Область техники, к которой относится изобретение
Изобретение относится к датчику давления для введения в систему кровообращения человека. Изобретение также относится к стенту, печеночному шунтирующему устройству, проволоке для лечения аневризмы головного мозга и сердечному клапану, соответственно, содержащим датчик давления. Кроме того, изобретение относится к системе считывания, способу и компьютерной программе для беспроводного считывания показаний датчика давления.
Уровень техники
В патентном документе US 2007/0236213 А1 описано измерение давления, основанное, главным образом, на механических резонаторах с прикрепленным намагниченным материалом. Магнитное поле может взаимодействовать с намагниченным материалом и запускать механические колебания. Затем механические колебания детектируют посредством регистрации изменяющегося во времени поля за счет колеблющейся механической структуры. Регистрирующее устройство может представлять собой катушку или другой подходящий магнитометр. Внешнее давление на такое устройство может изменить действительные постоянные пружины и, следовательно, привести к изменению резонансной частоты, которая может быть детектирована. Таким образом формируют датчик давления.
Хотя в принципе такая система работает, она имеет ряд недостатков и не подходит для измерения давления глубоко в организме пациента с достаточной точностью и с помощью достаточно малого устройства. Основная проблема заключается в использовании механического резонатора. Как правило, максимально возможная добротность (фактор качества), достижимая в механических резонаторах, слишком низка для эффективной работы. Существуют некоторые материалы, такие как плавленый кварц, которые обеспечивают высокую добротность при колебании. Эти материалы обычно довольно твердые и не позволяют получить достаточно высокую амплитуду колебаний (достаточно большой угол) для эффективной работы, т.е. для создания достаточно большой вариации поля. Следующей проблемой является низкая чувствительность резонансной частоты к внешнему давлению, поскольку изменяются только упругие параметры. Это в сочетании с низкой добротностью приводит к необходимости достаточно высокого отношения сигнал / шум, что в свою очередь приводит к необходимости большого количества магнитного материала, что делает датчик большим.
Более того, уже существуют имплантируемые датчики давления, например, разработанные компанией CardioMems и раскрытые в патентном документе US 7,147,604 В1. Эти датчики работают по принципу резонансного LC (индуктивно-емкостного) устройства. Резонансная частота смещается под действием механического движения, вызванного давлением, что, в свою очередь, изменяет значение L или С (или и то, и другое). Хотя эта система работает, она не может быть уменьшена до размеров, необходимых для введения в систему кровообращения человека. Основная причина заключается в том, что в патентном документе US 7,147,604 В1 детектируемый сигнал устанавливается пропорционально большой мощности радиуса катушки датчика давления. Это создает жесткое ограничение для уменьшения размеров датчика давления.
Раскрытие сущности изобретения
Поэтому целью настоящего изобретения является создание датчика давления, который предназначен для введения в систему кровообращения человека, имеет очень малые размеры и, тем не менее, обеспечивает высококачественное измерение давления. Изобретение также относится к стенту, печеночному шунтирующему устройству, проволоке для лечения аневризмы головного мозга и сердечному клапану, соответственно, содержащим датчик давления. Кроме того, изобретение относится к системе считывания, способу и компьютерной программе для беспроводного считывания показаний датчика давления.
В первом аспекте настоящего изобретения предложен датчик давления для введения в систему кровообращения человека, причем датчик давления представляет собой пассивный датчик, выполненный с возможностью беспроводного считывания его показаний с помощью системы считывания, размещенной снаружи человека, при этом датчик давления содержит корпус с блокирующим диффузию слоем, который покрывает по меньшей мере часть корпуса, и который выполнен с возможностью поддержания предварительно заданного давления внутри корпуса, при этом датчик давления содержит внутри корпуса магнитомеханический генератор колебаний с магнитным объектом, обеспечивающим постоянный магнитный момент, причем магнитомеханический генератор колебаний выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в механическое колебание магнитного объекта, при этом по меньшей мере часть корпуса является гибкой для обеспечения возможности преобразования изменений внешнего давления в изменения механического колебания магнитного объекта, причем магнитный объект расположен внутри корпуса таким образом, что он может поворачиваться за пределы равновесной ориентации, если на магнитный объект действует внешнее магнитное или электромагнитное поле возбуждения, при этом датчик давления дополнительно содержит блок восстановления крутящего момента, выполненный с возможностью обеспечения восстанавливающего крутящего момента, чтобы вернуть магнитный объект в равновесную ориентацию, если внешнее магнитное или электромагнитное поле возбуждения повернуло магнитный объект из равновесной ориентации, чтобы обеспечить механическое колебание магнитного объекта с резонансной частотой, причем блок восстановления крутящего момента содержит дополнительный магнитный объект, являющийся постоянным магнитом, для создания магнитного поля в таком положении магнитного объекта, чтобы он обеспечивал восстанавливающий крутящий момент, причем датчик давления выполнен таким образом, что изменения внешнего давления могут быть преобразованы в изменения резонансной частоты.
Поскольку в датчике давления используется магнитомеханический генератор колебаний (осциллятор), который в основном использует магнетизм для накопления энергии колебаний, одновременно может быть достигнута высокая добротность, высокая амплитуда колебаний и высокая чувствительность к внешним воздействиям при использовании датчика давления с очень малыми размерами, подходящего для введения в систему кровообращения человека.
Размеры датчика давления предпочтительно таковы, что его можно вводить в систему кровообращения вне главной легочной артерии. Предпочтительно датчик давления имеет удлиненную форму с максимальным размером, меньшим или равным 5 мм, еще более предпочтительно, чтобы он был меньше или равен 4 мм, а минимальный размер был меньше или равен 1 мм. Эти размеры преимущественно относятся к продольному направлению и поперечному направлению датчика давления. Таким образом, предпочтительно, в продольном направлении размер датчика давления меньше или равен 5 мм, еще более предпочтительно меньше или равен 4 мм, а в поперечном направлении размер датчика давления меньше или равен 1 мм.
В предпочтительном варианте осуществления датчик давления содержит внешнее биосовместимое покрытие. Кроме того, предпочтительно гибкая часть корпуса содержит сильфон, для обеспечения возможности преобразования изменений внешнего давления в изменения механического колебания магнитного объекта. Сильфон особенно подходит для обеспечения возможности преобразования изменений внешнего давления в изменения механических колебаний магнитного объекта, поскольку он обеспечивает гибкость, достаточную для измерения давления, даже если он покрыт, например, блокирующим диффузию слоем и/или биосовместимым покрытием. Сильфон может быть изготовлен из довольно гибкого материала, такого как силиконовый каучук.
Датчик давления может дополнительно содержать внешний чехол поверх сильфона. Внешний чехол можно использовать, чтобы избежать образования сгустков крови (тромбов). Внешний чехол предпочтительно достаточно мягкий, чтобы позволить сильфону изменяться в ответ на внешнее давление.
Блокирующий диффузию слой преимущественно содержит металл. Например, он может быть выполнен в виде металлического покрытия на корпусе датчика давления.
В одном варианте осуществления датчик давления дополнительно содержит внешний проволочный каркас, прикрепленный к внешней стороне корпуса для обеспечения возможности сохранения расстояния между внешней стороной корпуса и стенкой сосуда. Проволочный каркас может быть предпочтительным для непосредственной доставки в сосуд, при этом каркас может фиксировать датчик давления, не блокируя просвет сосуда. Каркас может содержать кольцеобразную или дискообразную центральную часть, из которой выступают изогнутые ножки. Он может быть изготовлен из проволочного материала, например нитинола, благодаря его высокой гибкости и хорошей биосовместимости. Также можно использовать другие материалы, такие как нержавеющая сталь или полимеры. Альтернативой проволоке являются структуры, вырезанные из листовых материалов, которым можно придать согнутую форму с помощью пресс-формы и термообработки. Особенно для полимеров также возможно литье под давлением. Для соединения с корпусом датчика кольцеобразная или дискообразная структура может действовать в качестве интерфейса между каркасом и корпусом датчика. Кольцеобразная структура может быть прорезана на цилиндрическом кожухе и может быть закреплена за счет усилия пружины и/или посредством склеивания или сварки. Дискообразная структура может быть приклеена или приварена к датчику давления.
Магнитный объект расположен внутри корпуса таким образом, что он может поворачиваться за пределы равновесной ориентации, если на магнитный объект действует внешнее магнитное или электромагнитное поле возбуждения, при этом датчик давления дополнительно содержит блок восстановления крутящего момента, выполненный с возможностью обеспечения восстанавливающего крутящего момента, чтобы вернуть магнитный объект в равновесную ориентацию, если внешнее магнитное или электромагнитное поле возбуждения повернуло магнитный объект из равновесной ориентации, чтобы обеспечить механические колебания магнитного объекта с резонансной частотой, при этом датчик давления выполнен таким образом, что изменения внешнего давления преобразуются в изменения резонансной частоты.
Блок восстановления крутящего момента содержит дополнительный магнитный объект для создания магнитного поля в таком положении магнитного объекта, чтобы он обеспечивал восстанавливающий крутящий момент. Более того, помимо магнитного объекта, также дополнительный магнитный объект представляет собой постоянный магнит. Кроме того, магнитный объект предпочтительно представляет собой магнитную сферу. Также, дополнительный магнитный объект может представлять собой магнитную сферу. Однако магнитный объект и также дополнительный магнитный объект также могут иметь другую форму. Например, они могут быть цилиндрическими. Магнитный объект предпочтительно прикреплен к одному концу нити, при этом другой конец нити прикреплен к корпусу. Также дополнительный магнитный объект может быть прикреплен к одному концу нити, при этом другой конец нити может быть прикреплен к корпусу. Однако дополнительный магнитный объект также может быть зафиксирован.
В одном варианте осуществления магнитный объект и/или внутренняя часть корпуса покрыты скользким и нелипким материалом. Предпочтительно скользкий и нелипкий материал представляет собой графит. Также дополнительный магнитный объект может быть покрыт скользким и нелипким материалом. Предпочтительно, нелипкий материал считается "скользким", если коэффициент трения в сухом состоянии, т.е. без смазки, составляет менее 0,2 и еще более предпочтительно - менее 0,1.
Как правило, если датчик давления был введен в тело человека, может возникнуть проблема, если тело необходимо сканировать с помощью сканера магнитно-резонансной томографии (МРТ). Указанная проблема не представляет опасности для организма, т.е. для пациента, поскольку датчик давления относительно мал и, следовательно, вызывает лишь небольшие усилия и крутящие моменты, которые не представляют угрозы для пациентов. Аналогичным образом, магнитно-резонансное изображение, полученное с помощью сканера МРТ, также не может быть испорчено, поскольку датчик давления имеет очень малые размеры.
Однако во многих клинических сканерах МРТ используют высокую напряженность поля более 1,5 Тл, и сильное магнитное поле может разрушить датчик давления, изменив намагниченность магнитного объекта или повредив механическую конструкцию внутри устройства. По этой причине в одном варианте осуществления датчик давления сконструирован таким образом, что магнитный объект может быть выровнен с внешним магнитным полем независимо от положения и ориентации датчика давления во внешнем магнитном поле. Например, датчик давления может содержать внешний кожух, охватывающий корпус, при этом корпус может вращаться внутри охватывающего кожуха, при этом датчик давления выполнен таким образом, что изменения внешнего давления за пределами охватывающего кожуха преобразуются в изменения внешнего давления, происходящие снаружи корпуса и внутри охватывающего кожуха. Внешний кожух может быть сферическим или эллиптическим. Кроме того, внешний кожух также может быть заполнен текучей средой, причем указанная текучая среда предпочтительно является высоковязкой текучей средой. Термин "высоковязкий" предпочтительно относится к вязкости, которая такова, что при плотности магнитного потока в 0,1 Тл максимальная скорость вращения устройства ограничена менее чем 10000 градусами в секунду или угловой скоростью не выше 160 с-1. Для типичных конфигураций устройства это означает, что вязкость составляет от 1 до 100 Па, как минимум. Основным определяющим фактором является объемная доля магнитно-твердого материала. Существует также максимальная полезная вязкость, которая примерно в 100-1000 раз превышает минимальную полезную вязкость.
Кожух может быть, например, очень мягким кожухом, заполненным текучей средой, или кожухом с отверстиями, чтобы эффективно преобразовывать изменения внешнего давления в изменения механических колебаний магнитного объекта. Предпочтительно кожух считается "очень мягким", если изменение давления внутри кожуха не отклоняется более чем на 0,2 мбар (20 Па) от внешнего давления в масштабе времени ожидаемого изменения давления, которое обычно составляет от 0,01 до 1 с. Самое твердое известное вещество, приведенное в правильную форму при достаточной малой толщине, может образовывать "очень мягкий" кожух. Тогда кожух предпочтительно включает в себя структуры, которые действуют как сильфон.
Магнитный объект предпочтительно представляет собой магнитную сферу, которая прикреплена к одному концу нити, при этом другой конец нити прикреплен к внутренней части корпуса, причем в одном варианте осуществления нить имеет длину, составляющую по меньшей мере Пи/4 диаметра магнитной сферы. Если также дополнительный магнитный объект представляет собой магнитную сферу, он может быть прикреплен к одному концу другой нити, при этом другой конец другой нити прикреплен к корпусу. Предпочтительно также, чтобы другая нить имела длину, составляющую по меньшей мере Пи/4 диаметра, в данном случае, другой магнитной сферы. Эти длины нитей обеспечивают свободное выравнивание магнитных объектов с внешним магнитным полем. Магнитная сфера и другая магнитная сфера предпочтительно имеют одинаковый диаметр.
Более того, в одном варианте осуществления магнитный объект представляет собой магнитную сферу, которая прикреплена к одному концу нити, при этом другой конец нити прикреплен к блоку изменения длины, выполненному с возможностью изменения длины нити и прикрепленному к внутренней части корпуса. Блок изменения длины может представлять собой, например, блок намотки. Блок намотки может содержать наматывающий механизм. Предпочтительно, датчик давления выполнен таким образом, чтобы длина нити от магнитной сферы до блока изменения длины имела возможность регулировки таким образом, чтобы она была равна предварительно заданной длине. Например, нить и/или блок изменения длины могут содержать стопор, расположенный и выполненный с возможностью остановки, в то время как блок изменения длины укорачивает длину нити, дальнейшего укорачивания нити, если длина нити от магнитной сферы до блока изменения длины достигла предварительно заданной длины. В одном варианте осуществления стопор расположен и выполнен с возможностью остановки намотки нити, если длина нити от магнитной сферы до блока намотки достигла предварительно заданной длины.
В одном варианте осуществления блок изменения длины содержит пружину, имеющую усилие пружины, причем пружина выполнена таким образом, и нить прикреплена к пружине таким образом, что усилие пружины выталкивает нить из корпуса датчика давления в блок изменения длины, чтобы сократить длину нити в корпусе датчика давления, и при этом длина нити в корпусе датчика давления может быть увеличена, если сила, действующая на магнитный объект, вытягивает нить из блока изменения длины противоположно усилию пружины. Блок изменения длины может содержать стопор, выполненный и расположенный с возможностью ограничения релаксации пружины таким образом, чтобы нить внутри корпуса датчика давления имела предварительно заданную длину, если никакая сила не действует противоположно усилию пружины.
В предпочтительном варианте осуществления датчик давления выполнен с возможностью компенсации зависимости резонансной частоты от температуры. В частности, датчик давления содержит компенсационный элемент, который выполнен с возможностью изменения резонансной частоты в первом частотном направлении в зависимости от изменения температуры, которое противоположно второму частотному направлению, в котором резонансная частота датчика давления была бы изменена в зависимости от изменения температуры, если бы компенсационный элемент не был частью датчика давления. Поскольку измерительное устройство содержит компенсационный элемент, который выполнен с возможностью изменения резонансной частоты в первом частотном направлении в зависимости от изменения температуры, которое противоположно второму частотному направлению, в котором резонансная частота была бы изменена в зависимости от изменения температуры, если бы компенсационный элемент не был частью датчика давления, вызванные температурой сдвиги резонансной частоты могут быть уменьшены или даже устранены. Первое частотное направление представляет собой направление к более высоким или более низким частотам, а противоположное второе частотное направление представляет собой направление к более низким или более высоким частотам, соответственно.
Предпочтительно компенсационный элемент содержит магнитный материал, который изменяет свою намагниченность и, следовательно, резонансную частоту в зависимости от температуры, при этом магнитный материал выбран и расположен внутри датчика давления, в частности внутри корпуса, таким образом, что направление изменения резонансной частоты является первым частотным направлением. Компенсирующий магнитный материал предпочтительно расположен рядом с магнитным объектом и/или рядом с дополнительным магнитным объектом, если таковой имеется. Это позволяет сконструировать датчик давления таким образом, чтобы нежелательная температурная зависимость могла быть значительно уменьшена или даже устранена технически относительно простым способом и без необходимости большого пространства внутри корпуса.
В одном варианте осуществления магнитный объект представляет собой магнитную сферу, которая прикреплена к одному концу нити, при этом другой конец нити непосредственно или опосредованно прикреплен к корпусу, при этом магнитная сфера содержит сквозное отверстие, проходящее через центр тяжести магнитного объекта, при этом один конец нити расположен и зафиксирован в указанном сквозном отверстии. Это крепление лишь на малую долю уменьшает магнитный дипольный момент и, следовательно, сохраняет хороший сигнал. Форма магнитного объекта не сильно изменяется, что может быть важно в случае сфер.
Кроме того, в одном варианте осуществления магнитный объект представляет собой магнитную сферу, которая прикреплена к одному концу нити, при этом другой конец нити непосредственно или опосредованно прикреплен к корпусу, при этом один конец нити зажат между двумя магнитными компонентами магнитного объекта, которые образуют магнитный объект. Этот способ крепления дает результаты почти такие же хорошие, как способ крепления через отверстие, но не требует специального оборудования для изготовления.
В одном варианте осуществления магнитный объект представляет собой магнитную сферу, которая приклеена к одному концу нити, при этом другой конец нити непосредственно или опосредованно прикреплен к корпусу. Этот способ технически очень прост и полностью использует магнитный объект.
Более того, в одном варианте осуществления магнитный объект представляет собой магнитную сферу, прикрепленную к немагнитному объекту, причем указанный немагнитный объект прикреплен к одному концу нити, при этом другой конец нити непосредственно или опосредованно прикреплен к корпусу. Кроме того, это позволяет относительно просто прикрепить нить к магнитному объекту.
В другом аспекте настоящего изобретения предусмотрен стент, содержащий датчик давления. Например, датчик давления может быть расположен на дистальной стороне стента для индикации рестеноза внутри стента. В одном варианте осуществления стент содержит несколько датчиков давления, чтобы, например, отслеживать падение давления на всем стенте или на его части в качестве параметра для рестеноза в стенте. Раннее выявление позволяет скорректировать медикаментозное лечение или своевременно провести повторное стентирование, тем самым избегая незапланированной госпитализации.
В другом аспекте настоящего изобретения предусмотрено печеночное шунтирующее устройство, содержащее датчик давления. Например, датчик давления может быть расположен на проксимальной стороне шунтирующего устройства, чтобы отслеживать, происходит ли снижение давления, т.е. открыт ли шунт. Также печеночное шунтирующее устройство может содержать несколько датчиков давления, в частности, для отслеживания падения давления. Кроме того, и здесь раннее выявление позволяет скорректировать медикаментозное лечение или своевременно провести повторное стентирование, тем самым избегая незапланированной госпитализации.
В другом аспекте настоящего изобретения предусмотрена проволока для лечения аневризмы головного мозга, которая содержит датчик давления. Проволока может быть использована для мотка, что должно привести к свертыванию крови для заполнения пространства аневризмы. Датчик давления может быть использован для индикации того, действительно ли происходит свертывание крови, т.е. уменьшается ли вариация (изменение) пульсирующего артериального давления.
В другом аспекте настоящего изобретения предусмотрен сердечный клапан, содержащий датчик давления. Например, первый датчик давления может быть размещен на проксимальной стороне, а второй датчик давления может быть размещен на дистальной стороне сердечного клапана, чтобы отслеживать падение давления по фазам сердцебиения. Из отслеживаемого динамического изменения давления можно извлечь информацию о функционировании клапана. Датчик локализации также может быть размещен непосредственно на подвижной части клапана, чтобы не только передавать информацию о давлении, но и информацию о перемещении посредством пространственной локализации и определения ориентации датчика.
В другом аспекте настоящего изобретения предусмотрена система считывания для беспроводного считывания показаний датчика давления по любому из п.п. 1-11, причем система считывания содержит:
- генератор поля для генерации магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта датчика давления,
- преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика,
- процессор для определения значения давления на основе электрических сигналов отклика, причем процессор выполнен с возможностью применения алгоритма компенсации, чтобы корректировать определение значения давления для зависимости электрических сигналов отклика по меньшей мере от одного из следующего:
a) расстояние между датчиком давления и генератором поля;
b) фаза механического колебания магнитного объекта;
c) ориентация корпуса относительно системы считывания; и
d) амплитуда механического колебания магнитного объекта.
Генератор поля и преобразователь могут быть двумя отдельными блоками или они могут быть объединены, причем, если генератор поля и преобразователь объединены, одни и те же катушки могут использоваться для генерации магнитного или электромагнитного поля возбуждения и для преобразования магнитного или электромагнитного поля, генерируемого индуцированным механическим колебанием магнитного объекта датчика давления, в электрические сигналы отклика.
В предпочтительном варианте осуществления процессор выполнен с возможностью применения алгоритма компенсации, чтобы скорректировать определение значения давления для зависимости резонансной частоты по меньшей мере от одного из а) расстояния между датчиком давления и генератором поля и b) синфазного возбуждения катушки.
Большой магнитный момент магнитного объекта желателен, поскольку он создаст более сильный отклик для улавливания преобразователем, который может содержать соответствующие воспринимающие катушки. Однако большой магнитный момент означает большую восстанавливающую силу, а это значит, что результирующее колебательное движение будет иметь большую амплитуду. Когда происходят большие колебания, при большом угловом смещении восстанавливающая сила уменьшается. Следовательно, для такого колебания частота отклика будет зависеть от восстанавливающей силы, которая зависит от расстояния между катушками генератора поля и датчика давления. Для решения этой проблемы процессор может быть выполнен с возможностью корректировки определения значения давления для зависимости резонансной частоты от расстояния между датчиком давления и генератором поля.
Внутрисосудистое давление меняется в течение сердечного цикла. Обычная частота сердечных сокращений у человека обычно составляет от 50 до 90 ударов в минуту с возможными максимумами до 200 ударов в минуту. Для определения минимумов и максимумов давления во время сердечного цикла частота измерений не должна быть меньше примерно 5 Гц. Предпочтительно, частота измерения составляет от 10 до 20 Гц, наиболее предпочтительно выше 40 Гц. С другой стороны, для обеспечения хорошего отношения сигнал / шум предпочтительна очень высокая добротность Q генератора колебаний, при этом высокая добротность Q означает медленное затухание. Следовательно, когда на датчик передается следующий импульс измерения, колебания от предыдущего импульса измерения могут быть не полностью погашены, и они могут повлиять на измерение. Таким образом, компенсируя это синфазное возбуждение катушки, можно лучше сочетать высокую добротность с частотой измерения, достаточно большой, чтобы обеспечить измерение сердечных минимумов и максимумов.
В другом аспекте настоящего изобретения предусмотрен способ измерения давления для выполнения измерения с использованием датчика давления по любому из п.п. 1-11, причем способ измерения давления содержит:
- генерирование магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта датчика давления,
- преобразование магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика,
- определение значения давления на основе электрических сигналов отклика, причем на этапе определения значение давления корректируют для зависимости электрических сигналов отклика по меньшей мере от одного из следующего:
a) расстояние между датчиком давления и генератором поля;
b) фаза механического колебания магнитного объекта;
c) ориентация корпуса относительно системы считывания; и
d) амплитуда механического колебания магнитного объекта.
Кроме того, в другом аспекте настоящего изобретения предусмотрена компьютерная программа, которая содержит программное кодовое средство для побуждения системы считывания по п. 13 осуществлять этапы способа измерения давления, когда компьютерная программа выполняется на компьютере, управляющем системой считывания.
Следует понимать, что датчик давления по п. 1, имплантируемое устройство по п. 12, в частности, стент, печеночное шунтирующее устройство, проволока и сердечный клапан, система считывания по п. 13, способ измерения давления по п. 14 и долговременный носитель, содержащий компьютерную программу по п. 15, имеют аналогичные и/или идентичные предпочтительные варианты осуществления, в частности, как они определены в зависимых пунктах.
Следует понимать, что предпочтительным вариантом осуществления настоящего изобретения также может быть любая комбинация зависимых пунктов формулы изобретения или вышеуказанных вариантов осуществления с соответствующим независимым пунктом формулы.
Эти и другие аспекты настоящего изобретения станут очевидными и будут разъяснены со ссылкой на варианты осуществления, описанные ниже.
Краткое описание чертежей
На нижеследующих чертежах показаны:
на фиг. 1 схематично и в качестве примера показан вариант осуществления датчика давления в ситуации с первым внешним давлением,
на фиг. 2 схематично и в качестве примера показан вариант осуществления фиг. 1 в ситуации, когда второе давление больше первого давления,
на фиг. 3 схематично и в качестве примера показаны различные варианты осуществления датчика давления с сильфоном,
на фиг. 4 схематично и в качестве примера показан дополнительный вариант осуществления датчика давления,
на фиг. 5 схематично и в качестве примера показаны дополнительные варианты осуществления датчика давления с сильфоном,
на фиг. 6 и 7 схематично и в качестве примера показан вариант осуществления проволочного направителя с датчиком давления,
на фиг. 8 схематично и в качестве примера показан вариант осуществления стента с датчиками давления,
на фиг. 9 схематически и в качестве примера показан вариант осуществления сердечного клапана с датчиками давления,
на фиг. 10 схематично и в качестве примера показан вариант осуществления проволоки для лечения аневризмы головного мозга с датчиками давления,
на фиг. 11 схематично и в качестве примера показан вариант осуществления печеночного шунта с датчиками давления,
на фиг. 12 схематично и в качестве примера показан вариант осуществления датчика давления,
на фиг. 13 схематично и в качестве примера показан вариант осуществления с фиг. 1 в ситуации с большим внешним магнитным полем,
на фиг. 14 показан вариант осуществления датчика давления со сферическим внешним кожухом,
на фиг. 15 схематично и в качестве примера показан вариант осуществления датчика давления с эллиптическим внешним кожухом,
на фиг. 16 схематично и в качестве примера показан дополнительный вариант осуществления датчика давления с относительно длинными нитями,
на фиг. 17 схематично и в качестве примера показан вариант осуществления измерительного (чувствительного) устройства с блоками намотки и стопорами,
на фиг. 18 схематично и в качестве примера показан вариант осуществления блока намотки,
на фиг. 19 схематично и в качестве примера показан вариант осуществления датчика давления с температурной компенсацией,
на фиг. 20 и 21 схематично и в качестве примера показана система детектирования для считывания резонансной частоты датчика,
на фиг. 22 схематично и в качестве примера показаны импульсы возбуждения и результирующие индуцированные напряжения,
на фиг. 23 схематично и в качестве примера показан массив из нескольких катушек, встроенный в матрас кровати пациента системы визуализации,
на фиг. 24 схематично и в качестве примера показаны катушки системы детектирования,
на фиг. 25 показан частотный спектр, используемый для определения резонансной частоты,
на фиг. 26 схематично и в качестве примера показан аналоговый фильтр приема,
на фиг. 27 в качестве примера показана частотная характеристика полосы пропускания фильтра Чебышева II рода,
на фиг. 28 схематично и в качестве примера показана калибровочная установка для калибровки датчика давления,
на фиг. 29 в качестве примера показана зависимость детектируемой частоты отклика датчика от измеренного эталонного давления,
на фиг. 30 в качестве примера показаны i) согласование детектируемой частоты отклика датчика с измеренным эталонным давлением и ii) калибровочная кривая,
на фиг. 31 в качестве примера показаны результаты моделирования чувствительности датчика,
на фиг. 32 в качестве примера показан уровень шума при измерении давления,
на фиг. 33 показана измеренная зависимость амплитуды сигнала в разных гармониках от ориентации датчика относительно одной приемо-передающей катушки, и
на фиг. 34 схематично и в качестве примера показан дополнительный вариант осуществления датчика давления.
Осуществление изобретения
На фиг. 1 схематично и в качестве примера показан вариант осуществления датчика 501 давления для введения в систему кровообращения человека. Датчик 501 давления содержит магнитомеханический резонатор с двумя магнитными элементами 507, 508.
Магнитный элемент 508 подвешен на нити 506 и, таким образом, может свободно совершать вращательное движение вокруг главной оси резонатора. В этом варианте осуществления дополнительный магнитный объект 507 зафиксирован. Однако в другом варианте осуществления дополнительный магнитный элемент также может быть подвешен на нити и, таким образом, может свободно совершать вращательное движение вокруг главной оси резонатора.
В равновесии магниты 507, 508, соответственно, выровнены с антипараллельной ориентацией их намагниченности. Импульс внешнего магнитного поля может быть использован для запуска резонансных вращательных колебаний. Сила притяжения определяет резонансную частоту колебаний, которая для сферического подвешенного магнита определяется как:

где MS - намагниченность насыщения магнитного материала, ρ - его плотность, r - диаметр сферы и В - поле, создаваемое неподвижным (зафиксированным) магнитом. Его можно аппроксимировать в качестве поля диполя

где m - магнитный момент магнита.
Изменение поля, создаваемое колеблющимся магнитным элементом, может быть детектировано с помощью индуцированного напряжения в одной или нескольких детекторных катушках преобразователя, который выполнен с возможностью преобразования магнитного или электромагнитного поля, создаваемого механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика. Временная кривая детектируемого сигнала (см. фиг. 13) может быть подвергнута преобразованию Фурье для получения спектра (см. фиг. 16), который позволяет определить резонансную частоту.
Из-за низких резонансных частот в несколько кГц магнитные поля не экранируются металлом, и поэтому все неферромагнитные металлы могут быть использованы в качестве конструкционных материалов или материалов для покрытий. Аналогичным образом, датчик может быть помещен в неферромагнитные металлические предметы без влияния на его работу, если толщина металла не сильно превышает глубину поверхностного слоя (скин-слоя). На этих частотах для очень хороших проводников, таких как медь, глубина поверхностного слоя составляет порядка одного миллиметра, в то время как для нитинола глубина поверхностного слоя составляет около 10 миллиметров.
Базовый магнитомеханический генератор колебаний содержит два магнитных элемента, причем в равновесии магнитные элементы выровнены с антипараллельной намагниченностью. Импульс внешнего поля может быть использован для запуска вращательного колебания подвешенной сферы вокруг главной оси резонатора, при этом другая сфера, т.е. дополнительный магнитный объект, зафиксирована. Если в другом варианте осуществления также другая сфера подвешена в свободном пространстве и может совершать вращательные колебания, обе сферы могут совершать резонансные встречные колебания.
В патентном документе US 2007/0236213 А1 описаны, главным образом, механические резонаторы с прикрепленным намагниченным материалом. Магнитное поле может взаимодействовать с намагниченным материалом и запускать механические колебания. Затем механические колебания детектируют посредством регистрации изменяющегося во времени поля за счет колеблющейся механической структуры. Регистрирующее устройство может представлять собой катушку или другой подходящий магнитометр. Внешнее давление на такое устройство может изменить действительные постоянные пружины и, следовательно, привести к изменению резонансной частоты, которая может быть детектирована. Таким образом формируют датчик давления.
Хотя в принципе такая система работает, она имеет, как также упоминалось выше, ряд недостатков и не подходит для измерения давления глубоко в организме пациента с достаточной точностью и с помощью достаточно малого устройства. Основная проблема заключается в использовании механического резонатора. Как правило, максимально возможная добротность (фактор качества), достижимая в механических резонаторах, слишком низка для эффективной работы. Существуют некоторые материалы, такие как плавленый кварц, которые обеспечивают высокую добротность при колебании. Эти материалы обычно довольно твердые и не позволяют получить достаточно высокую амплитуду колебаний (достаточно большой угол) для эффективной работы, т.е. для создания достаточно большой вариации поля. Следующей проблемой является низкая чувствительность резонансной частоты к внешнему давлению, поскольку изменяются только упругие параметры. Это в сочетании с низкой добротностью приводит к необходимости достаточно высокого отношения сигнал / шум, что в свою очередь приводит к необходимости большого количества магнитного материала, что делает датчик большим. Еще одной проблемой устройства, раскрытого в US 2007/0236213 А1, является встраивание высокопрочного постоянного магнита в устройство. Лучшими постоянными магнитами являются магниты спеченного типа. Они несовместимы с производственным процессом микроэлектромеханических систем (МЭМС). Таким образом, либо производство является сложным, либо необходимо использовать магнитный материал низшего качества. Положительным фактором является относительно высокая рабочая частота датчика, раскрытая в патентном документе US 2007/0236213 А1. Недостатком является то, что шум в корпусе также увеличивается с частотой, и выше нескольких сотен кГц усиление больше не наблюдается. Так что заявленные гигагерцовые резонансные частоты не помогают. Для работы на высокой частоте также требуется быстрое переключение из режима передачи в режим приема, что является технически сложной задачей. Еще одной проблемой решения из US 2007/0236213 А1 является долговечность. При достаточно высокой величине произведения амплитуды и частоты материал пружины подвергается значительному напряжению, что может привести к поломке.
Этих проблем позволяет избежать конструкция, предложенная, например, на фиг. 1. Поскольку энергия накапливается в основном в магнитном поле, относительно легко достичь высокой добротности. Также возможны высокие амплитуды колебаний. Тонкая нить не подвергается сильному износу. Резонанс можно легко изменить, изменив магнитное поле путем механического перемещения магнитов относительно друг друга. Это также легко согласуется с изменением давления (с использованием материалов с правильной податливостью и правильной формы, как описано ниже), поэтому может быть достигнуто довольно высокое изменение частоты. Датчик может быть изготовлен из наилучшего доступного магнитного материала, причем объемная доля магнитного материала высока.
Уже существуют, как также объяснялось выше, имплантируемые датчики давления, например, разработанные компанией CardioMeMS и раскрытые в патентном документе US 7147604 В1. Эти датчики работают по принципу резонансного LC (индуктивно-емкостного) устройства. Резонансная частота смещается под действием механического движения, вызванного давлением, что, в свою очередь, изменяет значение L или С (или и то, и другое). Хотя эта система работает, ее нельзя уменьшить до размеров, необходимых для предполагаемых применений. Это неотъемлемая проблема LC-генератора колебаний. При уменьшении размеров уровень мощности, который может генерироваться генератором колебаний, и динамический дипольный момент, генерируемый мощностью, уменьшаются. Это можно увидеть в следующем уравнении. Добротность резонатора не может быть выше добротности катушки. Аппроксимацию добротности катушки можно записать в виде:

где ω - частота, μ0 - магнитная проницаемость вакуума, ρ - удельное сопротивление, τ - доля радиуса, состоящего из проводника, и r - радиус катушки. Предполагается, что катушка имеет цилиндрическую форму с диаметром, соответствующим высоте. Для медной катушки диаметром 1 мм при частоте 100 кГц добротность составляет около 1. Такая катушка явно не будет работать. Для катушек диаметром 1 см (или более), используемых компанией CardioMeMS, добротность превышает 100 при 100 кГц и превышает 1000 при 1 МГц. Приведенная выше формула осуществляет переоценку практически достижимых значений добротности Q, поскольку предполагает, что весь объем заполнен проводящим материалом, и пренебрегает эффектом близости и скин-эффектом, а также потерями в конденсаторе. Тем не менее, эти значения приводят к созданию работающей системы. В патентном документе US 7147604 В1 указана измеренная добротность, составляющая 48 в диапазоне от 1 до 100 МГц. Поскольку динамический дипольный момент LC-генератора колебаний представляет собой добротность Q, умноженную на внешнее магнитное поле, умноженное на объем, сигнал устанавливается пропорционально r5, в то время как в случае механического генератора колебаний (энергия, запасенная в упругости) сигнал устанавливается пропорционально r3, а в случае вариантов осуществления, описанных, например, со ссылкой на фиг. 1 (магнитомеханический генератор колебаний, энергия, запасенная в магнитном поле), сигнал устанавливается пропорционально r2, а частота обратно пропорциональна линейным размерам. Таким образом, представленное здесь предложение очень хорошо подходит для миниатюризации датчиков.
В варианте осуществления с неподвижной (зафиксированной) сферой неподвижная сфера может иметь диаметр 620 мкм, тогда как колеблющаяся сфера 108 может иметь диаметр 500 мкм. Магнитный момент колеблющейся сферы 108 может составлять m≈70 мкАм2, базовая частота может составлять ƒ0≈2 кГц, а добротность может быть примерно Q≈500. Отношение сигнал / шум (SNR, от англ. signal to noise ratio) зависит от расстояния между а) катушкой, используемой для считывания резонансной частоты, и b) измерительным (чувствительным) устройством, а также от параметров катушки. Для портативной катушки диаметром 10 см с 200 витками и сопротивлением 10 Ом теоретически достижимое отношение сигнал / шум на расстоянии около 30 см и при длительности выборки в 0,1 с составляет примерно 4000. Однако типичные значения отношения сигнал / шум демонстрационного образца с неподвижной сферой могут составлять от 10 до 100, если практически не были приняты меры по подавлению фонового сигнала. Таким образом, шум в основном определяется флуктуациями гармоник сетевого источника питания. Для диаметров в половину сферы, т.е., например, 250 мкм для колеблющейся сферы, магнитный момент может составлять m≈9 мкАм2, базовая частота может составлять ƒ0≈4 кГц, добротность может оставаться неизменной, а теоретическое отношение сигнал / шум может упасть примерно до 1000.
Существует несколько способов прикрепления нити к подвижному магнитному объекту.
Например, можно использовать крепление в сквозном отверстии. В этом случае отверстие просверливают через центр тяжести и примерно перпендикулярно намагниченности. Хотя материал магнита твердый и хрупкий, существует несколько способов сверления отверстий, таких как импульсная лазерная или электроразрядная механическая обработка (EDM, от англ. electrical discharge machining). Нить пропускается через отверстие и приклеивается в нужном месте. Пропускание лучше всего производить с помощью процесса вакуумного всасывания. Можно использовать несколько типов клея. Экономичными являются клеи легкого отверждения. Они должны иметь низкую вязкость, чтобы заполнить отверстие с нитями просто за счет капиллярной силы. В качестве альтернативы или в дополнение нить может быть прикреплена к магнитному объекту механическими средствами. Например, за счет узла в нити или какой-либо другой толстой части нити, такой как капля клея или образованный за счет тепла (расплавленный) шарик. Последнее особенно легко изготавливается из волокон сверхмолекулярного полиэтилена (СВМПЭ). Этот способ крепления лишь на малую долю уменьшает магнитный дипольный момент и, следовательно, подстраивает хороший сигнал. Форма магнитного объекта не сильно изменяется, что может быть важно в случае сфер.
Также можно использовать зажимное крепление. В этом случае магнитный объект разделяется по меньшей мере на два компонента. Предпочтительно создается плоскость разделения, ортогональная намагниченности и параллельная направлению прикрепления нити. Нить помещается на эту плоскость. Точное выравнивание не требуется. Вторая магнитная часть помещается сверху. Магнитные детали обычно удерживаются вместе магнитными силами. Наконец, наносится клей, чтобы закрепить все на своих местах. Предпочтительные типы клея такие же, как и для процесса крепления в сквозном отверстии. Кроме того, можно выточить канавку в одном или обоих магнитных объектах, чтобы уменьшить общий зазор между магнитными объектами. Этот способ дает результаты почти такие же хорошие, как способ с использованием сквозного отверстия, но не требует специального оборудования для изготовления. Обычно магнитные подобьекты создают не путем разделения одного полного магнитного объекта, а путем стачивания двух (идентичных) магнитных объектов. Недостатком является то, что этот процесс более расточителен, так как используются два исходных объекта, и процесс также может быть несколько более трудоемким.
Самый дешевый способ - это непосредственное прикрепление нити к магнитному объекту с помощью подходящего клея. Магнитный объект удерживают и выравнивают с помощью какого-то инструмента. Обе функции могут быть реализованы с помощью подходящих магнитных полей. Инструмент может иметь форму воронки с нитью, проходящей через воронку, при этом магнитный объект прикрепляют к отверстию воронки за счет магнитных сил. Клей наносят в воронку и отверждают. Затем узел извлекают из инструмента и ненужную часть нити обрезают. Этот способ может быть очень дешевым и полностью использует магнитный объект. Недостатком является то, что добавляется значительное количество материала, что снижает частоту колебаний и требует места в готовом устройстве.
В другом варианте осуществления может быть использована структура для крепления и дополнительного приклеивания. Можно прикрепить нить к магнитному объекту, сначала прикрепив ее к немагнитному объекту, а затем приклеив немагнитный объект к магнитному. Немагнитный объект может быть изготовлен методом литья под давлением или эквивалентным дешевым способом. Форма немагнитного объекта должна обеспечивать возможность простого крепления нити, т.е. он может иметь отверстие или зажимной механизм, возможно, даже такой простой, как канавка. Затем немагнитный объект приклеивают к магнитному объекту. В качестве альтернативы он может быть зажат или привинчен к магнитному объекту. Этот способ прост и дешев, но для некоторых применений может потребоваться слишком много дополнительного пространства.
В принципе, все рассмотренные способы крепления нити к магнитному объекту применимы таким же образом к креплению нити к корпусу. Однако, поскольку с материалом корпуса обычно проще работать, способ сквозного отверстия может быть хорошим выбором. Зажатие также является хорошим вариантом. Это может быть дешевле, но может быть сложнее осуществить окончательную герметизацию.
По меньшей мере часть корпуса является гибкой для обеспечения возможности преобразования изменений внешнего давления в изменения механических колебаний магнитного объекта. Предпочтительно корпус содержит отклоняемую мембрану, как схематично и в качестве примера показано на фиг. 1 и 2. Отклонение зависит от давления, приложенного к датчику, и изменяет расстояние между сферами. Уменьшение расстояния приводит к увеличению резонансной частоты, и наоборот. На фиг. 1 и 2 можно увидеть основной принцип работы датчика давления. Увеличение давления отклоняет мембрану 515 и уменьшает расстояние между сферами 507, 508, что приводит к увеличению резонансной частоты. На фиг. 1 и 2 дополнительно показаны корпус 502 и нить 506, с помощью которой магнитная сфера 508 прикреплена к мембране 515. На фиг. 1 давление, действующее на мембрану, и резонансная частота меньше, чем на фиг. 2.
На фиг. 3 показаны конструкции сильфонов, т.е. дополнительные варианты исполнения датчика давления с сильфоном. Сильфон поддается силам, возникающим в результате давления, действующего на датчик, т.е. увеличение давления сжимает сильфон и уменьшает межсферное расстояние. На фиг. 3А показана первая конструкция сильфона. Сильфон 703 предназначен для использования пространства, доступного вокруг нити 706, без увеличения внешнего диаметра датчика, при этом увеличение давления сжимает сильфон 703 и уменьшает расстояние между магнитными сферами 707, 708, что приводит к увеличению резонансной частоты. На фиг. 3А дополнительно показан корпус 702 и неподвижная магнитная сфера 707 датчика 701 давления. Датчик 701 давления дополнительно содержит тонкое металлическое покрытие 717, действующее в качестве диффузионного барьера, т.е. блокирующего диффузию слоя. Следует отметить, что все варианты осуществления настоящего изобретения содержат блокирующий диффузию слой, даже если он явно не показан на всех чертежах по соображениям ясности.
На фиг. 3В показан датчик 801 с покрытием, который аналогичен датчику давления, показанному на фиг. 3А, с дополнительным гладким и мягким чехлом 818 поверх сильфона, чтобы избежать образования сгустков крови. Также датчик 801 содержит сильфон 803, предназначенный для использования пространства, доступного вокруг нити, без увеличения внешнего диаметра датчика, при этом увеличение давления сжимает сильфон 803 и уменьшает расстояние между магнитными сферами 807, 808, что приводит к увеличению резонансной частоты. На фиг. 3В дополнительно показан корпус 802 и неподвижная магнитная сфера 807 датчика 801 давления. Датчик 801 давления дополнительно содержит тонкое металлическое покрытие 817, действующее в качестве диффузионного барьера, т.е. блокирующего диффузию слоя.
На фиг. 3С показан датчик 901 давления, который аналогичен датчику давления, показанному на фиг. 3В, дополнительно с 3-элементным проволочным каркасом 920 для прямой доставки в сосуд. Каркас фиксирует датчик, не перекрывая просвет сосуда. Таким образом, также в этом варианте осуществления гладкий и мягкий чехол 918 присутствует поверх сильфона 903, чтобы избежать образования сгустков крови. Сильфон 903 предназначен для использования пространства, доступного вокруг нити, без увеличения внешнего диаметра датчика, при этом увеличение давления сжимает сильфон 903 и уменьшает расстояние между магнитными сферами 907, 908, что приводит к увеличению резонансной частоты. На фиг. 3С дополнительно показан корпус 902 и неподвижная магнитная сфера 907 датчика 901 давления. Датчик 901 давления дополнительно содержит тонкое металлическое покрытие 917, действующее в качестве диффузионного барьера, т.е. блокирующего диффузию слоя
Сильфон может быть изготовлен различными способами. Во-первых, сильфон может быть изготовлен из довольно гибкого материала, такого как силиконовый каучук (см. Фиг. 4). На самом деле это может быть просто кусок силиконового каучука. На фиг. 4 датчик 1001 давления содержит цилиндрический корпус 1002, имеющий открытые концы, закрытые с помощью каучуковых элементов 1009, 1003, причем первый каучуковый элемент 1009 удерживает неподвижную магнитную сферу 1007, а второй каучуковый элемент 1003 удерживает вращательно-колебательную магнитную сферу 1008 с помощью нити 1006. Цилиндрический каучуковый элемент 1003 действует как компенсатор расширения вместо сильфона.
Однако при включении по меньшей мере одного диффузионно-плотного слоя в сильфон, т.е. при покрытии сильфона блокирующим диффузию слоем, например, как описано выше со ссылкой на фиг. 3А-3С, простая трубка обычно слишком жесткая. Поэтому предпочтительна настоящая сильфонная структура. Сильфоны хорошо известны, и возможны сильфоны различной формы. Особенно хорошо подходит для применения в датчиках давления структура типа "оригами". Существует несколько способов изготовления сильфона. Его можно просто изготовить в процессе литья под давлением. Это имеет то преимущество, что сильфон может быть изготовлен вместе с кожухом за один этап. Однако, поскольку мембрана должна быть очень тонкой, производственный процесс является сложным. Альтернативой является создание только внутреннего свободного пространства сильфона в производственном процессе, таком как литье под давлением или даже процесс токарной обработки или фрезерования. Материал должен быть легко растворимым, как поливиниловый спирт или полистирол. Также подходят некоторые металлы, такие как алюминий, железо или медь. На этот материал наносят сильфонную структуру, а внутреннюю структуру удаляют подходящим растворителем и/или за счет применения тепла. Многие процессы осаждения подходят для создания сильфона. Например, благородный металл (золото, палладий и т.д.) может быть нанесен электрохимически. Металлы, соединения и полимеры могут быть термически осаждены в вакууме. Подходят процессы распыления, а также химическое осаждение из газовой фазы (CVD, от англ. chemical vapor deposition). Многие другие, такие как простая окраска, тоже могут сработать. Хотя сильфон из чистого металла будет работать, лучше всего сочетать металл с полимером, потому что это дает менее жесткий сильфон. Также представляется эффективным встраивание по меньшей мере двух или более очень тонких металлических слоев. Так, например, хорошо сначала осадить (распылить) слой золота-палладия, затем использовать процесс CVD для осаждения парилена С (поли-пара-ксилилена), а затем снова осадить сверху посредством распыления сплав золота. Это позволяет диффузионному барьеру функционировать, даже если в металлическом слое появляется несколько трещин, поскольку газу приходится диффундировать на большое расстояние в париленовом слое, который уже достаточно устойчив к диффузии. Сверху могут или не могут быть предусмотрены дополнительные слои для увеличения биосовместимости, т.е. каждый из описанных вариантов осуществления может содержать один или несколько внешних биосовместимых слоев. Вместо использования внутренней формы также возможно использование внешних форм. Они должны расколоться, чтобы освободить сильфон, но могут быть использованы повторно несколько раз. Способы физического осаждения могут не очень хорошо подходить для этого производственного процесса, но, например, подходят химическое осаждение и электрохимическое осаждение. Другие процессы осаждения, упомянутые выше, могут быть использованы после извлечения (незаконченного) сильфона из формы.
Как описано выше, существует множество способов нанесения покрытия на датчик. Особенно полезно еще раз покрыть конечный датчик металлом, например, как описано выше со ссылкой на фиг. 3А-3С. Это делает все возможные соединения диффузионно плотными. Здесь снова полезны физическое или химическое осаждения из газовой фазы. Поверх этого слоя (или в качестве альтернативы) при необходимости может быть нанесено биосовместимое покрытие, такое как парилен С. В противном случае покрытие из благородного металла или титана уже обеспечивает хорошую биосовместимость.
Как показано на фиг. 3В и 10С, чтобы избежать образования сгустков крови на довольно острых краях сильфона, может быть добавлен гладкий и мягкий верхний слой 818, 918. Пустота между мягким слоем 818, 918 и сильфоном может быть заполнена текучей средой, например водой или силиконовым маслом.
На фиг. 3С показан датчик 901 с 3-элементным проволочным каркасом 920 для прямой доставки в сосуд. Каркас фиксирует датчик, не перекрывая просвет сосуда. Каркас обычно состоит из кольцеобразной или дискообразной центральной части, из которой выступают изогнутые ножки. Он может быть изготовлен из проволочного материала, например нитинола, благодаря его высокой гибкости и хорошей биосовместимости. Другие материалы, такие как нержавеющая сталь или полимеры, также подойдут. Альтернативой проволоке могут быть структуры, вырезанные из листовых материалов, которым затем будет придана изогнутая форма с помощью пресс-формы и термообработки. Также было бы возможно литье под давлением, особенно для полимеров. Для соединения с кожухом датчика кольцеобразная или дискообразная структура действует как интерфейс между каркасом и кожухом датчика. Кольцеобразная структура может быть прорезана на цилиндрическом кожухе и может быть закреплена за счет усилия пружины и/или посредством склеивания или сварки. Дискообразная структура может быть приклеена или приварена к датчику.
Чтобы избежать сил, возникающих в результате контакта со стенкой сосуда, каркас 920 соединяется только с одной частью датчика 901 и защищает пространство вокруг другой части (см. Фиг. 3С). Он может быть соединен либо с частью, содержащей неподвижный магнитный элемент, либо с частью с вращаемым магнитом. Конструкция каркаса может также содержать спиральные структуры (однопроволочные или многопроволочные) или сетчатые структуры. Эти структуры могут быть оптимизированы для сжатия, например, во время трансвенозной доставки через тонкую иглу.
На фиг. 5A-5D показаны схематично и в качестве примера дополнительные варианты осуществления датчика давления. Здесь представлена симметричная конструкция датчика для минимизации связи крутящего момента с окружающей средой. На фиг. 5А и 5В показан симметричный датчик 1101 при низком (фиг. 5А) и высоком (фиг. 5В) давлении. Симметричный датчик 1101 содержит цилиндрический корпус 1102, причем на противоположных концах корпуса 1102 расположены сильфоны 1103, 1104, т.е. торцевые поверхности корпуса 1102 удерживаются сильфонами 1103, 1104. К торцевым поверхностям магнитные сферы 1107, 1108 прикреплены с помощью соответствующих нитей 1105, 1106, причем магнитные сферы, как и в других вариантах осуществления, являются постоянными магнитами. Внешняя поверхность корпуса 1102 снабжена тонким металлическим покрытием 1117, действующим в качестве диффузионного барьера, т.е. внешняя поверхность корпуса 1102 снабжена блокирующим диффузию слоем 1117. На фиг. 5С и 5D показан дополнительный вариант 1201 осуществления, который соответствует варианту 1101 осуществления, но, кроме того, имеет крепление 1220 проволочного каркаса для сохранения расстояния от стенки сосуда. Для окончательной конструкции открытые концы проволоки должны быть соединены, чтобы избежать захвата отдельных проволок структурами сосуда во время доставки по потоку. Таким образом, также в этом варианте осуществления присутствует симметричная конструкция датчика, чтобы минимизировать связь крутящего момента с окружающей средой. На фиг. 5С и 5D показан симметричный датчик 1201 при низком (фиг. 5С) и высоком (фиг. 5D) давлении. Симметричный датчик 1201 содержит цилиндрический корпус 1202, причем на противоположных концах корпуса 1202 расположены сильфоны 1203, 1204, т.е. торцевые поверхности корпуса 1202 удерживаются сильфонами 1203, 1204. К торцевым поверхностям с помощью соответствующих нитей прикреплены магнитные сферы 1207, 1208, причем магнитные сферы, как и в других вариантах осуществления, представляют собой постоянные магниты. Внешняя поверхность корпуса 1202 снабжена тонким металлическим покрытием 1217, действующим в качестве диффузионного барьера, т.е. внешняя поверхность корпуса 1202 снабжена блокирующим диффузию слоем 1217.
Датчики давления, описанные выше, могут быть встроены, например, в проволочный направитель 1310, как схематично и в качестве примера показано на фиг. 6 и 7. Концы проволочного направителя 1310 могут быть приварены к корпусу 1302 датчика 1301 давления с неподвижной магнитной сферой 1307 и вращающейся магнитной сферой 1308, прикрепленной к мембране 1304 с помощью нити 1306. Корпус 1302 содержит по меньшей мере одно отверстие 1303, которое можно рассматривать как вентиляционные отверстия, для обеспечения соединения по текучей среде с областью за пределами корпуса 1302, чтобы обеспечить возможность измерения давления. Размеры, показанные на фиг. 6 и 7 приведены только в качестве примера. Размеры также могут быть разными. Однако показанные размеры подходят для применения датчика давления фракционного резерва кровотока. Применение правил масштабирования к наблюдаемому отношению сигнал / шум демонстрационного образца показывает, что указанные размеры обеспечат достаточное отношение сигнал / шум и точность для дистанционной работы на расстояниях, достаточно больших, чтобы полностью проникнуть в пациента. Таким образом, датчик давления может быть встроен в проволочный направитель, тем самым создавая проволоку сдатчиком давления.
Может оказаться полезным подключить датчики давления к другим имплантируемым устройствам (см. Фиг. 8), например, для отслеживания падения давления на стенте 1401. Это может быть полезно для характеризации профилей давления внутри и вокруг стентов, например, для детектирования закупорки или для отслеживания прогрессирования заболевания. На фиг. 8 показана встраивание в стент датчика 1403 давления с реалистичной шкалой размеров (длина стента = 30 мм, диаметр стента = 4 мм, диаметр проволоки = 0,2 мм, длина датчика = 1,2 мм, диаметр датчика = 0,5 мм), причем на фиг. 8А показаны два датчика 1403 на входе и выходе стента 1402, которые могут использоваться для отслеживания падения давления на стенте 1402 и, следовательно, возможной закупорки. На фиг. 8В показано, что неподвижная часть датчика 1403 должна быть соединена с проволочной рамкой 1402. Можно добавить покрывающий материал, чтобы придать датчику более обтекаемую форму для лучшего встраивания в стент (не показан). На фиг. 8С показан вид внутрь стента 1402. Подвижную сенсорную часть можно слегка наклонить внутрь сосуда, чтобы избежать или задержать разрастание ткани.
Области применения - это коронарные стенты, агенты при аневризмах (мониторинг давления может помочь обнаружить эндоподтекание), трансяремные внутрипеченочные портосистемные шунты (TIPS, от англ. transjugular intrahepatic portosystemic shunt) или стенты, используемые при заболеваниях периферических сосудов. Как и выше, кольцеобразная или дискообразная структура может действовать в качестве интерфейса между устройством и датчиком со всеми вариантами крепления, упомянутыми выше. Аналогичное крепление может быть применено к другим внутренним устройствам, например, к проволочным намоткам, шунтирующим трансплантатам или трансмуральным устройствам Амплатцер (англ. Amplatzer). Для более крупных устройств, таких как проволочные на правители, проводники сдатчиком давления ФРК (фракционный резерв кровотока, или FFR, от англ. fractional flow reserve), катетеры, большие шунтирующие трансплантаты или искусственные сердечные клапаны, в устройстве можно просверлить отверстие для размещения датчика. Внутри отверстия опять же прикреплена только одна сторона датчика, например, посредством клея или зажима, в то время как другая сторона может свободно перемещаться, например, в текучей среде или непосредственно в крови. Текучая среда может быть либо несмешивающегося типа, например силиконовое масло или перфорированные поливинилэфиры, либо она может быть отделена от крови дополнительной тонкой и гибкой мембраной, либо возможны оба варианта.
Во всех клинических применениях используется тот факт, что датчик является пассивным и имеет малые размеры. Он может быть помещен внутрь человеческого тела, в то время как система считывания может детектировать его беспроводным образом без контакта с телом и на расстоянии. Для большинства применений клинического мониторинга датчик должен оставаться стабильным в организме человека в течение нескольких месяцев или нескольких лет. Однако для проволочных направителей и катетеров стабильность должна быть обеспечена только в течение нескольких часов. Для датчика, введенного трансвенозным образом, также может быть достаточной стабильность в течение нескольких недель, поскольку периодически могут поставляться новые датчики.
На фиг. 9 схематично и в качестве примера показан вариант осуществления сердечного клапана 2000, объединенного со стентом, причем на фиг. 9 материал стента обозначен ссылочным обозначением 2011. Сердечный клапан 2000 содержит клапанную структуру 2001 с неподвижной частью 2002 и подвижной частью 2004. Сердечный клапан 2000 содержит датчики давления в соответствии с описанными вариантами осуществления. Первый датчик 2020 давления расположен на стороне низкого давления неподвижной части 2002 клапана 2000. Кроме того, второй датчик давления 2008 расположен на подвижной части 2004 клапана 2000. Эти два датчика давления прикреплены к внешним стенкам клапана 2000. Однако датчики давления также могут быть встроены в клапанную структуру, причем в этом случае внутри клапанной структуры имеется пространство, закрытое мембраной и заполненное текучей средой, причем соответствующий датчик давления расположен в этом пространстве. Через мембрану и текучую среду внешнее давление приводит к изменению давления в положении соответствующего датчика давления внутри соответствующей полости. На фиг. 9 третий датчик 2007 давления расположен в полости 2005, закрытой мембраной 2003, на стороне низкого давления внутри неподвижной части клапана 2000. Четвертый датчик 2010 давления расположен в пространстве внутри подвижной части 2004 клапана 2000, причем это пространство также заполнено текучей средой и закрыто мембраной 2021. Дополнительный датчик 2009 давления может быть размещен в полости 2006 неподвижной части клапанной структуры на стороне высокого давления, причем также в этом случае полость заполнена текучей средой и закрыта мембраной 2014.
На фиг. 10 схематично и в качестве примера показан вариант осуществления проволоки для лечения аневризмы головного мозга. Проволока 2100 содержит датчики давления в соответствии с описанными вариантами осуществления. В частности, первый датчик 2104 давления может быть расположен на первом конце проволоки 2100 с одной стороны этого первого конца. Кроме того, дополнительный датчик 2101 давления может быть прикреплен ко второму концу проволоки 2100, и на промежуточном участке проволоки 2100 может быть установлен дополнительный датчик 2103 давления, при этом проволока 2100 может содержать внутреннюю полость, в которой расположен датчик 2103 давления, при этом внутренняя полость имеет соединение по текучей среде с областью за пределами проволоки 2100 через отверстия 2102.
На фиг. 11 схематично и в качестве примера показан вариант осуществления печеночного шунтирующего устройства 2200, содержащего проволочную структуру 2203. В этом варианте осуществления проволочная структура 2203 имеет первую часть 2201, окруженную облицовочным материалом, и оголенную вторую часть 2202. В этом варианте осуществления первая часть 2201 облицована с использованием ПТФЭ (политетрафторэтилена). Более того, в этом варианте осуществления первая часть 2201 проволочной структуры имеет отдельные проволоки, тогда как во второй части 2202 проволочной структуры 2203 проволоки переплетены. Печеночное шунтирующее устройство 2200, которое также можно просто назвать печеночным шунтом, содержит несколько датчиков давления. Например, первый датчик 2204 давления расположен рядом с соответствующей проволокой первой части 2201 проволочной структуры 2203 внутри трубки из ПТФЭ. Второй датчик 2205 давления расположен "в проволоке" внутри трубки из ПТФЭ, т.е. датчик 2205 давления расположен между двумя концами соответствующей проволоки проволочной структуры 2203. Третий датчик 2206 давления расположен между двумя соседними проволоками проволочной структуры 2203 внутри трубки из ПТФЭ и также соединен с этими проволоками. Проволоки проволочной структуры 2203 имеют волнообразную форму, при этом между пиками или провалами соответствующей формы волны расположен дополнительный датчик 2207 давления, при этом датчик давления, например, может быть соединен с двумя соседними пиками или провалами соответствующей формы волны.
На фиг. 11 показан дополнительный датчик 2208 давления рядом с проволокой проволочной структуры 2203 внутри трубки из ПТФЭ. Также оголенная часть 2202 проволочной структуры 2203 может содержать датчики давления. Например, датчик 2209 давления может быть расположен между двумя соседними переплетенными проволоками и соединен с этими соседними переплетенными проволоками. Дополнительный датчик 2210 давления может быть расположен рядом с проволокой, а датчик 2211 давления может быть расположен между двумя пиками или провалами формы волны соответствующей проволоки проволочной структуры 2203 и соединен с ними.
Следует отметить, что на фиг. 8-11 расположение датчиков давления приведено только в качестве примера, т.е. также большее или меньшее количество датчиков давления может быть расположено в том же или других положениях на соответствующем устройстве или внутри него. Также возможно, что соответствующее устройство содержит только один датчик давления. Один или несколько датчиков давления соответствующего устройства являются датчиками давления в соответствии по меньшей мере с одним из описанных вариантов осуществления.
В дальнейшем предполагается, что длина датчика всегда примерно в два раза больше диаметра. Все датчики диаметром 0,3 мм и более позволят отслеживать давление в режиме реального времени (более 10 показаний в секунду) на расстоянии более 30 см с погрешностью давления менее 1 мбар и диапазоном давления не менее 400 мбар. Эти параметры позволяют измерять артериальное давление с клинически значимой точностью.
Датчик может быть встроен, например, в проволочный направитель, как объяснено выше со ссылкой на фиг. 6 и 7. Типичные диаметры проволочных направителей варьируются от 0,33 до 1,0 мм, т.е. для тонкой проволоки с датчиками давления диаметр датчика должен быть около 0,3 мм или меньше. Таким образом, был бы возможен диаметр сферы 0,25 мм, что привело бы к приведенным выше оценкам частоты, отношения сигнал / шум и добротности. Теоретически достижимого отношения сигнал / шум ~ 1000 на расстоянии 30 см было бы достаточно для всех ситуаций считывания. При больших диаметрах проволоки можно использовать сферы большего размера, что снижает потребность в оптимальном подавлении фона. Таким образом, диаметры датчиков от 0,3 до 1,0 мм полезны для встраивания в проволочные направители.
Датчик также может быть встроен в катетер. Здесь, при размещении датчика в просвете катетера, применяется тот же аргумент, что и для проволочного направителя. Может потребоваться разместить датчики в материале стенки катетера, что приведет к более жестким ограничениям по размеру. Возможно, будет целесообразно создать датчик с диаметром сферы 0,1 мм, но возрастут усилия по удалению фонового сигнала, и/или будет уменьшено расстояние, на котором датчик может быть надежно считан. В качестве альтернативы, усреднение, синхронизированное с сердечным ритмом, может быть использовано для улучшения отношения сигнал / шум, однако за счет разрешения по времени. Таким образом, диаметры датчиков от 0,1 до 1,0 мм полезны для встраивания в катетер.
Датчик также может быть размещен на стенте. Чтобы свести к минимуму влияние на кровоток через стент, диаметр датчика не должен быть намного больше диаметра проволоки. Типичный диаметр проволоки стента составляет от 0,2 до 0,5 мм. Таким образом, это был бы полезный диапазон для диаметров датчиков. Однако также может быть встроен датчик большего размера, опционально с дополнительным обтекаемым чехлом.
Также возможно вводить датчик с помощью шприца, при этом датчик может быть вставлен в сосуд меньшего размера в области легких или печени без риска для пациента. Типичный диаметр датчика для введения составляет от 0,3 до 1,0 мм. Размер каркаса необходимо адаптировать под диаметр сосуда, в котором должен быть установлен датчик оптимальным образом. Предпочтительно диаметр каркаса должен быть больше 1 мм, поскольку в сосудах меньшего размера давление может отклоняться от требуемого давления, присутствующего в более крупном питающем сосуде. Чтобы упростить доставку через иглу в венозную систему, каркас должен быть сжимаемым в радиальном направлении до диаметра кожуха датчика.
Поскольку датчик давления содержит магнитный объект, подобный постоянному магниту, может возникнуть проблема при сканировании тела с помощью сканера МРТ. Проблема может не представлять опасности для организма, т.е. для пациента, поскольку датчик давления мал и, следовательно, вызывает лишь небольшие усилия и крутящие моменты, которые не представляют угрозы для пациентов. Аналогичным образом, магнитно-резонансное изображение, полученное с помощью сканера МРТ, также не может быть испорчено, поскольку датчик давления имеет очень малые размеры. Однако во многих клинических сканерах МРТ используют высокую напряженность поля более 1,5 Тл, и сильное магнитное поле может разрушить датчик давления, изменив намагниченность магнитного объекта или повредив механическую конструкцию в датчике давления. Это будет описано более подробно со ссылкой на фиг. 12 и 13.
На фиг. 12 схематично и в качестве примера показан датчик 1 давления без защиты от поля магнитно-резонансной томографии. Датчик 1 давления имеет две магнитные сферы 7, 8, подвешенные с помощью соответствующей нити 5, 6, которая прикреплена к корпусу 2 в соответствующих точках 3, 4 крепления. При возбуждении колеблющимся внешним магнитным полем сферы 7, 8 начинают встречное вращательное колебание вокруг оси нити. Это резонансное колебание создает поле, которое может быть зарегистрировано на расстоянии. Корпус 2 является частично гибким, так что расстояние между двумя сферами 7, 8 и, следовательно, резонансная частота изменяются в зависимости от внешнего давления. Гибкая часть корпуса 2 не выделена на фиг. 12 по соображениям наглядности.
На фиг. 13 датчик 1 давления с фиг. 12 помещен в сильное магнитное поле в осевом направлении 9. Это заставляет сферы 7, 8 ориентироваться в направлении магнитного поля. Однако в этой реализации нити 5, 6 слишком короткие, чтобы полностью выровнять сферы 7, 8. Если корпус 2 датчика не может двигаться, либо нити 5, 6 обрываются, либо, учитывая очень сильное магнитное поле высокопольных сканеров МРТ, сферы 7, 8 меняют направление намагничивания, делая устройство 1 неработоспособным.
Одним из решений этой проблемы является размещение корпуса датчика давления во внешнем вмещающем корпусе 10, 110, который предпочтительно представляет собой сферический или эллипсоидальный кожух, например, заполненный высоковязкой текучей средой, так что весь корпус со сферами может переориентироваться для выравнивания намагниченности сфер с внешним полем и, таким образом, избежать повторного намагничивания. Сферический внешний корпус 110 допускает произвольную переориентацию датчика и, таким образом, может также использоваться для более простой конструкции датчика с одной неподвижной сферой 107 и другой сферой 108, колеблющейся на нити 106, как схематично показано на фиг. 14. На фиг. 14 датчик 111 давления сформирован с использованием более простого магнитомеханического генератора 101 колебаний (осциллятора), который содержит корпус 102, содержащий неподвижную сферу 107 и другую сферу 108, колеблющуюся на нити 106, внутри сферического внешнего кожуха 110. Для конструкции, показанной на фиг. 13, в зависимости от длины нитей 5, 6, было бы достаточно частичной переориентации датчика 1, и внешний кожух 10 мог бы быть более эллипсоидальным, т.е. мог бы быть выполнен меньшим в одном или двух направлениях, как схематично показано на фиг. 15, на которой датчик давления обозначен ссылочным обозначением 11.
Датчик давления выполнен таким образом, что изменения внешнего давления за пределами охватывающего кожуха преобразуются в изменения внешнего давления, происходящие снаружи корпуса и внутри охватывающего кожуха. Например, внешний кожух может представлять собой очень мягкий кожух, заполненный текучей средой, или кожух с отверстиями, чтобы эффективно преобразовывать изменения внешнего давления в изменения механических колебаний магнитного объекта.
Дополнительный кожух 10, 110 обеспечивает возможность переориентации корпуса 2, 102 для выравнивания намагниченности сферы с внешним полем, при этом на фиг. 14 показан сферический кожух 10, обеспечивающий свободную переориентацию датчика и, следовательно, также подходящий для конструкций, например, с неподвижной магнитной сферой, и при этом на фиг. 15 требуемый наклон возможен в корпусе 110, который сплющен в одном или двух направлениях, т.е. имеет меньший диаметр, чем сфера 10 на фиг. 14. Эллиптический корпус 110 особенно удобен для датчиков с двумя сферами 7, 8, подвешенными на нитях 5, 6.
На фиг. 16 датчик 201 давления с нитями 205, 206 удлинен по сравнению с датчиком 1 давления, показанным на фиг. 12 и 13, тогда как диаметр трубки остается постоянным. Таким образом, для сфер 207, 208 достаточно места для выравнивания с внешним магнитным полем произвольного направления. Минимальная длина струны равна Пи/4 диаметра сферы 207, 208. Единственная проблема, которая может возникнуть, заключается в том, что поле изменялось так, чтобы намотать нить 205, 206 вокруг сферы (сфер) 207, 208. Чтобы сделать это маловероятным, сферы 207, 208 и внутренняя часть корпуса 202 могут быть покрыты скользким и нелипким материалом, таким как графит. Нити 205, 206 прикреплены к корпусу 202 в точках 203, 204 крепления.
На фиг. 17, на котором схематично и в качестве примера показан другой вариант осуществления, нити 305, 306 датчика 301 давления сами по себе слишком короткие, чтобы сделать устройство устойчивым к магнитно-резонансной томографии. Однако к соответствующей нити 305, 306 и к корпусу 302 прикреплен соответствующий блок 314, 315 намотки. Если силы, действующие на соответствующую нить 305, 306, становятся слишком большими, этот блок 314, 315 высвобождает большую длину нити 305, 306. Следовательно, соответствующая сфера 307, 308 может свободно вращаться, и проблема решена. Для нормальной работы за пределами поля аппарата МРТ необходимо точно определить длину нити 305, 306. Это осуществляют с помощью стопора 311, 312, который может быть прикреплен к нити 305, 306, или с помощью какого-либо стопора в блоке намотки.
