УРОВЕНЬ ТЕХНИКИ
[0001] Запас хода транспортного средства с питанием от аккумулятора ограничен состоянием заряда аккумулятора. Водитель транспортного средства с питанием от аккумулятора отвечает за контроль состояния заряда аккумулятора примерно так же, как водитель транспортного средства, работающего на бензине, отвечает за контроль уровня заправки топливного бака. Отсутствие контроля состояния заряда аккумулятора может оставить транспортное средство с питанием от аккумулятора в затруднительном положении, или иначе не позволить ему достичь места назначения. Для помощи водителю транспортного средства в контроле состояния заряда аккумулятора транспортное средство с питанием от батареи часто представляет водителю транспортного средства измеренное или расчетное состояние заряда аккумулятора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
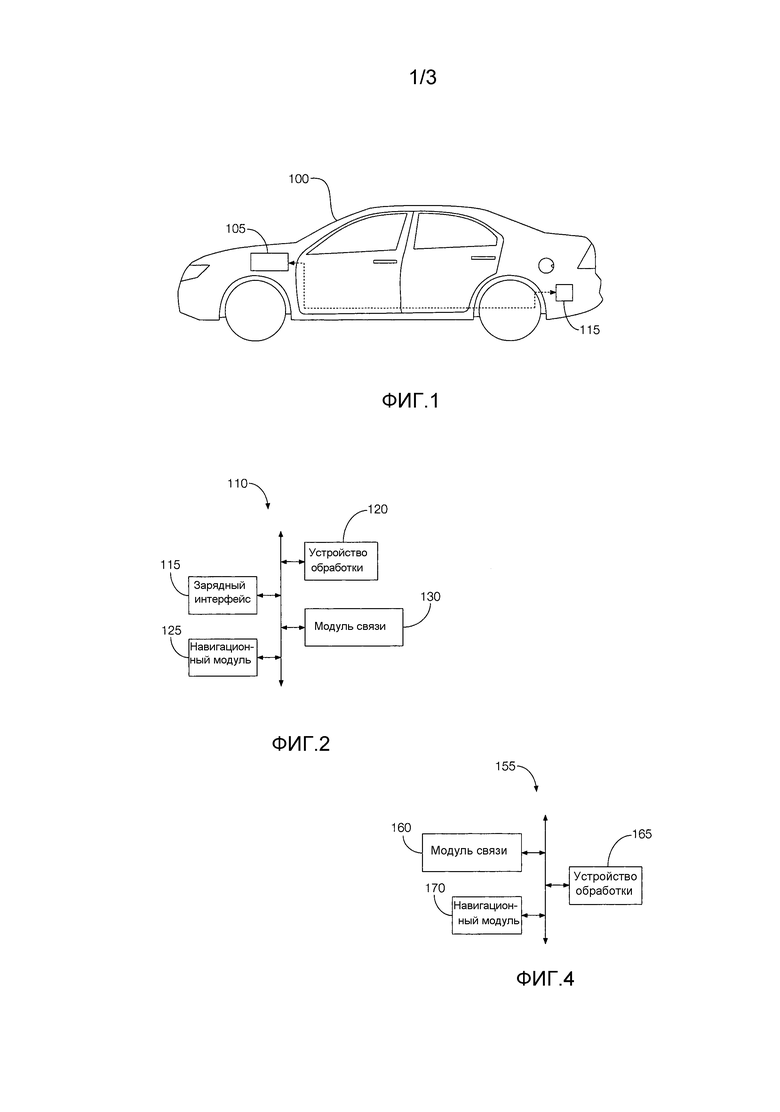
[0002] Фиг. 1 иллюстрирует примерное транспортное средство, которое имеет систему, учитывающую состояния заряда аккумуляторов транспортного средства и велосипеда при формировании маршрутов к выбранному месту назначения.
[0003] Фиг. 2 представляет собой примерную блок-схему системы транспортного средства, которая может быть встроена в транспортное средство по Фиг. 1.
