Способ относится к измерительной технике в области измерений теплофизических параметров техногенных и биологических объектов и предназначен для исследования их инфракрасной видности. Способ может быть использован при испытаниях новых средств и методов тепловой защиты различных объектов.
Все известные способы измерения инфракрасной видности основаны на регистрации параметров физического теплового поля исследуемого объекта и последующей обработке получаемых данных.
Известен способ измерения инфракрасной видности объекта, согласно которому в качестве показателя инфракрасной видности объекта принимается его температурный контраст (Ллойд Дж. Системы тепловидения // Пер. с англ. / М.: Мир, 1978. - 414 с.; С. 38-42). Температурный контраст согласно данному способу определяется по соотношению:
где
WT, WB - измеренные плотности теплового потока объекта и фона, соответственно, Вт/м2.
Наиболее близким к предлагаемому является способ, в котором в качестве показателя инфракрасной видности объекта используется эквивалентная фоновому шуму разность температуры объекта и фона (по международной терминологии обозначаемая NETD - noise-equivalent temperature difference) (Ллойд Дж. Системы тепловидения // Пер. с англ. / М.: Мир, 1978. - 414 с.; С. 162-164). Согласно данному способу на заданной дистанции визирования выполняется измерение температуры объекта и фона, вычисляется разность измеренных температур и проводится ее сравнение с пороговым значением, обозначаемым NETD. В случае, когда измеренная разность температуры объекта и фона превышает NETD, объект считается видимым в инфракрасном диапазоне, если не превышает - не видимым. Указанный способ реализует функцию индикации теплового поля объекта, т.е. показатель инфракрасной видности принимает всего два значения: либо 0, либо 1.
Для измерений инфракрасной дальности видимости объекта известно и используется на практике несколько способов.
Известен способ измерения инфракрасной дальности видимости, заключающийся в применении прибора ночного видения (ПНВ) с инфракрасным подсветом объекта для регистрации потока излучения, отраженного от объекта (Справочник по приборам инфракрасной техники / Под. ред. Л.З. Криксунова. - Киев: Техника, 1980. - 232 с.; С. 183-184). При реализации данного способа используют электронный оптический преобразователь (ЭОП), подсвет выполняют инфракрасным прожектором, а объект наблюдения считают малоразмерным предметом плоской формы, установленным перпендикулярно линии визирования, при этом расчет инфракрасной дальности видимости LTB выполняют по соотношению:

где
DПР - рабочий диаметр прожектора, м;
τПР - коэффициент пропускания оптической системы прожектора (включая инфракрасный фильтр);
SПР - площадь рабочего тела источника излучения прожектора, м2;
τA - коэффициент пропускания излучения слоем атмосферы, находящимся между объектом наблюдения и прибором;
DОБ, ƒОБ - диаметр и фокусное расстояние объектива, соответственно, м;
τОП - коэффициент пропускания оптической системы ПНВ;
ρОП - коэффициент диффузного отражения наблюдаемого объекта;
ϕΣ - интегральная чувствительность фотокатода ЭОП;
ФПР - световой поток, излучаемый лампой прожектора, Вт;
j - плотность тока термоэлектронной эмиссии фотокатода, А/м2;
K - коэффициент использования излучения;
ξ - коэффициент, определяемый соотношением яркости фона и изображения на экране ПНВ.
Известен также способ измерения дальности действия обзорных теплопеленгаторов (Козелкин В.В., Усольцев И.Ф. Основы инфракрасной техники. М.: Машиностроение, 1974. - 336 с.; С. 304), по своей сути являющийся способом измерения инфракрасной дальности видимости объекта, заключающийся в измерении интенсивности излучения исследуемого объекта в области спектральной чувствительности приемника и последующем расчете дальности видимости по соотношению:
где
τoc - коэффициент пропускания оптической системы;
Doc - диаметр входного зрачка оптической системы, м;
D* - обнаружительная способность приемника излучения;
I - интенсивность излучения объекта в области спектральной чувствительности приемника, Вт/м2;
k - соотношение сигнал-шум, требуемое для обнаружения;
γ - угловая разрешающая способность оптической системы;
T- длительность просмотра (обзора) поля зрения, с;
N - количество чувствительных элементов приемника.
Наиболее близким к предлагаемому по технической сущности является графоаналитический способ измерения дальности действия тепловых головок самонаведения (Козелкин В.В., Усольцев И.Ф. Основы инфракрасной техники. М.: Машиностроение, 1974. - 336 с.; С. 304-305), заключающийся в регистрации излучения, падающего на оптическую систему пассивного инфракрасного прибора в заданном направлении ракурса, в области спектральной чувствительности приемного устройства прибора, измерении интенсивности излучения объекта в данном направлении, последующем определении по известной аналитической зависимости значений плотности потока излучения от объекта для разных дистанций визирования, построении графической зависимости плотности потока излучения от дистанции визирования и нахождении из полученного графика значения инфракрасной дальности видимости исходя из принимаемого в качестве показателя инфракрасной видности объекта значения минимальной плотности потока излучения, достаточной для четкого распознавания (видения) изображения объекта (прототип).
Все известные способы, включая прототип, имеют общие недостатки. Они заключаются в следующем.
Во всех способах, при регистрации потока излучения от объекта сам объект считается точечным источником излучения, что справедливо лишь на больших дистанциях визирования, достигающих порядковых значений в несколько километров. На таких дистанциях существенно возрастает неопределенность измерений параметров теплового поля объекта: температуры, плотности теплового потока, интенсивности излучения, дистанции визирования, спектрального коэффициента пропускания атмосферы. В результате этого суммарная неопределенность измерения инфракрасной дальности видимости объекта может достигать значительных величин (от 50% и более), что абсолютно неприемлемо для большинства практических задач.
Кроме этого, ни в одном из способов не учитывается пространственное распределение указанных тепловых параметров по поверхности объекта, т.е. не принимается во внимание его неизотермичность, которая присуща любому техногенному и биологическому объекту. На практике наружные поверхности объектов всегда имеют явно выраженные участки, как с высокой, так и с низкой температурой. К примеру, самолеты, вертолеты, корабли, автомобили имеют повышенную температуру в районе газовыпускных устройств, машинных отделений и более низкую температуру в других частях корпуса. В связи с этим различные участки поверхности одного и того же объекта становятся видны с различных дистанций, поэтому непринятие во внимание данного фактора на практике приводит к недостоверной информации, что не позволяет разрабатывать практические рекомендации для улучшения тепловой защиты объекта.
Кроме этого, реализация перечисленных способов требует выполнения натурных измерений на нескольких различных дистанциях до объекта и в различных метеорологических условиях, что не всегда осуществимо практически и всегда влечет за собой значительные финансовые затраты.
Предлагаемое техническое решение направлено на решение проблемы обеспечения единства измерений, на достижение высокой точности измерений инфракрасной видности, на решение задач повышения эффективности теплового обнаружения объектов при планировании их поиска, а также - на значимое снижение затрат на проведение тепловых испытаний техногенных и биологических объектов.
Достигаемый технический результат от применения способа - повышение точности измерения инфракрасной дальности видимости, достижение единства измерений показателя инфракрасной видности для всех видов техногенных и биологических объектов с одновременным обеспечением возможности сравнения объектов по их тепловой защите, повышение эффективности теплового поиска объектов и снижение себестоимости испытаний объектов на их инфракрасную видность.