На фиг. 18 показан один возможный блок 414 намотки. Он содержит пружинящий материал 422, который удерживает нить 405 посредством шкива 427 и точки 426 крепления. Когда усилие на нити 405 низкое, пружина 422 останавливается некоторыми из стопоров 424, 425. Пружина 422 давит на стопоры 424, 425, и, следовательно, длина нити 405 фиксирована. Если усилие становится больше, материал 422 пружины изгибается и доступная длина внутри корпуса 420 увеличивается. Эта конструкция предпочтительно допускает удлинение нити до 1,5 радиусов сфер. Это означает, что этого достаточно независимо от длины нити внутри корпуса 420. Нить 405 направляется из корпуса 420 в корпус измерительного (чувствительного) устройства через отверстие 421 корпуса. Пружина прикреплена к корпусу 420 в точке 423 крепления пружины.
Описанные датчики давления предпочтительно выполнены с возможностью компенсации зависимости резонансной частоты от температуры. Эта конфигурация датчиков давления для компенсации температурных сдвигов резонансной частоты будет описана ниже со ссылкой на фиг. 19.
Также на фиг. 19 датчик 3001 давления содержит корпус 3002 и магнитный объект 3004, расположенный внутри корпуса 3002 таким образом, что он может поворачиваться за пределы равновесной ориентации, если на магнитный объект 3004 действует внешний магнитный момент. Датчик 3001 давления дополнительно содержит блок 3003 восстановления крутящего момента, выполненный с возможностью обеспечения восстанавливающего крутящего момента, чтобы вернуть магнитный объект 3004 в равновесную ориентацию, если внешняя магнитная сила повернула магнитный объект 3004 из равновесной ориентации, чтобы обеспечить возможность вращательного колебания магнитного объекта 3004, возбуждаемого внешним магнитным моментом. В этом варианте осуществления корпус 3002 является цилиндрическим, а магнитный объект 3004 может вращаться вокруг воображаемой оси вращения, проходящей по центру магнитного объекта 3004, при этом магнитный объект 3004 является вращательно-симметричным относительно воображаемой оси вращения. В частности, в этом варианте осуществления магнитный объект 3004 представляет собой магнитную сферу.
Блок 3003 восстановления крутящего момента содержит дополнительный магнитный объект 3003 для обеспечения восстанавливающего крутящего момента. В частности, магнитный объект 3004 прикреплен к одному концу нити 3007, при этом другой конец нити 3007 прикреплен к корпусу 3002. Нить 3007 выполнена с возможностью предотвращения соприкосновения магнитного объекта 3004 с дополнительным магнитным объектом 3003 из-за их магнитного притяжения и обеспечения возможности вращательного колебания магнитного объекта 3004. В этом варианте осуществления дополнительный магнитный объект 3003 неподвижно прикреплен к корпусу 3002 с помощью клея 3009.
Магнитный объект 3004 образует первый магнитный диполь, дополнительный магнитный объект 3003 образует второй магнитный диполь, причем магнитный объект 3004 и дополнительный магнитный 3003 расположены так, что в равновесной ориентации первый и второй диполи направлены в противоположном направлении. Первый магнитный объект 3004 и второй магнитный объект 3003 представляют собой постоянные магниты, причем в равновесной ориентации северный полюс магнитного объекта 3004 обращен к южному полюсу дополнительного магнитного объекта 3003, и наоборот.
Корпус 3002 является цилиндрическим, причем цилиндрический корпус 3002 содержит две торцевые поверхности 3030, 3031, и при этом дополнительный магнитный объект 3003 неподвижно прикреплен к первой торцевой поверхности 3030, а конец нити 3007, который противоположен концу, прикрепленному к магнитному объекту 3004, прикреплен ко второй торцевой поверхности 3031 цилиндрического корпуса 3002.
В этом варианте осуществления вторая торцевая поверхность 3031 корпуса 3002 образована гибкой частью 3008 стенки корпуса 3002, причем магнитный объект 3004 прикреплен к гибкой части 3008 с помощью нити 3007 таким образом, что внешнее давление, действующее на гибкую часть 3008 снаружи корпуса 3002, приводит к изменению расстояния между магнитным объектом 3004 и дополнительным магнитным объектом 3003. Из-за этого изменения расстояния, вызванного внешним давлением, изменяется напряженность магнитного поля, создаваемого дополнительным магнитным объектом 3003 в положении магнитного объекта 3004, и, следовательно, изменяется резонансная частота. Таким образом, резонансная частота изменяется в зависимости от внешнего давления таким образом, что датчик 3001 давления может использоваться для измерения внешнего давления в качестве другой физической величины. Таким образом, гибкая часть 3008 стенки корпуса 3002 может рассматриваться как измерительный элемент, который выполнен с возможностью изменения резонансной частоты в зависимости от внешнего давления.
Датчик 3001 давления дополнительно содержит магнитный материал 3005, 3006, расположенный рядом с дополнительным магнитным объектом 3003. Этот магнитный материал 3005, 3006 влияет на магнитное поле, создаваемое дополнительным магнитным объектом 3003, при этом влияние магнитного материала 3005, 3006 зависит от температуры для изменения напряженности магнитного поля в положении магнитного объекта 3004 и, следовательно, для изменения резонансной частоты, если температура изменяется. Магнитный материал 3005, 3006 выполнен таким образом, что его намагниченность уменьшается с повышением температуры. Более того, магнитный материал 3006 выполнен таким образом, что его направление намагничивания противоположно направлению намагничивания дополнительного магнитного объекта 3003, а магнитный материал 3005 выполнен таким образом, что его направление намагничивания и направление намагничивания дополнительного магнитного объекта 3003 совпадают. Магнитные материалы 3005, 3006, которые являются магнитно-мягкими материалами, следовательно, влияют на резонансную частоту в зависимости от температуры в противоположных частотных направлениях, т.е. один из этих магнитных материалов приводит к изменению в сторону более высоких частот в зависимости от повышения температуры, а другой из этих магнитных материалов приводит к изменению в сторону более низких частот с повышением температуры.
Датчик давления предпочтительно выполнен таким образом, что резонансная частота не зависит от температуры. Однако, например, гибкая часть 3008 стенки корпуса, которая может быть образована мембраной, может иметь зависящую от температуры гибкость, так что резонансная частота может в целом также зависеть от температуры. Также другие части датчика давления могут зависеть от температуры, причем эта зависимость также может влиять на резонансную частоту. Чтобы компенсировать этот нежелательный, зависящий от температуры сдвиг частоты, магнитные материалы 3005, 3006 могут быть выполнены такими, чтобы они обеспечивали тот же сдвиг частоты в противоположном частотном направлении в зависимости от изменения температуры. В частности, магнитные материалы 3005, 3006 могут быть выбраны и расположены таким образом, чтобы устранялась любая температурная зависимость резонансной частоты датчика 3001 давления. Также возможно, что только один из магнитных материалов, т.е. только магнитный материал, уменьшающий резонансную частоту с повышением температуры, или только материал, увеличивающий резонансную частоту с повышением температуры, используется для уменьшения или даже устранения температурной зависимости резонансной частоты датчика 3001 давления. Один или оба магнитных материала 3005, 3006 можно рассматривать как компенсационные элементы для компенсации вызванного температурой сдвига резонансной частоты.
Фиг. 20 схематично и в качестве примера иллюстрирует систему 1501 детектирования для детектирования резонансной частоты соответствующего датчика, для считывания показаний соответствующего датчика, т.е. систему считывания для беспроводного считывания показаний соответствующего датчика давления. На фиг. 21 показан в качестве примера прототип системы 1501 детектирования. Система 1501 детектирования содержит, главным образом, по меньшей мере один генератор магнитных полей и по меньшей мере один датчик магнитных полей, т.е. преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцированными колебаниями магнитного объекта датчика давления, в электрические сигналы отклика. Полоса рабочих частот находится в диапазоне низких кГц и должна быть достаточно широкой, чтобы охватывать отклики нескольких датчиков, работающих параллельно на разных частотах, и, возможно, также высшие гармоники резонансной частоты датчика, например, для улучшения отношения сигнал / шум. Амплитуды поля передачи составляют максимум несколько миллитесла, тогда как амплитуды поля, подлежащие детектированию, составляют от 1/10 нТл до нескольких нТл. Могут применяться множество различных генераторов поля (колеблющиеся постоянные магниты, катушки с сердечниками / без сердечников, магнитострикционные модуляторы поля, …), а также множество различных магнитометров (основанные на эффект Холла, магниторезистивные датчики различных видов, магниторезонансные датчики, сверхпроводящие магнитометры (SQUID, от англ. superconducting quantum interference device) и т.д.). Технически самыми простыми системами являются проводящие петли без сердечника для передачи и приема магнитных полей. Катушки, как правило, достаточно хороши для применения в датчиках. Катушка для генерации магнитного поля может также использоваться для приема магнитного поля. Однако для этих задач можно использовать разные катушки, что дает некоторое преимущество. На фиг. 20 и 21 показана система детектирования, представляющая собой одноканальную приемо-передающую систему, причем множество каналов могут работать параллельно для получения пространственной информации.
На фиг. 20 система 1501 детектирования содержит передающую катушку 1503, которая подключена к микроконтроллеру 1507 через цифро-аналоговый преобразователь 1506 (ЦАП) и аудиоусилитель 1502 для генерации внешнего магнитного момента для датчика 1520 давления, который может быть любым из описанных датчиков давления. Приемная катушка 1504 также подключена к микроконтроллеру 1507 через усилитель 1505 с низким уровнем шума и аналого-цифровой преобразователь 1508 (АЦП) для считывания резонансной частоты. Микроконтроллер 1507 соединен с дисплейным компьютером 1509. Микроконтроллер 1507 выполнен, например, с возможностью генерации и приема сигналов, оценки и управления частотой и, опционально, измерения эталонного давления. На фиг. 21 также показано устройство развязки передачи / приема.
Микроконтроллер 1507 генерирует импульсы передачи (см. верхнюю линию 1350 на фиг. 22), которые усиливаются с помощью аудиоусилителя 1502 и затем передаются на передающую катушку 1503, которую также можно назвать катушкой возбуждения. В этой реализации используется отдельная приемная катушка 1504, которая развязана с передающей катушкой 1503 посредством двух дополнительных развязывающих катушек 1510, которые не показаны на фиг. 20 по соображениям ясности. Принимаемый сигнал подается в усилитель 1505 с низким уровнем шума и передается в АЦП 1508 микроконтроллера 1507, где временная кривая, обычно составляющая 1/20 секунды, дискретизируется со скоростью около 20 квыб./с. На фиг. 22 показано, помимо импульсов 1350 передачи, которые также можно назвать импульсами возбуждения, индуцированное напряжение 1351 в приемной катушке 1504 из-за колебания сферы в датчике и, следовательно, из-за отклика датчика. Интервал между импульсами 1350 возбуждения может непрерывно регулироваться микроконтроллером 1507.
Ниже будут рассмотрены преимущества системы с несколькими катушками. В системе с одной катушкой относительная ориентация датчика относительно катушки может быть такой, что катушка не может управлять колебаниями магнитной сферы, а также не может считывать изменение генерируемого поля. Таким образом, чтобы пользователю избежать необходимости переориентирования системы считывания относительно датчика, может быть желательна система с несколькими катушками. Катушки должны иметь различное распределение пространственной чувствительности, чтобы иметь возможность генерировать оптимальный вектор поля возбуждения во всех ситуациях. Использование нескольких катушек, кроме того, позволяет локализовать датчик путем определения положения и ориентации колеблющегося магнитного диполя в пространстве. Различные амплитуды принимаемых сигналов вместе с известными чувствительностями катушечных элементов могут быть согласованы с дипольной моделью для определения параметров положения и ориентации. Пример системы с несколькими катушками для реализации в подушке или матрасе показан на фиг. 23. При наличии множества доступных приемных катушек и каналов дополнительная информация также может быть использована для улучшения подавления фонового сигнала, как описано ниже.
На фиг. 23 несколько катушек 1652 образуют массив из нескольких катушек, который встроен в матрас 1651 кровати пациента системы 1650 визуализации, подобной системе с С-дугой. Катушки 1652 преимущественно представляют собой алюминиевые катушки с поглощением рентгеновского излучения менее 10 процентов. Поэтому не требуется увеличивать дозу для пациента, если используются катушки 1652.
Ниже передающая система на основе катушки системы детектирования будет описана в качестве примера более подробно. Передающая система на основе катушки содержит усилитель передачи и передающую катушку. Опционально также имеется согласующая схема и "заглушающая" схема. Поскольку форма передаваемого сигнала не очень критична при применении датчика, для этой задачи подходит множество усилителей (класса А, класса В, класса АВ, класса D и т.д., в которых используются транзисторы, вакуумные трубки, тиристоры и многие другие компоненты). Поскольку качество сигнала не является критичным, можно выбрать топологию усилителя с наименьшими потерями, которая представляет собой полумостовой или полномостовой усилитель, использующий переключатели с низким сопротивлением включения. Предпочтительными переключателями являются транзисторы типа MOSFET или IGBT. Согласующая схема в простейшем случае представляет собой простой конденсатор, последовательно подключенный к катушке индуктивности. При условии, что усилитель работает с достаточным напряжением питания, такой согласующий конденсатор может быть опущен или емкость может быть выбрана настолько высокой, чтобы резонансная частота катушки с конденсатором была значительно ниже рабочей частоты. Согласующая схема представляет интерес по другой причине. Медицинское оборудование всегда должно работать безопасным образом, поэтому представляет интерес снижение напряжения. Размещая конденсатор в середине катушки так, чтобы ток протекал через одну секцию катушки, затем через согласующий конденсатор, а затем во вторую секцию катушки, можно уменьшить пиковые перепады напряжения. Это еще более верно, если катушка разделена на несколько секций, каждая из которых соединена с соответствующим конденсатором. Это превращает катушку и согласующую схему в объединенный блок. Амплитудой поля удобно управлять с помощью широтно-импульсной модуляции, т.е. усилитель увеличивает / уменьшает ток через катушку только на долю цикла или быстро переключается между увеличением/уменьшением тока. Поскольку точная форма сигнала менее важна для применения датчика, ее лучше всего достичь, изменив состояние только 2 раза в течение полуволны (или 1 раз в случае полной мощности, когда длина импульса идентична длине полуволны). В идеале усилитель должен иметь возможность не только увеличивать или уменьшать ток, но и поддерживать его более или менее постоянным или на уровне, требуемом согласующей схемой. Это достигается правильной последовательностью переключения транзисторов в полумостовой или полномостовой схеме. Как правило, напряжение питания усилителя должно быть довольно низким и находиться в диапазоне ниже 50 В. Кроме того, согласующая схема должна быть настроена таким образом, чтобы не превышать этот предел в 50 В в любых двух точках. В обоих случаях даже лучше не превышать 24 В. Это означает, что количество витков должно быть минимальным. Однако пиковые рабочие токи должны превышать 10 А, лучше 100 А.
Ниже будет описана изоляция передачи / приема. Важно, чтобы не слишком много шума от передающей системы, т.е. от генератора поля, поступало в приемную систему, т.е. в преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика, в то время как передающая система не находится в режиме передачи, т.е. поле возбуждения не генерируется. Кроме того, усилитель передачи не должен закорачивать принимаемый сигнал или даже частично уменьшать его. Для достижения этой цели существует несколько возможностей. Если у нас разные передающая и приемная катушки, то указанные две катушки могут быть развязаны геометрически (см. Фиг. 24).
На фиг. 24 показана реализация конструкции градиентометрической приемной катушки для подавления передаваемого и фонового сигнала в приемном тракте. Здесь были выбраны большие катушки 1452, которые позволили считывать показания датчика на расстоянии около 30 см над верхней катушкой. В градиентометрической конструкции используется способ геометрической развязки: петли 1451 передающей катушки соединены для создания параллельных полей, тогда как петли 1450 приемной катушки соединены для приема градиентов поля и подавления однородных полей. Эта приемо-передающая система обеспечивает внутреннюю геометрическую развязку за счет использования параллельных передающих петель и антипараллельных приемных петель, причем это может быть названо градиентометрической конфигурацией. Это приводит к внутренней геометрической связи. Эта система с катушками без сердечника отличается высокой линейностью. На фиг. 24 также показан блокиратор 1455 постоянного тока с аудиоусилителем 1454 и фильтром 1453 передачи нижних частот. Нижняя часть фиг. 24 иллюстрирует внешние витки приемной катушки 1450 и внутренние витки передающей катушки 1451.
В частности, на фиг. 24 нижнее левое изображение представляет собой крупный план средней части верхнего узла катушек. На нижнем левом изображении видно, что на самом деле только 1 виток передающей катушки 1451 выглядывает снизу. Остальное скрыто приемной катушкой, намотанной с помощью гораздо более тонкой проволоки. Схема 1455 блокировки постоянного тока используется просто для предварительного формирования сигнала перед аудиоусилителем, поскольку сигнал для аудиоусилителя может генерироваться простым ШИМ-выходом. Фильтр 1553 нижних частот представляет собой фильтр между выходом аудиоусилителя 1454 и передающей катушкой 1451. У него есть две цели. Во-первых, он позволяет избежать введения высокочастотного шума, во-вторых, позволяет объединить два выходных канала аудиоусилителя в один.
Геометрическая развязка не всегда возможна, особенно если используется массив передатчиков и приемников. В этом случае может быть введен трансформатор с выводами, подключенными как к схеме передачи, так и к схеме приема. Этот трансформатор обеспечивает развязку приемо-передающей системы. Это трансформаторное решение можно использовать даже в том случае, если используется объединенная передающая / приемная катушка. Трансформатор может быть заменен емкостной (или даже резистивной) развязывающей сетью как с объединенной, так и с отдельными передающей / приемной катушками. Недостатком способов компенсации является то, что они требуют довольно большого пространства, увеличивают шум и в случае емкостной развязки сужают частотный диапазон работы системы детектирования. Более надежным и дешевым решением является добавление схемы, которая полностью заглушает усилитель передачи во время приема. Для этого на выход усилителя могут быть добавлены антипараллельные диоды. Особенно полезны диоды с низкой емкостью при нулевом напряжении, такие как PIN-диоды. Это обеспечивает высокий импеданс при отсутствии тока. Для дальнейшего усиления этого на выходе усилителя может быть установлен электронный переключатель, закорачивающий все остаточные сигналы шума во время приема. Диоды по-прежнему обеспечивают требуемый высокий импеданс. Также возможно сконструировать специальный усилитель, который полностью бесшумен и обеспечивает высокий импеданс в нерабочем состоянии. С помощью полумостовой и полномостовой конструкций это может быть достигнуто за счет абсолютного отсутствия переключения в любом компоненте во время приема, использования транзисторов с низкой выходной емкостью, наличия примерно половины напряжения питания на выходе (выходах) в режиме приема, отсутствия шума от входных разъемов (оптическая изоляция) и наличия напряжения питания с высокой степенью фильтрации (сильная фильтрация или отсутствие переключения источника питания во время приема).
Ниже обсуждается приемная система на основе катушки системы детектирования. Усилитель приема должен быть малошумящего типа. Однако требования не настолько высоки, чтобы требовалось использовать необычные приемные транзисторы. Стандартные малошумящие биполярные или кремниевые транзисторы JFET обычно достаточно хороши. Единственные особые характеристики заключаются в том, что усилитель должен выдерживать импульсы передачи и начинает работать вскоре после импульса передачи. Есть несколько способов достичь этой цели. В случае развязанных передающей / приемной систем (включая объединенную передающую / приемную катушку с развязывающей сетью), усилитель приема не нуждается в особых характеристиках для достижения этой цели. Если развязка отсутствует, усилитель может быть настроен на импульс передачи. Это можно сделать, добавив подходящий конденсатор на вход усилителя и антипараллельные диоды на втором выводе. Это обеспечивает подходящий высокий импеданс в случае передачи и закорачивает все на высокие напряжения до безвредных уровней для усилителя. Естественно, добавленный конденсатор должен быть рассчитан на максимальное напряжение передачи. Значение емкости должно быть настолько высоким, чтобы сигнал на усилителе не слишком сильно уменьшался в случае приема. Для усилителя на базе JFET это, как правило, не является критичным. Антипараллельные диоды могут быть дополнены или заменены подходящим электронным переключателем, таким как оптрон с транзисторным (MOSFET) выходом. Это дает преимущество для дальнейшего снижения входного напряжения. Если все сделано правильно, усилитель приема не будет насыщен и будет функционировать сразу после того, как передаваемый сигнал достаточно ослабнет.
Ниже будет более подробно рассмотрен интерфейс для цифровой системы, причем сначала описывается вывод и обработка цифрового сигнала. Хотя аналоговая система таймера может генерировать выходные сигналы, обычно используется цифровая система, такая как цифровой сигнальный процессор (DSP, от англ. digital signal processor) или программируемая пользователем вентильная матрица (FPGA, от англ. field programmable gate array). В зависимости от типа выходного усилителя могут использоваться различные выходы. Для аналогового усилителя может использоваться некоторый тип АЦП. Поскольку качество выходного сигнала не очень критично, может быть достаточно простого аналогового выхода ШИМ-типа. Цифровые усилители лучше всего подключать с помощью цифровой выходной линии. Однако для них также можно использовать аналоговый выход и реализовать генератор схемы (паттерна) переключения на усилителе. С наилучшим согласующим усилителем, с полумостовой или полномостовой схемой, наиболее подходящим является создание схемы переключения непосредственно в цифровой системе. Кроме того, схемы переключения для защиты входа приемного усилителя и подавления шума на выходе усилителя передачи также могут генерироваться непосредственно цифровой системой. Общей особенностью всех вариантов выхода является то, что они должны быть достаточно быстрыми, чтобы точно сохранять фазы при различных возбуждениях одного датчика или между разными датчиками. Таким образом, на выходе должна быть возможность переключения обновлений на растре чаще чем 1/10 полного периода времени, лучше - чаще чем 1/100 полного периода времени. Для датчика, скажем, в 2 кГц это означает обновление растра с частотой более 220 кГц, даже лучше 200 кГц. Это не означает, что каждый раз в точках растра должны быть возможны изменения состояния переключения. Так, например, возможно иметь последовательный интерфейс для каждого усилителя, который передает новое состояние переключения усилителю, и протокол для выполнения этого изменения в конкретное время по тому же последовательному интерфейсу. Это особенно полезно для усилителя такого типа, который по умолчанию не функционирует во время фазы приема. Для этого может быть реализован 1-битный последовательный интерфейс, для которого требуется только один оптрон на усилителе. Это позволяет легко достичь шумозащищенности со стороны цифровой передачи, так как паразитная емкость в одном оптроне может быть очень низкой.
Ниже будет рассмотрен аналого-цифровой интерфейс. Аналого-цифровое преобразование является довольно стандартным. Поскольку сигнал имеет низкую полосу пропускания, по меньшей мере мере если используется только один датчик, можно было бы микшировать сигнал до тока, близкого к постоянному току, и осуществлять выборку этого сигнала (сэмплировать этот сигнал). Однако сигнал датчика имеет довольно низкую частоту, обычно ниже 10 кГц. Сегодня существует множество подходящих микросхем АЦП для непосредственного осуществления выборки. Тем более, что цифровая обработка сигналов очень плоха по сравнению с аналоговыми фильтрами, лучше всего использовать в АЦП сильно избыточную выборку. Следует использовать как минимум в 10 раз большую частоту датчика, но в 100 или 1000 раз - также являются допустимыми вариантами. Сильно избыточная выборка упрощает и удешевляет конструкцию входного фильтра АЦП, поскольку должна проходить только частота сигнала датчика, в то время как выше частоты Найквиста сигнал проходить не должен. Однако фильтрация ниже частоты датчика также полезна, чтобы избежать там обычных высоких фоновых сигналов. Высокий фоновый сигнал может уменьшить возможное усиление перед АЦП, увеличивая вклад шума АЦП. Шум АЦП (количество эффективных битов) и выборки должны соответствовать требуемому динамическому диапазону и ожиданиям шума. Это означает, что АЦП не должен находиться в состоянии насыщения при наличии максимального ожидаемого сигнала и всех шумовых компонент. Одновременно шум дискретизации АЦП должен быть настолько низким, чтобы общий шум не увеличивался. Здесь шум означает все нежелательные компоненты зарегистрированного сигнала, возникающие из реальных источников шума, таких как сопротивление катушек или поведение усилителя приема. Он также включает в себя компоненты помех, которые не могут быть устранены подходящей фильтрацией и вычитанием фонового сигнала. Обычно с современными микросхемами АЦП это требование может быть выполнено, например, посредством 18-битных АЦП со скоростью 2 Мвыб./с. Для экономии средств может быть полезно использовать АЦП с более низкими характеристиками, но добавить регулятор усиления, чтобы все равно достичь хорошей общей производительности.
Ниже будет обсуждаться обработка данных. Перед оценкой данных необработанные данные АЦП должны быть обработаны. Поскольку желательной является сильно избыточная выборка, первым этапом обработки может быть этап прореживания. Главное преимущество этого состоит в уменьшении размера данных и, следовательно, необходимой вычислительной мощности для дальнейших этапов. Опционально этап прореживания может включать в себя другие фильтры, т.е. полосовые фильтры вокруг ожидаемой частоты сигнала. Это может упростить дальнейшие этапы обработки и уменьшить динамический диапазон сигнала, что, в свою очередь, может сэкономить вычислительную мощность (переменные с меньшим количеством битов). Еще одним опциональным этапом обработки данных является применение обратного нелинейного фильтра для уменьшения нелинейности приемной системы. Это означает, что измеряется нелинейность полной приемной системы и создается вычислительный фильтр для устранения эффекта нелинейности. Это особенно полезно, если используются недорогие компоненты, поскольку они, как правило, имеют более нелинейное поведение. Этот нелинейный фильтр может альтернативно использоваться на первом этапе обработки. Если используется более одного принимаемого сигнала, то выполняются дополнительные этапы обработки сигнала. Если по меньшей мере один канал приема не детектирует сигнал датчика и, таким образом, обеспечивает измерение фонового сигнала, этот (и все другие подобные сигналы) коррелируются с сигналом приема, и коррелирующие компоненты вычитаются из каналов, несущих сигнал. Это вычитание может быть выполнено во временной или частотной области или в сочетании того и другого. Если каналы без сигнала датчика отсутствуют, можно использовать стратегию обработки данных, иногда называемую "виртуальным градиентометром". Он разлагает множество каналов на виртуальные каналы, которые представляют собой линейные комбинации физических каналов, чтобы минимизировать помехи сигналов, которые не генерируются датчиком. Коэффициенты для линейных комбинаций могут быть найдены путем корреляции сигналов каналов, исключая полосу сигналов датчиков.
Кроме того, ниже будет разъяснено осуществление оценки данных. Поскольку изменение давления на датчике изменяет расстояние между магнитными сферами и, следовательно, резонансную частоту магнитомеханического генератора колебаний, частота является основным параметром, который необходимо извлечь из полученного сигнала датчика. Из-за высокой добротности резонатора (постоянная времени до секунд) последующие импульсы возбуждения обычно воспроизводятся до полного затухания колебаний (см. Фиг. 22) и, следовательно, необходимо иметь правильную фазу и момент времени для усиления существующего колебания. Это требует извлечения частоты в реальном времени между последовательными возбуждениями. Частота может быть извлечена либо с помощью алгоритма сравнения, который минимизирует разности фаз между измеренным сигналом и предварительно вычисленными временными кривыми, охватывающими диапазон частот, либо с помощью анализа Фурье, который является предпочтительным способом. Информация о частоте с высоким разрешением может быть получена путем дополнения нулями (англ. zero padding) временной области или интерполяции частотной области и последующей локализации резонансного пика в спектре либо с использованием способа нахождения пика, либо с помощью процедуры подбора кривой. Для дальнейшего повышения точности и надежности определения частоты в оценку могут быть включены высшие гармоники детектируемого резонансного сигнала (см. спектр в правом верхнем углу фиг. 25), например, с использованием взвешенной оценки частоты на основе нескольких гармоник или путем проверки согласованности определения частоты между несколькими гармониками.
В примере, к которому относится фиг. 25, сигнал вторых гармоник на порядок меньше сигнала базовой частоты. Поэтому требуется более качественная фильтрация. Различные этапы фильтрации могут быть использованы для оптимизации сигнала на резонансной частоте и его высших гармониках, таких как аналоговые фильтры возбуждения, такие как блокиратор постоянного тока (постоянной составляющей) и фильтр нижних частот, аналоговые фильтры приема, такие как полосовые фильтры, и цифровые фильтры приема, такие как фильтры с бесконечной импульсной характеристикой (IIR-фильтры, от англ. infinite impulse response) для обработки в реальном времени (фильтр Чебышева II рода шестого порядка). На фиг. 25 центральное положение резонансного пика f0 определяется по самому большому пику в отфильтрованном спектре. Из f0 вычисляется момент времени следующих синфазных импульсов возбуждения. Частота повторения системы составляет от 5 до 30 Гц, обеспечивая отслеживание частотной характеристики в реальном времени (см. Фиг. 32).
На фиг. 25 показан спектр сигнала с цифровой полосовой фильтрацией и без нее (1051 и 1050, соответственно). Отмеченные точки находятся в диапазоне, выбранном для оценки. Разные точечные символы представляют разные типы фильтров, которые на самом деле не демонстрируют существенной разницы и поэтому могут быть проигнорированы. На фиг. 26 полосовой фильтр 1054 присоединен к коммерческому усилителю 1053 звукового диапазона с низким уровнем шума, причем типа DLPVA-100-BUN-S фирмы FEMTO Messtechnik GmbH. На фиг. 27 фактический спектр подавления 40 дБ цифрового фильтра сравнивается с диапазоном выбранной полосы. Эти две реализации не демонстрируют заметной разницы. Отображаемый фильтр применяется к данным, показанным на фиг. 25, что приводит к разности между 1050 и 1051.
Исходя из определенной частоты и известной временной отметки принимаемых сигналов, можно рассчитать правильный момент времени для следующего блока импульсов возбуждения. Количество и длительность импульсов возбуждения подбирают таким образом, чтобы генерировать колебания с достаточно высокой амплитудой для получения достаточного сигнала в приемных катушках.
Для калибровки датчика давления необходимо получить частотную характеристику для многих четко определенных давлений, действующих на датчик. С этой целью высококачественный датчик давления может быть подключен к камере давления, содержащей датчик (см. фиг. 28 и 29). На основе одного или нескольких измерений в соответствующем диапазоне давлений (до 400 мбар выше давления окружающей среды для безопасного охвата диапазона артериального давления) можно определить калибровочную кривую зависимости частоты от давления, как показано на фиг. 30. В зависимости от свойств датчика может быть достаточно простой подгонки к калибровочной кривой. Однако реальный датчик может демонстрировать гистерезисное поведение, динамический отклик мембраны или других механических элементов датчика или температурную зависимость. Таким образом, может потребоваться подогнать модель, основанную на физических параметрах датчика, к измеренным данным калибровки, чтобы получить высокоточную калибровку датчика.
На фиг. 28 схематично и в качестве примера показана калибровочная установка для калибровки датчика давления, причем калибровочная установка содержит аппликатор 1070 давления, камеру 1071 давления, датчик 1072 эталонного давления, который может быть коммерческим датчиком давления и блок 1073 регистрации и отображения данных. Аппликатор 1070 давления прикладывает конкретное давление, измеренное датчиком 1072 эталонного давления, в то время как резонансная частота измеряется таким образом, что во время этой процедуры калибровки измеренные резонансные частоты могут быть присвоены фактическим значениям давления. На фиг. 29 схематично показан блок 1073 регистрации и отображения данных, показывающий измеренное эталонное давление 991 и измеренную частоту 990 отклика датчика, т.е. на фиг. 29 показано отображение в реальном времени детектированной частоты отклика датчика в зависимости от давления, измеренного с использованием коммерческого датчика эталонного давления. На фиг. 30 в нижней части показана соответствующая калибровочная кривая 890, а в верхней части - сравнение между эталонным давлением 892 и резонансной частотой 891, которые находятся в хорошем соответствии. Чувствительность этой примерной калибровочной кривой составляет 0,17 Гц/мбар, что соответствует, если предполагается разрешение по частоте около 20 МГц, разрешению по давлению около 0,1 мм.рт.ст.
Чувствительность датчика определяется величиной изменения частоты на изменение давления. Это зависит от нескольких параметров, таких как конструкция датчика, жесткость мембраны, размер магнитных элементов и расстояние между магнитными элементами. Для данной конструкции и размера датчика моделирование позволяет определить оптимальное расстояние между магнитными элементами, а также требуемые свойства мембраны для оптимального отклонения в зависимости от приложенного давления. На фиг. 31 показан пример моделирования, предсказывающий чувствительность датчика в интересующем диапазоне частот для двух размеров датчика. На этой фигуре кривая 437 соответствует демонстрационному образцу, а кривая 438 соответствует описанному выше целевому размеру для применения для фракционного резерва кровотока (FFR, от англ. fractional flow reserve).
Помимо относительной чувствительности датчика, определенной выше, абсолютная чувствительность или разрешение по давлению зависят от уровня шума при определении частоты. В примере, показанном на фиг. 32, уровень шума составляет около 0,2 Гц и ограничивает разрешение датчика примерно до 1 мбар, при этом кривая 441 показывает частотную характеристику датчика, а кривая 442 показывает измеренное эталонное давление. На фиг. 32 показан уровень шума на начальном демонстрационном образце, который ограничивает разрешение по давлению примерно до 1 мбар. Этого уже достаточно для большинства медицинских применений. Улучшенные стратегии удаления фонового шума могут еще больше увеличить разрешение.
Процессор системы считывания для беспроводного считывания показаний соответствующего датчика давления может быть выполнен с возможностью применения алгоритма компенсации, чтобы скорректировать определение значения давления для зависимости резонансной частоты по меньшей мере от одного из а) расстояния между датчиком давления и генератором поля и b) синфазного возбуждения катушки. Эта компенсация будет более подробно разъяснена ниже.
Здесь представлены способы компенсации влияния расстояния, а также ориентации на частоту в магнитомеханическом резонаторе для измерения положения и параметра, т.е. давления. Эта компенсация требуется только тогда, когда измеряется физический параметр, такой как давление, и информация кодируется в частоте генератора колебаний. Для локализации генератора колебаний, которая будет объяснена ниже, частотные эффекты либо нерелевантны, т.е. не имеют значения (кодирование чувствительности обсуждается ниже), либо незначительны (кодирование градиентного поля также обсуждается ниже). Для локализации с использованием способа градиентного поля, который также воздействует на частоту датчика, эти компенсации не требуются, так как необходимо оценить только изменение частоты за субсекундный период времени. Это изменение не сильно зависит от амплитуды колебаний.
Сигнал магнитомеханических генераторов колебаний детектируется по напряжению ui(t) индуцированному в i-ой катушке в результате изменения поля из-за колебательного движения магнитного момента m(t) подвешенной магнитной сферы в положении r0:

где BS,i(r) - чувствительность i-ой детекторной катушки в положении r, которое в основном остается постоянным с течением времени. На последнем этапе магнитный момент был заменен с помощью

где  - единичный вектор, описывающий пространственную ориентацию намагниченности, Msat - намагниченность насыщения используемого материала (обычно от 1,30 до 1,45 Тл/μ0 для NdFeB), a Vsphere - объем магнитного объекта.
- единичный вектор, описывающий пространственную ориентацию намагниченности, Msat - намагниченность насыщения используемого материала (обычно от 1,30 до 1,45 Тл/μ0 для NdFeB), a Vsphere - объем магнитного объекта.
Из (4) следует, что для индуцирования высокого напряжения в приемных катушках желательно иметь большой динамический магнитный момент. Поскольку в большинстве применений объем сфер должен быть небольшим, сигнал может быть увеличен за счет использования большой амплитуды колебаний, приводящей к большому  . Однако восстанавливающий крутящий момент не увеличивается линейно с углом ϕ (т.е. амплитудой колебаний) между восстанавливающим полем Brest, создаваемым неподвижной сферой, и намагниченностью m колеблющейся сферы:
. Однако восстанавливающий крутящий момент не увеличивается линейно с углом ϕ (т.е. амплитудой колебаний) между восстанавливающим полем Brest, создаваемым неподвижной сферой, и намагниченностью m колеблющейся сферы:

Учитывая крутящий момент, обусловленный трением  с коэффициентом С затухания, и крутящий момент, необходимый для углового ускорения сферы с массой ms и радиусом rs,
с коэффициентом С затухания, и крутящий момент, необходимый для углового ускорения сферы с массой ms и радиусом rs,  , можно составить уравнение движения:
, можно составить уравнение движения:

Аппроксимация малого угла sin ϕ≈ϕ и замена m=MsatVsphere приводят к

Высокая добротность системы обеспечивает возможность дальнейшей аппроксимации С≈0 и позволяет вычислить угловую резонансную частоту как:

Поскольку микрогенераторы колебаний обычно приводятся до амплитуд, намного превышающих 10°, эта аппроксимация в общем случае неверна. Для больших углов восстанавливающий крутящий момент меньше, и, следовательно, происходит уменьшение частоты, что приводит к зависящей от амплитуды частоте ω(ϕmax)=ω0 k(ϕmax), с k(ϕmax)<1. Изменение восстанавливающего крутящего момента во время колебания, кроме того, вносит нелинейность в отклик датчика, что проявляется в наличии высших гармоник базовой частоты в спектре.
В дополнение к нелинейному восстанавливающему моменту сила между двумя магнитными сферами зависит от взаимной ориентации их намагничивания:

Для данной конструкции датчика сила всегда направлена вдоль вектора соединения двух магнитных сфер, однако ее величина стремится к нулю при амплитуде колебаний 90° и даже переходит от притяжения к отталкиванию при более высоких углах. Если нить, на которой подвешена сфера, удлиняется из-за приложенной силы, то уменьшение средней силы при высоких амплитудах колебаний увеличивает расстояние между сферами, уменьшая Brest и, следовательно, частоту колебаний. Не только нить может изменять свою длину, но и потенциально другие структуры в датчике.
Если бы поля возбуждения, создаваемые передающими катушками, имели постоянную амплитуду, амплитуда ϕmах колебаний уменьшалась бы с увеличением расстояния между катушкой и датчиком (уменьшение поля возбуждения) и, следовательно, частота уменьшалась бы. Амплитуда также зависит от относительной ориентации между катушками и датчиком, как показано на фиг. 33.
На фиг. 33 показана измеренная зависимость амплитуды сигнала в различных гармониках от ориентации датчика относительно одной приемопередающей катушки. Если поле возбуждения выровнено параллельно ориентации магнитного диполя, возбуждения не происходит, и сигнал равен нулю. При ортогональном выравнивании поля и диполя достигается наибольшая амплитуда колебаний. Следует отметить, что пространственная структура четных гармоник выровнена ортогонально относительно нечетных гармоник. Это видно по нулю амплитуды 2-й гармоники при ориентации, соответствующей максимуму в базовом сигнале (1-ой гармонике) и 3-й гармонике. График отношения амплитуд (центральный график) подчеркивает эту разницу в зависимостях ориентации: отношение 2-й гармоники к 1-й гармонике изменяется от нуля до максимального значения (или сингулярности), в то время как отношение 3-й гармоники к 1-й гармонике является постоянным. Знание того, что динамический отклик на четных гармониках ориентирован ортогонально к динамическому отклику на нечетных гармониках, может быть использовано для определения 3-го угла ориентации датчика.
Таким образом, наивное определение частоты приведет к показаниям, которые зависят не только от физической величины, но также от положения и ориентации датчика. Как правило, это нежелательно, и поэтому предпочтительно используются механизмы для уменьшения этого эффекта.
Существует две стратегии смягчения этого эффекта. Одна из них заключается в обеспечении того, чтобы амплитуда колебаний оставалась постоянной для всех допустимых положений и ориентаций (т.е. в поле зрения). Другая заключается в вычислении виртуальной частоты по одному или нескольким показаниям частоты, где виртуальное показание не зависит от амплитуды колебаний. Выбранная виртуальная частота может быть резонансной частотой с очень низкой амплитудой, т.е. частотой с нулевой амплитудой, как указано в уравнении (8). Естественно, можно использовать комбинацию этих двух стратегий.
Ниже будет описано управление амплитудой колебаний, в котором используют положение и ориентацию датчика давления, известные из локализации.
Концептуально самый простой способ скорректировать сдвиг частоты - это использовать известное положение и ориентацию относительно массива передающих / приемных катушек. Это положение может быть получено с помощью кодирования чувствительности или кодирования градиентного поля или их комбинации, описанных ниже. Когда положение и ориентация известны, можно определить абсолютный динамический дипольный момент. Обычно динамический дипольный момент уже является подходящим параметром при определении положения. В противном случае он выводится из известной чувствительности катушек при относительном положении и ориентации датчика и зарегистрированном уровне сигнала, как указано в уравнении (3). По динамическому дипольному моменту и известному статическому дипольному моменту датчика можно вывести амплитуду колебаний. (Если статический дипольный момент датчика ранее неизвестен, его можно вывести из нескольких динамических дипольных моментов, измеренных при разных амплитудах возбуждения, как достигнутый или экстраполированный максимально возможный динамический дипольный момент.) Теперь амплитуду поля передачи можно регулировать для достижения предварительно заданного максимального угла ϕmax колебаний. Немного более простой, но также немного менее надежный способ состоит в том, чтобы просто отрегулировать передаваемую амплитуду до такого значения, чтобы компонента поля возбуждения на датчике всегда была постоянной. Обычно в процессе возбуждения доминирует одна направленная компонента поля (амплитуда в одном направлении относительно датчика). Амплитуда зависит от различных одновременных токов возбуждения в нескольких катушках возбуждения. Амплитуда и фаза тока в катушках регулируются таким образом, чтобы обеспечить требуемую амплитуду в требуемом положении и требуемой ориентации. Как это делается, хорошо известно в области электромагнетизма. Поскольку решение этой проблемы и предыдущий способ регулировки передаваемых амплитуд являются неоднозначными, используется по меньшей мере один второй критерий для текущей оптимизации. "Неоднозначный" в данном контексте означает, что множество комбинаций амплитуд и фаз в токах передающей катушки имеют один и тот же желаемый результат. Вторым критерием обычно является минимизация нежелательного побочного эффекта возбуждения. Примерами нежелательного побочного эффекта являются общая рассеиваемая мощность, максимальная рассеиваемая мощность в одной катушке, максимальная температура в одной катушке (которая также зависит от истории возбуждения), нагрев или силы в окружающих объектах. Естественно, для этой оптимизации можно использовать любой другой связанный критерий или комбинации. Также допустимо использовать не оптимальное, а просто первое допустимое решение, найденное конкретным алгоритмом оптимизации (например, градиентным спуском или имитацией отжига и т.д.).
Ниже будет описано определение частоты с нулевой амплитудой, при котором используют положение и ориентацию датчика давления, известные из процедуры локализации.
Второй подход, при котором амплитуда не регулируется, но частота преобразуется, например, в частоту с нулевой амплитудой, может быть описан также для случая известного положения относительно массива катушек. Для такого подхода необходима модель датчика. Эта модель описывает отношение частоты и угла колебания непосредственно или в какой-либо эквивалентной форме, такой как частота и сила динамического дипольного момента. Эта модель может быть в таком виде, что частота выражается как частота с нулевой амплитудой минус функция, зависящая от амплитуды колебаний. Могут работать и более сложные описания, например, умножение на поправочный член, подобный k(ϕmax) и введенный после уравнения (6) выше. И частота, и амплитуда могут интерпретироваться как среднее значение или аппроксимирующая кривая в течение предварительно заданного периода интегрирования или предварительно заданной длины последовательности. Поскольку положение и чувствительность катушки известны, амплитуда колебаний может быть определена по зарегистрированным сигналам, как описано выше. Таким образом, поскольку фактическая частота и амплитуда известны, частота с нулевой амплитудой может быть выведена путем инвертирования модельной функции. Инверсия может быть выполнена аналитическим методом или с помощью хорошо известных численных методов. Математически вместо частоты с нулевой амплитудой можно использовать также любую другую связанную величину, например, частоту с амплитудой 10°, а также величины, которые вообще не отражают частоту, например, абсолютное расстояние между сферами. Однако такое преобразование не меняет фундаментального характера этого процесса оценки.
Обычно даже при использовании способа экстраполяции с нулевой амплитудой для большинства применений предпочтительно вводится какая-либо регулировка амплитуды. Если датчик находится рядом с массивом катушек, можно использовать меньший ток через катушки, чем когда датчик находится дальше от массива. Способ экстраполяции с нулевой амплитудой имеет то преимущество, что он может работать, даже если датчик находится так далеко, что предварительно заданная амплитуда колебаний для способа постоянной амплитуды больше не может поддерживаться из-за ограничений на ток катушки.
В приведенных выше описаниях предполагалось, что амплитуда колебаний может быть выведена на основе известных положения и ориентации датчика и индуцированного напряжения в приемных катушках. Однако любой другой способ, который может предоставить информацию об амплитуде, может быть использован для компенсации частоты, зависящей от амплитуды, с использованием как постоянного возбуждения, так и способа экстраполяции. Ниже будут представлены некоторые альтернативные способы определения этой амплитуды. Эти способы могут быть полезны, когда доступно только небольшое количество катушек, и точное относительное положение не может быть определено. Сами способы компенсации не будут повторяться в тексте ниже.
Ниже будет описано, как можно определить амплитуду колебаний, используя амплитуды гармоник базовой частоты.
Одним из способов определения амплитуды колебаний является оценка гармоник индуцированного сигнала в катушках. Будучи нелинейными генераторами колебаний, магнитомеханические датчики генерируют гармоники резонансной частоты в динамическом дипольном моменте. Эти гармоники улавливаются в приемной катушке (приемных катушках). Предпочтительно, следует позаботиться о том, чтобы не подавлять эти кратные базовой частоте значения на этапе выборки и фильтрации. Спектр гармоник зависит от характеристик датчиков. Могут быть датчики, которые преимущественно генерируют нечетные гармоники (при 3ω0, 5ω0, …),а могут быть датчики, которые генерируют четные и нечетные гармоники (при 2ω0, 3ω0, 4ω0, …). Однако могут быть созданы смешанные типы. Динамический дипольный момент нечетных гармоник имеет тенденцию выравниваться с динамическим дипольным моментом основной частоты, в то время как четные гармоники имеют тенденцию выравниваться перпендикулярно динамическому дипольному моменту базовой частоты и перпендикулярно оси вращения. Следовательно, нечетные гармоники концептуально проще всего использовать, потому что отношение, скажем, динамического дипольного момента третьей гармоники к дипольному моменту базовой частоты отражается как соответствующее отношение в зарегистрированных напряжениях в одной катушке, например, оценивается как амплитуды спектральных пиков. Однако, поскольку усиление в приемной системе может зависеть от частоты, предпочтительно применяется поправка для определения истинного отношения динамического дипольного момента 3-й гармоники и динамического дипольного момента базовой частоты. Это отношение может быть измерено в течение предварительно заданного периода интегрирования. Для каждого датчика может быть предусмотрена калибровка этого отношения к амплитуде колебаний или непосредственно к сдвигу частоты и, следовательно, могут быть применены поправки. В случае четных гармоник ситуация несколько сложнее, так как направление динамических дипольных моментов не совпадает с динамическими дипольными моментами базовой частоты. Таким образом, здесь обычно требуется использовать более одной катушки, или ориентацию катушки относительно датчика необходимо определять другими средствами. В то время как при большом наборе катушек (например,>=6) можно восстановить как положение, так и ориентацию датчика, несколько катушек (например, 3-5) должны по меньшей мере позволять восстанавливать ориентацию датчика относительно катушек, используя способы, аналогичные способам определения местоположения, описанным в настоящем документе. Затем истинное отношение динамических дипольных моментов для четных гармоник может быть определено с использованием чувствительностей катушки. Промежуточный этап определения ориентации может быть опущен, и может быть установлена непосредственная карта (сопоставления) отношений амплитуд базовой частоты и амплитуд гармоник в катушках с использованием методов линейной алгебры. Следует понимать, что методы, описанные здесь в частотной области, могут быть сопоставлены с методами в других основаниях, таких как временная область. Во временной области частотный анализ сопоставляется с анализом формы колебаний. Эти методы сопоставления хорошо известны в математической литературе.
Ниже будет описано определение амплитуды колебаний на основе огибающей функции во временной области.
Другим способом определения амплитуды колебаний является использование нелинейного поведения затухания сигнала. Затухание датчика обычно нелинейно. Нелинейное затухание означает, что при удвоенной накопленной энергии средняя рассеиваемая мощность датчика не удваивается, а увеличивается в количество раз, большее двух. Причиной этого может быть растяжение нити из-за модуляции силы, описанной выше. Уравнение (9) показывает, что при низких амплитудах колебаний силы притяжения между магнитными объектами по большому счету постоянны, но при более высоких амплитудах это постоянство не сохраняется. Это изменение силы зависит в первом приближении от квадрата амплитуды колебаний, что соответствует аппроксимации косинусоидной функции параболой. Эта квадратичная зависимость является причиной нелинейности рассеяния. Изменяющаяся сила между магнитным объектом периодически растягивает нить (нити), что приводит к рассеянию. Другие эффекты также могут привести к нелинейному поведению. В совокупности эти эффекты приводят к тому, что форма огибающей кривой затухания в течение заданного времени зависит от начальной амплитуды. Таким образом, если датчик имеет постоянную начальную амплитуду колебаний, и расстояние и/или ориентация датчика изменены относительно приемной катушки (приемных катушек), находят масштабированную версию начальной огибающей затухания. Однако при изменении амплитуды возбуждения датчика изменяется не только общая амплитуда кривой затухания, но и ее форма. Это означает, что эффекты амплитуды и эффекты расстояния / ориентации могут быть распутаны, и, следовательно, начальная амплитуда колебаний может быть восстановлена, например, с помощью справочной таблицы предварительно записанных кривых затухания. Это снова приводит к возможности определения частоты с нулевой амплитудой или к управляемому возбуждению с постоянной амплитудой, как описано выше. Для работы этого способа требуется только одна катушка. Однако он несколько чувствителен к перемещению датчика во время регистрации, так что это также изменяет форму огибающей. Поэтому предпочтительно включить в оценку модель вероятных перемещений датчика. Например, если известно, что датчик не будет выполнять быстрые ускорения, полезно скорректировать огибающую кривой затухания с учетом предположения о постоянном движении.
Определение амплитуды колебаний на основе амплитудного отклика сигнала на изменения полей возбуждения будет объяснено ниже.
Еще одним способом определения амплитуды колебаний является анализ реакции сигнала датчика на различную силу возбуждения. В этом случае импульсы тока систематически изменяются и оценивается отклик датчика (датчиков) на различные импульсы возбуждения. Ток, длительность и фаза импульса передачи, или их комбинация, могут изменяться. Например, предположим, что имеется два импульса возбуждения. Если расстояние велико, а амплитуда локального поля мала, два импульса предназначены для генерации в два раза большей амплитуды, чем произвел бы один импульс. Однако, если расстояние мало, а локальное поле на датчике велико, амплитуда будет менее, чем в два раза больше амплитуды. Это приводит к характерному снижению напряжения приема по сравнению с ожидаемым в два раза. Таким образом, отношение (отношения) амплитуд (Фурье) принимаемого сигнала датчиков для заданной схемы возбуждения является мерой амплитуды возбуждения и может снова использоваться для экстраполяции на частоту с нулевой амплитудой и/или для получения постоянной амплитуды возбуждения. Кроме того, могут быть оценены и другие величины, такие как частота и время затухания. Отношения этих величин также характерны для амплитуды колебаний и могут быть использованы для экстраполяции на частоту с нулевой амплитудой.
Ниже будет описано определение правильного параметра на основе полной модели всех способствующих факторов.
Все способы, описанные выше, являются лишь способами оценки, причем некоторые способы, требуют изменений в передаваемых полевых импульсах. Для осуществления этих оценок не требуется никаких изменений аппаратного обеспечения системы. Поэтому логично реализовать их все. Это может быть сделано путем простого параллельного выполнения оценок и объединения результатов таким образом, чтобы минимизировать шум, т.е. получить средневзвешенное значение в соответствии с относительным шумом. Хотя это относительно просто и легко реализовать, лучших результатов можно ожидать при использовании действительно комплексного математического подхода, который будет описан ниже. С другой стороны, математически сложный подход значительно сложнее реализовать, и для его выполнения может потребоваться слишком много вычислительных ресурсов на экономичном компьютерном оборудовании. Основой для правильного математического подхода является математическая модель датчика. Эта модель предсказывает отклик датчика на поля возбуждения, текущее состояние датчика и измеряемый параметр, т.е. окружающую среду датчика.
Состояние датчика может представлять собой только текущий угол отклонения и скорость вращения подвешенной сферы. Однако, в частности, но не исключительно, для датчиков давления, это может также включать упругое состояние структур, которые могут деформироваться под действием внешних или внутренних изменяющихся сил. Таким образом, необходимо включить модели гистерезиса мембран и нитей. Эта модель может иметь различные математические формы, но наиболее распространенным способом является формулировка этой модели в виде набора дифференциальных уравнений. Затем также должна быть сгенерирована модель передающей и приемной катушек, включая характеристики фильтра и усилителя. Это может быть сформулировано в дифференциальных уравнениях, хотя здесь представление параметров Фурье также не является чем-то необычным, если передающая и приемная системы являются достаточно линейными по своей природе. Наконец, необходимо обеспечить модель чувствительности передачи и приема катушки. Это может быть просто набор пространственных точек с привязанной чувствительностью и алгоритмом интерполяции между точками. Она также может быть основана на моделировании катушек на основе закона Био-Савара. Эта модель теперь может предсказывать отклик датчика по напряжению в любом заданном местоположении и ориентации с заданной историей импульсов возбуждения и внешних параметров. Таким образом, процедура заключается в изменении положения и ориентации датчика, а также в том, чтобы датчик влиял на физические параметры при моделировании таким образом, чтобы зарегистрированный сигнал и моделирование совпадали наилучшим образом. Могут быть использованы многие хорошо известные способы оптимизации, такие как градиентный спуск или случайные блуждания. Совпадение может быть определено как среднеквадратичное значение суммы разности измеренных точек выборки и смоделированных точек выборки. Совпадение будет наилучшим, если эта величина будет наименьшей. Наилучшее совпадение может быть изменено с введением дополнительных ограничений, например, с помощью модели ожидаемых относительных положений и ориентаций или с помощью ограничения на максимальные ожидаемые ускорения датчика и/или модели измеряемых величин, которые, например, дают ограничение на максимальную скорость изменения этих величин. Также могут использоваться дополнительные входные данные для датчика, например с акселерометров в системе с портативными катушками, по меньшей мере для одних независимых входных данных изменения расстояния и ориентации. Поскольку процессы оценки на основе полной модели требуют больших вычислительных затрат, их можно комбинировать с одним или несколькими из предыдущих способов, чтобы обеспечить хорошую начальную точку для дальнейшей оптимизации.
Процессор также может быть выполнен с возможностью компенсации гравитационных эффектов, как это будет объяснено ниже.
В датчике давления вес подвижного сегмента датчика может влиять на показания давления: если он находится сверху неподвижной части датчика, он сжимает датчик и, таким образом, приводит к очевидному увеличению давления, если он находится внизу, это приводит к очевидному снижению давления. Сила тяжести (вес) на сфере NdFeB диаметром 0,5 мм составляет около 5 мкН. Для сравнения, изменение силы на цилиндрической задней стороне датчика (консервативно предполагая, что диаметр такой же, как у сферы), создаваемое изменением давления на 1 мбар, составляет около 20 мкН. Таким образом, разность сил между ориентацией датчика в воздухе вверх и вниз ограничила бы точность до 0,5 мбар. Чтобы смягчить эту проблему, может быть применена поправка на основе пространственной ориентации датчика, полученной с помощью одного из способов, описанных для восстановления (положения и) ориентации в настоящем документе. В жидкой среде, такой как кровь, влияние веса может быть сведено к минимуму путем приведения в соответствие плотности сегментов датчика с плотностью жидкости, тогда плавучесть компенсирует силу тяжести.
Процессор также может быть выполнен с возможностью компенсации магнитного поля Земли и других эффектов статического поля.
Статические фоновые поля добавляются к полю неподвижного магнитного объекта и, таким образом, модулируют восстанавливающее поле Brest, видимое колеблющимся магнитом. Это изменяет резонансную частоту в соответствии с уравнением (8) и, следовательно, является источником ошибок при измерении посредством изменений частоты генератора колебаний. Это не имеет значения для локализации генератора колебаний. Для магнитных сфер диаметром 0,5 мм, изготовленных из NdFeB с намагниченностью насыщения 1,3 Тл/μ0, поля, создаваемые неподвижной сферой в центре колеблющейся сферы, составляют 16,1 мТл и 6,8 мТл для расстояний от центра до центра 0,75 мм и 1,0 мм, соответственно. Магнитное поле Земли составляет от 25 до 65 мкТл. Разность частот между параллельным и антипараллельным выравниванием компоненты статического поля с максимальным магнитным полем земли в 65 мкТл создаст разность частот около 5 Гц и 9 Гц для вышеуказанных расстояний 0,75 мм и 1,0 мм, соответственно. Что касается типичного разрешения по частоте от 10 до 100 мГц и чувствительности прототипа -0,3 К/Гц для датчика температуры и 20 мбар/Гц для датчика давления, этот расчет в наихудшем случае приводит к существенным ошибкам в измеряемых значениях. Различные стратегии смягчения последствий этого представлены ниже.
Смягчением со стороны датчика является использование конструкции, в которой используются две подвешенные сферы с одинаковым магнитным дипольным моментом и моментом инерции (или подходящим отношением двух величин) вместо одной сферы. Поскольку встречное колебание происходит на одной частоте, эффект статического поля подмагничивания первого порядка, такого как магнитное поле Земли, отменяется.
Другая стратегия смягчения последствий заключается в использовании датчиков абсолютного поля в детекторной системе для измерения величины и ориентации статических фоновых полей. На основе ориентации датчика, определенной с использованием способов, описанных в настоящем документе, может быть рассчитана поправка частоты или поля для получения от датчика правильного значения давления, температуры или других параметров. Для измерения статических фоновых полей можно использовать любой датчик магнитного поля с достаточной чувствительностью и занимаемой площадью, который может быть встроен в систему детекторов. Одним из экономически эффективных вариантов могут быть 3-осевые датчики Холла. Альтернативой может быть 3-осевой массив микроботов с температурной компенсацией с четко определенной частотой с нулевой амплитудой. По изменению их соответствующих частот можно определить величину и ориентацию фоновых полей. В идеале их резонансные частоты выбираются таким образом, чтобы они не мешали частоте датчика, представляющего интерес. Вместо поправки на смещение частоты при оценке можно также использовать катушки систем детектирования с несколькими катушками для генерирования малых полей смещения для уравновешивания магнитного поля Земли и других фоновых полей. Если в поле зрения существуют неоднородные поля из-за присутствия ферромагнитного материала, для характеристики пространственных изменений поля можно использовать несколько наборов 3-осевых датчиков магнитного поля. На основе интерполированной карты (сопоставления) фонового поля, полученной на основе этих измерений, может быть вычислена поправка для датчика в известном положении и ориентации, или могут быть применены соответствующие поправочные поля смещения, или используется смесь двух способов введения поправок.
Датчики давления, а также маркеры должны иметь высокую добротность и должны иметь большую частотную развертку, чтобы быть чувствительными к измеряемой величине в диапазоне, необходимом для конкретного применения. Высокая добротность особенно важна при высоких амплитудах колебаний, когда генерируется самый высокий сигнал. Поскольку два магнитных объекта обладают сильными силами притяжения, и эти силы сильно возрастают с уменьшением расстояния (до 4-й степени расстояния, см. уравнение (9)), оба свойства могут ухудшиться. Большие силы приводят к относительно сильному натяжению по меньшей мере в одной нити, удерживающей по меньшей мере один магнитный объект. Это натяжение само по себе не ведет к рассеянию. Однако, особенно при больших амплитудах колебаний, силы между магнитными объектами уменьшаются, и, следовательно, натяжение нити периодически уменьшается. Это приводит к периодическому удлинению и укорачиванию нити, что обычно приводит к выделению тепла. Следовательно, мощность извлекают из генератора колебаний. Силы также сильно зависят от расстояния до магнитных объектов и становятся очень большими, если объекты приближаются друг к другу. Такое поведение особенно проблематично для датчиков давления. Сила между магнитными объектами функционально эквивалентна внешнему давлению. Таким образом, если внешнее давление увеличивается, магнитные объекты приближаются, что, в свою очередь, увеличивает кажущееся давление. Этот эффект компенсируется при использовании калибровочной кривой измерений для определения давления, но это может привести к ситуации, когда датчик достигает критической точки, в которой магнитные объекты быстро притягиваются друг к другу и, наконец, соприкасаются. Это приводит к состоянию, когда датчик больше не работает. Этого можно избежать, просто сделав мембрану или сильфон датчика давления более жесткими. Однако это снижает чувствительность датчика, т.е. сдвиг частоты на приложенное давление. Для решения этой проблемы описан способ уменьшения силы и изменения силы. Он состоит только из части магнитного материала, который намагничен в противоположном направлении в сравнении с другим магнитным объектом, как показано на фиг. 34.
На фиг. 34 датчик 4001 давления содержит магнитный объект 4008, представляющий собой постоянный магнит, подвешенный на нити 4006, которая предпочтительно представляет собой высокопрочную проволоку, к гибкой части 4010 корпуса 4002. Гибкая часть 4010 предпочтительно представляет собой мембрану, которая может быть латексной мембраной. Остальная часть корпуса 4002 может быть изготовлена из металла или полимера. Корпус 4002 может быть заполнен газом или он может обеспечивать вакуумное пространство, при этом внутреннее пространство имеет ссылочное обозначение 4009 на фиг. 34. Дополнительный магнитный объект 4007 прикреплен с помощью клея 4011 к внутренней торцевой поверхности корпуса 4002. Два магнитных объекта 4007, 4008, как правило, намагничены в противоположных направлениях. Однако неподвижный магнитный объект 4007 также содержит часть с обратной ориентацией 4012 намагничивания.
Таким образом, если задействованы две магнитные сферы, в этом примере по меньшей мере одна сфера получает крышку, намагниченную в противоположном направлении. Крышка расположена рядом с другой магнитной сферой. Если одна сфера неподвижна (зафиксирована), а другая колеблется, лучше всего иметь крышку на неподвижной сфере. Таким образом, динамический дипольный момент датчика не уменьшается. Только частота колебаний немного ниже. Однако также возможно поменять местами исполняемые роли сфер. Противоположно намагниченная часть настолько мала, что на всех рабочих расстояниях суммарная (чистая) сила между магнитными объектами все еще остается притягивающей. Если участок с обратным намагничиванием достаточно мал, условие притяжения может выполняться вплоть до касания магнитных объектов. Существует несколько способов изготовления крышек с противоположным намагничиванием. Один из них состоит в том, чтобы просто добавить немного магнитного материала поверх по меньшей мере одного магнитного объекта. Магнитный материал может быть магнитно-мягким или магнитно-твердым. Это может быть сплошной непрерывный магнитный объект, магнитная краска или что-то среднее. Магнитный материал имеет тенденцию выравниваться таким образом, чтобы он сам по себе образовывал противоположную намагниченность. Кроме того, он также имеет тенденцию прилипать к магнитному объекту. Тем не менее, этот дополнительный материал должен быть приклеен к магнитному объекту, особенно если два основных магнитных объекта могут время от времени касаться друг друга. Чтобы сохранить первоначально желаемую форму, некоторый материал может быть удален с магнитного объекта, подлежащего изменению, например, путем шлифования. Существует альтернативный способ формирования зоны противоположного намагничивания. Ее можно создать просто путем противоположного намагничивания требуемой зоны магнитного объекта. Это может быть достигнуто за счет сильных импульсов тока через проводник вблизи магнитного объекта. Однако это не очень практично из-за чрезмерного нагрева. Этого можно добиться проще, просто нагрев преобразуемую часть магнитного объекта до температуры, близкой или превышающей температуру Кюри. Это приведет к изменению намагниченности. Эффект может быть усилен путем приложения импульсного или постоянного магнитного поля в обратном направлении. Поля могут также включать в себя сильные градиенты при использовании какого-либо магнитно-твердого или магнитно-мягкого материала вблизи зоны воздействия. Поскольку нагрев должен быть достаточно локализованным, повышение температуры должно быть очень быстрым, чтобы общая энергия, вложенная в магнитный объект, была низкой и не приближала его к температуре Кюри целиком. Подходящим источником нагрева может быть лазер. Также могут работать способы резистивного или индуктивного нагрева.
Ниже будет объяснено, как может быть локализован датчик давления.
Для системы слежения необходимо определить ориентацию и трехмерное положение маркера, который также может содержать магнитомеханический генератор колебаний, но также для чисто измерительной системы может потребоваться определить ориентацию и положение генератора колебаний, чтобы обеспечить повышение точности показаний датчика, как обсуждалось выше. Для локализации можно использовать две независимые стратегии локализации. В некоторых ситуациях может быть достаточно одной стратегии, в других ситуациях комбинация обоих способов может быть полезна для повышения точности или выявления систематических ошибок (например, сильный ферромагнетик в рабочей области), которые приводят к противоречащим результатам двух способов.
Одна стратегия относится к локализации, основанной на чувствительности катушки. Этот подход использует тот факт, что каждая i-ая катушка в массиве катушек имеет разный профиль BS,i(r) пространственной чувствительности в зависимости от ее положения и ориентации. Согласно уравнению (3), один генератор затем создает отклик с характеристической амплитудой для каждой катушки, которая определяется соответствующей ориентацией динамического дипольного момента  генератора колебаний относительно BS,i(r). Для восстановления положения и ориентации датчика необходимо определить набор прямых функций, заданных уравнением (4). В конце концов, требуется сопоставление между координатами положения и ориентации 6 маркеров и амплитудами напряжения на базовой частоте или высших гармониках для всех каналов приема. Следующие уравнения описывают, как избавиться от зависимости от времени в уравнении (4), так чтобы было необходимо учитывать только амплитуды. Мы начинаем с включения всех аргументов, т.е. вектора r=(x,y,z)T положения и вектора ϕ=(ϕ, θ, ψ)T ориентации:
генератора колебаний относительно BS,i(r). Для восстановления положения и ориентации датчика необходимо определить набор прямых функций, заданных уравнением (4). В конце концов, требуется сопоставление между координатами положения и ориентации 6 маркеров и амплитудами напряжения на базовой частоте или высших гармониках для всех каналов приема. Следующие уравнения описывают, как избавиться от зависимости от времени в уравнении (4), так чтобы было необходимо учитывать только амплитуды. Мы начинаем с включения всех аргументов, т.е. вектора r=(x,y,z)T положения и вектора ϕ=(ϕ, θ, ψ)T ориентации:

Требуемые профили чувствительности катушки могут быть либо вычислены на основе известных геометрий катушки, измерены в заданных положениях и затем интерполированы, либо определены с помощью того и другого, т.е. модели, которая может быть адаптирована к экспериментальным результатам с соответствующими параметрами подгонки. Для колебания намагниченности явное описание частоты ω и амплитуды α0 колебаний в рамке маркера будет

где штрих указывает на локальную рамку маркера, при этом были использованы разложения тригонометрических функций для малых амплитуд α0 колебаний. Тогда временное изменение будет

где первый член характеризует базовую частотную характеристику, а 2-й член характеризует частотную характеристику 2-й гармоники. Используя матрицы R(ϕ) вращения, можно вычислить намагниченности для общей ориентации в пространстве, т.е.  Таким образом, начиная с (11), амплитуды напряжения для базовой частоты и частоты 2-й гармоники могут быть определены как
Таким образом, начиная с (11), амплитуды напряжения для базовой частоты и частоты 2-й гармоники могут быть определены как

и

соответственно. Соответственно, общее напряжение для i-ой катушки будет составлять

Из набора прямых функций (14) и (15) и измеренных амплитуд отклика положение и ориентация маркера могут быть рассчитаны путем решения системы уравнений с использованием нелинейного метода решения (англ. solver), который является стандартным математическим методом. Точность решения будет улучшаться с увеличением количества приемных катушек, а также с увеличением ортогональности (т.е. величины различий) между их соответствующими значениями чувствительности катушек. Несоответствие между 6 неизвестными и большим (или меньшим) числом каналов приема может быть учтено путем решения системы уравнений методом наименьших квадратов.
Локализация также может быть выполнена на основе кодирования градиентного поля. Так как локализация чувствительности катушки основана на распределении амплитуды, получаемом массивом катушек, частотами маркеров можно манипулировать для получения независимой информации о положении. С этой целью генерируют неоднородное магнитное поле, в идеале имеющее постоянный градиент поля над рабочим пространством, например, путем подачи низкочастотных токов на выбранные катушки массива катушек. Это дополнительное поле изменяет восстанавливающее поле Brest, действующее на колеблющуюся сферу, и, следовательно, ее частоту (уравнение 9). Из-за неоднородного характера поля изменение частоты будет зависеть от положения и ориентации маркера. Путем последовательного применения нескольких полей кодирования (например, градиента поля, применяемого в 6 различных ориентациях) можно определить все три положения и два из трех параметров ориентации маркера. Оставшийся угол может быть взят из отклика датчика более высокого порядка на внешние магнитные поля, однако, ценой более высокой напряженности поля, необходимой для создания достаточного вклада более высокого порядка. Основная идея кодирования связана с градиентным кодированием в МРТ; таким образом, можно выполнять как частотное, так и фазовое кодирование.
Для частотного кодирования неоднородное поле применяют во время считывания сигнала для получения требуемого смещения частоты. Для требуемого пространственного разрешения применяемая напряженность поля кодирования должна быть адаптирована к частотной чувствительности маркера и разрешению по частоте, обеспечиваемому системой. Предполагая, что частотная чувствительность маркера из NdFeB с диаметром сферы 0,5 мм составляет  , для пространственного разрешения Δr=1 мм и предполагаемого разрешения по частоте Δƒ=10 мГц будет необходим градиент поля, составляющий примерно
, для пространственного разрешения Δr=1 мм и предполагаемого разрешения по частоте Δƒ=10 мГц будет необходим градиент поля, составляющий примерно