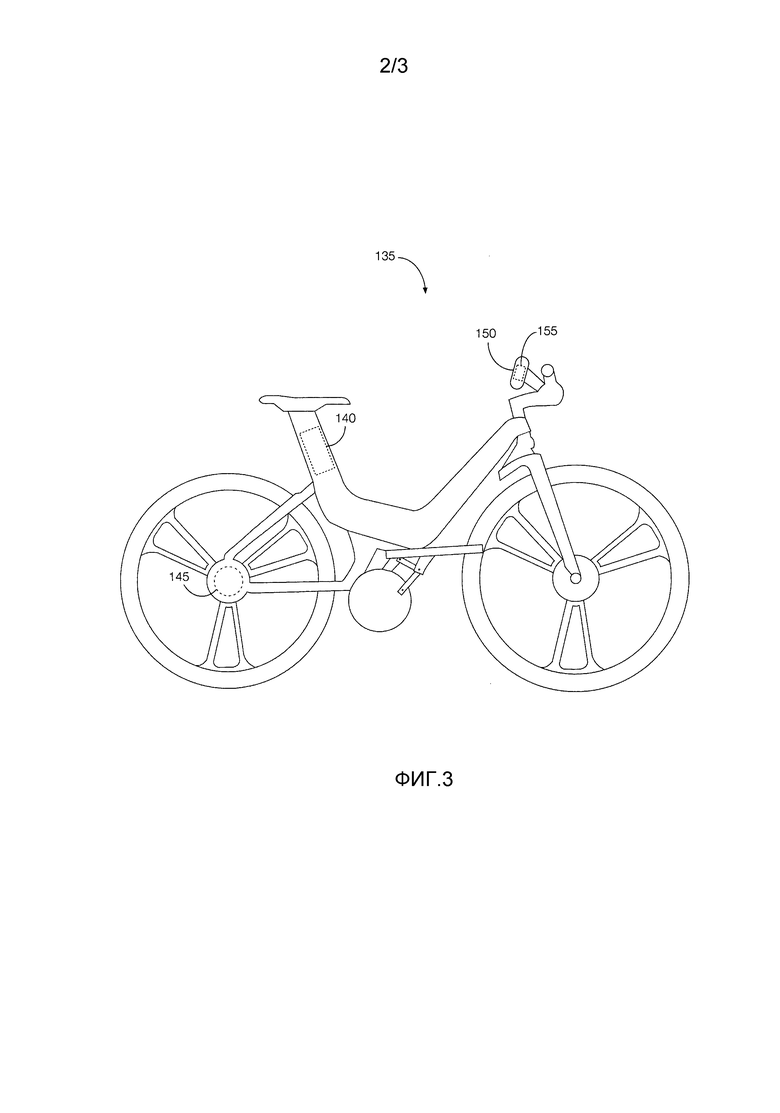
[0004] Фиг. 3 иллюстрирует примерный велосипед, который может быть использован с транспортным средством и системой транспортного средства на Фиг. 1 и 2.
[0005] Фиг. 4 представляет собой блок-схему примерного мобильного устройства, которое может быть встроено в или использовано с велосипедом на Фиг. 3.
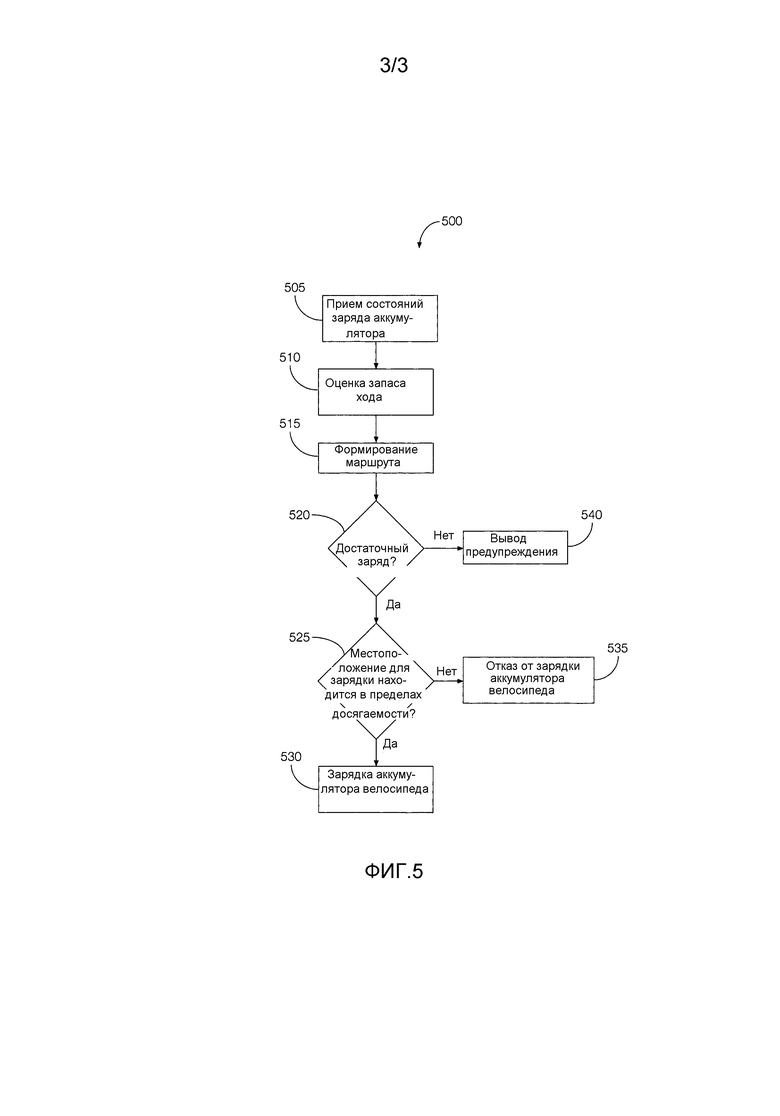
[0006] Фиг. 5 представляет собой блок-схему примерного процесса, который может быть выполнен системой транспортного средства или мобильным устройством.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0007] Водители транспортных средств с доступом к различным типам электрических транспортных средств могут быть способны лучше перемещаться по густонаселенным городским районам. Например, при движении к месту назначения в районе с затрудненным движением электрическое транспортное средство, например, автомобиль или грузовик с питанием от аккумулятора, может быть использовано для достижения водителем транспортного средства промежуточного местоположения на окраине района с затрудненным движением. Далее водитель транспортного средства может пересесть на другое электрическое транспортное средство, например на велосипед с питанием от аккумулятора. Водитель транспортного средства может использовать велосипед с питанием от аккумулятора для движения из промежуточного района в место назначения.
[0008] Электрический велосипед может быть размещен в электрическом транспортном средстве, и электрическое транспортное средство может заряжать электрический велосипед посредством общего зарядного интерфейса. Кроме того, электрическое транспортное средство может включать в себя систему, которая имеет устройство обработки, запрограммированное для определения состояния заряда аккумулятора транспортного средства и аккумулятора велосипеда. Устройство обработки дополнительно оценивает запас хода транспортного средства и велосипеда на основании состояний заряда. Навигационный модуль может быть запрограммирован для формирования маршрута к месту назначения на основании оцененного запаса хода транспортного средства и велосипеда.
