Изобретение относится к измерительной технике и может быть использовано для автоматизированного контроля состояния конструкции здания или инженерно-строительного сооружения в процессе его эксплуатации, позволяющего, в частности, своевременно выявлять деформации конструкций и предупреждать их разрушение.
Известен способ контроля состояния элементов строительных конструкций [Ренский А.Б. Руководство по тензометрированию строительных конструкций и материалов. М., 1971 г., стр. 133], основанный на том, что периодически проводят замеры деформаций элементов конструкции посредством тензометрических датчиков, установленных в опасных сечениях.
Недостатком способа является относительно низкая точность, обусловленная субъективностью снятия показаний с датчиков, и ручная обработка информации.
Известен также способ автоматизированного сбора тензометрической информации от датчиков, размещенных на инженерно-строительных сооружениях [Ренский А.Б. Руководство по тензометрированию строительных конструкций и материалов. М., 1971 г., стр. 149-155], характеризующийся тем, что поочередно подключают сигналы от датчиков к блоку измерения, преобразуют сигналы в цифровую форму и обрабатывают их в вычислительной машине.
По сравнению с ручным способом автоматизированная обработка результатов измерений обеспечивает повышение надежности результатов измерений за счет возможности увеличения количества измерений, устранения субъективных ошибок измерений и более полного использования полученной информации за счет глубокой обработки данных.
Аналогом заявляемого способа является способ дистанционного контроля и диагностики состояния конструкций и инженерных сооружений [RU 2247958, С2, G01M 5/00, 10.03.2005], заключающийся в том, что на пункте контроля регистрируют сигналы с блоков измерения, установленных в местах диагностирования конструкции, сравнивают их с заранее зафиксированными значениями, и по отклонению поступивших сигналов от заранее зафиксированных судят о наличии изменений контролируемых параметров, причем, изготавливают элемент конструкции из того же материала, что и вся конструкция, размещают на нем блоки измерения, проводят метрологическую аттестацию элемента с размещенными на нем блоками измерения путем установления зависимостей между сигналами с блоков измерения и калиброванными внешними воздействиями, регистрируют эти зависимости на пункте контроля и используют их в качестве заранее зафиксированных сигналов, при этом врезают элемент с установленными на нем блоками измерения в места диагностирования конструкции и по отклонению поступивших сигналов с блоков измерения от заранее зарегистрированных сигналов судят о состоянии конструкции.
Этот способ отличается относительно высокой сложностью, обусловленной необходимостью изготовления элементов конструкции из того же материала, что и вся конструкция.
Известен также способ диагностирования состояния конструкции [RU 2395786, C1, G01B 7/16, 27.07.2010], согласно которому определяют как минимум один локальный участок вероятного возникновения дефекта, устанавливают на этом участке датчик и по его показаниям определяют состояние конструкции, причем датчик представляет собой основу, на которую нанесен цветовой индикатор, в качестве которой используют материал из графитизированных углеродных волокон на основе полиакрилонитрила, а в качестве цветового индикатора жидкокристаллический полимер, способный изменять свой цвет в зависимости от изменения электрического сопротивления основы, при этом датчик с натягом фиксируют на покрытом отверждаемым связующим исследуемом локальном участке до отверждения связующего, а для определения состояния локального участка к датчику подсоединяют источник тока и определяют напряженно-деформируемое состояние диагностируемой конструкции по экспериментально определенной зависимости цвета цветового индикатора от деформации.
Однако устройство не обеспечивает наглядности представления информации, что снижает оперативность реагирования на аварийную ситуацию, и предназначено преимущественно для отслеживания состояния конструкций трубопроводов.
