Область техники, к которой относится изобретение
Магнито-разгруженная ступица относится к области транспорта, который перемещается по горизонтальной поверхности или других устройств, в которых вал вращается с постоянной радиальной нагрузкой, например ось ротора турбореактивного двигателя самолета.
Уровень техники
При движении транспорта значительная часть энергии расходуется на преодоления силы трения в опоре.
По виду трения опоры подразделяются: с трением скольжения, с трением качения, упругие, с газовой смазкой, гидростатические, ртутные, магнитные подвесы.
Энергоемкая задача перемещения тяжелых грузов стояла перед человеком с древних времен. Сначала груз просто тащили по поверхности. Далее изобрели волокуши, но их вытеснили сани. Применение катков, подкладываемых под сани, значительно снизило трение. Но для этого способа требуется ровная дорога с твердым покрытием и постоянная укладка катков перед санями. К качественному скачку следует отнести изобретение колеса. Далее под колесом подразумевается диск, который вращается на валу или который вращается вместе с валом. Затраты на трение опоры переносятся на границу между колесом и валом, закрепленным на шасси, или шасси и валом, закрепленным в колесе. Усиленный износ поверхностей этой границы и стремление уменьшить силу трения, привели к появлению ступицы транспорта. Обычно ступица транспорта крепится в центре диска и крутится вместе с диском на неподвижном валу. В альтернативном варианте колеса ступица крепится на шасси транспорта, а вал вместе с диском вращается в ступице. Здесь и далее под валом подразумевается ось цапфы транспорта или, например, ось ротора. Первоначально в ступице применялся подшипник скольжения, смазываемый, например дегтем. В современной ступице подшипник скольжения заменен на подшипник качения. Подшипник ступицы испытывает наибольшую нагрузку по сравнению с остальными подшипниками транспорта. Как правило, между валом и шасси устанавливается сложная система антивибрационной подвески, которая далее называется амортизатором.
Известна ступица транспорта, например автомобиля, мотоцикла, велосипеда или других транспортных средств, показанная на фиг. 1, которая состоит из неподвижного вала 1, закрепленного на амортизаторе 2, и барабана 3 с кронштейнами крепления 4, на которых крепятся диск колеса и диск тормоза или спицы обода колеса. Между неподвижным валом 1 и вращающимся барабаном 3 запрессованы два радиально-упорных подшипника 5. Сила P нагрузки, задаваемая весом транспорта, прижимает вал 1 вертикально вниз через подшипник 5 к вращающемуся барабану 3.
Известна альтернативная ступица транспорта, показанная на фиг. 2, в которой неподвижный барабан 3 закреплен кронштейнами 4 крепления на амортизаторе 2. Между вращающимся валом 1, например осью колесной пары 6 трамвая, и неподвижным барабаном 3 запрессованы подшипники 5. Сила нагрузки P, задаваемая весом транспорта, прижимает вертикально вниз барабан 3 через подшипник 5 к вращающемуся валу 1.
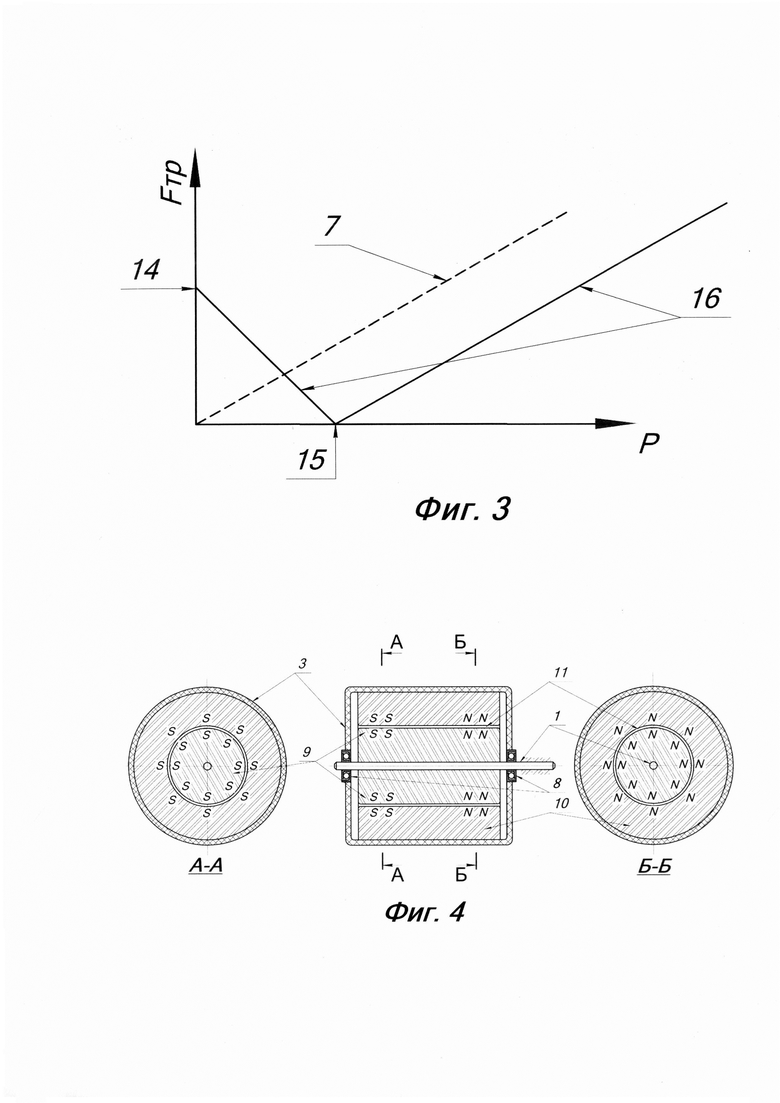
Зависимость силы трения Fтр в ступице фиг. 1 или фиг. 2 от нагрузки P показана на графике фиг. 3 прямой линией 7 и определяется формулой:
Fтр=k * P, где
k - коэффициент трения качения подшипника,
P – сила нагрузки (часть веса транспорта, нагрузившая ступицу).