[0009] С помощью этой системы водитель транспортного средства будет знать, имеет ли электрическое транспортное средство достаточное питание от аккумулятора для достижения промежуточного местоположения, и имеет ли электрический велосипед достаточное питание от аккумулятора для движения из промежуточного местоположения в место назначения и из места назначения обратно в промежуточное местоположение на одном заряде. Кроме того, система может определять, будет ли аккумулятор транспортного средства иметь достаточный заряд для движения электрического транспортного средства из промежуточного местоположения в местоположение для зарядки, и может ли электрическое транспортное средство заряжать аккумулятор велосипеда при движении из промежуточного местоположения в местоположение для зарядки.
[0010] В качестве альтернативы, хотя она рассматривается применительно к электрическим транспортным средствам, идея может быть применена и к другим типам транспортных средств, например транспортным средствам, работающим на бензине, или гибридным транспортным средствам, включая гибридные электрические транспортные средства с подзарядкой. Для транспортных средств, работающих на бензине, или гибридных транспортных средств аккумулятор электрического велосипеда может заряжаться посредством бензинового двигателя или другого компонента силового агрегата в дополнение или вместо аккумулятора транспортного средства. Зарядка аккумулятора электрического велосипеда посредством бензинового двигателя может увеличивать запас хода электрического велосипеда.
[0011] Элементы, показанные на чертежах, могут принимать многие различные формы и включают в себя множественные и/или альтернативные компоненты и оборудование. Примерные проиллюстрированные компоненты не предназначены для ограничения. Кроме того, могут быть использованы дополнительные или альтернативные компоненты и/или варианты выполнения.
[0012] Как проиллюстрировано на Фиг. 1, электрическое транспортное средство 100 питается от бортового аккумулятора 105 и включает в себя систему 110 транспортного средства (см. Фиг. 2) которая может формировать маршрут к месту назначения на основании состояний заряда бортового аккумулятора 105, а также аккумуляторов других транспортных средств, например электрического велосипеда 135 (см. Фиг. 3). Бортовой аккумулятор 105 может быть выполнен с возможностью обеспечения электропитания любому количеству подсистем или аксессуаров транспортного средства. В качестве дополнения или альтернативы бортовой аккумулятор 105 может обеспечивать электропитание двигателю, который может приводить в движение транспортное средство 100.