Еще одним аналогом предложенного является способ контроля состояния конструкции здания или инженерно-строительного сооружения [RU 2327105, С2, G01B 7/16, G01M 7/00, 20.06.2008], согласно которому осуществляют опрос датчиков, установленных в местах диагностирования конструкции, преобразуют полученную с датчиков информацию и передают ее на пункт контроля, выполненного в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, причем формируют условное изображение контролируемого объекта, повторяющее его конструкцию, размещают на нем в местах, соответствующих реальному расположению датчиков, цветные метки-индикаторы, выводят упомянутое изображение с метками-индикаторами на экран компьютера, обеспечивают постоянную связь упомянутых меток-индикаторов с датчиками, в качестве фиксированной величины для каждого датчика используют полученное путем предварительных расчетов предельное допустимое значение измеряемого параметра, а результаты опроса датчиков и результаты сравнения последней принятой с них информации отражают в реальном времени через цвет меток-индикаторов и его смену на условном изображении объекта, по которому судят об исправности датчиков и состоянии конструкции, причем в качестве датчиков используют тензометрические датчики.
Недостатком наиболее близкого технического решения является относительно узкая область применения, обусловленная тем, что при контроле состояния конструкции здания или инженерно-строительного сооружения используется информация от тензометрических датчиков, которая позволяет формировать информацию только о напряжениях, возникающих в датчиках, которые могут соответствовать напряжениям в конструкции в местах установки датчиков, но это не позволяет формировать информацию о деформациях, возникающих в конструкции в целом и на отдельных ее участках. Это снижает качество контроля состояния конструкции здания или инженерно-строительного сооружения.
Наиболее близким по технической сущности к предложенному является способ контроля состояния конструкции инженерно-строительного сооружения [RU 2327105, С2, G01B 7/16, G01M 7/00, 20.06.2008], согласно которому в местах диагностирования контролируемой конструкции размещают датчики, осуществляют опрос датчиков, преобразуют полученную от датчиков информацию и передают ее на пункт контроля, выполненного в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, причем, датчики выполняют с возможностью получения от них информации о их пространственном положении, в пункте контроля формируют условное изображение контролируемой конструкции и фиксируют изменения пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей, а по результатам сравнения этих отклонений с заранее введенными в память компьютера фиксированными величинами, соответствующими их допустимым значениям, судят о состоянии контролируемой конструкции, условное изображение контролируемой конструкции выполняют в виде расчетной схемы контролируемой конструкции, а фиксацию изменений пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей, производят при различных нагружениях контролируемой конструкции.
Недостатком способа является относительно низкая точность определения изменений пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей. Это снижает качество контроля.
Задачей заявляемого изобретения является повышение качества контроля путем повышения точности определения изменений пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей.
Требуемый технический результат заключается в повышении качества контроля.
Поставленная задача решается, а требуемый технический результат достигается тем, что в способе, согласно которому в местах диагностирования контролируемой конструкции размещают датчики, осуществляют опрос датчиков, преобразуют полученную от датчиков информацию и передают ее на пункт контроля, выполненного в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, причем, датчики выполняют с возможностью получения от них информации о их пространственном положении, в пункте контроля формируют условное изображение контролируемой конструкции и фиксируют изменения пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей, а по результатам сравнения этих отклонений с заранее введенными в память компьютера фиксированными величинами, соответствующими их допустимым значениям, судят о состоянии контролируемой конструкции, согласно изобретению, каждый из датчиков, которые размещают в местах диагностирования контролируемой конструкции, выполняют в виде трехосного гироскопа и трехосного акселерометра, расположенных на горизонтальной платформе, которую периодически поворачивают на угол 180°.
