Предлагаемые способ и система относятся к контрольно-измерительной технике, а именно к автоматическим средствам непрерывного мониторинга состояния конструкции стартового сооружения ракет-носителей в процессе его эксплуатации, позволяющим своевременно выявить превышение допустимых деформаций конструкции, предупредить ее разрушение и оперативно оповестить обслуживающий персонал о возможности возникновения чрезвычайной ситуации.
Известны способы и устройства измерения и контроля состояния конструкции зданий и инженерно-строительных сооружений (авт. свид. СССР №№720215, 860281, 1062512, 1.159.153, 1200123, 1261629, 1415048, 1498289, 1649314, 1682264, 1781504; патенты РФ №№2008534, 2036446, 2082121, 2130593, 2180430, 2247958, 2327105, 2357205, 2410655, 2413055, 2473873; патенты США №№2866059, 3170152, 3226479, 3827514, 4107985; патент ФРГ №2900614; патенты ЕР №№0401133, 0927869; Ренский А.Б. Руководство по тензометрированию строительных конструкций и материалов. М. 1971, с. 133, с. 149-155 и другие).
Из известных способов и устройств наиболее близкими к предлагаемым являются «Способ контроля состояния конструкции здания или инженерно-строительного сооружения и устройство для его осуществления» (патент РФ №2327105, G01B 7/16, 2006), которые и выбраны в качестве прототипов.
Известный способ заключается в опросе датчиков, установленных в местах диагностирования конструкции, преобразовании полученной с датчиков информации и ее передаче на пункт контроля в виде компьютера. Результаты опроса датчиков отражают в виде наглядной картины текущего состояния конструкции на экране компьютера.
Известное устройство содержит пункт контроля в виде компьютера, датчики, размещенные в местах диагностирования конструкции, связанный с ними блок предварительной обработки сигналов и средства связи блока предварительной обработки сигналов с упомянутым компьютером. При этом блок предварительной обработки сигналов выполнен с возможностью опроса датчиков, приема и регистрации сигналов, содержащих измерительную информацию, и с возможностью сравнения упомянутой информации с заранее внесенными в его память фиксированными величинами.
Однако известные технические решения обеспечивают только тензометрический контроль одного из самых сложных и ответственных объектов космической инфраструктуры - стартового сооружения ракет-носителей, что недостаточно.
Это обусловлено тем, что в районе расположения стартового сооружения, например ракеты-носителя «Ангара» (г. Плесецк), достаточно сложная геологическая обстановка, вызванная наличием большого количества карстовых пород, которые в ходе эксплуатации могут стать источниками нестабильности пространственного положения стартового сооружения с размещенными на нем агрегатами технологического оборудования.
Оказывают определенное влияние на эксплуатацию стартового сооружения изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения при пуске ракеты-носителей, особенно тяжелого класса «Ангара».
Кроме того, важное значение имеет объективный контроль изменения состояния стартового сооружения в течение всего времени его эксплуатации - функции «черного ящика». Особое значение имеет период времени, соответствующий циклу запуска ракеты-носителя.
Все вышеуказанные причины оказывают существенное влияние на точность измерений и достоверность долговременного контроля конструкции стартового сооружения ракет-носителей.
Технической задачей изобретения является повышение точности измерений и достоверности долговременного контроля конструкции стартового сооружения ракет-носителей путем геодезического контроля, контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения и обеспечения функции «черного ящика».
Поставленная задача решается тем, что способ измерения и долговременного контроля конструкции стартового сооружения ракет-носителей, включающий, в соответствии с ближайшим аналогом, опрос датчиков, установленных в местах диагностирования конструкции, преобразование полученной с датчиков информации и ее передачу на пункт контроля, выполненный в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, при этом формируют условное изображение контролируемого объекта, повторяющее его конструкцию, размещают на нем в местах, соответствующих реальному расположению датчиков, цветные метки-индикаторы, выводят упомянутое изображение с метками-индикаторами на экран компьютера, обеспечивая постоянную связь упомянутых меток-индикаторов с датчиками, в качестве фиксированной величины для каждого датчика используют полученное путем предварительных расчетов предельное допустимое значение измеряемого параметра, а результаты опроса датчиков и результаты сравнения последней принятой с них информации отражают в реальном времени через цвет меток-индикаторов и его смену на условном изображении объекта, по которому судят об исправности датчика и состоянии конструкции, отличается от ближайшего аналога тем, что создают планово-высотную основу стартового сооружения, состоящую из «кустов» вековых глубинных реперов, систему деформационных марок, размещаемую в контрольных точках несущих конструкций сооружения, проводят периодический мониторинг пространственного положения двенадцати опор пускового стола с точностью не хуже 1 мм, выполняют измерения относительного положения элементов пускового стола и элементов кабель-заправочной башни с точностью не хуже 2 мм, в случае нештатных ситуаций в период пуска ракеты-носителя регистрируют аномальные процессы динамического состояния защитного покрытия с целью последующего исследования причин их возникновения, фиксируют и сохраняют измерительную информацию в течение всего времени эксплуатации стартового сооружения, выполняя функцию «черного ящика».
