ОБЛАСТЬ ТЕХНИКИ
[0001] Это раскрытие в целом относится к системам управления процессами, а в особенности, к способам и устройствам для контроля и/или наблюдения за пневматическим приводом.
УРОВЕНЬ ТЕХНИКИ
[0002] Системы управления процессами, подобные тем, которые используются в химических, нефтяных или других процессах, как правило, содержат один или более производственных контроллеров, а также устройства ввода/вывода (I/O), коммуникативно соединение по меньшей мере с одним центральным компьютером или рабочей станцией оператора, и с одним или более полевых устройств или приборов через аналоговые, цифровые или комбинированные аналогово/цифровые шины, использующие любую требуемую коммуникационную среду (например, проводную, беспроводную и т.д.) и протоколы (например, Fieldbus, Profibus®, HART® и т.д.). Полевые устройства, которые могут быть, например, клапанами, клапанными позиционерами, переключателями и передатчиками (например, датчики температуры, давления и скорости расхода), выполняющими функции управления процессом в рамках процесса, такого как открытие или закрытие клапанов и измерение параметров управления процессом. Контроллеры принимают сигналы, отображающие обработку измерений, выполненных полевыми устройствами, обрабатывают эту информацию с целью реализации программы управления, и генерируют управляющие сигналы, которые посылаются по шинам или другим коммуникационным линиям к полевым устройствам для управления выполнением процесса. Таким образом, контроллеры могут выполнять и координировать управляющие стратегии или программы посредством полевых устройств с помощью шин и/или других коммуникационных каналов, коммуникативно связывающих полевые устройства.
[0003] Информация от полевых устройств и/или контроллера, как правило, доступна через магистральный канал передачи данных или через коммуникационную сеть с одним или более других компьютерных устройств, таких как рабочие станции оператора, персональные компьютеры, журналы данных, генераторы отчетов, централизованные базы данных и т.д. Такие устройства обычно расположены в диспетчерских комнатах и/или в других местах, размещенных удаленно относительно более тяжелого оборудования предприятия. Эти компьютерные устройства, например, запускают компьютерные приложения, которые позволяют оператору выполнять любую из множества функций по отношению к определенному процессу в системе управления процессом, таких, как просмотр текущего состояния процесса, изменение рабочего состояния, изменение настроек программы управления процессом, модификация функционирования производственных контроллеров и/или полевых устройств, просмотр аварийных сигналов, генерируемых полевыми устройствами и/или производственными контроллерами, симулируя выполнение процесса с целью профессиональной подготовки персонала и/или оценки процесса и т.д.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Раскрыты способы и устройство для контроля и/или управления пневматическим приводом. Пример устройства содержит процессор для выполнения управляющей программы, датчик положения для контроля положения клапана, присоединенного к пневматическому приводу, причем датчик положения предоставляет управляющей программе информацию о положении клапана, и бистабильный клапан, чтобы обеспечить подачу пневматического сигнала на привод, причем бистабильный клапан и пневматический сигнал контролируются с помощью управляющей программы на основе по меньшей мере одного из следующего: информации о положении или управляющего сигнала от отдельного устройства в системе управления процессом.
[0005] Представленный способ вовлекает обработку настроек управления с помощью процессора в устройстве управления, смонтированном на пневматическом приводе, соединенном с клапаном, причем устройство управления содержит датчик положения, осуществляющий контроль за положением клапана с помощью датчика положения, осуществляющий контроль за положением клапана с помощью датчика положения, и обеспечивает поступление пневматического сигнала с помощью устройства управления к приводу для перемещения клапана, причем пневматический сигнал устанавливается на основании настроек управления и контролируемого положении клапана.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
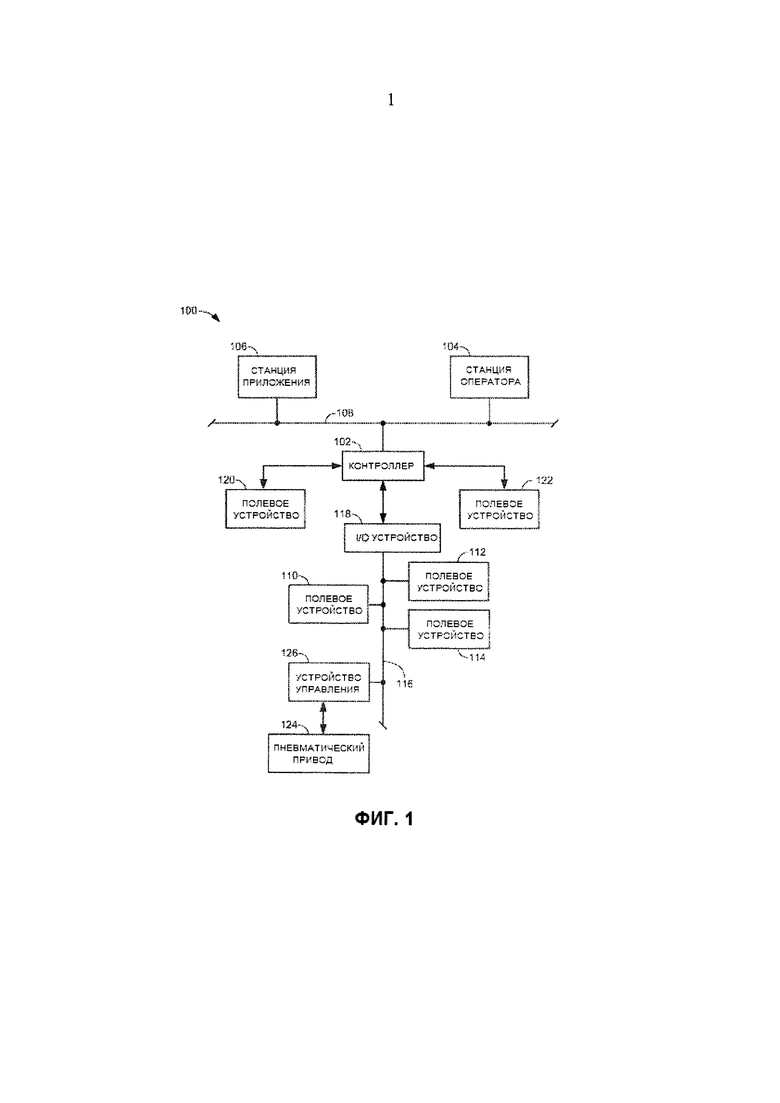
[0006] Фиг. 1 схематически иллюстрирует представленную систему управления процессом, в рамках которой может быть воплощена доктрина данного раскрытия.
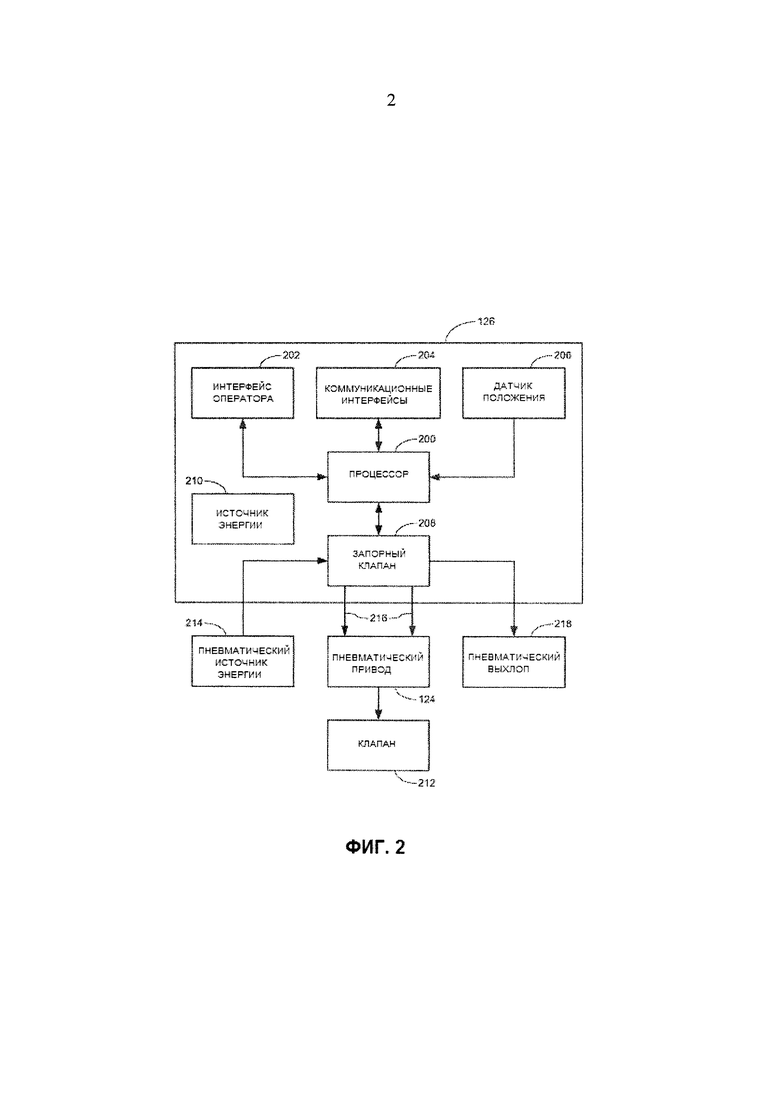
[0007] Фиг. 2 иллюстрирует пример способа реализации представленного устройства управления, проиллюстрированного на Фиг. 1.
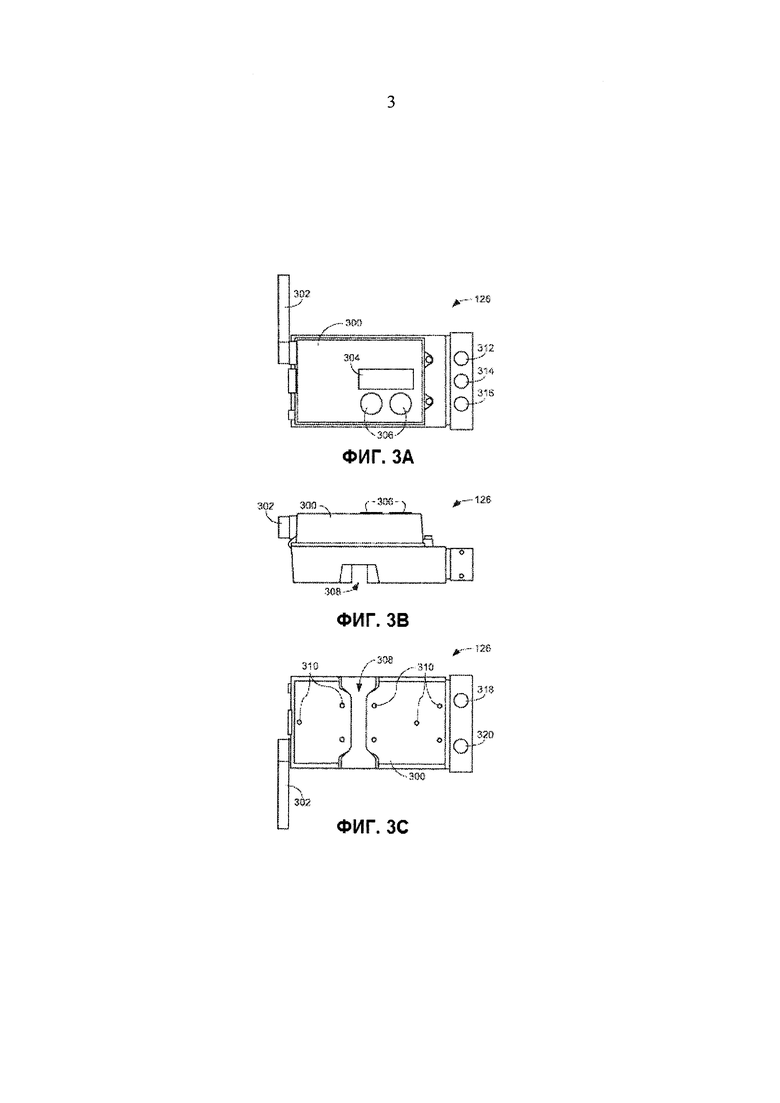
[0008] Фиг. 3А-3С иллюстрируют соответственно вид сверху, сбоку и снизу на представленное устройство управления, проиллюстрированное на Фиг. 2.