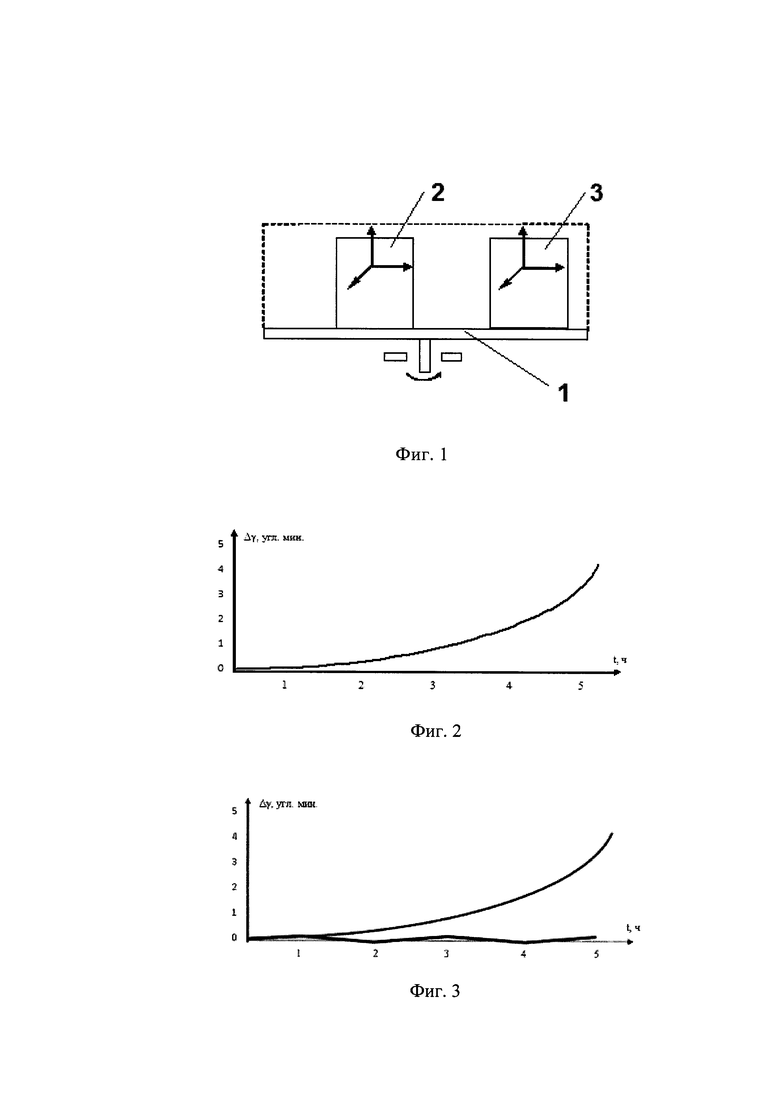
На чертеже представлены:
на фиг. 1 - платформа 1, выполненная с возможностью периодического поворота на угол 180°, на которой размещен датчик в виде трехосного гироскопа 2 и трехосного акселерометра 3;
на фиг. 2 - зависимость изменений во времени ошибки определения углового положения в известном способе;
на фиг. 3 - зависимость изменений во времени ошибки определения углового положения в предложенном способе (нижняя кривая).
Предложенный способ контроля состояния конструкции инженерно-строительного сооружения реализуется следующим образом.
Известно, что всем датчикам, как гироскопам, так и акселерометрам, присущи дрейф выходного сигнала во времени и при изменении температуры окружающей среды [Ю.Ю. Колбас, А.В. Томилин, М.В. Ладонкина. Экспериментальные исследования погрешностей Q-flex и Si- flex акселерометров при механической вибрации. Вестник МГТУ им. Баумана, сер. Приборостроение, №3, 2017, с. 12-18; С.Ф. Коновалов, А.В. Полынков, Дж. Б. Сео и др. Опыт разработки малошумящего акселерометра. Гироскопия и навигация, №3, (30), 2000; Ф. Ароновиц. Лазерный гироскоп. В Н. Применение лазеров. Под ред. В.П. Тычинского. М., Мир, 1974; Ю.Д. Голяев, Ю.Ю. Колбас, Г.И. Телегин. Нестабильность и нелинейность выходных характеристик волоконно-кольцевых интерферометров. Квантовая электроника, 17, №1, 1990; Ю.В. Филатов. Оптические гироскопы. С.-П., ГНЦ РФ ЦНИИ «Электроприбор», 2005].
