Уровень техники
Магнитомеханические резонаторы хорошо известны и на протяжении десятилетий используются в области безопасности в торговле. Кроме того, магнитомеханические резонаторы (MMR) также подходят для использования применительно к закапываемой в землю инфраструктуре вследствие их низкой стоимости, низкого профиля и гибких компонентов. Они могут быть выполнены в виде отдельных маркеров или физически прикрепляться к подземному трубопроводу или подземной коммуникации. Они могут использоваться для точной идентификации закопанного объекта и его местоположения. Например, см. документы US 2012/068823; US 2012/0325359 и US 2013/0099790, каждый из которых во всей полноте включен в настоящий документ посредством ссылки.
Тем не менее, диапазон детектирования и стабильность частоты таких MMR могут быть ограничены.
Сущность изобретения
В первом аспекте настоящего изобретения магнитомеханическое резонаторное устройство содержит множество ферромагнитных элементов, расположенных в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец и второй продольный конец. Первый магнитный элемент смещения расположен вблизи первого продольного конца этажерочной структуры, при этом второй магнитный элемент смещения расположен вблизи второго продольного конца этажерочной структуры. Зажимной элемент расположен в центральной продольной области этажерочной структуры для обеспечения ограничения перемещения множества ферромагнитных элементов относительно друг друга в центральной продольной области, при этом первый и второй концы выполнены с возможностью углового расхождения.
Вышеизложенное описание сущности настоящего изобретения не является описанием каждого изображенного воплощения или каждого варианта реализации настоящего изобретения. Эти воплощения более точно представлены на фигурах и в последующем подробном описании.
Краткое описание чертежей
Далее настоящее изобретение будет описано, отчасти, посредством ссылок на его неограничивающие примеры, а также со ссылками на чертежи, на которых:
Фиг. 1А - частичный вид сбоку магнитомеханического резонаторного устройства согласно первому аспекту настоящего изобретения.
Фиг. 1В - частичный вид сбоку альтернативного зажимного элемента согласно другому аспекту настоящего изобретения.
Фиг. 1С - частичный вид сбоку магнитомеханического резонаторного устройства согласно другому аспекту настоящего изобретения.
Фиг. 1D - покомпонентный вид магнитомеханического резонаторного устройства согласно другому аспекту настоящего изобретения.
Фиг. 2А - частичный вид сбоку кластерного магнитомеханического резонаторного устройства согласно другому аспекту настоящего изобретения.
Фиг. 2В - частичный вид сбоку кластерного магнитомеханического резонаторного устройства согласно еще одному аспекту настоящего изобретения.
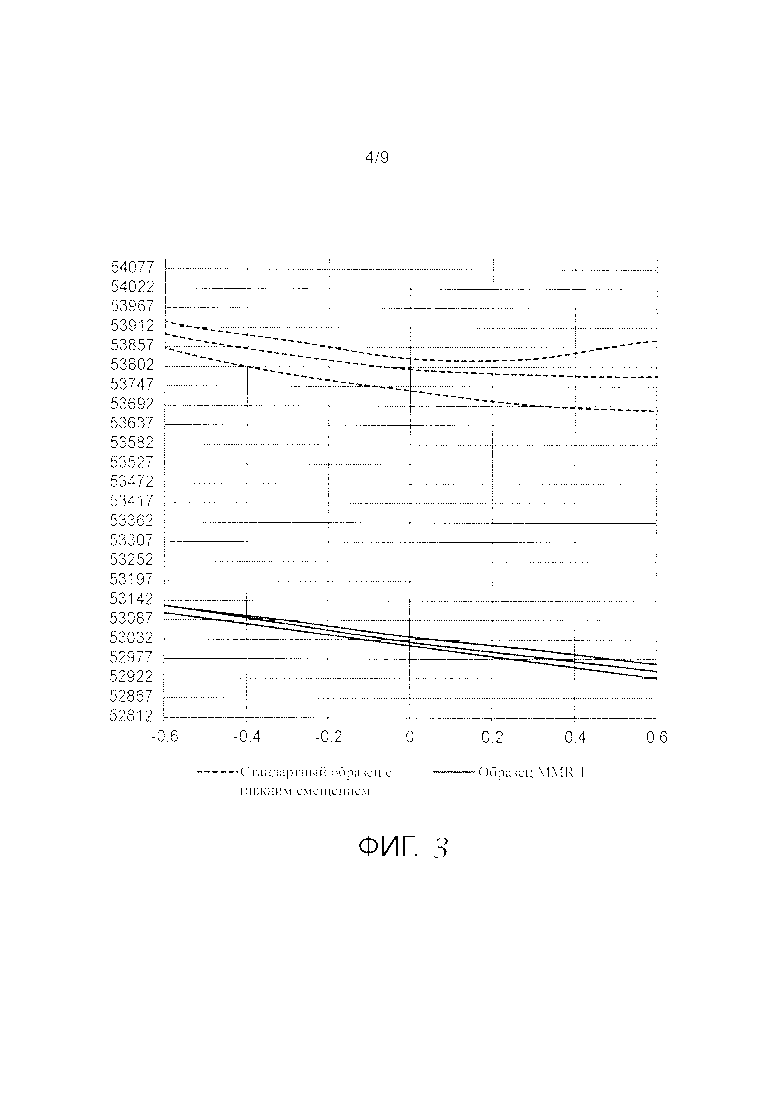
Фиг. 3 - график, на котором показано сравнение экспериментального кластерного MMR устройства и кластера из двух стандартных (с нижним смещением) MMR устройств (в отношении резонансной частоты (Гц) относительно смещения магнитного поля (Э)).
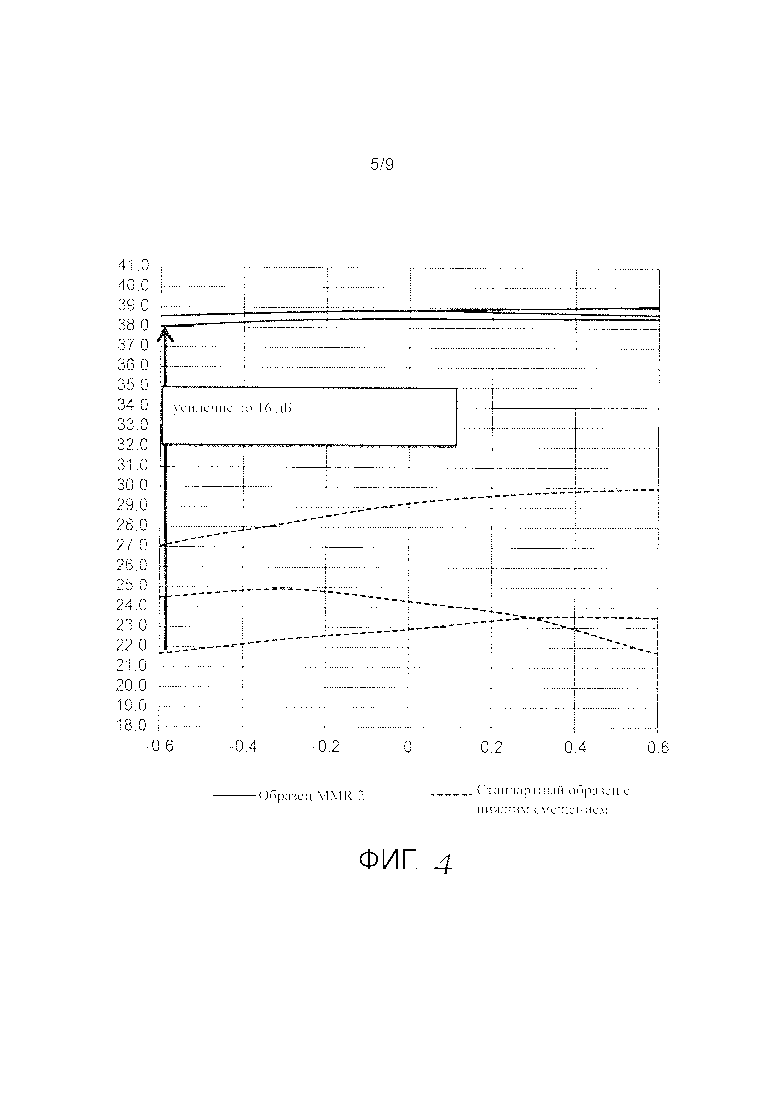
Фиг. 4 - график, на котором показано сравнение экспериментального кластерного MMR устройства и кластера из двух стандартных (с нижним смещением) MMR устройств (в отношении усиления сигнала (дБ) относительно смещения магнитного поля (Э)).
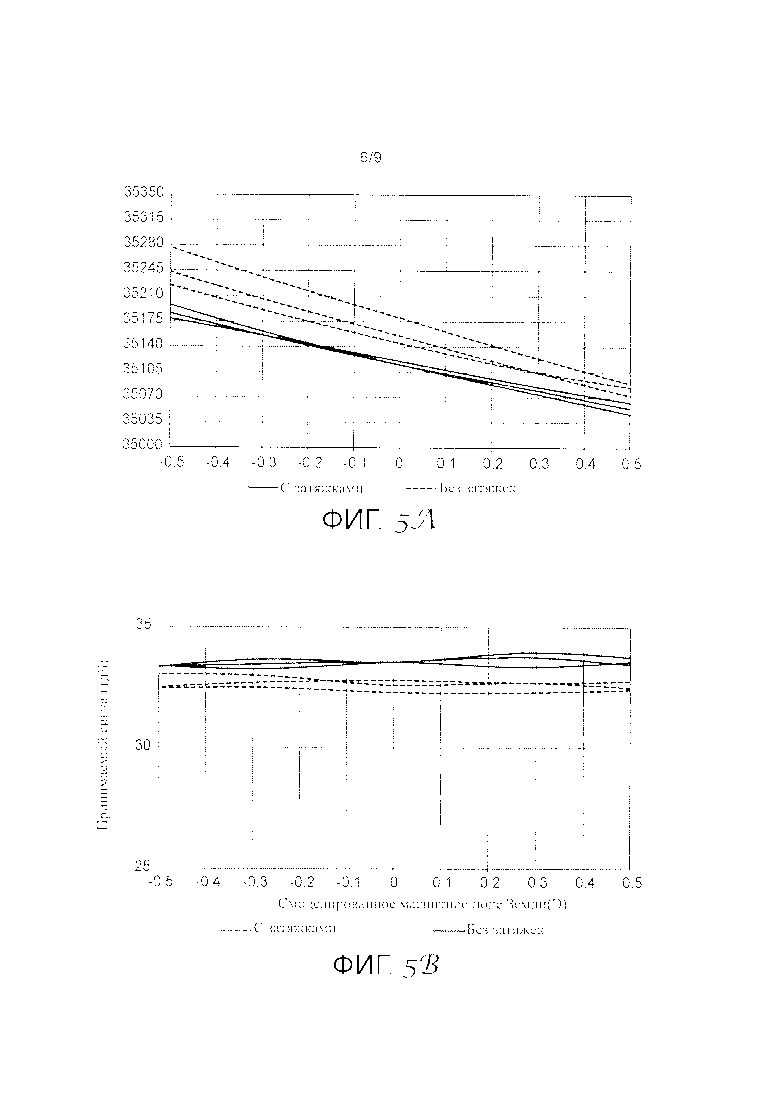
Фиг. 5А и 5В - графики, на которых показаны, соответственно, зависимости резонансной частоты (Гц) и усиления сигнала (дБ) от смещения магнитного поля (Э) для экспериментального кластерного MMR устройства.