Поставленная задача решается тем, что система измерений и долговременного контроля конструкции стартового сооружения ракет-носителей, содержащая, в соответствии с ближайшим аналогом, пункт контроля, характеризующийся использованием компьютера, измерительные преобразователи, размещенные в местах диагностирования конструкции, связанный с ними блок предварительной обработки сигналов, включающий плату аналого-цифрового преобразователя, средства связи блока предварительной обработки сигналов с упомянутым компьютером, выполненным с возможностью опроса измерительных преобразователей, приема и регистрации сигналов, содержащих измерительную информацию, и с возможностью сравнения упомянутой информации с заранее внесенными в его память фиксированными величинами, средства наглядного представления информации, включающие выведенное на экран компьютера условное изображение контролируемой конструкции и цветные метки-индикаторы, размещенные на упомянутом изображении в соответствии с размещением измерительных преобразователей и выполненные с возможностью отражения в реальном времени посредством своего цвета и его изменения исправности соответствующего измерительного преобразователя и результатов сравнения последней принятой с него информации, компьютер выполнен с возможностью одновременного со сменой цвета метки-индикатора вывода на экран дополнительных сведений о типе и исполнении элемента конструкции, на котором размещен соответствующий упомянутой метке-индикатору измерительный преобразователь, отличающийся от ближайшего аналога тем, что она снабжена пусковым столом, кабельно-заправочной башней, плитой покрытия стартового сооружения, планово-высотной геодезической основой стартового сооружения, системой деформационных марок и комплектом контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения.
В качестве высотной геодезической основы стартового сооружения принята сеть реперов глубинных в виде «кустов», состоящих из трех реперов глубинных и одного пункта референтного. «Куст», состоящий из трех реперов с одним пунктом референтным заложен в форме двух треугольников с углами около 45°. Глубинные реперы в пределах каждого отдельного «куста» заложены на расстоянии около 30 метров до соответствующего референтного пункта. Референтные пункты расположены на расстоянии примерно 60-80 метров от стартового сооружения.
В качестве системы деформационных марок приняты деформационные марки, размещаемые в контрольных точках несущих конструкций сооружения, а именно равномерно размещены на плите покрытия, вокруг пускового стола.
В качестве комплекта контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения приняты датчики давления и температуры, размещенные на защитном покрытии стартового сооружения на одной видимой прямой линии.
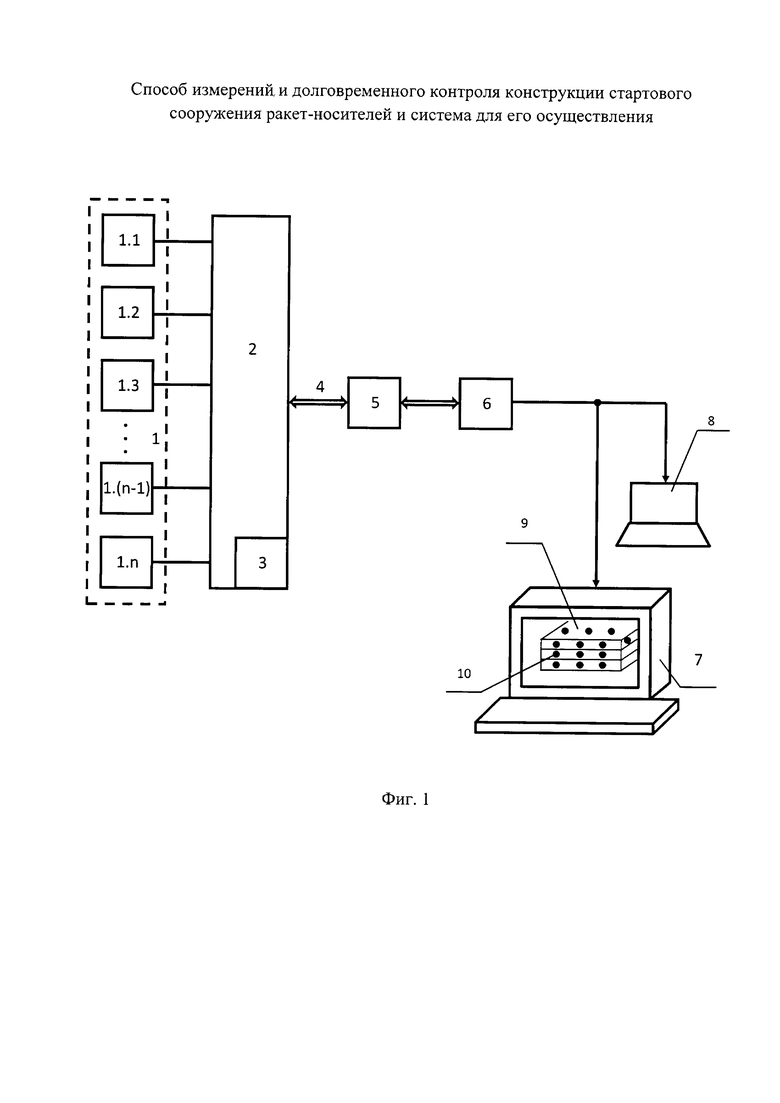
Структурная схема системы, реализующей предлагаемый способ, представлена на фиг. 1. Схема планово-высотной геодезической основы стартового сооружения изображена на фиг. 2. Схема пространственного положения оси между центрами пускового стола и ракеты космического назначения показана на фиг. 3. Комплект контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения представлен на фиг. 4.