Указанный технический результат достигается тем, что в предложенном способе измерения показателя инфракрасной видности и инфракрасной дальности видимости объекта выполняют регистрацию его излучения тепловизионным средством измерения с широким оптическим углом поля зрения, при этом направление ракурса и дистанцию визирования выбирают таким образом, чтобы площади проекций объекта и окружающего фона на приемную матрицу тепловизора были приблизительно одинаковы, выполняют регистрацию тепловой сигнатуры ситуационной картины объекта, корректируют тепловизионную сигнатуру по измеренной температуре окружающего фона путем подбора установочных параметров тепловизионного снимка до достижения равенства измеренной температуры окружающего фона ее фактическому значению, выделяют объект на полученной сигнатуре путем определения границ проекции объекта на температурной матрице сигнатуры, используют выделенную проекцию и по известным угловому полю зрения тепловизора γ, длине объекта D, либо дистанции LV до него, определяют визируемую площадь SΣ объекта, его локальную максимальную температуру TMAX, среднюю температуру окружающего фона TF, разность температур ΔTMAX=TMAX-TF и средневзвешенную амплитуду пространственных флуктуаций температуры фона ΔTF, разбивают выделенную проекцию объекта на N квазиизотермических зон, при этом добиваются максимально-возможного количества зон N с соблюдением условия, чтобы площадь зоны с максимальной температурой была не меньше площади, приходящейся на один пиксельный элемент матрицы тепловизора при данной дистанции визирования, находят площадь каждой температурной зоны Si и соответствующую ей среднюю температуру Ti, формируют эквивалентную тепло-геометрическую модель (мишень) объекта в виде комбинации из N геометрически подобных прямоугольников, концентрично уложенных друг на друга, при этом эквивалентную ширину Hi каждого i-го прямоугольника рассчитывают по соотношению  , а его длину Di - по соотношению Di=Hi⋅D2/SΣ, в центре модели располагают прямоугольник с порядковым номером i=1, имеющим максимальную температуру из набора полученных значений Ti;, описывают его следующим i+1 прямоугольником, имеющим меньшую температуру Ti+1, удовлетворяющую условию Ti+2<Ti+1<Ti, последним располагают прямоугольник с порядковым номером N, имеющим минимальную температуру из набора значений Ti, затем рассчитывают эквивалентную разность ΔTi, средней температуры i-го прямоугольника Ti и температуры окружающего фона TF по соотношению
, а его длину Di - по соотношению Di=Hi⋅D2/SΣ, в центре модели располагают прямоугольник с порядковым номером i=1, имеющим максимальную температуру из набора полученных значений Ti;, описывают его следующим i+1 прямоугольником, имеющим меньшую температуру Ti+1, удовлетворяющую условию Ti+2<Ti+1<Ti, последним располагают прямоугольник с порядковым номером N, имеющим минимальную температуру из набора значений Ti, затем рассчитывают эквивалентную разность ΔTi, средней температуры i-го прямоугольника Ti и температуры окружающего фона TF по соотношению  , по соотношению