В результате ошибки измерений датчиками угловой скорости и линейных ускорений растут от времени по линейному закону, а ошибки определения углового положения Δγ - по квадратичному (фиг. 2)
Для уменьшения этой ошибки предлагается выполнить каждый датчик в виде трехосного гироскопа и трехосного акселерометра, расположенных на горизонтальной платформе, которая периодически поворачивается на угол 180° (фиг. 1)
В первоначальном положении показания гироскопов и акселерометров S0 равны:
S0=Sполезн.+ΔS,
где Sполезн. - проекция полезного сигнала- угловой скорости вращения Земли для гироскопов или ускорения свободного падения для акселерометров на соответствующую измерительную ось датчика, ΔS - дрейф показаний гироскопа или акселерометра.
При повороте на угол 180° показания горизонтально расположенных гироскопов и акселерометров S180 равны:
S180=-Sполезн.+ΔS
Отсюда для каждого из горизонтально расположенных гироскопов и акселерометров можно определить их дрейф
ΔS=(S0+S180)/2
Дрейф вертикально расположенного гироскопа может быть найден из уравнения:
ΔSы=(S0+S180)/2-Sвист,
где Sвист - истинное значение проекции угловой скорости вращения Земли на вертикальный гироскоп, находимое из уравнения:
S2вист=(15,04°/ч)2-S2полезн.1-S2полезн.2
Здесь Sполезн.1 и Sполезн.2 - проекции угловой скорости вращения Земли на горизонтально расположенные гироскопы.
Дрейф вертикально расположенного акселерометра находят из уравнения:
ΔSв=(S0+S180)/2-Sвист,
где Sвист - истинное значение проекции ускорения свободного падения на вертикальный акселерометр, находимое из уравнения:
S2вист=g2-S2полезн.1-S2полезн.2
Здесь Sполезн.1 и Sполезн.2 - проекции ускорения свободного падения на горизонтально расположенные акселерометры, g - ускорение свободного падения в местности расположения здания или сооружения (берется из справочника).
Таким образом, ошибка определения углового положения будет периодически обнуляться с каждым поворотом платформы 1 (фиг. 1). Циклограмма вращения платформы выбирается исходя из периода собственных колебаний контролируемого здания или сооружения. Период полного поворота должен быть в 10 раз больше периода колебаний здания или сооружения. В результате ошибка определения положения датчиков может быть уменьшена в десять и более раз (фиг. 3).
Таким образом, благодаря введению дополнительных операций, в частности, операции, согласно которой каждый из датчиков, которые размещают в местах диагностирования контролируемой конструкции, выполняют в виде трехосного гироскопа и трехосного акселерометра, расположенных на горизонтальной платформе, которую периодически поворачивают на угол 180°, достигается требуемый технический результат, заключающийся в повышении точности контроля, поскольку обеспечивается повышение точности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля состояния конструкции инженерно-строительного сооружения | 2016 |
|
RU2619822C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПРОЛЕТНОГО СТРОЕНИЯ МОСТА | 2021 |
|
RU2786609C2 |
| СПОСОБ КОНТРОЛЯ ЛИНЕЙНЫХ И УГЛОВЫХ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛЬНОГО НАПРАВЛЕНИЯ ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА АНТЕННО-МАЧТОВЫХ СООРУЖЕНИЙ | 2011 |
|
RU2477454C1 |
| СПОСОБ ИЗМЕРЕНИЙ И ДОЛГОВРЕМЕННОГО КОНТРОЛЯ КОНСТРУКЦИИ СТАРТОВОГО СООРУЖЕНИЯ РАКЕТ-НОСИТЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2591734C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327105C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576548C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678109C2 |
| Способ контроля состояния здания и конструкций и устройство для его осуществления | 2019 |
|
RU2728246C1 |
| Устройство обследования состояния конструкций | 2020 |
|
RU2748789C1 |
| СИСТЕМА ИЗМЕРЕНИЙ И ДОЛГОВРЕМЕННОГО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ | 2015 |
|
RU2582233C1 |
Изобретение относится к измерительной технике и может быть использовано для автоматизированного контроля состояния конструкции здания или инженерно-строительного сооружения. Способ контроля состояния конструкции инженерно-строительного сооружения, согласно которому в местах диагностирования контролируемой конструкции размещают датчики, осуществляют опрос датчиков, преобразуют полученную от датчиков информацию и передают ее на пункт контроля, выполненный в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами. Причем датчики выполняют с возможностью получения от них информации об их пространственном положении, в пункте контроля формируют условное изображение контролируемой конструкции и фиксируют изменения пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей, а по результатам сравнения этих отклонений с заранее введенными в память компьютера фиксированными величинами, соответствующими их допустимым значениям, судят о состоянии контролируемой конструкции. При этом каждый из датчиков, которые размещают в местах диагностирования контролируемой конструкции, выполняют в виде трехосного гироскопа и трехосного акселерометра, расположенных на горизонтальной платформе, которую периодически поворачивают на угол 180°. Технический результат – повышение точности контроля. 3 ил.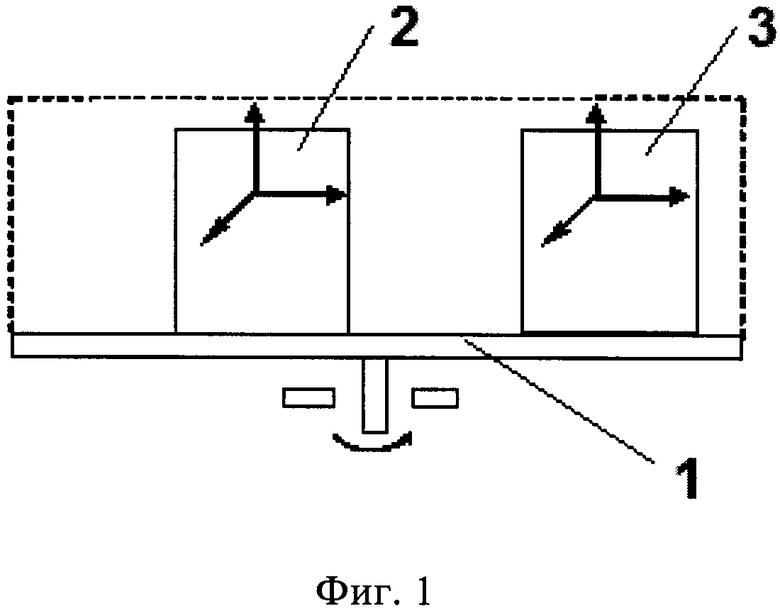
Способ контроля состояния конструкции инженерно-строительного сооружения, согласно которому в местах диагностирования контролируемой конструкции размещают датчики, осуществляют опрос датчиков, преобразуют полученную от датчиков информацию и передают ее на пункт контроля, выполненный в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, причем, датчики выполняют с возможностью получения от них информации о их пространственном положении, в пункте контроля формируют условное изображение контролируемой конструкции и фиксируют изменения пространственного положения датчиков, по которым определяют и регистрируют отклонения пространственного положения контролируемой конструкции или ее частей, а по результатам сравнения этих отклонений с заранее введенными в память компьютера фиксированными величинами, соответствующими их допустимым значениям, судят о состоянии контролируемой конструкции, отличающийся тем, что каждый из датчиков, которые размещают в местах диагностирования контролируемой конструкции, выполняют в виде трехосного гироскопа и трехосного акселерометра, расположенных на горизонтальной платформе, которую периодически поворачивают на угол 180°.
| Способ контроля состояния конструкции инженерно-строительного сооружения | 2016 |
|
RU2619822C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327105C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576548C2 |
| СПОСОБ ИЗМЕРЕНИЙ И ДОЛГОВРЕМЕННОГО КОНТРОЛЯ КОНСТРУКЦИИ СТАРТОВОГО СООРУЖЕНИЯ РАКЕТ-НОСИТЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2591734C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ СОСТОЯНИЕМ ИСКУССТВЕННЫХ СООРУЖЕНИЙ | 2010 |
|
RU2434300C1 |

