Область техники, к которой относится изобретение
Настоящее изобретение относится главным образом к области сервоконтроллеров для использования в логических процессах или управляющих контурах и конкретнее к расширениям электропневматических управляющих контуров и других логических процессов для улучшения функционирования клапанов управления и дополнительных устройств пневматических приводов.
Уровень техники
Электропневматические системы управления применяются все чаще в устройствах управления, таких как приводы клапанов и поршневые приводы, с целью обеспечения улучшенного или более оптимального управление текучей средой в технологическом оборудовании. Некоторые такие электропневматические системы управления включают один или более дополнительный элемент для управления приводами клапанов и поршневыми приводами, например, объемные бустеры или клапаны с быстрым выпуском (QEV, quick exhaust valves). Объемный бустер, который обычно связан с пневматическим приводом клапана, увеличивает расход воздуха, подаваемого в пневматический привод, или увеличивает расход воздуха, выпускаемого из пневматического привода. Такое увеличенное движение воздуха увеличивает скорость хода привода, увеличивая, таким образом, скорость, с которой привод может передвинуть затвор клапана к открытому или закрытому положению, позволяя тем самым клапану быстрее реагировать на отклонения в процессе. Подобно объемному бустеру клапан с быстрым выпуском увеличивает скорость, с которой привод может передвинуть клапан к открытому или закрытому положению.
В настоящее время объемные бустеры используются вместе с пневматическими приводами таким образом, что приводы двигаются очень медленно, в ответ на малые изменения уставки или сигнала управления. В частности, чтобы помочь стабилизировать общую динамику управляющего контура, некоторые объемные бустеры проектируются со встроенной зоной нечувствительности (dead band, "мертвой зоной"), которая предотвращает активизацию объемного бустера в ответ на сигналы управления мало меняющейся амплитуды. Хотя некоторые объемные бустеры имеют маленькие зоны нечувствительности, эти объемные бустеры, однако, двигаются очень медленно в ответ на изменения сигнала малой амплитуды и становятся быстрыми только в ответ на входные сигналы большей амплитуды. Чтобы регулировать чувствительность бустера и позволить приводам реагировать на сигналы малой амплитуды, в конструкцию объемных бустеров часто включаются обходные ограничители в виде игольчатых клапанов.
Устройства позиционирования клапанов используют отсечку хода для обеспечения того, что достигается полная нагрузка на седло, когда опорный сигнал падает ниже предварительно определенного порога. Когда отсечки задействованы, сервомеханизм обходится, и управляющий сигнал на преобразователь «ток-давление» (I/Р) устанавливается в 0% или в 100% в зависимости от состояния отказа данного привода и действующего предела. Чтобы отодвинуть клапан от седла (или от верхнего ограничителя перемещения) обратно в активную зону, устройство позиционирования клапана должно переводить пневматику привода в состояние отсечки или выводить из состояния отсечки.
Когда клапан находится на седле клапана, и клапану посылается команда малой амплитуды, такая как медленное линейно возрастающее или малое ступенчатое изменение, то сигналы ошибки сервопривода малы, и, прежде чем клапан отреагирует, может присутствовать значительная задержка. Задержка клапана при отходе от седла клапана и достижении уставки может быть особенно значительной для приводов большого объема, снабженных объемными бустерами, так как объемные бустеры не могут активизироваться в ответ на столь малые изменения сигнала. Объемные бустеры обычно имеют зону нечувствительности порядка 5% и редко активизируются в ответ на сигналы ниже 5%. Если объемные бустеры не активизируются, устройство позиционирования будет наполнять воздухом или выпускать воздух из привода через обходной ограничитель бустера, таким образом вызывая дальнейшую задержку в отклике клапана.
Для компрессорных систем управления задержка в реакции клапана является особенно проблематичной, поскольку логика управления компрессора часто требует, чтобы противопомпажный клапан быстро отошел от седла в ответ на сигналы малой амплитуды. Например, когда скорость потока в компрессорной системе падает, желательно направить поток в обход компрессора, чтобы уберечь его от броска давления. Поскольку объемы вниз по потоку от компрессора обычно велики, скорости потока в общем случае падают постепенно. Если скорость потока или эквивалентная контрольная переменная опускается ниже заданного порога, контроллер компрессора начнет медленно отодвигать клапан от седла, чтобы обеспечить требуемую скорость потока через компрессор. Чтобы довести эффективность компрессора до максимума и предотвратить значительные сбои в системе, часто желательно, чтобы противопомпажный клапан работал данным образом настолько долго, насколько это возможно, перед посылкой клапану отключающего сигнала, который полностью его откроет.
Раскрытие изобретения
Представлена система для вывода затвора клапана из седла клапана управления, содержащая управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; фильтр опережения-запаздывания, связанный с входом управляющего контура, причем на вход управляющего контура подается кратковременный опорный сигнал управления для перегрузки входного сигнала управления в цепи усиления в прямом направлении управляющего контура или в преобразователе «ток-давление» с получением выходного сигнала, побуждающего движение затвора клапана.
Предпочтительно фильтр опережения-запаздывания включает программирование для управления исходным состоянием фильтра опережения-запаздывания.
Кратковременный опорный сигнал предпочтительно генерируется функцией переключения, обеспечивающей искусственный управляющий сигнал в течение предварительно заданного промежутка времени.
Программирование фильтра опережения-запаздывания может принимать, по меньшей мере, одно искусственное исходное состояние и в ответ на указанное, по меньшей мере, одно искусственное исходное состояние выдавать выходной сигнал, компенсирующий разницу между искусственным исходным состоянием и ожидаемым исходным состоянием посредством усиления выходного сигнала.
Также представлена система для настройки отклика клапана управления, содержащая управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; фильтр опережения-запаздывания, связанный с входом управляющего контура; контроллер процесса, подающий опорный сигнал управления на вход фильтра опережения-запаздывания; и пользовательский интерфейс, связанный с фильтром опережения-запаздывания, причем пользовательский интерфейс включает, по меньшей мере, один регулируемый элемент интерфейса, при этом регулировка указанного элемента интерфейса или каждого из элементов интерфейса обеспечивает изменение, по меньшей мере, одного коэффициента настройки, относящегося к фильтру опережения-запаздывания, а пользовательский интерфейс включает изменяемый пользователем входной параметр для задания установки исходного состояния, с получением усиленного выходного сигнала фильтра опережения-запаздывания в ответ на входной сигнал малой амплитуды.
Предпочтительно регулировка, по меньшей мере, одного элемента интерфейса пользовательского интерфейса создает искусственное исходное состояние, а фильтр опережения-запаздывания включает программирование, которое обеспечивает компенсацию выходным сигналом разницы между искусственным исходным состоянием и ожидаемым исходным состоянием посредством усиления выходного сигнала.
Искусственное исходное состояние предпочтительно имеет отрицательное значение.
Предпочтительно изменяемый пользователем входной параметр выбран из множества предварительно определенных входных параметров.
Также предложен способ выведения затвора клапана из седла клапана управления, включающий подачу опорного сигнала управления на вход управляющего контура, включающего контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; предоставление фильтра опережения-запаздывания в сочетании с сигналом управления; предоставление пользовательского интерфейса, связанного с фильтром опережения-запаздывания, причем указанный пользовательский интерфейс выполнен с возможностью содействия удаленному управлению отношением опережения к запаздыванию, производимым фильтром опережения-запаздывания; и управление выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя для обеспечения требуемого уровня перемещения затвора клапана относительно седла клапана управления в ответ на входной сигнал малой амплитуды.
Предпочтительно при управлении выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя обеспечивают подачу искусственного исходного состояния на вход фильтра опережения-запаздывания регулируемым элементом интерфейса пользовательского интерфейса.
Регулируемый элемент интерфейса может быть выполнен с возможностью выбора одного из множества доступных предварительно определенных искусственных исходных состояний для подачи на вход фильтра опережения-запаздывания.
Предпочтительно при подаче искусственного исходного состояния на вход фильтра опережения-запаздывания исполняют программирование, относящееся к фильтру опережения-запаздывания, которое выдает выходной сигнал фильтра опережения-запаздывания для компенсации разницы между искусственным исходным состоянием и ожидаемым исходным состоянием посредством усиления выходного сигнала.
При подаче искусственного исходного состояния искусственное состояние предпочтительно соответствует отрицательному значению.
Предпочтительно при управлении выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя функция переключения задает исходное состояние уставки сервопривода, относящейся к клапану управления, в течение предварительно определенного промежутка времени.
Предварительно определенный промежуток времени предпочтительно составляет менее одной секунды.
Предпочтительно функция переключения обеспечивает максимальное возбуждение уставки сервопривода, относящейся к клапану управления.
Предпочтительно при управлении выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя преобразователь «ток-давление» инициализируют в 0% в течение предварительно определенного промежутка времени, а затем приводят до номинального рабочего уровня.
В другом варианте представлена система для выведения затвора клапана из седла клапана управления, содержащая управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; переключатель, соединенный с цепью усиления в прямом направлении управляющего контура или преобразователем «ток-давление», при этом переключатель содержит программирование для управления искусственным опорным сигналом с получением выходного сигнала, побуждающего движение затвора клапана.
Программирование переключателя может включать функцию переключения для обеспечения искусственного сигнала управления в течение предварительно определенного промежутка времени.
Переключатель предпочтительно предусмотрен на сумматоре, связанном с цепью усиления в прямом направлении управляющего контура или преобразователем «ток-давление».
Краткое описание чертежей
На фиг.1 изображена блок-схема электропневматической системы управления, дополненной входным фильтром опережения-запаздывания.
