулей одним или большим количеством процессоров заставляет систему выполнять следующие функции: обеспечение первого порога закрытия и второго порога закрытия; мониторинг уставки сервопривода; возбуждение первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и возбуждение второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
Аспект 10: Система по п. 9, в которой инициирование первой процедуры закрытия включает:
медленное перевозбуждение сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
Аспект 11: Способ по п. 10, в которой линейное изменение уставки сервопривода включает экспоненциально затухающий сигнал.
Аспект 12: Система по п. 10, в которой линейное изменение уставки сервопривода включает монотонное ослабление сигнала или монотонное усиление сигнала.
Аспект 13: Система по п. 9, в которой инициирование первой процедуры закрытия включает установку скорости линейного изменения закрытия для соответствия скорости верхнего или нижнего предела уставки.
Аспект 14: Система по п. 9, в которой инициирование второй процедуры закрытия включает переключение на управление давлением с управления ходом.
Аспект 15: Система по п. 9, в которой инициирование первой процедуры закрытия включает использование управления по замкнутому контуру для медленного перевозбуждения сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
Аспект 16: Система по п. 15, в которой инициирование второй процедуры закрытия включает использование управления по разомкнутому контуру для полного насыщения сигнала I/P привода.
Аспект 17: Материальный энергонезависимый машиночитаемый носитель, содержащий команды, хранящиеся на нем для управления клапаном, причем эти команды при их исполнении одним или большим количеством процессоров компьютерной системы заставляют один или более процессоров осуществлять: обеспечение первого порога закрытия и второго порога закрытия; мониторинг уставки сервопривода; возбуждение первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и возбуждение второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
Аспект 18: Материальный энергонезависимый машиночитаемый носитель по п. 17, в котором инициирование первой процедуры закрытия включает: медленное перевозбуждение сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
Аспект 19: Материальный энергонезависимый машиночитаемый носитель по п. 18, в котором линейное изменение уставки сервопривода включает экспоненциально затухающий сигнал.
Аспект 20: Материальный энергонезависимый машиночитаемый носитель по п. 18, в котором линейное изменение уставки сервопривода включает монотонное ослабление сигнала или монотонное усиление сигнала.
Аспект 21: Материальный энергонезависимый машиночитаемый носитель по п. 17, в котором инициирование первой процедуры закрытия включает установку скорости линейного изменения закрытия для соответствия скорости верхнего или нижнего предела уставки.
Аспект 22: Материальный энергонезависимый машиночитаемый носитель по п. 17, в котором инициирование второй процедуры закрытия включает переключение на управление давлением с управления ходом.
Аспект 23: Материальный энергонезависимый машиночитаемый носитель по п. 17, в котором инициирование первой процедуры закрытия включает использование управления по замкнутому контуру для медленного перевозбуждения сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
Аспект 24: Материальный энергонезависимый машиночитаемый носитель по п. 23, в котором инициирование второй процедуры закрытия включает использование управления по разомкнутому контуру для полного насыщения сигнала I/P привода.
Изобретение относится к системам управления технологическими процессами, включающими клапаны, и, в частности, к способам управления клапанами. Изобретение включает способ, устройство и машиночитаемый носитель для управления клапаном. Варианты осуществления изобретения используют порог мягкого закрытия и процедуру мягкого закрытия, во время которой контроллер осуществляет монотонное линейное изменение уставки сервопривода с целью медленного перевозбуждения сервопривода за пределами диапазона калиброванных уставок, где сервопривод переходит к этапу жесткого закрытия, когда уставка сервопривода достигает предварительно заданного порога перевозбуждения. В результате при управлении клапаном устраняются чувствительность к погрешностям калибровки хода, заклинивание или зажатие клапанов, вибрация при работе контроллера технологического процесса вблизи жесткого останова. 3 н. и 21 з.п. ф-лы, 4 ил.
1. Способ управления клапаном, включающий:
обеспечение посредством одного или более процессоров первого порога закрытия и второго порога закрытия;
мониторинг посредством одного или более процессоров уставки сервопривода;
инициирование посредством одного или более процессоров первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и
инициирование посредством одного или более процессоров второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
2. Способ по п.1, в котором инициирование первой процедуры закрытия включает:
медленное перевозбуждение сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
3. Способ по любому из предшествующих пунктов, в котором линейное изменение уставки сервопривода включает экспоненциально затухающий сигнал.
4. Способ по любому из предшествующих пунктов, в котором линейное изменение уставки сервопривода включает монотонное ослабление сигнала или монотонное усиление сигнала.