Система измерений и долговременного контроля конструкции стартового сооружения ракет-носителей содержит набор измерительных преобразователей 1, блок 2 предварительной обработки сигналов, включающий плату 3 аналого-цифрового преобразователя (АЦП), линию связи - шину 4, устройство согласования сигналов - конвертор 5, пункт контроля, выполненный в виде компьютера 6, и связанные с последним дисплей 7 и устройство 8 звуковой сигнализации. На экран дисплея 7 выведено условное изображение 9 контролируемой конструкции с размещенными на ней цветными метками-индикаторами 10.
Набор измерительных преобразователей 1 в приведенном примере реализации включает тензометрические датчики 1.1, 1.2, …, 1.n.
Блок 2 предварительной обработки сигналов выполняет функции коммутации, подключения датчиков по запросу компьютера, снятие с них информации, необходимые преобразования, в том числе оцифровку информации и ее передачу. Блок 2 может быть реализован на базе микросхемы управляющего контроллера, включающего плату АЦП и согласующего работу всех элементов блока.
К компьютеру 6, который предназначен для управления процессом контроля в соответствии с заложенной программой, а также для регистрации и обработки данных, не предъявляются серьезные технические или системные требования. Это может быть персональный компьютер с тактовой частотой не менее 500 МГц и объемом оперативной памяти не менее 256 Мб. Программа может работать на операционных системах от Windows 98 до Windows ХР.
В качестве планово-высотной геодезической основы стартового сооружения принята сеть глубинных реперов в виде трех «кустов» и одного включает три глубинных репера 13.1, 13.2 и 13.3 (15.1, 15.2 и 15.3, 16.1, 16.2 и 16.3) и один референтный пункт 13 (15, 16), которые расположены в форме двух треугольников с углами около 45° и общей вершиной, в которой помещен референтный пункт 13 (15, 16) на расстоянии около 30 метров от двух ближайших глубинных реперов 13.1 и 13.3 (15.1 и 15.3, 16.1 и 16.3). Стартовое сооружение состоит из пускового стола 11 и опор кабель-заправочной башни 12.1 и 12.2. Система деформационных марок включает деформационные марки (18.1, 18.2, 18,3, 18.4, 18.5, 18.6, 18.7, 18.8, 18.9, 18.10, 18.11, 18.12, 18.13 и 18.14), размещенные в контрольных точках несущих конструкций сооружения, а именно равномерно размещенные на плите покрытия, вокруг пускового стола. В качестве комплекта контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения используются датчики давления и температуры (19.1, 19.2, 19.3 и 19.4), размещенные на защитном покрытии стартового сооружения на одной видимой прямой линии.
Предлагаемый способ контроля осуществляется посредством заявляемой системы следующим образом.
Для тензометрического контроля стартового сооружения ракет-носителей осуществляют установку тензометрических датчиков 1.1, 1.2, …, 1.n в наиболее опасных сечениях конструкции, подверженным наибольшим нагрузкам. По обоснованию выбора датчиков, мест их установки, технологий и конструкторских решений по монтажу и эксплуатации проводилось скрупулезное математическое моделирование и была построена сложная конечно-элементная модель (КЭМ) строительных конструкций стартового сооружения, на которой отрабатывались воздействия возможных нагрузок и рассматривались различные ситуационные сценарии. С использованием КЭМ, откалиброванной на реальном объекте, рассчитывались диапазоны работы тензометрических датчиков и производилась настройка оборудования системы.
На экран дисплея 7 выведено условное изображение 9 контролируемой конструкции с размещенными на ней цветными метками-индикаторами 10, соответствующими датчикам 1. Работа датчиков, измерения которых находятся в допустимых пределах, отражается зеленым цветом метки-индикатора 10. Нерабочее состояние датчика 1 отражается желтым цветом. Для отражения показаний датчиков, превышающих предельно допустимые значения, предусмотрен красный цвет индикатора.
В память компьютера 6 заносят расчетные величины предельно допустимой деформации для каждого контролируемого элемента конструкции стартового сооружения, на который устанавливается датчик, а также сведения о типе конструкции, месте его расположения и другая необходимая при принятии решения информация.
За стартовым сооружением устанавливают постоянный надзор на протяжении всего периода эксплуатации. Система находится в постоянном режиме самодиагностики.