Эта величина градиента примерно в 100 раз меньше градиента типичных систем МРТ. Таким образом, специальные градиентные катушки с водяным охлаждением не требуются, но катушки приемо-передающего массива могут быть использованы для генерации поля.
Для фазового кодирования поле неравномерного кодирования применяется до считывания сигнала, т.е. зависящее от положения смещение частоты применяется только для короткого окна, в течение которого увеличивается зависящее от положения смещение фазы сигнала. В случае, если разрешение по фазе недостаточно для точной локализации, длительность и/или амплитуда импульсов фазового кодирования могут варьироваться при последовательных возбуждениях, так что можно различить неоднозначности в нарастании фазы (больше 2 пи). Таким образом, полную пространственную информацию получают в течение нескольких считываний. Фазовое кодирование с одной неоднородной конфигурацией поля (например, кодирование одной пространственной оси) может быть объединено с частотным кодированием с другой неоднородной конфигурацией поля (например, кодированием ортогональной пространственной оси) для эффективной локализации. Если приблизительное положение маркера уже известно из подхода кодирования чувствительности (который быстрее из-за его параллельного характера), будет достаточно использовать только несколько этапов фазового кодирования, которые обеспечивают недостающие компоненты высокого разрешения (высокую пространственную частоту), но не полную пространственную информацию.
Как описано в этом описании, сравнение результатов локализации, полученных с помощью кодирования градиентного поля и кодирования чувствительности, может быть использовано для выявления систематических ошибок, например, возникающих в результате фоновых полей. Кроме того, следует отметить, что линейный отклик на низкочастотные внешние поля датчиков, использующих две подвешенные сферы, может быть подавлен; в этом случае отклик более высокого порядка частоты может использоваться для локализации или для проверки работоспособности. Однако чувствительность к полю этих генераторов колебаний намного ниже, так что для кодирования градиентного поля потребуются поля с более высоким градиентом.
Ниже будет описано определение параметров и определение положения для сильносвязанных датчиков.
Определить положение (имеется в виду 3 параметра положения и 3 параметра ориентации) и измерить параметр (например, давление или температуру) особенно сложно, если используется всего несколько катушек. Однако использование всего нескольких катушек является экономически эффективным, а также предпочтительным в некоторых применениях из-за ограничений по пространству. Поэтому желательно модифицировать процедуру детектирования и аппаратное обеспечение таким образом, чтобы работать только с несколькими катушками. Один из способов сделать это - использовать несколько маркеров и/или датчиков связанным образом. "Связанным образом" означает здесь, что несколько датчиков / маркеров, каждый из которых работает с отличной известной частотой, объединены с фиксированной относительной ориентацией в узле. Как правило, датчики крепят к жесткой рамке, но технически в моменты времени проведения оценки необходимо знать только относительные положения датчиков / маркеров. При достаточном количестве датчиков положение можно определить только с помощью двух катушек. Это легче всего увидеть при сравнении с традиционными электромагнитными навигационными системами. Они обычно состоят из нескольких, обычно более 6, передающих катушек и одной приемной катушки, которую располагают и ориентацию которой оценивают. Однако вращение катушки вокруг своей оси (оси динамического дипольного момента) не может быть обнаружено из-за вращательной симметрии катушки. В этом сравнении набор жестко связанных датчиков можно рассматривать как передающий массив, а единственную приемо-передающую катушку - как маркер. Таким образом, можно расположить массив датчиков / маркеров где-нибудь в кольце вокруг оси динамического диполя передающей катушки. Следует отметить, что если катушка не круглая, кольца не являются идеальными кругами в пространстве, но это не меняет аргумента. Таким образом, положение не может быть определено с помощью одной катушки, но с двумя катушками (с непараллельным динамическим дипольным моментом) симметрия нарушается, и может быть определено положение и ориентация массива датчиков / маркеров. Оценку различных сигналов датчиков лучше всего проводить с помощью комплексного модельного подхода, который описан в другом месте настоящего документа. Если кратко, то генерируют модель каждого датчика / маркера в массиве, т.е. в виде дифференциальных уравнений. Эта модель предсказывает отклик датчика на заданное возбуждение. Вместе с моделью передающей / приемной системы (включая усилители, фильтры и катушки) можно предсказать общий отклик массива. Зная импульсы возбуждения в прошлом (обычно необходимо знать только импульсы для нескольких периодов затухания), можно вычислить ожидаемый принятый сигнал для положения датчика и значение параметра. Теперь оптимизируются положение / ориентация датчика, а также физический параметр, который измеряет датчик, чтобы минимизировать разность между вычисленным и фактически принятым сигналом. Также возможно включить предварительные знания в эту процедуру, т.е. разрешить только максимальную скорость перемещения датчиков относительно катушек. Здесь единственное отличие от предыдущего описанного способа состоит в том, что этот процесс выполняется не для одного датчика, а для набора связанных датчиков в массиве или для нескольких массивов одновременно. В массиве датчиков также имеется набор предварительных знаний, а именно относительные положения и ориентации датчиков / маркеров в массиве. Особенно полезно использовать полный параметрический подход или по меньшей мере экстраполяционные подходы частоты с нулевой амплитудой, поскольку трудно обеспечить одновременную работу всех многочисленных датчиков с требуемой амплитудой. Однако подход полной модели требует достаточно больших вычислительных затрат. Чтобы уменьшить необходимую вычислительную мощность, может быть полезно сначала использовать уже объясненные подходы к оценке одного датчика / маркера по отдельности и использовать их результаты в качестве начальных значений для окончательной реконструкции положения и значения на основе полной модели.
Ниже будут объяснены некоторые аспекты калибровки, при этом в первую очередь речь идет о калибровке в присутствии проводящего и магнитно-мягкого ферромагнитного материала.
Присутствие проводящего и, в частности, магнитно-мягкого ферромагнитного материала может препятствовать локализации за счет искажения полей, создаваемых колеблющимся магнитом маркера или датчика, и/или путем искажения поля (полей), создаваемого передающей катушкой (передающими катушками). В меньшей степени показания датчиков также могут быть изменены, особенно в связи с тем, что точность компенсации амплитудных эффектов может быть снижена. Поэтому желательна процедура калибровки полей. Кроме того, предпочтительно также иметь меру для определения того, что в данный момент могут произойти возмущения поля. Итак, во-первых, обсуждаются способы детектирования проблем, связанных с возмущениями. Как правило, система локализации использует массив передающих / приемных катушек. Катушки могут представлять собой отдельные только передающие и только приемные катушки, или одна и та же катушка может использоваться для обеих функций. В любом случае, в этой конфигурации одна катушка может передавать, а все остальные катушки непосредственно принимать передаваемый сигнал. Принятый сигнал сравнивается с сохраненными эталонными значениями. Если фактический принятый сигнал слишком сильно отклоняется от сохраненных значений, срабатывает какое-либо действие, например предупреждение о неточности, запуск процесса самокалибровки или предложение процесса калибровки, включающего взаимодействие с пользователем, или комбинация указанного. Также возможна передача несколькими катушками одновременно. Импульс передачи должен содержать множество частот. Это может быть достигнуто путем генерации импульсов или с помощью развертки частоты или какого-либо промежуточного звена, хорошо известного в литературе. Частотный анализ важен, так как вихревые токи, протекающие по проводящим структурам, сильно зависят от частоты. Таким образом, существенным изменением может быть то, что отношение принятого сигнала на двух разных частотах превышает некоторый предел. Оно также может быть существенным, если по меньшей мере одна спектральная компонента изменяется на заданную величину. Однако равномерное изменение во всем спектре может быть связано с изменением усиления, например, в усилителе приема. Таким образом, если, например, усилители приема сконструированы таким образом, что вероятны изменения усиления, этот эффект может быть использован для установки нового значения усиления в программном обеспечении для компенсации этого изменения усиления. Указанный аргумент сохраняется аналогичным образом, если ожидается, что произойдет изменение усиления в усилителе передачи, но не в приемном тракте. Здесь, в качестве поправки, передаваемая амплитуда изменяется в вычислительной модели (что приводит к изменению амплитуд колебания датчика и т.д.). Также теоретически возможно измерить импеданс одной катушки и использовать его изменение в качестве индикатора изменений вихретоковой среды. Однако возможность измерения импеданса не приходит естественным образом вместе с электроникой, и требуется специальное оборудование. Для детектирования изменений вихревых токов в окружающей среде можно использовать не только связи катушек, но и известные свойства датчиков / маркеров в рабочем диапазоне. В частности, можно встроить датчики непосредственно в массив передающих / приемных катушек. Полезен даже один датчик / маркер. Например, если в систему встроен один маркер в фиксированном положении относительно катушки (катушек), изменение отклика маркера является показателем измененной вихретоковой среды. Еще более выгодно использовать датчик/ маркер, чувствительный к низкочастотным магнитным полям, но нечувствительный или лишь незначительно чувствительный к другим физическим свойствам, которые могут быстро измениться. Этот маркер указывает не только на статическое магнитное поле, но и на наличие ферромагнитного материала. Для детектирования ферромагнитного материала катушки будут питаться не только током на частотах колебаний датчика / маркера, но и током на гораздо более низкой частоте. Подача тока может осуществляться катушка за катушкой или с использованием нескольких катушек. Если измеренный отклик датчика (т.е. изменение частоты из-за приложенного низкочастотного магнитного поля) не совпадает с сохраненным ожиданием, вполне вероятно, что ферромагнитный материал искажает поле. Если в системе имеется достаточное количество катушек, даже нет необходимости устанавливать датчик / маркер, зависящий от поля, в известном положении. При достаточном количестве катушек положение маркера может быть определено с использованием чувствительности катушек на частоте колебаний датчика / маркера и независимо с использованием чувствительности датчика / маркера к магнитным полям тока, близкого к постоянному току (кодирование градиентного поля). Если положения, полученные посредством двух способов, расходятся, вихретоковая (или ферромагнитная) среда изменилась. Однако еще лучше, если в систему будет встроен не один такой датчик, а несколько. Также лучше иметь их в известных положениях, чем в неизвестных положениях. Но также полезно знать хотя бы только некоторые свойства положений вместо того, чтобы не иметь никакой информации о положениях. Практический способ частичного знания состоит в том, чтобы разместить датчики / маркеры на жесткой структуре, которая обеспечивает известное и стабильное во времени положение и ориентацию относительно друг друга. Такая калибровочная "рамка" с датчиками / маркерами может быть размещена постоянно или время от времени в рабочем объеме системы локализации. Если система локализации обнаруживает относительные положения и ориентации, которые расходятся с ожиданиями, в системе наблюдаются возмущения, вызванные вихревыми токами или ферромагнитным материалом. Если, опять же, датчики / маркеры также чувствительны к магнитным полям тока, близкого к постоянному току, а в массиве катушек достаточно катушек, то относительные положения датчиков / маркеров могут быть определены независимо на очень низких частотах, на которых только ферромагнитный материал вызывает возмущения полей, и на резонансной частоте датчика / маркера, на которой как ферромагнетизм, так и вихревые токи приводят к возмущениям поля. Следовательно, может быть получена информация о природе объектов, вызывающих возмущения, например, если ферромагнитный материал вносит свой вклад в такие возмущения. Опять же, наилучшим подходом для детектирования возмущений является полная математическая модель усилителей передачи / приема, катушек и маркера / датчика (маркеров / датчиков). Эта модель также включает в себя известные положения и ориентации, как абсолютные, так и относительные. На первом этапе все положения / ориентации и физические параметры оптимизируют таким образом, чтобы ошибки были сведены к минимуму. Этот этап включает в себя предварительное знание, например, о маркерах с фиксированным положением, прикрепленных к массиву катушек, и об относительных положениях в потенциальных рамках. В качестве дополнительного примечания, "рамка" не обязательно должна быть введена только для калибровки, но маркер, состоящий из множества генераторов колебаний, сам может действовать в качестве рамки. На втором этапе вычисляется общая взвешенная ошибка между ожидаемыми сигналами и доставленными сигналами. Если ошибка превышает конкретное пороговое значение, делается вывод о том, что какой-то материал вызывает возмущение полей. По характеру ошибки (т.е. если она возникает на компонентах, чувствительных к переменному току, или компонентах, чувствительных к постоянному току) можно определить природу материала, вызывающего возмущения.