, по соотношению  рассчитывают значения показателя инфракрасной видности каждого i-го прямоугольника, при этом значение показателя для N-го прямоугольника принимают в качестве показателя инфракрасной видности всего объекта, задают значение метеорологической дальности видимости МДВ, после этого для каждого i-го прямоугольника рассчитывают значения инфракрасной дальности видимости LTBi по соотношению
рассчитывают значения показателя инфракрасной видности каждого i-го прямоугольника, при этом значение показателя для N-го прямоугольника принимают в качестве показателя инфракрасной видности всего объекта, задают значение метеорологической дальности видимости МДВ, после этого для каждого i-го прямоугольника рассчитывают значения инфракрасной дальности видимости LTBi по соотношению  , выбирают тип интересующего теплового приемника, из его технических характеристик находят угловое разрешение γ, задают минимальное количество чувствительных элементов NP приемника, на которые при измерении должен проецироваться объект, рассчитывают значения оптической дальности видимости каждого i-го прямоугольника по соотношению LОПТi=Hi/(γ⋅NP), затем в одной прямоугольной системе координат строят графики зависимостей LTBi=ƒ(Hi) и LОПТi=ƒ(Hi), при этом по оси абсцисс откладывают значения эквивалентной ширины Hi, а по оси ординат - значения дальностей видимости LTBi и LОПТi, находят точку пересечения данных графических зависимостей и ее ординату, значение которой принимают за фактическую инфракрасную дальность видимости объекта.
, выбирают тип интересующего теплового приемника, из его технических характеристик находят угловое разрешение γ, задают минимальное количество чувствительных элементов NP приемника, на которые при измерении должен проецироваться объект, рассчитывают значения оптической дальности видимости каждого i-го прямоугольника по соотношению LОПТi=Hi/(γ⋅NP), затем в одной прямоугольной системе координат строят графики зависимостей LTBi=ƒ(Hi) и LОПТi=ƒ(Hi), при этом по оси абсцисс откладывают значения эквивалентной ширины Hi, а по оси ординат - значения дальностей видимости LTBi и LОПТi, находят точку пересечения данных графических зависимостей и ее ординату, значение которой принимают за фактическую инфракрасную дальность видимости объекта.
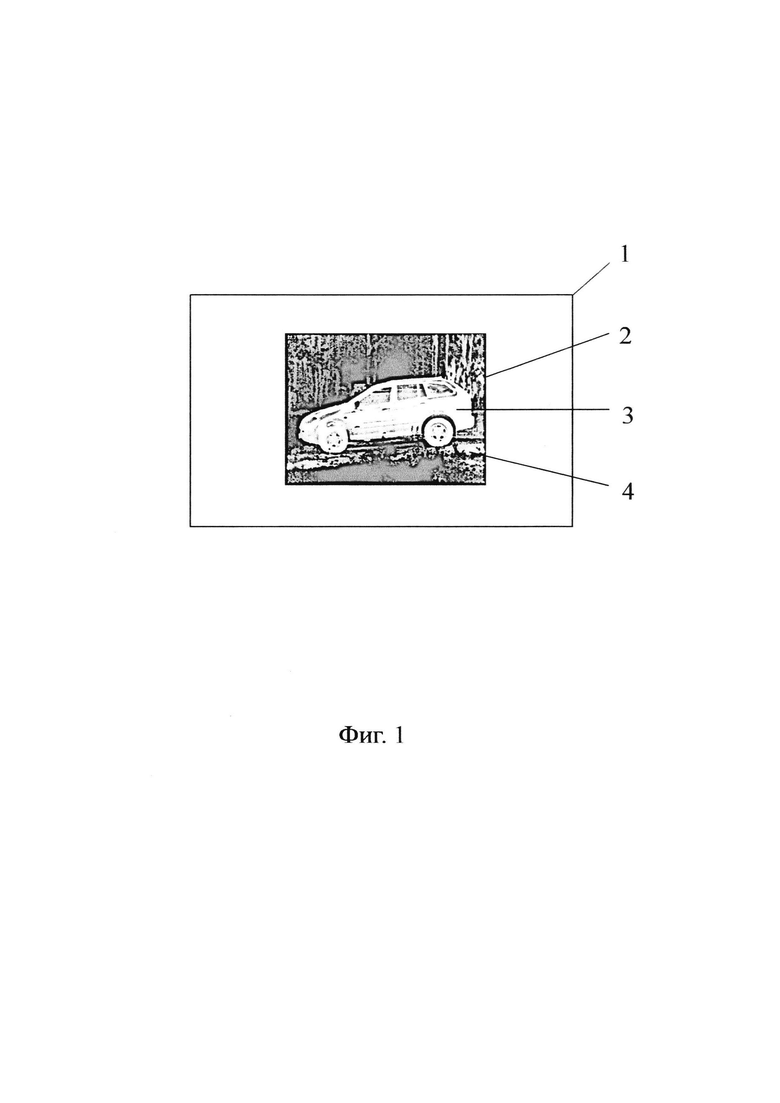
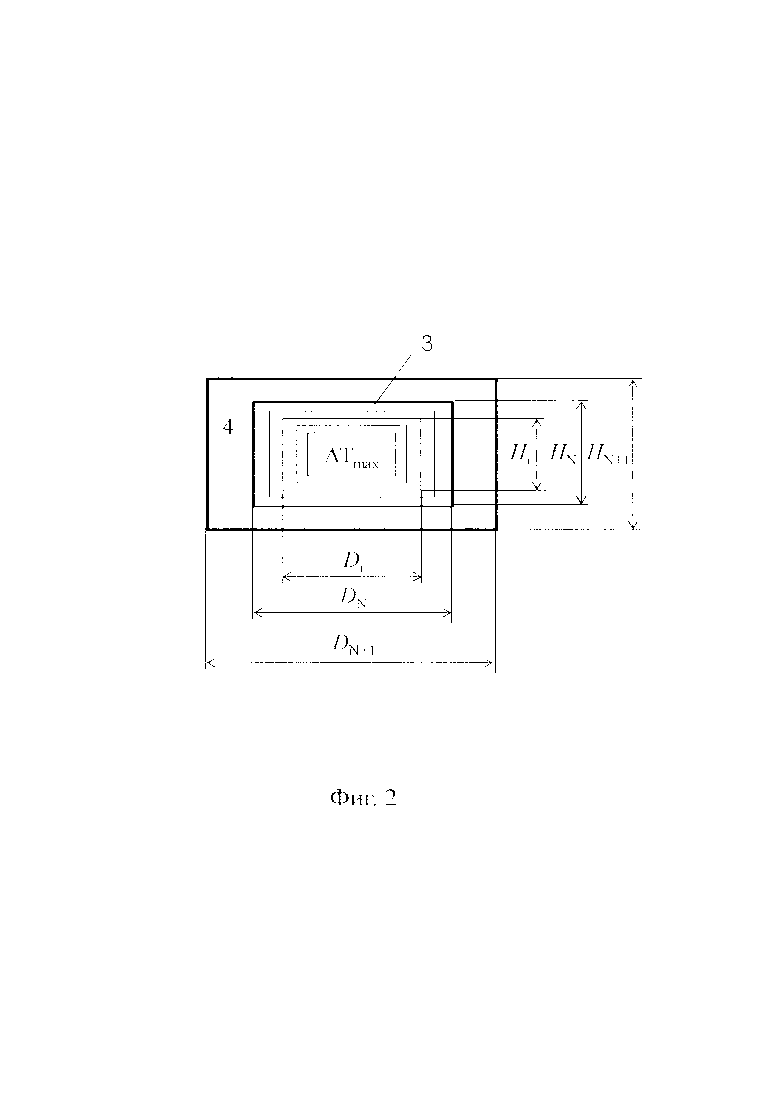
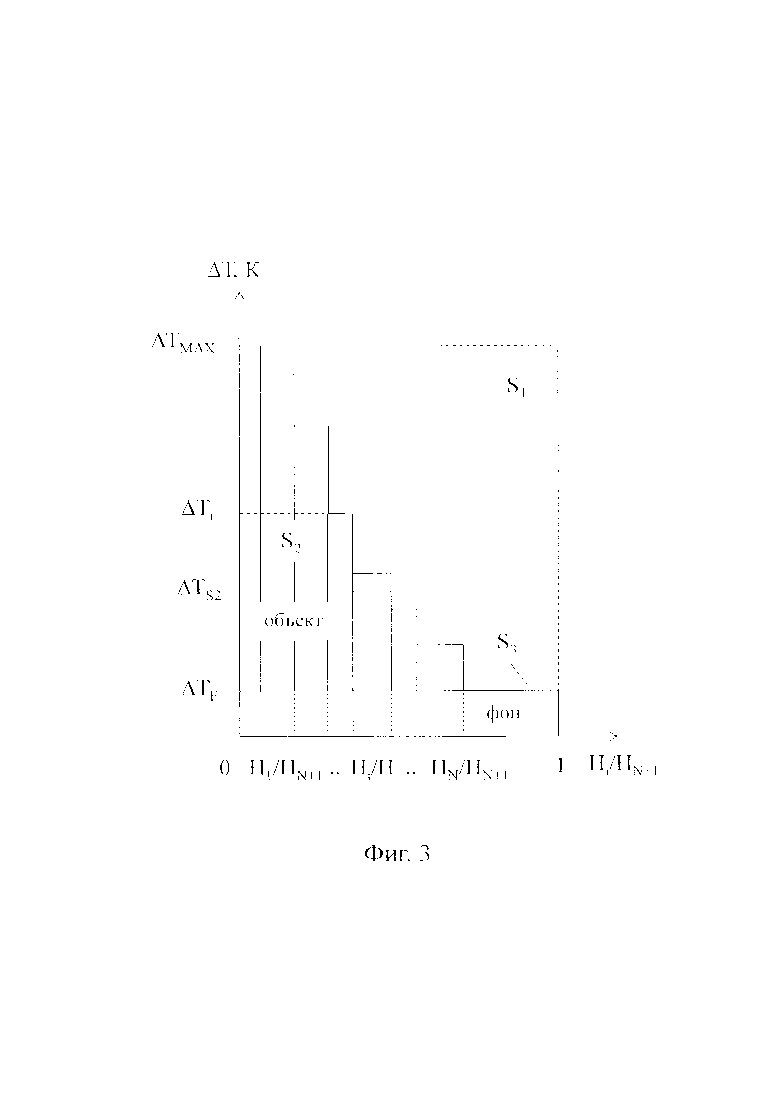
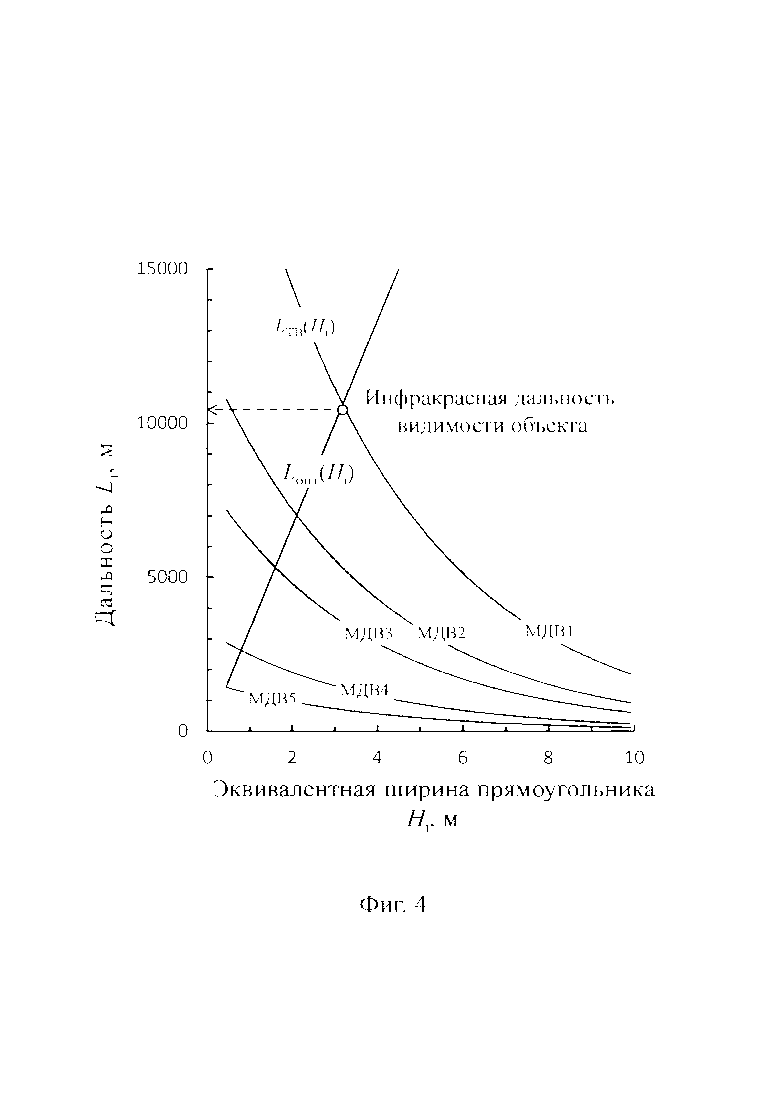
Для пояснения сущности предлагаемого способа на фиг. 1 представлен пример тепловизионного снимка, в котором: 1 - тепловизионный снимок, 2 - выделенный участок тепловой сигнатуры, 3 - объект, 4 - фон, окружающий объект. На фиг. 2 представлена эквивалентная тепло-геометрическая модель (мишень) анализируемого объекта 3 и фона 4 с разбиением объекта на N-квазиизотермических зон. На фиг. 3 представлен пример гистограммы функции распределения разности температур объекта 3 по размерам. На фиг. 4 представлены графические зависимости LTBi=ƒ(Hi) и LОПТi=ƒ(Hi), поясняющие алгоритм определения инфракрасной дальности видимости объекта графическим способом.