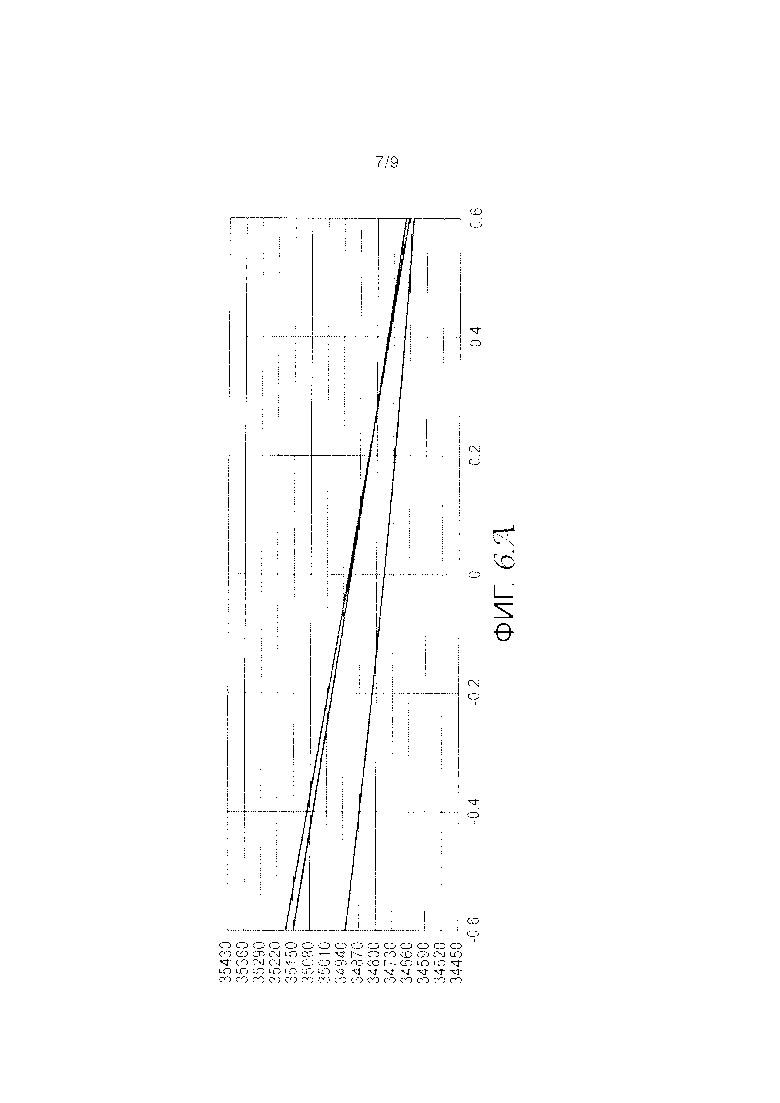
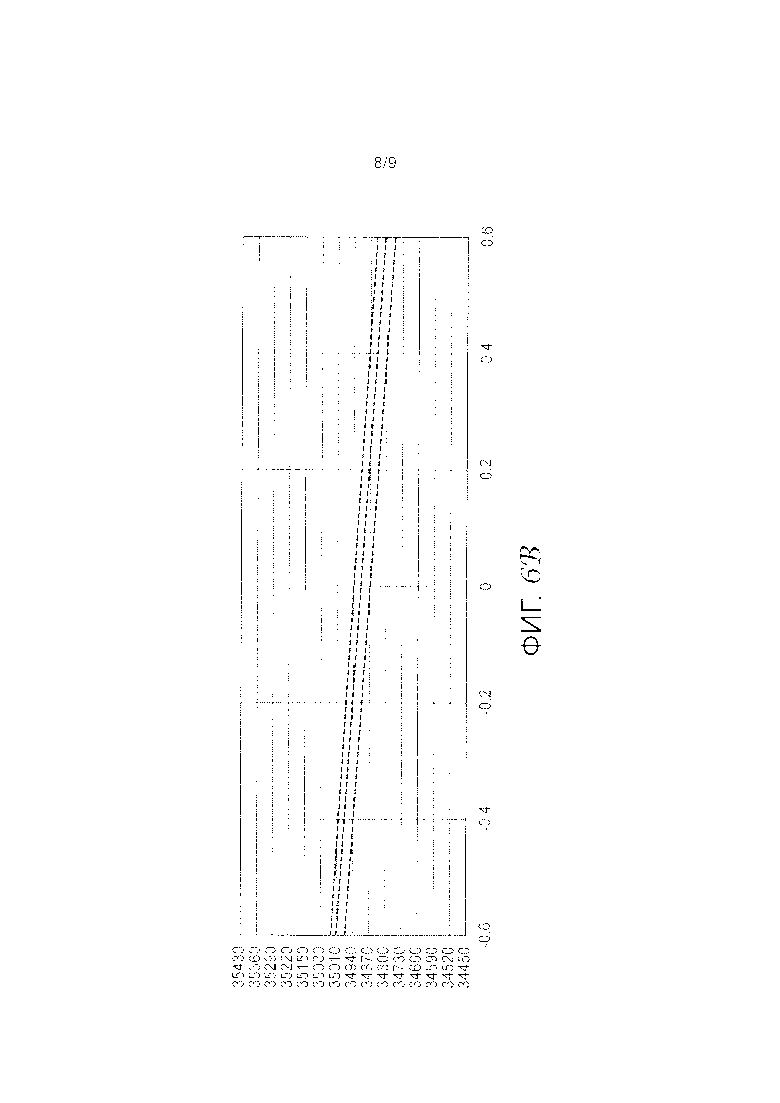
Фиг. 6А и 6В - сравнение между экспериментальным кластерным MMR устройством и кластером из двух MMR устройств, имеющих конструкцию с нижним смещением (в отношении резонансной частоты (Гц) относительно смещения магнитного поля (Э) при длине полоски резонатора, составляющей 60 мм).
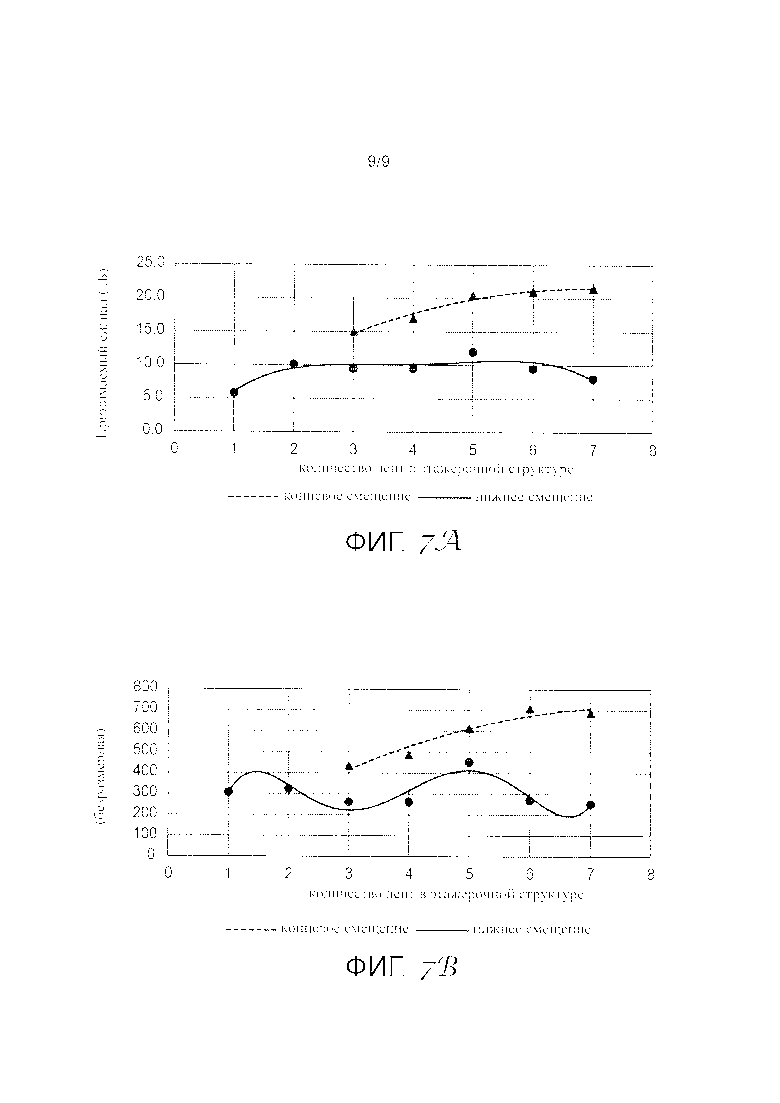
Фиг. 7А - график усиления принимаемого сигнала, при этом фиг. 7В - график зависимости добротности магнитомеханического резонанса (резонанс Q) от количества полосок резонатора, используемых для каждого маркера на основе MMR.
Хотя в настоящее изобретение могут быть внесены различные изменения и оно допускает альтернативные формы реализации, конкретные его воплощения показаны в качестве примера на чертежах и описаны подробно далее. Однако, следует понимать, что это не следует рассматривать как ограничение настоящего изобретения конкретными описанными воплощениями. Наоборот, настоящее изобретение охватывает все изменения, эквиваленты и альтернативы, находящиеся в пределах объема настоящего изобретения, определенного прилагаемой формулой изобретения.
Подробное описание воплощений
В последующем описании имеется ссылка на прилагаемые чертежи, которые образуют его часть, и на которых показаны в качестве примера конкретные воплощения, в которых настоящее изобретение может быть реализовано на практике. В этом отношении термины, относящиеся к направлению, такие как «верхний», «нижний», «передний», «задний», «ведущий», «впереди», «замыкающий» и т.д., используются со ссылкой на ориентацию описываемой фигуры (фигур). Поскольку компоненты воплощений настоящего изобретения могут быть расположены в множестве различных ориентаций, термины, относящиеся к направлению, используются в целях пояснения, но не ограничения. Следует понимать, что могут применяться и другие воплощения, при этом могут быть сделаны конструкционные или логические изменения без отклонения от объема настоящего изобретения. Таким образом, нижеследующее подробное описание не следует рассматривать в ограничительном смысле; объем настоящего изобретения определяется приложенной формулой изобретения.
В настоящем документе описан маркер на основе магнитомеханического резонатора (MMR) с увеличенной дальностью приема сигнала, предназначенный для определения местоположения и идентификации закопанных объектов. Такой магнитомеханический резонатор может являться подходящим для использования в закапываемой инфраструктуре вследствие его низкой стоимости, низкого профиля и гибких компонентов. Маркер на основе MMR может представлять собой отдельный маркер, он может физически крепиться к подземному объекту, такому как трубопровод или другие коммуникации, или он может крепиться к другому устройству или носителю, такому как предупредительная или сигнальная лента, расположенному на подземном объекте или вблизи него. В частности, маркеры на основе MMR, описанные в настоящем документе, могут обеспечивать подстройку частоты, высокую стабильность частоты, высокое накопление энергии, а также низкий профиль в комбинации с увеличенным диапазоном детектирования, в сравнении со стандартными маркерами на основе MMR.