Последний способ определения наличия возмущений поля также является хорошей начальной точкой для способов компенсации воздействия возмущений поля. Способ проще всего проиллюстрировать, если предположить, что присутствует проводящий материал, вызывающий вихревые токи, но не ферромагнитный материал. При применении описанной выше модели мы получаем правильные положения из оценки сигналов, зависящих от тока, близкого к постоянному току (кодирование градиентного поля), и неправильные положения и амплитуды локального поля на частоте датчика и его гармониках (кодирование чувствительности катушки). Поэтому мы можем искажать высокочастотные поля таким образом, чтобы они соответствовали ожиданиям. После применения искажения все положения и показания датчиков будут улучшены. Полезно не полагаться исключительно на оценку положения, основанную на магнитных полях тока, близкого к постоянному току, поскольку кодирование чувствительности переменного тока намного быстрее. Наиболее важной частью этого способа компенсации является определение правильной модели искажения поля переменного тока. Простое решение состоит в параметризации функции сдвига поля, например, с использованием простых 3D полиномов. Это означает, что значение поля используется не для фактического положения, а для положения, преобразованного 3D полиномами. Это эффективно с вычислительной точки зрения, но может не хватать физического понимания, и неясно, как, например, измерения связи катушек могут быть включены в эту структуру. Поэтому лучше использовать модели, которые ближе к физической реальности. Например, лучше использовать модель поля проводящих пластин вблизи системы катушек, чтобы вызвать требуемые искажения поля. Таким образом, в основном положение, угловая толщина и размер некоторых виртуальных пластин изменяются до тех пор, пока ожидания модели и измеренные данные не совпадут. Как моделировать такие проводящие пластины, хорошо известно в литературе по электромагнитному моделированию. Этот тип моделирования имеет дополнительное преимущество, заключающееся в том, что легко включить формы объектов, которые, вероятно, будут встречаться в конкретной среде. Таким образом, если специальное устройство подведено близко к полю зрения, например С-дуга рентгеновского аппарата, и это устройство известно и может быть смоделировано ранее, то системное программное обеспечение должно оптимизировать только точную ориентацию и положение. Еще одним преимуществом является то, что предполагаемое положение объекта, вызывающего возмущения, может отображаться системой, или данные передаются во вторую систему, которая выполняет задачу отображения. Таким образом, пользователю может быть специально указано на объекты, которые мешают измерению, и пользователь может захотеть переместить или удалить их. Во время этого процесса данные о связи катушек действуют по существу как массив детекторов металла. Включение ферромагнитного материала концептуально такое же, как и в случае с проводящим материалом, который создает вихревые токи. Однако моделирование ферромагнитного материала в вычислительном отношении немного сложнее, и, поскольку может отсутствовать определенное исходное положение, определяемое специальными маркерами, оно может не привести к точному положению. Но опять же, лучше всего смоделировать набор ферромагнитных материалов, например в виде листов и стержней, разместить и деформировать их при моделировании вокруг массива катушек. Здесь для модели очень полезно, если будет обеспечена база данных вероятных ферромагнитных объектов. Кроме того, процесс измерения взаимной связи может быть дополнен измерением генерации гармоник в среде катушки. Наличие гармоник является сильным признаком магнитно-мягкого ферромагнитного материала, а измеренные сигналы дают ценную информацию о размере и положении объектов.
Ниже будет описана генерация импульсов возбуждения.
Система предпочтительно содержит программное обеспечение для генерации момента времени и формы импульсов возбуждения. Этот генератор импульсов возбуждения предпочтительно осведомлен о возможностях аппаратного обеспечения. Возможны различные типы усилителей и фильтров. Усилитель одного типа способен генерировать сигнал тока, который точно следует достаточно произвольному пути. В настоящем документе они называются "аналоговыми усилителями". Усилитель другого типа способен только увеличивать ток с предварительно заданной скоростью, уменьшать его с такой же скоростью и делать его более или менее постоянным. По сути, эти усилители подают напряжение с положительным или отрицательным знаком на катушку или действуют как короткое замыкание. В настоящем документе они называются "цифровыми усилителями". Цифровые усилители могут иметь разную скорость переключения, т.е. допустимое количество изменений состояния в единицу времени. Если скорость переключения намного выше скорости колебаний, цифровой усилитель снова действует как аналоговый усилитель. Следовательно, усилитель этого типа можно концептуально рассматривать как аналоговый усилитель. Если скорость переключения примерно такая же, как частота колебаний маркера / датчика, обработка должна быть немного иной. Однако это более сложная ситуация, поэтому все обсуждение будет сосредоточено на этом. Усилитель этого типа имеет некоторые преимущества перед аналоговыми. Главное преимущество заключается в том, что эффективность этого усилителя обычно очень высока, и легко может быть достигнута эффективность 98%. Еще одним преимуществом является то, что взаимодействие с вычислительной системой является очень простым. Между усилителем и катушкой может присутствовать согласующая схема. Простейшая согласующая схема - это просто конденсатор, подключенный последовательно к катушке. При использовании согласующей схемы максимальный ток через катушку при заданном напряжении питания усилителя увеличивается. Однако такая согласующая схема имеет недостаток, заключающийся в блокировании низкочастотных токов. Для некоторых последовательностей могут потребоваться токи низкой частоты. Решения этой проблемы могут быть двоякими. Во-первых, может быть предусмотрена согласующая схема, прозрачная на высоких и низких частотах. Примером такой схемы может быть схема последовательно включенных катушки или катушечного конденсатора, параллельная первому согласующему конденсатору. Другой способ состоит в том, чтобы иметь переключатель, который обходит согласующую схему, и когда требуется ток, близкий к постоянному току, переключатель замыкается. В обходной тракт также может быть встроен конденсатор, если резонансная частота достаточно низка. Точно так же с помощью множества переключателей и конденсаторов можно обеспечить целый ряд различных согласующих частот. Также следует обратить внимание на то, что даже если схема настроена на ток, близкий к постоянному току, некоторый ток на резонансной частоте маркера / датчика все еще доступен. Следует отметить, что необязательно использовать постоянные токи во время считывания. Есть два основных элемента, обеспечивающих эту возможность. Во-первых, не допускается, чтобы постоянные токи мешали считыванию показаний. Существует серьезная проблема, если передающая и приемная катушки объединены. Источник постоянного тока может обеспечить тракт короткого замыкания для сигнала. Этого следует избегать, и правильная согласующая схема позволяет избежать этого. Согласующая схема должна обеспечивать достаточно высокий импеданс между катушкой и источником постоянного тока. Это может быть достигнуто с помощью дополнительной катушки, последовательно соединенной с индуктивностью порядка индуктивности передающей / приемной катушки. Индуктивность может иметь параллельный переключатель для ее закорачивания, если в ней нет необходимости. Существует множество других доступных решений. Второе условие заключается в том, чтобы источник постоянного тока не создавал слишком большого шума, т.е. шум источника тока не препятствовал точному измерению маркеров / датчиков. Это может быть достигнуто с помощью подходящего аналогового фильтра в случае передачи постоянного тока. Этот фильтр может быть обойден во время импульсов передачи переменного тока с помощью подходящего переключателя (например, оптроны с транзистором MOSFET). Также может оказаться целесообразным избегать переключения в источнике постоянного тока во время приема сигнала и просто использовать медленно затухающий ток в катушке. Также может оказаться целесообразным выполнить всего несколько действий по переключению во время приема и просто удалить принятые данные, если они повреждены. Источники поля постоянного тока могут быть также полностью отдельными катушками, или генераторы поля могут быть (движущимися) постоянными магнитами. Это позволяет избежать большинства проблем. Дополнительная проблема, связанная с наличием постоянных токов во время приема сигнала, заключается в том, что катушки могут обеспечивать различную среду для датчиков. Это означает, что, например, некоторые катушки могут быть закорочены для переменных токов, и поле переменного тока больше не проникает в катушки, изменяя значения поля в соседних катушках. Этот эффект необходимо учитывать при вычислении положений и значений датчиков. Два основных элемента поля взаимодействуют с датчиком / маркером. Один из них представляет собой амплитуду тока, близкого к постоянному току, т.е. значение тока, усредненное за время порядка 0,1 секунды (от примерно 0,01 секунды до примерно 1 секунды). Другой представляет собой амплитуду Фурье (как комплексное значение, так как важна фаза) на резонансной частоте датчиков / маркеров. Поэтому первая задача состоит в том, чтобы сопоставить два значения с генерацией последовательности.
Ниже будет описано сопоставление, если требуется, амплитуд Фурье и токов с конкретной схемой (паттерном) импульсов во временной области.
Также полезно создать программную подсистему, которая выполняет этот точный тип сопоставления, т.е. часть программного обеспечения, которая получает требуемые токи, близкие к постоянному току, и требуемую амплитуду Фурье (и частоту) в качестве входных данных, и которая генерирует последовательности импульсов во временной области. Также желательно, чтобы это программное обеспечение возвращало информацию о том, могут ли требуемые значения быть достигнуты в пределах, налагаемых аппаратными средствами, таких как максимальные токи или максимальный нагрев катушек или нормативные ограничения, например, нагрев пациента или стимуляция периферических нервов. Вместо простой информации типа "да / нет" может быть предоставлена информация о тяжести нежелательных побочных эффектов. Эта информация может быть предоставлена для каждого отдельного канала передачи (для каждой передающей катушки). Дополнительным возвращаемым значением может быть фактический наилучше подобранный выходной постоянный ток и амплитуда (амплитуды) Фурье. Входные данные могут представлять собой не только комбинацию одной частоты и амплитуды Фурье, но также множество амплитуд Фурье на разных частотах. Максимальная длина последовательности импульсов также может быть параметром, который является входными данными для этой функции. Внутренняя обработка заключается в следующем: В случае аналоговых усилителей первый результат может быть сгенерирован просто путем выполнения обратного преобразования Фурье требуемых амплитуд Фурье (и значений постоянного тока) для требуемого времени передачи. Если этот процесс приводит к форме волны, которая не может быть реализована из-за некоторых ограничений, об этом сообщается, и, возможно, для генерации запланирована масштабированная версия. Возможные характеристики фильтра учитываются соответствующей сверткой. Если имеется несколько переключаемых состояний фильтра, все они могут быть протестированы и может быть выбрано то, которое предъявляет наименьшие требования к усилителю. Следует отметить, что существует несколько доступных эвристических подходов, так что в большинстве случаев не все состояния фильтра должны оцениваться. Например, можно опустить фильтры с частотами, далекими от резонансной, если доступны лучшие. Для цифрового усилителя обратное преобразование Фурье (включая эффекты фильтрации) дает хорошую отправную точку для оптимизации. На этом первом этапе аппроксимации результирующие пики во временном спектре аппроксимируются двумя (или, в лучшем случае, несколькими) наклонными областями и плоскими областями между ними. Так, например, полупериод синусоидальной волны, начинающийся с нуля и заканчивающийся нулем, аппроксимируется сначала плоской (нулевой) частью, затем наклонной вверх частью (подъемом), затем плоской частью, затем наклонной вниз частью (спуском) и, наконец, плоской (нулевой) областью. Различные участки расположены во времени таким образом, чтобы достичь приблизительно одной и той же области. После этого первого этапа аппроксимации выполняется второй этап, на котором положения начала наклонной части и плоской части сдвигаются для достижения наилучшего соответствия требуемым Фурье-значениям. Наилучшим вариантом может быть наименьшая сумма квадратов (комплексных) значений разности желаемой и достигнутой Фурье-компонент. Можно использовать все обычные алгоритмы оптимизации, например такие как градиентный спуск.
Ниже будет описано сопоставление требуемых Фурье-значений на датчиках / маркерах с токами в катушках.
Следующий более высокий уровень абстракции программы генерации импульсов - это часть программного обеспечения, которая требует конкретных Фурье-значений и направлений поля в конкретном положении в качестве входных данных и преобразует их в требования к токам в катушке. Алгоритм оценки обычно обеспечивает некоторую меру положения и ориентации датчиков / маркеров. Положение не является и не должно являться положением в трехмерном пространстве. Однако трехмерное положение является идеальным случаем.