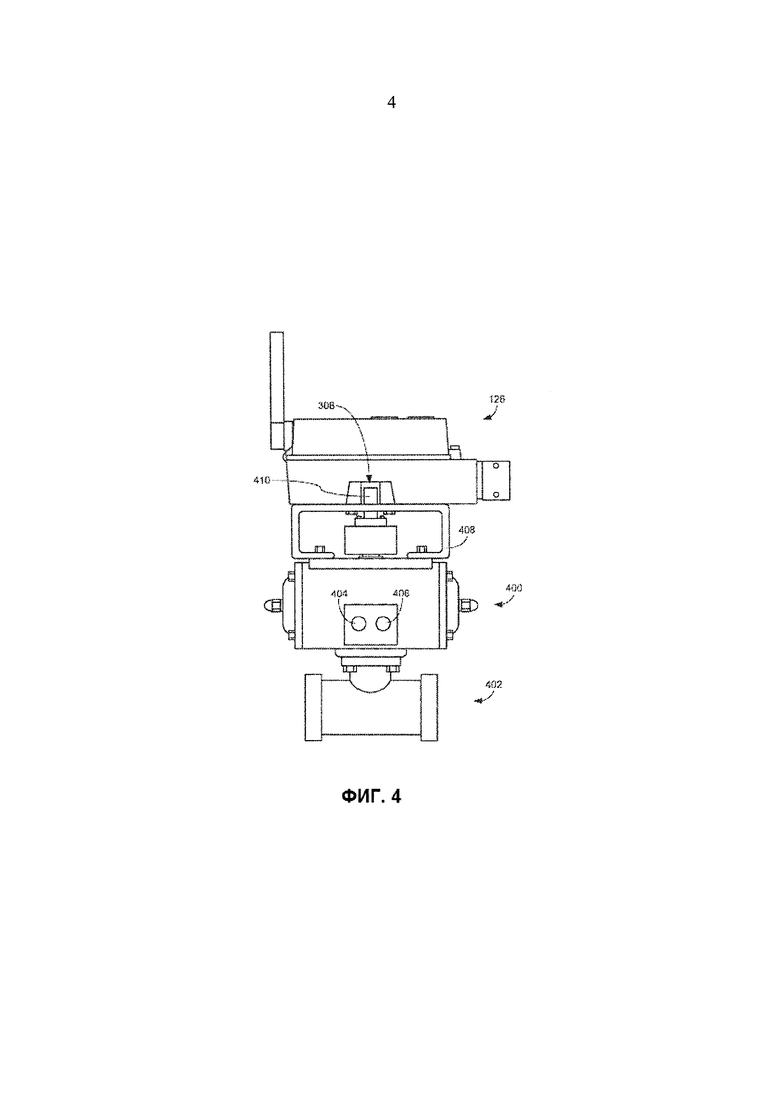
[0009] Фиг. 4 иллюстрирует представленное устройство управления, проиллюстрированное на Фиг. 3, установленное на поворотном приводе, соединенном с поворотным клапаном.
[0010] Фиг. 5А и 5В иллюстрируют соответственно вид сзади и сбоку представленного устройства управления, проиллюстрированного на Фиг. 3, смонтированного на линейном приводе, соединенном с линейным клапаном.
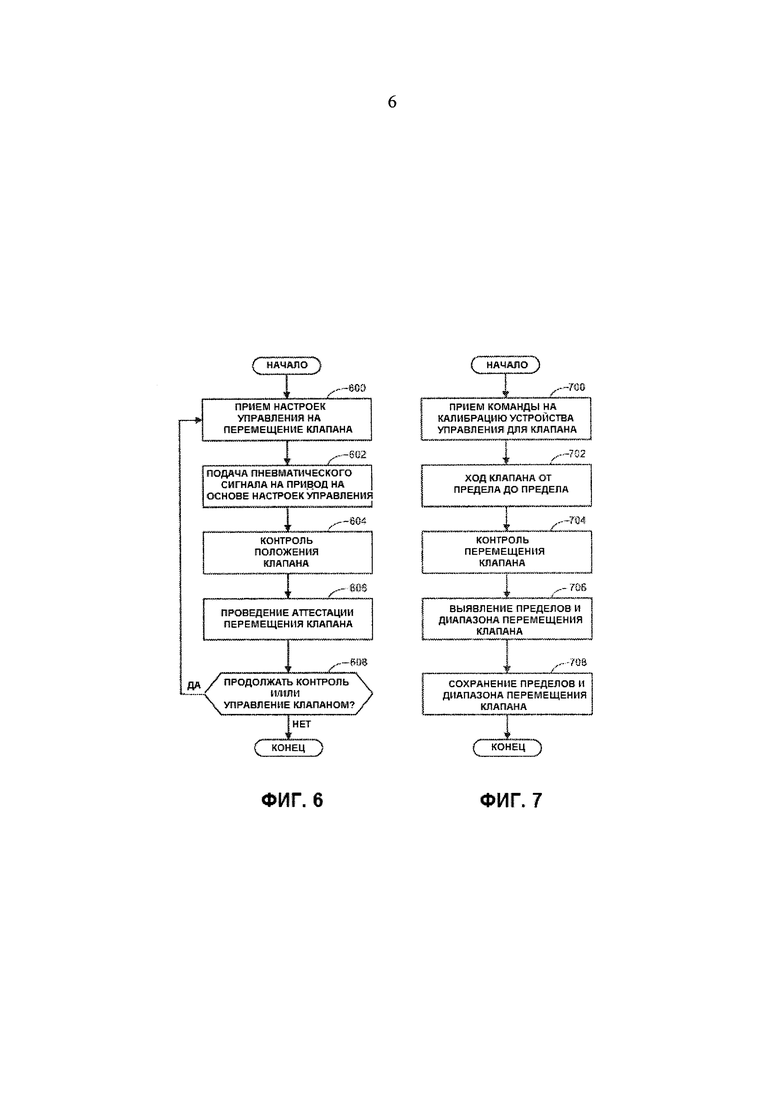
[0011] Фиг. 6 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, для контроля и/или наблюдения за пневматическим приводом.
[0012] Фиг. 7 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, откалиброванное для использования с конкретным клапаном.
[0013] Фиг. 8 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, для испытания перемещения клапана.
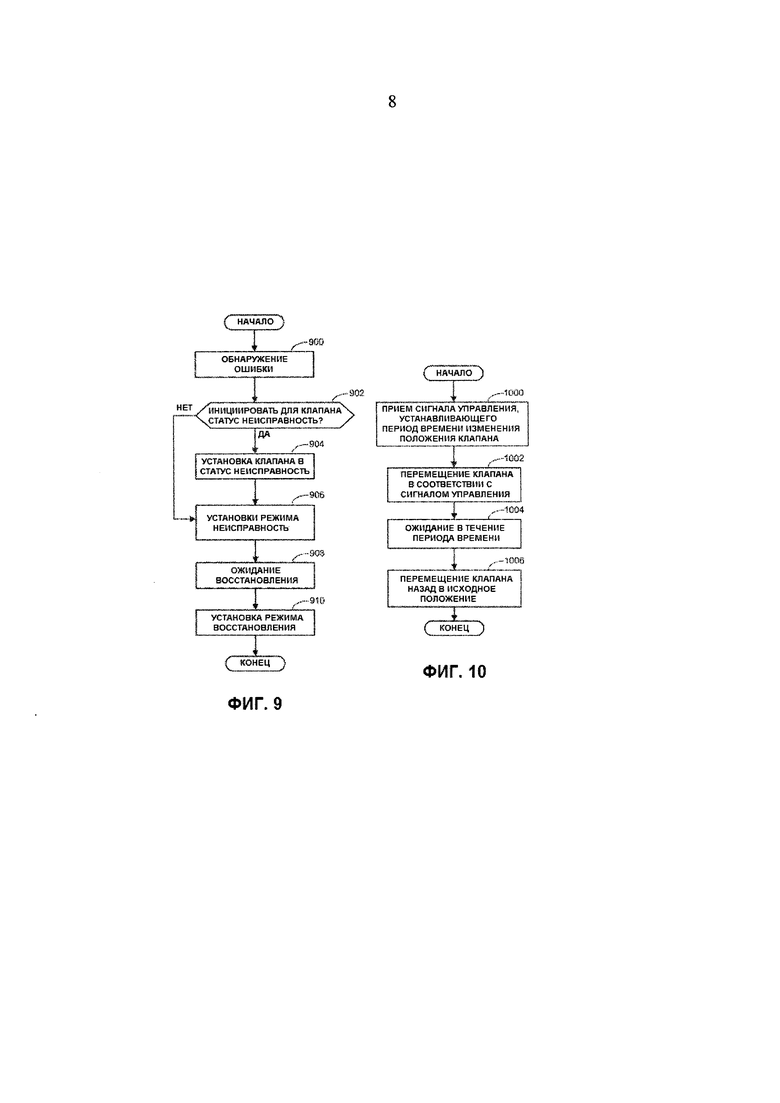
[0014] Фиг. 9 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, для выявления и реагирования на ошибку(и) в системе управления, связанное с клапаном.
[0015] Фиг. 10 является блок-схемой представленного процесса, следуя которой может быть реализовано представленного устройство управления, проиллюстрированное на Фиг. 2, для изменения положения клапана в течение заданного периода времени.
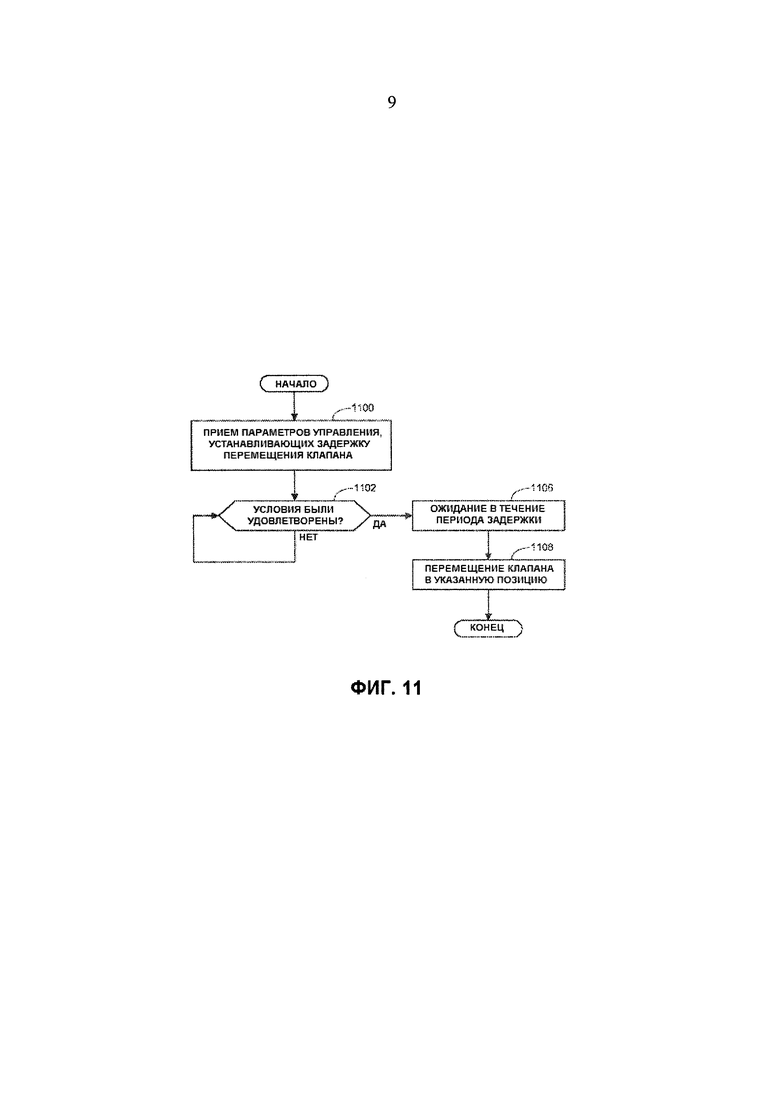
[0016] Фиг. 11 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, для задержки движения клапана.