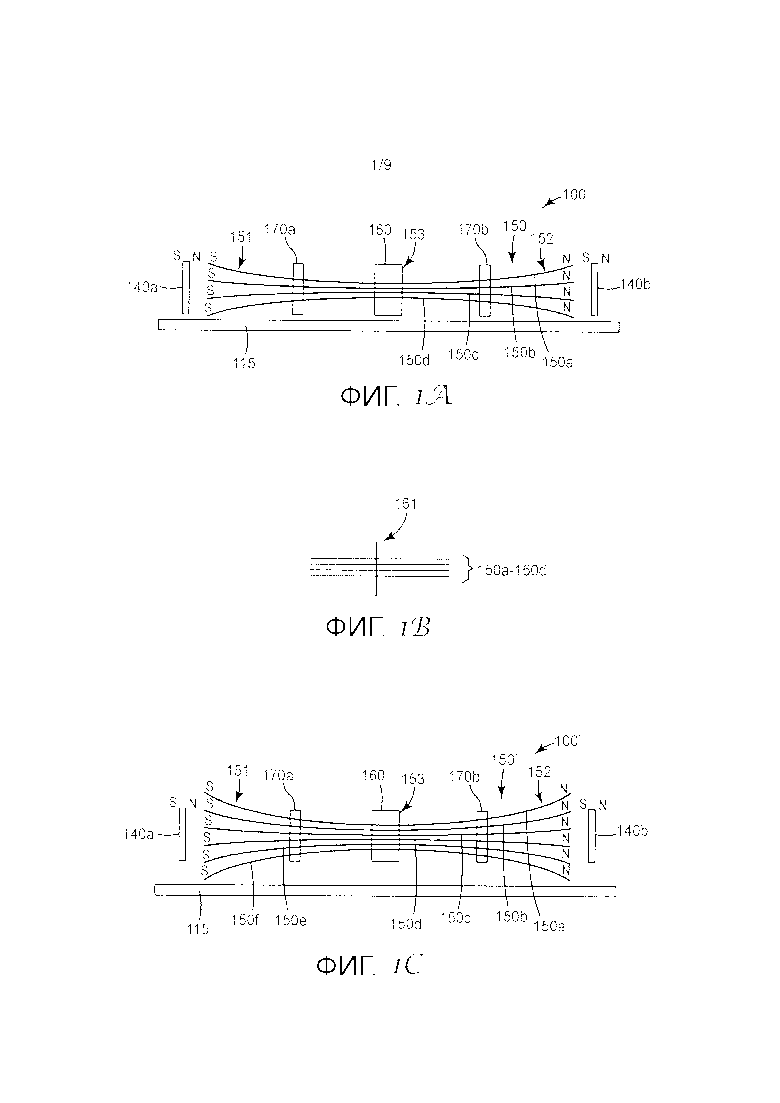
На фиг. 1А показан первый аспект настоящего изобретения - маркер 100 на основе MMR. Маркер 100 на основе MMR содержит множество ферромагнитных элементов 150 (также называемых в настоящем документе полосками или лентами резонатора). В этом воплощении ферромагнитные элементы содержат четыре полоски 150a-150d резонатора, расположенные в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец 151 и второй продольный конец 152. Хотя четыре полоски резонатора показаны входящими в состав элемента 150 в виде этажерочной структуры, множество ферромагнитных элементов может составлять этажерочную структуру из 2, 3, 4, 5, 6, 7, 8 или более полосок резонатора, в зависимости от условий. Например, на фиг. 1С показан маркер 100' на основе MMR, включающий этажерочную структуру из шести ферромагнитных элементов (полоски 150a-150f резонатора).
Вернемся снова к фиг. 1А; полоски 150а-150d резонатора могут быть уложены непосредственно друг поверх друга или, альтернативно, одна или более проставок, таких как клеевые точки (не показаны), могут быть расположены между полосками резонатора в центральной продольной области 153 этажерочной структуры 150, вследствие чего указанные полоски не контактируют друг с другом непосредственно в области 153.
В этом аспекте каждая из полосок 150a-150d резонатора содержит ферромагнитный материал с магнитострикционными свойствами, такой как аморфный магнитный сплав, или кристаллический материал, такой как Metglas 2826 MB, 2605SA1 или 2605S3A, изготавливаемый компанией Metglas, Inc., Conway, S.C. Полоски 150a-150d резонатора также могут содержать материал, подобный материалам, доступным от компании Vacuumschmelze GmbH, Hanau, Germany. Физические размеры, такие как длина, ширина и толщина резонаторной полоски (полосок) могут быть выбраны в зависимости от требуемой частоты отклика. Ленты могут быть отожженными или неотожжеными. В случае полосок/лент, изогнутых вдоль длинной оси, этажерочная структура из резонирующих магнитных элементов может включать некоторые ленты, ориентированные в отогнутом вверх положении, тогда как остальные ленты ориентированы в отогнутом вниз положении, таким образом способствуя обеспечению уменьшения потенциального сдвига частоты при вращении вдоль длинной оси в горизонтальной ориентации. В некоторых аспектах каждый из ферромагнитных элементов содержит ферромагнитную металлическую полоску длиной приблизительно от 25 мм до 40 мм. В другом аспекте каждый из ферромагнитных элементов содержит ферромагнитную металлическую полоску длиной приблизительно от 40 мм до 65 мм.
В отличие от стандартных конфигураций маркеров на основе MMR, в которых, как правило, обеспечены магниты смещения, расположенные под, над или сбоку полоски или полосок резонатора, маркер 100 на основе MMR содержит магнитные элементы смещения, расположенные у каждого конца этажерочной структуры из элементов резонатора. Как показано на фиг. 1А, первый магнитный элемент смещения, такой как магнит 140а смещения, расположен вблизи конца 151 этажерочной структуры из элементов резонатора, при этом второй магнитный элемент смещения, такой как магнит 140b смещения, расположен вблизи конца 152 этажерочной структуры из элементов резонатора. Магнитные оси магнитов 140а, 140b смещения установлены в одном общем направлении вдоль длинной оси этажерочной структуры из лент. Такая ориентация магнитного элемента смещения может способствовать уменьшению воздействия силы тяжести на этажерочную структуру из ферромагнитных элементов (например, если магнит смещения расположен сверху одного или более ферромагнитных элементов, сила тяжести будет оттягивать элемент (элементы) от магнита смещения). При конфигурации с концевым смещением, описанной в настоящем документе, даже если маркер на основе MMR перевернут верхней стороной вниз (повернут на 180 градусов относительно ориентации, показанной на фиг. 1А), на сигнал от этажерочной структуры 150 из элементов резонатора не будет оказываться существенного влияния.
В воплощении, показанном на фиг. 1А, магниты 140а, 140b смещения могут быть пространственно разнесены с соответствующими концами 151, 152 этажерочной структуры из лент на расстоянии приблизительно 0,5 мм - 10 мм, предпочтительно приблизительно 7 мм - 8 мм. В некоторых аспектах для усиления смещения магниты смещения могут быть расположены ближе к концам этажерочной структуры из лент, например, на расстоянии от приблизительно 0,5 мм до приблизительно 1 мм.
Каждый из магнитных элементов 140а, 140b смещения может содержать постоянный магнит или магнитно-жесткую или магнитно-полужесткую металлическую полоску. В настоящем изобретении может использоваться магнитно-жесткий материал для обеспечения магнитного смещения, который не поддается оперативной замене, поскольку его характеристики смещения не имеют тенденции к изменению в случае закапывания под землей. Магнитный слой 170 смещения может быть изготовлен из любого магнитного материала, обладающего достаточной остаточной намагниченностью при намагничивании, для обеспечения должного смещения резонаторов, а также достаточной магнитной коэрцитивностью для обеспечения отсутствия изменения магнитных свойств в нормальных рабочих условиях. Может быть использован коммерчески доступный магнитный материал, такой как Amokrome™ III от The Arnold Engineering Company, Marengo, 111., хотя другие материалы могут быть использованы с тем же успехом. Например, в одном конкретном аспекте размеры магнитов смещения (неодимовые магниты, доступные от K&J Magnetics Inc.) могут быть следующими: 1/16'' (толщина), 1/8'' (высота) и  '' (ширина), при этом намагниченность реализована по толщине. Разумеется, размеры магнита смещения могут варьироваться в зависимости от размера и ширины элемента резонатора. Например, в случае линейных или прямых магнитов каждый из магнитных элементов 140а, 140b смещения может иметь магнитные полюса - по одному на каждом конце, как показано обозначениями N и S на фиг. 1А.
'' (ширина), при этом намагниченность реализована по толщине. Разумеется, размеры магнита смещения могут варьироваться в зависимости от размера и ширины элемента резонатора. Например, в случае линейных или прямых магнитов каждый из магнитных элементов 140а, 140b смещения может иметь магнитные полюса - по одному на каждом конце, как показано обозначениями N и S на фиг. 1А.
В другом аспекте маркер 100 на основе MMR может содержать концентраторы поля, расположенные между магнитными элементами смещения и каждым из концов этажерочной структуры из элементов резонатора. Концентраторы поля помогают собирать и направлять магнитное поле от магнитных элементов смещения к концам этажерочной структуры из элементов резонатора. Такая конфигурация может быть в меньшей степени подвержена ошибкам позиционирования и обеспечивает лучшее дистанцирование/отделение от концов этажерочной структуры из элементов резонатора, и при этом она может способствовать обеспечению более прямых линий магнитной индукции и меньшей силе магнитного притяжения. Кроме того, использование концентратора поля делает возможным использование более мелких постоянных магнитов в качестве магнитных элементов смещения, что способствует снижению стоимости компонентов.
Также, маркер 100 на основе MMR может содержать зажимной элемент 160, расположенный в центральной продольной области 153 этажерочной структуры 150 из элементов резонатора. Зажимной элемент 160 ограничивает перемещение ферромагнитных элементов 150a-150d относительно друг друга в месте зажимного элемента. Зажимной элемент 160 может содержать жесткий элемент или подобную рамочной конструкцию, как показано на фиг. 1А. В дополнительном аспекте зажимной элемент 160 может быть сформирован из магнитного материала или набора небольших магнитов. Альтернативно, как показано на фиг. 1В, зажимной элемент 160 может содержать штифт 161, вставляемый через каждую полоску 150a-150d. Использование центрального штифта 161 в качестве зажимного элемента также может способствовать предотвращению латерального перемещения одного или более элементов резонатора в направлении к одному из концевых магнитов смещения. Если один или более из отдельных элементов резонатора перемещается немного от точного центрального положения, сила притягивания возрастает и со временем притягивает некоторые из отдельных элементов резонатора к концу, что может снижать Q и мощность сигнала.
В случае расположения магнитов смещения, показанного на фиг. 1А, ленты/полоски 150a-150d в этажерочной структуре 150 резонатора намагничиваются при воздействии магнитного поля смещения с каждого конца. Эта конфигурация создает силы отталкивания между всеми лентами/полосками 150a-150d на каждом конце, обеспечивая угловое расхождение или раскрытие концов лент/полосок при удерживании вместе этажерочной структуры резонатора в центральной области с помощью зажимного элемента 160, в то же время все концы лент подвержены воздействию силы притягивания к магнитным элементам смещения вдоль длинной оси ленты/полоски. Это создает тянущее усилие вдоль продольной оси лент/полосок и поперек силы отталкивания, обеспечивая подвешенное в воздухе состояние всех концов лент в концевых областях 151, 152 с минимальным поверхностным контактом или с отсутствием такового между лентами/полосками в концевых областях 151, 152 (предполагается наличие поверхностного контакта в центральной области 153 при удерживании посредством зажимного элемента 160, за исключением случаев, когда между лентами/полосками используются проставки) независимо от первоначальной изогнутости лент/полосок 150a-150d.
В одном аспекте зажимной элемент 160 выполнен с возможностью подвешивания каждого ферромагнитного элемента относительно друг друга в центральной продольной области 153. В другом аспекте зажимной элемент 160 может содержать амортизирующий элемент для способствования уменьшению перемещения этажерочной структуры из элементов резонатора при воздействии на MMR значительных вибраций во время транспортировки и установки. В еще одном альтернативном аспекте комбинация клеевых точек или механического зажима с набором зажимов с постоянными магнитами может обеспечивать краткосрочную устойчивость при тряске, падении и т.п., в то же время обеспечивая постоянное удерживание с помощью постоянных магнитов.
Аналогично, при воздействии внешнего магнитного поля на определенной частоте полоски резонатора взаимодействуют с магнитным полем и преобразовывают магнитную энергию в механическую энергию в виде магнитомеханических осцилляций полосок резонатора. Как показано на фиг. 1А, поскольку центральная часть этажерочной структуры 150 зафиксирована от перемещения посредством зажимного элемента 160, первый и второй концы каждого элемента 150a-150d резонатора подвержены угловому расхождению. Как показано на фиг. 1А, при воздействии магнитного поля смещения, первые концы 151a-151d расходятся под углом друг относительно друга на одном конце этажерочной структуры из элементов, при этом вторые концы 152a-152d расходятся под углом друг относительно друга на втором конце этажерочной структуры из элементов.