[0013] Кроме того, вместо зарядки электрического велосипеда 135 посредством бортового аккумулятора 105 система 110 транспортного средства может быть выполнена с возможностью управления бензиновым двигателем или другими компонентами силового агрегата для заряда велосипеда 135. Таким образом, система 110 может быть встроена в транспортные средства, работающие на бензине, и гибридные транспортные средства, включающие в себя гибридные электрические транспортные средства с подзарядкой.
[0014] Хотя проиллюстрирован тип кузова седан, электрическое транспортное средство 100 может включать в себя любое пассажирское или коммерческое транспортное средство, такое как автомобиль, грузовик, спортивно-утилитарное транспортное средство, такси, автобус и т.д. В некоторых возможных подходах электрическое транспортное средство 100 представляет собой автономное транспортное средство, выполненное с возможностью работы в автономном (например, без водителя) режиме, частично автономном режиме и/или неавтономном режиме. Велосипед 135 (см. Фиг. 3) может быть размещен в транспортном средстве 100, например, в багажнике или другом отделении или прикреплен для перевозки сверху или сзади транспортного средства 100.
[0015] Далее, на Фиг. 2 система 110 транспортного средства может включать в себя зарядный интерфейс 115, устройство 120 обработки и навигационный модуль 125.
[0016] Зарядный интерфейс 115 может позволять бортовому аккумулятору 105 электрически соединяться с источником питания, который может включать в себя бензиновый двигатель, другой аккумулятор, например аккумулятор 140 велосипеда (см. Фиг. 3 и 4), или тот и другой. При соединении с источником питания бортовой аккумулятор 105 может заряжаться через зарядный интерфейс 115. То есть состояние заряда бортового аккумулятора 105 может увеличиваться, когда источник питания подключен к зарядному интерфейсу 115. В качестве дополнения или альтернативы зарядный интерфейс 115 может способствовать зарядке аккумулятора 140 велосипеда бортовым аккумулятором 105 или другим источником питания. Таким образом, путем подключения аккумулятора 140 велосипеда к зарядному интерфейсу 115 электрическая энергия от бортового аккумулятора или другого источника 150 питания может заряжать аккумулятор 140 велосипеда. Когда система 110 встроена в транспортное средство, работающее на бензине, или гибридное транспортное средство, включая гибридное электрическое транспортное средство с подзарядкой, зарядный интерфейс 115 может быть использован для соединения аккумулятора 140 велосипеда с другими типами источников 150 питания, например с бензиновым двигателем на борту транспортного средства 100.
[0017] Устройство 120 обработки может быть запрограммировано для контроля аккумуляторов, подключенных к зарядному интерфейсу 115. Таким образом, устройство 120 обработки может определять состояния заряда бортового аккумулятора 105, аккумулятора 140 велосипеда или того и другого. Кроме того, устройство 120 обработки может быть выполнено с возможностью оценки запаса хода посредством аккумуляторов. Запас хода может зависеть от состояния заряда и типа транспортного средства (например, автомобиля или велосипеда). Так как велосипеды обычно легче, чем большинство автомобилей, велосипед может двигаться дальше с помощью аккумулятора 140 велосипеда, имеющего такое же или более низкое состояние заряда относительно, например, бортового аккумулятора 105.
[0018] Навигационный модуль 125 может быть запрограммирован для определения положения транспортного средства 100. Навигационный модуль 125 может включать в себя приемник системы глобального позиционирования (GPS), выполненный с возможностью триангуляции положения транспортного средства 100 относительно спутников или наземных передающих вышек. В связи с этим навигационная система может быть выполнена с возможностью беспроводной связи. Навигационная система может быть дополнительно запрограммирована для разработки маршрутов из текущего местоположения в выбранное место назначения, а также отображения карты и указания направления движения к выбранному месту назначения посредством, например, устройства пользовательского интерфейса. При формировании маршрута навигационный модуль 125 может учитывать оцененный запас хода как транспортного средства 100, так и велосипеда 135. Например, маршрут может указывать на использование транспортного средства 100 для движения из начального (т.е. текущего) местоположения в промежуточное местоположение. Так как движение по маршруту в промежуточное местоположение основано на транспортном средстве 100, маршрут может включать в себя дороги или другую инфраструктуру, где разрешено движение транспортного средства. Промежуточное местоположение может включать в себя автомобильную стоянку на окраине густонаселенного городского района или другого района, где движение транспортного средства затруднено. Как только транспортное средство 100 припарковано, маршрут может указывать использование велосипеда 135 для движения из промежуточного местоположения в выбранное место назначения. Маршрут из промежуточного местоположения в выбранное место назначения может включать в себя инфраструктуру, которая подходит для движения велосипеда. Примеры такой инфраструктуры могут включать в себя велосипедные дорожки, велосипедные полосы, пешеходные дорожки (где допустимо) и т.д. в дополнение к дорогам.