[0017] Фиг. 12 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, для предоставления диагностической информации, связанной с клапаном.
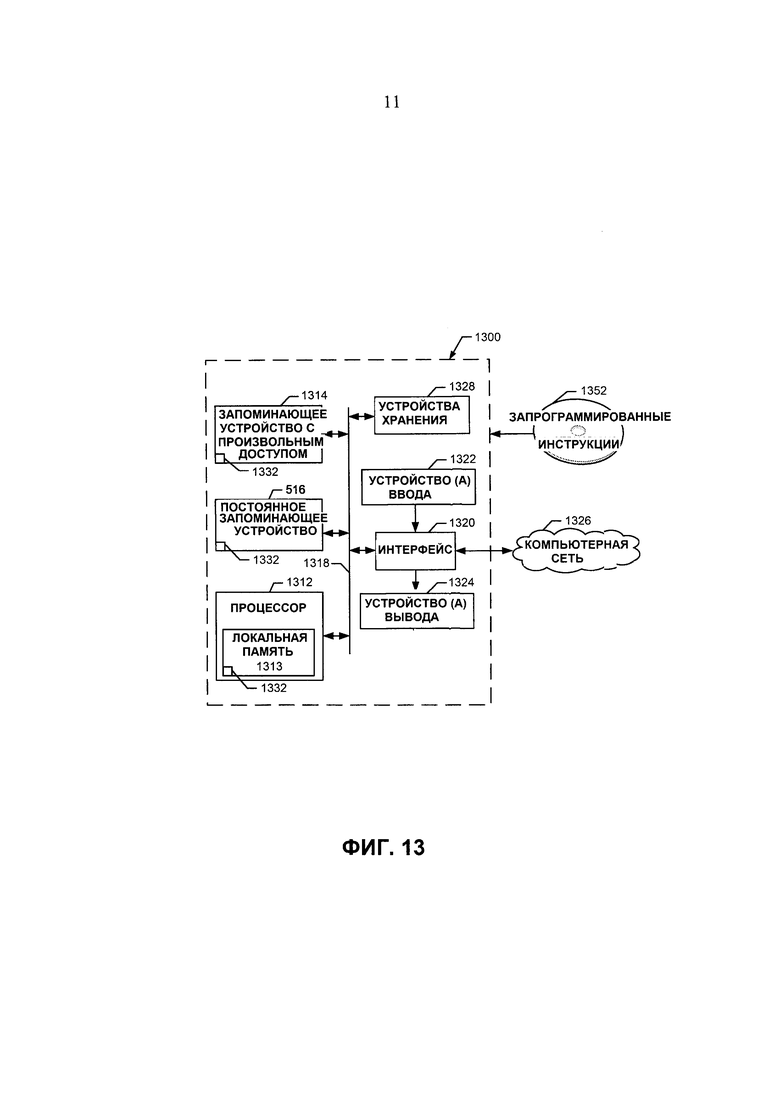
[0018] Фиг. 13 схематически иллюстрирует представленную процессорную платформу, которая может быть использована и/или запрограммирована на выполнение представленных процессов по Фиг. 6-12 для реализации представленного на Фиг. 2 устройства управления и/или, в более общем смысле, представленной на Фиг. 1 системы 100.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0019] В системах управления процессами, также как и в системах отопления, вентиляции и системах кондиционирования воздуха (HVAC), в эксплуатации часто имеются многочисленные клапаны, которые остаются в рабочем состоянии в течение длительных периодов времени, сохраняя неизмененное положение элемента управления потоком в течении этого времени. Например, предохранительный выключающий клапан может оставаться в открытом положении, пока не сработает за счет неисправности в системе. Клапаны, которые не выполняют движения достаточно часто (имеется в виду диск, заглушка или другой элемент управления потоком в клапане, не двигающиеся достаточно часто), могут застревать таким образом, что они не срабатывают должным образом, когда потребуется. По существу, полная надежность системы зависит от уверенности, что операторы (и/или инженеры), управляющие системой, знают, что такие клапаны будут двигаться, когда понадобится. Соответственно, существуют известные способы, которые перемещают клапаны для испытания и/или проверки движения клапанов, и/или выявления застрявших клапанов (например, процедуры испытания частичного застревания). В дополнение к проверке движения клапана, испытанные таким образом клапаны, могут также содействовать предотвращению застревания клапанов, тем самым продлевая срок службы клапанов.
[0020] В то время как процедуры испытания частичного застревания и другие процедуры, удостоверяющие движение клапана, известны, присоединение каждого клапана из системы управления (которые могут исчисляться сотнями или даже тысячами) в коммуникационную сеть системы управления для контроля каждого клапана и/или осуществление автоматического приведения в действие и обратная связь по позиционированию каждого клапана имеет непомерно высокую стоимость. В итоге, от операторов может потребоваться отслеживание того, когда клапаны должны быть испытаны, и инициировать такие испытания, на что тем самым затрачивается их время и отвлекается их внимание от других аспектов системы управления. Кроме того, даже когда клапаны сконфигурированы на контроль и/или управляемы в пределах системы управления, вовлечены многочисленные компоненты, в результате чего возрастают сложность и стоимость конфигурирования, эксплуатации и обслуживания системы. Например, компоненты в таких системах могут содержать центральный компьютер системы управления для определения последовательностей управления испытаниями движения клапана, контроллер для реализации последовательностей управления и подачи сигнала приводу на перемещение клапана, компоненты для передачи сигнала управления приводу клапана (например, по физическим проводам или через беспроводной сетевой шлюз), позиционер или соленоид для приведения в действие привода и/или датчик положения для проверки движения и/или положения клапана.
[0021] В соответствии с раскрытой в данном документе доктриной, представленное устройство управления раскрыто, как по меньшей мере преодолевающее указанные выше проблемы, имеющие место для клапанов с пневматическим приводом. Как более подробно описано ниже, представленное устройство управления может быть установлено непосредственно на пневматическом приводе для подачи пневматического сигнала на перемещение привода (например, для перемещения регулирующего поток элемента клапана, присоединенного к приводу). Кроме того, представленное устройство управления может содержать процессор для локальной реализации логики и/или программ управления, используемых для управления клапаном. Кроме того, представленное устройство управления может содержать датчик, обеспечивающий получение информации о положении, для проверки движения клапана. Таким образом, раскрытое в данном документе представленное устройство управления, позволяет осуществлять полный контроль и управление клапаном. Кроме того, поскольку представленное устройство управления может быть установлено непосредственно на приводе клапана, управление может осуществляться локально, тем самым повышая эффективность системы за счет устранения необходимости в передаче данных обратно к центральному компьютеру системы для анализа, а затем ожидания передачи в ответ сигнала управления. Кроме того, в то время как раскрытое в данном документе представленное устройство управления может быть сконфигурировано для управления клапаном независимо, устройство управления может также быть сконфигурировано для взаимодействия с другими компонентами в рамках системы управления. Эти и другие аспекты представленное устройства управления будут более подробно описаны ниже в соответствии с каждой из представленных фигур. Кроме того, в то время как устройство и способы, раскрытые в данном документе, описаны в связи с контролем и/или наблюдением за пневматическим приводом, который соединен с клапаном, сам находящийся под контролем и/или наблюдением пневматический привод может быть альтернативно соединен с любым пневматически управляемым устройством.
[0022] Фиг. 1 схематически иллюстрирует представленную систему управления процессом 100, в рамках которой может быть реализована доктрина данного раскрытия. Представленная система управления процессом 100 может быть любой из распределенных систем управления (DCS), системы диспетчерского управления и сбора данных (SCADA), системы отопления, вентиляции и кондиционирования (HVAC) или любой другой системы управления. Представленная система 100, проиллюстрированная на Фиг. 1, содержит один или более производственных контроллеров (один из которых обозначен числовой ссылкой 102), одну или более станций оператора (одна из которых обозначена числовой ссылкой 104), а также одну или более рабочих станций (одна из которых обозначена числовой ссылкой 106). Представленный производственный контроллер 102, представленная станция оператора 104 и представленная рабочая станция 106 коммуникативно соединены через шину и/или локальную вычислительную сеть (LAN) 108, на которую обычно ссылаются как на сеть управления приложениями (ACN).
[0023] Представленный контроллер 102, проиллюстрированный на Фиг. 1, может быть, например, контроллером DeltaV™, продаваемым Fisher-Rosemount Systems, Inc., компании Emerson Process Management. Однако, вместо него может быть использован любой другой контроллер. Кроме того, в то время как только один контроллер 102 показан на Фиг. 1, дополнительные контроллеры и/или платформы управления процессом любого желаемого типа и/или комбинации типов могут быть присоединены к LAN 108. В любом случае, представленный контроллер 102 выполняет одну или более процедур управления процессом, связанных с системой управления процессом 100, что были сгенерированы системным инженером и/или другим системным оператором с использованием станции оператора 104, и которые были загружены и/или установлены в контроллер 102.
[0024] Представленная станция оператора 104, проиллюстрированная на Фиг. 1, предоставляет оператору возможность просмотра и/или работы на одном или более экранов дисплеев оператора и/или в приложениях, которые позволяют оператору видеть переменные системы управления процессом, этапы, условия, аварийные сигналы; менять настройки системы управления процессом (например, начальные установки, рабочие состояния, отмена аварийных сигналов, бесшумные аварийные сигналы, и т.д.); конфигурировать и/или калибровать устройства в рамках системы управления процессом 100; выполнять диагностику устройств в рамках системы управления процессом 100; и/или иным образом взаимодействовать с устройствами в рамках системы управления процессом 100.
[0025] Представленная рабочая станция 106, проиллюстрированная на Фиг. 1, может быть сконфигурирована в виде станции приложений для выполнения одного или более приложений информационных технологий, пользовательских интерактивных приложений и/или коммуникационных приложений. Например, рабочая станция 106 может быть сконфигурирована для выполнения приложений, в первую очередь связанных с управлением процессом, в то время как другая станция приложений (не показана) может быть сконфигурирована для выполнения в первую очередь коммуникационных приложений, которые позволяют системе управления процессом 100 быть в коммуникации с другими устройствами или системами с использованием любых желаемых средств коммуникации (например, беспроводных, проводных и т.д.), а также протоколов (например, HTTP, SOAP и т.д.). Представленные станция оператора 104 и рабочая станция 106, проиллюстрированные на Фиг. 1, могут быть реализованы с использованием одной или более рабочих станций и/или любых других подходящих компьютерных систем и/или систем обработки. Например, станция оператора 104 и/или рабочая станция 106 могут быть реализованы с использованием однопроцессорных персональных компьютеров, одно- или многопроцессорных рабочих станций и т.д.