Компьютер 6 в соответствии с заданной программой производит поочередный опрос датчиков 1, для чего на шину 4 выставляется адрес опрашиваемого датчика 1, блок 2 принимает сигнал, расшифровывает и подключает датчик с запрашиваемым адресом для считывания с него информации. Полученная с датчика 1 информация преобразуется в цифровую форму на плате 4 АЦП и передается на шину 4. Конвертер 5 осуществляет преобразование сигналов к виду, пригодному для обработки в компьютере. Компьютер 6 регистрирует сигнал, несущий измерительную информацию, и осуществляет сравнение полученных данных с заранее введенной в память предельной величиной. Сравнение может осуществляться, например, путем нахождения разности между упомянутыми величинами.
При превышении полученной с датчика 1 информации предельно допустимого значения, т.е. когда происходит смена знака полученной разницы, компьютер 6 выдает сигнал на смену цвета соответствующей метки-индикатора 10 и на звуковое устройство 8, осуществляющее подачу звукового сигнала. Одновременно с этим производится обращение к памяти компьютера и извлечение из нее всей имеющейся информации о том элементе строительной конструкции, на котором произошло превышение. Извлеченная информация выводится на экран дисплея 7.
Дежурный, в рабочей зоне которого расположен дисплей 7, фиксирует сигнал «тревоги». Эксплуатация стартового сооружения приостанавливается, производится эвакуация людей, и специалисты производят обследование конструкции, с которой поступил тревожный сигнал. После анализа принимается решение о дальнейшей эксплуатации стартового сооружения.
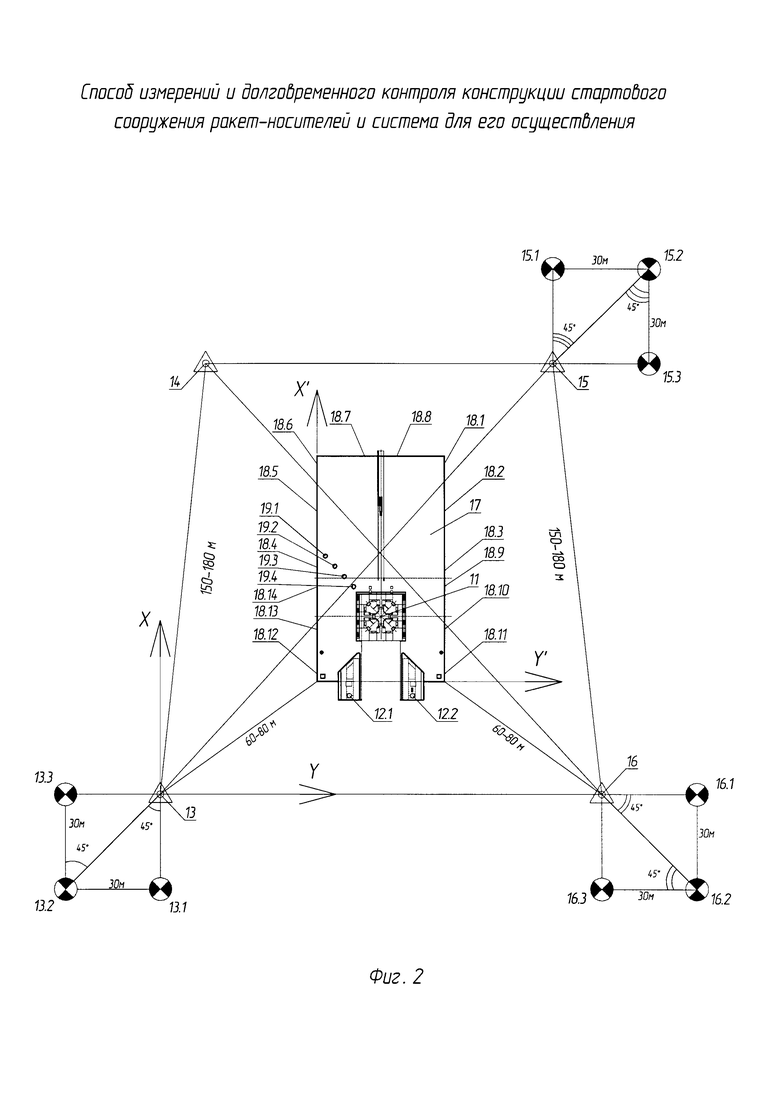
Для решения задачи по высокоточному мониторингу пространственного положения стартового сооружения, в том числе и по его геотехническому мониторингу, был создан комплект геодезического контроля. Он включает в себя планово-высотную основу стартового сооружения, состоящую из «кустов» вековых глубинных реперов, а также систему деформационных марок, размещаемых в контрольных точках несущих конструкций сооружения (фиг. 2).