[0019] Навигационный модуль 125 может быть дополнительно запрограммирован для учета того, имеет ли аккумулятор 140 велосипеда достаточный заряд для возвращения к транспортному средству 100 в промежуточном местоположении из выбранного места назначения, и имеет ли бортовой аккумулятор 105 достаточный заряд для движения из промежуточного местоположения к ближайшей станции зарядки. Если нет, навигационный модуль 125 может предлагать пользователю поиск альтернативного маршрута или зарядки бортового аккумулятора 105 или аккумулятора 140 велосипеда до выхода на маршрут. Как рассмотрено выше, бортовой аккумулятор 105 или аккумулятор 140 велосипеда могут заряжаться от бензинового двигателя или другого источника питания, в таком случае станция для зарядки может включать в себя автозаправочную станцию. Кроме того, навигационный модуль 125 может учитывать, может ли аккумулятор 140 велосипеда быть заряжен бортовым аккумулятором 105, например, через зарядный интерфейс 115, когда транспортное средство 100 движется из промежуточного местоположения к ближайшей станции зарядки. Навигационный модуль 125 может сообщать, может ли бортовой аккумулятор 105 и заряжать аккумулятор 140 велосипеда и достигать местоположения зарядки, устройству 120 обработки или зарядному интерфейсу 115. Устройство 120 обработки или зарядный интерфейс 115 могут облегчать зарядку аккумулятора 140 велосипеда соответственно, что может включать в себя ожидание зарядки аккумулятора 140 велосипеда, пока бортовой аккумулятор 105 не будет по меньшей мере частично заряжен.
[0020] Модуль связи может быть запрограммирован для поддержки проводной или беспроводной связи между компонентами транспортного средства 100 и другими устройствами, например удаленным сервером или даже другим транспортным средством при использовании, например, протокола связи типа транспортное средство-транспортное средство. Модуль связи может быть выполнен с возможностью приема сообщений и передачи сообщений вышке оператора сотовой связи и сети передачи данных телематических служб (SDN), связанным с транспортным средством 100, которые, в свою очередь, устанавливают связь с мобильным устройством пользователя, например, мобильным телефоном, планшетным компьютером, переносным компьютером, брелоком или любым другим электронным устройством, выполненным с возможностью беспроводной связи через другого или того же самого оператора сотовой связи. Сотовая связь с телематическим приемопередатчиком посредством SDN также может быть инициирована от устройства, соединенного с интернетом, например ПК, переносного компьютера, портативного компьютера или телефона, соединенного с WiFi. Модуль связи также может быть запрограммирован для осуществления связи непосредственно от транспортного средства 100 с удаленным устройством пользователя или любым другим устройством, использующим любое количество протоколов связи, например, Bluetooth®, Bluetooth® с низким энергопотреблением или WiFi. Пример протокола связи типа транспортное средство-транспортное средство может включать в себя, например, протокол специализированной связи ближнего действия (DSRC).
[0021] Соответственно? модуль связи может быть выполнен с возможностью приема сигналов, которые может использовать навигационный модуль 125, например, для триангуляции местоположения транспортного средства 100 или велосипеда 135. Кроме того, модуль связи может быть запрограммирован для передачи маршрутов, формируемых навигационным модулем 125, например, велосипеду 135 или мобильному устройству 150 (см. Фиг. 4). В дополнение или в качестве альтернативы модуль связи может быть запрограммирован для передачи состояния заряда аккумулятора 140 велосипеда или бортового аккумулятора 105 велосипеду 135 или мобильному устройству 150.
[0022] Фиг. 3 иллюстрирует примерный велосипед 135, который может быть использован с транспортным средством 100 и системой 110 транспортного средства на Фиг. 1 и 2. Велосипед 135 может представлять собой электрический велосипед с электродвигателем 145, питаемым источником питания, например, аккумулятором 140 велосипеда. Аккумулятор 140 велосипеда может обеспечивать электродвигатель 145 электрическим зарядом. В ответ электродвигатель 145 может вращаться. Вращение электродвигателя 145 может приводить в движение колеса, приводящие в движение велосипед 135. Аккумулятор 140 велосипеда может быть выполнен с возможностью соединения с зарядным интерфейсом 115 на борту транспортного средства 100. В связи с этим, бортовой аккумулятор 105 может заряжать аккумулятор 140 велосипеда. Альтернативно или в дополнение аккумулятор 140 велосипеда может быть заряжен, когда транспортное средство 100 или зарядный интерфейс 115 подключены к источнику питания.