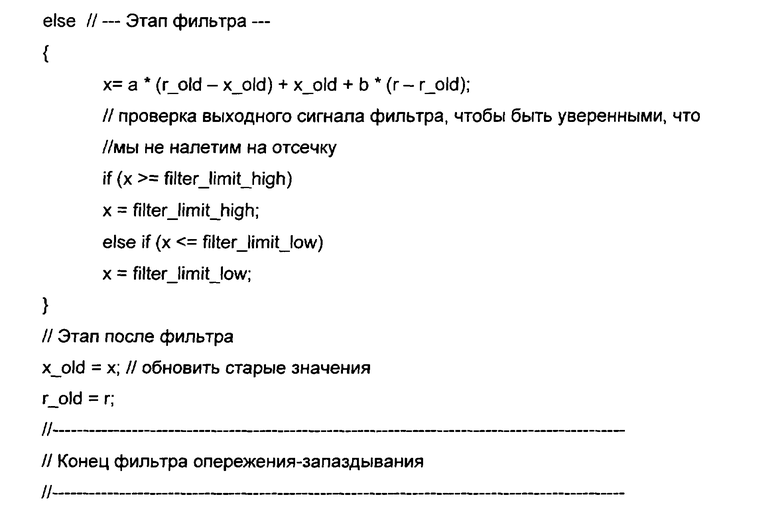
На фиг.2 изображен пример экранного вывода, сгенерированного программой пользовательского интерфейса электропневматической системы управления, схематически показанной на фиг.1, иллюстрирующий уставку хода, отложенную относительно времени, и отклик фильтра опережения-запаздывания, отложенный относительно времени, когда фильтр задействован;
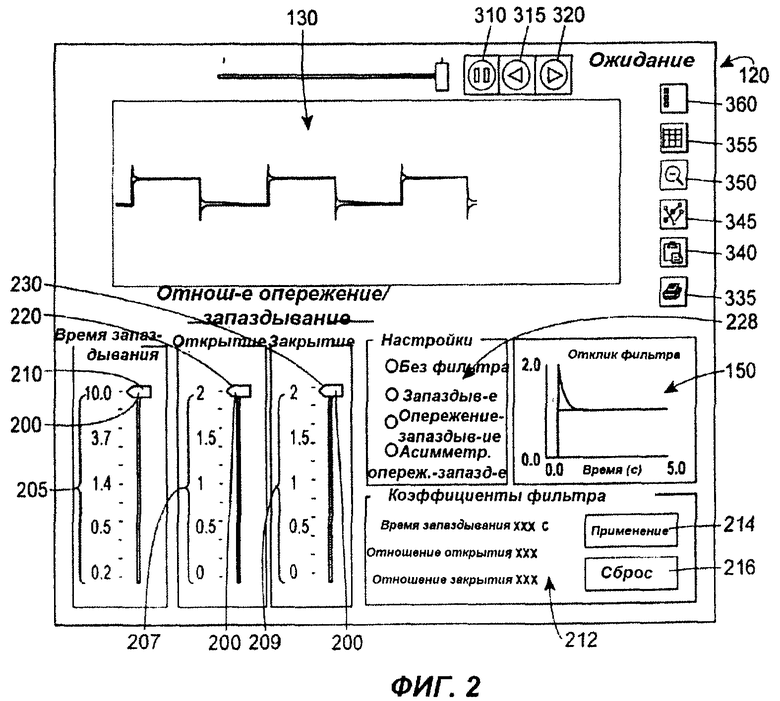
На фиг.3 изображен пример экранного вывода, сгенерированный программой пользовательского интерфейса электропневматической системы управления, такой как схематически изображенная на фиг.1, показывающий уставку хода, отложенную относительно времени, и отклик фильтра опережения-запаздывания, отложенный относительно времени, когда входной фильтр опережения-запаздывания отключен;
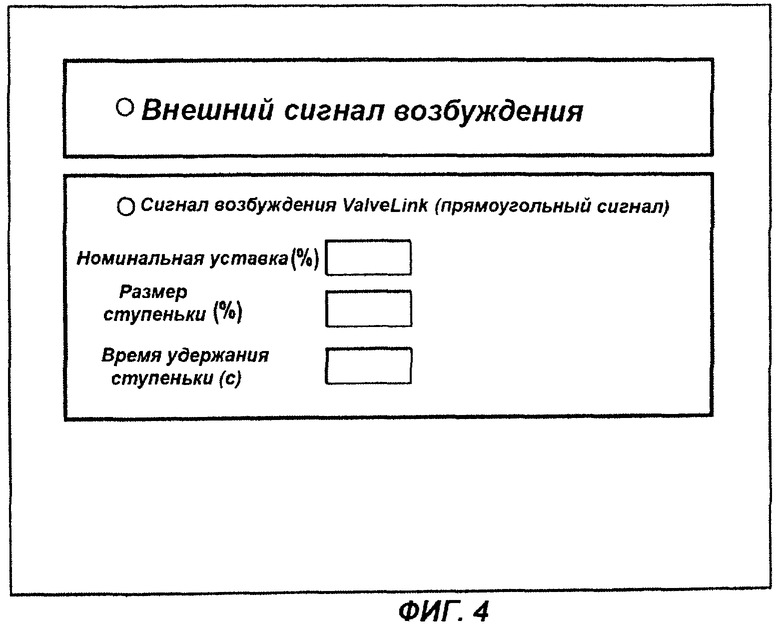
На фиг.4 изображен примерный экранный вывод меню, позволяющего пользователю выбирать источник возбуждения для фильтра опережения-запаздывания управляющего контура, а также вводить значения в поля ввода данных, когда данные поля доступны для ввода;
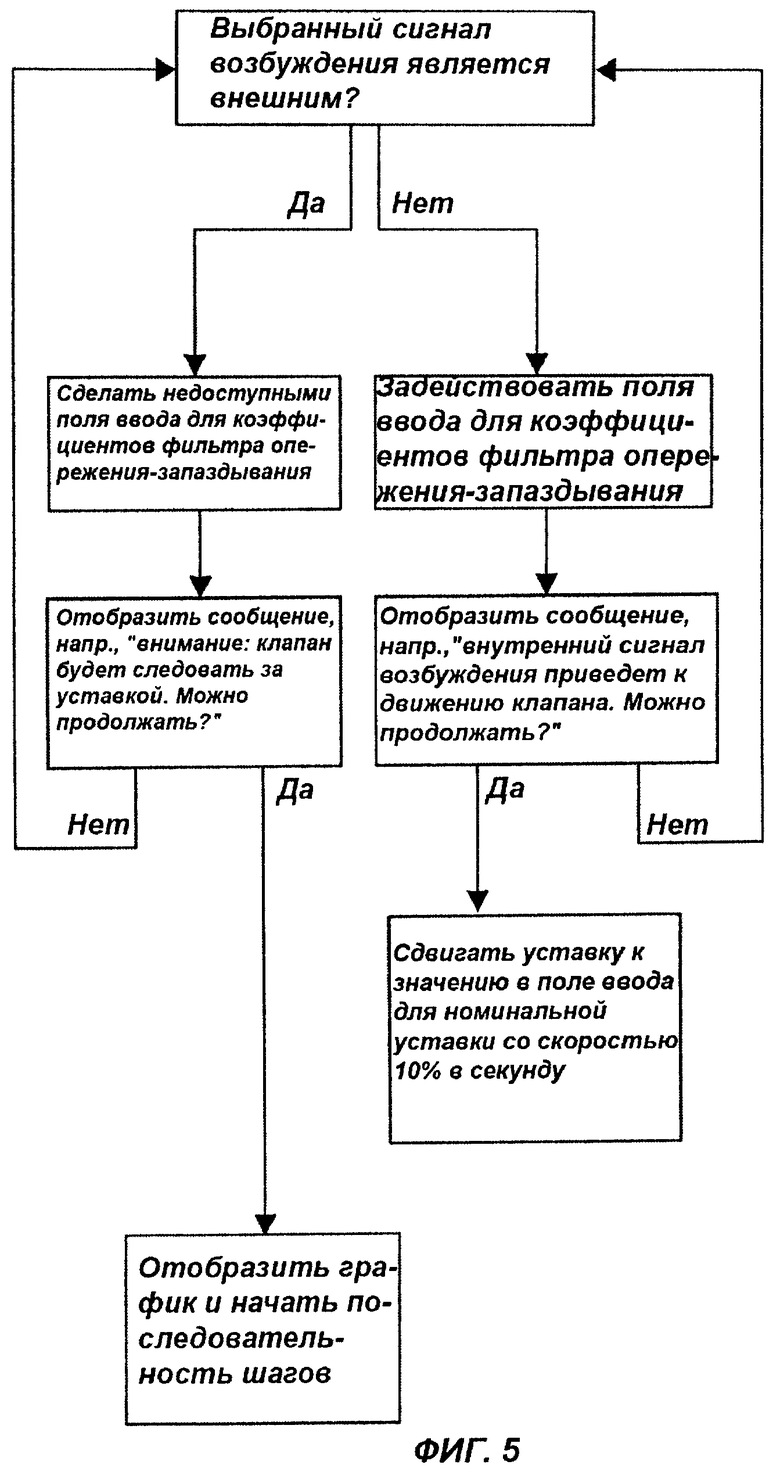
На фиг.5 изображена схема, изображающая выполняемые действия и отображаемую информацию в результате различного ввода в пользовательском интерфейсе электропневматической системы управления;
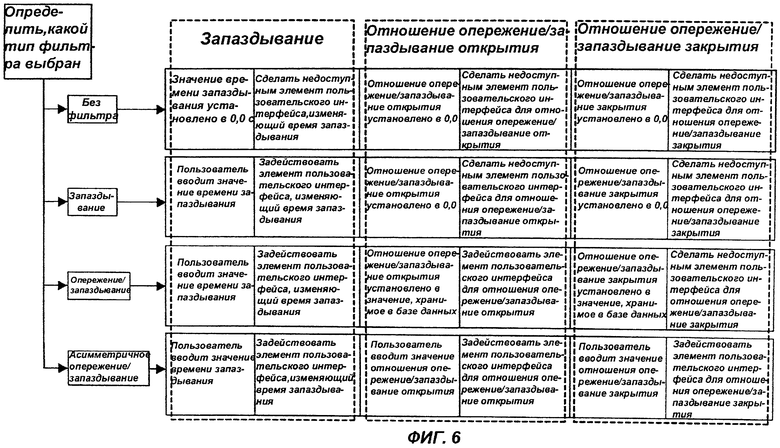
На фиг.6 изображена схема, изображающая состояние различных элементов ввода в ответ на выбор конкретного типа фильтра;
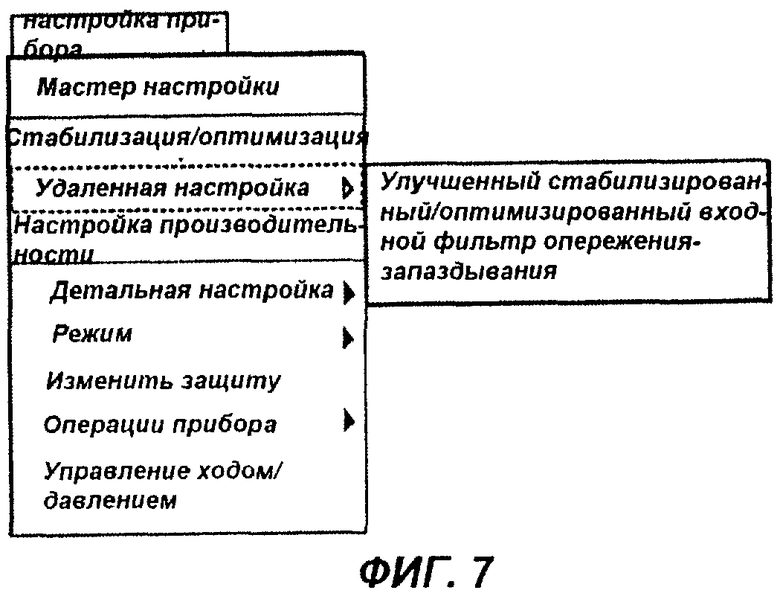
На фиг.7 изображен примерный экранный вывод меню, которое позволяет пользователю выбирать среди различных установок управления устройством, включая установку «Удаленная настройка»;
На фиг.8 изображена блок-схема электропневматической системы управления, дополненной функцией переключения, напрямую связанной с управляющей схемой преобразователя «ток-давление»;
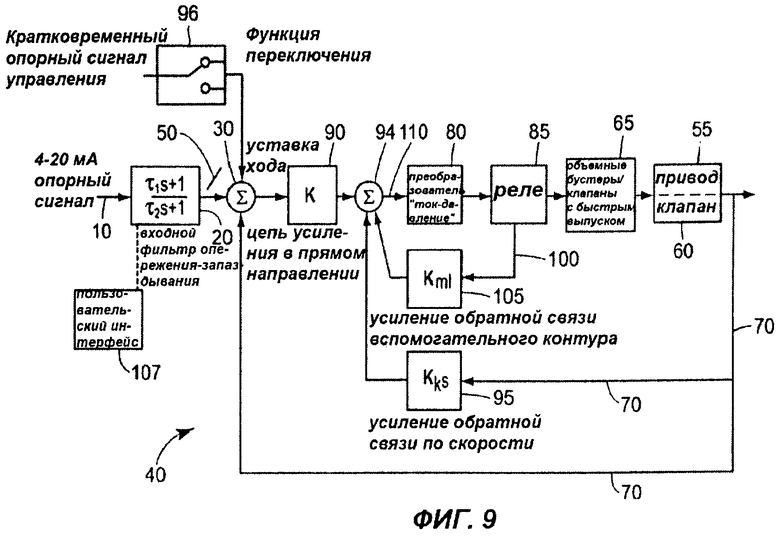
На фиг.9 изображена блок-схема электропневматической системы управления, дополненной функцией переключения, напрямую связанной с цепью усиления в прямом направлении;
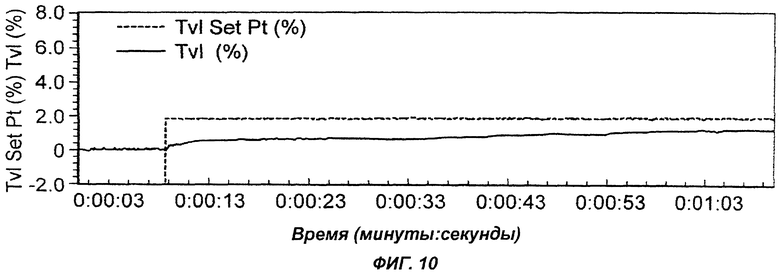
На фиг.10 изображен график уставки хода и хода в зависимости от времени, графически изображающий типичный начальный отклик привода большого объема на изменения уставки малой амплитуды из состояния отсечки; и
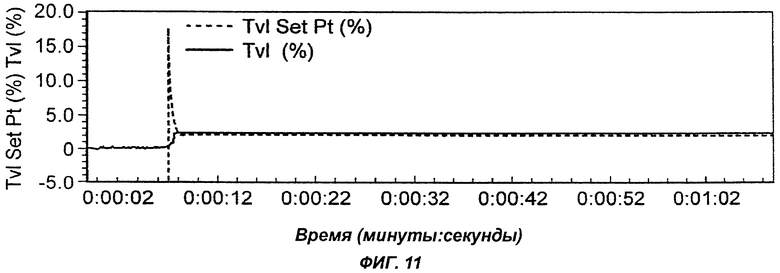
На фиг.11 изображен график, подобный графику фиг.10, но графически изображающий начальный отклик того же самого привода большого объема на то же самое изменение сигнала, когда командный сигнал сервоприводу перегружен посредством установки соответствующего начального состояния на входе фильтра опережения-запаздывания по настоящему изобретению, что способствует улучшенному времени отклика клапана на изменения сигнала малой амплитуды.
Осуществление изобретения
Вообще говоря, входной фильтр опережения-запаздывания расположен перед контуром обратной связи устройства позиционирования в сочетании с одним или более дополнительным элементом клапана, таким как объемный бустер или клапан с быстрым выпуском, для того, чтобы преодолеть медленную динамику, свойственную дополнительным элементам при получении сигналов управления или сигналов установки рабочей точки с малым изменением амплитуды. Дополнительно пользовательский интерфейс позволяет оператору или иному обслуживающему персоналу наблюдать и изменять рабочие характеристики входного фильтра опережения-запаздывания с целью получения управляющего контура, имеющего любую из набора желаемых характеристик отклика. Управляя соотношением «опережение-запаздывание» входного фильтра опережения-запаздывания, можно управлять параметром процесса, таким как смещение или ход штока клапана, и, в частности, производить точную настройку.