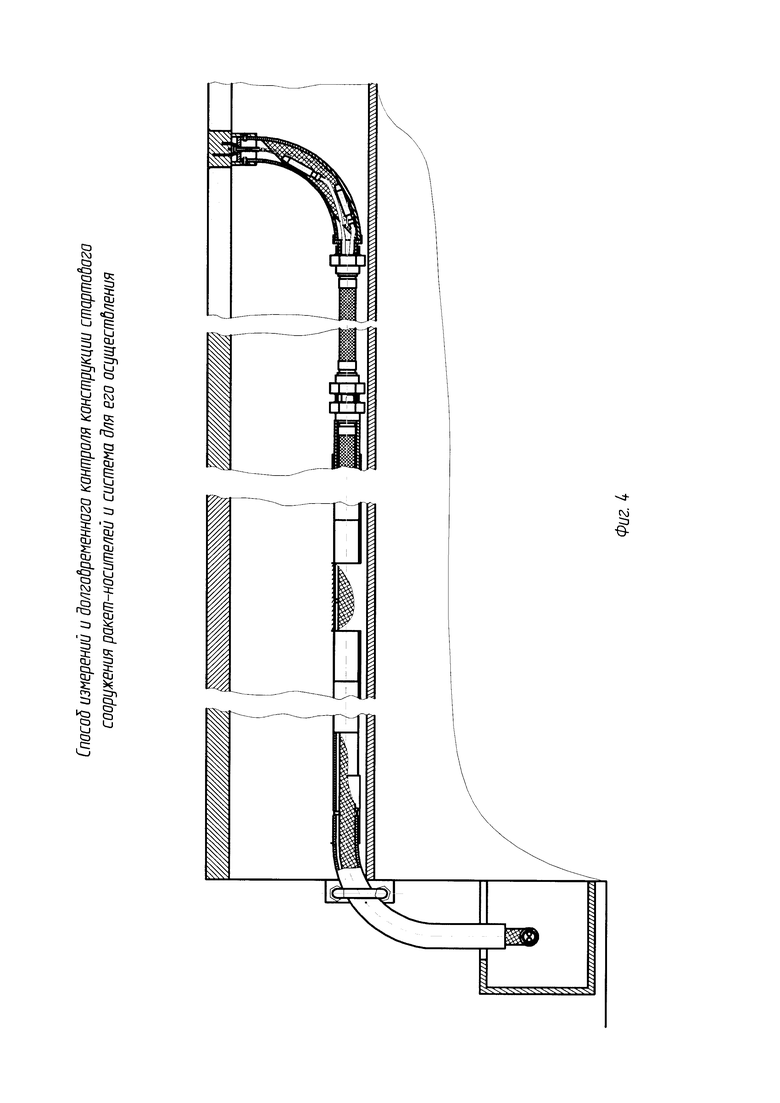
Для решения задачи контроля поверхности защитного покрытия стартового сооружения был создан комплект контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения (фиг. 4).
В качестве планово-высотной геодезической основы стартового сооружения принята сеть глубинных реперов в виде трех «кустов» и одного референтного пункта 14, расположенных равномерно вокруг стартового сооружения 17 на расстоянии 60-80 метров от него. При этом каждый «куст» включает три глубинных репера 13.1, 13.2 и 13.3 (15.1, 15.2 и 15.3, 16.1, 16.2 и 16.3) и один референтный пункт 13 (15, 16), которые расположены в форме двух треугольников с углами около 45° и общей вершиной, в которой помещен референтный пункт 13 (15, 16) на расстоянии около 30 метров от двух ближайших глубинных реперов 13.1 и 13.3 (15.1 и 15.3, 16.1 и 16.3). Стартовое сооружение состоит из пускового стола 11 и опор кабель-заправочной башни 12.1 и 12.2.
Система деформационных марок, размещаемых в контрольных точках несущих конструкций сооружения, а именно плите покрытия пускового стола, состоит из деформационных марок (18.1, 18.2, 18.3, 18.4, 18.5, 18.6, 18.7, 18.8, 18.9, 18.10, 18.11, 18.12, 18.13 и 18.14).
Комплект контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения включает датчики давления и температуры (19.1, 19.2, 19.3 и 19.4), размещенные в защитном покрытии стартового сооружения на одной видимой прямой линии.
Разработанная система выполняет особую задачу объективного контроля изменения состояния стартового сооружения - функцию «черного ящика». При этом фиксируется и сохраняется измерительная информация в течение всего времени эксплуатации стартового сооружения. Особое значение имеет период времени, соответствующий циклу запуска ракеты-носителя. Для этого периода разработан особый режим работы системы измерений и долговременного контроля конструкции стартового сооружения.
Перед моментом запуска ракеты-носителя (за 5 минут) система переводится в специальный режим, обеспечивающий максимально возможную плотность записи измерительной информации. Следовательно, система переводится из режима записи медленно меняющихся параметров в режим быстро меняющихся параметров состояния стартового сооружения.
Отметим, что регистрация и сохранение информации обеспечивается не только конечными средствами ее сбора и хранения (персональный компьютер 6), но и периферийными средствами (промежуточные модули сбора и передачи измерительной информации). В периферийных технических средствах измерительная информация записывается на внутреннюю флэш-память.