Формульное соотношение для показателя инфракрасной видности объекта на окружающем фоне находится следующим образом.
На получаемом в результате измерений тепловизионном снимке 1 (тепловом портрете) выделяется прямоугольный участок 2, внутри которого находится объект 3 и окружающий его фон 4 (фиг. 1). Для удобства анализа и достижения высокой достоверности выделение участка на снимке выполняется таким образом, чтобы площадь, занимаемая объектом 3, была приблизительно равна площади, занимаемой окружающим фоном 4. Далее выполняется разбиение тепловой сигнатуры объекта 3 на N зон - это возможно всегда, так как поверхность любого объекта всегда неизотермична. Количество зон, на которые разбивается объект 3, выбирается исходя из требуемой точности - чем больше зон, тем выше точность, при этом максимальное количество зон - не ограничено. После этого определяется средневзвешенная по площади анализируемого участка 2 температура окружающего фона TF, средневзвешенная амплитуда пространственных флуктуации температуры окружающего фона ΔTF, площадь каждой i-ой зоны Si, средняя температура Ti в каждой i-ой зоне и разность между ней и температурой окружающего фона (температурный перепад) ΔTi=Ti-TF.
Далее реальный объект 3 преобразуется в виртуальную тепло-геометрическую модель (прямоугольную мишень), представляющую собой набор подобных и концентрично вложенных друг в друга прямоугольников (фиг. 2), при этом каждый i-ый прямоугольник замещает (включает в себя)  квазиизотермических зон и обладает температурным перепадом
квазиизотермических зон и обладает температурным перепадом  который рассчитывается по соотношению
который рассчитывается по соотношению  . Площадь каждого i-ого прямоугольника рассчитывается по соотношению
. Площадь каждого i-ого прямоугольника рассчитывается по соотношению  . В геометрическом центре модели располагается прямоугольник с номером Ni=N1=1, обладающий самым высоким температурным перепадом
. В геометрическом центре модели располагается прямоугольник с номером Ni=N1=1, обладающий самым высоким температурным перепадом  , остальные прямоугольники накладываются концентрично друг на друга по мере убывания температуры, предпоследним располагается прямоугольник с номером Ni=N и площадью, равной площади объекта 3, т.е. SN=SΣ, и обладающии минимальным температурным перепадом, равным средневзвешенному температурному перепаду всего объекта 3, последним располагается прямоугольник с номером Ni=N+1, моделирующий окружающий фон 4, занимающий площадь, равную двум площадям объекта, т.е. SN+1=SΣ+SF=2SΣ и температурный перепад, равный средней амплитуде пространственных флуктуаций температуры окружающего фона 4, т.е. ΔTN+1=ΔTF. Размеры прямоугольников, моделирующих объект 3, задаются следующим образом:
, остальные прямоугольники накладываются концентрично друг на друга по мере убывания температуры, предпоследним располагается прямоугольник с номером Ni=N и площадью, равной площади объекта 3, т.е. SN=SΣ, и обладающии минимальным температурным перепадом, равным средневзвешенному температурному перепаду всего объекта 3, последним располагается прямоугольник с номером Ni=N+1, моделирующий окружающий фон 4, занимающий площадь, равную двум площадям объекта, т.е. SN+1=SΣ+SF=2SΣ и температурный перепад, равный средней амплитуде пространственных флуктуаций температуры окружающего фона 4, т.е. ΔTN+1=ΔTF. Размеры прямоугольников, моделирующих объект 3, задаются следующим образом:
- ширина i-го прямоугольника находится из соотношения:
- длина i-го прямоугольника - из соотношения:
где
D - длина исследуемого объекта,
а размеры последнего прямоугольника, моделирующего окружающий фон 4, определяются по соотношениям:

Далее строится гистограмма функции распределения по размерам температурного перепада для выделенного виртуального прямоугольного участка снимка 2, как показано на фиг 3.
Гистограмма функции распределения температурного перепада по размерам строится следующим образом. По оси абсцисс откладывается значение безразмерной ширины i-го прямоугольника Ni/HN+1 по оси ординат - перепад температуры i-ой зоны  , где i=1,N+1. Безразмерная ширина используется для достижения единства показателя видности для любых объектов и для обеспечения возможности их сравнения по данному показателю. Вид получаемой гистограммы представлен на фиг. 3. На указанной диаграмме площадь S1=ΔTMAX⋅1 - общая площадь гистограммы, площадь
, где i=1,N+1. Безразмерная ширина используется для достижения единства показателя видности для любых объектов и для обеспечения возможности их сравнения по данному показателю. Вид получаемой гистограммы представлен на фиг. 3. На указанной диаграмме площадь S1=ΔTMAX⋅1 - общая площадь гистограммы, площадь  - площадь, формируемая температурным полем объекта 3, площадь S3=ΔTF⋅1 - площадь, формируемая пространственными флуктуациями температуры окружающего фона 4.
- площадь, формируемая температурным полем объекта 3, площадь S3=ΔTF⋅1 - площадь, формируемая пространственными флуктуациями температуры окружающего фона 4.
Отношение площадей S2/S1 является характеристикой неизотермичности объекта 3, причем, чем выше значение указанного отношения, тем лучше изотермичность объекта 3, и наоборот, чем оно меньше, тем более неравномерно температурное поле объекта 3, с одной стороны.
С другой стороны, данное отношение является характеристикой внутренней энергии объекта 3, как открытой термодинамической системы: чем оно больше, тем выше внутренняя энергия системы (объекта), и наоборот - чем оно меньше, тем ниже энергетическое состояние объекта 3.
Найдем отношение площади S2 к площади (S1-S2), которое обозначим KTB. Из фиг. 3 следует, что данное отношение равно:
где
 - разность между средневзвешенной температурой объекта 3 и средневзвешенной температурой фона 4;
- разность между средневзвешенной температурой объекта 3 и средневзвешенной температурой фона 4;
ΔTMAX - максимальная разность температуры объекта 3 и окружающего фона 4 (разность между наиболее высокой локальной температурой объекта и средней температурой фона).