5. Способ по любому из предшествующих пунктов, в котором инициирование первой процедуры закрытия включает установку скорости линейного изменения закрытия для соответствия скорости верхнего или нижнего предела уставки.
6. Способ по любому из предшествующих пунктов, в котором инициирование второй процедуры закрытия включает переключение на управление давлением с управления ходом.
7. Способ по любому из предшествующих пунктов, в котором инициирование первой процедуры закрытия включает использование управления по замкнутому контуру для медленного перевозбуждения сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
8. Способ по любому из предшествующих пунктов, в котором инициирование второй процедуры закрытия включает использование управления по разомкнутому контуру для полного насыщения сигнала I/P привода.
9. Система управления клапаном, содержащая один или более процессоров, соединенных с памятью, и один или более модулей, хранящихся в памяти, причем выполнение одного или более модулей одним или большим количеством процессоров заставляет систему выполнять следующие функции:
обеспечение первого порога закрытия и второго порога закрытия;
мониторинг уставки сервопривода;
инициирование первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и
инициирование второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
10. Система по п.9, в которой инициирование первой процедуры закрытия включает:
медленное перевозбуждение сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
11. Система по любому из предшествующих пунктов, в которой линейное изменение уставки сервопривода включает экспоненциально затухающий сигнал.
12. Система по любому из предшествующих пунктов, в которой линейное изменение уставки сервопривода включает монотонное ослабление сигнала или монотонное усиление сигнала.
13. Система по любому из предшествующих пунктов, в которой инициирование первой процедуры закрытия включает установку скорости линейного изменения закрытия для соответствия скорости верхнего или нижнего предела уставки.
14. Система по любому из предшествующих пунктов, в которой инициирование второй процедуры закрытия включает переключение на управление давлением с управления ходом.
15. Система по любому из предшествующих пунктов, в которой инициирование первой процедуры закрытия включает использование управления по замкнутому контуру для медленного перевозбуждения сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
16. Система по любому из предшествующих пунктов, в которой инициирование второй процедуры закрытия включает использование управления по разомкнутому контуру для полного насыщения сигнала I/P привода.
17. Материальный энергонезависимый машиночитаемый носитель, содержащий команды, хранящиеся на нем, для управления клапаном, причем эти команды при их исполнении одним или большим количеством процессоров компьютерной системы заставляют один или более процессоров осуществлять:
обеспечение первого порога закрытия и второго порога закрытия;
мониторинг уставки сервопривода;
инициирование первой процедуры закрытия в ответ на пересечение уставкой сервопривода первого порога закрытия; и
инициирование второй процедуры закрытия в ответ на пересечение уставкой сервопривода второго порога закрытия.
18. Материальный энергонезависимый машиночитаемый носитель по п.17, в котором инициирование первой процедуры закрытия включает:
медленное перевозбуждение сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
19. Материальный энергонезависимый машиночитаемый носитель по любому из предшествующих пунктов, в котором линейное изменение уставки сервопривода включает экспоненциально затухающий сигнал.
20. Материальный энергонезависимый машиночитаемый носитель по любому из предшествующих пунктов, в котором линейное изменение уставки сервопривода включает монотонное ослабление сигнала или монотонное усиление сигнала.
21. Материальный энергонезависимый машиночитаемый носитель по любому из предшествующих пунктов, в котором инициирование первой процедуры закрытия включает установку скорости линейного изменения закрытия для соответствия скорости верхнего или нижнего предела уставки.
22. Материальный энергонезависимый машиночитаемый носитель по любому из предшествующих пунктов, в котором инициирование второй процедуры закрытия включает переключение на управление давлением с управления ходом.
23. Материальный энергонезависимый машиночитаемый носитель по любому из предшествующих пунктов, в котором инициирование первой процедуры закрытия включает использование управления по замкнутому контуру для медленного перевозбуждения сервопривода посредством линейного изменения уставки сервопривода от первого порога закрытия до значения за пределами диапазона калиброванных уставок.
24. Материальный энергонезависимый машиночитаемый носитель по любому из предшествующих пунктов, в котором инициирование второй процедуры закрытия включает использование управления по разомкнутому контуру для полного насыщения сигнала I/P привода.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| СИСТЕМА НАСТРОЙКИ ХАРАКТЕРИСТИК РЕГУЛИРУЮЩЕГО ВЕНТИЛЯ И СИСТЕМА (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ КЛАПАНОМ РЕГУЛИРУЮЩЕГО ВЕНТИЛЯ | 2007 |
|
RU2424449C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