Например, если присутствует только одна катушка, может быть возможно определить значение поля только в чувствительном направлении на датчике. Тем не менее, это также приводит к некоторому виртуальному положению и ориентации в 3D пространстве. Таким образом, эти ситуации не требуют специальной обработки в программном обеспечении. В этом случае преобразование под требования к токам катушки является результатом процесса оптимизации. Существует модель, которая вычисляет по токам в катушках Фурье-компоненты поля в конкретных пространственных положениях. Это является основой для оптимизации, при которой Фурье-компоненты тока катушки оптимизируются таким образом, чтобы генерировать требуемые компоненты поля. Обычно не существует однозначного способа формирования требуемых полей из токов катушки. Также может быть так, что требуемые токи несовместимы с ограничениями в аппаратной системе. Программное обеспечение нижнего уровня возвращает значения, описывающие негативные эффекты, и программное обеспечение использует эту информацию для оптимизации токов. Цель оптимизации состоит в том, чтобы найти хороший компромисс между достигнутыми Фурье-компонентами поля на датчиках / маркерах и негативными эффектами. Это означает, что отклонение от желаемых полей и побочные эффекты объединяются в одно число, и для этого числа определяется максимум или минимум с использованием стандартных алгоритмов оптимизации. Объединенное число может представлять собой взвешенную сумму квадратов. Естественно, для этой сущности можно найти огромное количество рабочих математических комбинаций. Наконец, эта часть программы возвращает вызывающей программе (более высокого уровня) достигнутые поля в положениях и значения качества для ее оптимизации.
Ниже будет описана генерация требуемых Фурье-значений поля для маркеров / датчиков.
На этом уровне абстракции программная система фактически имеет дело с измерениями, которые необходимо выполнить. Итак, входными данными для этой программы являются текущие требования к тому, что должно быть измерено, насколько точно и как быстро. Эти требования зависят от фактического применения датчиков / маркеров и поэтому не являются частью данного документа. Требования могут быть самыми разными. Например, если задействован только один датчик, то требуется, например, как можно точнее измерять одну величину, скажем, каждые 0,1 секунды. Если применение представляет собой решение для отслеживания с несколькими связанными маркерами, желаемый результат может заключаться в том, что, скажем, каждые 0,1 секунды выполняется обновление положения для всего узла маркеров, независимо от того, какие из маркеров / датчиков в нем вносят вклад в сигнал (на основе чувствительности катушки) и что каждую 1 секунду требуется независимая проверка положения с помощью градиентного способа. Эта программа также имеет доступ к текущему состоянию датчиков / маркеров (параметры положения / колебаний и т.д.) и имитационной модели, описанной в другом месте настоящего документа. Исходя из этого могут быть вычислены оптимальные Фурье-значения поля возбуждения, включая направление для каждого датчика / маркера. Эти параметры могут быть переданы на ранее описанные более низкие уровни программного обеспечения (с желаемым исполнением где-то в будущем), чтобы в конечном итоге генерировать токи. В случае с одним датчиком это сработает немедленно, и план может быть записан в буферы аппаратного вывода. Однако, например, для отслеживания узла маркеров, скорее всего, не существует формы импульса, которая идеально возбуждает все отдельные датчики / маркеры. В частности, фаза не подходит для всех отдельных датчиков / маркеров. Поэтому программному обеспечению, возможно, придется попытаться сконцентрировать оптимальное возбуждение только на подмножестве имеющихся датчиков / маркеров и попытаться найти решение, которое дает рабочую последовательность импульсов. Это общий принцип работы оптимизации данного программного обеспечения. Оно пытается изменить требуемое возбуждение различных датчиков и фокусируется на нескольких, чтобы все равно получить желаемый результат. Концептуально самый простой подход состоит в том, чтобы просмотреть все возможные подмножества датчиков / маркеров и проверить, какое подмножество возбуждения дает наилучшую информацию о желаемых параметрах. Поскольку существует множество возможных подмножеств, программе необходимо добавить некоторые эвристические методы для уменьшения сложности. Например, сначала можно наблюдать, какие другие маркеры / датчики тоже возбуждены, если заданный один из них возбужден, и они всегда могут быть сгруппированы вместе. Если найдено подходящее решение, оно может быть записано в выходной буфер. Для включения магнитных полей тока, близкого к постоянному току, может потребоваться дополнительная логика в зависимости от аппаратной реализации. Если аппаратное обеспечение способно применять магнитные поля постоянного тока во время регистрации сигналов, программному обеспечению не нужно делать что-то особенное, кроме применения одного или нескольких градиентов во время считывания. Однако, если градиенты постоянного тока и считывание несовместимы, необходим дополнительный этап оптимизации, который создает правильное поле постоянного тока или градиент в некоторый момент времени между импульсами возбуждения. Логика, лежащая в основе оптимизации, остается прежней. Параметры изменяют до тех пор, пока моделирование не предскажет достаточно хорошее значение измерения для данного случая применения.
Генерация последовательности запуска будет описана ниже.
Алгоритм обычно предполагает, что уже имеется достаточно знаний о доступных датчиках для оптимизации последовательности. Обычно в начале последовательности это доступно не в полном объеме. Например, для данного случая применения (устройства) может быть известно, сколько датчиков / маркеров должно присутствовать в устройстве и в каком диапазоне могут быть частоты. Но точные частоты и положения не известны. Поэтому необходима специальная последовательность запуска, которая пытается найти все возможные датчики во всех возможных положениях. Самая простая из возможных последовательностей запуска выглядит следующим образом. Рабочий объем разделен на пространственную 3D или абстрактную сетку. Абстрактная сетка представляет собой сетку, которую следует использовать, если для полного 3D кодирования недостаточно катушек. Каждая пространственная точка разделена на разные направления. Программа просматривает каждое положение и каждый угол в этом положении и применяет максимальную мощность передачи для заданной частоты и предварительно заданного времени передачи. Затем система регистрирует потенциальные сигналы от датчиков / маркеров. Обычно один импульс передачи возбуждает не только один маркер, но и одновременно множество других. Однако эта процедура гарантирует, что даже датчик / маркер с максимально слабым сигналом также будет обнаружен. Опциональным следующим этапом является возбуждение каждого датчика по отдельности с разной амплитудой. Из этого можно извлечь нелинейные свойства. Еще одним опциональным этапом является возбуждение каждого датчика / маркера в присутствии поля постоянного тока или измерение фазы сигнала после поля постоянного тока (опять же в разных направлениях) для определения чувствительности датчиков / маркеров к магнитным полям постоянного тока. Эти базовые процедуры можно значительно ускорить, если использовать некоторые знания об этой системе. Например, вполне вероятно, что, если в удаленном объеме уже выполняется поиск датчика / маркера, многие или все более близкие объемы приняли максимально возможную амплитуду по меньшей мере для некоторых углов. Поэтому для более близких объемов необходимо применить только несколько оставшихся параметров. Та же логика может быть использована для оценки нелинейного характера датчиков / маркеров или их отклика на магнитные поля постоянного тока.
Ниже разъясняются стратегии измерений с высоким разрешением по времени.
Для многих случаев применения желательно иметь высокое разрешение по времени. Одним из примеров является измерение внутрисосудистого давления, которое модулируется сердечным циклом, который может достигать частоты до 200 ударов в минуту у человека. Для определения минимумов и максимумов давления во время сердечного цикла требуется минимальная частота измерений около 5 Гц, предпочтительно выше 10-20 Гц, наиболее предпочтительно выше 40 Гц. С другой стороны, для обеспечения хорошего отношения сигнал / шум необходима очень высокая добротность Q генератора колебаний. Высокая добротность Q означает медленное затухание. Следовательно, когда на датчик передается следующий измерительный импульс, колебания от предыдущего измерительного импульса не полностью гаснут, и они могут повлиять на измерение.
Таким образом, требуются стратегии для достижения высокого разрешения по времени с помощью магнитомеханических генераторов колебаний, как для локализации, так и для определения параметров. Самый простой подход для получения высокого разрешения по времени - просто уменьшить время повторения. Время повторения означает промежуток времени между последовательными импульсами возбуждения. После каждого импульса возбуждения определяют частоту и амплитуду, на основе которых могут быть вычислены физические значения и положение, как описано в другом месте. Однако добротность датчиков / маркеров обычно относительно высокая, и амплитуда колебаний не сильно снижается во время следующего импульса возбуждения. Чтобы всегда получать требуемое возбуждение датчика / маркера, необходимо учитывать фазу следующего возбуждения. Обычно нам требуется "синфазное возбуждение", то есть возбуждение таким образом, чтобы датчик / маркер получал энергию с самого начала импульса возбуждения. Как оптимизировать синхронизацию (выбор моментов времени), описано в другом месте. Синфазное возбуждение сводит к минимуму энергию передачи, и, следовательно, длительность импульса возбуждения может быть сведена к минимуму. Это увеличивает общее отношение сигнал / шум.
Высокая частота повторения имеет некоторые недостатки. Во-первых, во время и вскоре после импульсов возбуждения система обычно не может принимать значения, и, следовательно, отношение сигнал / шум может быть не оптимальным.
Во-вторых, каждый импульс передачи разрушает некоторые знания о фазе колебания датчиков. Только в том случае, если импульс возбуждения и ориентация датчика строго контролируются и точно известны, информация о фазе может сохраниться в некоторой степени, однако это является технологически сложной задачей. Информация о фазе за более длительный период может быть полезна, так как в ней кодируется информация о средней частоте (следовательно, средней физической величине). Измерение средней физической величины значительно точнее при оценке интервала двойной длины, чем просто независимое выполнение оценки первой половины и второй половины и усреднение двух результатов. Поэтому может оказаться целесообразным иметь не так много импульсов возбуждения, как измерений, а извлекать из одного импульса сигнала более одного значения измерения. Это можно сделать, просто разделив сигнал на несколько частей и оценив каждую часть по отдельности. Этот простой подход не учитывает, что измерения становятся лучше, если используется более длинный набор данных. Чтобы учесть это, набор может быть разделен на иерархию поднаборов, и проводится оценка каждого поднабора в каждой иерархии, а средние значения масштабируются в соответствии с более длинными наборами данных. Так, например, набор данных (один невозмущенный затухающий сигнал) сначала оценивают как единое целое. Затем его разделяют на два, и два разделенных набора данных оценивают отдельно. Затем к каждому результату добавляют одно и то же число, чтобы их среднее значение соответствовало среднему значению полного набора. Этот процесс можно повторить, чтобы в конце получить 4, 8 и так далее поднаборов. Этот подход может быть уточнен математически до оценки на основе полной модели. Для этого создается модель эволюции физического параметра (и, возможно, также включающая в себя пространственное перемещение датчика). Эта модель может быть полиномом определенной степени или какой-либо другой подходящей математической функцией. Функция должна описывать физическую природу измеряемой величины таким образом, чтобы требовалось использовать только небольшое количество параметров. Так, например, когда параметром является кровяное давление, модель может быть лучше в виде ряда Фурье, потому что он описывает форму волны давления сердечного ритма лучше, чем полиномы. Затем параметры изменяют, чтобы как можно лучше согласовать набор измеренных данных. Если в конечном итоге необходимы дискретные точки измерения, их можно просто вычислить, используя выходные данные модели для конкретных моментов времени.
Следует отметить, что все описанные варианты осуществления содержат блокирующий диффузию слой, который покрывает по меньшей мере часть корпуса, и который выполнен с возможностью поддержания предварительно заданного давления внутри корпуса, даже если блокирующий диффузию слой показан не на всех чертежах по соображениям ясности. Также конфигурация датчика давления, обеспечивающая температурную компенсацию резонансной частоты, может быть применена к любому описанному варианту осуществления.
Другие вариации к раскрытым вариантам осуществления могут быть поняты и осуществлены специалистами в данной области при осуществлении заявленного изобретения на основе изучения чертежей, раскрытия и прилагаемых пунктов формулы изобретения.
В формуле изобретения слово "содержащий" не исключает других элементов или этапов, а использование единственного числа не исключает множественности.
Один блок или устройство может выполнять функции нескольких элементов, указанных в формуле изобретения. Тот факт, что некоторые меры указаны во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована с выгодой.
Определения, такие как определение резонансной частоты на основе индуцированного сигнала, определение давления на основе резонансной частоты, определение калибровочной кривой и т.д., выполняемые одним или несколькими блоками или устройствами, также могут выполняться любым другим количеством блоков или устройств. Управление системой детектирования может быть реализовано в виде программного кода средствами компьютерной программы и/или в виде специального аппаратного обеспечения.