Согласно теории вероятностей отношение площадей S2/(S1-S2) показывает, как соотносятся вероятности промаха и попадания в тепловую мишень, которой является объект 3. Поэтому данное соотношение можно правомерно принять в качестве основной расчетной формулы для количественной оценки инфракрасной видности объекта, а коэффициент KTB считать показателем инфракрасной видности объекта. Указанное соотношение для инфракрасной видности справедливо как для объекта 3 в целом, так и для отдельно взятой его зоны. При этом, для определения инфракрасной видности конкретной зоны объекта 3 в вышеуказанном расчетном соотношении вместо средневзвешенной температуры объекта ΔT необходимо использовать средневзвешенную температуру рассматриваемой зоны  .
.
Из полученного выше соотношения для показателя инфракрасной видности следует, что его теоретическое значение для различных реальных объектов может изменяться в широких пределах: от нулевого значения для абсолютно неконтрастных в тепловом отношении объектов до значений в несколько единиц для сильноконтрастных объектов. На практике значения указанного коэффициента изменяются в пределах 0,5-2,5.
Таким образом, для установления инфракрасной видности объекта необходимо зарегистрировать температурное поле объекта 3 и температуру окружающего его фона 4, по измеренному температурному полю определить максимальную температуру объекта 3, средневзвешенную по поверхности температуру объекта 3 и ее отличие от температуры окружающего фона 4.
Для измерения температурного поля сложных или протяженных техногенных объектов в наибольшей степени пригодны тепловизионные средства измерения, снабженные объективами с широким углом поля зрения. Этим обеспечивается возможность измерения объекта с минимальных расстояний, что гарантирует высокую точность измерения температуры и минимизирует погрешность, обусловленную поглощением излучения объекта промежуточной средой - окружающим фоном. Как показывает практика, целесообразно использовать объективы с угловым полем зрения не менее 12×16°. При измерениях следует иметь в виду, что спектральный коэффициент излучения окружающего фона 4 зачастую неизвестен, поэтому абсолютное значение температуры окружающего фона при измерениях тепловизионными средствами может отличаться от его действительной температуры. В связи с этим, для достижения высокой точности измерений температуры окружающего фона 4 ее необходимо дополнительно измерять контактными средствами измерения и затем по измеренному значению выполнять корректировку показаний тепловизора путем подбора значений его установочных параметров вплоть до выполнения равенства значений температуры фона, измеренных контактным средством и тепловизором. В то же время, амплитуду пространственных флуктуации температуры окружающего фона необходимо и возможно измерять только тепловизором, так как данное средство является единственным средством измерения, которое не искажает тепловое поле окружающего фона 4.
Для получения расчетного соотношения для инфракрасной дальности видимости объекта 3 аналогично показателю его инфракрасной видности введем в употребление термин - показатель инфракрасной видности фона 4 KTBF. Расчетное соотношение для него по аналогии с объектом имеет вид:
где
ΔTF - средняя амплитуда пространственных флуктуации температуры окружающего фона 4, регистрируемая тепловизионным средством измерения.
В соотношениях для показателей инфракрасной видности объекта 3 и фона 4 фигурирует измеряемый параметр разности температуры, закон изменения которого в зависимости от дистанции до объекта измерения описывается известным законом Бугера-Ламберта-Бера (1729 г.) (Ллойд Дж. Системы тепловидения / Пер. с англ. / М: Мир, 1978. - 414 с.; с. 31, 43):
ΔTi=ΔTi⋅exp(-αLV),
где
a - показатель ослабления излучения окружающим фоном;
LV - дистанция визирования объекта 3.
Вполне обоснованно считать, что данному закону подчиняется и зависимость выведенного показателя инфракрасной видности от дистанции визирования. Исходя из этого, для дистанции визирования, равной инфракрасной дальности видимости LV=LTB, справедливо следующее соотношение:
KTBF=KTBexp(-αLTB),
из которого следует расчетное соотношение для инфракрасной дальности видимости в режиме ограничения фоном:
Показатель ослабления α излучения объекта 3 окружающим фоном 4 для разных метеорологических условий может быть определен по значению известного параметра - метеорологической дальности видимости (МДВ), согласно определению которой, она соответствует дистанции, на которой плотность потока излучения в 50 раз меньше своего первоначального значения. Из определения МДВ и вышеупомянутого закона Бугера-Ламберта-Бера следует следующее соотношение для показателя ослабления: α=3,91/МДВ. Таким образом, окончательное расчетное соотношение для инфракрасной дальности видимости имеет вид:

К аналогичному соотношению для инфракрасной дальности видимости приводит и другой способ его вывода. Приведем его.
Согласно эмпирическому психофизиологическому закону, используемому теорией сенсорной чувствительности (Забродин Ю.М. Введение в общую теорию сенсорной чувствительности // Психофизические исследования / Под ред. Б.Ф. Ломова, Ю.М. Забродина, М., 1977; Забродин Ю.М., Лебедев А.Н. Психофизиология и психофизика. - М.: Наука, 1977), полученному в 19 веке немецкими учеными Г. Фехнером (1858 г.) и Э. Вебером (1834 г.), сила (интенсивность) ощущения пропорциональна натуральному логарифму интенсивности раздражителя. Математически данный закон записывается в виде:
S=k⋅lnJ+C,
где
S - величина ощущения;
J - интенсивность раздражителя;
k, С - константы (k - константа Вебера).
Преобразуем данную формулу. Учитывая, что при интенсивности раздражителя, равной абсолютному порогу (J=J0), ощущение исчезает (S=0), из предыдущей формулы следует:
0=S=k⋅lnJ0+C→C=-k⋅lnJ0
Подставив значение константы С в исходный закон, получаем:
Представим величину ощущения как произведение модуля единичной силы  на длину виртуального рычага (дистанцию визирования) L, к которому она приложена, с учетом этого преобразуем последнее соотношение, получаем:
на длину виртуального рычага (дистанцию визирования) L, к которому она приложена, с учетом этого преобразуем последнее соотношение, получаем:
где
k* - размерная константа, рассчитываемая по соотношению k⋅LN;
LN - некая нормируемая дистанция.
Применительно к задаче инфракрасной видности вполне закономерно в качестве характеристики интенсивности раздражителя взять показатель инфракрасной видности объекта KTB, а в качестве характеристики пороговой интенсивности - соответствующий фоновому излучению показатель инфракрасной видности фона KTBF. Константа Вебера k является характеристикой передаточной функции системы, в которой распространяется воздействие (сигнал), а фактически - безразмерным показателем ослабления сигнала средой, разделяющей раздражитель (объект) и анализатор (наблюдатель). К примеру, по данным Э. Вебера для небольших расстояний, когда в качестве анализатора выступает человек, при его слуховом восприятии k принимается равным k=0,1; при зрительном восприятии - k=0,01. Для технических систем инфракрасного наблюдения нормируемой величиной LN является метеорологическая дальность видимости (МДВ), из определения которой следует соотношение для показателя ослабления излучения α=3,91/МДВ=1/k*. Из соотношения для параметра α следует, что значение константы Вебера k при восприятии объекта инфракрасными техническими системами равно: k=1/3,91≈0,256.