При работе маркер 100 на основе MMR резонирует на своей характеристической частоте при опросе (с использованием, например, портативного локатора), при этом переменное магнитное поле настраивается на эту частоту. Во время этого периода опроса энергия накапливается в маркере как в виде магнитной, так и в виде механической энергии (проявляется в виде вибраций резонатора). После отключения поля опроса резонатор продолжает вибрировать и высвобождает значительную переменную магнитомеханическую энергию на своей резонансной частоте, которая может удаленно детектироваться с помощью подходящего детектора, который может быть включен в тот же портативный локатор. Таким образом, маркер 100 на основе MMR может быть обнаружен посредством его возбуждения внешним переменным магнитным полем, если энергия хранится в маркере, и последующего детектирования магнитного поля, генерируемого маркером на основе MMR, поскольку он рассеивает свою сохраненную энергию экспоненциально на своей собственной резонансной частоте. Такой ответный сигнал предупреждает поискового технического работника о присутствии маркера 100 на основе MMR.
Длина (апертура) антенны MMR и коэффициент усиления (или добротность резонанса), наряду с мощностью передачи локатора и приемником, непосредственно влияют на максимальный диапазон детектирования. Как и предполагалось, чем мощнее принимаемый сигнал, тем большим будет диапазон детектирования. Тем не менее, как наблюдалось исследователями, характеристики стандартных MMR слишком чувствительны к условиям окружающей среды. Таким образом, если резонирующие ленты/полоски смещаются вследствие силы тяжести, то может быть замечено несколько эффектов. Во-первых, добротность резонанса и коэффициент усиления могут в значительной степени варьироваться вследствие изменения трения и усилий между самими лентами/полосками. Во-вторых, резонансная частота может смещаться вследствие пространственного разнесения ленты с магнитом смещения (для стандартных конструкций MMR), изменяясь наряду с изменением усилий внутреннего напряжение вследствие изгибания. Если сдвиг частоты становится значительным вследствие таких эффектов окружающей среды, то ответный сигнал MMR будет ослабляться шумовым фильтром приемника локатора, что повлечет за собой уменьшение расстояния детектирования. Если полоса пропускания приемника локатора расширена для борьбы со значительным сдвигом резонансной частоты маркера на основе MMR, минимальный уровень шума также увеличивается, что может стать причиной уменьшенного отношения сигнала к шуму (SNR), тем самым уменьшая расстояние детектирования. Другие стандартные способы, включающие качание частоты в узкой полосе пропускания в локаторе с целью обеспечения покрытия сдвига частоты в MMR, также имеют более высокую эффективную полосу пропускания и страдают от пониженного SNR.
Другой аспект, связанный с локаторными системами, заключается в том, что время реакции системы ограничено эффективностью рабочего персонала, что ограничивает минимальную полосу пропускания приемника локатора. При использовании техническим работником ручного локатора для нахождения закопанных маркеров для эффективности работы предпочтительно располагать быстрой реакцией системы.
Дополнительный аспект заключается в том, что максимальная передаваемая мощность может быть ограничена органами радиочастотного надзора, наряду с весом и размером батареи.
Таким образом, маркер с высоким коэффициентом усиления на основе MMR, стабильный по частоте и коэффициенту усиления при стандартных условиях окружающей среды, является предпочтительным для максимизации расстояния детектирования в наиболее неблагоприятном варианте закопанного маркера или кластера из маркеров независимо от выходной мощности локатора.
При использовании для усиления отклика множества маркеров на основе MMR более высокий коэффициент усиления достигается посредством высокостабильных маркеров, а также конфигураций MMR, которые варьируются предсказуемым образом, при этом сигналы всех MMR в кластере смещаются в сущности на одинаковую величину и продолжают складываться в зависимости от количества маркеров в кластере, вместо того, чтобы, в худшем случае, вычитаться друг из друга вследствие изменения фазы.
Для целей детектирования предпочтительно иметь такую конструкцию, как предложенная в описанных в настоящем документе воплощениях, для того, чтобы обеспечить более высокую стабильность и предсказуемость и, таким образом, более высокочувствительный маркер.
Имеется несколько связанных с работой характеристик, таких как частота, сигнал и Q, которые могут быть оптимизированы в рамках локаторной системы с маркером на основе MMR, при этом каждая из них обладает своими собственными преимуществами, в зависимости от специфического критерия применения и детектирования. Во многих применениях ориентация и вращение маркера на основе MMR не могут контролироваться. Магнитное поле Земли добавляется к нолю смещения ленты как вектор, тем самым увеличивая или уменьшая его на величину до +/- 0,6 Э. Это обеспечивает меньший сдвиг частоты при использовании этажерочной структуры резонатора более высокого порядка. Как наблюдается, сила притяжения Земли, действующая на подвешенную ленту, более эффективно действует на длинные ленты, необходимые для некоторых частотных диапазонов. Таким образом, предпочтительным является конструирование и конфигурирование маркера на основе MMR, как описано в настоящем документе, для получения стабильных характеристик во всех ориентациях.
В одном аспекте изобретения маркер 100 на основе MMR может также содержать дополнительные ограничители 170а и 170b перемещения, расположенные, соответственно, между центральной областью 153 и соответствующими концами 151 и 152 этажерочной структуры 150 из элементов. В одном аспекте дополнительные ограничители 170а, 170b перемещения могут быть расположены вдоль этажерочной структуры 150 резонатора на расстоянии приблизительно 1/3 расстояния между центральной областью 153 и каждым соответствующим концом 151, 152. Альтернативно, в другом аспекте дополнительные ограничители 170а, 170b перемещения могут быть расположены ближе к концам 151, 152 этажерочной структуры резонатора. Каждый из ограничителей 170а, 170b перемещения ограничивает величину углового расхождения этажерочной структуры резонатора. Фактически, ограничители 170а, 170b перемещения могут быть выполнены такого размера, который обеспечивает некоторое разделение между элементами, то есть чтобы ленты/полоски 150a-150d не могли контактировать друг с другом. Дополнительные ограничители перемещения способствуют уменьшению сгибания лент/полосок большей длины (и этажерочных структур высокого порядка) вследствие земного притяжения. Ограничители 170а, 170b перемещения могут быть выполнены из жесткого пластмассового материала и выполняют функцию уменьшения изменений частоты сигнала при изменении ориентации MMR (относительно поверхности земли).
В одном из альтернативных аспектов настоящего изобретения этажерочная структура 150 резонатора может содержать полоски резонатора, имеющие изогнутость вдоль длинной оси (эффект обработки, возникающий вследствие охлаждения на холодном вале), причем полоски резонатора из первого набора ориентированы "отогнутыми вверх" а полоски резонатора из второго набора ориентированы "отогнутыми вниз". Полоски резонатора могут быть уложены в этажерочную структуру так, чтобы половина лент была отогнута вниз, а половина лент была отогнута вниз, при этом соседние отогнутые элементы направлены друг от друга с обеспечением чередования. Такое расположение может обеспечивать дополнительную стабильность частоты в любой ориентации, при которой этажерочная структура резонатора будет характеризоваться общей симметрией при вращениях вверх и вниз. При такой ориентации ленты, расположенные ближе всего к верхней и нижней крышкам, могут быть использованы для ограничения подвижности всей этажерочной структуры из лент вследствие действия силы тяжести (может происходить небольшое касание).
В другом аспекте маркер 100 на основе MMR может дополнительно содержать основу 115 для расположения на ней других компонентов маркера на основе MMR, таких как концевые магниты 140а, 140b смещения и центральный зажимной элемент 160. Таким образом, основа 115 может обеспечивать дистанцирование магнитов 140а, 140b смещения от концов 151, 152 расположенных в виде этажерочной структуры элементов. Основа 115 может быть выполнена из гибкого пластмассового материала, при этом маркер на основе MMR может гнуться (например, при прикреплении к гибкой трубе).
На фиг. 1С показан другой аспект настоящего изобретения - маркер 100' на основе MMR. Маркер 100' на основе MMR содержит множество ферромагнитных элементов 150, причем в этом воплощении ферромагнитные элементы содержат шесть полосок 150a-150f резонатора, расположенные в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец 151 и второй продольный конец 152. Другие компоненты маркера 100 на основе MMR' могут быть такими же, как и компоненты, описанные применительно к фиг. 1А.
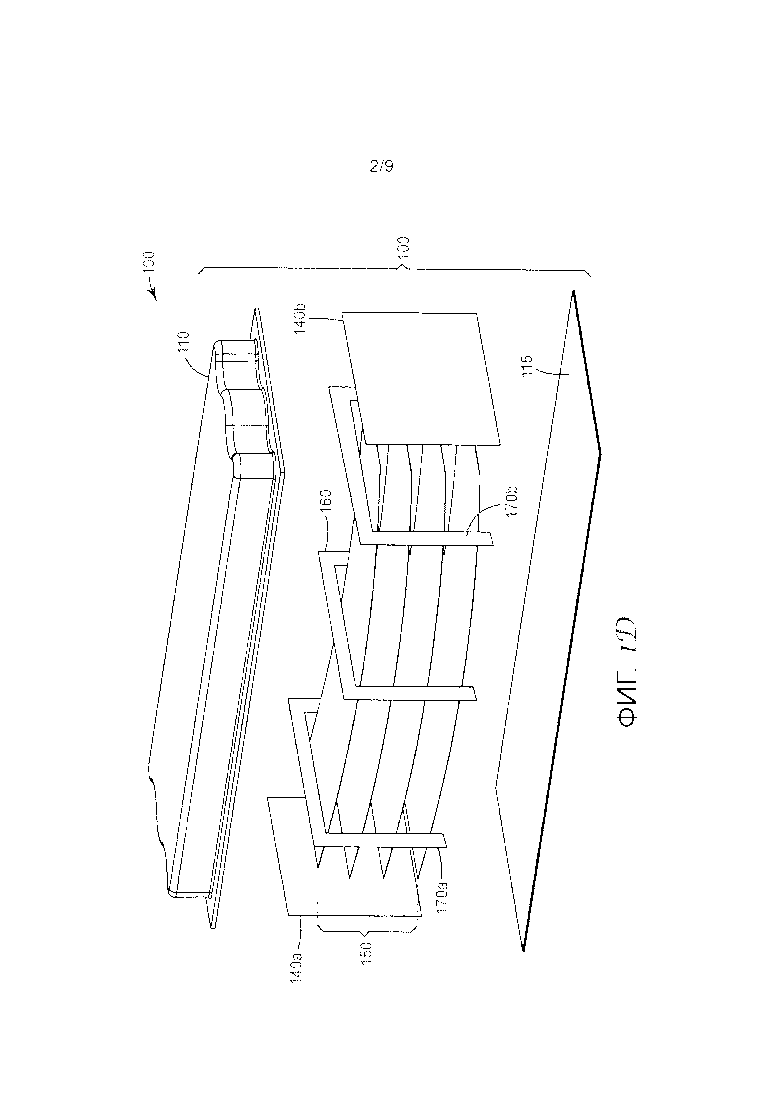
Как показано на покомпонентном виде фиг. 1D, маркер 100 на основе MMR (или маркер 100' на основе MMR) может дополнительно содержать корпус или крышку 110. Корпус или крышка 110 выполнены с возможностью закрывания вышеупомянутых компонентов MMR. Корпус 110 и основа 115 могут быть выполнены из пластмассы или любого другого непроводящего материала, такого как ПВХ или другие полимеры. В одном аспекте корпус может быть выполнен с использованием стандартного процесса вакуумного формования. В предпочтительном аспекте материал корпуса может сохранять свою форму и пространственное разнесение вокруг полоски резонатора и материала смещения. Кроме того, корпус и материал компонента могут быть выполнены в виде нежесткой гибкой конструкции (например, в виде гофрированной конструкции) или за счет состава материала, или за счет толщины стенок корпуса. Также корпус может иметь низкий профиль. Например, гофрированный корпус может обеспечивать более высокую прочность, чем плоский корпус, и может гнуться, что делает продукт подходящим для непосредственного закапывания, а также использования применительно к пластиковым трубам.
В альтернативном аспекте настоящего изобретения маркер 100, 100' на основе MMR может быть расположен внутри защитной капсулы или внешнего корпуса, выполненных с возможностью выдерживания жестких условий. Защитная капсула может быть выполнена из надежного материала, такого как полиэтилен высокой плотности (HDPE).
Маркер 100, 100' на основе MMR может быть расположен на подземном объекте, таком как трубопровод, труба или другое устройство, или вблизи него. Например, маркер 100, 100' на основе MMR может представлять собой отдельный маркер, он может физически крепиться к подземному объекту, такому как трубопровод или другие коммуникации, или он может крепиться к другому устройству, такому как предупредительная или сигнальная лента, расположенному на подземном объекте или вблизи него. Кроме того, маркеры на основе MMR, описанные в настоящем документе, могут быть использованы в окружающих условиях, отличающихся от подземных, например, они могут быть использованы при обнаружении и идентификации надземных объектов, иным образом спрятанных от обзора (например, в контейнере или внутри строительной стены, потолка или пола).
Кроме того, маркеры на основе MMR могут быть специально выполнены с возможностью работы на различных частотах, ассоциированных с уникальными типами объектов, такими как различные инженерные объекты (например, объекты, связанные с водой, сточными водами, электричеством, телефоном/кабельным телевидением/передачей данных и газом). Например, в одном аспекте маркер на основе MMR характеризуется частотным диапазоном от приблизительно 34 кГц до приблизительно 80 кГц. Следует отметить, что в некоторых применениях, например, в случае обнаружения пластмассовых труб, сдвиги частоты не являются предпочтительными, поскольку множество маркеров на основе MMR могут быть скомбинированы для получения дополнительной глубины детектирования. Соответственно, маркеры на основе MMR, раскрытые в настоящем документе, могут быть объединены в кластеры (для обеспечения дополнительной глубины детектирования), поскольку маркеры будут значительно улучшать сигнал когерентным образом благодаря стабильности частоты без проявления значительной расстройки и сдвига частоты. Кроме того, особенно в применениях, связанных с поиском труб, маркеры на основе MMR могут быть использованы для обеспечения не только местоположения объекта, а также направленности объекта.
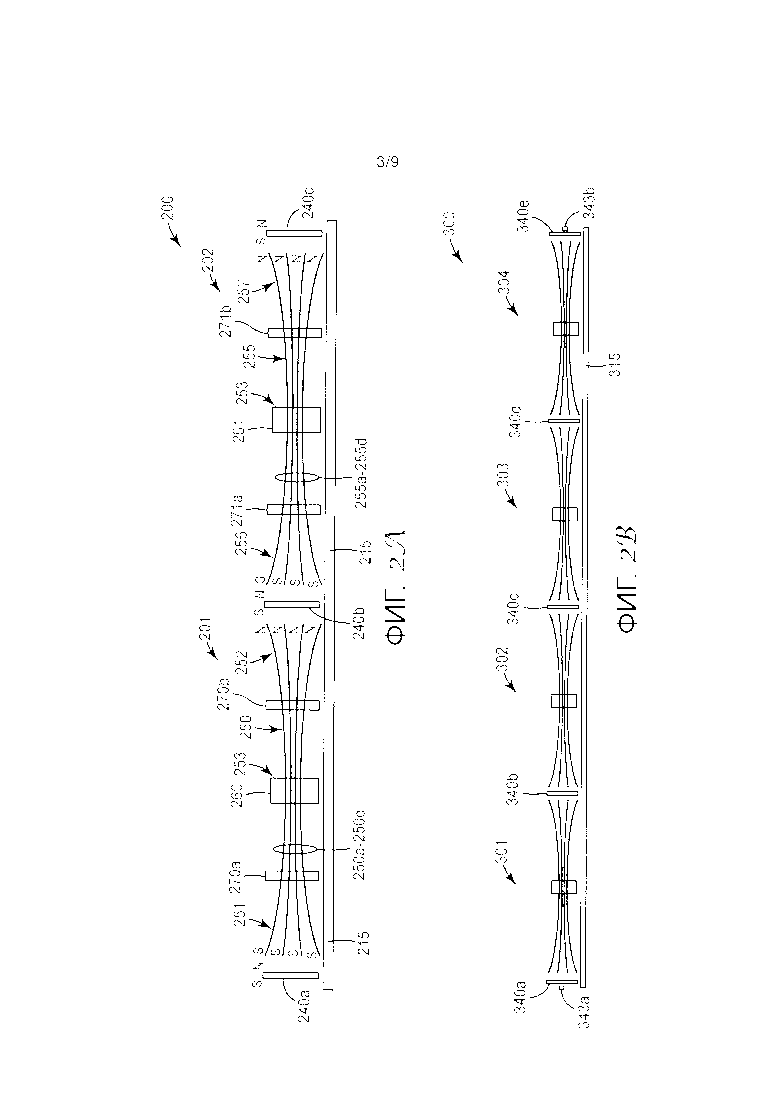
В другом аспекте настоящего изобретения на фиг. 2А показан маркер на основе MMR 200, сформированный в виде кластера из маркеров 201 и 202 на основе MMR. В этой кластерной конструкции маркеры 201, 202 на основе MMR имеют общий концевой магнитный элемент 240b смещения. Опционально, маркеры 201, 202 на основе MMR могут также иметь общую основу 215. Как будет очевидно среднему специалисту в данной области, с учетом настоящего описания, также может быть использована альтернативная кластерная конструкция, имеющая три, четыре, пять или более маркеров, каждый из которых имеет по меньшей мере один концевой магнит смещения, общий с другим маркером на основе MMR. Эта кластерная конструкция может обеспечивать более мощный сигнал (приблизительно пропорционально количеству маркеров в кластере), в то же время используя общие концевые магниты.
В частности, первый маркер 201 на основе MMR содержит множество ферромагнитных элементов 250. В этом аспекте ферромагнитные элементы содержат четыре полоски 250a-250d резонатора, расположенные в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец 251 и второй продольный конец 252. Хотя четыре полоски резонатора показаны входящими в состав элемента 250 в виде этажерочной структуры, множество ферромагнитных элементов может составлять этажерочную структуру из 2, 3, 4, 5, 6, 7, 8 или более полосок резонатора, в зависимости от условий. Полоски 250a-250d резонатора могут быть уложены непосредственно друг поверх друга или, альтернативно, одна или более проставок, таких как клеевые точки (не показаны), могут быть расположены между полосками резонатора в центральной продольной области 253 этажерочной структуры 250, вследствие чего указанные полоски не контактируют непосредственно друг с другом в области 253.
Аналогично, второй маркер 202 на основе MMR содержит множество ферромагнитных элементов 255. В этом аспекте ферромагнитные элементы содержат четыре полоски 255a-255d резонатора, расположенные в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец 256 и второй продольный конец 257. Хотя четыре полоски резонатора показаны входящими в состав элемента 255 в виде этажерочной структуры, множество ферромагнитных элементов может составлять этажерочную структуру из 2, 3, 4, 5, 6, 7, 8 или более полосок резонатора, в зависимости от условий. Полоски 255a-255d резонатора могут быть уложены непосредственно друг поверх друга или, альтернативно, одна или более проставок, таких как клеевые точки (не показаны), могут быть расположены между полосками резонатора в центральной продольной области 258 этажерочной структуры 255, вследствие чего указанные полоски не контактируют друг с другом непосредственно в области 258.
Каждая из полосок 250a-250d и 255а-255d резонатора может содержать ферромагнитный материал с магнитострикционными свойствами, такой как материалы, описанные выше.
Каждый из маркеров 201 и 202 на основе MMR содержит магнитные элементы смещения, расположенные на каждом конце этажерочной структуры из элементов резонатора. Как показано на фиг. 2А, первый магнитный элемент смещения, такой как магнит 240а смещения, расположен вблизи конца 251 первой этажерочной структуры 250 из элементов резонатора, при этом второй магнитный элемент смещения, такой как магнит 240b смещения, расположен вблизи конца 252 этажерочной структуры 250 из элементов резонатора. Такая ориентация магнитного смещения может способствовать уменьшению воздействия силы тяжести на этажерочную структуру из элементов (например, если магнит смещения расположен сверху одного или более ферромагнитных элементов, сила тяжести будет оттягивать элемент (элементы) от магнита смещения).
Как упоминалось ранее, в такой кластерной конфигурации, концевой магнит 240b смещения совместно используется маркером 201 на основе MMR и маркером 202 на основе MMR. Магнит 240b смещения расположен вблизи конца 256 второй этажерочной структуры 255 из элементов резонатора, при этом другой магнитный элемент смещения, такой как магнит 240 с смещения, расположен вблизи конца 257 этажерочной структуры 255 из элементов резонатора.
Каждый из магнитных элементов 240а, 240b, 240с смещения может содержать постоянный магнит или магнитно-жесткую, или магнитно-полужесткую металлическую полоску, такие как материалы, описанные выше. В другом аспекте один или более маркеров 201 и 202 на основе MMR могут содержать концентраторы ноля, расположенные между магнитными элементами смещения и каждым из концов этажерочной структуры из элементов резонатора. Концентраторы поля помогают собирать и направлять магнитное поле от магнитных элементов смещения к концам этажерочной структуры из элементов резонатора.
Кроме того, каждый из маркеров 201 и 202 на основе MMR может содержать зажимной элемент, такой как зажимной элемент 260, расположенный в центральной продольной области 253 этажерочной структуры 250 из элементов резонатора, и зажимной элемент 261, расположенный в центральной продольной области 258 этажерочной структуры 255 из элементов резонатора. Зажимные элементы ограничивают перемещение ферромагнитных элементов 250a-250d, 255a-255d относительно друг друга. Зажимные элементы 260, 261 могут содержать такие же материалы и конструкции, как и описанные выше применительно к зажимным элементам 160 и 161. Кроме того, один или оба зажимных элементов 260, 261 могут содержать амортизирующий элемент для способствования уменьшению перемещения этажерочной структуры из элементов резонатора при воздействии на MMR значительных вибраций во время транспортировки и установки. В еще одном альтернативном аспекте комбинация клеевых точек или механического зажима с набором зажимов с постоянными магнитами может обеспечивать краткосрочную устойчивость при тряске, падении и т.п., в то же время обеспечивая постоянное удерживание с помощью постоянных магнитов.
Аналогично, при воздействии внешнего магнитного поля на определенной частоте полоски резонатора взаимодействуют с магнитным полем и преобразовывают магнитную энергию в механическую энергию в виде магнитомеханический осцилляций полосок резонатора. Как показано на фиг. 2, поскольку центральные части этажерочных структур 250, 255 зафиксированы от перемещения посредством зажимных элементов 260, 261, первый и второй концы каждого элемента 250a-250d, 255a-255d резонатора подвержены угловому расхождению. Как показано на фиг. 2А, при воздействии магнитного поля смещения, первые концы этажерочных структур 250, 255 резонатора расходятся под углом друг относительно друга на одном конце соответствующих этажерочных структур из элементов, при этом вторые концы расходятся под углом друг относительно друга на соответствующих вторых концах этажерочных структур из элементов.
Каждый из маркеров 201, 202 на основе MMR может дополнительно содержать дополнительные ограничители перемещения, такие как описанные выше применительно к фиг. 1А. Например, в случае маркера 201 на основе MMR дополнительный ограничитель 270а перемещения может быть расположен между первым концом 251 и центральной областью 253, при этом второй ограничитель 270b перемещения может быть расположен между вторым концом 252 и центральной областью 253 этажерочной структуры 250 из элементов. Аналогично, ограничитель 271а перемещения может быть расположен между первым концом 256 и центральной областью 258, при этом второй ограничитель 271b перемещения может быть расположен между вторым концом 257 и центральной областью 258 этажерочной структуры 255 из элементов. Позиционирование ограничителя перемещения вдоль этажерочной структуры из элементов резонатора может быть аналогичным позиционированию, описанному выше применительно к маркеру 100 на основе MMR. Ограничители перемещения могут быть сконструированы аналогично тому, как описано выше.
Как упоминалось выше, в одном аспекте маркеры 201, 202 на основе MMR могут иметь общую основу 215 для расположения других компонентов маркеров на основе MMR. В одном альтернативном аспекте каждый маркер 201, 202 на основе MMR может иметь отдельную основу. Основа 215 может быть выполнена из гибкого пластмассового материала, при этом кластерный маркер 200 на основе MMR может гнуться (например, при прикреплении к гибкой трубе).
Кроме того, кластерный маркер 200 на основе MMR может дополнительно содержать корпус или крышку, выполненные с возможностью закрывания маркеров 201, 202 на основе MMR. Корпус может быть сконструирован аналогично корпусу 110, описанному выше. В альтернативном аспекте настоящего изобретения кластерный маркер 200 на основе MMR может быть расположен внутри защитной капсулы или внешнего корпуса, выполненных с возможностью выдерживания жестких условий. Защитная капсула может быть выполнена из надежного материала, такого как полиэтилен высокой плотности (HDPE).
В другом аспекте настоящего изобретения на фиг. 2А показан маркер 300 на основе MMR, сформированный в виде кластера из маркеров 301, 302, 303 и 304 на основе MMR. В этой кластерной конструкции маркеры 301, 302, 303 и 304 на основе MMR имеют по меньшей мере один общий концевой магнитный элемент смещения. Опционально, маркеры 301, 302, 303 и 304 на основе MMR могут также иметь общую основу 315. Основа 315 может быть выполнена из гибкого пластмассового материала, при этом кластерный маркер 200 на основе MMR может гнуться (например, при прикреплении к гибкой трубе). Как упоминалось выше, такой тип кластерной конструкции может обеспечивать более мощный сигнал (приблизительно пропорционально количеству маркеров в кластере), в то же время используя общие концевые магниты.
В частности, каждый из маркеров 301, 302, 303 и 304 на основе MMR содержит множество ферромагнитных элементов, таких как описанные выше. В этом аспекте каждая этажерочная структура из ферромагнитных элементов содержит четыре полоски резонатора из ферромагнитного материала с магнитострикциониыми свойствами, такого как материалы, описанные выше. Хотя четыре полоски резонатора показаны входящими в состав каждой этажерочной структуры из ферромагнитных элементов, множество ферромагнитных элементов может составлять этажерочную структуру из 2, 3, 4, 5, 6, 7, 8 или более полосок резонатора, в зависимости от условий. Как и в аспектах изобретения, описанных выше, полоски резонатора могут быть уложены непосредственно друг поверх друга или, альтернативно, одна или более проставок, таких как клеевые точки (не показаны), могут быть расположены между полосками резонатора в центральной продольной области каждой этажерочной структуры, вследствие чего указанные полоски не контактируют непосредственно друг с другом в центральной области.
Каждый из маркеров 301, 302, 303 и 304 на основе MMR содержит магнитные элементы смещения, расположенные на каждом конце этажерочной структуры из элементов резонатора. Как показано на фиг. 2В, магнитные элементы 340а, 340b, 340с, 340d и 340е смещения расположены на концах этажерочных структур из лент, аналогично тому, как описано выше. Кроме того, маркер 300 на основе MMR дополнительно содержит первый проницаемый материал 343а смещения, расположенный вблизи магнита 340а смещения, и второй проницаемый материал 343b смещения, расположенный вблизи магнита 340е смещения. Проницаемые материалы смещения могут содержать, например, ферритовый материал. Проницаемый материал смещения может быть выполнен очень малого размера, например, он может быть выполнен в виде цилиндрической крупицы диаметром менее 0,2 дюйма и длиной менее 0,2 дюйма.
В случае более длинных кластеров может существовать небольшая расстройка частоты, даже если все отдельные ленты и магниты смещения одинаковые, вследствие переменного магнитного сопротивления пути, обусловленного самими этажерочными структурами из лент, вследствие чего средняя этажерочная структура из лент может характеризоваться отличающимся смещением, по сравнению с этажерочными структурами из лент, расположенными на концах кластера. Как наблюдается, расстройка частоты среди этажерочных структур в кластере на основе MMR может зависеть от факторов, таких как количество этажерочных структур, номинальное пространственное разнесение между магнитами смещения и этажерочными структурами из лент, а также аморфное поведение материала лент.
В этой конфигурации дополнительные проницаемые материалы смещения могут быть использованы для усиления магнитного поля в концевых этажерочных структурах для соответствия общему смещению, действующему на расположенные в середине этажерочные структуры из лент (например, этажерочные структуры из MMR 302 и MMR 303). Когда все смещения одинаково согласованы, все этажерочные структуры из лент кластера на основе MMR резонируют на одинаковой частоте, обеспечивая еще более мощный выходной сигнал.
В альтернативном аспекте вместо добавления проницаемых материалов смещения концевые магниты смещения (например, магниты 340а и 340е смещения согласно фиг. 2В) могут быть расположены ближе к концам этажерочной структуры резонатора для увеличения смещения.
Каждый из магнитных элементов 340а-340е смещения может содержать постоянный магнит или магнитно-жесткую, или магнитно-полужесткую металлическую полоску, такие как материалы, описанные выше. В другом аспекте один или более маркеров 301-304 на основе MMR могут содержать концентраторы ноля, расположенные между магнитными элементами смещения и каждым из концов этажерочной структуры из элементов резонатора. Концентраторы поля помогают собирать и направлять магнитное поле от магнитных элементов смещения к концам этажерочной структуры из элементов резонатора.
Кроме того, каждый из маркеров 301-304 на основе MMR может содержать зажимной элемент и/или ограничители перемещения, такие как описанные выше.
Как и в случае устройств на основе MMR описанных выше, при воздействии внешнего магнитного поля на определенной частоте полоски резонатора MMR 300 взаимодействуют с магнитным полем и преобразовывают магнитную энергию в механическую энергию в виде магнитомеханических осцилляций полосок резонатора
Кроме того, кластерный маркер 300 на основе MMR может дополнительно содержать корпус или крышку, выполненные с возможностью закрывания маркеров 301, 304 на основе MMR. Корпус может быть сконструирован аналогично корпусам, описанным выше. В альтернативном аспекте настоящего изобретения кластерный маркер 300 на основе MMR может быть расположен внутри защитной капсулы или внешнего корпуса, выполненных с возможностью выдерживания жестких условий. Защитная капсула может быть выполнена из надежного материала, такого как полиэтилен высокой плотности (HDPE).
Кластерные маркеры 200, 300 на основе MMR могут быть расположены на подземном объекте, таком как трубопровод, труба или другое устройство, или вблизи него. Например, маркер 200 на основе MMR может представлять собой отдельный маркер, он может физически крепиться к подземному объекту, такому как трубопровод или другие коммуникации, или он может крепиться к другому устройству, такому как предупредительная или сигнальная лента, расположенному на подземном объекте или вблизи него. Кроме того, маркеры на основе MMR, описанные в настоящем документе, могут быть использованы в окружающих условиях, отличающихся от подземных, например, они могут быть использованы при обнаружении и идентификации надземных объектов, иным образом спрятанных от обзора (например, в контейнере или внутри строительной стены, потолка или пола).
Как было описано выше, кластерные маркеры на основе MMR, такие как кластерные маркеры 200 и 300 на основе MMR могут быть специально выполнены с возможностью работы на различных частотах, ассоциированных с уникальными типами объектов, такими как различные инженерные объекты (например, объекты, связанные с водой, сточными водами, электричеством, телефоном/кабельным телевидением/передачей данных и газом).
Портативное устройство обнаружения может применяться для детектирования маркеров на основе MMR, описанных в настоящем документе. Один из примеров портативного устройства обнаружения описан в документе US 2012/068823, включенном в настоящее описание посредством ссылки во всей полноте. Такое устройство обнаружения может содержать одну антенну, которая используется для генерирования электромагнитного поля, а также для детектирования отклика маркера 100, 100', 200, 300 на основе MMR. В одном из альтернативных аспектов портативное устройство обнаружения может содержать множество антенн, при этом одна антенна может использоваться для генерирования электромагнитного поля, а вторая антенна может использоваться для детектирования отклика маркера на основе MMR на сгенерированное поле. Для более высокой мобильности устройство обнаружения может питаться от батареи. Интегрированный дисплей может обеспечивать пользователя множеством информации об обнаруженных маркерах на основе MMR и объектах, с которыми связаны маркеры на основе MMR. Например, дисплей может обеспечивать информацию о глубине расположения маркера и объекта, направлении или другой информации о маркерах на основе MMR. Примеры портативных устройств обнаружения включают 3М™ Dynatel™ 1420 Locator и 3М™ Dynatel™ 7420 Locator, оба распространяемые компанией 3М Company, St. Paul, Minn. В одном воплощении прошивка устройства обнаружения может быть запрограммирована так, чтобы обеспечивалась настройка антенны локатора на излучение конкретной или нескольких конкретных требуемых частот.
В альтернативных аспектах маркеры на основе MMR, описанные в настоящем документе, могут использоваться в качестве детали системы индикации стерилизации, обеспечивающей время, температуру и/или химическую информацию. В дополнительном альтернативном аспекте маркеры на основе MMR, описанные в настоящем документе, могут быть использованы в качестве детали системы индикации скоропортящихся (например, испорченных продуктов), обеспечивающей информацию о времени и температуре. В дополнительном альтернативном аспекте маркеры на основе MMR, описанные в настоящем документе, могут быть использованы в качестве детали системы обнаружения утечки, обеспечивающей информацию об утечке для надземных или подземных коммуникаций. Альтернативно, маркеры на основе MMR, описанные в настоящем документе, могут быть выполнены таким образом, чтобы они были подвержены влиянию изменяющихся условий, поскольку ответный сигнал может варьироваться с течением времени или в зависимости от условий, тем самым предоставляя пользователю определенную информацию.
Эксперименты
Были проведены эксперименты, в ходе которых были проведены сравнения различных характеристик маркеров на основе MMR, выполненных в соответствии с конфигурациями, рассмотренными выше (например, где "кластерные" MMR, рассматриваемые ниже, имеют конструкцию, такую как показанная на фиг. 2), а также сравнения вышеприведенных конфигураций MMR с MMR, характеризующимися стандартной конфигурацией с нижними магнитами смещения, такими как описанные в документе US 2012/068823.
Если не указано иное, материалы резонатора были подобраны для работы на частоте или приблизительно 35 кГц, или 55 кГц и поставлялись компанией Metglas, Inc., Conway, S.C. Размеры полоски резонатора показаны относительно каждого соответствующего эксперимента.
Для того, чтобы оценить стабильность частоты и усиления примеров маркеров на основе MMR относительно силы притяжения и магнитного поля Земли, каждый маркер или кластер из маркеров помещают внутри тестового устройства, в котором образцы ориентированы горизонтально и вращаются вокруг их длинной оси с принятием трех основных положений: вращение вверх, вниз и в сторону, при этом внешнее магнитное поле изменяют для симулирования магнитного поля Земли вдоль длины ленты до значения по меньшей мере +/- 0,6 Э. Магнитное поле Земли добавляется или вычитается из поля смещения в зависимости от ориентации, а также от положения поверхности Земли. Компонента вектора магнитного поля Земли вдоль длины ленты оказывает наибольшее влияние на общее смещение ленты/полоски, независимо от расположения магнита смещения относительно лент/полосок.
На каждой ступени магнитного поля и угловом положении маркеры на основе MMR возбуждаются импульсом из 220 циклов на резонансной частоте с частотой повторения приблизительно 30 Гц (или период 33 мс). В ходе проведения испытания возбуждение генерируется внешней катушкой с центральной ферритовой антенной длиной 8 дюймов, установленной в стороне на расстоянии 7 дюймов от MMR.
В ходе проведения испытания антенна приемника длиной 8 дюймов установлена с другой стороны MMR на расстоянии приблизительно 7 дюймов. Для сэмплирования сигнала от MMR используется система получения данных на протяжении 40 циклов резонансной частоты непосредственно после импульса передачи. В этих экспериментах полученный сигнал фильтруется и усредняется для уменьшения влияния шума, затем записывается в относительном масштабе, например, в дБ. Этот масштаб подходит для детектирования закопанных электронных маркеров, поскольку сигнал изменяется в зависимости от расстояния в минус шестой степени (расстояние в минус третьей степени в каждом направлении, т.е. путь туда и обратно обеспечивает расстояние в минус шестой степени). Сигнал магнитного поля переменного тока, эквивалентный приблизительно 0,1 мЭ или менее, используется для симулирования поля возбуждения на расстоянии 3-4 фута от локатора.
Резонансная частота MMR, добротность Q резонанса и коэффициент усиления измеряются при различных угловых положениях маркера или кластера: вверх, вниз, в сторону, при этом внешнее поле изменяют для симулирования магнитного поля Земли.
Эксперимент 1
На фиг. 3 показано сравнение (зависимость резонансной частоты (Гц) от смещения магнитного поля (Э)) экспериментального кластера на основе MMR (Образец MMR 1) с кластером из двух стандартных (с нижним смещением) MMR. Образен MMR 1 содержит конфигурацию с 2 этажерочными структурами резонатора, подобную конфигурации MMR 200, описанной выше, за исключением того, что каждая этажерочная структура резонатора содержит 6 полосок резонатора, каждая из которых имеет размеры 40 мм (длина) × 12 мм (ширина) (ленты Metglas MG2826MB3). Концевые магниты смещения представляли собой сверхмощные неодимовые магниты KJ Magnetics в форме блоков (толщина 1/16'', высота 1/8'', ширина 1/4''), при этом один магнит смещения являлся общим. Центральный зажимной элемент был сформирован с использованием небольших цилиндрических магнитов (диаметр 1/16'' × высота 1/16'') для центральных зажимов. Стандартный кластерный MMR был разработан подобно MMR, описанным в документе US 2012/068823. Ориентации вверх, вниз и в стороны были измерены для конфигурации каждого кластера. MMR настроены на частоту в диапазоне 55 кГц.
Образцы были испытаны, как описано выше (повернуты вверх, вниз и в стороны, при этом обеспечивалось воздействие поля смещения для симуляции магнитного поля Земли, а также возбуждены и измерены посредством передающей и принимающей антенн, каждая из которых находилась на достаточном пространственном разнесении, с тем чтобы не оказывалось влияние на точность измерений).
На фиг. 3 показано, что образец MMR 1 обладает значительно более высокой стабильностью частоты и предсказуемостью по сравнению со стандартным кластерным устройством на основе MMR при его вращении при воздействии различных магнитных полей Земли. При любой заданной величине магнитного поля Земли, если образец подвергается вращению, стандартный кластер на основе MMR проявляет сдвиг резонансной частоты вплоть до четырехкратного вследствие вращения образца, по сравнению с образцом MMR 1.
Следует отметить, что для стандартного образца с нижним смещением, поскольку в кластере присутствует два MMR, частотный график соответствует самой высокочастотной составляющей в развертке сигнала от обоих MMR.
Кроме того, поскольку частота изменяется в зависимости от магнитного ноля Земли более предсказуемо, конфигурация данного примера позволяет использовать MMR, такой как образец MMR 1, в качестве устройства измерения магнитного поля и, таким образом, в качестве более высокочувствительного и более точного датчика. Если резонансная частота сдвигается предсказуемым образом вследствие влияния магнитного поля Земли, резонаторы могут использоваться в качестве компаса, поскольку резонансная частота будет зависеть от окружающего магнитного поля. Это позволяет осуществлять опосредованное измерение окружающего магнитного ноля вдоль длинной оси сенсора. При комбинировании двух или более подобных сенсоров, расположенных перпендикулярно друг к другу, такая конфигурация может использоваться для точного измерения вектора магнитного поля Земли и может использоваться в качестве компаса. И наоборот, стандартные (с нижним смещением) датчики на основе MMR могут характеризоваться более высокой непредсказуемостью в плане сдвига частоты и вариации коэффициента усиления в зависимости от силы тяжести.
Эксперимент 2
На фиг. 4 показано другое сравнение (зависимость усиления сигнала (дБ) от смещения магнитного поля (Э)) экспериментального кластера на основе MMR (Образец MMR 2) с кластером из двух стандартных (с нижним смещением) MMR. Образец MMR 2 содержит конфигурацию, аналогичную образцу MMR 1 - конфигурация с 2 этажерочными структурами резонатора, подобная конфигурации MMR 200, описанной выше, за исключением того, что каждая этажерочная структура резонатора содержит 6 полосок резонатора, каждая из которых имеет размеры 40 мм (длина) × 12 мм (ширина) (ленты Metglas MG2826MB3). Концевые магниты смещения представляли собой сверхмощные неодимовые магниты KJ Magnetics в форме блоков (толщина 1/16'', высота 1/8'', ширина 1/4''), при этом один магнит смещения являлся общим. Центральный зажимной элемент был сформирован с использованием небольших цилиндрических магнитов (диаметр 1/16'' × высота 1/16'') для центральных зажимов. Стандартный кластерный MMR был разработан подобно MMR, описанным применительно к эксперименту 1. Ориентации вверх, вниз и в стороны были измерены для конфигурации каждого кластера. MMR настроены на частоту в диапазоне 55 кГц.
Образцы были испытаны, как описано выше (повернуты вверх, вниз и в стороны, при этом обеспечивалось воздействие поля смещения для симуляции магнитного поля Земли, а также возбуждены и измерены посредством передающей и принимающей антенн, каждая из которых находилась на достаточном пространственном разнесении, с тем чтобы не оказывалось влияние на точность измерений).
На фиг. 4 показано, что образец MMR 2 характеризуется значительно более высоким коэффициентом усиления сетевого кластера и предсказуемостью по сравнению со стандартным кластерным устройством на основе MMR при его вращении при воздействии различных магнитных полей Земли. Поскольку в кластере содержится два маркера на основе MMR, график усиления сигнала соответствует объединенному сигналу от обоих маркеров на основе MMR.
Коэффициент усиления образца MMR 2 намного выше, чем у сравнительного стандартного образца, вплоть до +16 дБ в принимаемом сигнале, что соответствует приблизительно 25-кратному увеличению запасенной энергии. Образец MMR 2 также более стабилен и в этом эксперименте характеризуется изменением лишь приблизительно 1 дБ. Основываясь на этих результатах, предполагается, что маркер, характеризующийся конструкцией образца MMR 2, может быть обнаружен на глубине закапывания приблизительно 48 или более дюймов, что представляет собой улучшение в глубине на 12 дюймов по сравнению с маркером, характеризующимся стандартной конструкцией с нижним смещением.
Эксперимент 3
На фиг. 5А и 5В показаны, соответственно, зависимости резонансной частоты (Гц) и усиления сигнала (дБ) от смещения магнитного поля (Э) для экспериментального кластера на основе MMR (образец MMR 3). В частности, на фиг. 5А и 5В показаны благоприятные эффекты использования дополнительных ограничителей перемещения в конструкции MMR, что дополнительно способствует уменьшению влияния силы тяжести для более длинных лент (следует отметить, что длина ленты обратно пропорциональна резонансной частоте маркера на основе MMR). В этом эксперименте образец MMR 3 содержит конфигурацию с 2 этажерочными структурами резонатора, подобную конфигурации MMR 200, описанной выше, за исключением того, что каждая этажерочная структура резонатора содержит 6 полосок резонатора, каждая из которых имеет размеры 60 мм (длина) × 12 мм (ширина) (ленты Metglas MG2826MB3). Концевые магниты смещения представляли собой сверхмощные магниты KJ Magnetics в форме блоков (толщина 1/16'', высота 1/8'', ширина 1/4''), при этом один магнит смещения являлся общим. Центральный зажимной элемент был сформирован с использованием очень маленьких цилиндрических неодимовых магнитов KJ Magnetics с аксиальной намагниченностью (диаметр 1/16'' × высота 1/16'') для центральных зажимов. Дополнительные ограничители перемещения содержали затяжки, которые ограничивали перемещение внешних лент в этажерочных структурах резонатора при вращении образца вокруг длинной оси.
На фиг. 5А показан уменьшенный общий сдвиг частоты, особенно в заданной точке смещения для конструкции с дополнительными ограничителями перемещения, по сравнению с конструкциями, в которых используются такие же полоски резонатора, но без дополнительных ограничителей перемещения. Также следует понимать, что в случае полосок резонатора длиной 60 мм размещение дополнительных ограничителей перемещения близко к приблизительно 1/3 расстояния между центральным зажимным элементом и концом этажерочной структуры из лент обеспечивает подходящие результаты. На фиг. 5В показано, что использование дополнительных ограничителей перемещения не оказывает значительного влияния на стабильность усиления.
Эксперимент 4
На фиг. 6А и 6В показано сравнение (зависимость резонансной частоты (Гц) от смещения магнитного поля (Э)) экспериментального одного ярлыка на основе MMR (Образец MMR 4 - фиг. 6В) с MMR, характеризующимся стандартной конструкцией с нижним смещением (фиг. 6А), в случае полосок резонатора длиной 60 мм. Образец MMR 4 содержит конфигурацию этажерочной структуры резонатора, подобную конфигурации MMR 100, описанной выше, за исключением того, что этажерочная структура резонатора содержит 8 полосок резонатора, каждая из которых имеет размеры 60 мм (длина) × 12 мм (ширина) (ленты Metglas MG2826MB3). Концевые магниты смещения представляли собой сверхмощные неодимовые магниты KJ Magnetics в форме блоков (толщина 1/16'', высота 1/8'', ширина 1/4''). Центральный зажимной элемент был сформирован с использованием очень маленьких цилиндрических неодимовых магнитов KJ Magnetics с аксиальной намагниченностью (диаметр 1/16'' × высота 1/16'') для центральных зажимов. В стандартных MMR с нижним смещением была использована этажерочная структура резонатора с 2 полосками резонатора (60 мм (длина) × 12 мм (ширина)) и плоский материал Arnokrome™ III в качестве магнита смещения. Полоски были расположена на расстоянии 1,74 мм от магнита смещения с использованием проставки. Ориентации вверх, вниз и в стороны были измерены для каждой конфигурации. MMR настроены на частоту в диапазоне 35 кГц. Проставка была увеличена для максимизации сигнала, принимаемого одним ярлыком в испытательном устройстве, даже когда данная дополнительная толщина не является предпочтительной исходя из перспективы профиля ярлыка. Магнит смещения, проставка, две ленты и крышка образуют этажерочную структуру для стандартной конструкции MMR.
На фиг. 6В показана меньшая вариация частоты для образца MMR 4, чем для сравнительного примера на фиг. 6А, при любом заданном магнитном поле Земли. Небольшой сдвиг частоты вследствие вращения образца MMR 4 близок к равномерному по всему диапазону магнитного поля Земли.
Расстояние детектирования от детектора до маркера на основе MMR увеличивается при более высоких соотношениях сигнала к шуму. Более высокая стабильность частоты для конфигураций MMR с концевым смещением, описанных в настоящем документе, обеспечивает более узкую полосу пропускания системы, что повышает соотношение сигнала к шуму, тем самым обеспечивая более высокий коэффициент усиления системы и большие глубины детектирования.
Эксперимент 5
Фиг. 7А - график усиления принимаемого сигнала, при этом фиг. 7В - график зависимости добротности магнитомеханического резонанса (резонанс Q) от количества полосок резонатора, используемых для каждого резонатора. Пунктирная линия обозначает резонаторы, характеризующиеся конфигурацией с концевым магнитом смещения/центральным зажимом, такой как описанная выше. Сплошная линия обозначает резонаторы, характеризующиеся стандартной конфигурацией с нижним магнитом смещения. В этом эксперименте в обеих конструкциях использовались одинаковые ленты, при этом криволинейность лент не учитывалась. В этом эксперименте ленты укладывались с формированием этажерочной структуры, при этом направление криволинейности (отогнутость вверх или вниз) было одинаковым.
На фиг. 7А показано, что 3 или более полосок резонатора в стандартной конструкции с нижним смещением не обеспечивают усиление сигнала с каждой дополнительной полоской резонатора. Наоборот, маркер, в котором используется конфигурация с концевым смещением, обеспечивает более мощный принимаемый сигнал, в зависимости от количества дополнительных полосок резонатора.
На фиг. 7В показано, что добротность магнитомеханического резонанса повышается в случае маркера, характеризующегося конфигурацией с концевым смещением/центральным зажимом. Эти данные свидетельствуют о более высоком уровне потерь в стандартной конструкции с нижними магнитами смещения.
Таким образом, маркеры на основе MMR, описанные в настоящем документе, могут использоваться во многих применения, связанных с идентификацией и определением местоположения. Например, маркер на основе MMR может представлять собой отдельный маркер, он может физически крепиться к подземному объекту, такому как трубопровод или другие коммуникации, или он может крепиться к другому устройству, такому как предупредительная или сигнальная лента, расположенному на подземном объекте или вблизи него. Кроме того, маркеры на основе MMR, описанные в настоящем документе, могут быть использованы в окружающих условиях, отличающихся от подземных, например, они могут быть использованы при обнаружении и идентификации надземных объектов, иным образом спрятанных от обзора (например, в контейнере или внутри строительной стены, потолка или пола).
Настоящее изобретение сейчас будет описано со ссылками на несколько отдельных воплощений. Вышеприведенное подробное описание было приведено исключительно в целях ясности и понимания настоящего изобретения. Его не следует понимать, как ограничивающее. Для специалистов в данной области будет понятно, что в описанных воплощениях может быть сделано множество изменений без отклонения от сущности изобретения. Таким образом, объем настоящего изобретения не ограничен конкретными подробностями и конструкциями, описанными в настоящем документе, однако он ограничен конструкциями, описанными в формуле изобретения, а также эквивалентами этих конструкций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Резонаторные маркеры эллиптической формы с повышенными стабильностью частоты и коэффициентом усиления | 2016 |
|
RU2704624C1 |
| Магнитоупругие резонаторные маркеры в формате ленты | 2016 |
|
RU2689118C1 |
| МАРКЕР ДЛЯ ИСПОЛЬЗОВАНИЯ В МАГНИТОМЕХАНИЧЕСКОЙ СИСТЕМЕ ЭЛЕКТРОННОГО КОНТРОЛЯ ТОВАРОВ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА ДЛЯ ЕГО ИСПОЛЬЗОВАНИЯ | 1995 |
|
RU2126553C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ОТЖИГА МЕТАЛЛИЧЕСКИХ ЛЕНТ | 2003 |
|
RU2316610C2 |
| ДАТЧИК ДАВЛЕНИЯ ДЛЯ ВВЕДЕНИЯ В СИСТЕМУ КРОВООБРАЩЕНИЯ ЧЕЛОВЕКА | 2019 |
|
RU2806618C2 |
| УПРАВЛЯЕМЫЙ ФИЛЬТР МАГНИТОСТАТИЧЕСКИХ ВОЛН | 2023 |
|
RU2815062C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КУСКА ПЛЕНКИ МАГНИТОУПРУГОГО МАТЕРИАЛА С ПОВЫШЕННОЙ ИЗГИБНОЙ ЖЕСТКОСТЬЮ, ПРОДУКТ, ИЗГОТОВЛЕННЫЙ ЭТИМ СПОСОБОМ, И СЕНСОР | 2006 |
|
RU2402759C2 |
| ДЕАКТИВАТОР ЭЛЕКТРОМАГНИТНЫХ МЕТОК | 2007 |
|
RU2332713C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2006 |
|
RU2316078C1 |
| ПЕРЕСТРАИВАЕМЫЙ МЕТАМАТЕРИАЛЬНЫЙ ФИЛЬТР ТЕРАГЕРЦЕВОГО ДИАПАЗОНА | 2011 |
|
RU2469446C1 |
Изобретение относится к области измерительной техники и может быть использовано для точной идентификации закопанного объекта и его месторасположения. Магнитомеханическое резонаторное устройство содержит множество ферромагнитных элементов, расположенных в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец и второй продольный конец. Первый магнитный элемент смещения расположен вблизи первого продольного конца этажерочной структуры, при этом второй магнитный элемент смещения расположен вблизи второго продольного конца этажерочной структуры. Зажимной элемент расположен в центральной продольной области этажерочной структуры для ограничения вертикального перемещения множества ферромагнитных элементов относительно друг друга в центральной продольной области, при этом первый и второй концы выполнены с возможностью углового расхождения. Технический результат – расширение диапазона детектирования и повышение стабильности работы системы. 3 н. и 17 з.п. ф-лы, 7 ил.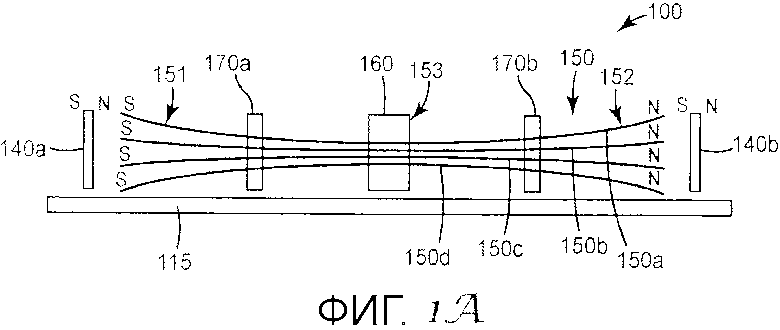
1. Магнитомеханическое резонаторное устройство, содержащее:
множество ферромагнитных элементов, расположенных в конфигурации этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец и второй продольный конец;
первый магнитный элемент смещения, расположенный вблизи первого продольного конца этажерочной структуры;
второй магнитный элемент смещения, расположенный вблизи второго продольного конца этажерочной структуры; и
зажимной элемент, расположенный в центральной продольной области этажерочной структуры, для ограничения перемещения упомянутого множества ферромагнитных элементов относительно друг друга в центральной продольной области, при этом упомянутые первый и второй продольные концы упомянутого множества ферромагнитных элементов выполнены с возможностью углового расхождения.
2. Магнитомеханическое резонаторное устройство по п. 1, в котором зажимной элемент обеспечивает подвешивание каждого ферромагнитного элемента друг относительно друга в центральной продольной области.
3. Магнитомеханическое резонаторное устройство по п. 1, дополнительно содержащее корпус, охватывающий упомянутое резонаторное устройство.
4. Магнитомеханическое резонаторное устройство по п. 1, в котором зажимной элемент содержит штифт, протяженный через каждый из упомянутого множества ферромагнитных элементов.
5. Магнитомеханическое резонаторное устройство по п. 1, в котором зажимной элемент содержит магнитный зажимной элемент.
6. Магнитомеханическое резонаторное устройство по п. 1, дополнительно содержащее первый и второй ограничители перемещения, расположенные соответственно между центральной областью и упомянутыми первым и вторым концами этажерочной структуры, при этом каждый из первого и второго ограничителей перемещения ограничивает степень упомянутого углового расхождения.
7. Магнитомеханическое резонаторное устройство по п. 1, дополнительно содержащее первый концентратор поля, расположенный между упомянутым первым концом этажерочной структуры и первым магнитным элементом смещения, и второй концентратор поля, расположенный между упомянутым вторым концом этажерочной структуры и вторым магнитным элементом смещения.
8. Магнитомеханическое резонаторное устройство по п. 1, в котором каждый из ферромагнитных элементов содержит ферромагнитную металлическую полоску длиной от приблизительно 25 мм до приблизительно 40 мм.
9. Магнитомеханическое резонаторное устройство по п. 1, в котором каждый из ферромагнитных элементов содержит ферромагнитную металлическую полоску длиной от приблизительно 40 мм до приблизительно 65 мм.
10. Магнитомеханическое резонаторное устройство по п. 1, дополнительно содержащее основу для размещения на ней упомянутой этажерочной структуры.
11. Магнитомеханическое резонаторное устройство по п. 10, дополнительно содержащее корпус, охватывающий этажерочную структуру.
12. Магнитомеханическое резонаторное устройство по п. 1, в котором каждый из ферромагнитных элементов содержит аморфный металл.
13. Магнитомеханическое резонаторное устройство по п. 3, в котором корпус выполнен из нежесткого материала.
14. Магнитомеханическое резонаторное устройство по п. 1, характеризующееся частотным диапазоном от приблизительно 34 кГц до приблизительно 80 кГц.
15. Магнитомеханическое резонаторное устройство по п. 1, характеризующееся тем, что выполнено с возможностью его обнаружения под землей на глубине до приблизительно 48 дюймов.
16. Магнитомеханическое резонаторное устройство по п. 3, в котором корпус обладает достаточной гибкостью для обеспечения его прикрепления к свернутой в бухту трубе.
17. Кластерное магнитомеханическое резонаторное устройство, содержащее:
первое множество ферромагнитных элементов, расположенных в виде первой этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец и второй продольный конец;
второе множество ферромагнитных элементов, расположенных в виде второй этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец и второй продольный конец;
первый магнитный элемент смещения, расположенный вблизи первого продольного конца первой этажерочной структуры;
второй магнитный элемент смещения, расположенный вблизи второго продольного конца первой этажерочной структуры, при этом второй магнитный элемент смещения также расположен вблизи первого конца второй этажерочной структуры; и
третий магнитный элемент смещения, расположенный вблизи второго продольного конца второй этажерочной структуры.
18. Кластерное магнитомеханическое резонаторное устройство по п. 17, дополнительно содержащее первый зажимной элемент, расположенный в первой центральной продольной области первой этажерочной структуры, для ограничения вертикального перемещения первого множества ферромагнитных элементов друг относительно друга в первой центральной продольной области и второй зажимной элемент, расположенный во второй центральной продольной области второй этажерочной структуры, для ограничения вертикального перемещения второго множества ферромагнитных элементов друг относительно друга во второй центральной продольной области.
19. Кластерное магнитомеханическое резонаторное устройство по п. 17, дополнительно содержащее множество ферромагнитных элементов, расположенных в виде третьей этажерочной структуры, при этом каждый ферромагнитный элемент имеет первый продольный конец и второй продольный конец, при этом третья этажерочная структура использует магнитный элемент смещения совместно с одной из первой и второй этажерочных структур.
20. Система с магнитомеханическим маркером, содержащая магнитомеханическое резонаторное устройство по п. 1 и портативное устройство обнаружения.
| US 2002140558 A1, 03.10.2000 | |||
| US 2012068823 A1, 22.03.2012 | |||
| Устройство для определения количества материала в сечении вращающейся печи | 1980 |
|
SU916953A1 |
| US 6407676 B1, 18.06.2002 | |||
| US 5786762 A1, 28.07.1998 | |||
| US 2013001314 A1, 03.01.2013. | |||