Компьютерная программа может храниться / распространяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с другим оборудованием или в составе другого оборудования, но также может распространяться в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные обозначения в формуле изобретения не должны толковаться как ограничивающие объем изобретения.
Изобретение относится к пассивному датчику давления для введения в систему кровообращения человека и для беспроводного считывания его показаний с помощью внешней системы считывания. Датчик давления содержит корпус с блокирующим диффузию слоем для поддержания предварительно заданного давления внутри корпуса и магнитомеханический генератор колебаний с магнитным объектом, обеспечивающим постоянный магнитный момент. Магнитомеханический генератор колебаний преобразует внешнее магнитное или электромагнитное поле возбуждения в механические колебания магнитного объекта, при этом по меньшей мере часть корпуса является гибкой для обеспечения возможности преобразования изменений внешнего давления в изменения механических колебаний магнитного объекта. Датчик давления может иметь очень малые размеры и, тем не менее, может обеспечивать измерение давления высокого качества.
| название | год | авторы | номер документа |
|---|---|---|---|
| Отслеживающая система и маркерное устройство, подлежащее отслеживанию отслеживающей системой | 2019 |
|
RU2806663C2 |
| ИМПЛАНТИРУЕМЫЙ ДАТЧИК ДАВЛЕНИЯ, СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2019 |
|
RU2806338C2 |
| МАГНИТНЫЕ МАРКЕРЫ ДЛЯ КОНТРОЛЯ ВО ВРЕМЯ ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА | 2019 |
|
RU2766663C1 |
| СИСТЕМЫ И СПОСОБЫ ОБНАРУЖЕНИЯ МАГНИТНЫХ МАРКЕРОВ ДЛЯ КОНТРОЛЯ ВО ВРЕМЯ ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА | 2019 |
|
RU2754312C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ МАГНИТНЫХ МАРКЕРОВ ДЛЯ ХИРУРГИЧЕСКОГО НАВЕДЕНИЯ | 2021 |
|
RU2808145C1 |
| ПРОСТРАНСТВЕННЫЙ МАГНИТНЫЙ ОПРОС | 1996 |
|
RU2145722C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА ЗАЩИТЫ ОТ КРАЖ | 2003 |
|
RU2268496C2 |
| Устройство для исследования магнитных свойств веществ | 1990 |
|
SU1781650A1 |
| РАСХОДОМЕР КОРИОЛИСА И СПОСОБ ИЗМЕРЕНИЯ РАСХОДА С ИСПОЛЬЗОВАНИЕМ РАСХОДОМЕРА КОРИОЛИСА (ВАРИАНТЫ) | 1994 |
|
RU2155939C2 |
| МЕТАЛЛОДЕТЕКТОР С ПРОСТРАНСТВЕННЫМ РАЗРЕШЕНИЕМ | 2015 |
|
RU2702912C2 |
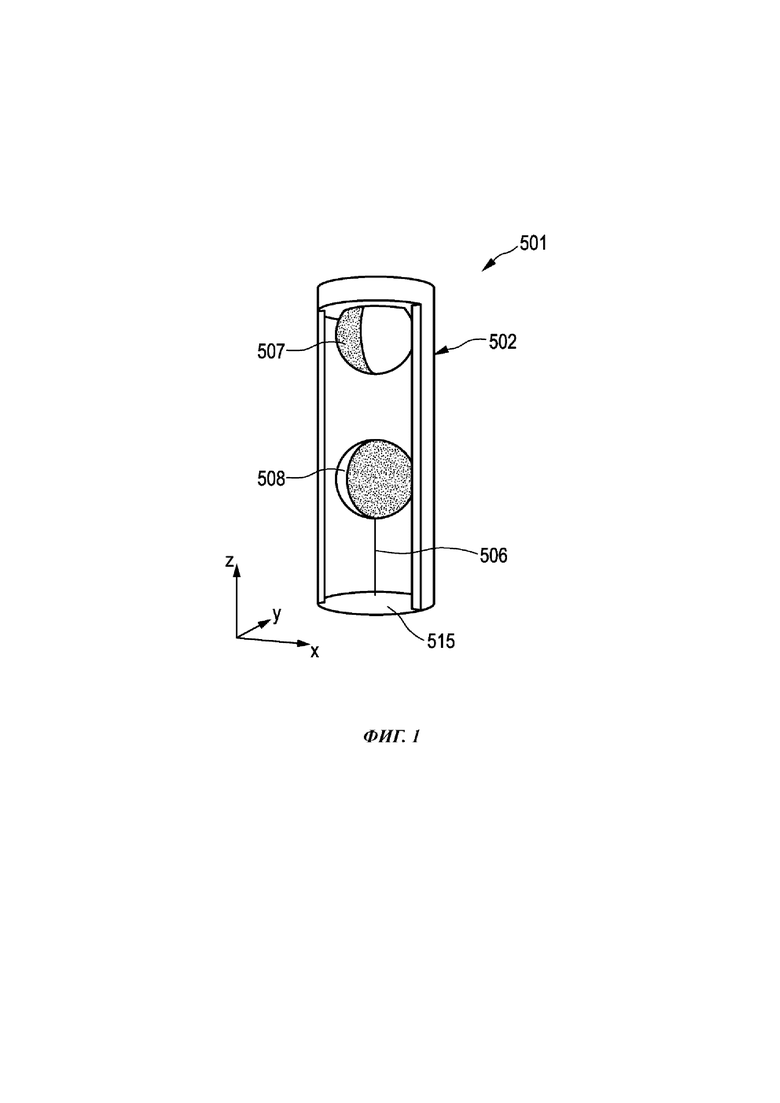
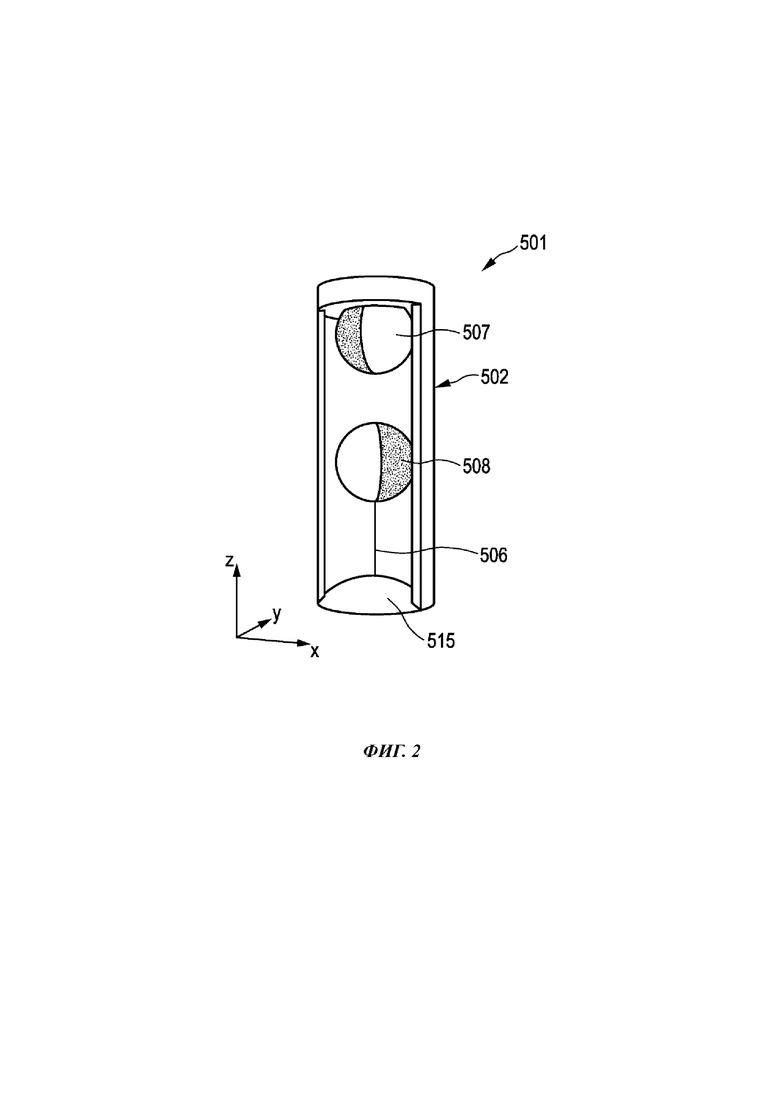
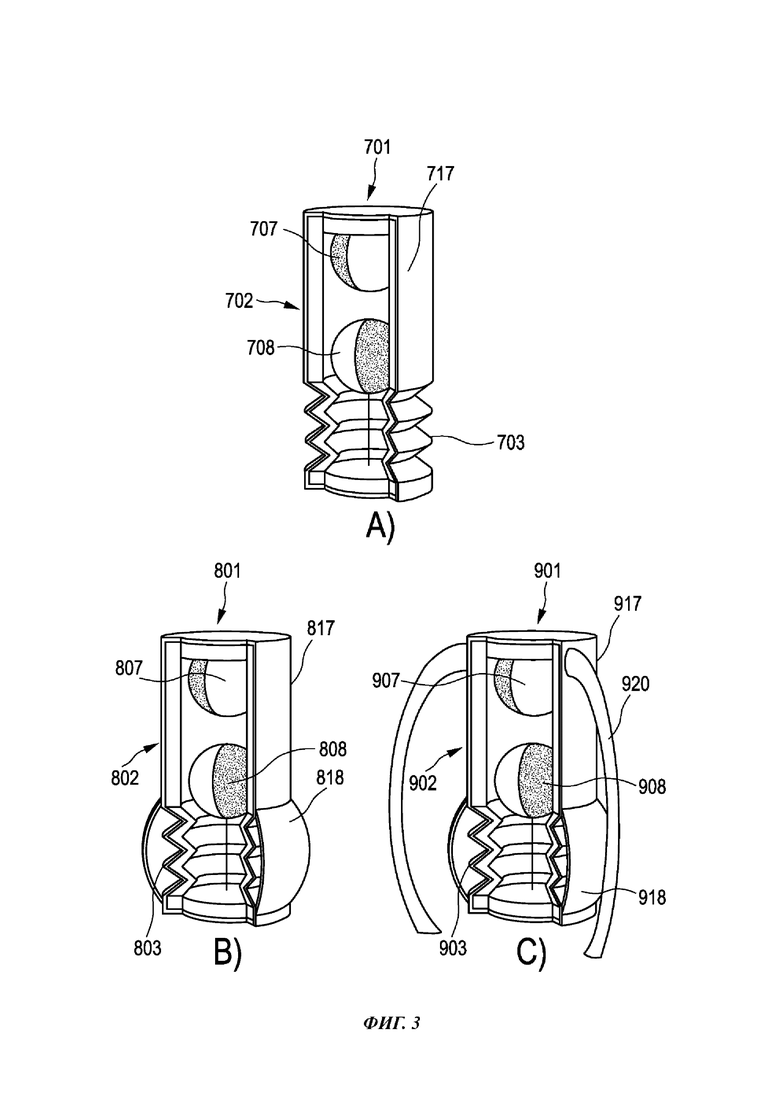
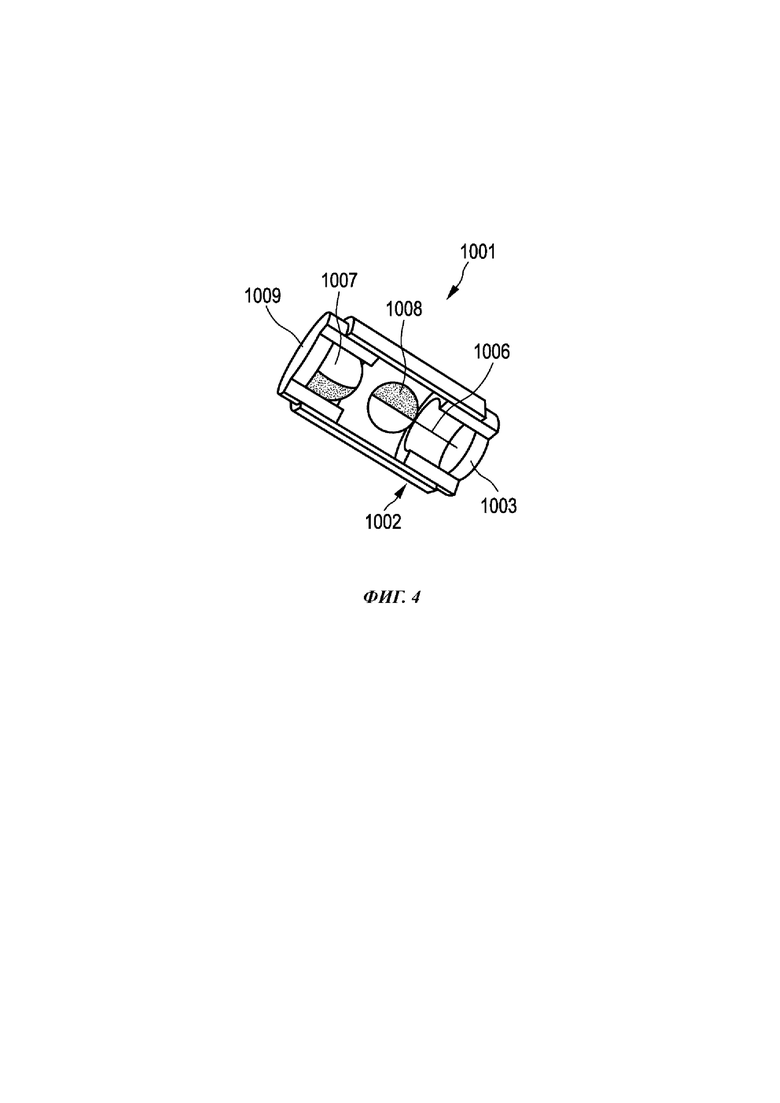
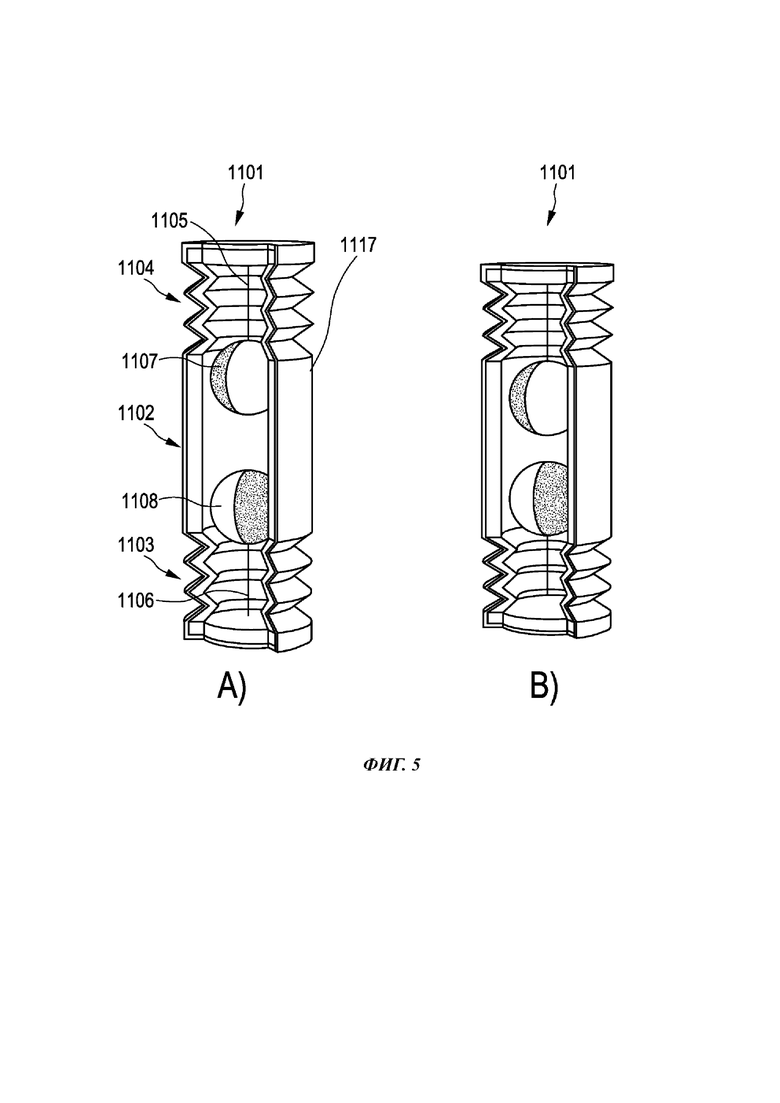
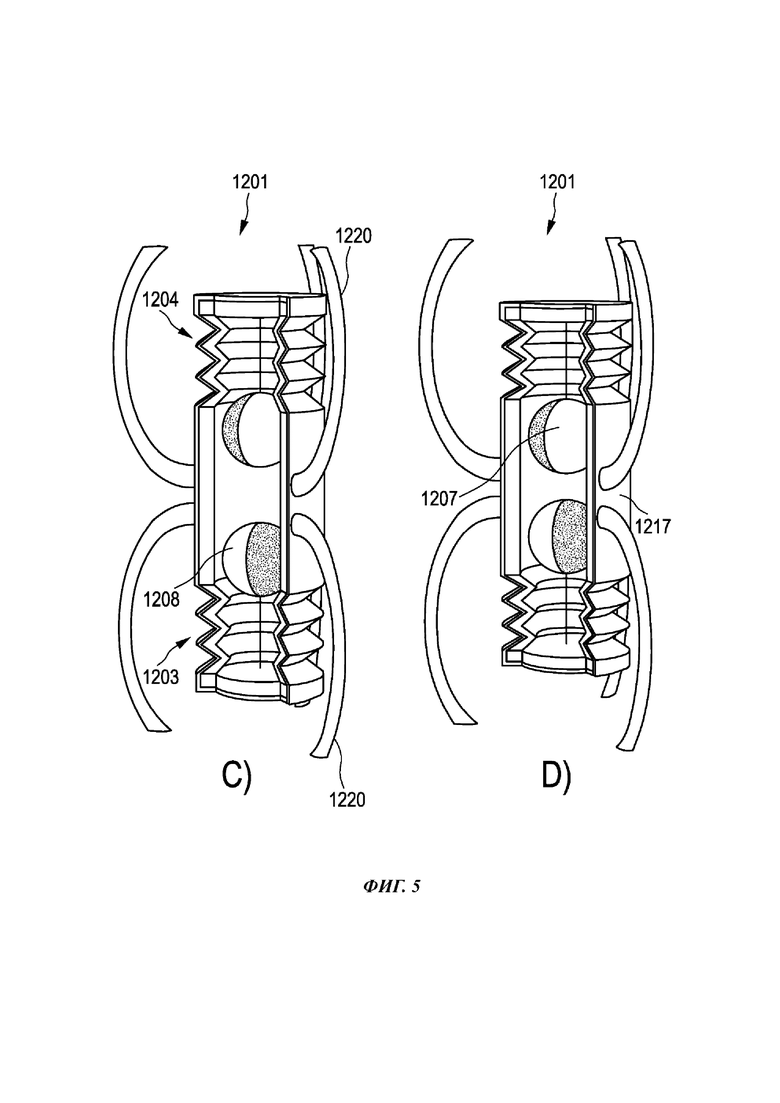
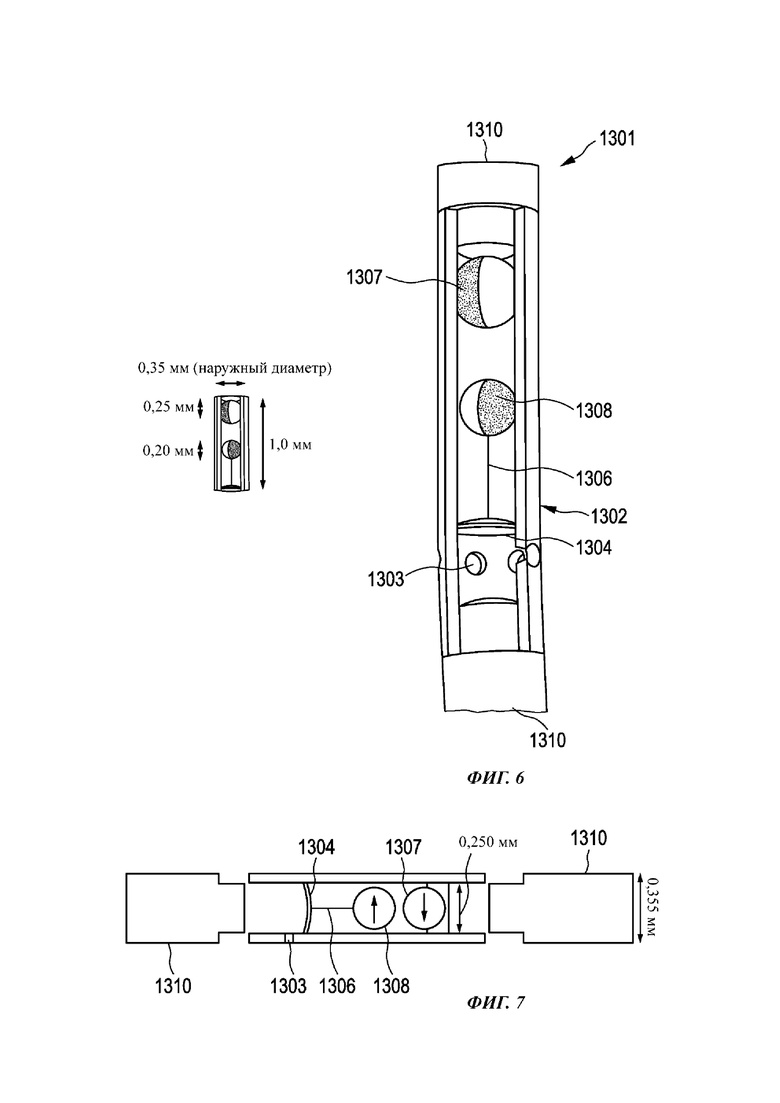
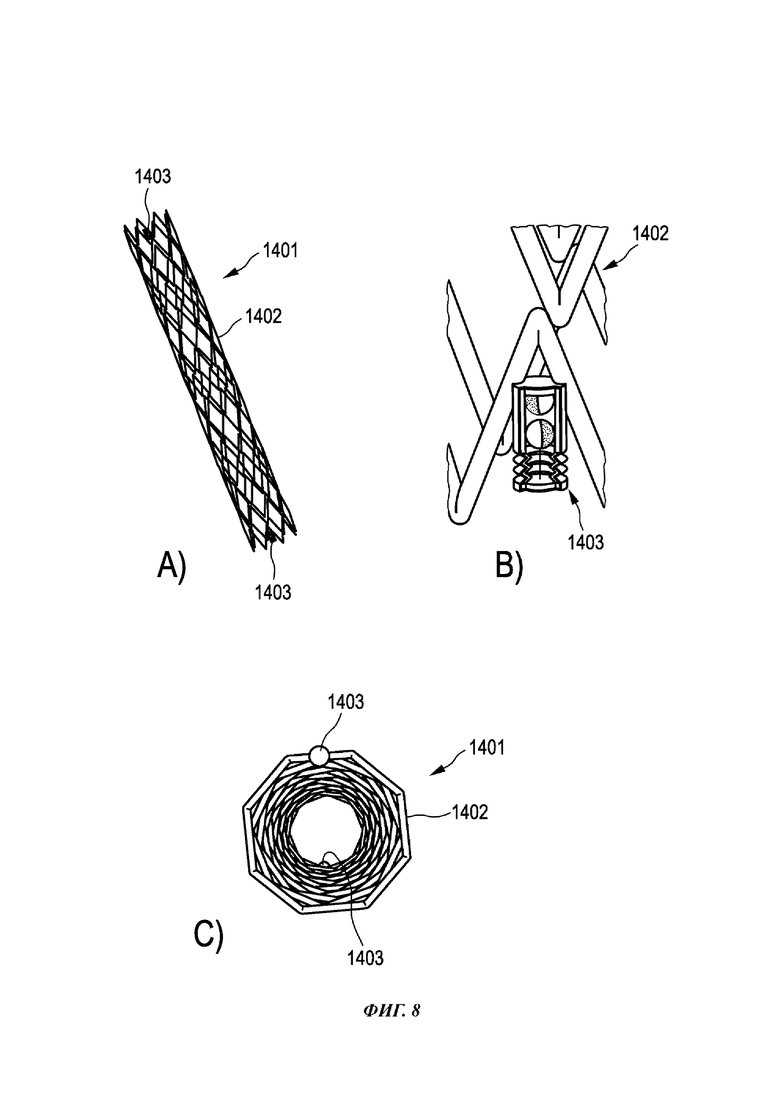
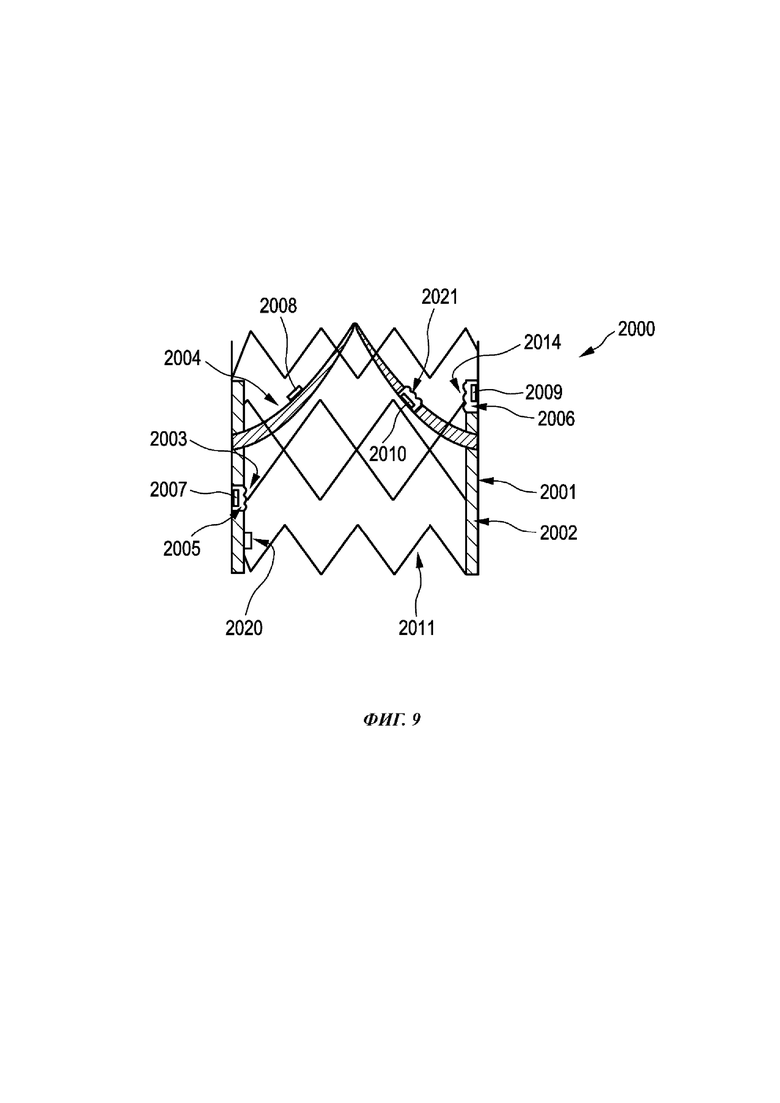
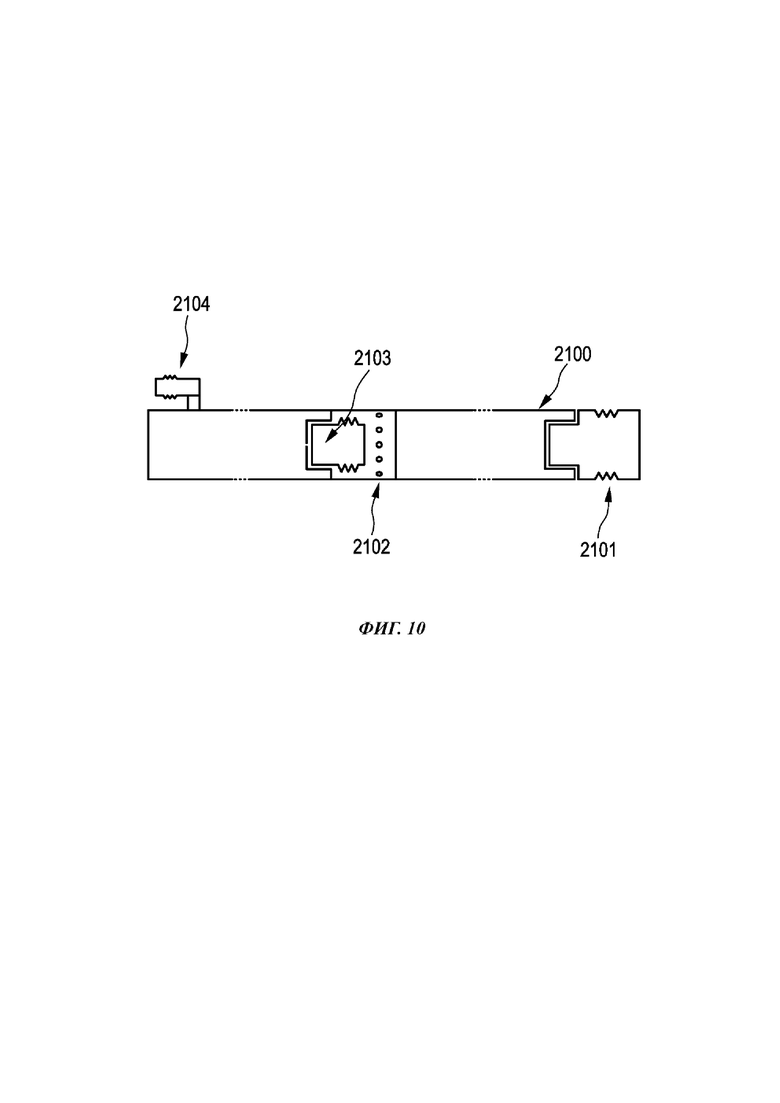
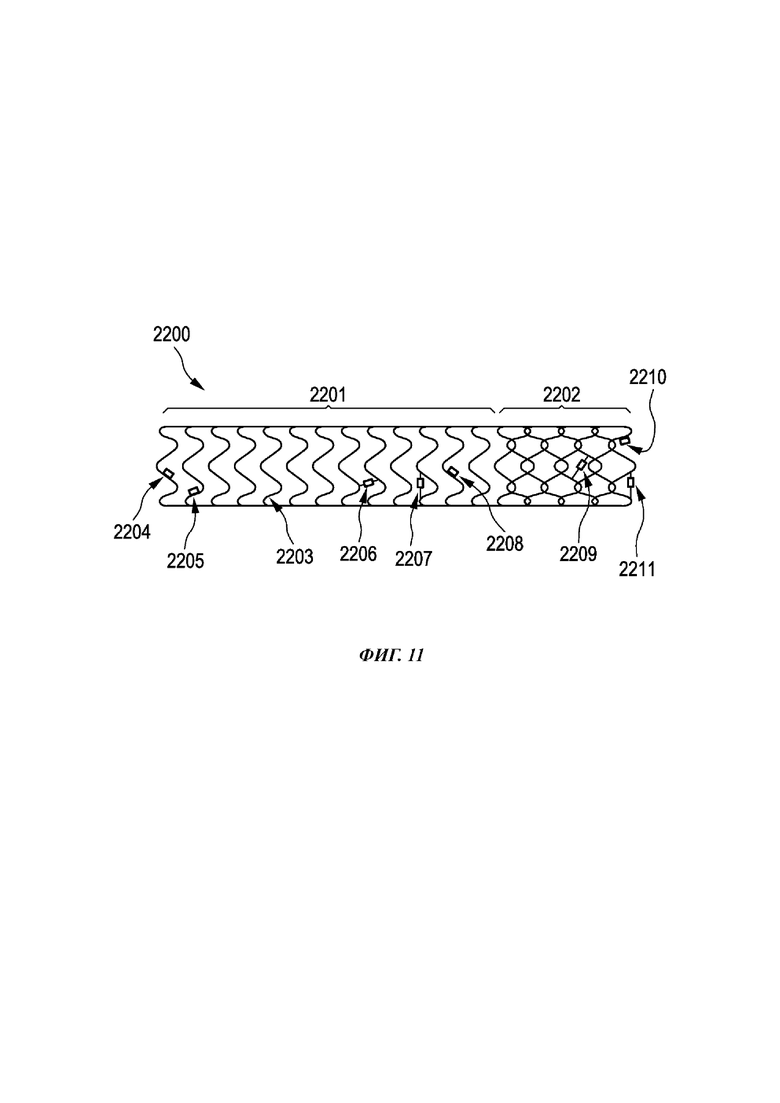
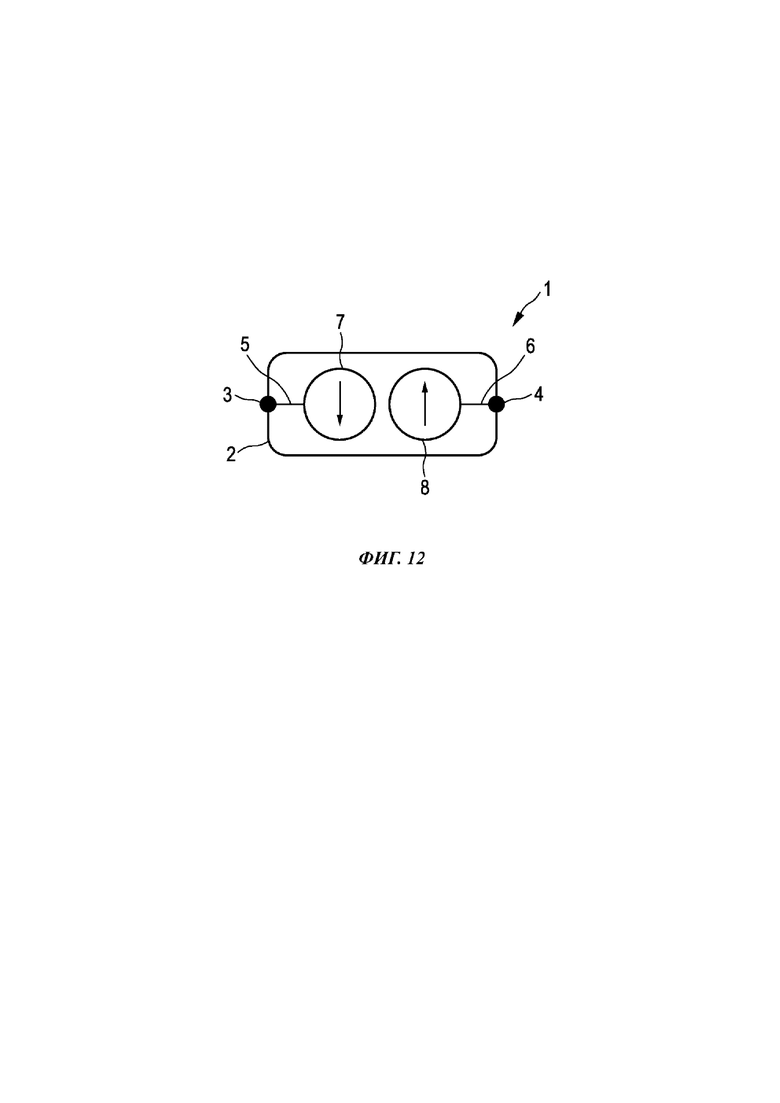
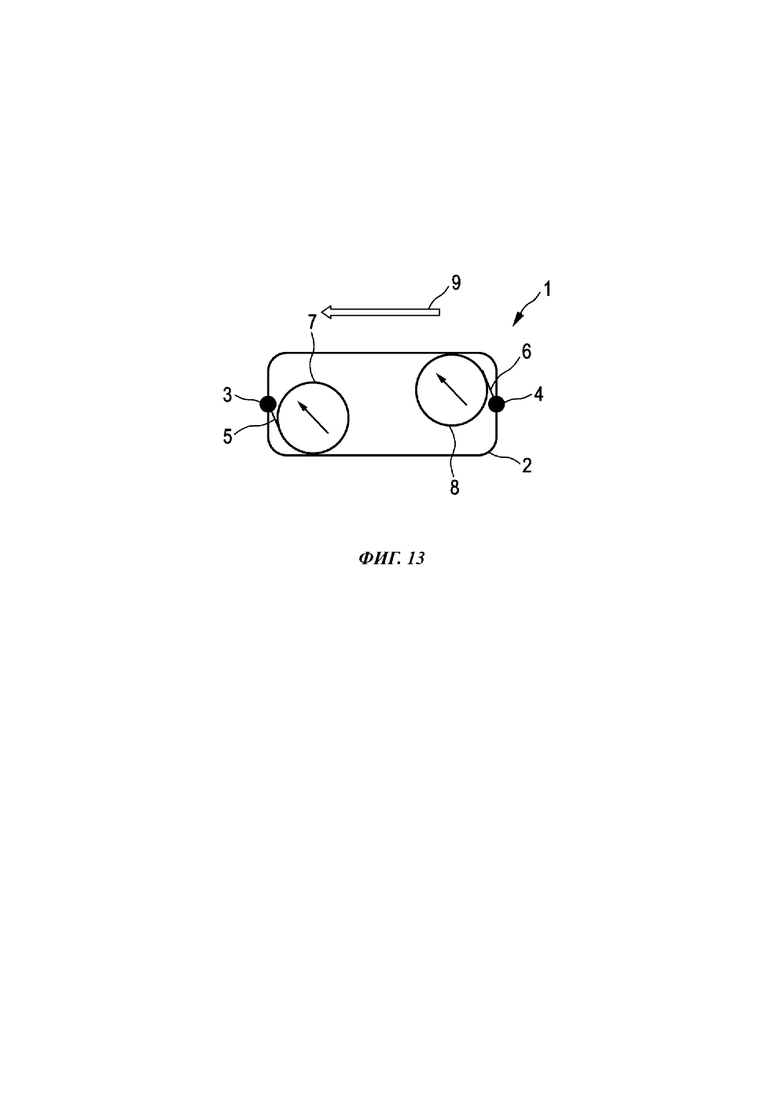
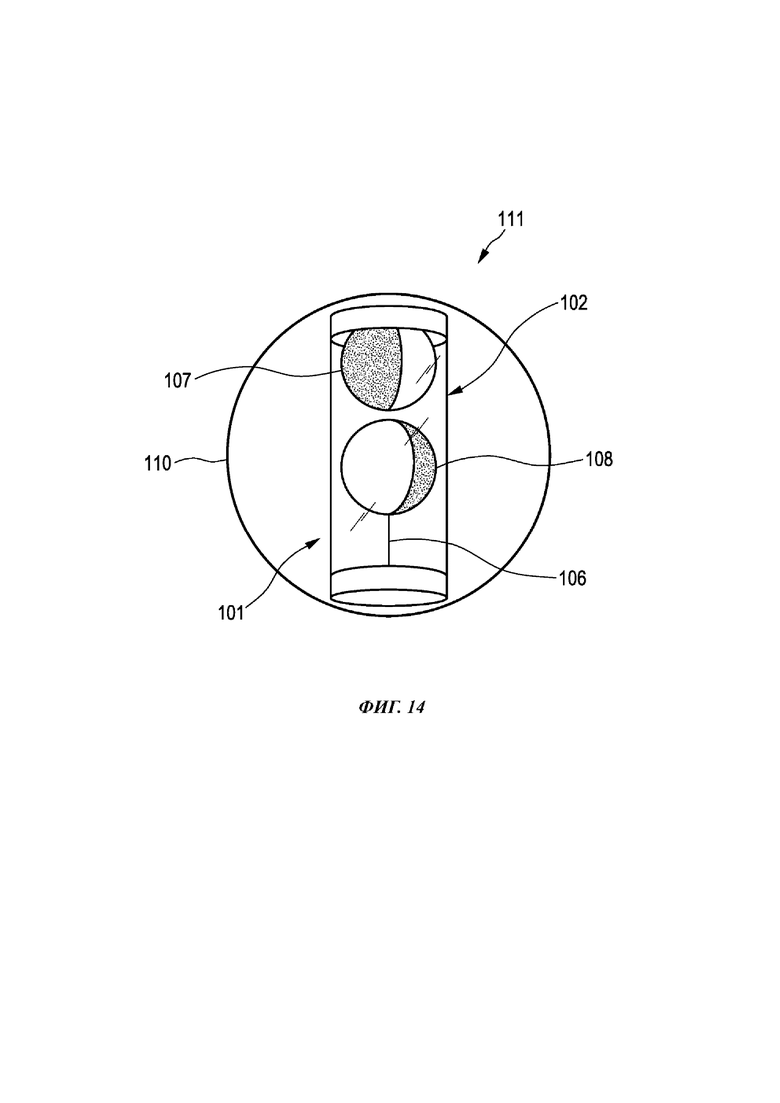
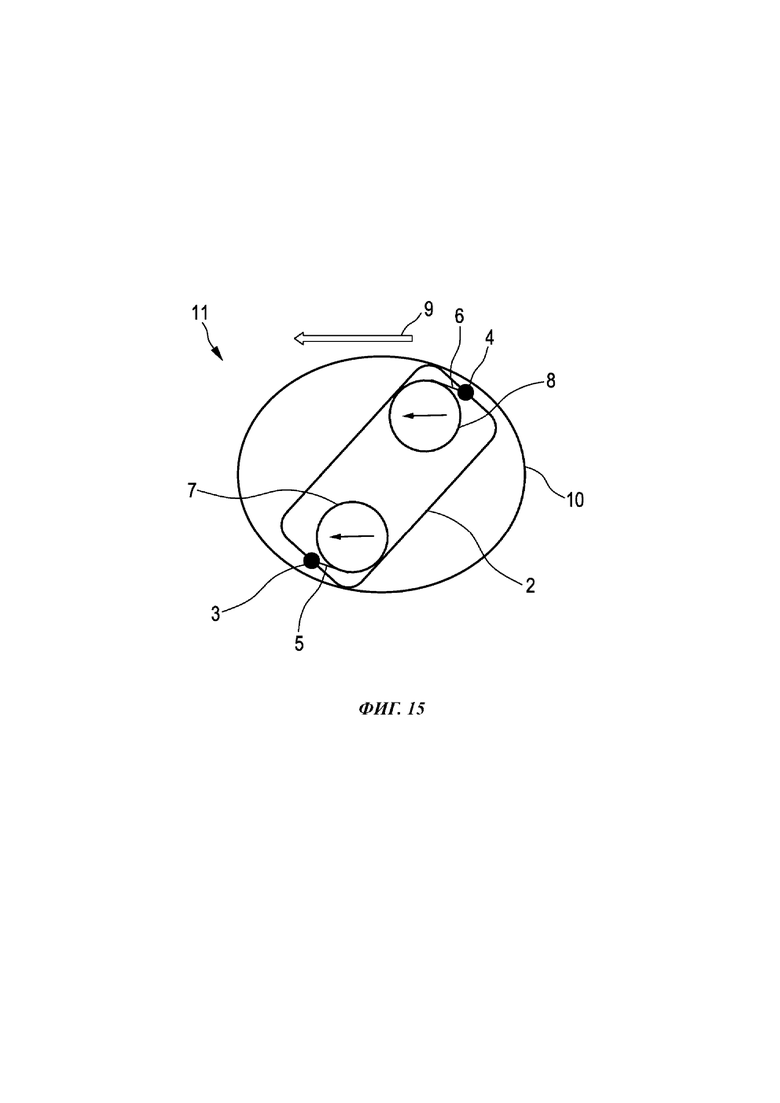
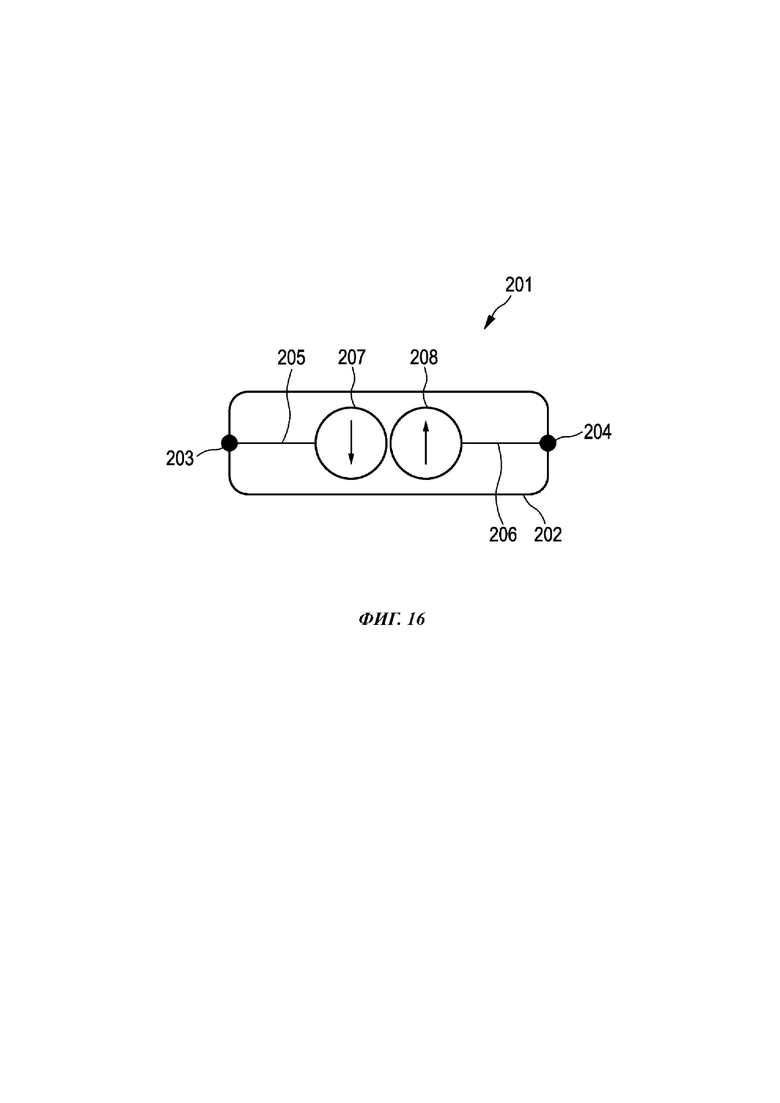
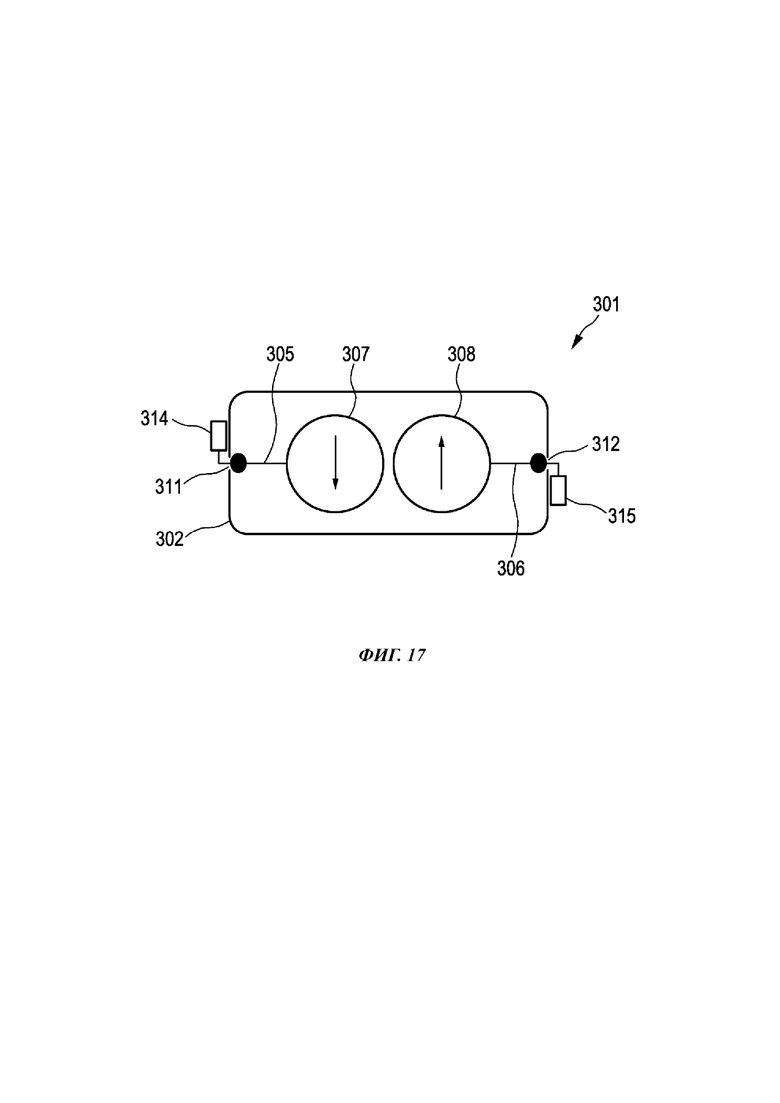
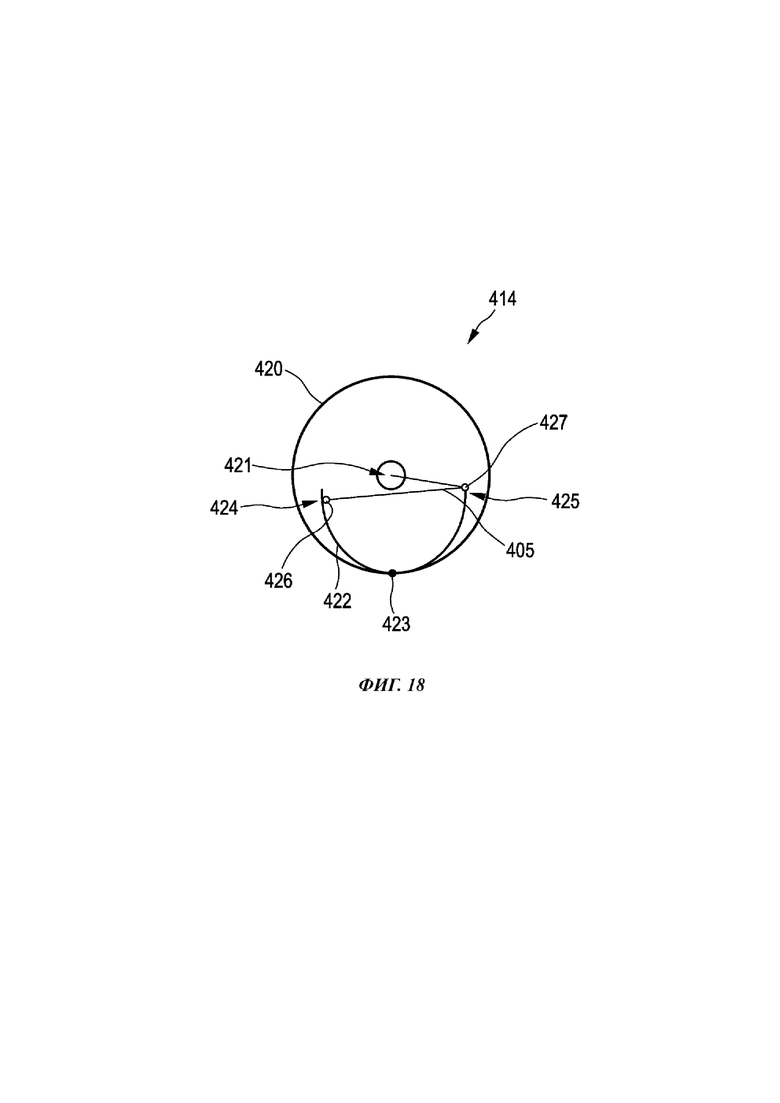
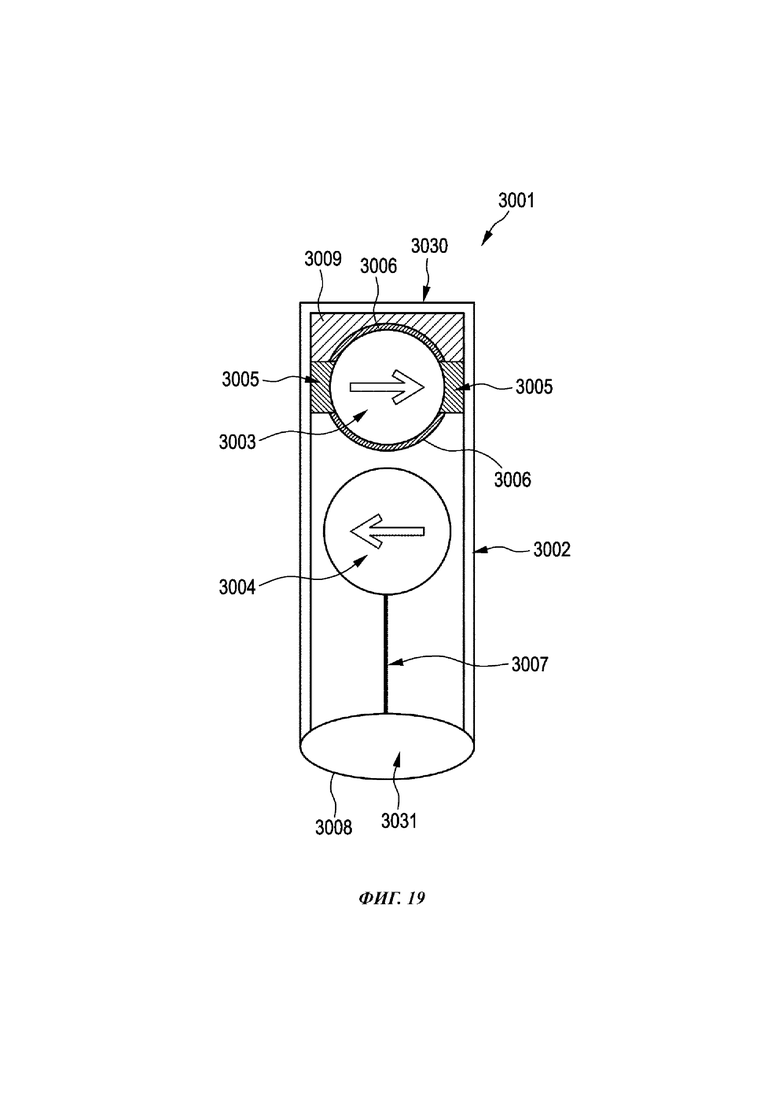
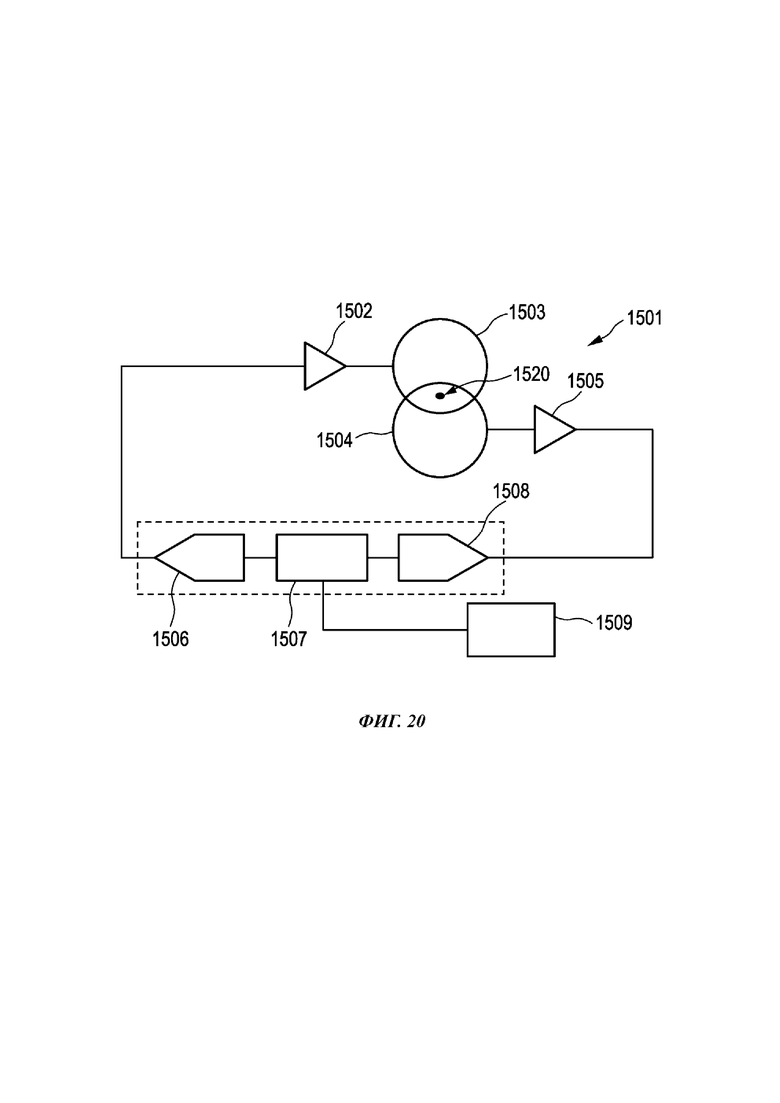
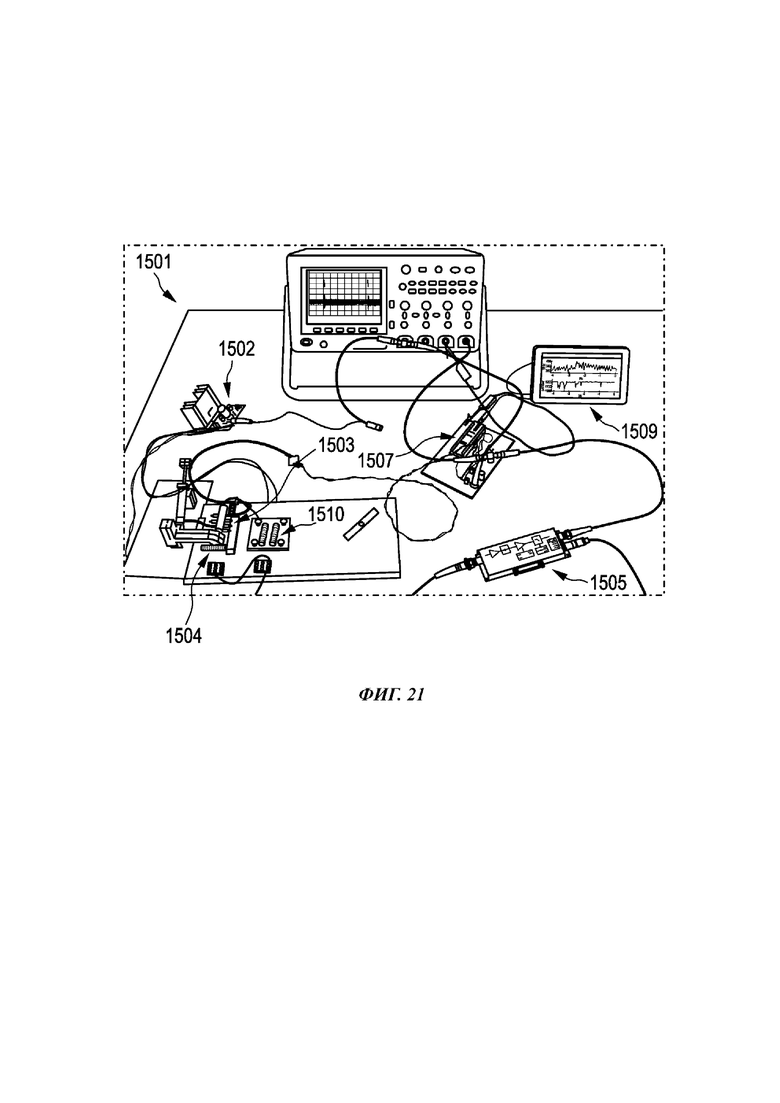
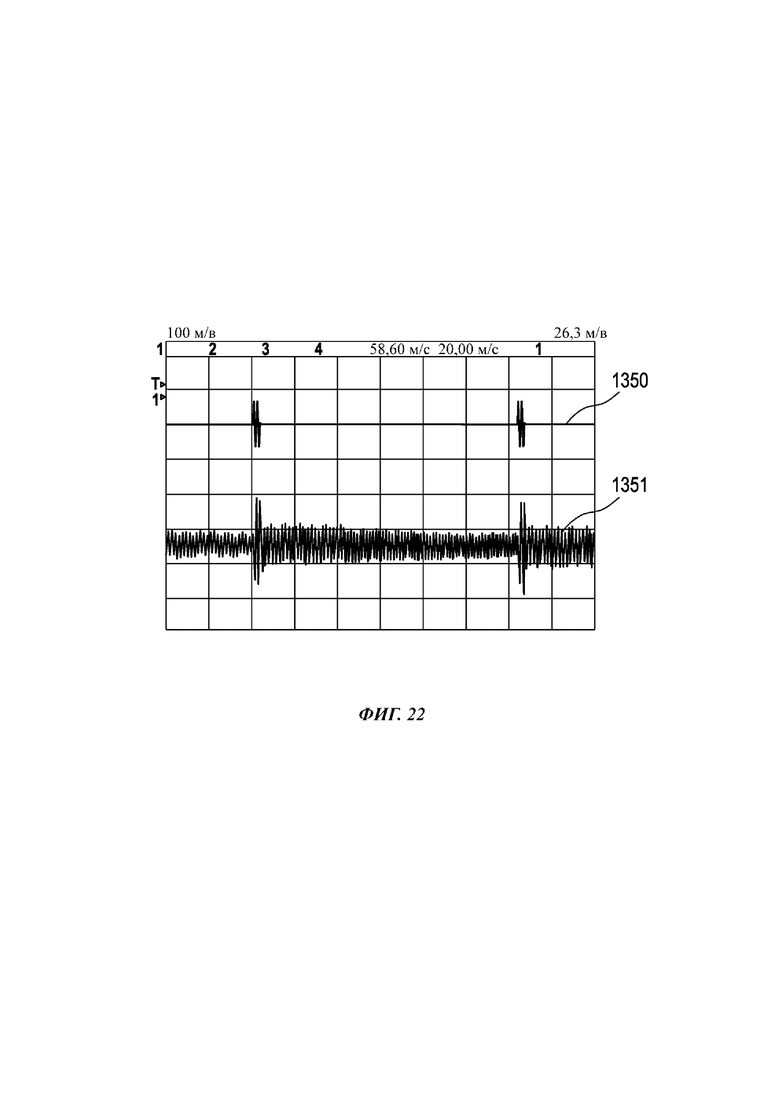
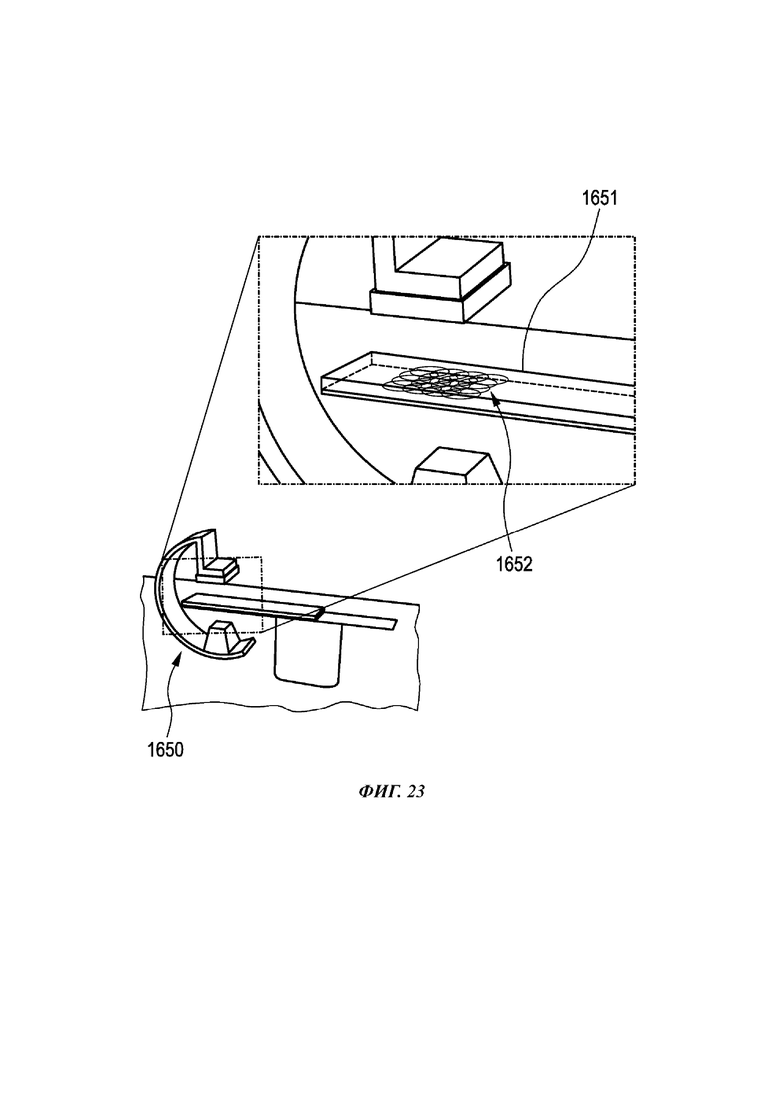
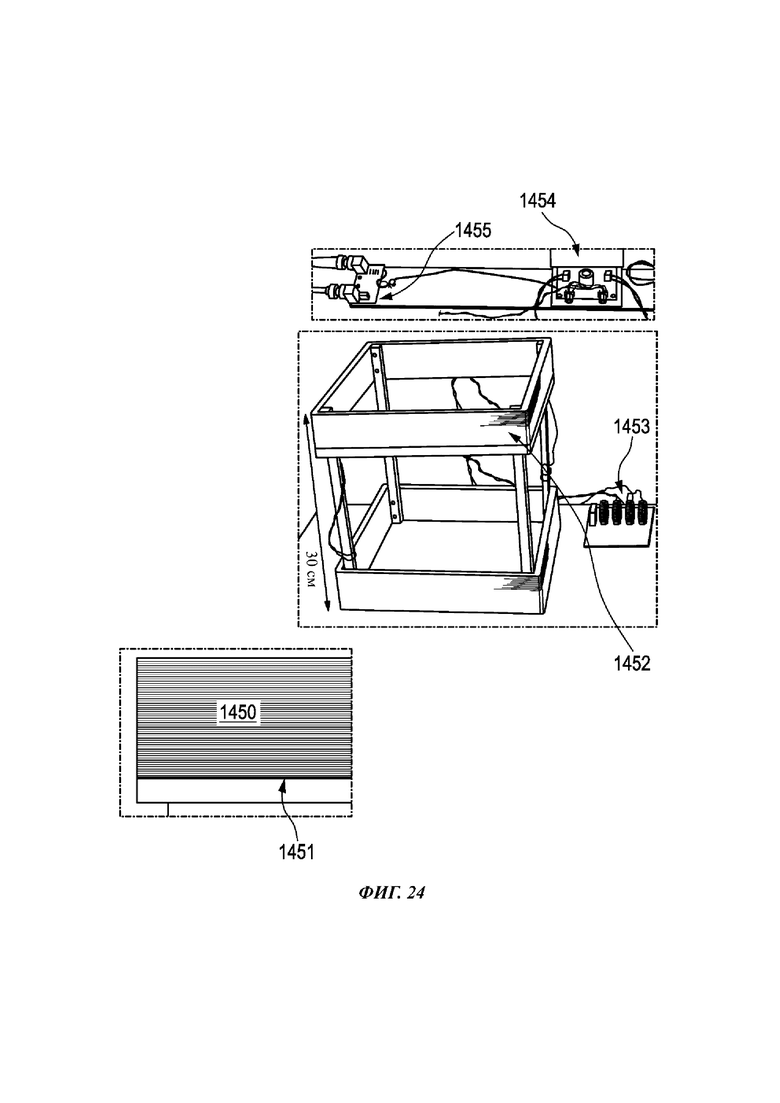
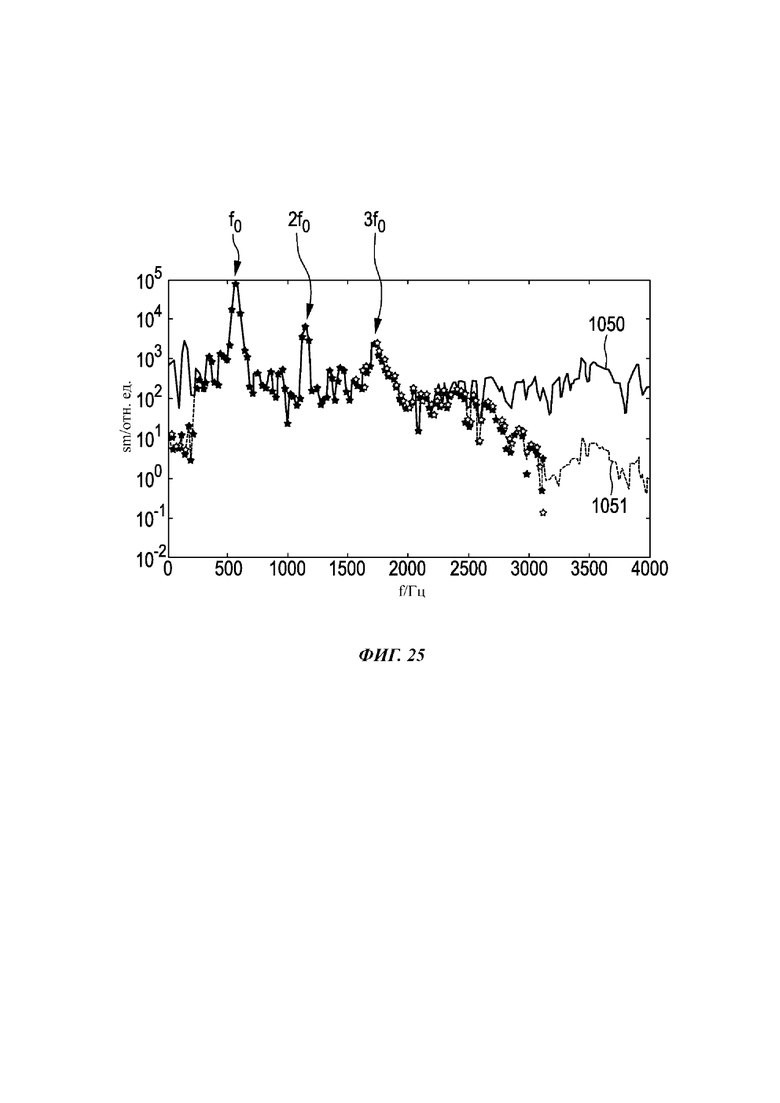
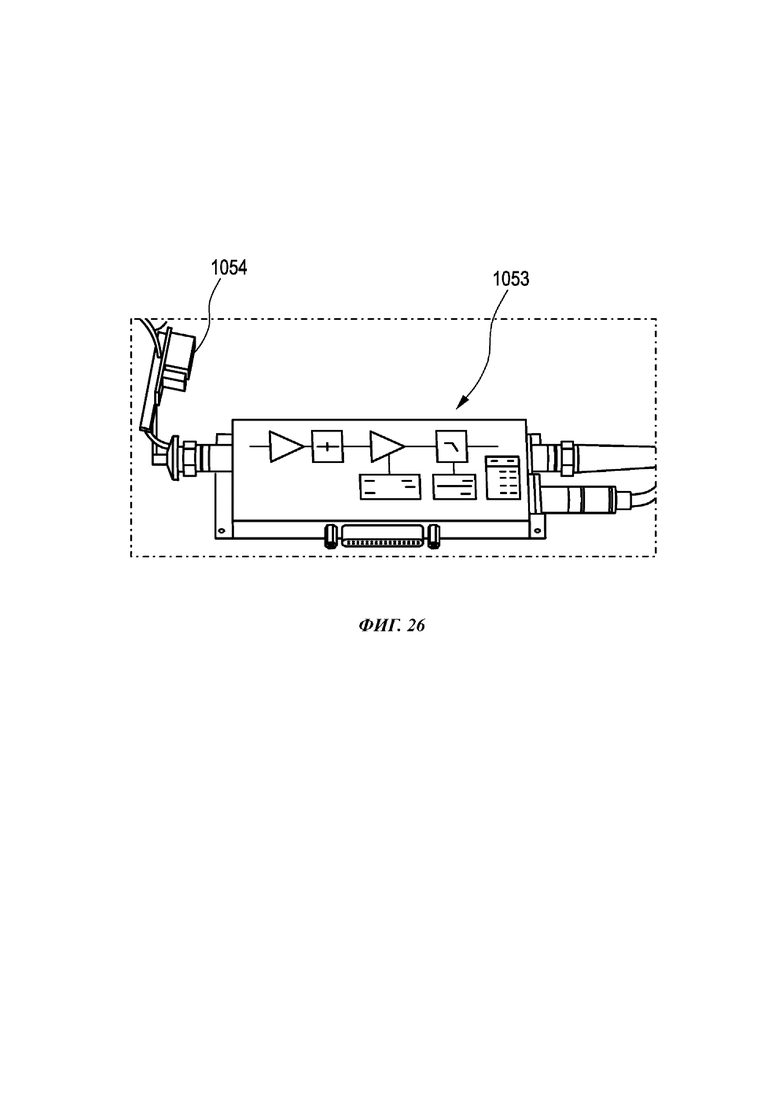
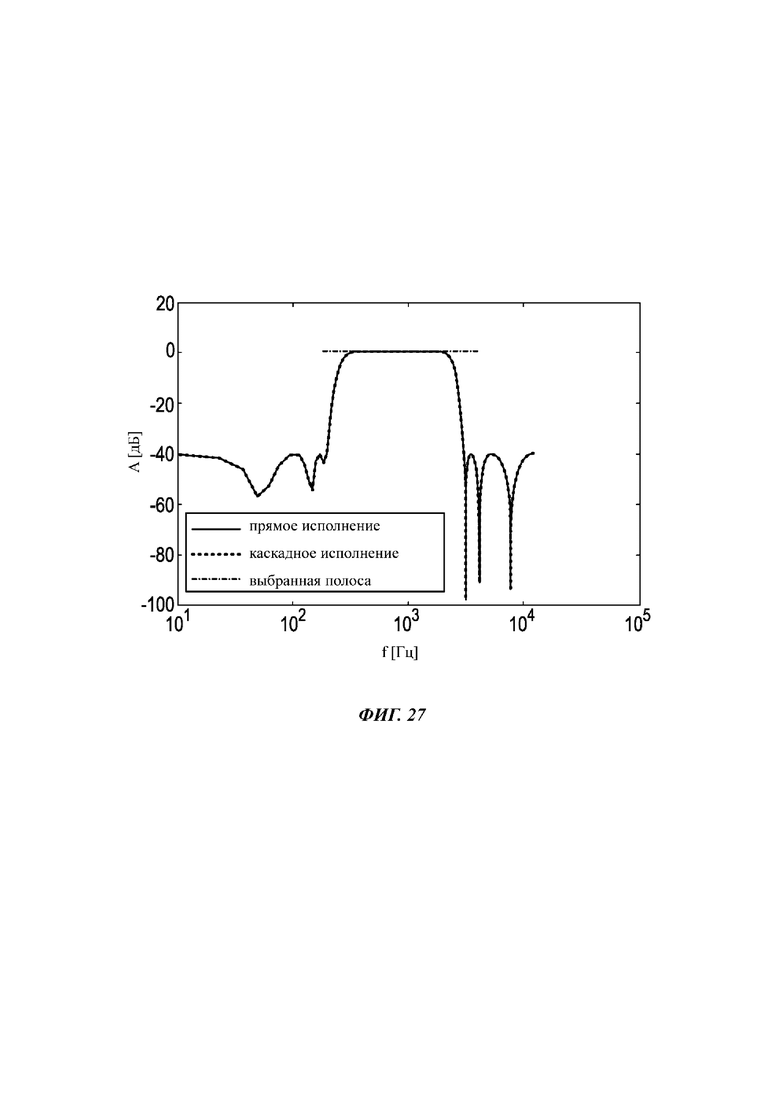
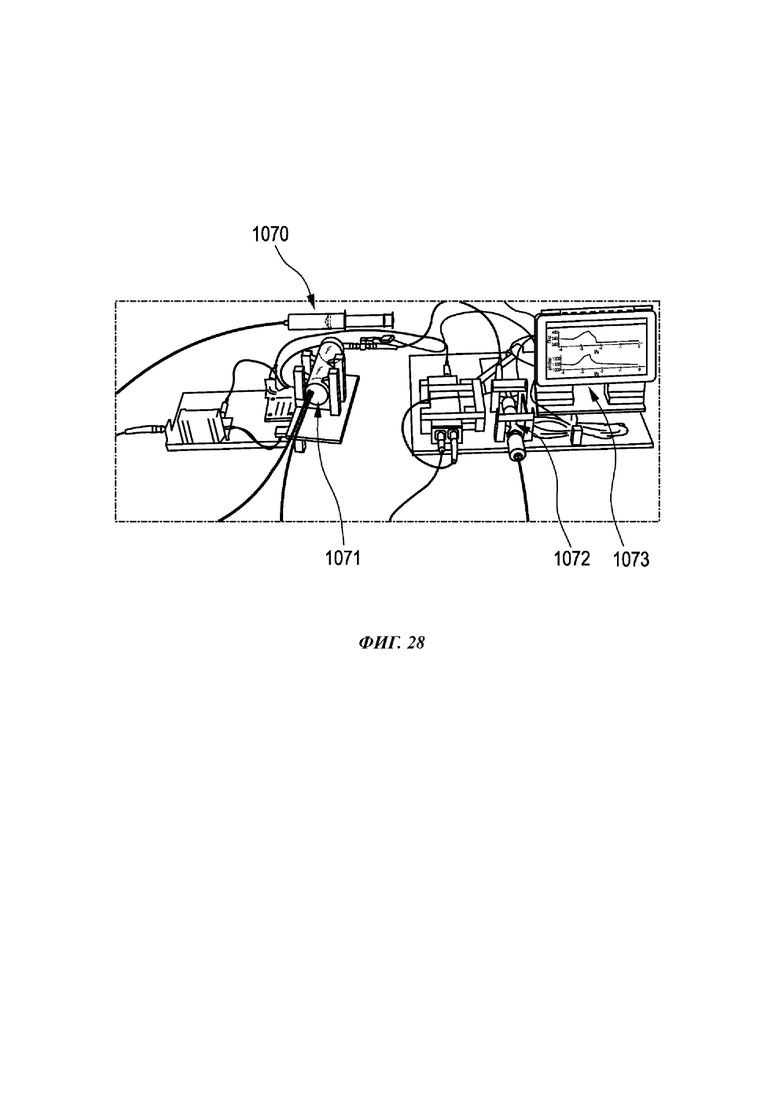
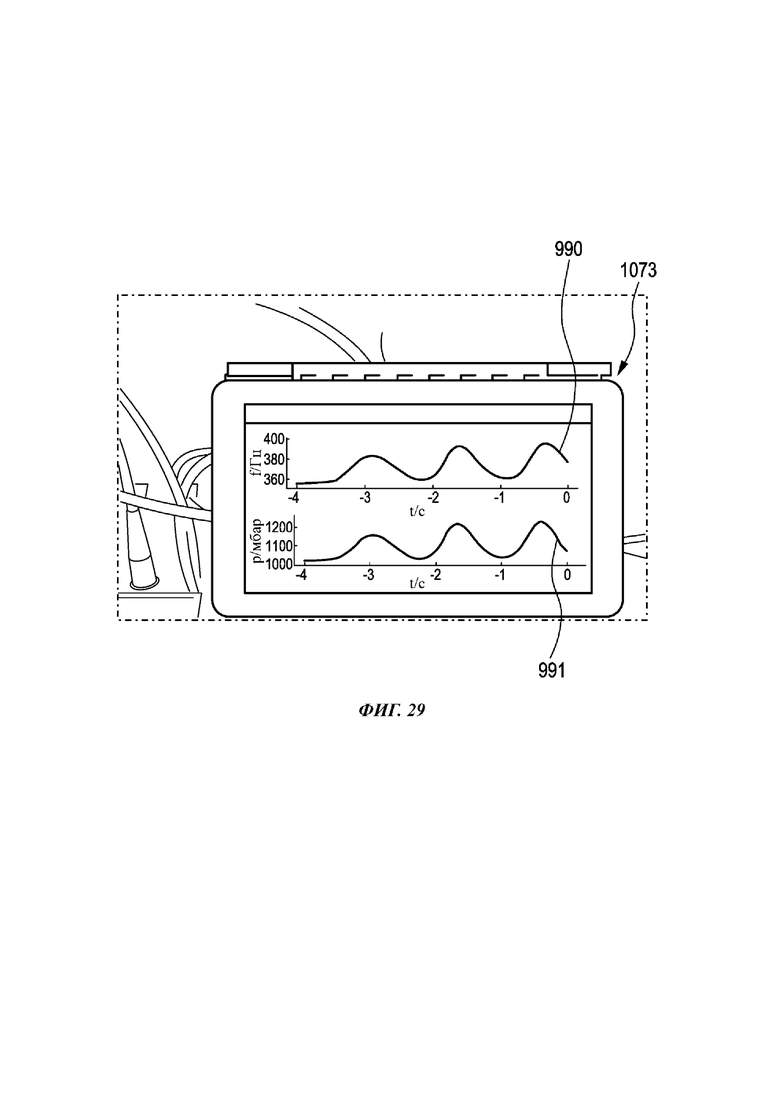
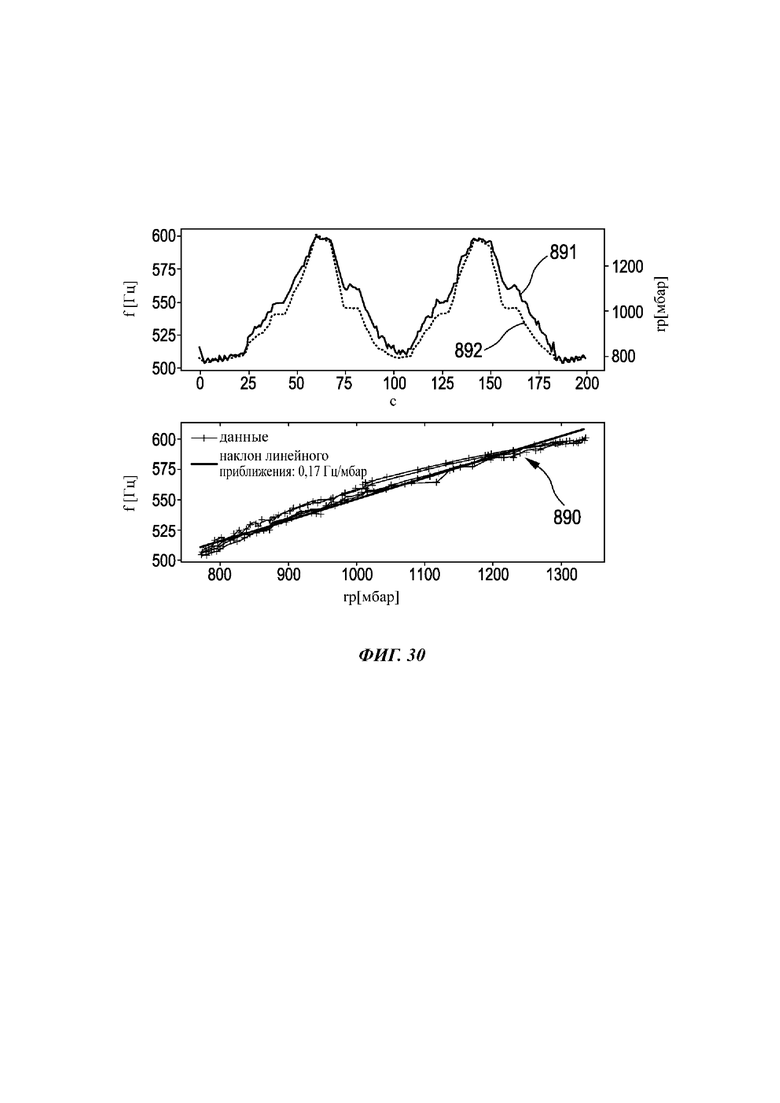
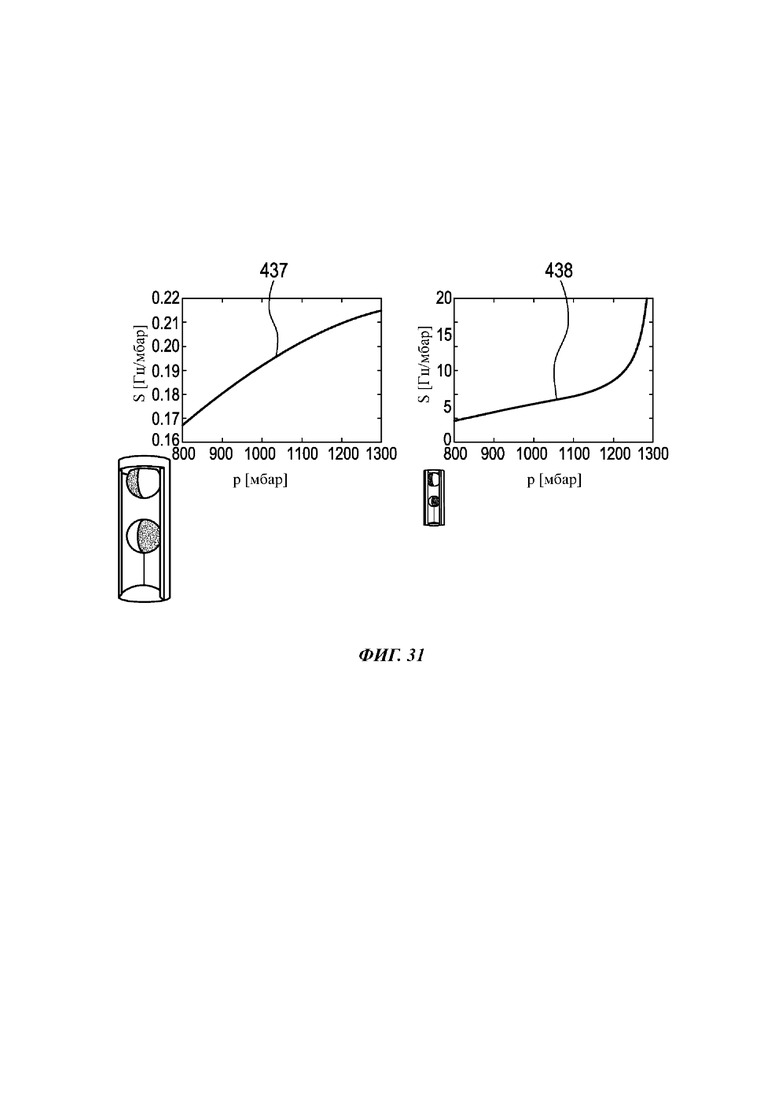
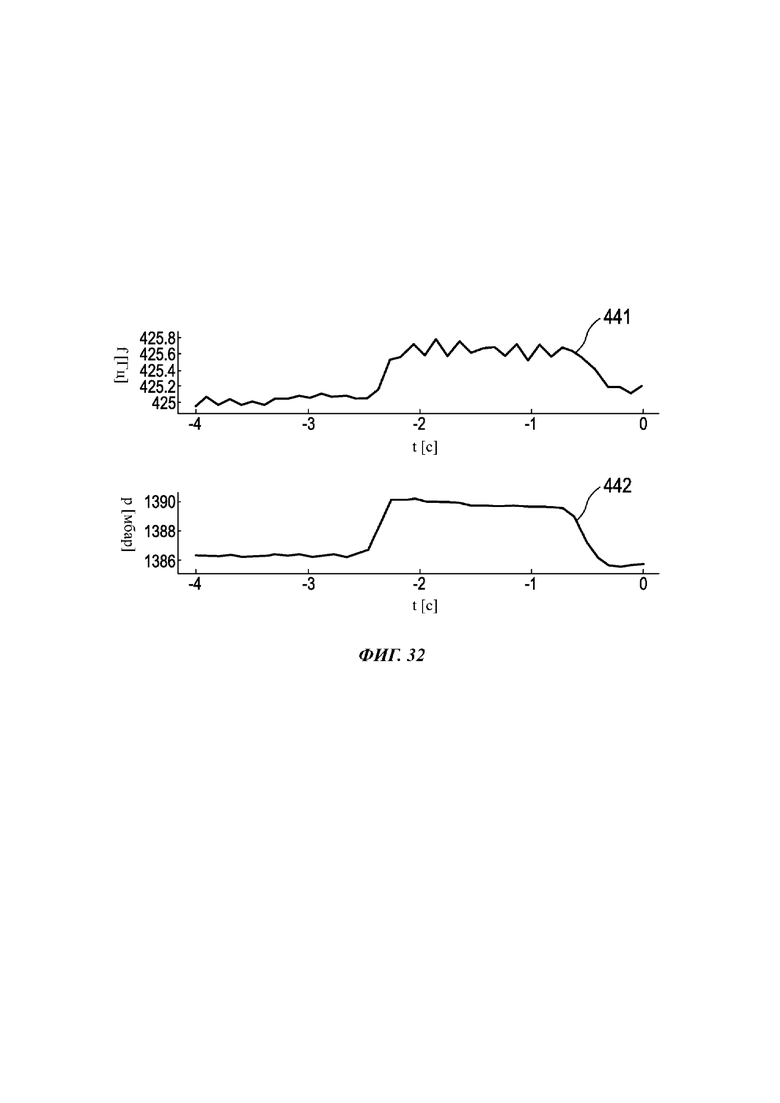
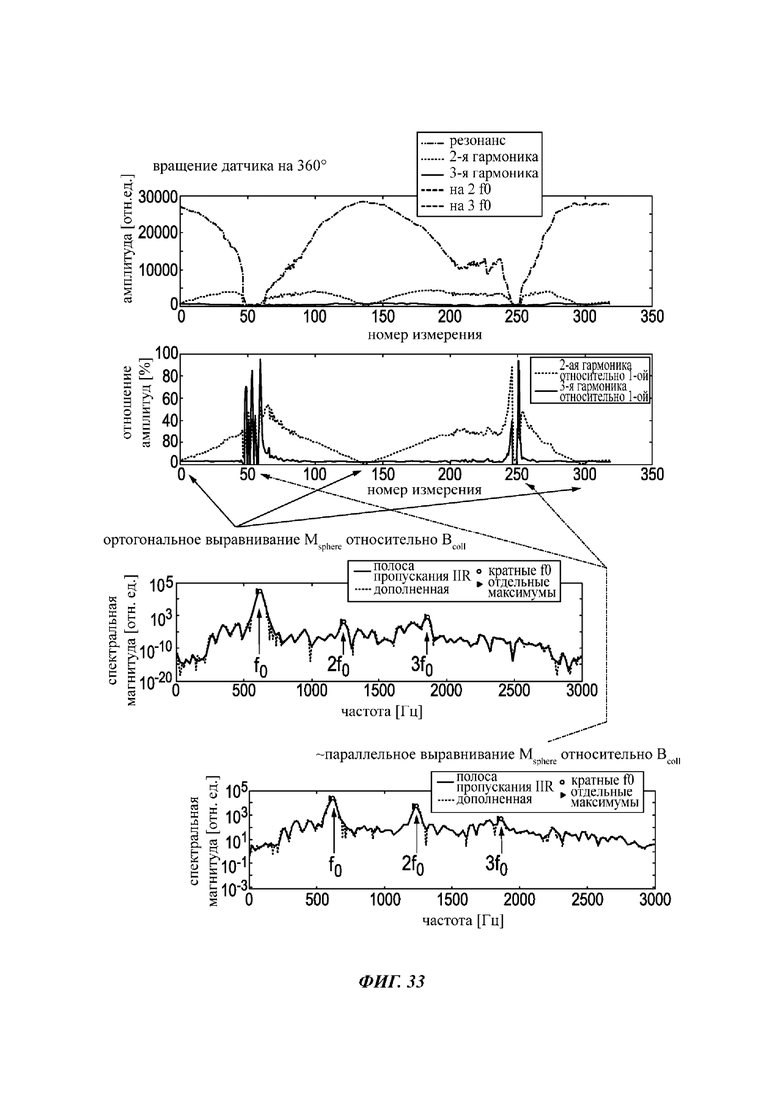
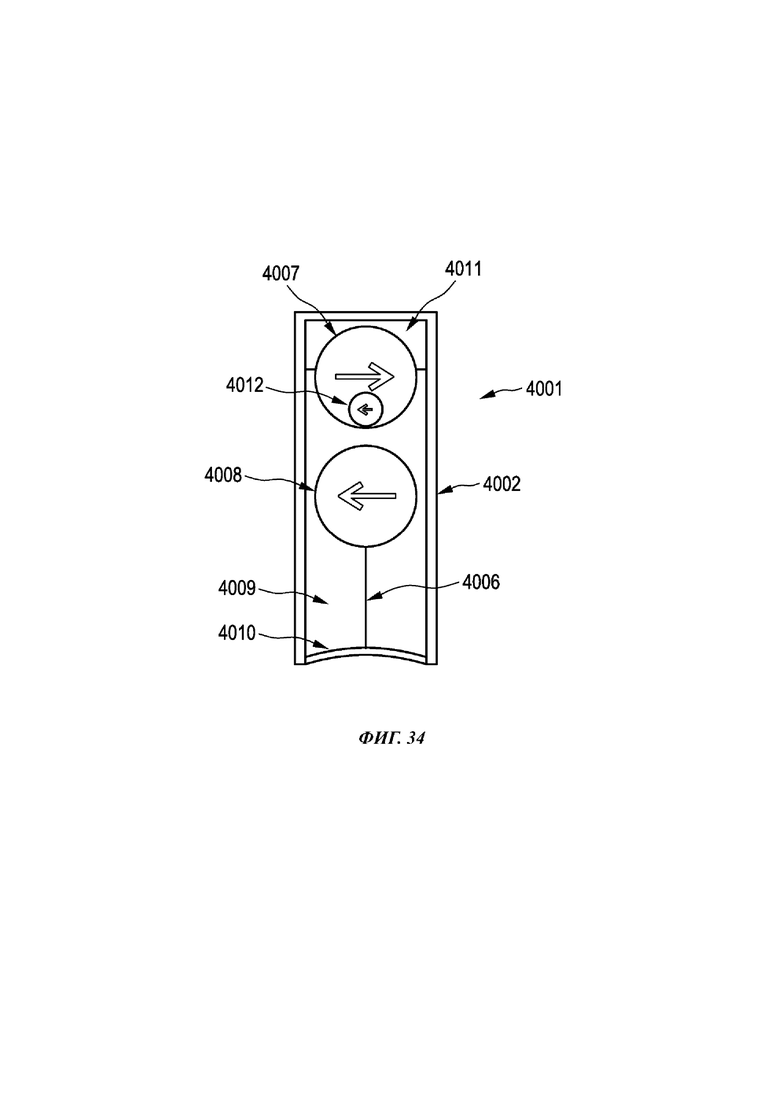
Группа изобретений относится к медицине, а именно к датчику давления для введения в систему кровообращения человека, способу измерения давления, имплантируемому медицинскому устройству и системе считывания показаний датчика давления. Датчик давления представляет собой пассивный датчик и содержит корпус, магнитомеханический генератор колебаний, блок восстановления крутящего момента. Корпус содержит блокирующий диффузию слой, покрывающий часть корпуса и выполненный с возможностью поддержания предварительно заданного давления внутри корпуса. Генератор колебаний предназначен для преобразования внешнего магнитного или электромагнитного поля возбуждения в механическое колебание магнитного объекта и содержит магнитный объект, обеспечивающий постоянный магнитный момент внутри корпуса. Часть корпуса является гибкой для обеспечения возможности преобразования изменений внешнего давления в изменения механического колебания магнитного объекта. Магнитный объект расположен внутри корпуса таким образом, что он может поворачиваться за пределы равновесной ориентации, если на магнитный объект действует внешнее магнитное или электромагнитное поле возбуждения. Блок восстановления крутящего момента содержит дополнительный магнитный объект для создания магнитного поля в таком положении магнитного объекта, чтобы он обеспечивал восстанавливающий крутящий момент. Блок восстановления крутящего момента выполнен с возможностью обеспечения восстанавливающего крутящего момента, чтобы вернуть магнитный объект в равновесную ориентацию. Датчик давления выполнен таким образом, что изменения внешнего давления могут быть преобразованы в изменения резонансной частоты. Имплантируемое медицинское устройство содержит датчик давления. Система считывания содержит генератор поля, преобразователь, процессор и предназначена для беспроводного считывания показаний датчика давления. Генератор поля предназначен для генерации магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта датчика давления. Преобразователь предназначен для преобразования магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика. Процессор предназначен для определения значения давления на основе электрических сигналов отклика. Процессор выполнен с возможностью применения алгоритма компенсации, чтобы корректировать определение значения давления для зависимости электрических сигналов отклика от расстояния между датчиком давления и генератором поля, фазы механического колебания магнитного объекта, ориентации корпуса относительно системы считывания, амплитуды механического колебания магнитного объекта. При исполнении способа генерируют поле возбуждения для индуцирования механических колебаний магнитного объекта датчика давления. Преобразуют поле в сигналы отклика. Определяют значение давления на основе электрических сигналов отклика. Обеспечивается датчик для измерения давления для введения в систему кровообращения человека, повышение точности измерения давления с помощью такого датчика. 5 н. и 10 з.п. ф-лы, 34 ил.
1. Датчик давления для введения в систему кровообращения человека, при этом датчик давления представляет собой пассивный датчик,
выполненный с возможностью беспроводного считывания его показаний системой считывания, размещенной вне человека,
при этом датчик давления дополнительно содержит корпус, содержащий блокирующий диффузию слой, покрывающий по меньшей мере часть корпуса и выполненный с возможностью поддержания предварительно заданного давления внутри корпуса,
причем датчик давления дополнительно содержит магнитомеханический генератор колебаний, содержащий магнитный объект, обеспечивающий постоянный магнитный момент внутри корпуса, при этом магнитомеханический генератор колебаний выполнен с возможностью преобразования внешнего магнитного или электромагнитного поля возбуждения в механическое колебание магнитного объекта,
причем по меньшей мере часть корпуса является гибкой для обеспечения возможности преобразования изменений внешнего давления в изменения механического колебания магнитного объекта,
причем магнитный объект расположен внутри корпуса таким образом, что он может поворачиваться за пределы равновесной ориентации, если на магнитный объект действует внешнее магнитное или электромагнитное поле возбуждения, при этом датчик давления дополнительно содержит:
блок восстановления крутящего момента, содержащий дополнительный магнитный объект для создания магнитного поля в таком положении магнитного объекта, чтобы он обеспечивал восстанавливающий крутящий момент, причем блок восстановления крутящего момента выполнен с возможностью обеспечения восстанавливающего крутящего момента, чтобы вернуть магнитный объект в равновесную ориентацию,
при этом датчик давления выполнен таким образом, что изменения внешнего давления могут быть преобразованы в изменения резонансной частоты.
2. Датчик давления по п. 1, в котором гибкая часть корпуса содержит сильфон для преобразования изменений внешнего давления в изменения по меньшей мере амплитуды или резонансной частоты механического колебания магнитного объекта.
3. Датчик давления по п. 2, дополнительно содержащий внешний чехол поверх сильфона.
4. Датчик давления по любому из предшествующих пунктов, в котором блокирующий диффузию слой содержит благородный металл, или титан, или металл, на который нанесено биосовместимое покрытие.
5. Датчик давления по любому из предшествующих пунктов, содержащий внешний проволочный каркас, прикрепленный к внешней части корпуса для обеспечения возможности сохранения расстояния от внешней части корпуса до стенки сосуда.
6. Датчик давления по любому из предшествующих пунктов, в котором магнитный объект и/или внутренняя часть корпуса покрыты скользким и нелипким материалом.
7. Датчик давления по любому из предшествующих пунктов, сконструированный таким образом, чтобы магнитный объект мог быть выровнен с внешним магнитным полем независимо от положения и ориентации датчика давления во внешнем магнитном поле.
8. Датчик давления по п. 7, содержащий внешний кожух, охватывающий корпус, причем корпус выполнен с возможностью поворота внутри охватывающего кожуха, причем датчик давления выполнен таким образом, что изменения внешнего давления за пределами охватывающего кожуха могут быть преобразованы в изменения внешнего давления, происходящие снаружи корпуса и внутри охватывающего кожуха.
9. Датчик давления по любому из пп. 7 и 8, в котором магнитный объект представляет собой магнитную сферу, которая прикреплена к одному концу нити, при этом
либо другой конец нити прикреплен к внутренней части корпуса, при этом нить имеет длину, составляющую по меньшей мере Пи/4 диаметра магнитной сферы,
либо другой конец нити прикреплен к блоку изменения длины, выполненному с возможностью изменения длины нити и прикрепленному к внутренней части корпуса.
10. Датчик давления по любому из предшествующих пунктов, выполненный с возможностью компенсации зависимости резонансной частоты от температуры.
11. Датчик давления по п. 10, содержащий компенсационный элемент, выполненный с возможностью изменения резонансной частоты в первом частотном направлении в зависимости от изменения температуры, которое противоположно второму частотному направлению, в котором резонансная частота датчика давления была бы изменена в зависимости от изменения температуры, если бы компенсационный элемент не был частью датчика давления.
12. Имплантируемое медицинское устройство, содержащее датчик давления по любому из пп. 1-11, которое предпочтительно представляет собой одно из следующего: печеночное шунтирующее устройство, проволоку для лечения аневризмы головного мозга, искусственный сердечный клапан или стент.
13. Система считывания для беспроводного считывания показаний датчика давления по любому из пп. 1-11, содержащая:
- генератор поля для генерации магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта датчика давления,
- преобразователь для преобразования магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика,
- процессор для определения значения давления на основе электрических сигналов отклика, причем процессор выполнен с возможностью применения алгоритма компенсации, чтобы корректировать определение значения давления для зависимости электрических сигналов отклика по меньшей мере от одного из следующего:
a) расстояние между датчиком давления и генератором поля;
b) фаза механического колебания магнитного объекта;
c) ориентация корпуса относительно системы считывания; и
d) амплитуда механического колебания магнитного объекта.
14. Способ измерения давления для выполнения измерения с использованием датчика давления по любому из пп. 1-11,
при этом способ измерения давления содержит этапы:
- генерирование магнитного или электромагнитного поля возбуждения для индуцирования механических колебаний магнитного объекта датчика давления,
- преобразование магнитного или электромагнитного поля, генерируемого индуцированными механическими колебаниями магнитного объекта датчика давления, в электрические сигналы отклика,
- определение значения давления на основе электрических сигналов отклика, причем на этапе определения значение давления корректируют для зависимости электрических сигналов отклика по меньшей мере от одного из следующего:
a) расстояние между датчиком давления и генератором поля;
b) фаза механического колебания магнитного объекта;
c) ориентация корпуса относительно системы считывания; и
d) амплитуда механического колебания магнитного объекта.
15. Долговременный носитель, содержащий компьютерную программу, содержащую программный код, предназначенный для побуждения системы (1501) считывания по п. 13 выполнять этапы способа измерения давления по п. 14, когда компьютерная программа выполняется на компьютере, управляющем системой (1501) считывания.
| ИМПЛАНТИРУЕМАЯ СИСТЕМА ШУНТА И СВЯЗАННЫЕ С НЕЙ ДАТЧИКИ ДАВЛЕНИЯ | 2012 |
|
RU2574372C2 |
| US 2007236213 A1, 11.10.2007 | |||
| Способ и устройство для предохранения поросят от удушья под свиноматкой в загоне для выращивания молодняка | 1982 |
|
SU1181515A3 |
| US 2011201984 A1, 18.08.2011 | |||
| US 2011201984 A1, 18.08.2011 | |||
| US 2015126829 A1, 07.05.2015. | |||