В результате второй способ вывода дает абсолютно идентичный результат - точно такое же соотношение для расчета инфракрасной дальности видимости объекта 3 (в режиме ограничения тепловыми флуктуациями фона 4):

Представленное выше соотношение позволяет рассчитать теоретическую инфракрасную дальность видимости объекта, но не его фактическую инфракрасную дальность видимости конкретным средством измерения. Получаемые по данному соотношению результаты подразумевают применение идеального оптического (инфракрасного) анализатора, обладающего неограниченным угловым разрешением. На практике все инфракрасные средства измерения имеют ограниченное оптическое угловое разрешение, поэтому практическую ценность представляет определение инфракрасной дальности видимости объекта с учетом оптической разрешающей способности конкретно взятого анализатора, т.е. - определение фактической инфракрасной дальности видимости конкретным инфракрасным средством измерения. Для решения данной задачи выполним следующее.
С одной стороны, с точки зрения инфракрасной видности, при приближении сильно удаленного объекта к наблюдателю сначала регистрируется (видится) участок (зона) объекта 3, имеющий самую высокую температуру (самый высокий температурный перепад по отношению к фону), по мере дальнейшего приближения объекта становятся видными участки с менее высокой температурой, и лишь на самом малом расстоянии становятся видными участки с минимальным температурным перепадом. Как правило, у большинства техногенных объектов их участки с максимально высокой температурой имеют малые размеры и, с точки зрения инфракрасной видности, регистрируются в первую очередь. Корпуса объектов по абрису, имеют самые большие размеры и, как правило, минимальный температурный перепад по отношению к фону, поэтому видятся в последнюю очередь, т.е - на малых дистанциях.
С другой стороны, с точки зрения оптической видности, при приближении сильно удаленного объекта к наблюдателю имеет место противоположная картина - сначала регистрируется самый больший размер (весь объект, корпус, абрис), по мере его дальнейшего приближения начинают различаться малоразмерные участки, и лишь на самом малом расстоянии начинают различаться мелкие детали объекта.
Из этого следует, что графические зависимости инфракрасной и оптической видности от размера объекта (или его зоны) противоположны друг другу, поэтому при определенном размере объекта, назовем его - критический размер, должны пересекаться. Вполне логично дальность, соответствующую данному критическому размеру, принять за фактическую инфракрасную дальность видимости объекта.
Для нахождения фактической инфракрасной дальности видимости объекта 3 согласно данному утверждению необходимо в одной прямоугольной системе координат построить следующие графические зависимости:
- зависимость инфракрасной дальности видимости LTBi от ширины прямоугольника Hi тепло-геометрической модели, т.е. LTBi=ƒ(Hi);
- зависимость оптической дальности видимости LОПТi от ширины прямоугольника Hi тепло-геометрической модели, т.е. LОПТi=ƒ(Hi),
после чего найти точку их пересечения, ординату которой принять за фактическую инфракрасную дальность видимости всего объекта 3.
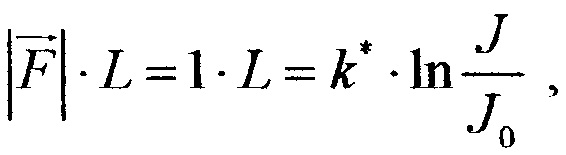
Для построения данных зависимостей необходимо и целесообразно по указанным выше соотношениям рассчитать исходные данные и занести их в таблицу 1, например, следующего вида:
Расчет дистанции оптической дальности видимости выполняется по известному соотношению (Ллойд Дж. Системы тепловидения / Пер. с англ. / М.: Мир, 1978. - 414 с.; С. 357-361]:
LОПТi=Hi/(γNP)
где
Hi - размер i-го объекта (ширина i-го прямоугольника тепло-геометрической модели), м;
γ - угловое разрешение инфракрасного средства измерения (тепловизора), рад;
NP - минимальное количество пикселей матрицы тепловизора, на которые проецируется объект, и которое достаточно для видности объекта наблюдателю.
В предлагаемом техническом решении количество пикселей NP, достаточное для инфракрасной видности объекта, рекомендуется принимать равным единице (NP=1) для протяженных объектов, имеющих отношение длины к ширине Di/Hi>2 и равным двум (NP=2) для коротких объектов, у которых отношение длины и ширины находится в пределах 1≤Di/Hi≤2 - здесь имеется ввиду длина Di и ширина Hi эквивалентного прямоугольника тепло-геометрической модели объекта. Например, для протяженных техногенных объектов, таких как надводные корабли, самолеты, ракеты можно рекомендовать использовать значение NP=1, а для менее протяженных (вертолетов, беспилотных летательных аппаратов и автомобилей и др.) -рекомендовать значение NP=2.
Пример графических зависимостей LTBi=ƒ(Hi) и LОПТi=ƒ(Hi), построенных в одной системе координат, представлен на фиг. 4, где показано, что фактическая инфракрасная дальность видимости объекта 3 для конкретно взятой МДВ - есть ордината точки пересечения зависимости LTBi=ƒ(Hi), соответствующей данной МДВ, и зависимости LОПТi=ƒ(Hi).
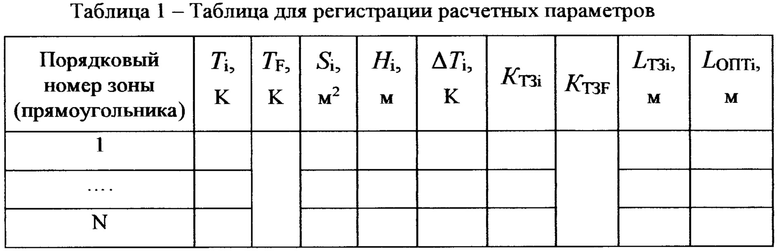
Расчет неопределенности (погрешности) измерения показателя инфракрасной видности и фактической инфракрасной дальности видимости объекта.
Для оценки искомой неопределенности, в качестве примера, возьмем:
- тепловизор со следующими метрологическими и техническими характеристиками: угловое поле зрения - 12×16°, угловое разрешение γ=0,9 мрад, относительная погрешность измерения температуры в диапазоне 0÷100°C - δT=0,01 (1%), температурная чувствительность γT=0,03 К, матрица болометрического типа с размером 320×280 пикселей;
- объект 3, обладающий максимальной температурной разницей относительно фона ΔTMAX=50 K и средней по его поверхности разнице температуры относительно фона ΔT=3 K;
- температура фона 4 равна TF=293 K (20°С) и измерена термопарным преобразователем с относительной погрешностью δF=0,03 (3%);
- средневзвешенная амплитуда пространственных флуктуации температуры окружающего фона, измеренная тепловизором, равна ΔTF=0,3 K.
Для взятых исходных данных относительная погрешность измерения показателя инфракрасной видности объекта (при условии качественной корректировки показаний тепловизора на поглощение излучения окружающим фоном) составляет ~5%, т.е.:
Относительная погрешность измерения показателя инфракрасной видности фона составляет:
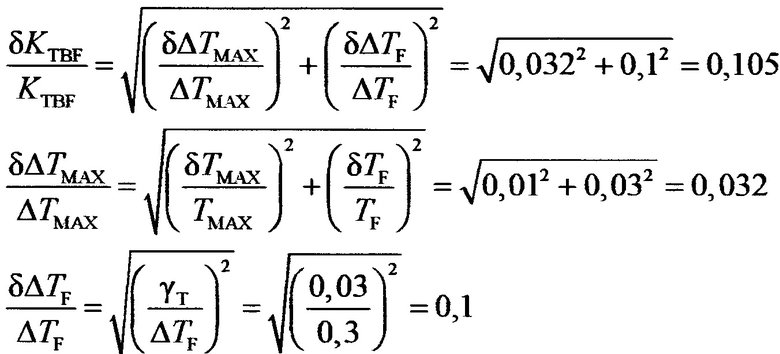
Относительная погрешность измерения инфракрасной дальности видимости:

Как видно, для инфракрасной дальности видимости данная погрешность составляет ~11%, что в рамках поставленной цели является значимым достижением, так как существенно превосходит все известные достигнутые результаты в данной области измерений.
