Изобретение относится к радионавигации и может быть использовано для определения пространственных координат движущихся объектов и управления их движением в зонах навигации. Радиосигналы передают с движущегося объекта, их принимают и идентифицируют станциями принимающей системы с заданными координатами фазовых центров антенн (ФЦА) станций и определяют координаты ФЦА объекта. Реализация способа позволит, в том числе, упростить соответствующие системы позиционирования, обеспечить однозначность определения координат объекта без привлечения дополнительной информации.
Известны способы определения координат объектов, основанные на применении угломерных, дальномерных, разностно и суммарно-дальномерных и комбинированных методов определения местоположения объекта с амплитудными, временными, частотными, фазовыми и импульсно-фазовыми методами измерения параметров радиосигнала (Патенты РФ 2096800, 2213979, 2258242, 2264598, 2309420, 2325666, 2363117, 2371737, 2378660, 2430385, 2439617, 2506605, 2507529, 2510518, 2539968, 2558640, 2559813, 2567114, 2568104, 2572589, 2584976, 2597007, 2598000, 2599984, 2602506, 2620359, 2653506, 2657237; Патенты США №№9423502 В2, 9465099 В2, 9485629 В2, 9488735 В2, 9661604 В1, 9681267 В2, 2016/0327630 А1. 2016/0330584 А1, 2016/0337933 А1; Основы испытаний летательных аппаратов/ Е.И. Кринецкий и др. Под ред. Е.И. Кринецкого. - М.: Машиностр., 1979, с. 64-89; Радиотехнические системы/Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, с. 7, 17-18, п.п. 7.1-7.4, гл. 10.; Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.; «Радиотехника», 2008, гл. 5; Кинкулькин И.Е. и др. Фазовый метод определения координат. - М.: Сов. радио, 1979, с. 10-11, 97-100). Известные способы имеют те или иные недостатки, например, необходимость механического перемещения антенной системы, невозможность однозначного определения координат объекта, необходимость априорной информации о местоположении объекта, необходимость общей синхронизации передающих и принимающих радиосигналы радиотехнических объектов, недостаточное быстродействие и точность.
По критерию минимальной достаточности наиболее близким является способ определения координат объектов по патенту автора RU №2624457.
Преимуществом заявляемого способа определения координат объектов по сравнению с известными способами является обеспечение однозначного определения координат объекта без привлечения дополнительной информации о местоположении объекта и отсутствие требования наличия единой системы времени принимающей радиосигналы системы и объекта. Это достигается тем, что радиосигналы передают с движущегося объекта, их принимают и идентифицируют станциями принимающей системы, содержащей совокупность по крайней мере двух групп станций с заданными координатами ФЦА станций, включающих по крайней по четыре станции в каждой группе, ФЦА которых для одной группы располагают на одной заданной прямой, а ФЦА для другой группы располагают на другой заданной прямой. На станциях измеряют проекции скорости и ускорения ФЦА объекта на прямые, соединяющие ФЦА станций с ФЦА объекта, и по указанным проекциям для каждой из четырех упорядоченно расположенных станций каждой из групп определяют дальности от ФЦА объекта до ФЦА станций по предложенным в способе уравнениям измерений. По этим дальностям определяют координаты ФЦА объекта в заданной Декартовой системе координат любым из известных дальномерных методов. Можно использовать, например, подходящий из методов, защищенных патентами автора RU №№2484604, 2484605, или метод, опубликованный в статье автора [Простой алгоритм определения пространственных координат объекта дальномерным методом // Информационно-измерительные и управляющие системы. 2015. Т. 13. №4, С. 3-8]).