[0023] Мобильное устройство 150, осуществляющее систему 155 велосипеда, может быть встроенным в или иначе используемым с велосипедом 135. Далее на Фиг. 4 мобильное устройство 150 может включать в себя модуль 160 связи, устройство 165 обработки и навигационный модуль 170, выполняющий систему 155 велосипеда. Эти компоненты могут работать подобно соответствующим компонентам транспортного средства 100, описанным выше на Фиг. 2. То есть модуль 160 связи велосипеда 135 может облегчать проводную или беспроводную связь, устройство 165 обработки может быть запрограммировано для оценки запаса хода транспортного средства 100 или велосипеда 135 на основании состояний заряда бортового аккумулятора 105 или аккумулятора 140 велосипеда, и навигационный модуль 170 может быть запрограммирован для формирования маршрутов к выбранному месту назначения, которое учитывает оцененный запас хода. Маршруты, формируемые навигационным модулем 170, могут включать в себя маршрут из текущего местоположения в промежуточное местоположение на основании состояния заряда бортового аккумулятора 105 и маршрут из промежуточного местоположения в выбранное место назначения на основании состояния заряда аккумулятора 140 велосипеда. Навигационный модуль 170 может учитывать инфраструктуру доступную для транспортного средства 100 и велосипеда 135 при формировании маршрута. Кроме того, навигационный модуль 170 может учитывать, может ли аккумулятор 140 велосипеда заряжаться от бортового аккумулятора 105 или бензинового двигателя (если он имеется), например, через зарядный интерфейс 115, когда транспортное средство 100 движется из промежуточного местоположения к ближайшей станции зарядки. Навигационный модуль 170 может сообщать, может ли бортовой аккумулятор 105 и заряжать аккумулятор 140 велосипеда и достигать местоположения зарядки, устройству 165 обработки или зарядному интерфейсу 115. Устройство 165 обработки или зарядный интерфейс 115 могут облегчать зарядку аккумулятора 140 велосипеда соответственно, что может включать в себя ожидание зарядки аккумулятора 140 велосипеда, пока бортовой аккумулятор 105 не будет по меньшей мере частично заряжен. Соответственно, система, встроенная в транспортное средство 100, описанная выше на Фиг. 1 и 2, может быть осуществлена на мобильном устройстве 150, например, мобильном телефоне, переносном компьютере, планшетном компьютере или т.п.
[0024] Фиг. 5 представляет собой блок-схему примерного процесса 500, который может быть выполнен системой 110 транспортного средства или системой 155 велосипеда. Как рассмотрено выше, система 155 может быть выполнена, например, мобильным устройством 150, встроенным в или используемым с велосипедом 135. Процесс 500 может быть запущен, например, когда аккумулятор 140 велосипеда подключен к зарядному интерфейсу 115 на борту транспортного средства, и после выбора пользователем места назначения.
[0025] В блоке 505 устройство 120, 165 обработки может принимать данные о состоянии заряда, связанные с бортовым аккумулятором 105, аккумулятором 140 велосипеда или тем и другим. В некоторых примерах данные о состоянии заряда собираются зарядным интерфейсом 115, расположенным на транспортном средстве 100 и передаются устройству 120, 165 обработки, например, через модуль 130, 160 связи посредством протокола проводной или беспроводной связи.
[0026] В блоке 510 устройство 120, 165 обработки может оценивать запас хода транспортного средства 100 и велосипеда 135. Запас хода транспортного средства 100 может быть оценен по состоянию заряда бортового аккумулятора 105 или количеству топлива в бензобаке. Запас хода велосипеда 135 может быть оценен по состоянию заряда аккумулятора 140 велосипеда. Оценки запаса хода могут быть переданы навигационному модулю 125, 170.
[0027] В блоке 515 навигационный модуль 125, 170 может принимать оцененный запас хода и формировать маршрут к выбранному месту назначения. Маршрут может включать в себя маршрут из текущего местоположения транспортного средства 100 в промежуточное местоположение. Маршрут в промежуточное местоположение может быть основан на состоянии заряда бортового аккумулятора 105 или аккумулятора 140 велосипеда (т.е. имеет ли аккумулятор 140 велосипеда достаточный заряд до места назначения местоположения и обратно в промежуточное местоположение), и может основываться на инфраструктуре, доступной для транспортного средства 100. Маршрут может дополнительно включать в себя маршрут из промежуточного местоположения в выбранное место назначения на основании состояния заряда аккумулятора 140 велосипеда. Кроме того, маршрут в выбранное место назначения может определять инфраструктуру, доступную для движения велосипеда.