Фиг.1 изображает управляющий контур 40, такой как электропневматический управляющий контур или другой логический процесс, снабженный фильтром 20 опережения-запаздывания, подключенным к его входу. В частности опорный сигнал 10 управления, такой как сигнал уставки величиной от 4 до 20 мА или сигнал управления, генерируемый контроллером процесса или пользовательским интерфейсом, подается на вход входного фильтра 20 опережения-запаздывания, который воздействует на опорный сигнал (который может быть сигналом уставки или другим сигналом управления) для того, чтобы обеспечить отфильтрованный выход 50 (также называемый сигналом уставки хода) на сумматор 30, соединенный с электропневматическим управляющим контуром 40. Как показано на фиг.1, сумматор 30 сравнивает ход клапана с сигналом 50 уставки хода для генерации сигнала ошибки, который подается на усилитель или усилительный модуль 90 (называемый усилительным модулем прямого направления), производящий усиление с коэффициентом К. Выходной сигнал с усилительного модуля 90 прямого направления подается на следующий сумматор 94, который суммирует (в данном случае вычитает) усиление обратной связи по скорости, производимое усилительным модулем 95, и усиление обратной связи вспомогательного контура, производимое усилительным модулем 105 на выходе усилительного модуля 90 прямого направления. Выход 110 сумматора 94 подается на преобразователь 80 «ток-давление» (I/P), который вырабатывает и подает пневматический сигнал или сигнал давления на пневматическое реле 85. Как показано на фиг.1, измерение положения 100 реле подается в усилительный модуль 105 и используется для получения усиления обратной связи вспомогательного контура.
Пневматический выход реле 85 поступает в объемный бустер или клапан 65 с быстрым выпуском. Этот пневматический сигнал используется для управления приводом клапана привода 55, связанного с клапаном 60. Как показано на фиг.1, измеренный ход затвора клапана или положение штока клапана, с которым связан затвор клапана, поступает на сумматор 30 для сравнения с сигналом уставки хода, а также в усилительный модуль 95 обратной связи по скорости для получения усиления обратной связи по скорости. По меньшей мере, один датчик (не показан) используется для определения измеряемого хода затвора клапана или положения штока клапана.
Вообще говоря, передаточная функция и функционирование входного фильтра 20 опережения-запаздывания могут конфигурироваться через пользовательский интерфейс 107. В частности, технический персонал может удаленным способом регулировать сигнал 50 уставки хода для приведения в действие пневматического привода 55 и клапана 60 управления или другого устройства, управляемого электропневматическим управляющим контуром 40, путем регулировки параметров фильтра 20 опережения-запаздывания. Пользовательский интерфейс 107 может быть предусмотрен с целью обеспечения возможности удаленного мониторинга, управления или коммуникации с электропневматическим управляющим контуром 40 из удаленного местоположения или из местоположения в непосредственной близости от управляющего контура 40.