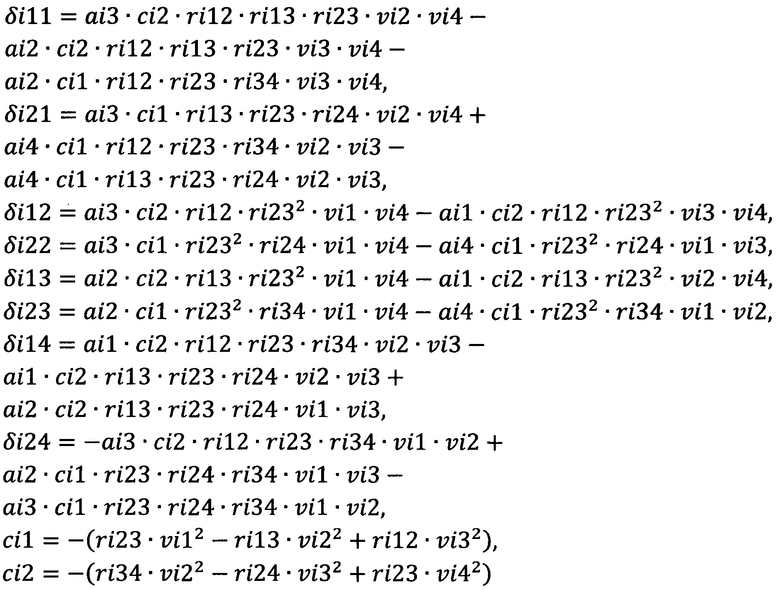
Для достижения указанного технического результата в соответствии с настоящим изобретением в способе определения координат движущегося объекта по дальностям с него передают радиосигналы, принимают и идентифицируют их станциями принимающей системы, содержащей совокупность по крайней мере двух групп станций, i-тую и j -тую, с заданными координатами фазовых центров антенн станций в заданной трехмерной Декартовой системе координат (X,Y,Z), включающих по крайней по четыре станции в каждой группе, фазовые центры антенн которых для i-той группы располагают на одной заданной прямой, а фазовые центры антенн для j-той группы располагают на другой заданной прямой, и измеряют проекции скорости и ускорения фазового центра антенны объекта на прямые, соединяющие фазовые центры антенн станций с фазовым центром антенны объекта, и по указанным проекциям для каждой из четырех упорядоченно расположенных станций i-той группы определяют дальности di1, di2, di3 и di4 от фазового центра антенны объекта до фазовых центров антенн станций в соответствии с уравнениями измерений
и ri12, ri23, ri34, ri13, ri24 - расстояния соответственно между фазовыми центрами антенн станций с индексами i1 и i2, i2 и i3, i3 и i4, i1 и i3, i2 и i4, a νi1, νi2, νi3, νi4, - указанные проекции скорости, ai1, ai2, ai3, ai4 - указанные проекции ускорения, аналогично для каждой из четырех упорядоченно расположенных станций j-той группы по приведенным уравнениям измерений, в которых соответственно индекс i меняют на индекс j, определяют соответствующие дальности di1, di2, di3 и di4 от фазового центра антенны объекта до фазовых центров антенн этих станций и по определенным таким образом дальностям, соответствующим i-той и j-той группам станций, определяют координаты объекта.
Также фазовые центры антенн i-той группы станций располагают на одной заданной прямой, расположенной в плоскости, параллельной плоскости XOY на расстоянии zi от нее, а фазовые центры антенн j-той группы станций располагают на другой заданной прямой, расположенной в другой плоскости, также параллельной плоскости XOY на расстоянии zj от нее, и определяют координаты движущегося объекта х и у в соответствии с уравнениями измерений

где xi1, yi1, xi4, yi4, xj1, yj1, xj4, yj4 - соответственно координаты фазовых центров антенн станций по осям X и Y с индексами i1, j1 и i4, j4 в указанной системе координат, а координату движущегося объекта z определяют, например, в соответствии с уравнением измерений

Совокупность всех признаков позволяет определить пространственные координаты объекта с достижением указанного технического результата.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о способах того же назначения с указанной совокупностью признаков. Ниже изобретение описано более детально.
Сущность способа заключается в следующем.
С движущегося объекта передают радиосигналы, принимают и идентифицируют их станциями принимающей системы, содержащей совокупность по крайней мере двух групп станций, i-тую и j-тую, с заданными координатами ФЦА станций в заданной трехмерной Декартовой системе координат (X,F,Z), включающей по крайней по четыре станции в каждой группе, ФЦА которых для i-той группы располагают на одной заданной прямой, а ФЦА для j-той группы располагают на другой заданной прямой.