В случае возникновения чрезвычайных ситуаций (в том числе аварии ракет-носителей) - по результатам «расшифровки» накопленных данных, динамики и характера их изменения будут проводиться работы по установления момента начала и развития нештатной ситуации, а также анализироваться возможные причины ее возникновения.
Массивы информации «черного ящика» стартового сооружения - это наборы данных комплекта тензометрического контроля и комплекта контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения, записанные цифровой подсистемой регистрации системы измерений и долговременного контроля конструкции стартового сооружения в короткий период времени - период схода ракеты носителя с пускового стола.
С использованием планово-высотной геодезической основы стартового сооружения, а также высокоточного цифрового оборудования и оборудования комплекта геодезического контроля в ходе эксплуатации стартового комплекса решаются две задачи пространственных измерений:
1) проводится периодический мониторинг пространственного положения двенадцати опор пускового стола с точностью не хуже 1 мм;
2) выполняются измерения относительного положения элементов пускового стола и элементов кабель-заправочной башни с точностью не хуже 2 мм.
Смысл первой измерительной задачи состоит в измерении величины отклонения каждой из двенадцати контрольных точек (опор) пускового стола от горизонта плоскости, образованной двумя точками (опорами), а также динамики их перемещений относительно высотной геодезической основы до и после пуска ракеты-носителя. Отклонение каждой из двенадцати контрольных точек (опор) пускового стола от горизонта плоскости не должно превышать 1 мм.
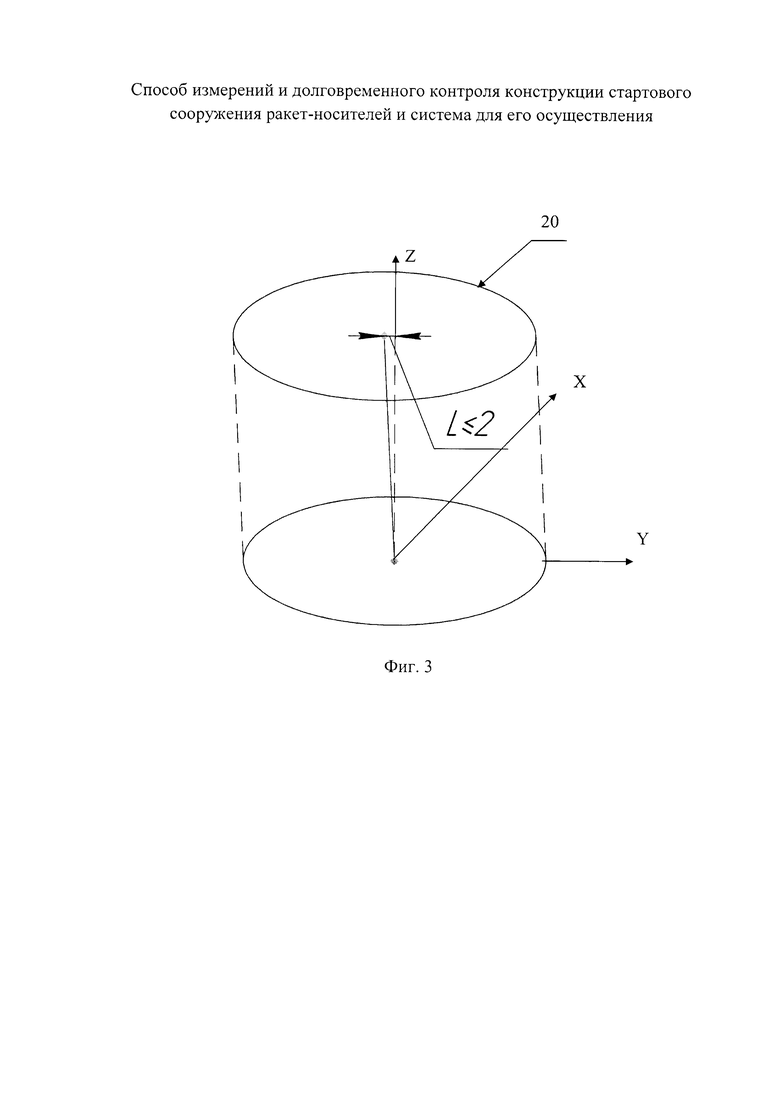
Смысл второй измерительной задачи состоит в измерении пространственного положения оси, проходящей через центр пускового стола и центр мнимой окружности, образованной опорами устройства удержания ракеты кабель-заправочной башней.
Сущность этих измерений состоит в построении мнимой окружности и ее центра, проходящего через нанесенные риски на пусковом столе (фиг. 3) и центром мнимой окружности 20, образованной опорами устройства удержания ракеты кабель-заправочной башней стартового сооружения (фиг. 3).
Таким образом, предлагаемые способ и система по сравнению с прототипами и другими техническими решениями аналогичного назначения обеспечивают повышение точности измерений и достоверности долговременного контроля конструкции стартового сооружения ракетносителей, в том числе и семейства ракеты-носителя «Ангара».