Во время работы фильтр 20 опережения-запаздывания в общем случае будет выдавать импульс с большой амплитудой, но с малой длительностью в начале каждого ступенчатого изменения в получаемом опорном сигнале 10, что позволяет клапану 60 передвигаться меньшими шагами. В дополнение к этому в отклике фильтра обеспечивается быстрое затухание (что отражается в малом времени запаздывания) для ослабления перескока при больших шагах.
Хотя распределенная система управления (DCS, distributed control system) обычно обновляется с частотой порядка 1 Гц или меньше, устройство позиционирования (в управляющем контуре 40) может обновляться с частотой 100 Гц и более. В результате время отклика, обеспечиваемое фильтром 20 опережения-запаздывания, включенным последовательно с устройством позиционирования, может составлять порядка 100 мс, что намного быстрее того, что может обеспечить управляющая динамика одной только распределенной системы управления.
В дополнение к этому фильтр 20 опережения-запаздывания может обеспечить собственную защиту против перегрузки затвора клапана 60 при посадке в седло клапана или при достижении верхнего ограничителя хода. В частности, могут быть реализованы алгоритмы или управляющие процедуры в самом фильтре 20 или как его составная часть, ограничивающие отклик клапана вблизи седла клапана или ограничителя хода, и, таким образом, предотвратить ситуацию, когда фильтр 20 опережения-запаздывания ударит затвор клапана 60 о седло клапана или о верхний ограничитель хода.
Более того, как будет ясно с учетом фиг.2 и 3, рабочие характеристики фильтра 20 опережения-запаздывания можно легко отрегулировать с помощью пользовательского интерфейса 107, который может быть сохранен в компьютере и оперативно соединен с управляющим контуром 40 и одним или более дисплеем. Ввиду того, что многие процессы, использующие большие приводы со сложной конфигурацией дополнительных элементов, обычно требуют сложных и высокоспециализированных управляющих алгоритмов для управления контуром процесса, операторы, как правило, неохотно изменяют контроллер процесса посредством добавления динамики в управляющую процедуру. Вместо этого операторы обычно предпочитают воздействовать или менять динамику на уровне клапана. Фильтр 20 опережения-запаздывания, который можно изменять для изменения динамики процесса как на уровне клапана, так и на уровне контура, предоставляет оператору возможность именно такого управления.
Как показано на фиг.1, входной фильтр 20 опережения-запаздывания преимущественно реализован в комбинации с пользовательским интерфейсом 107, таким как компьютерная программа с дружественной графикой реального времени. Для воплощения функциональности и признаков, описанных здесь, могут быть задействованы одна или более программ и один или более процессор, связанные с пользовательским интерфейсом 107, входной фильтр 20 опережения-запаздывания и одно или более устройств или компонентов в управляющем контуре 40.
Пользовательский интерфейс 107 преимущественно реализован совместно с графическим пользовательским интерфейсом (GUI) для облегчения взаимодействия пользователя с различными возможностями, предоставляемыми пользовательским интерфейсом 107 и входным фильтром 20 опережения-запаздывания. GUI может включать одну или более программ, которые реализованы с использованием любых подходящих языков программирования и техник. Более того, программы, реализующие GUI, могут быть сохранены и исполнены в пределах одной станции обработки или модуля, такого как, например, рабочая станция, контроллер и т.д., например, в машинном зале станции управления или в центральном машинном комплексе для одной или нескольких географически удаленных станций управления, или в ином варианте программы графического пользовательского интерфейса могут быть сохранены и исполнены распределенным способом, с использованием множества обрабатывающих модулей, которые связаны один с другим с возможностью коммуникации.
Предпочтительно, но необязательно, графический интерфейс можно создать на основе привычной графической оконной структуры и внешнего вида, в которой множество взаимосвязанных графических видов или страниц включает одно или более ниспадающее меню, которое дает возможность пользователю осуществлять навигацию по страницам желаемым образом, чтобы видеть и/или получать конкретный тип информации. Признаки и/или способности пользовательского интерфейса 107, описанные здесь, могут быть представлены, открыты для доступа, приведены в действие и т.д. посредством одной или более соответствующих страниц, видов или экранов GUI. Более того, различные экраны, составляющие графический интерфейс пользователя, могут быть логично связаны между собой, способствуя быстрой и интуитивной навигации пользователя на экранах дисплеи для получения информации конкретного типа или для доступа и/или задействования конкретной возможности графического интерфейса 107 и входного фильтра 20 опережения-запаздывания.
Пример такого GUI в общем виде изображен на дисплее 120, показанном на фиг.2. Как изображено на фиг.2, дисплей 120 графически отображает выходной сигнал фильтра или сигнал 50 уставки хода и данные обратной связи по положению, используя, например, данные, полученные из сигнала 70 обратной связи привода или сигнала 100 обратной связи по положению реле. Сигналы 70 и 100 обратной связи пропорционально изменяются в ответ на изменения в параметре процесса, с которым они связаны, в данном случае с положением привода 55 или реле 85, так что графическое отображение изменений в сигналах 70 и 100 обратной связи обеспечивает точную индикацию реального изменения положения штока клапана. Такая графика реального времени обеспечивает возможность удаленной настройки клапана 60 и обеспечивает измеримые результаты. В дополнение к этому удаленная настройка контура клапана управления посредством пользовательского интерфейса 107 значительно снижает стоимость обслуживания за счет отказа от физического посещения с целью облуживания отдельных клапанов управления.
Машинный зал с одним или более компьютерным терминалом для доступа к пользовательскому интерфейсу 107 может располагаться географически рядом с клапанами или контурами, подлежащими управлению. В качестве альтернативы для предоставления удаленного доступа к пользовательскому интерфейсу 107 в географически удаленных местоположениях могут быть использованы спутниковые коммуникации, телефонные линии, коаксиальный кабель, Ethernet (локальные сети), оптоволоконные кабели связи, интранет или Интернет и другие технологические средства дальних коммуникаций. Может быть предусмотрен центральный управляющий комплекс, в котором располагается один или более компьютерный терминал для доступа к пользовательским интерфейсам 107, связанным с клапанами или контурами, снабженными фильтрами 70 опережения-запаздывания, расположенными в местоположениях, отделенных большими расстояниями от центрального управляющего комплекса. Как более подробно объясняется ниже, пользовательский интерфейс 107 снабжен графиком, позволяющим оператору или технику предсказывать или наблюдать отклик фильтра при выборе конкретных установок для различных регулируемых пользователем параметров входного фильтра 20 опережения-запаздывания.
Хотя имеет место неустранимая задержка при передаче сигналов или данных посредством одной или комбинации различных коммуникативных технологий, особенно на больших расстояниях, пользовательский интерфейс 107 можно использовать в режиме, учитывающем такие задержки, в том случае, если длительность задержек известна или может быть вычислена или определена. Например, пользовательский интерфейс 107 может предоставлять пользователю или оператору возможность применять конкретный набор регулировок к устанавливаемым пользователем параметрам входного фильтра 20 опережения-запаздывания, которые пользователь или оператор предварительно построил, используя возможности пользовательского интерфейса 107 по предсказанию отклика, что более подробно обсуждается ниже. Если новый набор регулировок надо применить к клапану или контуру в удаленном местоположении в выбранное пользователем или оператором время, пользовательский интерфейс 107 может внести эту задержку в вычисление времени для передачи реальных сигналов во входной фильтр 20 опережения-запаздывания конкретного клапана или контура. Например, если пользователь или оператор хочет задействовать новый набор регулировок через 10 секунд и также известна или вычислена задержка в 0,5 секунды, то реальный сигнал во входной фильтр 20 опережения-запаздывания может быть послан через 9,5 секунды. Предполагается, что пользователь или оператор получает и выводит в режиме реального времени выход фильтра и данные обратной связи по ходу, относящиеся к реальному клапану управления или управляющему контуру, к которым был добавлен входной фильтр 20 опережения-запаздывания.
Используя компьютерную программу для управления параметрами, относящимися к клапану управления, такую как программу AMS ValveLink® Software, поставляемую отделением Fisher Controls фирмы Emerson Process Management, пользовательский интерфейс 107 может быть сконфигурирован так, чтобы отображать в режиме реального времени выход фильтра и данные обратной связи по ходу клапана управления или другого устройства, с которым используется входной фильтр 20 опережения-запаздывания. Также можно отобразить дополнительные данные, например, опорный сигнал устройства. Например, как показано на фиг.2 на графике 130, пользовательский интерфейс 107 может построить в GUI уставку хода в реальном времени ("Tvl Set Pt") и данные обратной связи по ходу ("Tvl"), показываемые в процентах, в зависимости от времени, чтобы оператор мог легко видеть отклик клапана управления на изменения в опорном сигнале.
Улучшенное управление, достигаемое использованием входного фильтра 20 опережения-запаздывания при малых амплитудах, можно оценить посредством сравнения графика 130, показанного на графическом дисплее 120 на фиг.2, отражающего данные в режиме реального времени для уставки 50 хода и обратной связи 79 по ходу, собранные во время использования входного фильтра 20 опережения-запаздывания, с графиком 135, показанном на дисплее 140 на фиг.3, отражающим данные, собранные, когда входной фильтр опережения-запаздывания выключен или отключен после метки времени 0:02:12, где время показано на горизонтальной оси графика в часах, минутах и секундах. Можно видеть, что без фильтра 20 опережения-запаздывания отклик клапана 60 ухудшается и замедляется в результате простого ступенчатого изменения сигнала уставки хода (эталонного сигнала). Графики реального времени, такие как показаны на фиг.2 и 3, особенно полезны для настройки входного фильтра 20 опережения-запаздывания, учитывая чувствительность и сложность, связанные с динамикой клапана, даже при малых амплитудах.