[0026] Представленная локальная сеть LAN 108, проиллюстрированная на Фиг. 1, может быть реализована с использованием любых затребованных коммуникационных средств и протокола. Например, представленная локальная сеть LAN 108 может быть основана на проводной и/или беспроводной Ethernet коммуникационной схеме. Тем не менее, может быть использовано любое другое подходящее средство(а) коммуникации и/или протокол(ы). Кроме того, хотя на Фиг. 1 проиллюстрирована единичная локальная сеть LAN 108, более чем одна LAN и/или альтернативные элементы коммуникационного оборудования могут быть использованы для обеспечения дублирования коммуникационных каналов между представленными на Фиг. 1 системами.
[0027] Представленный контроллер 102, проиллюстрированный на Фиг. 1, соединен с множеством полевых смарт-устройств 110, 112 и 114 через шину данных 116 и шлюз ввода/вывода (I/O) 118. Полевыми смарт-устройствами 110, 112, и 114 могут быть Fieldbus-совместимые клапаны, приводы, датчики и т.д., и в этом случае полевые смарт-устройства 110, 112, 114 осуществляют коммуникацию через шину данных 116 с использованием хорошо известного протокола Foundation Fieldbus. Конечно, вместо этих могут быть использованы другие типы полевых смарт-устройств и протоколов связи. Например, вместо упомянутых выше, полевыми смарт-устройствами 110, 112 и 114 могут быть Profibus и/или HART-совместимые устройства, которые осуществляют коммуникацию через шину данных 116 с использованием хорошо известных коммуникационных протоколов Profibus и HART. Дополнительные устройства ввода/вывода (I/O) (аналогичные и/или идентичные шлюзу ввода/вывода (I/O) 118) могут быть присоединены к контроллеру 102, чтобы обеспечить возможность осуществлять коммуникацию с контроллером 102 дополнительным группам полевых смарт-устройств, которыми могут быть устройства Foundation Fieldbus, устройства HART, и т.д.
[0028] В дополнение к представленным полевым смарт-устройствам 110, 112, и 114, одно или более не-смарт полевых устройств 120 и 122 могут быть коммуникативно присоединены к представленному контроллеру 102. Представленными не-смарт полевыми устройствами 120 и 122, проиллюстрированными на Фиг. 1, могут быть, например, конвенциональные устройства, потребляющие 4-20 миллиампер (мА) или 0-24 вольт постоянного тока (VDC), которые обмениваются данными с контроллером 102 через соответствующие проводные соединения.
[0029] Кроме того, как описано в данном документе, другие полевые устройства (такие как пневматический привод 124) могут взаимодействовать с остальной частью представленной системы 100 через устройство управления 126. Устройство управления 126 может располагаться вблизи привода 124 (например, установлено на приводе 124) для обеспечения локального управления приводом 124 по перемещению соответствующего клапана. Локальное управление повышает эффективность в случае наблюдения, анализа и контролируемого реагирования в качестве обратной связи на информацию о положении, поскольку все может быть осуществлено одним и тем же устройством, избегая тем самым расхода времени и ресурсов, необходимых для передачи данных центральному компьютеру системы, например, с помощью коммуникационной сети, и получения в дальнейшем обратно новых сигналов управления через эту же сеть. Для управления приводом 124, представленное устройство управления 126 содержит пневматический выход, обеспечивающий поступление пневматических сигналов на привод 124, датчик положения для контроля фактического перемещения привода 124 и/или соответствующего клапана, и процессор для анализа данных обратной связи по положению и осуществления алгоритмов локального управления. В некоторых примерах представленное устройство управления 126 делает возможной проводную и/или беспроводную коммуникацию между приводом 124 и контроллером 102 и/или другими компонентами в рамках системы 100 (например, программируемыми логическими контроллерами (PLCs) и/или другими полевыми устройствами 110, 112, 114). Пример способа реализации представленного устройства управления 126, проиллюстрированного на Фиг. 1, описан ниже в соответствии с Фиг. 2.
[0030] В то время как Фиг. 1 иллюстрирует пример системы управления процессом 100, в рамках которой способы и устройство для контроля, испытаний и/или управления клапаном, раскрытые в данном документе, могут быть успешно использованы, также способы и устройство, описанные в данном документе, могут, при желании, быть с успехом применены в других производственных процессах и/или системах управления процессами большей или меньшей сложности (например, имеющие более одного контроллера, на протяжении более чем одного географического местоположения и т.д.), чем показано в примере, проиллюстрированном на Фиг. 1.
[0031] Фиг. 2 иллюстрирует пример способа реализации представленного на Фиг. 1 устройства управления 126. Пример устройства управления 126 содержит процессор 200, интерфейс оператора 202, коммуникационный интерфейс 204, датчик положения 206, бистабильный клапан 208 и источник энергии 210. Представленный процессор 200 в примере устройства управления 126 выполняет одно или более приложение(й) для выполнения процедур(ы) управления за счет взаимодействия с представленным интерфейсом оператора 202, представленным коммуникационным интерфейсом 204, представленным датчиком положения 206 и бистабильным клапаном с целью локального управления пневматическим приводом 124 для перемещения клапана 212. Пневматическим приводом 124 может быть любой подходящий линейный или поворотный пневматический привод, используемый для приведения в действие любого линейного или поворотного клапана. Пневматический привод 124 может быть альтернативно использован для приведения в действие любого другого пневматически управляемого элемента системы управления процессом.
[0032] Для обеспечения взаимодействия операторов с представленным устройством управления 126 используя процессор 200, представленный интерфейс оператора 202 содержит любой тип выходных компонентов (например, экран дисплея LCD) и любой тип компонентов ввода (например, нажимные кнопки, сенсорный экран и т.д.). Кроме того, представленный коммуникационный интерфейс 204 позволяет операторам взаимодействовать с представленным устройством управления 126, используя любое подходящее внешнее устройство(а), как, например, центральный компьютер приложения системы управления процессом и/или другое приложение(я) (например, реализованные на станции оператора 104 и/или станция приложений 106, проиллюстрированная на Фиг. 1), портативный компьютер, мобильное устройство (например, смартфон и/или ручной полевой коммуникатор) и т.д. Кроме того, представленный коммуникационный интерфейс 204, проиллюстрированный на Фиг. 2, делает возможным взаимодействие устройства управления с контроллером (например, контроллером 102), другими полевыми устройствами (например, полевыми устройствами 110, 112, 114, проиллюстрированными на Фиг. 1) и/или любыми другими компонентами в рамках представленной системы управления процессом 100, проиллюстрированной на Фиг. 1.
[0033] Датчик положения 206 в представленном устройстве управления 126, проиллюстрированном на Фиг. 2, используется для контроля положения и/или перемещение клапана 212 на основе перемещения привода 124 и для предоставления процессору 200 информации обратной связи о положении. Соответственно, датчик положения 206 располагается в пределах устройства управления 126, а устройство управления 126 установлено или в противном случае расположено вблизи привода 124 таким образом, чтобы дать возможность датчику положения 206 получать желаемое показание, как это более подробно описано в соответствии с Фиг. 3А-5В.
[0034] Бистабильный клапан 208 в проиллюстрированном примере управляется процессором 200 для подачи пневматического сигнала к пневматическому приводу 124. Соответственно, пневматический источник энергии 214 предусмотрен для бистабильного клапана 208. Бистабильный клапан 208 может быть введен в действие одним или более пневматическим(и) выходом(ами) 216 для приведения в действие привода 124. В проиллюстрированном примере, любой избыток пневматического давления, полученного от пневматического источника энергии 214 высвобождается из устройства управления 126 как пневматический выхлоп 218.
[0035] Представленное устройство управления 126 также может содержать источник энергии 210. В некоторых примерах источником энергии 210 может быть внутренняя батарея и/или модуль батареи, чтобы полностью разместить все функциональные возможности устройства управления 126 в корпусе, описанном ниже в соответствии с Фиг. 3А-3С. В других примерах, снабжение энергией 210 устройства управления 126 может осуществляться от внешнего источника энергии через любой подходящей кабель питания. От пневматического источника энергии 214 высвобождается из устройства управления 126 как пневматический выхлоп 218.
[0036] Один или более из элементов, процессов и/или устройств, проиллюстрированных на Фиг. 2, могут быть объединены, разделены, реорганизованы, опущены, устранены и/или реализованы любым другим способом. Кроме того, представленный процессор 200, представленный интерфейс оператора 202, представленный(е) коммуникационный(е) интерфейс(ы) 204, представленный датчик положения 206, представленный бистабильный клапан 208 и представленный источник энергии 210 и/или, в более общем смысле, представленное устройство управления 126, проиллюстрированное на Фиг. 2, могут быть реализованы посредством аппаратных средств, программного обеспечения, встроенного программного обеспечения и/или любой комбинации аппаратных средств, программного обеспечения и/или встроенного программного обеспечения. Таким образом, например, любой из представленного процессора 200, представленного интерфейса оператора 202, представленного коммуникационного интерфейса 204, представленного датчика положения 206, представленного бистабильного клапана 208 и представленного источника энергии 210, и/или, в более общем смысле, представленное устройство управления 126 может быть реализовано с помощью одной или более электронных схем(ы), программируемого(ых) процессора(ов), специализированных(ой) интегральных(ой) схем(ы) (ASIC(s)), программируемых(ого) логических(ого) устройств(а) (PLD(s)), и/или программируемых(ого) полевых(ого) логических(ого) устройств(а) (FPLD(s)), и т.д. Более того, представленное устройство управления 126, проиллюстрированное на Фиг. 2, может содержать один или более элементов, процессов и/или устройств, в дополнение к-, или вместо таких, которые изображены на Фиг. 2, и/или могут содержать более одного любого или всех из проиллюстрированных элементов, процессов и устройств.
[0037] Фиг. 3А-3С соответствуют виду сверху, сбоку и снизу представленного устройства управления 126, проиллюстрированного на Фиг. 2. Как показано на Фиг. 3А, представленное устройство управления 126 содержит корпус 300 для расположения внутренних компонентов. Кроме того, представленное устройство управления 126, проиллюстрированное на Фиг. 3А-3С, может иметь антенну 302 для беспроводной коммуникации с другими устройствами и/или другими компонентами системы управления процессом (например, системой 100, проиллюстрированной на Фиг. 1) без необходимости в проводных соединениях. В других примерах, устройство управления 126 может использовать проводную коммуникацию с системой управления процессом 100. В некоторых примерах, корпус 300 сконструирован, чтобы быть искробезопасным, что дает возможность использования устройства управления 126 в опасных средах (например, класс I - горючие газы или пары, класс II - легковоспламеняющаяся пыль и т.д.), которые могут представлять опасность взрыва или иную угрозу.
[0038] В приведенном примере, устройство управления 126 включает в себя экран LCD 304 и кнопки 306 в качестве компонентов интерфейса оператора 202, проиллюстрированного на Фиг. 2, через который оператор может взаимодействовать с устройством управления 126. Представленное устройство управления 126 может также содержать канал 308, через который магнит и/или магнитная матрица могут перемещаться с тем, чтобы быть контролируемыми датчиком положения (например, представленный датчик положения 206 на Фиг. 2). Таким образом, представленный датчик положения 206 размещается в пределах представленного устройства управления 126 вдоль канала 308 с целью обнаружения движения магнита и/или магнитной матрицы без соединений и/или бесконтактным способом. Таким образом, движение привода 124 и соответствующего клапана 212 может скрытно контролироваться путем присоединения магнита и/или магнитной матрицы к валу или штоку привода 124 и размещения внутри канала 308. Чтобы помочь в выравнивании магнита и/или магнитной матрицы, которые присоединены к приводу 124, соосно каналу 308, представленное устройство управления 126 может иметь резьбовые отверстия 310, благодаря которым устройство управления 126 может быть установлено либо непосредственно, либо опосредствованно на приводе 124.
[0039] Представленное устройство управления 126, проиллюстрированное на Фиг. 3А-3С, также содержит пневматические порты 312, 314, 316, 318, 320, среди которых имеется порт пневматической подачи 314 для подключения пневматического источника энергии (например, пневматического источника энергии 214, проиллюстрированного на Фиг. 2) к устройству управления 126, первому и второму портам управления 318, 320, для обеспечения пневматических выходов (например, 216, проиллюстрированных на Фиг. 2) для приведения в действие привода 124 (например, с помощью соединительных трубок), и первого и второго выпускных портов 312, 316, соответствующих портам управления 318, 320.
[0040] Фиг. 4 иллюстрирует представленное на Фиг. 3 устройство управления 126, установленное на поворотном приводе 400, присоединенном к поворотному клапану 402. В проиллюстрированном примере, привод 400 является поворотным приводом двойного действия, который содержит первый и второй пневматические входные порты 404, 406 для коммуникации с соответствующими первым и вторым портами управления 318, 320, проиллюстрированными на Фиг. 3С (например, с помощью труб), чтобы получить пневматический сигнал на открытие либо закрытие клапана 402.
[0041] Представленное устройство управления 126 прикреплено к приводу 400 с помощью монтажного кронштейна 408 для крепления устройства управления 126 вблизи привода 400. В проиллюстрированном примере, магнитная матрица 410 установлена на валу привода на конце, противоположном клапану 402. Монтажный кронштейн 408 и магнитная матрица 410 могут быть любого подходящего размера и/или формы так, чтобы магнитная матрица 410 была позиционирована в пределах канала 308 в представленном устройстве управления 126. Таким образом, так как привод 400 открывает и/или закрывает клапан 402, устройство управления 126 может получать информацию обратной связи по положению с помощью датчика положения 206 (Фиг. 2) путем обнаружения вращения магнитной матрицы 410 внутри канала 308. Используя информацию о положении, устройство управления 126 может затем выполнить регулировку клапана 402 на основе алгоритмов управления, выполненных с помощью процессора 200 и/или на основе управляющих сигналов, полученных с помощью системы управления центрального компьютера и/или любого другого внешнего устройства.
[0042] Фиг. 5А и 5В иллюстрируют соответствующие виды сзади и сбоку представленного устройства управления, проиллюстрированного 126 на Фиг. 3, установленного на линейном приводе 500, который соединен с линейным клапаном 502. В проиллюстрированном примере, представленное устройство управления 126 прикреплено непосредственно к приводу 500 с помощью ввертных болтов 504 и резьбовых отверстий 310 в устройстве управления 126 сквозь стойку 506 траверсы привода 500. Однако в других примерах, устройство управления 126 может быть установлено на приводе 500 опосредствованно - с использованием любых подходящих кронштейнов, зажимов и/или других средств. Представленное устройство управления 126 ориентировано по отношению к приводу 500 таким образом, что канал 308 параллелен штоку привода 508. Кроме того, представленное устройство управления 126 расположено таким образом, что пневматические порты 312, 314, 316, 318, 320 доступны для присоединения труб, и канал 308 доступен для приема магнитной матрицы 510.
[0043] Проиллюстрированный на Фиг. 5А-5В пример показывает также сборку кронштейна магнитной матрицы 512, используемой для присоединения магнитной матрицы 510 к штоку привода 508 и удержания магнитной матрицы 510 внутри канала 308 представленного устройства управления 126. Таким же образом, как шток привода 508 движется для открытия и/или закрытия клапана 502, так и магнитная матрица 510 движется внутри канала 308, чтобы обеспечить датчику положения 206 устройства управления 126 возможность контроля движения. Контроль движения предоставляет информацию о положении клапана 502, чтобы обеспечить устройству управления 126 возможность регулировки клапана 502, основанной на алгоритмах управления, выполняемых с помощью процессора 200 и/или на основе сигналов управления, полученных с помощью центрального компьютера системы управления или любого другого внешнего устройства.
[0044] Фиг. 6-12 являются блок-схемами, представляющими примеры процессов, которые могут быть осуществлены для реализации представленного устройства управления 126, проиллюстрированного на Фиг. 2, с целью управления пневматическим приводом и/или контроля соответствующего клапана. Более подробно примеры процессов, проиллюстрированных на Фиг. 6-12, могут быть представлены машиночитаемыми командами, которые содержат программу для выполнения процессором, таким как процессор 1312, показанный в примере процессорной платформы 1300, обсуждаемой ниже в соответствии с Фиг. 13. Программа может быть реализована программным обеспечением, хранящимся на материальном машиночитаемом носителе, таком как CD-ROM, дискета, жесткий диск, цифровой универсальный диск (DVD), Blu-Ray диск или память, связанная с процессором 1312. В качестве альтернативы, некоторые или все из примеров процессов, проиллюстрированных на Фиг. 6-12, могут быть реализованы с использованием любых комбинаций(и) интегральных схем(ы) специального назначения (ASIC(s)), программируемых(ого) логических(ого) устройств(а) (PLD(s)), программируемых(ого) логических(ого) полевых(ого) устройств(а) (FPLD(s)), дискретной логики, аппаратных средств, микропрограммного обеспечения и т.п. Кроме того, одна или более из представленных операций, проиллюстрированных на Фиг. 6-12, могут быть реализованы как вручную, так и в любой(ых) комбинации(ях) любых из выше представленных способов, например, любой комбинацией микропрограммного обеспечения, программного обеспечения, дискретной логики и/или аппаратных средств. Кроме того, хотя в примерах процессы описаны в первую очередь со ссылкой на представленное устройство управления, проиллюстрированное 126 на Фиг. 2, многие другие способы реализации примеров процессов, проиллюстрированных на Фиг. 6-12, могут быть использованы альтернативно. Например, порядок выполнения блоков может быть изменен, и/или некоторые из описанных блоков могут быть изменены, исключены или скомбинированы. Кроме того, все или любая часть каждого из примеров процессов, проиллюстрированных на Фиг. 6-12, могут быть выполнены последовательно и/или параллельно, например, с помощью раздельных потоков обработки, процессоров, устройств, дискретной логики, электронных схем и т.п.
[0045] Как упоминалось выше, примеры процессов, проиллюстрированных на Фиг. 6-12, могут быть реализованы с использованием закодированных инструкций (например, машиночитаемых команд), хранящихся на материальном машиночитаемом носителе данных, таком как жесткий диск, флэш-память, постоянное запоминающее устройство (ROM), компакт-диск (CD), универсальный цифровой диск (DVD), кэш, оперативное запоминающее устройство (RAM) и/или любая другая запоминающая среда, в которой информация хранится в течение любой продолжительности времени (например, в течение длительных периодов, постоянно, краткосрочно, для временной буферизации и/или для кэширования информации). Как это использовано в данном описании, термин "материальный машиночитаемый носитель" в явном виде установлен, как содержащий любой тип машиночитаемых средств хранения и исключает передаваемые сигналы. Дополнительно или альтернативно, примеры процессов, проиллюстрированных на Фиг. 6-12, могут быть реализованы с использованием кодированных инструкций (например, машиночитаемых команд), хранящихся на постоянном машиночитаемом носителе, таком как жесткий диск, флэш-память, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш, память с произвольным доступом и/или любая другая запоминающая среда, в которой информация хранится в течение любой продолжительности времени (например, в течение длительных периодов, постоянно, краткосрочно, для временной буферизации и/или для кэширования информации. Как это использовано в данном документе, когда фраза "по меньшей мере" используется в качестве переходного термина в преамбуле заявки, она является неограниченной точно так же, как и термин "содержащий" является неограниченным. Таким образом, заявка, использующая "по меньшей мере" в качестве переходного термина в ее преамбуле, может содержать элементы в дополнение к тем, которые явно излагаются в заявке.
[0046] Фиг. 6 является блок-схемой, представляющей пример процесса, что может быть осуществлен с целью реализации представленного устройства управления 126, проиллюстрированного на Фиг. 2, чтобы управлять и/или контролировать пневматический привод. Представленный процесс начинается, когда устройство управления (например, представленное устройство управления 126) получает параметры управления или настройки, чтобы двигать клапан (например, 212) (блок 600). В некоторых при мерах, настройки управления должны быть получены от оператора через внешние устройства, находящиеся в коммуникации с устройством управления (например, 126) через один или более коммуникационных интерфейсов (например, 204). Например, устройство управления (например, 126) может получать настройки управления от любого из перечисленных: центрального компьютера системы SCADA, центрального компьютера DCS, контроллера, карманного полевого коммуникатора или любого другого компонента системы управления процессом. В других примерах, устройство управления (например, 126) может получать настройки управления от оператора через интерфейс оператора (например, 202), включенного непосредственно в устройство управления (например, 126). В некоторых примерах, коммуникационные интерфейсы (например, 204) делают возможной беспроводную коммуникацию между различными компонентами. В других примерах, различные компоненты могут быть физически соединены кабелями.
[0047] Исходя из настроек управления, управляющее устройство (например, 126) обеспечивает подачу пневматического сигнала на привод (например, 124) (блок 602). В некоторых примерах настройками управления может быть определенный сигнал управления. В таких примерах, процессор (например, 200) в рамках устройства управления (например, 126) может преобразовывать сигнал управления в пневматический сигнал, и приводить в действие бистабильный клапан (например, 208), чтобы поставлять соответствующее количество пневматической энергии на привод (например, 124). В других примерах, настройками управления могут быть значения измеренных параметров от других полевых устройств в рамках системы управления. В таких примерах, процессор (например, 200) может выполнять алгоритмы управления для выявления, каким должен быть надлежащий сигнал управления, и затем преобразовать его в пневматический сигнал для питания привода (например, 124). Таким образом, в то время как устройство управления (например, 126) может управлять приводом (например, 124) с помощью команд от удаленного центрального компьютера системы управления процессом и/или другого устройства, управление приводом (например, 124) может быть выполнено совершенно локально с помощью устройства управления (например, 126). Как это более подробно описано ниже, в некоторых примерах устройство управления (например, 126) может реализовывать алгоритмы управления локально на основе информации обратной связи по положению, полученной с помощью датчика положения (например, 206) управляющего устройства (например, 126), опираясь на данные из других компонентов в системе управления с помощью центрального компьютера системы и/или другого устройства. В других примерах, устройство управления (например, 126) может взаимодействовать непосредственно с другими полевыми устройствами (например, через беспроводную ячеистую сеть), чтобы обеспечить устройству управления (например, 126) возможность непосредственного сбора всей необходимой информации для локального управления клапаном (например, 212). Такое локальное управление повышает эффективность по сравнению с известными системами управления, так как устраняет время для взаимодействия всех параметров и/или настроек и центрального компьютера системы для реализации программ управления, а затем получения обратно соответствующих сигналы управления.
[0048] Как только пневматический сигнал подается на привод (например, 124), привод (например, 124) и соответствующий клапан (например, 212) приходят в движение. Соответственно, в примере процесса, проиллюстрированном на Фиг. 6, устройство управления (например, 126) контролирует положение клапана (например, 212) (блок 604). Положение клапана (например, 212) контролируется с помощью датчика положения (например, 206) в рамках устройства управления (например, 126). Таким образом, управляющее устройство (например, 126) может не только контролировать привод (например, 124) для перемещения клапана (например, 212), а устройство управления (например, 126) может также получить информацию о местоположении, чтобы проверить движение и положение клапана (например, 212). Таким образом, пример процесса дополнительно содержит обеспечение аттестации движения клапана (например, 212) (блок 606). Аттестация может быть обеспечена с помощью дисплея, являющегося частью интерфейса оператора (например, 202) и/или с помощью любого другого устройства, передавая результаты аттестации через коммуникационные интерфейсы (например, 204). Представленный процесс, проиллюстрированный на Фиг. 6, затем выявляет, следует ли продолжать контроль и/или наблюдение за клапаном (например, 212) (блок 608). Если устройству управления (например, 126) необходимо продолжить контроль и/или наблюдение за клапаном (например, 212), управление представленным процессом возвращается к блоку 600. В противном случае, процесс заканчивается.
[0049] Фиг. 7 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления 126, проиллюстрированное на Фиг. 2, подлежащее калибровке для использования с конкретным клапаном. Представленный процесс начинается, когда устройство управления (например, представленное устройство управления 126) получает команды, чтобы быть откалиброванным для использования с клапаном (например, 212) (блок 700). В некоторых примерах, команды должны быть получены от оператора с помощью внешних устройств, находящихся в коммуникации с устройством управления (например, 126) через один или более коммуникационных интерфейсов (например, 204), как описано выше. В других примерах, устройство управления (например, 126) может получить команды от оператора через интерфейс оператора (например, 202), включенный непосредственно в устройство управления (например, 126).
[0050] На основании команд, устройство управления (например, 126) задает ход клапану (например, 212) от одного предела (например, полностью закрыт) до другого предела (например, полностью открыт) (блок 702). Клапан может быть задействован устройством управления (например, 126), обеспечивая подачу пневматического сигнала к приводу (например, 124), соединенному с клапаном (например, 212) для перемещения клапана (например, 212) по всей длине его диапазона движения. Пример процесса, проиллюстрированного на Фиг. 7, также содержит контроль за движением клапана (например, 212) (блок 704). Движение клапана (например, 212) контролируется с помощью датчика положения (например, 206) в рамках устройства управления (например, 126). На основе обратной связи по позиционированию, полученной с помощью датчика положения (например, 206), представленный процесс выясняет максимальный ход или диапазон клапана (например, 212) и соответствующие пределы этого диапазона (блок 706). В некоторых примерах, где клапан (например, 212) является поворотным клапаном, диапазон основывается на полном расстоянии вращения вала привода, обнаруженного датчиком положения (например, 206). В других примерах, где клапан (например, 212) является линейным клапаном, максимальный ход основывается на полном расстоянии перемещения штока клапана, как это выявляется датчиком положения (например, 206). В то время, когда полный диапазон хода клапана (например, 212) и соответствующие пределы идентифицированы (в блоке 706), представленный процесс хранит пределы и диапазон перемещения клапана (например, 212) (блок 708). После того как эти параметры сохранены, представленный процесс, проиллюстрированный на Фиг. 7, заканчивается.
[0051] Фиг. 8 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления 126, проиллюстрированное на Фиг. 2, для испытания движения клапана. Приведенный процесс начинается, когда устройство управления (например, представленное устройство управления 126) получает запрос на испытание или проверку перемещения клапана (блок 800). Аналогично примерам процессов, проиллюстрированных на Фиг. 6- 7, запрос на осуществление процедуры испытания может быть получен удаленно через внешние устройства, находящиеся в коммуникации с устройством управления (например, 126), или локально с использованием интерфейса оператора (например, 202), включенного непосредственно в устройство управления (например, 126). Наряду с запросом, пример процесса, проиллюстрированного на Фиг. 8, также влечет за собой получение расписания процедуры испытания (блок 802). В некоторых примерах, оператор может запросить одноразовое испытание, которое должно быть выполнено для определенного клапана (например, 212). В других примерах, оператор может затребовать составление расписания испытаний (например, повторяющиеся периодически или апериодически) без необходимости каждый раз инициализировать процедуру испытания. Соответственно, параметры или настройки для составления такого расписания могут быть сосредоточены в блоке 802.
[0052] Пример процесса, проиллюстрированного на Фиг. 8, затем выясняет, на основе введенного расписания, не настало ли время для процедуры испытания (блок 804). Если время для выполнения процедуры еще не настало, управление возвращается к блоку 804. Если выясняется, что процедура испытания по расписанию должна быть реализована, представленный процесс влечет за собой контроль за движением клапана (например, 212) (блок 808). Движение клапана (например, 212) можно контролировать с помощью датчика положения (например, 206) управляющего устройства (например, 126), как описано выше. В примере процесса, проиллюстрированного на Фиг. 8, клапан перемещается в положение испытания (например, 212) (блок 810). Движение клапана осуществляется с помощью устройства управления (например, 126), обеспечивающего подачу пневматического сигнала на привод (например, 124), соединенный с клапаном (например, 212), как описано выше. В некоторых примерах, расстояние, пройденное клапаном (например, 212) во время процедуры и от своего первоначального положения в положение испытания, может быть относительно небольшим по сравнению с полным диапазоном перемещения клапана (например, 212). Тем не менее, в других примерах, во время процедуры испытания клапан, по существу, может перемещаться по всему диапазону движения клапана (например, 212). В других примерах, клапан (например, 212) может перемещаться по всему своему диапазону движения.
[0053] После перемещения клапана (например, 212) (в блоке 810), представленный процесс затем перемещает клапан (например, 212) обратно в исходное положение (блок 812). Как вариант, в представленном процессе клапан может перемещаться (например, 212) в положение, отличное от исходного положения. В других примерах представленный процесс оставляет клапан (например, 212) в положении испытания, в которое клапан (например, 212) был перемещен в блоке 810. На основании контролируемого перемещения клапана (например, 212) (блок 808), представленный процесс, проиллюстрированный на Фиг. 8, затем выясняет (например, с помощью процессора 200) прошел ли клапан (например, 212) процедуру испытания (блок 814) или не прошел. Представленный процесс, проиллюстрированный на Фиг. 8, затем предоставляет результаты процедуры испытания (блок 816). Например, если клапан (например, 212) не выдержал испытания (например, клапан застрял или же не выполнил движение, как было предусмотрено), сообщение об ошибке, предупреждение и/или другая индикация неисправности могут быть выведены на интерфейс оператора (например, 202) устройства управления (например, 126) и/или отправлено на другие внешние устройства для просмотра оператором. Подобным образом, если клапан (например, 212) прошел испытание (например, переместился, как и ожидалось), индикация успеха клапана (например, 212) может быть выведена на любой подходящий интерфейс.
[0054] После предоставления результатов процедуры испытания (блок 816), представленный процесс затем выясняет, имеются ли в расписании последующие процедуры испытаний (блок 818). Если это так, то управление возвращается блоку 804, ожидать следующего по расписанию испытания. Если представленный процесс выясняет, что в расписании нет дополнительного испытания, приведенный процесс заканчивается.
[0055] Фиг. 9 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления 126, проиллюстрированное на Фиг. 2, для выявления и реагирования на ошибки в системе управления процессом (например, 100), связанные с клапаном (например, 212). Представленный процесс начинается, когда устройство управления (например, представленное устройство управления 124) обнаруживает ошибку в системе управления, связанную с клапаном (например, 212) (блок 900). В некоторых примерах обнаруженная ошибка может быть основана на внутренней неисправности устройства управления (например, 126). Примеры внутренних неисправностей включают температуры выше или ниже диапазона рабочих температур для устройства управления (например, 126), отказ платы датчика (например, устройство управления (например, 126) не получает никакой информации о положении клапана от датчика положения (например, 206)), и, в случае беспроводного устройства управления (например, 126), низкое выходное напряжение от внутренней батареи или блока питания. В других примерах, ошибка может основываться на Автоматической Системе Безопасности (SIS) и/или блокировке условия срабатывания триггера для изменения состояния клапана и/или положения клапана (например, 212). В других примерах, ошибка может основываться на состоянии цикла каскадного управления и/или любого другого состояния, сконфигурированного оператором, относящегося к эксплуатации системы. В еще других примерах, обнаруженная ошибка основывается на сбое коммуникации (например, потеряна коммуникация в сети между устройством управления (например, 126) и центральным компьютером системы управления). Затем представленный процесс выясняет, следует ли инициировать состояние неисправности для клапана (например, 212) (блок 902). В некоторых примерах, обнаруженная ошибка может не привести к необходимости установки состояния неисправности. Например, если устройство управления (например, 126) локально реализует управление клапаном (например, 212), и он теряет коммуникацию с центральным компьютером системы управления (что обеспечивает лишь диспетчерское управление), ввод состояния неисправности не требуется, поскольку локальное управление клапаном (например, 212) все еще функционирует. Тем не менее, в других примерах, где все сигналы управления поступают от центрального компьютера системы управления, и происходит сбой коммуникации, может быть желательным инициировать состояния неисправности, так как ничего не управляет клапаном (например, 212). Является ли состояние неисправности желательным, может быть определено оператором заранее на основе любых относящихся к делу факторов.
[0056] Если выяснено (в блоке 902), что состояние неисправности должно быть инициализировано, представленный процесс, проиллюстрированный на Фиг. 9, устанавливает клапан (например, 212) в соответствующее состояние неисправности (блок 904). Состоянием неисправности может быть любое определенное оператором состояние и/или позиция клапана (например, 212), такое как, например, клапан закрыт, клапан открыт, поддерживается последнее текущее положение клапана (последнее перед неисправностью) и с нулевым пневматическим выходом, клапан перемещается в заранее предусмотренную позицию (установка неисправности) и с нулевым пневматическим выходом, клапан закрыт при нулевом пневматическом выходе (неисправность ноль) и с нулевым пневматическим выходом. В представленном процессе, любой из примеров состояний неисправности, может быть задействован для любого из примеров ошибок, описанных выше, как соответствующим образом заранее сконфигурированные оператором на основании типа ошибки, вовлеченных компонентов, вовлеченных приложений и/или любых других относящихся к делу факторов.
[0057] После того, как клапан (например, 212) был установлен в соответствующее состояние неисправности, представленный процесс, проиллюстрированный на Фиг. 9, вводит режим "неисправен" (блок 906). Точно так же, если представленный процесс выясняет (в блоке 902), что состояние неисправности не будет инициировано, управление передается непосредственно блоку 906 для ввода режима "неисправен". Режим "неисправен" не допускает, чтобы любые сигналы управления (например, изменения установок) от центрального компьютера системы управления и/или другого устройства системы, были получены или отреагированы устройством управления (например, 126). В некоторых примерах, режим "неисправен" - это тот же режим, который может быть реализован при проведении технического обслуживания устройства управления (например, 126) и/или связанного привода (например, 124) и/или клапана (например, 212). Представленный процесс, проиллюстрированный на Фиг. 9, затем ожидает восстановления из состояния неисправности (блок 908) (например, после того, как оператор устранил причину обнаруженной ошибки). После того, как достигнуто восстановление от состояния неисправности, представленный процесс устанавливает режим восстановления (например, штатный режим) (блок 910). В некоторых примерах, стандартное действие по умолчанию устройства управления (например, 126) при входе в режим восстановления - это ничего не делать. То есть, даже при том, что устройство управления (например, 126) возвращается к работе, устройство управления (например, 126) не может двигать клапан (например, 212) до тех пор, пока новый набор контрольных точек и/или других параметров управления не будет вручную предоставлены устройству управления (например, 126). В других примерах, режим восстановления может включать назначение параметров управления таким образом, что при повторной установке рабочего режима, устройство управления (например, 126) может перемещать клапан (например, 212) в соответствующее положение. После входа в режим восстановления, представленный процесс, проиллюстрированный на Фиг. 9, заканчивается.