ПРИМЕР ОСУЩЕСТВЛЕНИЯ СПОСОБА
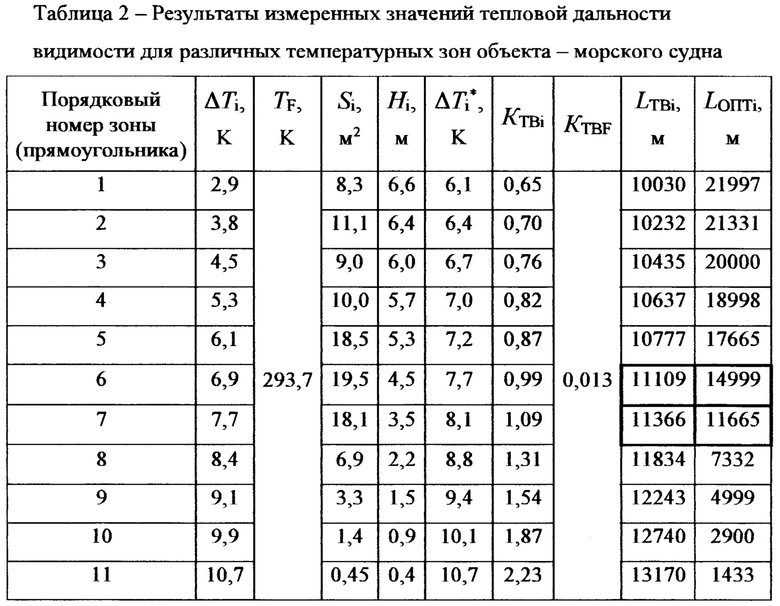
Согласно предложенному способу, например, измеряется инфракрасная дальность видимости надводного морского судна (объект 3) с габаритным горизонтальным размером 51 м. Измерения выполняются в спектральном диапазоне 8-14 мкм тепловизором с угловым полем зрения 12×16°, пространственным разрешением γ=10-3 рад и температурной чувствительностью 0,08 K. Угол линии визирования составляет 90° по отношению к горизонтальной бортовой линии, дистанция визирования 300 м, МДВ=10 км. В результате измерений зарегистрирован тепловой портрет (снимок 1) судна и окружающего его пригоризонтного атмосферного фона 4. Тепловая сигнатура судна разбивается на 11 квазиизотермических температурных зон, количество пикселей, достаточное для видения объекта, принимается равным NP=1. В результате обработки по представленным выше соотношениям получены следующие значения тепловой дальности видимости (табл. 2).
Ордината точки пересечения зависимостей LTB(Hi) и LОПТ(Hi) оказалась равной 11200 м, что, согласно предложенному способу, соответствует инфракрасной дальности видимости объекта. При этом, инфракрасная дальность видимости, измеренная этим же тепловизором непосредственно традиционным натурным способом (путем регистрации излучения объекта по мере удаления от него) составила 10000 м. Расхождение в данных, полученных двумя способами, составило δ=12%. Следует заметить, что точность может быть улучшена за счет использования более чувствительного тепловизора.
Таким образом, использование предложенного технического решения значимо улучшает достигнутые результаты в области инфракрасных технологий, в разы повышает точность получаемых данных об инфракрасной видности техногенных и биологических объектов, позволяет выполнить сравнение разных объектов по степени их тепловой защиты и инфракрасной дальности видимости, и, что особенно важно, обеспечивает получение информации о тепловой уязвимости объекта и разработку дополнительных превентивных мер защиты объекта на стадии ввода его в эксплуатацию.
В предложенном способе впервые учитывается неизотермичность исследуемого объекта, а измерения выполняются с близких дистанций. Так как измерения выполняются только один раз и с одной дистанции, поэтому значимо снижаются временные и экономические затраты на испытания объекта на предмет его инфракрасной видности. Использование способа позволяет значительно сократить объем работ, необходимый для выполнения испытаний качества тепловой защиты объектов, и как результат - ощутимое снижение трудовых и финансовых затрат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБСЛЕДОВАНИЯ ПОВЕРХНОСТИ ОБЪЕКТА ИНФРАКРАСНЫМ ПРИБОРОМ | 2016 |
|
RU2659457C2 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО КОНТРОЛЯ В ВИДИМОМ И ИНФРАКРАСНЫХ ДИАПАЗОНАХ СПЕКТРА | 2005 |
|
RU2299522C1 |
| Способ определения метеорологической дальности видимости | 2018 |
|
RU2692822C1 |
| ТЕПЛОВИЗИОННАЯ СИСТЕМА ДЛЯ ПРОВЕДЕНИЯ НАРУЖНОЙ ТЕПЛОВИЗИОННОЙ СЪЕМКИ | 2014 |
|
RU2575798C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЯРКОСТНЫХ ХАРАКТЕРИСТИК ОБЪЕКТОВ В ОПТИЧЕСКОМ ДИАПАЗОНЕ СПЕКТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378625C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕЙ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ ПО ПРИЗНАКАМ "СЛЕДА В АТМОСФЕРЕ" ЛЕТЯЩЕГО В СТРАТОСФЕРЕ С ГИПЕРЗВУКОВОЙ СКОРОСТЬЮ "РАДИОНЕЗАМЕТНОГО" ОБЪЕКТА | 2017 |
|
RU2689783C2 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| Способ формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными ГСН, включающий комплекс известных устройств для его осуществления и визуализации | 2019 |
|
RU2726026C1 |
| Способ обнаружения несанкционированного сброса сточных вод в речной водоток с применением тепловизионного оборудования | 2024 |
|
RU2831517C1 |
| СПОСОБ ОЦЕНКИ РАЗЛИЧИЯ ТЕПЛОФИЗИЧЕСКИХ ПАРАМЕТРОВ ВИДИМОЙ ПОВЕРХНОСТИ ИЗОТРОПНОГО ОБЪЕКТА С УЧЕТОМ ФОНА | 2013 |
|
RU2544894C1 |
Изобретение относится к измерительной технике, в частности к измерениям и классификации тепловых полей объектов с использованием инфракрасных средств измерений, и предназначено для использования при испытаниях инфракрасной видности техногенных и биологических объектов. Способ заключается в тепловизионной регистрации тепловой сигнатуры исследуемого объекта на окружающем фоне, замене исходной тепловой сигнатуры объекта эквивалентной тепло-геометрической моделью и обработке параметров модели по специально выведенным соотношениям. Инфракрасная дальность видимости объекта измеряется с учетом значений показателей инфракрасной видности объекта и фона, а также дальности оптической видимости объекта. Технический результат - повышение точности измерения инфракрасной дальности видимости, достижение единства измерений показателя инфракрасной видности для всех видов техногенных и биологических объектов с одновременным обеспечением возможности сравнения объектов по их тепловой защите, повышение эффективности теплового поиска объектов. 4 ил., 2 табл.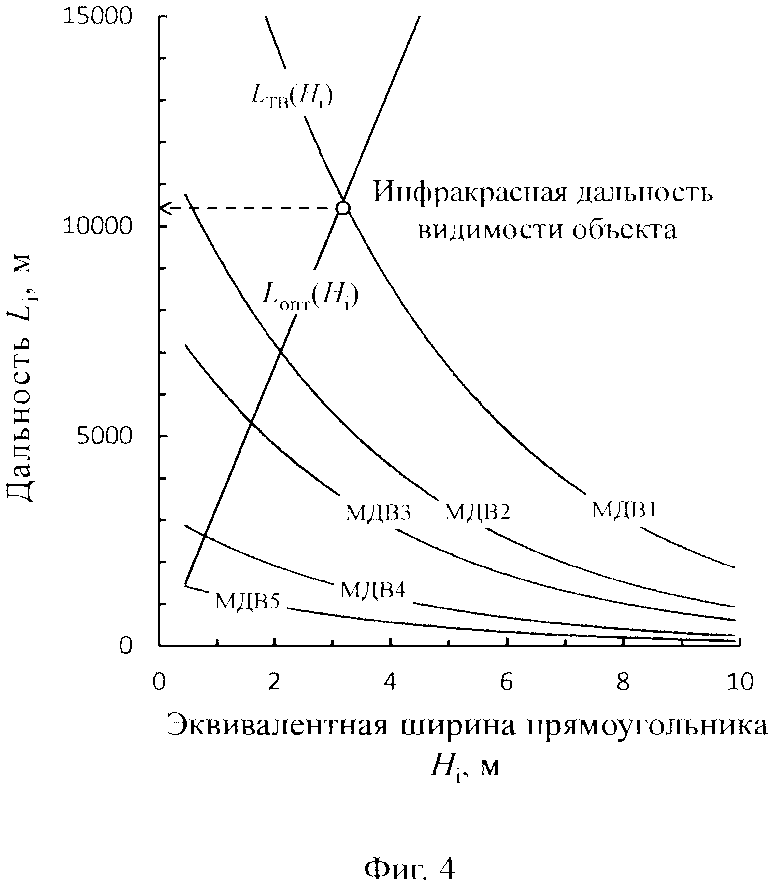