Возвращаясь к фиг.2, для облегчения работы коэффициенты настройки, соответствующие входному фильтру 20 опережения-запаздывания, могут быть представлены на дисплее 120 программы пользовательского интерфейса посредством графика 150 отклика фильтра. Дополнительно коэффициенты настройки (и, следовательно, передаточная функция), соответствующие фильтру 20 опережения-запаздывания, можно изменить, используя один или более виртуальных элементов 200 управления интерфейсом, изображенных на фиг.2 в виде графического представления ползунков 210, 220 и 230. Управляющий оператор или техник может манипулировать ползунками 210, 220 и 230, используя, например, компьютерное устройство ввода (не показано), такое как мышь, джойстик, трэкбол, клавиатура, монитор с сенсорным экраном, устройство голосового ввода, графический планшет и т.д., для внесения изменений в передаточную функцию или динамику входного фильтра 20 опережения-запаздывания. Конечно, этот список компьютерных средств ввода носит исключительно примерный характер, и подобным образом можно использовать другие средства ввода для манипулирования ползунками 210, 220 и 230. Также виртуальные элементы 200 управления интерфейсом в качестве альтернативы можно графически представить, например, в виде круговой шкалы (не показана) или другого графического изображения. В дополнение к этому, как показано на фиг.2, в зонах 205, 207 и 209 слева от ползунков 210, 220 и 230 коэффициенты фильтра или отношения, выбранные ползунками 210, 220 и 230, могут быть отображены в цифровой форме, а кнопки 214 и 216, показанные в зоне 212 дисплея 120, можно использовать для применения текущих настроек или сброса текущих настроек фильтра 20 опережения-запаздывания.
Подходящие значения коэффициента 205 времени запаздывания фильтра включают 0,00 (что приводит к обходу фильтра) и значения в диапазоне от 0,10 до 10,00 секунд. Предпочтительно диапазон коэффициентов 205 времени запаздывания фильтра показан в логарифмической шкале на графике 130 дисплея 120, поскольку большинство коэффициентов времени запаздывания фильтра выбраны в диапазоне от 0,10 до 2,00 секунды.
Подходящие значения отношения времени опережения к времени запаздывания в открывающем направлении 207 и отношения времени опережения к времени запаздывания в закрывающем направлении 209 лежат в диапазоне от 0,0 до 2,0 и показаны в линейной шкале на дисплее 120.
Как показано на фиг.2, ползунок 210 регулирует время запаздывания, которое определяет скорость затухания отклика фильтра. Чем больше время запаздывания, тем медленнее входной фильтр 20 опережения-запаздывания приводит выход к опорному сигналу 10. Ползунок 220 на фиг.2 регулирует отношение времени опережения к времени запаздывания в открывающем направлении. Ползунок 230 на фиг.2 регулирует отношение времени опережения к времени запаздывания в закрывающем направлении. Это отношение определяет начальный отклик входного фильтра 20 опережения-запаздывания. Как указано выше, фильтр 20 опережения-запаздывания обычно конфигурируется так, чтобы обеспечить импульс большой амплитуды, но короткой длительности в уставке 50 хода, что позволяет клапану 60 двигаться меньшими шагами. Большая скорость затухания (что соответствует малому времени задержки) также смягчает перескок для больших шагов, поскольку клапан 60 имеет тенденцию поворачиваться, позволяя отклику фильтра затухнуть полностью прежде, чем клапан 60 приблизится к уставке.
В дополнение график 150 отклика фильтра (фиг.2) предоставляет оператору или технику возможность предсказывать или наблюдать отклик фильтра, когда выбраны конкретные установки для различных параметров, регулируемых пользователем, таких как время запаздывания и отношение времени запаздывания к времени опережения. График 150 отклика фильтра на фиг.2 иллюстрирует предсказанный отклик фильтра 20 опережения-запаздывания на единичное ступенчатое изменение, прежде чем изменения параметров будут применены к фильтру 20 опережения-запаздывания, предоставляя тем самым оператору или технику возможность видеть графическое представление предсказанного отклика фильтра до того, как динамика системы управления будет действительно установлена. Таким образом, существует виртуальное отношение опережения к запаздыванию, которым может управлять оператор для того, чтобы сгенерировать предсказанный отклик параметра процесса, подлежащего управлению или настройке, и этот предсказанный отклик показывается на дисплее, связанном с пользовательским интерфейсом 107. Сходный график 155 отклика фильтра на фиг.3 показывает отклик, когда входной фильтр 20 опережения-задержки выключен или не задействован.
В дополнение к этому оператор может использовать кнопки выбора в зоне 228 дисплея 120 пользовательского интерфейса на фиг.2 для конфигурации фильтра 20 опережения-запаздывания таким образом, чтобы его выключить или не задействовать, чтобы регулировать только запаздывание отклика, чтобы регулировать или выбирать как запаздывание, так и отношение опережение/запаздывание отклика фильтра, или чтобы задействовать асимметричные отношения опережение/запаздывание, т.е. те, где присутствует ненулевой коэффициент времени запаздывания, а коэффициенты отношения времени опережения к времени запаздывания в открывающем направлении отличаются от отношения времени опережения к времени запаздывания в закрывающем направлении. Когда коэффициент времени запаздывания равен нулю и наличествуют ненулевые, но идентичные коэффициенты отношения времени опережения к времени запаздывания, динамика опережение-запаздывание является симметричной.
Посредством записи собранных и предсказанных данных, показываемых на графиках 130, 150, в буфер или оперативную память, подключенную к компьютеру или содержащуюся в нем, графики 130, 150 можно остановить в паузе, перемотать, воспроизвести еще раз по усмотрению оператора или техника или для последующего контроля качества, эффективности и оптимизации, с образовательными, инспекционными и с другими целями.
Механизмами управления, такими как графически отображенные кнопки 310, 315, 320 и ползунок 330, показанными в верхней части дисплея 120 пользовательского интерфейса 107, можно управлять с помощью соответствующего компьютерного устройства ввода, вроде тех, что перечислены выше, для управления периодом ожидания или задержкой между предсказанным откликом, изображенном на графике 150 отклика фильтра, и реальным применением настроек для воздействия на реальную регулировку динамики системы управления. В случае, когда при управлении одним или несколькими виртуальными элементами 200 управления интерфейсом оператор определил, что предсказанный отклик на конкретную регулировку или набор регулировок коэффициентов настройки ведет к нежелательному результату, оператор может управлять графически отображенными кнопками 310, 315, 320 или ползунком 330 для увеличения периода ожидания и повторно регулировать таким образом коэффициенты настройки до тех пор, пока на графике 150 отклика фильтра не будет отображен желаемый результат, предотвращая тем самым нежелательный результат в реальной системе управления.
Другие операции, такие как печатание, можно выполнить посредством соответствующего выбора оператором или техником других графически отображенных кнопок 335, 340, 345, 350, 355, 360 на дисплее 120.
Пользовательский интерфейс позволяет применить сигнал возбуждения для настройки клапана 60 внешним образом (т.е. посредством распределенной системы управления) или «изнутри» с помощью компьютерной программы, такой как ValveLink, сконфигурированной так, чтобы посылать цифровые шаговые команды в устройство позиционирования. Используя внешний сигнал возбуждения, пользователь манипулирует входным сигналом величиной 4-20 мА, и клапан реагирует соответствующим образом. Дополнительно фильтр 20 опережения-запаздывания может быть реализован либо напрямую в устройстве, таком как устройство позиционирования клапана, либо в распределенной системе управления, соединенной с устройством, например, в контроллере. Вообще говоря, фильтр 20 опережения-запаздывания может быть реализован как цифровая управляющая программа или процедура, записанная в компьютерной памяти и выполняемая на процессоре, но может быть также реализован как аналоговый фильтр.
Пользовательский интерфейс 107 может быть снабжен дополнительным экраном, который позволит пользователю без труда выбирать внешний или внутренний сигнал возбуждения. Когда выбран внешний сигнал возбуждения, регулировка оператором регулируемых элементов интерфейса меняет, по меньшей мере, один коэффициент настройки, относящийся к фильтру опережения-запаздывания, чтобы вызвать модификации в опорном сигнале управления. При выборе внутреннего сигнала возбуждения регулируемые элементы интерфейса, по меньшей мере, частично отключены, так что отключенные элементы интерфейса больше не видоизменяют коэффициенты настройки, относящиеся к фильтру опережения-запаздывания. Вместо этого коэффициенты настройки фильтра опережения-запаздывания модифицируются под влиянием контроллера, содержащего программирование, приспособленное вызывать заранее определенные модификации опорного сигнала управления.
Например, как показано на фиг.4, предусмотрено меню, из которого пользователь может выбрать либо «Внешний сигнал возбуждения», либо «Сигнал возбуждения ValveLink (прямоугольный сигнал)», что нужно понимать как внутренний сигнал возбуждения. Выбор внутреннего сигнала возбуждения дает возможность пользователю ввести значения в поля ввода данных «Номинальная уставка (%)», «Величина ступеньки (%)» и «Время удержания ступеньки (сек)».
Когда выбран «Внешний сигнал возбуждения», эти поля ввода данных становятся недоступны. При выборе внутреннего сигнала возбуждения программа может быть сконфигурирована так, чтобы автоматически ввести в поля ввода данных исходные значения по умолчанию, как, например, следующие:
ЗНАЧЕНИЯ ПОЛЕЙ ВВОДА ПО УМОЛЧАНИЮ
На фиг.5 показана схема, отображающая результаты, производимые и отображаемые на пользовательском интерфейсе, в зависимости от того, внешний или внутренний сигнал возбуждения выбран. Предупреждающие сообщения или другие уведомления предпочтительно показываются перед началом работы клапана управления, напоминая пользователю о том, что в случае выбора внешнего сигнала возбуждения клапан будет следовать за уставкой, а в случае выбора внутреннего сигнала возбуждения, внутренний сигнал возбуждения вызовет движение клапана. При выборе внутреннего сигнала возбуждения значение уставки предпочтительно приближается к значению, введенному для номинальной уставки со скоростью 10% в секунду, прежде чем будет инициирована последовательность шагов.