[0058] Фиг. 10 представляет блок-схему представленного процесса, следуя которой может быть реализовано представленное устройство управления, проиллюстрированное на Фиг. 2, для управления клапаном на основе импульсной синхронизации. Управление на основе импульсной синхронизации влечет за собой изменение положения клапана в установленный период времени, вне зависимости от других параметров управления (например, уровня в резервуарах и т.д.). Представленный процесс начинается с получения устройством управления (например, представленным устройством управления 126) сигнала управления, определяющего период времени, в течение которого положение клапана (например, 212) должно быть изменено (блок 1000). В некоторых примерах, управляющий сигнал должен быть получен от оператора через внешние устройства, находящиеся в коммуникации с устройством управления (например, 126) через один или более коммуникационных интерфейсов (например, 204), как описано выше. В других примерах, устройство управления (например, 126) может получать команды от оператора через интерфейс оператора (например, 202) встроенного непосредственно в устройство управления (например, 126).
[0059] На основе сигнала управления, управляющее устройство (например, 126) перемещает клапан (например, 212) в положение, определенное управляющим сигналом (блок 1002). Клапан (например, 212) может быть перемещен управляющим устройством (например, 126), обеспечивая выработку пневматического сигнала, как описано выше. Как только клапан (например, 212) окажется в измененном положении, представленный процесс ожидает в течение периода времени, продолжительность которого указана управляющим сигналом (блок 1004). После истечения этого периода времени, представленный процесс перемещает клапан (например, 212) обратно в его исходное положение (блок 1006). В некоторых примерах, сигнал управления может определить другое положение, отличное от первоначальной позиции, в которое клапан (например, 212) должен быть перемещен после истечения периода времени. После перемещения клапана (например, 212) по блоку 1006 представленный процесс, проиллюстрированный на Фиг. 10, заканчивается.
[0060] Одним из преимуществ представленного процесса, проиллюстрированного на Фиг. 10, по сравнению с известными способами управления клапаном является то, что современная технология ограничена в скорости, с которой отдельные сигналы управления могут быть переданы к конкретному передатчику. Например, в некоторых известных беспроводных системах управления время между первым сигналом, предписывающим клапану быть открытым, и вторым сигналом, предписывающим клапану быть закрытым, все же требует приблизительно тридцать секунд задержки. Таким образом, с некоторыми известными системами было бы невозможно открыть клапан в течение десяти секунд (или за более короткий срок), а затем снова закрыть (например, период импульсной синхронизации). Однако реализация представленного процесса, проиллюстрированного на Фиг. 10, с приведенным устройством управления 126, как описано выше, преодолевает это препятствие. Например, сигнал управления, полученный в блоке 1000, может содержать изменение положения клапана (например, 212) и продолжительность изменения, и устройство управления (например, 126) может затем локально отдать команду клапану (например, 212) на изменение положение клапана за требуемое время.
[0061] Фиг. 11 является блок-схемой представленного процесса, следуя которой может быть реализовано представленное устройство управления 126, проиллюстрированное на Фиг. 2, для задержки перемещения клапана (например, 212). Представленный процесс начинается, когда устройство управления (например, представленное устройство управления 126) получает параметры управления или настройки, определяющие замедленное перемещение клапана (блок 1100). В некоторых примерах настройки управления получении от оператора с помощью внешних устройств, находящихся в коммуникации с устройством управления (например, 126) через один или более коммуникационных интерфейсов (например, 204) устройства управления (например, 126), как описано выше. В других примерах, устройство управления (например, 126) может получать команды от оператора через интерфейс оператора (например, 202) включенного непосредственно в устройство управления (например, 126). В некоторых примерах, в настройках управления содержится позиция, в которую клапан (например, 212) должен быть перемещен, период задержки, соответствующей времени, прежде чем клапан (например, 212) должен быть перемещен, и/или одно или более условий триггера задержки (например, начало обратного отсчета периода задержки). В некоторых примерах, условия и период задержки могут определить последовательность задач в системе управления (например, когда отдельный клапан закрывается (например, условие), подождать две минуты (например, период задержки) перед открытием клапана (например, 212)). В других примерах, могут быть не такие условия, а так, что период задержки начинается, как только будут получены настройки управления (например, ждать 2 часа перед изменением положения клапана (например, 212)). В других примерах, может не быть никакого периода задержки, но задержка включена в условия так, что действие будет предпринято в какой-то момент в будущем (например, ждать до 22:00, чтобы промыть клапан (например, 212)). Кроме того, управляющий сигнал может назначить повторяющееся расписание, в течение которого вышеприведенные условия повторно используются (например, промывать клапан (например, 212) каждый вечер в 22:00).
[0062] После того как будут получены настройки управления, представленный процесс выясняет, выполнены ли условия (блок 1102). Если нет, то представленный процесс ожидает выполнения условий. В примерах, где нет никаких условий, представленный процесс протекает так, как будто все условия были удовлетворены. Соответственно, если представленный процесс, проиллюстрированный на Фиг. 11, выясняет, что условия были удовлетворены (в том числе обстоятельства, где нет никаких условий), представленный процесс ожидает в течение периода задержки (блок 1106), а затем перемещает клапан (например, 212) в указанную позицию (блок 1108). В примерах, где нет периода задержки, представленный процесс выполняет обработку блока 1106, как если бы период задержки уже прошел, чтобы сразу перейти к блоку 1108. После того, как клапан (например, 212) был перемещен в указанную позицию, представленный процесс, проиллюстрированный на Фиг. 11, заканчивается.
[0063] Фиг. 12 представляет блок-схему представленного процесса, следуя которой может быть реализовано представленное устройство управления 126, проиллюстрированное на Фиг. 2, для предоставления диагностической информации, связанной с клапаном (например, 212). Представленный процесс начинается, когда устройство управления (например, представленное устройство управления 126) контролирует и/или управляет клапаном (например, 212) (блок 1200). Представленный процесс содержит в себе выяснение того, действительно ли клапан (например, 212) не смог двигаться, как ожидалось (например, во время процедуры испытания и/или в результате любого другого сигнала управления) (блок 1202). Если выяснено, что клапан (например, 212) не смог двигаться, как ожидалось, представленный процесс обеспечивает соответствующую диагностическую информацию (блок 1204). В некоторых примерах, диагностическая информация включает любые причины и/или возможные объяснения обнаруженного сбоя в движении клапана, возможные действия по устранению неисправности клапана или аварийную сигнализацию, соответствующую обнаруженной неисправности. В некоторых примерах, диагностическая информация предоставляется с помощью дисплея, который является частью интерфейса оператора (например, 202) управляющего устройства (например, 126). Дополнительно или альтернативно, диагностическая информация может быть предоставлена любому другому устройству (например, центральному компьютеру системы управления) с использованием коммуникационных интерфейсов (например, 204) устройства управления (например, 126).
[0064] После того, как диагностическая информация предоставлена, представленный процесс выясняет, находится ли клапан (например, 212) в одной и той же позиции в течение слишком долгого периода (например, как в заранее предусмотренной позиции, установленной оператором) (блок 1206). В качестве альтернативы, если это выяснено (в блоке 1202), что клапан (например, 212) перемещается должным образом (например, как ожидалось), представленный процесс переходит непосредственно к блоку 1206. Если клапан (например, 212) был в одной и той же позиции слишком долго (блок 1206), представленный процесс предоставляет соответствующую диагностическую информацию (блок 1208). Диагностическая информация может быть связана с продолжительностью неподвижности клапана (например, 212) относительно того, как часто оператору требуется переместить клапан (например, 212) (например, на основе предварительно настроенного промежутка времени). Таким образом, операторы могут быть проинформированы о необходимости применить или застопорить клапан для того, чтобы убедиться в его нормальной работе и/или снижения риска того, что клапан (например, 212) застрянет.
[0065] После предоставления диагностической информации (в блоке 1208), представленный процесс выясняет, просрочено ли техническое обслуживание клапана (например, 212) (например, на основе расписания, назначенного оператором) (блок 1210). С другой стороны, если выяснено, (в блоке 1206), что клапан (например, 212) не находился в одном и том же положении слишком долго, представленный процесс, проиллюстрированный на Фиг. 12, переходит непосредственно к блоку 1210. Если выясняется, что техническое обслуживание клапана (например, 212) просрочено (блок 1210), представленный процесс предоставляет соответствующую диагностическую информацию (блок 1212). После предоставления диагностической информации, представленный процесс переходит к блоку 1214 для выяснения, следует ли продолжать контроль и/или управление клапаном (например, 212). Подобным образом, если выяснено (в блоке 1210), что техническое обслуживание не просрочено, представленный процесс переходит непосредственно к блоку 1214 для выяснения, следует ли продолжать контроль и/или управление клапаном (например, 212) (блок 1214). Если представленный процесс предписывает продолжение контроля и/или управления клапаном (например, 212), представленный процесс возвращается к блоку 1200, где представленный процесс может быть повторен. Если предписано не продолжать контроль и/или управление клапаном (например, 212), представленный процесс на Фиг. 12 заканчивается.
[0066] Фиг. 13 является схематической иллюстрацией примера процессорной платформы 1300, которая может быть использована и/или запрограммирована на выполнение представленного процесса, проиллюстрированного на Фиг. 6-12, по реализации представленного устройства управления 126, проиллюстрированного на Фиг. 2, и/или, в более общем смысле, представленной системы 100, проиллюстрированной на Фиг. 1. Платформа 1300 в качестве актуального примера содержит процессор 1312. Например, процессор 1312 может быть реализован с помощью одного или более микропроцессоров или контроллеров любого затребованного типа или изготовителя.
[0067] Процессор 1312 содержит локальную память 1313 (например, кэш) и находится в коммуникации с основной памятью, содержащей энергозависимую память 1314 и энергонезависимую память 1316 через шину 1318. Энергозависимая память 1314 может быть реализована с помощью Синхронного Динамического ОЗУ (SDRAM), Динамического ОЗУ (DRAM), RAMBUS Динамического Запоминающего Устройства (RDRAM) и/или любого другого типа устройства памяти с произвольным доступом. Энергонезависимая память 1316 может быть реализована с помощью флэш-памяти и/или любого другого требуемого типа запоминающего устройства. Доступ к оперативной памяти 1314 и 1316 управляется контроллером памяти.
[0068] Процессорная платформа 1300 также содержит схему интерфейса 1320. Схема интерфейса 1320 может быть реализована посредством любого типа стандарта интерфейса, такого, как интерфейс Ethernet, Универсальной Последовательной Шины (USB) и/или интерфейс PCI express. Одно или более устройств ввода 1322 подключены к интерфейсной схеме 1320. Устройства ввода 1322 позволяют пользователю вводить данные и команды в процессор 1312. Устройства ввода могут быть реализованы, например, с помощью клавиатуры, мыши, сенсорного экрана, сенсорной панели, шарового манипулятора, цилиндрического манипулятора и/или системы распознавания голоса. Одно или несколько выходных устройств 1324 также подключены к схеме интерфейса 1320. Выходные устройства 1324 могут быть реализованы, например, с помощью устройств отображения (например, жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), принтера и/или громкоговорителя). Схема интерфейса 1320, таким образом, как правило, содержит карту графического драйвера.
[0069] Схема интерфейса 1320 также содержит устройство коммуникации, например, модем или сетевую карту, чтобы способствовать обмену данными с внешними компьютерами через компьютерную сеть 1326 (например, Ethernet подключение, цифровая абонентская линия (DSL), телефонная линия, коаксиальный кабель, сотовая телефонная система и т.д.).
[0070] Процессорная платформа 1300 также содержит одно или несколько устройств хранения данных большой емкости 1328 для хранения программного обеспечения и данных. Примеры таких устройств хранения данных 1328 включают флоппи-дисководы, жесткие диски, компакт-диски и цифровые универсальные диски (DVD).
[0071] Закодированные команды 1332 для реализации представленных процессов, проиллюстрированных на Фиг. 6-12, могут быть сохранены в запоминающем устройстве 1328, в энергозависимой памяти 1314, в энергонезависимой памяти 1316 и/или на съемном носителе данных, таком как компакт-диск (CD) или DVD.
