Изобретение относится к планетарным винтовым передачам, преобразующим вращательное движение в поступательное, и может использоваться в линейных приводах, особенно в механизмах, где требуется точное перемещение и позиционирование, таких как прецизионные металлорежущие станки, механизмы наведения оптических и других приборов, стволов орудий, приводы регулируемых клапанов и задвижек и т.п.
Для преобразования вращательного движения в поступательное наиболее широко используются передачи винт - гайка. Передача винт-гайка в самом общем случае содержит два звена: винт и гайку, соприкасающиеся винтовыми поверхностями (А.Ф. Крайнев Словарь - справочник по механизмам, М. «Машиностроение» 1987, с. 49). Одно из звеньев связывают со стойкой, тогда другое звено при вращении перемещается поступательно. При простоте конструкции такой механизм имеет недостаточную для ряда применений точность позиционирования, так как шаг линейного перемещения зависит (равен?) от шага резьбы. Уменьшение же шага резьбы ограничено снижением несущей способности передачи.
Точность позиционирования передачи винт-гайка в патенте RU2339858 увеличивают за счет применения предварительной зубчатой пары. В устройстве прецизионного механического позиционирования RU2534854 для той же цели используют две передачи винт-гайка с различным шагом и направлением резьбы, связанных с помощью пары зубчатых колес внешнего зацепления. В обоих решениях значительно увеличиваются габариты, вес и сложность конструкции механизма.
Известна планетарная несоосная (эксцентриковая) передача винт - гайка (см. там же, с. 288, схема а), или SU 1350420), винтовую пару которой мы выбираем за прототип. Винт и гайка винтовой пары этой передачи имеют разные диаметры винтовой резьбы. Оси винта и гайки смещены на некоторое расстояние с помощью эксцентрика и параллельны друг другу. Одна из осей посредством эксцентрика вращается относительно другой. Движение осуществляется благодаря перекатыванию витков гайки по виткам винта или витков винта по виткам гайки. В частности в SU 1350420 описана передача, в которой гайка размещена с возможностью вращения в корпусе с помощью эксцентриковой втулки. Вращение эксцентрика приводит к вращению оси гайки вокруг оси винта, и взаимодействие резьбы винта с резьбой гайки приводит к точному осевому перемещению винта. Шаг линейного перемещения определяется разностью длин контактирующих линий, которая может быть достаточно маленькой. Возможна и обратная схема такой передачи, когда входным звеном может быть и винт, посаженный на внутренний эксцентрик, а выходным, линейно перемещающимся звеном, тогда будет гайка. В этих передачах по сравнению с обычной передачей винт-гайка с таким же шагом резьбы повышена редукция, а, следовательно, и точность позиционирования. Однако возникает и недостаток, обусловленный возможностью проскальзывания резьбы винта по резьбе гайки, что приводит к сбоям в ее работе. Кроме того, дисбаланс и неуравновешенность момента пары сил в резьбовом сопряжении изгибает винт и дополнительно нагружает подшипники. Дисбаланс, вызываемый эксцентричным расположением винта и гайки ограничивает скорость вращения. Ввиду этих недостатков эксцентриковые передачи не получили широкого применения.
Таким образом, задача создания простой и надежной передачи винт - гайка, обладающей малым линейным шагом и высокой точностью позиционирования, остается по-прежнему актуальной.
Техническим результатом изобретения является устранение проскальзывания в винтовой паре, а, следовательно, и повышение работоспособности передачи. Дополнительными техническими результатами, достигаемыми отдельными вариантами изобретения, являются уменьшение линейного шага механизма, и, следовательно, увеличение точности позиционирования, а также устранение дисбаланса.
Для достижения указанного технического результата винтовая пара для эксцентриковой передачи винт-гайка как и прототип, содержит винт и гайку с винтовой резьбой разного диаметра. Оси винта и гайки параллельно смещены друг относительно друга с помощью внутреннего или внешнего эксцентрика и имеют возможность вращаться одна относительно другой.
В отличие от прототипа часть или вся поверхность одной из деталей в винтовой паре выполнена с цилиндрическим зубчатым профилем, сопрягающимся с зубчатым профилем, выполненным на винтовой резьбовой поверхности другой детали в паре.