По горизонтальной оси откладывается сила P нагрузки на ступицу, которая определяется, например весом транспорта. По вертикальной оси откладывается сила трения Fm, которая возникает в подшипнике ступицы.
При увеличении веса транспорта сила трения Fтр линейно возрастает. Угол наклона прямой линии 7 отражает величину коэффициента трения. Чем меньше k, тем ближе линия 7 прижата к оси P.
Известно взаимодействие постоянных магнитов через магнитные поля. Одноименные полюса отталкиваются, например северный N-полюс отталкивается от N-полюса, а разноименные полюса притягиваются, например южный S-полюс притягивается к N-полюсу.
Под постоянными магнитами далее подразумевается намагниченный материал с магнитожестким свойствами, например неодимовые постоянные магниты NdFeB из сплава неодима, железа и бора, который не только сильнее, чем у предыдущего поколения, но является более экономичным. Он состоит в основном из железа. Запасы неодима на Земле больше, чем свинца.
Известен магнитный подвес - устройство для разгрузки опоры, действующее за счет сил отталкивания одноименных полюсов постоянных магнитов или электромагнитов. Сущность магнитного подвеса в том, что сила тяжести тела уравновешиваются силами, создаваемыми магнитными полями. Подвешенное тело не имеет механического контакта с опорами и, следовательно, отсутствует механическое трение.
Известные магнитные подвески эволюционирует по путям, названия которых соответствуют названиям их производителей: подвеска от Delphi, SKF и BOSE. Но они устанавливаются между неподвижной частью ступицы и шасси автомобиля. В подвесках Delphi и SKF жесткость амортизаторов управляется магнитными полями. В подвеске BOSE имеется отдельный линейный двигатель, расположенный вне ступицы.
На практике не всегда необходим полный магнитный подвес, т.е. обладающий эффектом левитации по пяти степеням свободы. В ряде случаев необходимые характеристики достигаются при использовании магнитного подвеса для ограничения перемещения ротора лишь по отдельным степеням свободы. В настоящее время существует несколько типов магнитного подвеса: полный, частичный, активный и комбинированный. Выбор типа магнитного подвеса зависит от условий работы и технических требований
Известны транспортные средства, в которых, с целью магнитного подвешивания транспортного средства, используются магнитные поля, создаваемые транспортом и (или) магнитным дорожным полотном. Магнитные поля компенсируют вес транспорта, чем достигается эффект левитации, что уменьшает силу трения до нулевого уровня. Но они требуют создания дорогостоящего магнитного дорожного полотна, и часто используют криогенную технику. Существуют также сложности с удержанием транспорта вдоль магнитного полотна и его торможением. Уклонение транспорта от дорожного полотна приводит к катастрофе. Экономический выигрыш от снижения трения не превышает затраты на создание магнитного поля и поддержание функционирования магнитного дорожного полотна или криогенных температур.
Известны магнитные подшипники, работающих на принципе магнитной левитации, полезной особенностью которых является отсутствие сил трения между внутренней и внешней обоймой.
Магнитные подшипники подразделяются на пассивные и активные. Пассивные магнитные подшипники изготавливаются на базе постоянных магнитов. В активных магнитных подшипниках используются электромагниты, датчики смещения вала и сложная система управления катушками электромагнитов. В активном подвесе электромагнитное поле, создающее силу левитации ротора, генерируется обмотками электромагнитов, располагаемыми по внутренней окружности статора вокруг намагниченного вала ротора.
Один из вариантов пассивного магнитного подшипника с вращающейся внешней обоймой показан на фиг. 4. На неподвижном валу 1, между упорными подшипниками 8 закреплен цилиндрический магнит 9, который намагничен вдоль вала. Внутри барабана 3 закреплен цилиндрический полый магнит 10, который намагничен вдоль вала в том же направлении, что и цилиндрический магнит 9. Нелинейные силы магнитного отталкивания, возникающие между одноименными полюсами, не позволяют цилиндрическому полому магниту 10 соприкоснуться с цилиндрическим магнитом 9. Между магнитами существуют воздушный кольцевой зазор 11. Упорные подшипники 8 удерживают барабан 3 от аксиального смещения, но принципиально допускают ограниченное радиальное смещение барабана относительно вала.
К существенным недостаткам пассивного магнитного подшипника относится низкая нагрузочная способность и принципиальное радиальное смещение от воздействия нагрузки вращающегося элемента, которое приводит к неконтролируемому нарушению соосности.
Аналогом является ступица транспорта.
Раскрытие сущности изобретения
Магнито-разгруженная ступица (далее МРС) представляет собой сочетание ступицы транспорта и магнитной подвески, которая включает в себя набор из одного цилиндрического полого постоянного магнита, который намагничен вдоль вала МРС, и двух постоянных магнитов, которые намагничены перпендикулярно валу МРС (далее комплект магнитов), общая сила магнитного взаимодействия Fm которых направлена в радиальном направлении против внешней радиальной силы нагрузки на МРС. За счет полной или частичной разгрузки подшипника МРС сила трения Fтр уменьшается. Комплект магнитов размещен внутри ступицы.
В общем случае комплект магнитов можно устанавливать между вращающимся колесом и шасси транспорта. Но колесо смещается вертикально на пружинах амортизатора относительно шасси транспорта на десятки сантиметров. Сила взаимодействия магнитов Fm нелинейно убывает примерно обратно пропорционально квадрату расстояния между магнитами. Комплект магнитов также можно устанавливать между вращающимся колесом и амортизатором. Но дорожная грязь, обледенение и магнитный мусор приведут к заклиниванию колеса. Поэтому более эффективным и работоспособным оказывается встраивание комплекта магнитов непосредственно в барабан ступицы. Отклонение барабана ступицы относительно вала не превышает люфта подшипников, что позволяет существенно уменьшить воздушный кольцевой зазор между магнитами. Минимизированная толщина воздушного кольцевого зазора обеспечивает получение значительной силы взаимодействия магнитов Fm при малой массе комплекта магнитов. Объем внутри барабана МРС защищен от пыли, грязи, ржавчины и влаги сальниками подшипника, что предупреждает заклинивание и примерзание магнитов.