[0028] В блоке 520 принятия решений навигационный модуль 125, 170 может определять, имеет ли бортовой аккумулятор 105 достаточный заряд для достижения транспортным средством 100 местоположения зарядки из промежуточного местоположения. В контексте транспортных средств, работающих на бензине или гибридных транспортных средств навигационный модуль 125, 170 может определять, имеет ли топливный бак достаточно топлива для достижения транспортным средством 100 автозаправочной станции. Если так, процесс 500 может продолжаться в блоке 525. В противном случае, процесс 500 может продолжаться в блоке 540.
[0029] В блоке 525 принятия решений навигационный модуль 125, 170 может определять может ли бортовой аккумулятор 105 или другой источник питания позволить достижение транспортным средством 100 местоположения для зарядки, которое применительно к транспортным средствам, работающим на бензине, может включать в себя автозаправочную станцию, при этом также заряжая аккумулятор 140 велосипеда через зарядный интерфейс 115. Если так, процесс 500 может продолжаться в блоке 530. Если бортовой аккумулятор 105 или другой источник питания не может достигать местоположение зарядки и заряжать аккумулятор 140 велосипеда, процесс 500 может продолжаться в блоке 535.
[0030] В блоке 530 навигационный модуль 125, 170 или устройство 120, 165 обработки могут выводить команду зарядному интерфейсу 115 для зарядки аккумулятора 140 велосипеда с помощью выходной мощности от бортового аккумулятора 105 или бензинового двигателя. Вывод команды может включать в себя вывод сигнала или установку флажкового индикатора. Процесс 500 может завершаться после блока 530.
[0031] В блоке 535 навигационный модуль 125, 170 или устройство 120, 165 обработки могут выводить команду зарядному интерфейсу 115 для отказа от зарядки аккумулятора 140 велосипеда с помощью выходной мощности от бортового аккумулятора 105 или бензинового двигателя. Вывод команды может принимать форму передачи сигнала или установки флажкового индикатора. Процесс 500 может завершаться после блока 530.
[0032] В блоке 540 навигационный модуль 125, 170 или устройство 120, 165 обработки могут выводить предупреждение пользователю, указывающее, что выбранное место назначения находится за пределом досягаемости транспортного средства 100 и велосипеда 135. Предупреждение может включать в себя звуковое предупреждение, визуальное предупреждение или то и другое. Предупреждение может в некоторых примерах давать инструкцию пользователю для доставки транспортного средства 100 к ближайшему местоположению для зарядки так, что состояния заряда бортового аккумулятора 105 и аккумулятора 140 велосипеда могут быть улучшены. Для транспортных средств, работающих на бензине, местоположение зарядки может включать в себя автозаправочную станцию. В некоторых возможных подходах предупреждение может предлагать пользователю указывать должен ли, бензиновый двигатель быть использован для зарядки бортового аккумулятора 105 (если применимо), аккумулятора 140 велосипеда или того и другого. После увеличения по меньшей мере одного из состояний заряда навигационный модуль 125, 170 или устройство 120, 165 обработки 165 могут повторно оценивать, могут ли транспортное средство 100 и велосипед 135 достигать выбранного места назначения при следующем включении цикла или при следующем выборе пользователем места назначения.
[0033] В общем описанные вычислительные системы и/или устройства могут применять любую из некоторых компьютерных операционных систем, включая, но никоим образом не ограничиваясь, версии и/или разновидности операционной системы Ford SYNC®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой компанией Oracle Corporation Redwood Shores, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines of Armonk, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распостраняемых компанией Apple Inc. Купертино, Калифорния, BlackBerry OS, распространяемую компанией Research In Motion, Уотерлу, Канада, и операционной системы Android, разработанной компанией Open Handset Alliance. Примеры вычислительных устройств включают в себя без ограничения бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, портативный компьютер, переносной компьютер или карманный компьютер, или некоторую другую вычислительную систему и/или устройство.
[0034] Вычислительные устройства в общем включают в себя выполняемые компьютером инструкции, причем инструкции могут быть выполняемыми одним или более вычислительными устройствами, такими как те, что перечислены выше. Выполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков программирования и/или технологий, включая, без ограничения и либо отдельно, либо в совокупности, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. В общем процессор (например, микропроцессор) принимает инструкции, например, из памяти, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым выполняя один или более процессов, включая один или более процессов, описанных здесь. Такие инструкции и другие данные могут храниться и передаваться с использованием множества машиночитаемых носителей.