На фиг.6 показана схема, отображающая состояние различных элементов ввода пользовательского интерфейса в ответ на конкретный выбор типа фильтра. Например, когда выбран асимметричный фильтр опережения-запаздывания, пользовательский интерфейс конфигурируется так, чтобы задействовать элемент пользовательского интерфейса, управляющий временем запаздывания. Пользовательский интерфейс также конфигурируется так, чтобы задействовать элемент пользовательского интерфейса, управляющий отношением опережение/запаздывание открытия и отношением опережение/запаздывание закрытия. Наоборот, если выбран симметричный или простой фильтр опережения-запаздывания, то в поле ввода пользовательского интерфейса для отношения опережение/запаздывание открытия вводится начальное значение из базы данных, и пользовательский интерфейс конфигурируется так, чтобы задействовать элементы пользовательского интерфейса, управляющие временем задержки и отношением опережение/запаздывание открытия, а элемент пользовательского интерфейса для установки отношения опережение/запаздывание закрытия отключен.
Далее, как указано выше, фильтр 20 можно снабдить автоматическим сбросом динамики фильтра опережения-запаздывания для предохранения фильтра 20 от случайной активации выше или ниже отсечки. В частности, входной фильтр 20 опережения-запаздывания в некоторых ситуациях может иметь нежелательную возможность ударять затвор клапана 60 о седло или об ограничитель хода. Это является особенно сложной проблемой, поскольку устройства позиционирования обычно имеют встроенные отсечки хода, которые полностью насыщают преобразователь 80 «ток-давление», когда уставка приближается к 0% или к 100%. Для цифрового контроллера клапана Fisher DVC6000 проблема, связанная с использованием фильтров опережения-запаздывания у верхней и нижней границы диапазона клапана, избегается путем установления отсечек хода, используя значения по умолчанию 0,5% и 99,5%, что означает то, что если опорный сигнал или уставка падает ниже 0,5% или превышает 99,5%, сервоконтроллер обходится и преобразователь 80 «ток-давление» либо насыщается при полной подаче, либо стравливается в атмосферу, в зависимости от требуемого состояния насыщения. В результате во время нормальной дроссельной работы входной фильтр 20 опережения-запаздывания не должен достигать отсечки.
Компьютерный программный псевдокод, представленный ниже, демонстрирует пример реализации кода компьютерной программы, которая может использоваться для того, чтобы гарантировать, что контроллер, связанный с фильтром, либо реализующий входной фильтр 20 опережения-запаздывания, предотвращает достижение отсечки. В данном случае входной фильтр 20 опережения-запаздывания обходится, и динамика сбрасывается, если выход фильтра 20 превышает предварительно определенный порог, близкий к значению отсечки, такой как 0,5% или 99,5%, хотя также можно использовать другие значения.
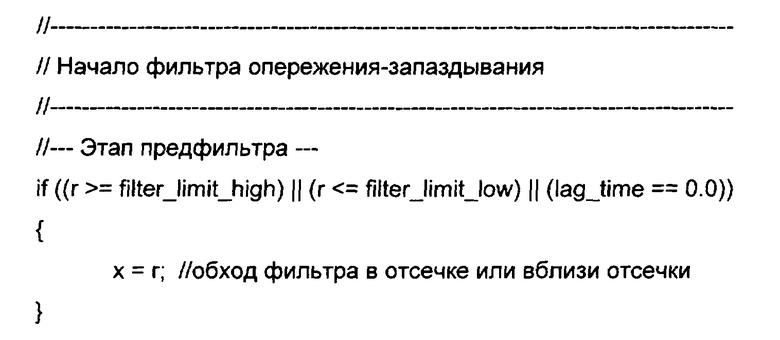
В одном варианте осуществления входной фильтр 20 опережения-запаздывания может быть реализован с четырьмя состояниями или этапами исполнения, включающими этап предфильтра, этап фильтра, этап после фильтра и этап исходного состояния. На этапе предфильтра фильтр 20 производит проверку, превышает ли опорный сигнал 10 предварительно определенный верхний предел, падает ли ниже предварительно определенного нижнего предела или фильтр 20 полностью выключен. Когда опорный сигнал 10 превышает предварительно определенный верхний предел или падает ниже предварительно определенного нижнего предела (или фильтр 20 выключается или отключается посредством пользовательского интерфейса 107), входной фильтр 20 опережения-запаздывания опускает обработку опорного сигнала и вместо этого подает опорный сигнал 10 непосредственно на вход 30 сервоконтура. Как указано выше, предварительно определенные верхний и нижний предел преимущественно устанавливаются так, что выходной сигнал фильтра 20 не будет достигать отсечки или ударять в упор в приводе.
Следующий компьютерный программный псевдокод демонстрирует один из способов, которым контроллер, соединенный с входным фильтром 20 опережения-запаздывания, можно запрограммировать так, чтобы установить верхний и нижний предел фильтра в желаемые пороговые уровни:
Filter_limit_high=min((ivp_cutoff_high - high_cutoff_deadband),
(100% - high_cutoff_deadband))
Filter_limit_low=max((ivp_cutoff_low + low_cutoff_deadband),
(0% + low_cutoff_deadband))
Эти пределы можно вычислить в программе, "зашитой" в устройство, и вычислять их каждый раз, когда изменяются значения входных характеристик, нижней отсечки хода или верхней отсечки хода. Более того, поскольку алгоритм обработки предела является нисходящим, эти пределы проходят обратную характеристику (векторы данных Х и Y обращаются), так что характеризуемые пределы получаются ниже значений отсечки.
На этапе фильтра входной фильтр 20 опережения-запаздывания работает как стандартный фильтр дискретного времени. Вообще говоря, можно представить, что входной фильтр 20 опережения-задержки имеет два коэффициента: «а» и «b». Коэффициент «а» является коэффициентом вклада запаздывания, а коэффициент «b» - это коэффициент отношения времени опережения к времени запаздывания, что можно выразить в виде формулы как τ lead/τ lag. Чтобы предупредить входной фильтр 20 опережения-запаздывания от достижения отсечки или ударов в упор хода, выход фильтра 20 предпочтительно сбрасывают до верхнего и нижнего значений, используемых на этапе предфильтра. Во время стадии или состояния фильтра, фильтр 20 применяет коэффициенты (отношения) фильтра к опорному сигналу любым известным или желаемым способом для создания прошедшего фильтр входного сигнала сервоконтура.
Во время этапа после фильтра предыдущие значения, использованные в вычислениях фильтра, обновляются на основе новых входных данных из пользовательского интерфейса или из сервоконтура. Наконец, во время этапа исходного состояния, который происходит, например, когда прибор начинает работать, исходное состояние входного фильтра 20 устанавливается в действующее входное опорное значение. Разумеется, чтобы обеспечить инверсную динамику для нелинейностей в пневматике, коэффициенты фильтра могут регулироваться раздельно для открывающего направления и для закрывающего направления клапана 60 управления.
В предпочтительном варианте осуществления результат входного фильтра опережения-запаздывания, т.е. действие входного фильтра 20 опережения-запаздывания на уставку или входной сигнал клапана, дается формулой:
(τ1s+1)/(τ2s+1)
Посредством регулировки значений τ1 и τ2 отношение изменяется, воздействуя на чистое запаздывание, чистое опережение или какую-либо комбинацию опережения и запаздывания. В применении к клапану управления результирующее отношение коррелирует с величиной перескока, который будет обеспечивать фильтр опережения-запаздывания. Таким образом, в различных сценариях работы клапана оператор может использовать пользовательский интерфейс 107 для регулировки отношения с целью достичь желаемых изменений. Например, если желательно, чтобы входной фильтр 20 опережения-запаздывания обеспечил чистое запаздывание, то τ1s устанавливается равным нулю, что приводит к результату 1/(τ2s+1). В управляющем контуре, когда входным фильтром 20 опережения-запаздывания генерируется чистое запаздывание, ошибка сводится к нулю. Как результат, положение штока клапана управления, с которым работает входной фильтр 20 или другая управляемая переменная процесса, подлежащего регулированию, будет сдвигаться к уставке 50 хода.
Если желательно, чтобы входной фильтр 20 производил чистое опережение, то τ2s устанавливается равным нулю, что ведет к результату (τ1s+1)/1. В управляющем контуре это производит упреждающее управление посредством коррекции ошибки до ее возникновения. При построении графика оператор пользовательского интерфейса 107 мог бы наблюдать положительную фазу в отношении управляемого элемента.
Пока отношение опережение-запаздывание больше 1.0, будет преобладать начальный отклик опережения. Если отношение опережение-запаздывание равно 2, имеется начальный опережающий отклик 2.0, что влечет за собой то, что любая коррекция положения штока или стержня клапана управления будет существенно уменьшена, прежде чем ошибка распространится по схеме управления; который будет затем постепенно сдвигать положение штока клапана управления или другую управляемую переменную процесса к уставке 50 хода. Если отношение опережение-запаздывание менее 1.0, то будет доминировать коррекция запаздывания.
Посредством понимания изменений функционирования в различных сценариях работы клапанов, проистекающих из различных возможных отношений опережение-запаздывание, оператор может легко стать экспертом в области точной настройки параметров процессов и корректирования ошибок и может легко оптимизировать функционирование клапана управления.