Способ измерения показателя инфракрасной видности и инфракрасной дальности видимости объекта, включающий регистрацию его излучения тепловизионным средством измерения с широким оптическим углом поля зрения, согласно которому направление ракурса и дистанцию визирования выбирают таким образом, чтобы площади проекций объекта и окружающего фона на приемную матрицу тепловизора были приблизительно одинаковы, выполняют регистрацию тепловой сигнатуры ситуационной картины объекта, корректируют тепловизионную сигнатуру по измеренной температуре окружающего фона путем подбора установочных параметров тепловизионного снимка до достижения равенства измеренной температуры окружающего фона ее фактическому значению, выделяют объект на полученной сигнатуре путем определения границ проекции объекта на температурной матрице сигнатуры, используют выделенную проекцию и по известным угловому полю зрения тепловизора γ, длине объекта D либо дистанции LV до него определяют визируемую площадь SΣ объекта, его локальную максимальную температуру TMAX, среднюю температуру окружающего фона TF, разность температур ΔTMAX=TMAX-TF и средневзвешенную амплитуду пространственных флуктуаций температуры фона ΔTF, разбивают выделенную проекцию объекта на N квазиизотермических зон, при этом добиваются максимально возможного количества зон N с соблюдением условия, чтобы площадь зоны с максимальной температурой была не меньше площади, приходящейся на один пиксельный элемент матрицы тепловизора при данной дистанции визирования, находят площадь каждой температурной зоны Si и соответствующую ей среднюю температуру Ti, формируют эквивалентную теплогеометрическую модель (мишень) объекта в виде комбинации из N геометрически подобных прямоугольников, концентрично уложенных друг на друга, при этом эквивалентную ширину Hi каждого i-го прямоугольника рассчитывают по соотношению  , а его длину Di - по соотношению Di=Hi⋅D2/SΣ, в центре модели располагают прямоугольник с порядковым номером i=1, имеющий максимальную температуру из набора полученных значений Ti, описывают его следующим i+1 прямоугольником, имеющим меньшую температуру Ti+1, удовлетворяющую условию Ti+2<Ti+1<Ti, последним располагают прямоугольник с порядковым номером N, имеющий минимальную температуру из набора значений Ti, затем рассчитывают эквивалентную разность ΔTi средней температуры i-го прямоугольника Ti и температуры окружающего фона TF по соотношению
, а его длину Di - по соотношению Di=Hi⋅D2/SΣ, в центре модели располагают прямоугольник с порядковым номером i=1, имеющий максимальную температуру из набора полученных значений Ti, описывают его следующим i+1 прямоугольником, имеющим меньшую температуру Ti+1, удовлетворяющую условию Ti+2<Ti+1<Ti, последним располагают прямоугольник с порядковым номером N, имеющий минимальную температуру из набора значений Ti, затем рассчитывают эквивалентную разность ΔTi средней температуры i-го прямоугольника Ti и температуры окружающего фона TF по соотношению  , по соотношению
, по соотношению  рассчитывают значения показателя инфракрасной видности каждого i-го прямоугольника, при этом значение показателя для N-го прямоугольника принимают в качестве показателя инфракрасной видности всего объекта, задают значение метеорологической дальности видимости МДВ, после этого для каждого i-го прямоугольника рассчитывают значения инфракрасной дальности видимости LTBi по соотношению
рассчитывают значения показателя инфракрасной видности каждого i-го прямоугольника, при этом значение показателя для N-го прямоугольника принимают в качестве показателя инфракрасной видности всего объекта, задают значение метеорологической дальности видимости МДВ, после этого для каждого i-го прямоугольника рассчитывают значения инфракрасной дальности видимости LTBi по соотношению  , выбирают тип интересующего инфракрасного приемника, из его технических характеристик находят угловое разрешение γ, задают минимальное количество чувствительных элементов NP приемника, на которые при измерении должен проецироваться объект, рассчитывают значения оптической дальности видимости каждого i-го прямоугольника по соотношению LОПТi=Hi/(γ⋅NP), затем в одной прямоугольной системе координат строят графики зависимостей LTBi=ƒ(Hi) и LОПТi=ƒ(Hi), при этом по оси абсцисс откладывают значения эквивалентной ширины Hi, а по оси ординат - значения дальностей видимости LTBi и LОПТi, находят точку пересечения данных графических зависимостей и ее ординату, значение которой принимают за фактическую инфракрасную дальность видимости объекта.
, выбирают тип интересующего инфракрасного приемника, из его технических характеристик находят угловое разрешение γ, задают минимальное количество чувствительных элементов NP приемника, на которые при измерении должен проецироваться объект, рассчитывают значения оптической дальности видимости каждого i-го прямоугольника по соотношению LОПТi=Hi/(γ⋅NP), затем в одной прямоугольной системе координат строят графики зависимостей LTBi=ƒ(Hi) и LОПТi=ƒ(Hi), при этом по оси абсцисс откладывают значения эквивалентной ширины Hi, а по оси ординат - значения дальностей видимости LTBi и LОПТi, находят точку пересечения данных графических зависимостей и ее ординату, значение которой принимают за фактическую инфракрасную дальность видимости объекта.
| FR 2969273 A1, 22.06.2012 | |||
| CN 103453995 A, 18.12.2013 | |||
| CN 104730537 A, 24.06.2015 | |||
| СПОСОБ ПРОЛОНГИРОВАННОЙ ХИМИОПРОФИЛАКТИКИ ПИРОПЛАЗМИДОЗОВ (ПИРОПЛАЗМОЗ, БАБЕЗИОЗ И ТЕЙЛЕРИОЗ) КРУПНОГО РОГАТОГО СКОТА | 2000 |
|
RU2259821C2 |
| JP 2008135856 A, 12.06.2008 | |||
| KR 2015109083 A, 01.10.2015. | |||