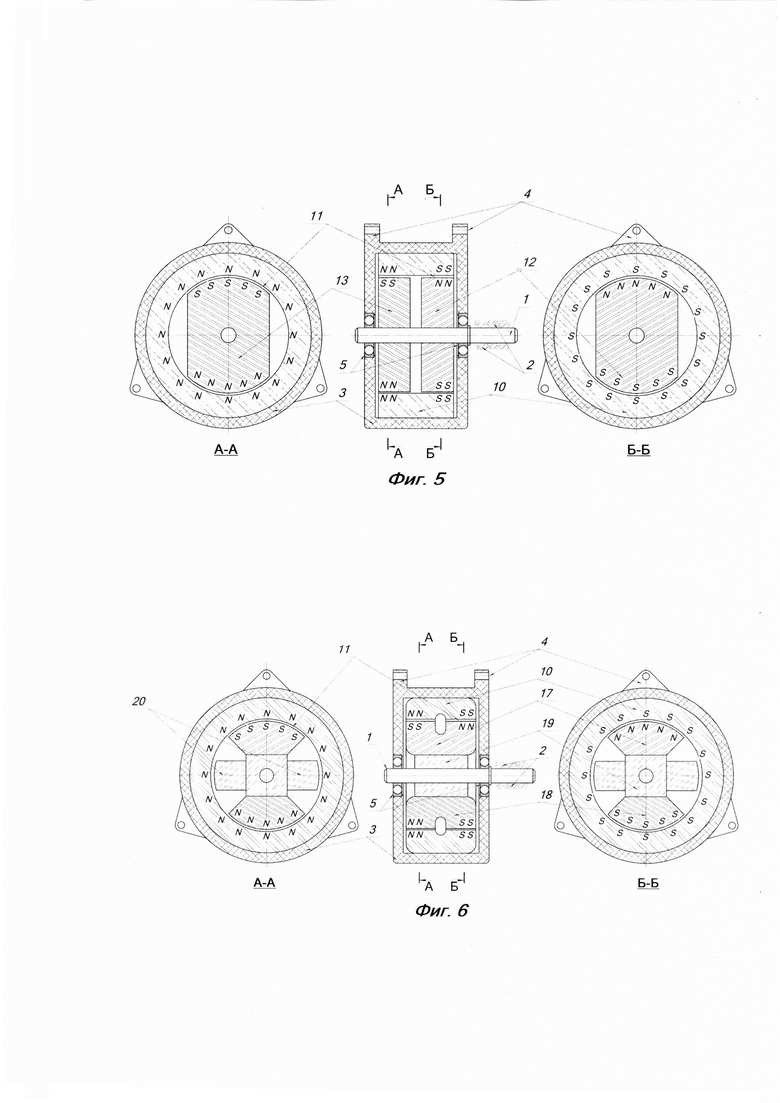
Принцип работы комплекта магнитов 10, 12 и 13 показан на фиг. 5. Неподвижный вал 1 закреплен на амортизаторе 2 шасси транспорта. Цилиндрический полый магнит 10, который намагничен вдоль своей оси, соосно закреплен внутри барабана 3. Правое основание цилиндрического полого магнита 10 имеет, например, S-полюс, а левое основание N-полюс. На валу 1, на расстоянии друг от друга, закреплены два вертикальных магнита левый 12 и правый 13, которые намагничены перпендикулярно валу 1 в вертикальном направлении. Неподвижный вертикальный магнит правый 12 своей верхней частью с N-полюсом притягивается к S-полюсу вращающегося цилиндрического полого магнита 10, а своей нижней частью с S-полюсом отталкивается от S-полюса вращающегося цилиндрического полого магнита 10. Неподвижный вертикальный магнит левый 13 своей верхней частью с S-полюсом притягивается к N-полюсу вращающегося цилиндрического полого магнита 10, а своей нижней частью с N-полюсом отталкивается от N-полюса вращающегося цилиндрического полого магнита 10. Между полюсами вертикальных магнитов и цилиндрическим полым магнитом 10 остается воздушный кольцевой зазор 11.
Взаимодействие комплекта магнитов приводит к появлению общей магнитной силы Fm. Сила взаимодействия магнитов Fm отжимает вниз вращающийся барабан 3 относительно неподвижного вала 1, что разгружает подшипники МРС.
Зависимость силы Fтр трения от силы Р нагрузки на МРС при постоянном коэффициенте трения k и постоянном значении силы взаимодействия магнитов Fm отражается на графике фиг. 3 ломаной линией 16.
При нулевой силе Р нагрузки на МРС в точке 14 сила трения Fтр равна:
Fтр=Fm*k, где
Fтр - сила трения, которая возникает в подшипнике,
Fm - сила взаимодействия магнитов,
k - коэффициент трения качения подшипника.
При увеличении силы Р нагрузки на МРС, сила Fтр трения линейно уменьшается, по формуле: Fтр=(Fm - P) * k, где
Fтр - сила трения, которая возникает в подшипнике,
Fm - сила взаимодействия магнитов,
P – сила нагрузки, которая передается от амортизатора транспорта,
k - коэффициент трения качения подшипника.
На отрезке ломаной линии 16 графика от точки 14 до точки 15 вал 1 отжимается силой взаимодействия магнитов Fm вверх. Нагрузку от вала 1 принимают на себя верхние шарики подшипника 5.
В точке 15 появляется эффект магнитной левитации. В этой точке сила Р нагрузки равна компенсирующей силе Fm взаимодействия магнитов. В итоге нагрузка на подшипник МРС становится равной нулю. В точке 15 все шарики подшипника разгружены, поэтому сила Fтр трения равна нулю.
Вправо от точки 15 сила Fтр трения линейно увеличивается и определяется формулой
Fтр=(P - Fm)*k, где
Fтр - сила трения, которая возникает в подшипнике,
P – сила нагрузки на МРС,
Fm - сила взаимодействия магнитов,
k - коэффициент трения качения подшипника.
При увеличении веса транспорта на отрезке вправо от точки 15 ломаной линии 16 сила P нагрузки на МРС преодолевает силу Fm взаимодействия магнитов, вследствие чего вал 1 прижимается вниз. Нагрузку от вала 1 принимают на себя нижние шарики подшипника 5, но сила Fтр трения всегда будет меньше, чем в обычной ступице. Вследствие уменьшения нагрузки на шарики износ подшипника уменьшается и его срок службы увеличивается.
Радиально-упорные подшипники 5 берут на себя аксиальные нагрузки на поворотах и сохраняют величину воздушного кольцевого зазора 11 при ударах от неровностей дороги.
Малой величиной воздушного кольцевого зазора 11 МРС и использованием современных постоянных магнитов обеспечивается значения силы Fm взаимодействия магнитов, сравнимые с весом транспорта.
Краткое описание чертежей
Фиг. 1 Ступица транспорта с вращающимся барабаном, например автомобили или велосипеда, где 1 – вал, 2 – амортизатор, 3 – барабан, 4 – кронштейн крепления, 5 – подшипник радиально-упорный.
Фиг. 2 Ступица транспорта с вращающейся валом, например осью колесной пары трамвая, где 1 - вал, 2 – амортизатор, 3 – барабан, 4 – кронштейн крепления, 5 – подшипник радиально-упорный, 6 – диск колеса.
Фиг. 3 График силы трения в ступице, где 7 – график зависимости силы трения в ступице-прототипе, приведенном на фиг. 1 или фиг. 2 от нагрузки, 14 – точка силы трения Fтр при нулевой силе Р нагрузки на МРС, 15 – точка, в которой наблюдается эффект магнитной левитации, 16 – ломаная линия зависимости силы Fтр трения в МРС от силы P нагрузки на МРС. Трение покоя и собственный вес ступицы на графике не учитывается, координата Fтр – отражает силу трения в ступице-прототипе и в МРС, координата P – отражает силу нагрузки на ступицу-прототип и на МРС.
Фиг. 4 Магнитный подшипник с вращающимся барабаном, где 1 - вал, 3 - барабан, 8 - подшипник упорный, 9 – цилиндрический магнит, 10 – цилиндрический полый магнит, 11 – воздушный кольцевой зазор, N – северный полюс магнита, S – южный полюс магнита.
Фиг. 5 Принцип работы комплекта магнитов в МРС, где 1 - вал, 2 – амортизатор шасси транспорта, 3 – барабан, 4 - кронштейны крепления, 5 – подшипник радиально-упорный, 10 – цилиндрический полый магнит, 11 – воздушный кольцевой зазор, 12 – вертикальный магнит правый, 13 – вертикальный магнит левый, N – северный полюс магнита, S – южный полюс магнита.
Фиг. 6 МРС с вращающимся барабаном, где 1 - вал из немагнитного материала, 2 – амортизатор шасси транспорта, 3 – барабан из немагнитного материала, 4 - кронштейны крепления, 5 – подшипник радиально-упорный, 10 – цилиндрический полый магнит с U-образным продольным профилем, 11 – воздушный кольцевой зазор, 17 – U-образный магнит верхний, 18 – U-образный магнит нижний, 19 – узел фиксации U-образных магнитов, 20 – сетчатая емкость с влагопоглощающим материалом, например силикагелем, N – северный полюс магнита, S – южный полюс магнита.
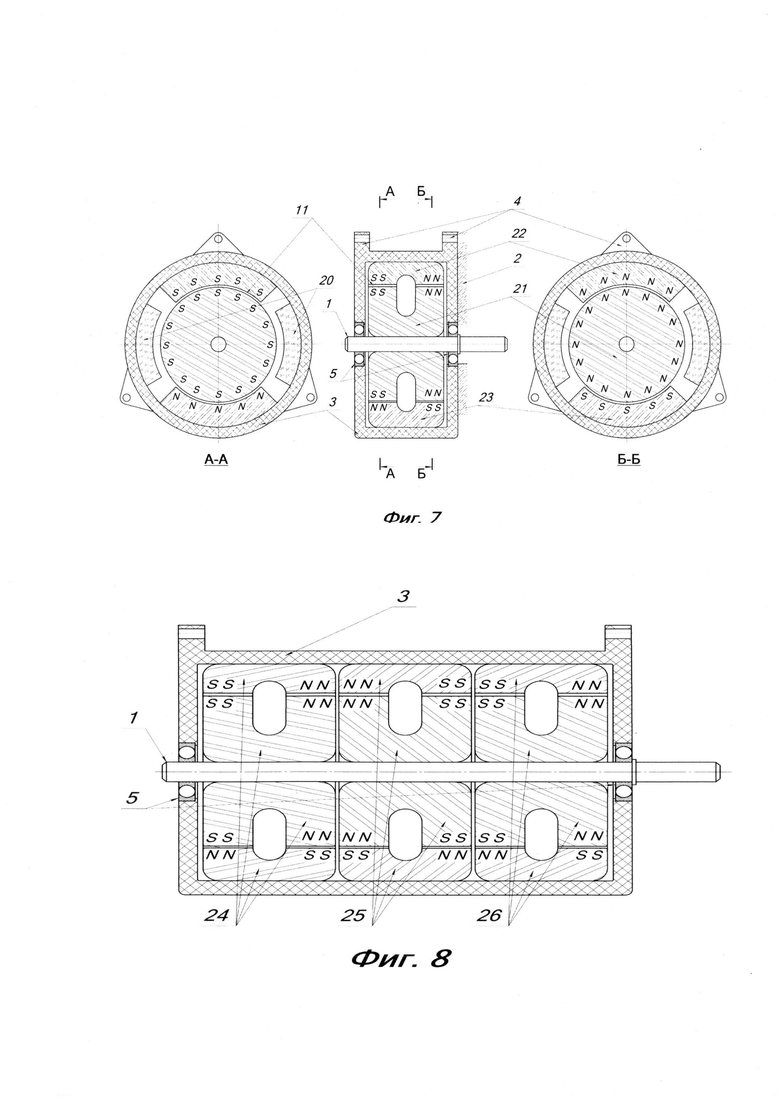
Фиг. 7 МРС с вращающейся валом, где 1 - вал из немагнитного материала, 2 – амортизатор шасси транспорта, 3 – барабан из немагнитного материала, 4 - кронштейн крепления, 5 – подшипник радиально-упорный, 11 – воздушный кольцевой зазор, 20 – сетчатая емкость с влагопоглощающим материалом, например силикагелем, 21 – цилиндрический магнит с U-образным продольным сечением, 22 – верхний седлообразный магнит с U-образным продольным сечением, 23 – нижний седлообразный магнит с U-образным продольным сечением, N – северный полюс магнита, S – южный полюс магнита.
Фиг. 8 МРС с несколькими комплектами магнитов, где 1 - вал, 3 – барабан, 25 – комплект магнитов первый, 26 – комплект магнитов второй, 27 – комплект магнитов третий, N – северный полюс магнита, S – южный полюс магнита.
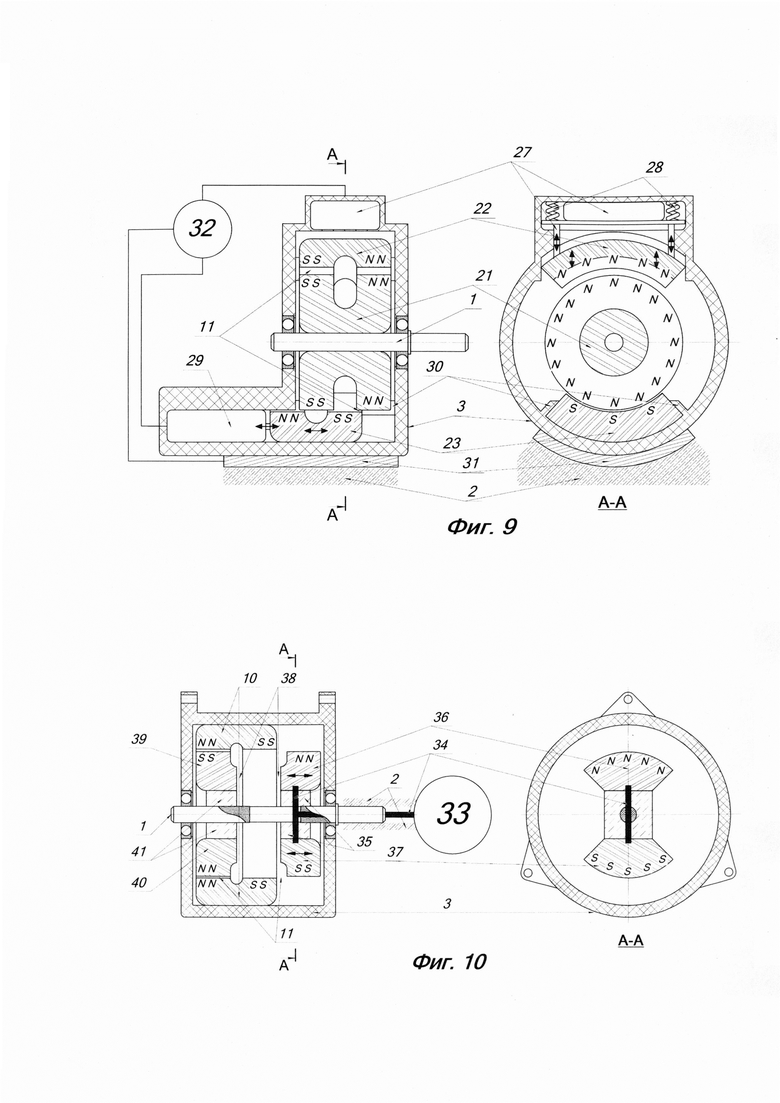
Фиг. 9 МРС с вращающимся валом и с настройкой на изменение веса транспорта, где 1 – вал из немагнитного материала, 2 – амортизатор шасси транспорта, 3 – барабан из немагнитного материала, 11 – воздушный кольцевой зазор, 21 – цилиндрический магнит с U-образным продольным сечением, 22 – верхний седлообразный магнит с U-образным продольным сечением, 23 – нижний седлообразный магнит с U-образным продольным сечением, 27 – механизм радиального смещения, например верхнего 22 седлобразного магнита, 28 – разгружающая пружина, 29 – механизм аксиального смещения, например нижнего 23 седлобразного магнита, 30 - направляющие нижнего 23 седлообразного магнита, 31 - датчик измерения нагрузки, 32 – блок управления, N – северный полюс магнита, S – южный полюс магнита.
Фиг. 10 МРС с вращающимся барабаном и с настройкой на изменение веса транспорта, где 1 – неподвижный вал из немагнитного материала, 2 – амортизатор шасси транспорта, 3 – вращающийся барабан из немагнитного материала, 10 – цилиндрический полый магнит с U-образным продольным сечением, 11 – воздушный кольцевой зазор, 33 – механизм аксиального смещения, 34 – Т-образный толкатель правых половинок U-образных магнитов, 35 - скользящий по валу узел крепления правых половинок U-образных магнитов, 36 – правая половина верхнего седлообразного магнита с U-образным продольным сечением, 37 – правая половина нижнего седлообразного магнита с U-образным продольным сечением, 38 – воздушный аксиальный зазор, 39 – левая половина верхнего седлообразного магнита с U-образным продольным сечением, 40 – левая половина нижнего седлообразного магнита с U-образным продольным сечением, 41 – узел крепления левых половинок U-образных магнитов, N – северный полюс магнита, S – южный полюс магнита.
Осуществление изобретения
МРС выполненный по фиг. 5 работоспособен, но недостаточно эффективен из-за замыкания магнитных полей, между вертикальными магнитами 12 и 13 и по материалу барабана 3.
Замыкание магнитных потоков через барабан 3 и вал 1 можно избежать путем применения немагнитных материалов, например, барабан отливается из силумина, а вал изготавливается из нержавеющей стали.
Увеличение расстояния между этими магнитами приводит к увеличению габаритов МРС и увеличению массы и стоимости вращающегося цилиндрического полого магнита. Замыкание полей между вертикальными магнитами 12 и 13 фиг. 5 решается, например, путем их замены на U-образный магнит верхний 17 и U-образный магнит нижний 18 как показано на фиг. 6.. U-образные магниты закреплены на узле фиксации U-образных магнитов 19. Магнитопроводы U-образных магнитов не пересекаются с валом 1 Расположение полюсов цилиндрического полого магнита 10 не изменяется. Расположение полюсов магнитов 17 и 18 и их взаимодействие с полюсами цилиндрического полого магнита 10 сохраняется и соответствует описанию работы МРС по фиг. 5. Для повышения эффективности вращающийся цилиндрический полый магнит 10 выполняется, например с U-образным продольным сечением, причем кольцевые полюса магнита направляются в сторону вала. Под продольным сечением подразумевается плоскость, в которой лежит вал 1.
Узел фиксации U-образных магнитов, 19 закреплен на валу 1 и выполнен из немагнитного материала, например латуни.
Между U-образными магнитами 17 или 18 и цилиндрическим полым магнитом 10 остается воздушный кольцевой зазор 11.
Взаимодействие комплекта магнитов приводит к появлению магнитной силы Fm. Сила Fm взаимодействия магнитов отжимает вниз вращающийся барабан 3 относительно неподвижного вала 1.
Внутренний объем барабана защищен от воды сальниками подшипника прототипа, но внутри барабана возможна конденсация влаги от перепада температур. Вода может просачиваться и через сальники. При отрицательных температурах вода в воздушном кольцевом зазоре 11 замерзает, магниты заклиниваются. Транспорт не сможет тронуться с места. Для предупреждения примерзания, в свободных местах барабана устанавливаются сетчатая емкость 20 с влагопоглощающим материалом, например силикагелем.
Принцип работы комплекта магнитов применим так же в альтернативном МРС с вращающимся валом, который показан на фиг. 7. МРС крепится своим неподвижным барабаном 3 на амортизаторе 2 шасси транспорта. Цилиндрический полый магнит 21 закреплен на вращающемся валу 1. Магнит имеет U-образное продольное сечение и обращен своими кольцевыми полюсами от вала 1 к полюсам верхнего седлообразного магнита с U-образным продольным сечением 22 и к полюсам нижнего седлообразного магнита с U-образным продольным сечением 23. Седлообразные магниты 22 и 23 закреплены внутри неподвижного барабана 3 сверху и снизу, как показано на фиг. 7. Верхний седлообразный магнит 22 своим S-полюсом отталкивает вниз S-полюс цилиндрического полого магнита 21 и своим N-полюсом отталкивает N-полюс цилиндрического полого магнита 21. Нижний седлообразный магнит 23 своим N-полюсом притягивает вниз S-полюс цилиндрического полого магнита 21 и своим S-полюсом притягивает вниз N-полюс цилиндрического полого магнита 21. Взаимодействие комплекта магнитов приводит к появлению магнитной силы Fm. Сила взаимодействия магнитов Fm отжимает вниз вращающийся вал 1 относительно барабана 3, который закреплен на амортизаторе.
Между седлообразными магнитами 22 или 23 и цилиндрическим полым магнитом 21 остается воздушный кольцевой зазор 11 минимальной толщины.
В тех случаях, когда требуется увеличить силу взаимодействия магнитов Fm без увеличения диаметра барабана или уменьшить диаметр барабана на валу поочередно закрепляются несколько комплектов магнитов, которые прижимаются друг другу одноименными полюсами магнитов, как показано на фиг. 8. Например, N-полюс цилиндрического полого магнита комплекта магнитов 24 прижат к соседнему N-полюсу цилиндрического полого магнита комплекта магнитов 25. Далее S-полюс цилиндрического полого магнита комплекта магнитов 25 прижат к соседнему S-полюсу цилиндрического полого магнита комплекта магнитов 26. Аналогично совмещаются последовательно одноименные полюса седлообразных магнитов последующих комплектов магнитов, например, N-полюс верхнего магнита комплекта магнитов 24 прижат к соседнему N-полюсу верхнего магнита комплекта магнитов 25 и S-полюс нижнего магнита комплекта магнитов 24 прижат к соседнему S-полюсу нижнего магнита комплекта магнитов 25.
Как следует из ломаной линии 16 графика фиг. 3, наиболее выгодным является режим левитации в точке 15. Режим левитации достигается способами:
- установкой МРС с необходимой фиксированной силой взаимодействия магнитов, например по индивидуальным заказам, на определенный вес гоночного электромобиля,
- подбором веса груза, перевозимого транспортом, например, выпускаются серии велосипедов или инвалидных колясок с указанием в их паспортах рекомендуемого диапазона веса пользователя,
- применением МРС с настройкой на изменение веса транспорта путем радиального и (или) аксиального смещения некоторых магнитов или (и) частей магнитов в комплекте магнитов
Пример радиального смещения магнита показан в верхней части фиг. 9. В МРС с вращающимся валом верхний седлообразный магнит 22 смещается в радиальном направлении механизмом радиального смещения 27. Небольшое изменение толщины воздушного зазора эффективно влияет на значение силы взаимодействия магнитов Fm, но требуют от механизма 27 радиального смещения значительных усилий. Разгрузочные пружины 28 могут устанавливаться для облегчения работы механизма смещения.
Пример аксиального смещения магнита показан в нижней части фиг. 9. В МРС с вращающимся валом нижний седлообразный магнит 23 смещается в аксиальном направлении механизмом аксиального смещения 29. Для аксиального смещения магнита достаточно небольших усилий. Но значительная величина перемещения магнитов увеличивает габарит МРС. В положении магнита 23, как показано на фиг. 9, магнитные потоки цилиндрического полого магнита 21 замыкаются сердечником полюса SS магнита 23 и сила взаимодействия магнита 23 с цилиндрическим полым магнитом 21 минимальна, что уменьшает силу взаимодействия магнитов Fm, Направляющие 30 обеспечивают постоянство воздушного кольцевого зазора 11.
Пример аксиального смещения части магнита показан в средней части фиг. 10. В МРС с вращающимся барабаном механизм аксиального смещения магнитов 33 приводит в движение Т-образный толкатель 34, плечи которого перемещаются в продольной прорези вала 1. Плечи Т-образного толкателя смещают по горизонтали скользящий по валу узел 35 крепления правых половинок 36 и 37 U-образных магнитов. При перемещении U-образных магнитов изменяется воздушный аксиальный зазор 38, что изменяет силу взаимодействия магнитов Fm. Оставшиеся левые половины 39 и 40 U-образных магнитов закреплены на неподвижном узле 41 крепления левых половинок U-образных магнитов и не меняют своего положения.
Настройка на изменение веса транспорта механизмов радиального или (и) аксиального смещения выполняется вручную, например, путем вращения винта отверткой, или автоматически от сигналов блока управления 32.
Для автоматической настройки, между МРС и амортизатором 2, встраивается датчик измерения нагрузки 31 фиг. 9. Сигнал от датчика обрабатывается в блоке управления 32. Блок управления вырабатывает сигнал управления механизмами смещения, которые обеспечивается оптимальное расположение магнитов. Во время движения, неровности дороги приводят к непрерывному изменению сигнала датчика. Сигнал датчика состоит из постоянной составляющей, определяемой весом транспорта и случайными отклонениями сигнала, определяемыми полотном дороги. Для выделения постоянного составляющей блок управления 32 содержит интегрирующее устройство.
Величина воздушного кольцевого зазора может контролироваться блоком управления различными способами. Например, установкой датчика измерения толщины воздушного кольцевого зазора, установкой датчика положения магнита. Но можно обойтись и без применения отдельного датчика, например, при использовании в механизме радиального или аксиального смещения шагового двигателя, который на парковке уменьшает воздушный кольцевой или аксиальный зазор до упора магнитов, а после запуска двигателя и измерения нагрузки на МРС, блоком управления устанавливается оптимальная величина воздушного зазора, путем расчета и исполнения количества шагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный подшипник | 2019 |
|
RU2724913C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| Звукосниматель | 1977 |
|
SU688920A1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| Радиально-упорный магнитный подшипник | 2019 |
|
RU2714055C1 |
| ВЕТРОВАЯ СИСТЕМА ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ, СИСТЕМА ПОСТОЯННЫХ МАГНИТОВ И ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРОЭНЕРГИИ В МЕХАНИЧЕСКУЮ СИЛУ | 2004 |
|
RU2383778C2 |
| Синхронный электродвигатель для винта вертолета | 2019 |
|
RU2708382C1 |
| Система на магнитных подшипниках | 2016 |
|
RU2626461C1 |
| УСТРОЙСТВО ПРИВОДА КЛАПАНА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2578929C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |

Магнито-разгруженная ступица (далее МРС) предназначена для установки в колесах транспорта, например электромобилей, в роторах турбин и других устройствах с вращающимся ротором или статором. Принцип работы заключается в разгрузке подшипников ступицы магнитами. Магнито-разгруженная ступица состоит из вала (1), на который напрессованы два радиально-упорных подшипника с сальниками, и напрессованного на эти подшипники барабана с, например, кронштейнами крепления. Ступица дополнительно снабжена комплектом магнитов, включающим в себя один цилиндрический полый постоянный магнит (10), который закреплен на барабане и намагничен вдоль свой оси, и два постоянных магнита (12, 13), которые закреплены на валу (1) и намагничены перпендикулярно валу (1). Между магнитами остается воздушный кольцевой зазор (11). Воздушный зазор (11) исключает трение между магнитами. Когда сила магнитов равна нагрузке на МРС, трение в подшипниках равно нулю. Наступает режим магнитной левитации. На основе принципа работы МРС осуществляются различные варианты реализации. Например, с вращающимся барабаном и неподвижной осью. С вращающейся осью и неподвижным барабаном. С несколькими комплектами магнитов. С настройкой на изменение веса транспорта. Технический результат: снижение силы трения и расхода энергии на движение, уменьшение износа, шума и увеличение срока службы подшипника ступицы без снижения качества сцепления колеса с полотном дороги. 10 з.п. ф-лы, 10 ил.
1. Магнито-разгруженная ступица (далее МРС), состоящая из вала, на который напрессованы два радиально-упорных подшипника с сальниками, и напрессованного на эти подшипники барабана с, например, кронштейнами крепления, отличающаяся тем, что ступица дополнительно снабжена комплектом магнитов, включающим в себя один цилиндрический полый постоянный магнит, который закреплен на барабане и намагничен вдоль свой оси, и два постоянных магнита, которые закреплены на валу и намагничены перпендикулярно валу МРС, при этом между магнитами остается воздушный кольцевой зазор, а сила Fm магнитного взаимодействия направляется в радиальном направлении против внешней радиальной силы P нагрузки на МРС, причем при нулевой силе Р нагрузки на МРС сила трения Fтр транспортного средства отличается от нуля и равна Fтр=Fm* k, где
Fтр - сила трения, которая возникает в подшипнике,
Fm - сила взаимодействия магнитов,
k - коэффициент трения качения подшипника,
но при увеличении силы Р нагрузки на МРС в направлении против силы Fm взаимодействия магнитов сила Fтр трения, которая вычисляется по формуле
Fтр=(Fm - P)* k, где
Fтр - сила трения, которая возникает в подшипнике,
Fm - сила взаимодействия магнитов,
P – сила нагрузки на МРС,
k - коэффициент трения качения подшипника,
линейно уменьшается и достигает нулевого значения при силе P нагрузки на МРС равной силе взаимодействия магнитов Fm, чем достигается эффект магнитной левитации, а при дальнейшем увеличении силы нагрузки на МРС в прежнем направлении, например при увеличении веса транспорта, сила Fтр трения, которая вычисляется по формуле
Fтр=(P - Fm)* k, где
Fтр - сила трения, которая возникает в подшипнике,
P - сила нагрузки на МРС,
Fm - сила взаимодействия магнитов,
k - коэффициент трения качения подшипника,
линейно возрастает.
2. МРС по п. 1, отличающаяся тем, что вал выполнен неподвижным, например, как у ступицы автомобиля, мотоцикла или велосипеда, а с целью отжимания барабана вниз относительно неподвижного вала комплект магнитов состоит из цилиндрического полого постоянного магнита, который закреплен горизонтально во вращающемся барабане из немагнитного материала, а постоянные магниты выполнены в виде двух закрепленных на вращаемся валу из немагнитного материала на расстоянии друг от друга вертикальных магнитов, левого и правого, которые намагничиваются в противоположных направлениях, причем полюса цилиндрического полого магнита вместе с барабаном притягиваются к верхним полюсам вертикальных магнитов и отталкиваются от нижних полюсов вертикальных магнитов, чем обеспечивается разгрузка подшипников.
3. МРС по п.1, отличающаяся тем, что с целью исключения частичного замыкания магнитных потоков между полюсами магнитов комплект магнитов состоит из цилиндрического полого постоянного магнита, который закреплен на вращающемся барабане, а постоянные магниты выполнены в виде двух горизонтальных магнитов U-образного сечения, верхнего и нижнего, которые закреплены друг над другом на неподвижном валу из немагнитного материала с помощью немагнитного узла фиксации U-образных магнитов, так что полюсы верхнего магнита направлены вверх относительно горизонта, а полюсы нижнего магнита направлены вниз, причем полюса цилиндрического полого магнита вместе с барабаном притягиваются к верхним полюсам горизонтальных магнитов и отталкиваются от нижних полюсов горизонтальных магнитов, чем обеспечивается разгрузка подшипников путем отжимания вниз относительно неподвижного вала вращающегося барабан.
4. МРС по п. 1, отличающаяся тем, что вал выполнен вращающимся, например, как у ступицы колесной пары трамвая, а с целью отжимания вала вниз от неподвижного барабана комплект магнитов состоит из цилиндрического полого постоянного магнита, который намагничен вдоль своей оси, закреплен соосно на вращающемся валу из немагнитного материала, а постоянные магниты выполнены в виде двух горизонтальных седлообразных магнитов U-образного сечения, верхнего и нижнего, которые расположены в барабане из немагнитного материала сверху и снизу и закреплены вдоль его оси, а намагничены горизонтально и параллельно вращающемуся валу, но в противоположных направлениях относительно друг друга, причем полюса верхнего седлообразного магнита отталкиваются от полюсов цилиндрического полого постоянного магнита, а полюса нижнего седлообразного магнита притягиваются к полюсам вращающегося цилиндрического полого магнита, чем обеспечивается разгрузка подшипников.
5. МРС по п. 1, отличающаяся тем, что с целью увеличения силы Fm взаимодействия магнитов цилиндрический полый постоянный магнит выполнен с U-образным продольным сечением, причем получившиеся кольцевые полюса магнита направлены и намагничены в радиальном направлении в сторону полюсов остальных магнитов комплекта.
6. МРС по п. 1, отличающаяся тем, что с целью уменьшения диаметра барабана и/или увеличения силы Fm взаимодействия магнитов поочередно устанавливаются дополнительные комплекты магнитов, которые располагаются вдоль вала, например, колесной пары вагона метро и примыкают друг другу одноименными полюсами магнитов, например N-полюс цилиндрического полого магнита любого комплекта совмещен с N-полюсом цилиндрического полого магнита соседнего комплекта, N-полюс верхнего магнита любого комплекта совмещен с N-полюсом верхнего магнита соседнего комплекта и S-полюс нижнего магнита любого комплекта совмещен с S-полюсом нижнего магнита соседнего комплекта.
7. МРС по п. 1, отличающаяся тем, что с целью увеличения силы Fm взаимодействия магнитов толщина воздушного кольцевого зазора между полюсами цилиндрического полого магнита и полюсами остальных магнитов уменьшается до технологически допустимого значения, исключающего механическое соприкосновение магнитов и учитывающего люфт подшипников в конце срока эксплуатации.
8. МРС по п. 1, отличающаяся тем, что с целью регулировки силы Fm взаимодействия магнитов путем изменения радиального и/или аксиального смещения некоторых магнитов и/или частей магнитов из комплекта магнитов, причем при смещении магнитов относительно их оптимального расположения или при разрыве целого магнита на части, сила Fm взаимодействия магнитов уменьшается, что позволяет восстанавливать режим магнитной левитации МРС при уменьшении веса транспорта.
9. МРС по п. 1, отличающаяся тем, что с целью облегчения работы механизму радиального или аксиального смещения между неподвижной частью МРС и смещаемым магнитом устанавливается одна или несколько разгрузочных пружин, усилие которых направлено против силы взаимодействия магнитов или их частей.
10. МРС по п. 1, отличающаяся тем, что с целью автоматической регулировки силы Fm взаимодействия магнитов при изменении веса транспорта между неподвижной частью МРС и амортизатором транспорта добавлен датчик измерения нагрузки на МРС, например тензодатчик, которым измеряется сила Р нагрузки на МРС со стороны транспорта, и блок управления, в котором анализируется и интегрируется сигнал от датчика измерения нагрузки, причем блоком управления вырабатывается сигнал управления механизмами радиального и/или аксиального смещения и контролируется положение смещающегося магнита.
11. МРС по п. 1, отличающаяся тем, что с целью предотвращения примерзания магнитов друг к другу при отрицательных температурах из-за конденсации влаги и/или проникновения воды через сальники в воздушный кольцевой зазор в свободном внутреннем объеме, например на неподвижной части МРС, установлены емкости, например сетчатые, с влагопоглощающим материалом, например силикагелем, причем конструкцией МРС допускается их замена при техобслуживании.
| WO 2012027870 A1, 08.03.2012 | |||
| СПОСОБ ОБЕСПЕЧЕНИЯ ЗАЗОРА В БЕЗПОДШИПНИКОВОМ КОЛЕСЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662359C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
| Магнитная опора | 1975 |
|
SU667716A1 |
| СПОСОБ ПРОИЗВОДСТВА ОКИСИ ПРОПИЛЕНА | 2006 |
|
RU2397977C2 |