Следует понимать, что могут быть выгодно предоставлены дополнительные компоненты, которые получат преимущества от использования фильтра 20 опережения-запаздывания. Например, могут быть предусмотрены компоненты с положительной обратной связью, которые выполнены с возможностью отклика на данные, включая опорный сигнал 10, скорость опорного сигнала 10 и ускорение опорного сигнала 10.
Дисплей 120 пользовательского интерфейса 107 предпочтительно доступен через один или более экранов меню, такого как ниспадающее меню с заголовком «Настройка прибора», как показано на фиг.7. Экран (экраны) меню преимущественно предусматривают адекватную индикацию для информирования пользователя, что контур клапана управления может быть настроен удаленно. Например, опция меню на фиг.5 называется «Удаленная настройка». При выборе этой опции, пользователь может выбрать «Улучшенный стабилизированный/оптимизированный входной фильтр опережения-запаздывания».
Входной фильтр 20 опережения-запаздывания может быть реализован в любом количестве сервоконтуров различного типа. Таким образом, хотя входной фильтр 20 опережения-запаздывания показан на фиг.1 как используемый в одном типе электропневматической системы управления, содержащей сервоконтроллер с большим усилением и замкнутым контуром, который используется для установки позиций штоков или стержней клапанов управления, этот фильтр может использоваться также и в других системах управления или управляющих контурах. Например, другим приложением, в котором будет эффективен фильтр опережения-запаздывания, связанный с уставкой, является использование в комбинации с шаровыми клапанами, где скручивание стержня между приводом и затворов вносит зону нечувствительности в управление потоком. Скручивание стержня может быть преодолено короткой перегрузкой привода, позволяя шару сдвинуться в нужное положение. Поскольку такая схема относится к открытому контуру, отклик не будет совершенным, но значительно лучшим, чем отклик, получаемый без фильтра опережения-запаздывания.
Далее, существуют различные технологии достижения улучшенных характеристик путем привода сервоприводов к уставке быстрее по сравнению с результатами, обычно получаемыми только компенсацией замкнутого контура, без изменения динамики замкнутого контура. Добавление контроллера с обратной связью фильтром опережения-запаздывания по уставке является одной из таких технологий, тогда как другие технологии используют добавление контроллера с элементами положительной обратной связи по скорости уставки. Фильтр опережения-запаздывания может использоваться и в этих ситуациях тоже.
Технология, в которой контроллер с обратной связью дополнен входным фильтром опережения-запаздывания, является особенно полезной в приложениях, в которых используются дополнительные элементы, увеличивающие скорость хода привода, такие как объемные бустеры и клапаны с быстрым выпуском. С целью компенсации медленной динамики при изменениях малой амплитуды фильтр опережения-запаздывания может использоваться для перегрузки уставки в течение малого промежутка времени так, чтобы задействовать объемные бустеры даже при меньших амплитудах, таких, что стандартные объемные бустеры не могли бы быть эффективно задействованы ввиду малых зон нечувствительности.
Хотя фильтр 20 опережения-запаздывания может быть реализован желаемым образом, включая реализацию в качестве программы, и во встроенном программном обеспечении или в аппаратной части, в случае реализации в качестве программы описываемые здесь программные компоненты могут быть сохранены в любой читаемой компьютером памяти, например, на магнитном диске, лазерном диске или другом носителе информации, в ОЗУ или ПЗУ компьютера или процессора, такого как специализированная интегральная схема (ASIC, application specific integrated circuit), стандартный многоцелевой процессор (CPU) или другое аппаратное устройство. Подобным образом программа может быть предоставлена пользователю или системе контроля процесса посредством любого известного или желаемого способа доставки, например, на компьютерном диске или другом транспортабельном компьютерном средстве хранения или посредством коммуникационного канала, такого как телефонная линия, Интернет и т.д. (рассматриваемый как аналогичный или взаимозаменяемый с предоставлением программного обеспечения на транспортабельном носителе информации).
Одним из способов заставить затвор клапана двигаться быстрее относительно седла к уставке в ответ на входной сигнал с малой амплитудой, является перегрузка входного сигнала управления или уставки сервопривода, когда клапан находится в процессе перехода от состояния отсечки в активное дроссельное управление. Функция переключения может быть использована для переключения из одного состояния отсечки в другое на короткое время, которое обычно составляет меньше одной секунды, например, 50 мс, чтобы перегрузить сервопривод во время перехода. Как показано на фиг.8, переключение для быстрого перехода из отсечки 0% до 100% или из отсечки 100% до 0% может быть реализовано посредством управления механизмом «ток/давление» (I/P drive) непосредственно посредством функции 95 переключения, напрямую соединенной с цепью механизма «ток/давление» либо посредством управления механизмом «ток/давление» косвенно через функцию 96 переключения в цепи усиления в прямом направлении, как показано на фиг.9. Специалист в данной области может понять, что функцию переключения можно реализовать в системе управления с фильтром или без фильтра опережения-запаздывания на входе сервопривода.
Однако такая функция переключения требует относительно большого дополнительного программного обеспечения для реализации и дополнительной защитной логики для предотвращения «дребезга» или быстрых нежелательных отклонений при переключении. Как описано ниже, входной фильтр опережения-запаздывания, установленный перед контуром обратной связи устройства позиционирования, с изменяемыми пользователем входными состояниями, предлагает альтернативное решение, которое использует значительно меньше системной памяти, нежели вышеупомянутая функция переключения.
Как альтернатива использованию функции переключения для перегрузки сервопривода, например, в системе управления компрессором, в которой противопомпажный клапан должен быстро подниматься из седла в ответ на сигналы малой амплитуды, такой же эффект можно получить посредством установки исходного состояния на входе фильтра опережения-запаздывания по настоящему изобретению отличающегося от начального состояния на выходе фильтра опережения-запаздывания. С целью установки исходного состояния на входе отличающимся от исходного состояния на выходе фильтра опережения-запаздывания исходное состояние динамики числителя устанавливается отличающимся от исходного состояния динамики знаменателя. Эффект состоит в том, что создается «импульс» или кратковременное отклонение в уставке хода, что имеет желаемый результат, быстро снимая клапан из седла.
Фиг.11 показывает пример перегруженной уставки в области перехода из отсечки в состояние активного управления, когда командный сигнал сервопривода перегружен установкой исходного состояния входного фильтра опережения-запаздывания в соответствии с настоящим описанием. Фиг.10 иллюстрирует типичный отклик привода большого объема на изменения уставки малой амплитуды из состояния отсечки. В примере, показанном на фиг.10, была задержка более 2 минут перед тем, как клапан достиг уставки хода. Для сравнения, на фиг.11 клапан достиг уставки хода почти мгновенно. Специалист в данной области поймет, что абсолютное время сдвига затвора клапана из седла пропорционально объему привода. То есть даже в настоящей примерной реализации искусственные состояния, которые моментально перегружают вход сервопривода, могут привести к тому, что время движения затвора клапана достигает двух минут для приводов большого объема. В данном случае, традиционные системы могут потребовать еще несколько минут сверх этого времени.
Нужно понимать, что входной фильтр опережения-запаздывания может быть выражен как:
x[k]=а*х[k-1]+b*r[k]+(1-b-a)*r[k-1]
где:
x[k] = выход фильтра для индекса k
r[k] = вход фильтра для индекса k
а=exp(-Ts/tau_lag)
b=tau_lead/tau_lag
Ts = примерное время сервопривода
tau_lag = константа времени запаздывания (может определяться пользователем)
tau_lead = константа времени опережения (может определяться пользователем)
Когда клапан находится на седле, значение x[k-1] устанавливается равным 0% и значение r[k-1] тоже устанавливается равным 0%. Ручной установкой значения r[k-1] в искусственно низкое исходное состояние ниже 0%, например -10%, когда клапан находится в состоянии отсечки, разница между r[k] (т.е. входом фильтра) и r[k-1] становится больше нормальной. То есть, если r[k-1] равно 0% и исходное состояние опережения-запаздывания установлено -10%, то ступенчатое изменение на 2% произведет относительное изменение на +12% на выходе фильтра. Эта увеличенная разница приводит к перегрузке выхода фильтра x[k]. В качестве альтернативы, если значение x[k-1] равно 100%, то значение r[k-1] можно установить искусственно высоким исходным состоянием, таким как 110%, так что ступенчатое изменение к 98% привело бы к изменению -12% на выходе фильтра. По существу, в случае активных отсечек фильтр опережения-запаздывания инициализируется таким образом, что малые изменения в командных сигналах интерпретируются как мгновенные большие изменения на выходе, что имеет результатом импульс в сигнале механизма «ток-давление», который сдвигает клапан из седла клапана и ведет клапан по направлению к уставке тем же образом, что и в случае использования функции переключения.
При регулировке исходного состояния на входе фильтра опережения-запаздывания можно использовать регулируемый элемент управления, относящийся к пользовательскому интерфейсу. Например, пользовательский интерфейс может быть снабжен переменным, выбираемым пользователем уровнем, на который можно установить исходное состояние на входе фильтра опережения-запаздывания. Первый выбираемый пользователем уровень регулировки, имеющий обозначение «низкое усиление опережения-запаздывания», может соответствовать малому отрицательному значению, такому как -2%. Промежуточный выбираемый пользователем уровень, имеющий обозначение «среднее усиление опережения-запаздывания», может соответствовать относительно большему отрицательному значению, такому как -10%. Третий выбираемый пользователем уровень, имеющий обозначение «большое усиление опережения-запаздывания», может соответствовать относительно даже еще большему отрицательному значению, такому как -15%.