На станциях измеряют проекции скорости и ускорения ФЦА объекта на прямые, соединяющие ФЦА станций с ФЦА объекта. Измерение скорости основано, например, на измерении смещения частоты радиосигнала, связанного с эффектом Доплера. По указанным проекциям для каждой из четырех упорядоченно расположенных станций i-той группы определяют дальности di1, di2, di3 и di4 от ФЦА объекта до ФЦА станций в соответствии с уравнениями измерений (1).
Аналогично для каждой из четырех упорядоченно расположенных станций j-той группы по уравнениям измерений (1), в которых соответственно индекс i меняют на индекс j, определяют соответствующие дальности di1, di2, di3 и di4 от ФЦА объекта до ФЦА этих станций. По определенным таким образом дальностям, соответствующим i-той и j-той группам станций, определяют координаты ФЦА объекта.
На практике может быть реализовано, например, следующее размещение станций принимающей системы: ФЦА i-той группы станций располагают на одной заданной прямой, расположенной в плоскости, параллельной плоскости XOY на расстоянии zi от нее, а ФЦА j-той группы станций располагают на другой заданной прямой, расположенной в другой плоскости, также параллельной плоскости XOY на расстоянии zj от нее, и определяют координаты движущегося объекта х, у и zb соответствии с уравнениями измерений (2) и (3).
Координаты ФЦА объекта определяются однозначно, и не требуется привлечение дополнительной априорной информации о расположении ФЦА объекта.
Способ может найти применение для построения универсальной навигационно-посадочной системы.
Перечислим основные достоинства способа:
- обеспечивает однозначное определение пространственных координат ФЦА объекта с высокой точностью;
- практически исключается влияние на точность определения координат наличие отраженных (например, от земли) радиосигналов;
-не требуется единая система времени принимающей системы и объекта;
- реализация способа проще и дешевле, чем известных аналогов;
- позволяет осуществлять одновременные измерения на большом количестве объектов.
Результативность и эффективность использования заявляемого способа состоит в том, что он может быть применен на практике для развития и совершенствования радиотехнических систем определения координат движущихся объектов, а также в других приложениях. Способ позволяет однозначно определять координаты с большой точностью и более просто по сравнению с известными способами.
Таким образом, заявляемый способ обеспечивает появление новых свойств, не достигаемых в аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию «новизны».
Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Таким образом, заявленное изобретение соответствует критериям «новизна» и «изобретательский уровень», а также критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО ДАЛЬНОСТЯМ | 2019 |
|
RU2695807C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2681955C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2682317C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2687057C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2686068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2686070C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2687056C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОТЕХНИЧЕСКОГО ОБЪЕКТА | 2020 |
|
RU2737533C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОТЕХНИЧЕСКОГО ОБЪЕКТА | 2020 |
|
RU2737532C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ | 2020 |
|
RU2738641C1 |
Изобретение относится к радионавигации и может использоваться для определения пространственных координат движущегося объекта и управления его движением в зонах навигации. Достигаемый технический результат - отсутствие требования наличия единой системы времени принимающей радиосигналы системы и объекта. Способ характеризуется тем, что радиосигналы передают с движущегося объекта, их принимают и идентифицируют станциями принимающей системы, содержащей совокупность по крайней мере двух групп станций с заданными координатами фазовых центров антенн (ФЦА) станций, включающих по крайней мере по четыре станции в каждой группе, ФЦА которых для одной группы располагают на одной заданной прямой, а ФЦА для другой группы располагают на другой заданной прямой. На станциях измеряют проекции скорости и ускорения ФЦА объекта на прямые, соединяющие ФЦА станций с ФЦА объекта, и по указанным проекциям для каждой из четырех упорядоченно расположенных станций каждой из групп определяют дальности от ФЦА объекта до ФЦА станций по предложенным в способе уравнениям измерений. По этим дальностям определяют координаты ФЦА объекта в заданной Декартовой системе координат. Приведены простые уравнения измерений пространственных координат объекта при определенных условиях расположения станций. 1 з.п. ф-лы.
1. Способ определения координат движущегося объекта по дальностям, при котором с него передают радиосигналы, принимают и идентифицируют их станциями принимающей системы, содержащей совокупность по крайней мере двух групп станций, i-ю и j-ю, с заданными координатами фазовых центров антенн станций в заданной трехмерной Декартовой системе координат (X, Y, Z), включающих по крайней мере по четыре станции в каждой группе, фазовые центры антенн которых для i-й группы располагают на одной заданной прямой, а фазовые центры антенн для j-й группы располагают на другой заданной прямой, и измеряют проекции скорости и ускорения фазового центра антенны объекта на прямые, соединяющие фазовые центры антенн станций с фазовым центром антенны объекта, и по указанным проекциям для каждой из четырех упорядоченно расположенных станций i-й группы определяют дальности di1, di2, di3 и di4 от фазового центра антенны объекта до фазовых центров антенн станций в соответствии с уравнениями измерений
di1=(δi11+δi21)/Δi, di2=(δi12+δi22)/Δi,
di3=(δi13+δi23)/Δi, di4=(δi14+δi24)/Δi,
где Δi=δi1+δi2+δi3,
и ri12, ri23, ri34, ri13, ri24 - расстояния соответственно между фазовыми центрами антенн станций с индексами i1 и i2, i2 и i3, i3 и i4, i1 и i3, i2 и i4, a νi1, νi2, νi3, νi4, - указанные проекции скорости, ai1, ai2, ai3, ai4 - указанные проекции ускорения, аналогично для каждой из четырех упорядоченно расположенных станций j-й группы по приведенным уравнениям измерений, в которых соответственно индекс z меняют на индекс j, определяют соответствующие дальности dj1, dj2, dj3, dj4 от фазового центра антенны объекта до фазовых центров антенн этих станций и по определенным таким образом дальностям, соответствующим i-й и j-й группам станций, определяют координаты объекта.
2. Способ по п. 1, отличающийся тем, что фазовые центры антенн i-й группы станций располагают на одной заданной прямой, расположенной в плоскости, параллельной плоскости XOY на расстоянии zi от нее, а фазовые центры антенн j-й группы станций располагают на другой заданной прямой, расположенной в другой плоскости, также параллельной плоскости XOY на расстоянии zj от нее, и определяют координаты движущегося объекта х и у в соответствии с уравнениями измерений
х=р1/р0, у=р2/р0, где
р0=(xi4-xi1)(yj4-yj1)-(xj4-xj1)(yi4-yi1),
p1=c1(yj4-yj1)-c2(yi4-yi1), p2=c2(xi4-xi1)-c1(xj4-xj1),
c1=[(di12-xi12-yi12)-[di42-xi42-yi42)]/2,
c2=[{djl2-xj12-yj12)-[dj42-xj42-yj42)]/2,
где xi1, yi1, xi4, yi4, xj1, yj1, xj4, yj4 - соответственно координаты фазовых центров антенн станций по осям X и Y с индексами i1, j1 и i4, i4 в указанной системе координат, а координату движущегося объекта z определяют, например, в соответствии с уравнением измерений
z=[(fi4-fj4)+x(xi4-xj4)+y(yi4-yj4)]/(zj-zi), где
fi4=[di42-xi42-yi42-zi2)/2, fi4=(dj42-xj42-yj42-zj2)/2.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2016 |
|
RU2624457C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2016 |
|
RU2624461C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ РЛС | 1999 |
|
RU2166199C2 |
| RU 2008116582 A, 10.11.2009 | |||
| US 8862157 B2, 14.10.2014 | |||
| WO 2003098951 A1, 27.11.2003 | |||
| JP 2009229393 A, 08.10.2009 | |||
| WO 2013048210 A, 04.04.2013. | |||