[0072] Хотя конкретные примеры способов, устройств и промышленных изделий и были описаны в данном документе, объем данного патента этим не ограничивается. Такие примеры относятся к не ограничивающим иллюстративным примерам. Напротив, этот патент охватывает все способы, устройства и промышленные изделия безусловно подпадающие под объем прилагаемой формулы изобретения в буквальном смысле или в соответствии с теорией эквивалентов.



Раскрыты способ и устройство для контроля и/или управления пневматическим приводом. Устройство содержит корпус; процессор, расположенный внутри корпуса, для выполнения управляющего приложения; датчик положения, расположенный внутри корпуса, для контроля положения клапана, соединенного с пневматическим приводом, причем датчик положения обеспечивает управляющее приложение информацией о положении клапана, и бистабильный клапан, расположенный внутри корпуса, для обеспечения указанного пневматического привода пневматическим сигналом с помощью источника пневматической энергии, предусмотренного для бистабильного клапана. Бистабильный клапан подлежит управлению с помощью управляющего приложения на основе: информации о положении или сигнала управления от отдельного устройства в системе управления процессом, для обеспечения указанного пневматического привода пневматическим сигналом и для высвобождения бистабильного клапана в ответ на пневматический выхлоп, выпущенный из бистабильного клапана. Обеспечивается возможность полного контроля и локального управления клапаном. 3 н. и 21 з.п. ф-лы, 16 ил.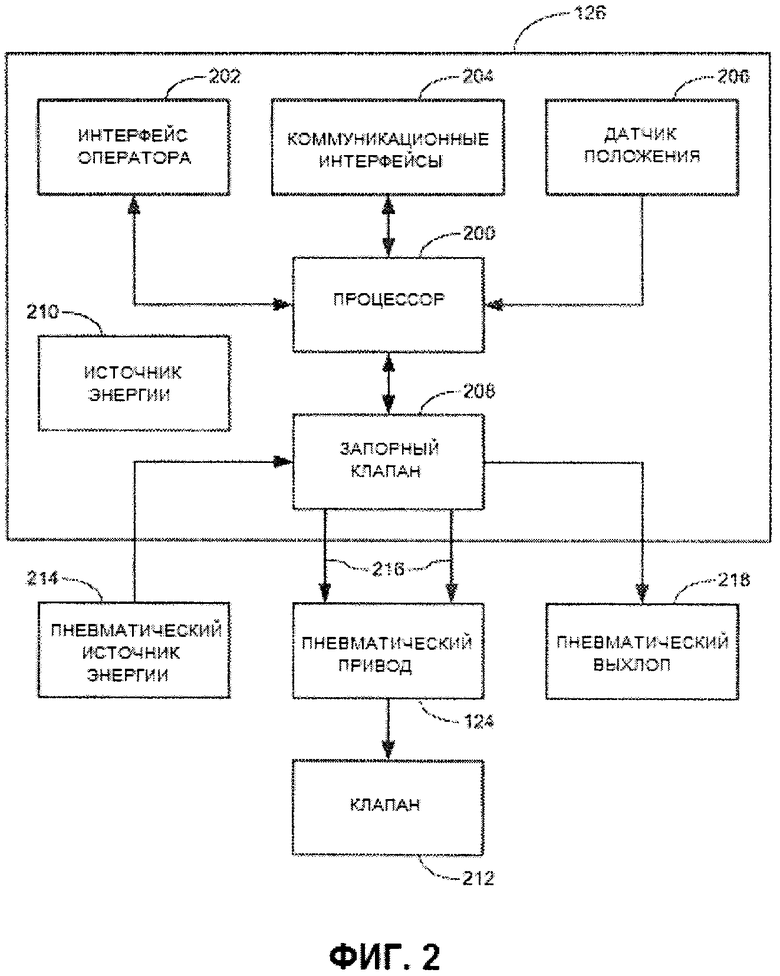
1. Устройство для контроля и/или наблюдения за пневматическим приводом, содержащее:
корпус;
процессор, расположенный внутри корпуса, для выполнения управляющего приложения;
датчик положения, расположенный внутри корпуса, для контроля положения клапана, соединенного с пневматическим приводом, причем датчик положения обеспечивает управляющее приложение информацией о положении клапана; и
бистабильный клапан, расположенный внутри корпуса, для обеспечения указанного пневматического привода пневматическим сигналом с помощью источника пневматической энергии, предусмотренного для бистабильного клапана, причем бистабильный клапан подлежит управлению с помощью управляющего приложения на основе по меньшей мере одного из следующего: информации о положении или сигнала управления от отдельного устройства в системе управления процессом, для обеспечения указанного пневматического привода пневматическим сигналом и для высвобождения бистабильного клапана в ответ на пневматический выхлоп, выпущенный из бистабильного клапана.
2. Устройство по п. 1, в котором корпус устанавливается на пневматическом приводе.
3. Устройство по любому из предшествующих пунктов, дополнительно содержащее беспроводный приемопередатчик для беспроводной коммуникации в системе управления процессом.
4. Устройство по любому из пп. 1 или 2, которое предназначено для обнаружения ошибки в его работе или в клапане, причем устройство управляет приводом для перемещения клапана вплоть до реакции клапана о состоянии неисправности в ответ на обнаружение ошибки.
5. Устройство по любому из пп. 1 или 2, в котором ошибка базируется по меньшей мере на одной из внутренних неисправностей устройств, сбоя коммуникации, состояния блокировки процесса или состояния каскадного цикла управления.
6. Устройство по любому из пп. 1 или 2, в котором состояние неисправности клапана соответствует любому из следующих: закрытому положению, открытому положению, последнему текущему положению с нулевым пневматическим выходом, предопределенному положению с нулевым пневматическим выходом или закрытому положению при нулевом пневматическом выходе.
7. Устройство по любому из пп. 1 или 2, дополнительно содержащее интерфейс оператора.
8. Устройство по любому из пп. 1 или 2, которое должно выполнять проверку перемещения клапана, перемещая клапан в положение испытания и возвращая клапан в исходное положение.
9. Устройство по любому из пп. 1 или 2, которое должно осуществлять проверки перемещения клапана на основе расписания.
10. Устройство по любому из пп. 1 или 2, которое должно предоставлять диагностическую информацию, когда по меньшей мере одна из неисправностей клапана - это невозможность перемещения так, как это предусмотрено на основе пневматического сигнала, причем клапан остается в том же положении в течение первого предопределенного количества времени, или уже прошло больше, чем второе предопределенное количество времени с тех пор, как было выполнено техническое обслуживание любого из следующего: указанного устройства, пневматического привода или клапана.
11. Устройство по любому из пп. 1 или 2, в котором управляющее приложение автоматически калибрует устройство, выясняя диапазон перемещения клапана и пределы диапазона.
12. Устройство по любому из пп. 1 или 2, в котором пневматический сигнал предназначен по меньшей мере для одного из следующего: перемещения клапана после периода задержки или изменения положения клапана в течение предопределенного периода времени.
13. Способ для контроля и/или наблюдения за пневматическим приводом, включающий:
настройку управляющего процесса с помощью процессора в устройстве управления, установленного на пневматическом приводе, соединенном с клапаном, причем устройство управления содержит датчик положения;
контроль положения клапана с помощью датчика положения; и
обеспечение поступления пневматического сигнала к приводу, используя устройство управления, для перемещения клапана, причем пневматический сигнал устанавливается на основании настроек управления и контролируемого положении клапана, причем поступление пневматического сигнала к пневматическому приводу обеспечивают посредством бистабильного клапана с помощью источника пневматической энергии, предусмотренного для бистабильного клапана, причем бистабильным клапаном управляют с помощью процессора на основе по меньшей мере одного из следующего: контролируемого положения клапана или сигнала управления от отдельного устройства в системе управления процессом, для обеспечения указанного пневматического привода пневматическим сигналом и для высвобождения бистабильного клапана в ответ на пневматический выхлоп, выпущенный из бистабильного клапана.
14. Способ по п. 13, дополнительно включающий испытание перемещения клапана с помощью:
обеспечения поступления пневматического сигнала к приводу, используя устройство управления, для перемещения клапана в положение испытания;
обеспечения поступления другого пневматического сигнала к приводу, используя устройство управления, для возврата клапана в рабочее положение;
проверки, перемещается ли клапан на основе пневматических сигналов, как это предусмотрено.
15. Способ по любому из пп. 13 или 14, в котором настройки управления предназначены для назначения расписания испытаний перемещения клапана.
16. Способ по любому из пп. 13 или 14, дополнительно включающий:
получение настроек управления через любое из перечисленных: интерфейс оператора устройства управления, центральный компьютер системы управления процессом, полевое устройство в системе управления процессом или карманный полевой коммуникатор; и
передачу результатов контроля положения клапана любому из перечисленных: интерфейсу оператора устройства управления, центральному компьютеру системы управления процессом или карманному устройству конфигурации.
17. Способ по любому из пп. 13 или 14, в котором настройки управления и результаты передаются беспроводным способом между центральным компьютером системы управления процессом и устройством управления.
18. Способ по любому из пп. 13 или 14, в котором пневматический сигнал устанавливается устройством управления.
19. Способ по любому из пп. 13 или 14, дополнительно включающий:
обнаружение ошибки в работе устройства управления, причем ошибка должна основываться по меньшей мере на одном из перечисленного: внутренней неисправности устройства, сбое коммуникации, состоянии блокировки процесса или состоянии каскадного цикла управления; и
назначение состояния неисправности клапана на основе ошибки, причем состояние неисправности клапана соответствует любому из перечисленных: закрытое положение, открытое положение, последнее текущее положение с нулевым пневматическим выходом, предопределенное положение с нулевым пневматическим выходом или закрытое положение при нулевом пневматическим выходе.
20. Способ по любому из пп. 13 или 14, дополнительно включающий: переключение устройства управления в режим "не исправен".
21. Устройство управления пневматическим приводом, содержащее:
средства для обработки настроек управления в устройстве управления, установленном на пневматическом приводе, соединенном с клапаном, причем устройство управления содержит датчик положения;
средства для контроля положения клапана с использованием датчика положения; и
средства для обеспечения подачи пневматического сигнала приводу с использованием устройства управления для перемещения клапана, причем пневматический сигнал устанавливается на основании настроек управления и контролируемого положения клапана, причем поступление пневматического сигнала к пневматическому приводу обеспечивается посредством бистабильного клапана с помощью источника пневматической энергии, предусмотренного для бистабильного клапана, причем процессор выполнен с возможностью управления бистабильным клапаном на основе по меньшей мере одного из следующего: контролируемого положения клапана или сигнала управления от отдельного устройства в системе управления процессом, для обеспечения указанного пневматического привода пневматическим сигналом и для высвобождения бистабильного клапана в ответ на пневматический выхлоп, выпущенный из бистабильного клапана.
22. Устройство управления пневматическим приводом по п. 21, дополнительно содержащее средства для выполнения испытаний клапана с использованием:
подачи пневматического сигнала к приводу, используя устройство управления, для перемещения клапана в положение испытания;
подачи другого пневматического сигнала приводу, используя устройство управления, для возврата клапана в рабочее положение; и
проверки предусмотренного перемещения клапана на основе пневматических сигналов.
23. Устройство управления пневматическим приводом по любому из пп. 21 или 22, в котором настройки управления и результаты передаются беспроводным способом между центральным компьютером системы управления процессом и устройством управления.
24. Устройство управления пневматическим приводом по любому из пп. 21 или 22, в котором пневматический сигнал устанавливается устройством управления.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| US 5970430 A, 19.10.1999 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| УСОВЕРШЕНСТВОВАННЫЙ СИЛОВОЙ ПРИВОД КЛАПАНА | 2007 |
|
RU2461039C2 |
| US 5794641 A, 18.08.1998 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