Хотя выше были описаны конкретные варианты осуществления, рамки изобретения не ограничены данными конкретными вариантами осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВХОДНОЙ ФИЛЬТР ОПЕРЕЖЕНИЯ-ЗАПАЗДЫВАНИЯ ДЛЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО УПРАВЛЯЮЩЕГО КОНТУРА | 2005 |
|
RU2377629C2 |
| СПОСОБ И УСТРОЙСТВО С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ УПРАВЛЯЮЩЕЙ СИСТЕМЫ | 2005 |
|
RU2393369C2 |
| Система и способ для обнаружения износа регулирующего клапана | 2018 |
|
RU2745235C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕГУЛИРУЮЩИМ КЛАПАНОМ ПОСРЕДСТВОМ ЦЕПИ УПРАВЛЕНИЯ, А ТАКЖЕ ДЛЯ ВЫЯВЛЕНИЯ НЕИСПРАВНОСТЕЙ В ЭТОЙ ЦЕПИ | 2005 |
|
RU2378678C2 |
| ПЕРЕХОД К ЗАКРЫТИЮ ДЛЯ ПОЗИЦИОНЕРОВ КЛАПАНОВ УПРАВЛЕНИЯ | 2015 |
|
RU2695468C2 |
| УНИВЕРСАЛЬНЫЙ КОНТРОЛЛЕР ДЛЯ УСТРОЙСТВА АВАРИЙНОГО ЗАКРЫТИЯ | 2006 |
|
RU2413115C2 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| СИСТЕМА НА ОПТИЧЕСКИХ ДИСКАХ | 1996 |
|
RU2181217C2 |
| СВЕТОДИОДНАЯ ОСВЕТИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2697831C2 |
| АНАЛИЗ ВРЕМЕННЫХ РЯДОВ ДЛЯ ОЦЕНКИ ИСПРАВНОСТИ РЕГУЛИРУЮЩЕГО КЛАПАНА | 2017 |
|
RU2745514C2 |

Системы и способ предназначены для вывода затвора клапана из седла клапана. Система содержит управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; фильтр опережения-запаздывания, связанный с входом управляющего контура, причем на вход управляющего контура подается кратковременный опорный сигнал управления для перегрузки входного сигнала управления в цепи усиления в прямом направлении управляющего контура или в преобразователе «ток-давление» с получением выходного сигнала, побуждающего движение затвора клапана. Регулируемые, устанавливаемые пользователем входные параметры на входе фильтра опережения-запаздывания, связанного со входом управляющего контура, способствуют достижению настраиваемого отклика клапана управления при входе малой амплитуды. Технический результат - улучшение функционирования клапанов управления. 4 н. и 16 з.п. ф-лы, 11 ил.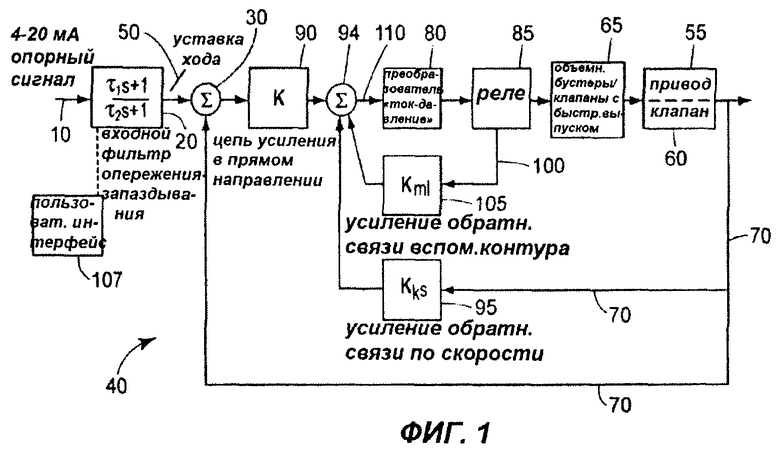
1. Система для вывода затвора клапана из седла клапана управления, содержащая управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; фильтр опережения-запаздывания, связанный с входом управляющего контура, причем на вход управляющего контура подается кратковременный опорный сигнал управления для перегрузки входного сигнала управления в цепи усиления в прямом направлении управляющего контура или в преобразователе «ток-давление» с получением выходного сигнала, побуждающего движение затвора клапана.
2. Система по п.1, отличающаяся тем, что фильтр опережения-запаздывания включает программирование для управления исходным состоянием фильтра опережения-запаздывания.
3. Система по п.1, отличающаяся тем, что кратковременный опорный сигнал генерируется функцией переключения, обеспечивающей искусственный управляющий сигнал в течение предварительно заданного промежутка времени.
4. Система по п,1, отличающаяся тем, что программирование фильтра опережения-запаздывания принимает, по меньшей мере, одно искусственное исходное состояние и в ответ на указанное, по меньшей мере, одно искусственное исходное состояние выдает выходной сигнал, компенсирующий разницу между искусственным исходным состоянием и ожидаемым исходным состоянием посредством усиления выходного сигнала.
5. Система для настройки отклика клапана управления, содержащая управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; фильтр опережения-запаздывания, связанный с входом управляющего контура; контроллер процесса, подающий опорный сигнал управления на вход фильтра опережения-запаздывания; и пользовательский интерфейс, связанный с фильтром опережения-запаздывания, причем пользовательский интерфейс включает, по меньшей мере, один регулируемый элемент интерфейса, при этом регулировка указанного элемента интерфейса или каждого из элементов интерфейса обеспечивает изменение, по меньшей мере, одного коэффициента настройки, относящегося к фильтру опережения-запаздывания, а пользовательский интерфейс включает изменяемый пользователем входной параметр для задания установки исходного состояния с получением усиленного выходного сигнала фильтра опережения-запаздывания в ответ на входной сигнал малой амплитуды.
6. Система по п.5, отличающаяся тем, что регулировка указанного, по меньшей мере, одного элемента интерфейса пользовательского интерфейса создает искусственное исходное состояние, а фильтр опережения-запаздывания включает программирование, которое обеспечивает компенсацию выходным сигналом разницы между искусственным исходным состоянием и ожидаемым исходным состоянием посредством усиления выходного сигнала.
7. Система по п.6, отличающаяся тем, что искусственное исходное состояние имеет отрицательное значение.
8. Система по п.6, отличающаяся тем, что изменяемый пользователем входной параметр выбран из множества предварительно определенных входных параметров.
9. Способ выведения затвора клапана из седла клапана управления, включающий подачу опорного сигнала управления на вход управляющего контура, включающего контроллер клапана, преобразователь «ток-давление», клапан управления, и привод клапана, связанный с затвором клапана управления; предоставление фильтра опережения-запаздывания в сочетании с сигналом управления; предоставление пользовательского интерфейса, связанного с фильтром опережения-запаздывания, причем указанный пользовательский интерфейс выполнен с возможностью содействия удаленному управлению отношением опережения к запаздыванию, производимым фильтром опережения-запаздывания; и управление выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя, для обеспечения требуемого уровня перемещения затвора клапана относительно седла клапана управления в ответ на входной сигнал малой амплитуды.
10. Способ по п.9, отличающийся тем, что при управлении выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя обеспечивают подачу искусственного исходного состояния на вход фильтра опережения-запаздывания регулируемым элементом интерфейса пользовательского интерфейса.
11. Способ по п.10, отличающийся тем, что регулируемый элемент интерфейса выполнен с возможностью выбора одного из множества доступных предварительно определенных искусственных исходных состояний для подачи на вход фильтра опережения-запаздывания.
12. Способ по п.10, отличающийся тем, что при подаче искусственного исходного состояния на вход фильтра опережения-запаздывания исполняют программирование, относящееся к фильтру опережения-запаздывания, которое выдает выходной сигнал фильтра опережения-запаздывания для компенсации разницы между искусственным исходным состоянием и ожидаемым исходным состоянием посредством усиления выходного сигнала.
13. Способ по п.10, отличающийся тем, что при подаче искусственного исходного состояния искусственное состояние соответствует отрицательному значению.
14. Способ по п.9, отличающийся тем, что при управлении выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя функция переключения задает исходное состояние уставки сервопривода, относящейся к клапану управления, в течение предварительно определенного промежутка времени.
15. Способ по п.14, отличающийся тем, что предварительно определенный промежуток времени составляет менее одной секунды.
16. Способ по п.14, отличающийся тем, что функция переключения обеспечивает максимальное возбуждение уставки сервопривода, относящейся к клапану управления.
17. Способ по п.9, отличающийся тем, что при управлении выходным сигналом фильтра опережения-запаздывания или преобразователя «ток-давление» или выходными сигналами указанного фильтра и преобразователя преобразователь «ток-давление» инициализируют в 0% в течение предварительно определенного промежутка времени, а затем приводят до номинального рабочего уровня.
18. Система для выведения затвора клапана из седла клапана управления, содержащая управляющий контур, включающий контроллер клапана, преобразователь «ток-давление», клапан управления и привод клапана, связанный с затвором клапана управления; переключатель, соединенный с цепью усиления в прямом направлении управляющего контура или преобразователем «ток-давление», при этом переключатель содержит программирование для управления искусственным опорным сигналом с получением выходного сигнала, побуждающего движение затвора клапана.
19. Система по п.18, отличающаяся тем, что программирование переключателя включает функцию переключения для обеспечения искусственного сигнала управления в течение предварительно определенного промежутка времени.
20. Система по п.18, отличающаяся тем, что переключатель предусмотрен на сумматоре, связанном с цепью усиления в прямом направлении управляющего контура или преобразователем «ток-давление».
| US 20010037670 A1, 08.11.2001 | |||
| EP 0869104 A1, 07.10.1998 | |||
| СЛЕДЯЩИЙ КЛАПАННЫЙ ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2188343C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2004 |
|
RU2255250C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |

