Изобретение относится к области радиолокации и может быть использовано в наземных радиолокаторах с режимом пассивного обнаружения и измерения координат неизлучающих целей.
Известен способ пассивного определения дальности цели с использованием сигнала обзорной РЛС (Л.Б.Брант. Справочник по методам радиоэлектронного подавления и помехозащиты систем с радиолокационным управлением, 1987 г.).
Сущность способа состоит в следующем. РЛС с известными координатами осуществляет круговое сканирование узким лучом в горизонтальной плоскости. На приемной позиции определяют угол в горизонтальной плоскости α, равный разности азимутов цели и приемной позиции относительно РЛС по времени tα прохода луча РЛС между целью и приемной позицией:
где Т - период вращения антенны. Измеряют также разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция по задержке отраженного сигнала относительно прямого. С использованием теоремы косинусов определяют дальность цели R.
Недостаток данного способа заключается в том, что должны быть известны координаты РЛС.
Известен способ определения местоположения РЛС, излучающей радиоимпульсы с помощью сканирующей антенны (патент ЕПВ N 0342529, МКИ 4 G 01 S 13/02, 13/87. Способ определения местоположения излучателя радиосигналов).
Вначале в приемной позиции запоминают координаты нескольких находящихся в пределах прямой видимости точек на местности. Затем измеряют времена запаздывания сигналов, отраженных от этих точек, относительно момента приема импульса, излученного РЛС. На основе измеренных времен запаздываний вычисляют вероятные местоположения РЛС и соответствующие отраженные сигналы. Отраженные сигналы сравнивают с запомненными данными о точках на местности.
Недостатком данного способа является то, что определяется местоположение только целей, имеющих РЛС.
Известен способ определения координат цели с использованием РЛС, излучающей кодированные сигналы (патент Японии N 1-57312, МКИ 4 G 01 S 13/46. Пассивная радиолокационная система. Заявка от 06.10.81).
Источник радиосигналов излучает импульсы с помощью сканирующей направленной антенны. Импульсы кодируются в соответствии с текущими углами азимута и места антенны. Приемная позиция с помощью направленной антенны определяет азимут обнаруженной цели и декодирует углы азимута и места излучающей антенны из принимаемых отраженных электромагнитных импульсов. По измеренным углам и известному местоположению источника радиосигналов определяют координаты цели.
Недостатком данного способа являются необходимость знания на приемной позиции кода, используемого источником радиосигналов, и его местоположения.
В качестве прототипа выбран способ, изложенный в (Munich A., Schecker Е. Bistatic Sistem Passively Tracks Radar Targets. Microwaves & RF. - 1991. - 30, N 9, P. 78-79, 82-83).
Сущность способа состоит в том, что на приемной позиции (ПРМ) измеряют угол α, равный разности азимутов цели и ПРМ относительно РЛС по времени прохода луча РЛС между целью и ПРМ, угол γ, равный разности азимутов РЛС и цели относительно ПРМ с помощью направленной антенны ПРМ и разность расстояний τ РЛС - цель - ПРМ и РЛС - ПРМ по задержке отраженного сигнала относительно прямого сигнала, искомая горизонтальная дальность равна: (1)
(1)
Недостатком такого способа определения дальности является появление ошибок в случае, если цель, РЛС и приемная позиция не лежат в горизонтальной плоскости. Для случая наземного расположения РЛС и приемной позиции чем больше высота цели, тем больше ошибка измерения дальности.
Техническим результатом предлагаемого способа является повышение точности измерения дальности всевысотных воздушных целей.
Сущность предлагаемого способа определения дальности цели заключается в том, что измеряют разность азимутов ПРМ и цели относительно РЛС, разность азимутов РЛС и цели относительно ПРМ, разность расстояний РЛС - цель - ПРМ и РЛС - ПРМ, а также угол места цели β с помощью направленной антенны ПРМ, горизонтальную дальность цели определяют по формуле: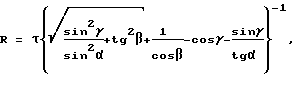 (2)
(2)
где α - разность азимутов ПРМ и цели относительно РЛС;
γ - разность азимутов РЛС и цели относительно ПРМ;
τ - разность расстояний РЛС - цель - ПРМ и РЛС - ПРМ;
β - угол места цели относительно ПРМ.
Сущность способа поясняется следующими рассуждениями. Пусть начало системы координат совмещено с ПРМ, ось OY направлена через РЛС, a OZ - вертикально вверх (фиг. 1). Величины α, γ, β, и τ связаны с координатами РЛС и цели следующим образом:



Выразим τ через углы и искомую горизонтальную дальность цели R: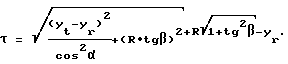
Считая положительным направление вращения по часовой стрелке, после преобразований получаем выражение (2). В частном случае, когда цель лежит в горизонтальной плоскости (β = 0), приходим к формуле (1).
На фиг. 2 представлена схема устройства для реализации предложенного способа. Оно состоит из антенны основной 1, антенны дополнительной 2, измерителя 3, измерителя 4, вычитателя 5 и вычислителя 6. Способ реализуется следующим образом. Остронаправленный луч основной антенны 1 направлен на цель. Эхосигналы поступают в измеритель 3 и измеритель 4. Антенна дополнительная 2 направлена на излучающую РЛС. Прямые сигналы поступают в измеритель 3 и измеритель 4. В измерителе 4 определяется разность расстояний τ по задержке эхосигнала относительно прямого. В измерителе 3 определяется α по интервалу времени между моментом приема пачки эхосигналов и моментом приема пачки прямых импульсов с учетом известного периода вращения антенны РЛС, который может быть измерен заранее. В вычитателе 5 вычисляется угол γ путем нахождения разности азимутов антенны основной 1 и антенны дополнительной 2. В вычислитель 6 поступают значения α, τ, γ,, а также угол места цели β от антенны основной 1. В вычислителе определяется горизонтальная дальность цели R по формуле (2).
Таким образом, данный способ позволяет более точно измерять дальность цели путем учета ее угла места.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ БОРТОВОЙ РЛС | 2001 |
|
RU2217772C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2273033C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ | 2000 |
|
RU2189056C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАБЛЮДЕНИЯ (РАКУРСА) ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2316789C1 |

Изобретение относится к радиолокации. Областью применения изобретения могут быть наземные РЛС с режимом пассивного обнаружения и измерения координат неизлучающих целей. Технический результат - повышение точности измерения дальности всевысотных воздушных целей. Сущность изобретения заключается в том, что для учета высоты цели, кроме угла при сканирующей РЛС, угла при приемной позиции и времени запаздывания отраженного сигнала относительно прямого, дополнительно измеряется угол места цели относительно приемной позиции. 2 ил.
Способ определения горизонтальной дальности цели по излучению сканирующей РЛС, заключающийся в том, что измеряют разность азимутов приемной позиции и цели относительно РЛС, разность азимутов РЛС и цели относительно приемной позиции, разность расстояний РСЛ - цель - приемная позиция и РЛС - приемная позиция, отличающийся тем, что измеряют угол места цели β с помощью направленной антенны приемной позиции, при этом горизонтальную дальность цели определяют по формуле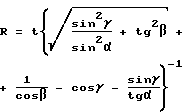
где α - разность азимутов приемной позиции и цели относительно РЛС;
γ - разность азимутов РЛС и цели относительно приемной позиции;
l - разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция;
β - угол места цели относительно приемной позиции.
| EP 0342529 A2, 23.11.1989 | |||
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОСТАНЦИИ ПО РАЗНОСТИ ПРИХОДА РАДИОСИГНАЛА ВО ВРЕМЕНИ В ПУНКТЫ ПРИЕМА | 1993 |
|
RU2096800C1 |
| US 4370656 A, 20.03.1984 | |||
| US 4438439 A, 20.03.1984 | |||
| US 4558323 A, 10.12.1985 | |||
| US 4746924 A, 24.05.1988 | |||
| US 4386355 A, 31.05.1983. | |||