Это достигается за счет геодезического контроля, контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения и обеспечения функции «черного ящика».
Разработка автоматизированной системы измерений и долговременного контроля конструкции стартового сооружения ракет-носителей была обусловлена не только требованиями ГОСТ Р 22.1.12-2005, ГОСТ 31937-2011, но и главным образом:
- уникальностью стартового сооружения и его пускового стола;
- необычно размещенной над газоходом кабель-заправочной башней высотой 57 метров с весом 1740 тонн;
- самой ракетой-носителем «Ангара» и особенностью траектории ее движения над стартовым сооружением на начальном этапе пуска.
Разработанная система обладает и некоторыми признаками уникальности.
Первый из них заключается в достигнутом способе высокоточного измерения как пространственного положения заглубленного сооружения, так и деформаций его основных критических элементов.
Другой из отличительных признаков, состоит в реализованном способе объединения разнородных информационных потоков, поступающих в автоматизированную систему:
- перемещений контрольных точек несущих конструкций;
- деформаций и углов наклона критичных элементов несущих конструкций;
- давления газового потока стартующей и температуры в различных зонах поверхности защитного покрытия (металлооблицовки) нулевой отметки стартового сооружения;
параметров окружающей среды: температуры, скорости и направления ветра.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| СИСТЕМА ИЗМЕРЕНИЙ И ДОЛГОВРЕМЕННОГО КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ | 2015 |
|
RU2582233C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК СООРУЖЕНИЙ | 2010 |
|
RU2426089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИОННЫХ ХАРАКТЕРИСТИК ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ | 2013 |
|
RU2546990C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2015 |
|
RU2571497C1 |
| СПОСОБ ОЦЕНКИ ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ ЗАЩИТНОЙ ГЕРМЕТИЧНОЙ ОБОЛОЧКИ РЕАКТОРНОГО ОТДЕЛЕНИЯ АЭС | 2014 |
|
RU2577555C9 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ГЕОДЕЗИЧЕСКОГО ЦЕНТРА | 2024 |
|
RU2833419C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2012 |
|
RU2527902C2 |
| Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта | 2017 |
|
RU2668730C1 |
| Способ автоматизированных измерений и дистанционной передачи данных для геотехнического мониторинга объектов добычи газа | 2024 |
|
RU2836421C1 |
Заявленные изобретения относятся к контрольно-измерительной технике, а именно к автоматическим средствам непрерывного мониторинга состояния конструкции стартового сооружения в процессе его эксплуатации. Система, реализующая предлагаемый способ, содержащий набор измерительных преобразователей, блок предварительной обработки сигналов, включающий плату аналого-цифрового преобразователя, линию связи - шину, устройство согласования сигналов - конвертер, пункт контроля, выполненный в виде компьютера, и связанные с последним дисплей, устройство звуковой сигнализации, условное изображение контролируемой конструкции с размещенными на ней цветными метками-индикаторами, планово-высотную геодезическую основу стартового сооружения и комплект контроля изменения полей давления температуры на поверхности защитного покрытия стартового сооружения. В качестве планово-высотной геодезической основы стартового сооружения принята сеть глубинных реперов в виде трех «кустов» и одного референтного пункта 14, расположенных равномерно вокруг стартового сооружения на расстоянии 60-80 метров от него, а также систему деформационных марок. Каждый «куст» включает три глубинных репера. В качестве комплекта контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения приняты датчики давления и температуры, размещенные на защитном покрытии стартового сооружения на одной видимой прямой линии. Технический результат заключается в повышении точности измерений и достоверности долговременного контроля конструкции стартового сооружения. 2 н.п. ф-лы, 4 ил. 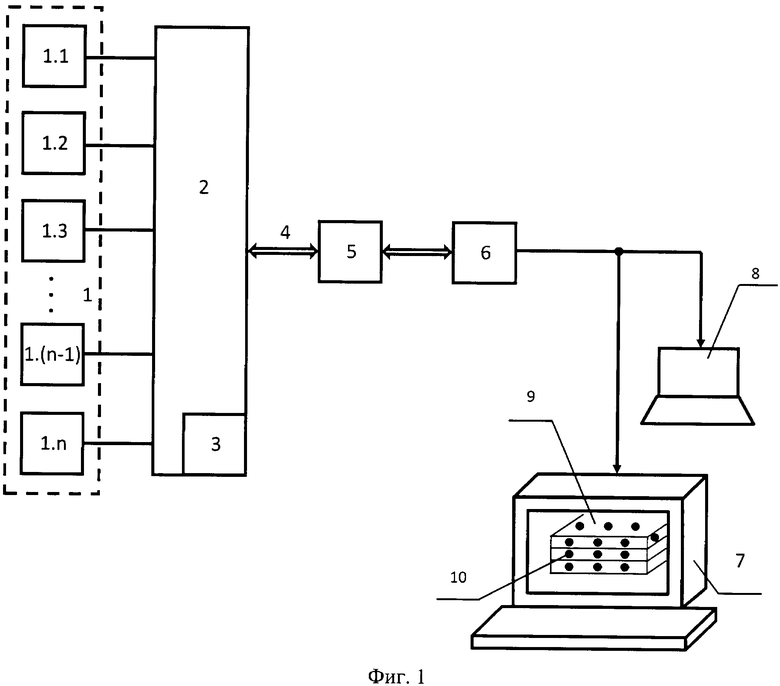