Если с зубчатым профилем выполнена только часть детали в винтовой паре, то этот профиль может быть выполнен как на винтовой резьбовой поверхности, так и отдельно, по соседству с резьбой.
Для еще большего уменьшения линейного шага эксцентриковой передачи винт-гайка цилиндрический зубчатый профиль на обеих деталях (винте и гайке) целесообразно выполнить косозубым.
Вышеописанные пары за счет эксцентриков имеют дисбаланс масс, который ограничивает скорость вращения передачи, а также служит источником дополнительных нагрузок на подшипники и другие детали. Для устранения этой проблемы последовательно соединяют несколько винтовых пар с соединенными друг с другом эксцентриками, которые симметрично ориентированы по окружности относительно оси винтовой пары. При этом вторые детали всех пар выполнены за одно целое, как единая деталь.
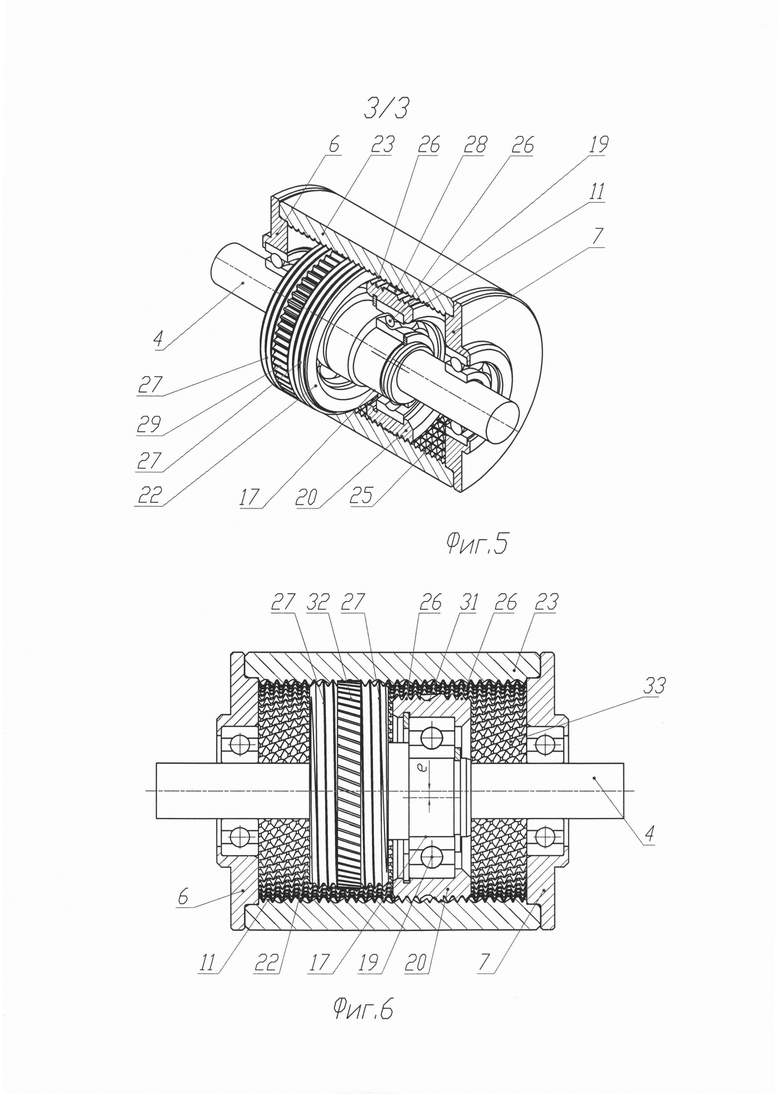
Изобретение иллюстрируется графическими материалами на примерах использования винтовых пар в передачах винт гайка. На фиг. 1 показан продольный разрез винтовой передачи с внутренним эксцентриком, на фиг. 2 поперечное сечение по В-В этой винтовой пары. На фиг. 3 показан продольный разрез винтовой передачи с внешним эксцентриком. На фиг. 4 показан продольный разрез передачи винт-гайка на основе последовательного соединения двух винтовых пар, предназначенного для устранения дисбаланса. На фиг. 5 дан общий вид этой передачи с частичным разрезом. На фиг. 6 показан продольный разрез передачи с внешним эксцентриком и с косозубым цилиндрическим зубчатым профилем на деталях винтовой пары. Все винтовые передачи, изображенные на фигурах, являются дифференциальными, в них эксцентрик является входным вращающимся звеном, а выходным может являться или винт, или гайка, в зависимости от того, какое из этих звеньев мы сделаем неподвижным (стойкой).
Винтовая пара в передаче на фиг. 1 и 2 представлена винтом 1 и гайкой 2. Винт 1 посажен на эксцентрик 3 вала 4 на подшипнике 5. Такая посадка смещает ось O1-O1 винта 1 от оси O-O гайки 2 на эксцентриситет е. Винт 1 имеет возможность свободного вращения относительно эксцентрика 3 на подшипнике 5. Гайка 2 жестко связана с торцевыми фланцами 6 и 7, в которых на подшипниках посажен вал 4. Благодаря этому гайка 2 и вал 4 могут свободно вращаться друг относительно друга. В осевом направлении винт 1 может перемещаться относительно гайки 2 только вместе с эксцентриком 3 и жестко связанным с ним валом 4 за счет упорных колец 8 и буртиков 9. На обращенных друг к другу поверхностях винта 1 и гайки 2 выполнена винтовая резьба 10 и 11. Причем резьба 11 на гайке 2 выполнена по всей ее длине, а резьба 10 нарезана только на двух концах винта 1. Поверх винтовой резьбы 11 гайки 2 нарезан внутренний зубчатый цилиндрический профиль 12. Сопрягающийся с ним внешний зубчатый профиль 13 на винте 1 расположен в центре винта по его длине между резьбовыми участками 10.
Винтовая пара на фиг. 3 имеет также винт 1 и гайку 2, оси которых смещены друг относительно друга. Винт 1 жестко связан с валом 4, а гайка 2 посажена в цилиндрическом корпусе 14 на внутреннем эксцентричном участке 15 с помощью подшипника 16. Винт 1 и гайка 2 имеют сопрягающиеся винтовые резьбы 10 и 11, причем резьба 11 нарезана только на концевых участках гайки 2. Гайка 2 в осевом направлении может перемещаться относительно вала 4 только вместе с корпусом 14, так как зафиксирована стопорными кольцами 8 и буртиками 9 на соответствующих деталях. Вал 4 посажен в корпусе 14 также на подшипниках. На внутренней поверхности гайки 2 в ее центре между участками резьбы 11 нарезан цилиндрический зубчатый профиль 13, сопрягающийся с внешним зубчатым профилем 12, нарезанным поверх резьбы 10 винта 1.
Винтовая передача, изображенная на фиг. 4 и 5, сбалансирована за счет последовательного соединения двух винтовых пар. Здесь на одном валу 4 последовательно расположены два эксцентрика 17 и 18, имеющие противоположный эксцентриситет, т.е. эксцентрики ориентированы симметрично относительно оси передачи. Здесь следует отметить, что в случае последовательного соединения трех винтовых пар, симметричная ориентация эксцентриков будет достигнута при повороте их друг относительно друга на 120 градусов. На эксцентрике 17 на подшипнике 19 посажен винт 20 первой винтовой пары. На эксцентрике 18 на подшипнике 21 посажен винт 22 второй винтовой пары. Гайки обоих винтовых пар соединены вместе и выполнены как единая деталь 23. На внутренней поверхности гайки 23 кроме винтовой нарезки 11 выполнен цилиндрический зубчатый профиль 25. На внешней поверхности обоих винтов 20 и 22 по краям расположена винтовая резьба 26 и 27, а на участках посередине винтов нарезаны цилиндрические зубчатые профили 28 и 29. Винты 20 и 22 зафиксированы в осевом направлении относительно эксцентриков 17 и 18 с помощью стопорных колец и буртиков, которые для ясности чтения чертежей на фигурах не обозначены. Гайка 23 жестко связана с торцевыми фланцами 6 и 7, в которых на подшипниках установлен вал 4.
Такие винтовые пары, как и прототип, имеют малый линейный шаг, позволяющий использовать их в механизмах точного позиционирования. Однако возможно еще более уменьшить линейный шаг вплоть до 0,01 мм/об. Такая винтовая передача с двумя винтовыми парами изображена на фиг. 6. Здесь цилиндрический зубчатый профиль 28 на внутренней поверхности объединенной гайки 23 выполнен косозубым. Соответственно и внешние зубчатые профили 31 и 32 на участках в середине винтов 20 и 22 выполнены также с косыми зубьями. Все остальные обозначения на этой фигуре такие же, как и на фигурах 4 и 5.
Рассмотрим работу винтовой пары на примере использования ее в передаче винт-гайка, изображенной на фигурах 1 и 2. Для определенности положим, что неподвижной деталью - стойкой является гайка 2. При вращении вала 4 винт 1, сидящий на эксцентрике 3, будет совершать орбитальное движение вокруг оси OO. За счет взаимодействия его винтовой резьбы 10 с аналогичной резьбой 11 гайки 2 винт 1 вместе с эксцентриком 3 и валом 4 переместится относительно неподвижной гайки 2 в осевом направлении. Если бы не было зубчатого профиля на деталях, то шаг линейного перемещения определялся бы, как и в прототипе, разностью длин контактирующих линий. Однако из-за проскальзывания резьбы шаг такого перемещения в прототипе не стабилен. Проскальзыванию в предлагаемой винтовой паре будет препятствовать взаимодействие зубьев цилиндрического зубчатого профиля 13 на винте 1 и зубчатого профиля 12 на гайке 2, которые образуют планетарную эксцентриковую зубчатую передачу со стабильным передаточным отношением механизма. В результате, шаг осевого перемещения станет стабильным и будет четко определяться соотношением числа зубьев профилей 13 и 12 на винте 1 и гайке 2. Число зубьев целесообразно подобрать таким, чтобы передаточное отношение планетарной зубчатой передачи было равно передаточному отношению планетарной винтовой пары. В реальных условиях, при использовании стандартных резьб и стандартных зубчатых профилей добиться точного равенства не всегда возможно. Но в любом случае желательно, чтобы эти передаточные отношения были как можно более близки друг к другу. Шаг линейного перемещения будет несколько больше, или несколько меньше шага, определяемого только винтовой резьбой, но при этом стабильным.
Рассмотрим работу винтовой пары в передаче на фиг. 3. Для определенности здесь неподвижным звеном выберем вал 4, и связанный с ним винт 1. При вращении корпуса 14 гайка 2 на эксцентрике 15 будет совершать орбитальное движение вокруг оси вала 4, одновременно поворачиваясь вокруг собственной оси за счет взаимодействия зубчатого профиля 12 на гайке и зубчатого профиля 13 на винте. При одном обороте корпуса 14 гайка 2 повернется вокруг своей оси на угол, определяемый соотношением чисел зубьев профилей 12 и 13, т.е. шаг линейного перемещения станет стабильным, но будет дискретным.
Каждая из винтовых пар 20-23 и 22-23 в передаче на фиг. 4, 5 будет работать аналогично. Только при этом устранится дисбаланс масс за счет противоположных эксцентриков 17 и 18.
Рассмотрим теперь работу винтовой пары в передаче на фиг. 6. Она отличается от винтовой пары на фигурах 4 и 5 только тем, что зубчатые профили 31 на винте 20, 32 на винте 22 и профиль 33 на гайке 23 выполнены косозубыми. Известно, что косые зубья создают дополнительное осевое смещение, которое может, как суммироваться с осевым смещением от взаимодействий резьбы 11 с резьбами 26 и 27 (если наклон зубьев совпадает с наклоном винтовой резьбы), так и вычитаться из него (если наклоны зубьев и резьбы противоположны). В последнем случае еще более уменьшается линейный шаг винтовой пары. Варьируя угол наклона зубчатых профилей 31, 32 и 33 можно получать практически непрерывную линейку шагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовая пара и планетарная передача на её основе | 2020 |
|
RU2752356C1 |
| Линейный электропривод | 2019 |
|
RU2735979C1 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| ЭКСЦЕНТРИКОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2341710C1 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
| ЭКСЦЕНТРИКОВО-ЦИКЛОИДАЛЬНОЕ ЗАЦЕПЛЕНИЕ СОСТАВНЫХ ЗУБЧАТЫХ ПРОФИЛЕЙ | 2008 |
|
RU2385435C1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| ЭКСЦЕНТРИКОВО-ЦИКЛОИДАЛЬНОЕ ЗАЦЕПЛЕНИЕ ЗУБЧАТЫХ ПРОФИЛЕЙ С КРИВОЛИНЕЙНЫМИ ЗУБЬЯМИ | 2010 |
|
RU2416748C1 |


Винтовая пара для эксцентриковой передачи винт-гайка относится к планетарным винтовым передачам, преобразующим вращательное движение в поступательное, и может использоваться в линейных приводах, особенно в механизмах, где требуется точное перемещение и позиционирование, таких как прецизионные металлорежущие станки, механизмы наведения оптических и других приборов, стволов орудий, приводы регулируемых клапанов и задвижек и т.п. Винтовая пара содержит гайку (23) с винтовой резьбой (11) и винт (20) с винтовой резьбой (26), меньшего диаметра, чем винтовая резьба (11) гайки. Винт (20) посажен на эксцентрик (17) входного вала (4). При такой посадке оси винта и гайки смещены друг относительно друга и имеют возможность вращения друг относительно друга. Часть поверхности винта (20) выполнена с цилиндрическим зубчатым профилем (28), который сопрягается с зубчатым профилем (25), выполненным на резьбовой поверхности гайки (23). Для устранения дисбаланса на том же валу (4) выполнен второй эксцентрик, противоположный эксцентрику (17). На этот эксцентрик с возможностью вращения посажен второй винт (22) с винтовой резьбой (27). На этом винте также выполнен цилиндрический зубчатый профиль (29), который сопрягается с тем же зубчатым профилем (25), выполненным поверх резьбы гайки (23). Такое выполнение винтовой пары устраняет возможность проскальзывания витков резьбы, что стабилизирует шаг осевого перемещения передачи. 4 з.п. ф-лы, 6 ил.
1. Винтовая пара для эксцентриковой передачи винт-гайка линейного перемещения, содержащая винт и гайку с винтовой резьбой разного диаметра, оси винта и гайки параллельно смещены друг относительно друга с помощью внутреннего или внешнего эксцентрика и имеют возможность вращаться одна относительно другой, отличающаяся тем, что часть или вся поверхность одной из деталей в винтовой паре выполнена с цилиндрическим зубчатым профилем, сопрягающимся с зубчатым профилем, выполненным на винтовой резьбовой поверхности другой детали в паре.
2. Винтовая пара по п. 1, отличающаяся тем, что участок цилиндрического зубчатого профиля на поверхности первой детали совмещен с винтовой резьбой.
3. Винтовая пара по п. 1, отличающаяся тем, что участок цилиндрического зубчатого профиля на поверхности первой детали расположен отдельно от винтовой резьбы.
4. Винтовая пара по п. 1, отличающаяся тем, что цилиндрический зубчатый профиль на обеих деталях (винте и гайке) выполнен косозубым.
5. Винтовая пара по любому из пп. 1-4, отличающаяся тем, что она дополнительно снабжена, по меньшей мере, второй такой же парой и эксцентрики всех пар соединены друг с другом и ориентированы симметрично относительно оси винтовой пары, а вторые детали винтовых пар выполнены за одно целое.
| Башенный кран с подъемной стрелой и поворотной колонной | 1959 |
|
SU130651A1 |
| ВИНТОВАЯ ПЕРЕДАЧА | 2014 |
|
RU2570846C2 |
| US 4186620 A1, 05.02.1980 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПСИХОТЕХНИЧЕСКОГО ОТБОРА ВАГОНОВОЖАТЫХ И ШОФЕРОВ | 1929 |
|
SU20269A1 |