1. Способ измерений и долговременного контроля состояния конструкции стартового сооружения ракет-носителей, включающий опрос датчиков, установленных в местах диагностирования конструкции, преобразование полученной с датчиков информации и ее передачу на пункт контроля, выполненный в виде компьютера с программным обеспечением, где осуществляют регистрацию и сравнение полученной информации с заранее введенными в память компьютера фиксированными величинами, при этом формируют условное изображение контролируемого объекта, повторяющее его конструкцию, размещают на нем в местах, соответствующих реальному расположению датчиков, цветные метки-индикаторы, выводят упомянутое изображение с метками-индикаторами на экран компьютера, обеспечивая постоянную связь упомянутых меток-индикаторов с датчиками, в качестве фиксированной величины для каждого датчика используют полученное путем предварительных расчетов предельное допустимое значение измеряемого параметра, а результаты опроса датчиков и результаты сравнения последней принятой с них информации отражают в реальном времени через цвет меток-индикаторов и его смену на условном изображении объекта, по которому судят об исправности датчика и состоянии конструкции, отличающийся тем, что создают планово-высотную основу стартового сооружения, состоящую из «кустов» вековых глубинных реперов, систему деформационных марок, размещаемых в контрольных точках несущих конструкций сооружения, проводят периодический мониторинг пространственного положения двенадцати опор пускового стола с точностью не хуже 1 мм, выполняют измерения относительного положения элементов пускового стола и элементов кабель-заправочной башни с точностью не хуже 2 мм, в случае нештатных ситуаций в период пуска ракеты-носителя регистрируют аномальные процессы динамического состояния защитного покрытия с целью последующего исследования причин их возникновения, фиксируют и сохраняют измерительную информацию в течение всего времени эксплуатации стартового сооружения, выполняя функцию «черного ящика».
2. Система измерений и долговременного контроля конструкции стартового сооружения ракет-носителей, содержащая пункт контроля, характеризующийся использованием компьютера, измерительные преобразователи, размещенные в местах диагностирования конструкции, связанный с ними блок предварительной обработки сигналов, включающий плату аналого-цифрового преобразователя, средства связи блока предварительной обработки сигналов с упомянутым компьютером, выполненным с возможностью опроса измерительных преобразователей, приема и регистрации сигналов, содержащих измерительную информацию, и с возможностью сравнения упомянутой информации с заранее внесенными в его память фиксированными величинами, средства наглядного представления информации, включающие выведенное на экран компьютера условное изображение контролируемой конструкции и цветные метки-индикаторы, размещенные на упомянутом изображении в соответствии с размещением измерительных преобразователей и выполненные с возможностью отражения в реальном времени посредством своего цвета и его изменения исправности соответствующего измерительного преобразователя и результатов сравнения последней принятой с него информации, компьютер выполнен с возможностью одновременного со сменой цвета метки-индикатора вывода на экран дополнительных сведений о типе и исполнении элемента конструкции, на котором размещен соответствующий упомянутой метке-индикатору измерительный преобразователь, отличающаяся тем, что она снабжена планово-высотной геодезической основой стартового сооружения стартового комплекса и комплектом контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения стартового комплекса, причем в качестве планово-высотной геодезической основы стартового сооружения принята сеть глубинных реперов в виде трех «кустов» и одного референтного пункта, расположенных равномерно вокруг стартового сооружения на расстоянии 60-80 метров от него, при этом каждый «куст» включает три глубинных репера и один референтный пункт, которые расположены в форме двух треугольников с углами около 45° и общей вершиной, в которой помещен референтный пункт на расстоянии около 30 метров от двух ближайших глубинных реперов, и система деформационных марок, размещаемых в контрольных точках несущих конструкций стартового сооружения, а, именно, равномерно размещаемые на плите покрытия, вокруг пускового стола, при этом комплект контроля изменения полей давления и температуры на поверхности защитного покрытия стартового сооружения стартового комплекса включает датчики давления и температуры, размещаемые на защитном покрытии стартового сооружения на одной видимой прямой линии.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ КОНСТРУКЦИИ ЗДАНИЯ ИЛИ ИНЖЕНЕРНО-СТРОИТЕЛЬНОГО СООРУЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327105C2 |
| СИСТЕМА МОНИТОРИНГА БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ ЗДАНИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2472129C1 |
| US 4452087 А 05.06.1984 | |||
| Руководство по тензометрированию строительных конструкций и материалов | |||
| - М., 1971, с.133, с.149-155. | |||