[0035] Машиночитаемый носитель (также называемый считываемым процессором носителем) включает в себя любой постоянный (например, материальный) носитель, который участвует в обеспечении данных (например, инструкций), которые могут считываться компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включая, но, не ограничиваясь, энергонезависимый носитель и энергозависимый носитель. Энергонезависимый носитель может включать в себя, например, оптический или магнитный диски и другую постоянную память. Энергозависимый носитель может включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое обычно представляет собой оперативную память. Такие инструкции могут передаваться посредством одной или более сред передачи, включая коаксиальные кабели, медный провод и волоконную оптику, включая провода, которые содержат системную шину, соединенную с процессором компьютера. Общие формы машиночитаемого носителя включают в себя, например, гибкий диск, гибкий магнитный диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационные карты, бумажные ленты, любой другой физический носитель со структурами отверстий, RAM, PROM, EPROM, FLASH EEPROM, любой другой кристалл или картридж памяти или любой другой носитель, который может считываться компьютером.
[0036] В некоторых примерах элементы системы могут быть выполнены в виде машиночитаемых инструкций (например, программного обеспечения) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), храниться на машиночитаемых носителях, соответствующих им (например, дисках, памятях и т.д.). Компьютерный программный продукт может содержать такие инструкции, которые хранятся на машиночитаемых носителях для выполнения функций, описанных здесь.
[0037] В отношении процессов, систем, способов, эвристических правил и т.д., описанных здесь, следует понимать, что при том, что этапы таких процессов и т.д. были описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть применены на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного здесь. Кроме того, следует понимать, что определенные этапы могут выполняться одновременно, что могут быть добавлены другие этапы, или что определенные этапы, описанные здесь, могут быть исключены. Другими словами, описания процессов приведены здесь для иллюстрации определенных вариантов выполнения, и никоим образом не должны истолковываться так, чтобы ограничивать формулу изобретения.
[0038] Соответственно, следует понимать, что вышеприведенное описание предназначено для иллюстрации, но не ограничения. Многие варианты выполнения и применения, отличные от обеспеченных примеров, будут ясны при прочтении вышеприведенного описания. Объем следует определять не путем обращения к вышеприведенному описанию, а вместо этого следует определять путем обращения к приложенной формуле изобретения вместе с полным объемом эквивалентов, на которые распространяется такая формула изобретения. Предполагается и имеется в виду, что в технологиях, рассмотренных здесь, будут созданы последующие усовершенствования, и что раскрытые системы и способы будут включены в такие последующие варианты выполнения. В общем следует понимать, что заявка предусматривает возможность преобразований и изменений.
[0039] Подразумевается, что все выражения, используемые в формуле изобретения, имеют их обычные значения, которые понятны специалисту в технологиях, описанных здесь, кроме тех случаев, когда здесь явно указано обратное. В частности, упоминание единственного числа и использование выражения «упомянутый» следует понимать как упоминание одного или более из обозначенных элементов, кроме тех случаев, когда пункт формулы изобретения явно указывает обратное.
[0040] Реферат приведен, чтобы позволить читателю быстро определить характер раскрытого технического решения. Он приведен с пониманием того, что он не будет использоваться для интерпретации или ограничения объема или смыслового содержания формулы изобретения. Кроме того, в вышеприведенном подробном описании видно, что различные признаки сгруппированы вместе в различных вариантах выполнения для упрощения раскрытия. Этот способ раскрытия не следует интерпретировать как подразумевающий, что заявленные варианты выполнения требуют больше признаков, чем явно изложено в каждом пункте формулы изобретения. Наоборот, как отражает нижеприведенная формула изобретения, объект изобретения заключается менее чем во всех признаках одного раскрытого варианта выполнения. Таким образом, нижеприведенная формула изобретения настоящим включена в подробное описание, причем каждый пункт формулы является самостоятельным как отдельно заявленный объект изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УМЕНЬШЕННЫЕ СЕТЕВОЙ ПОТОК И ВЫЧИСЛИТЕЛЬНАЯ НАГРУЗКА С ИСПОЛЬЗОВАНИЕМ СРЕДСТВА ДИНАМИЧЕСКОГО ПРОСТРАНСТВЕННОГО И ВРЕМЕННОГО ПЛАНИРОВАНИЯ | 2015 |
|
RU2679248C2 |
| УПРАВЛЕНИЕ СВЕТОВЫМ ИНДИКАТОРОМ ЗАРЯДКИ | 2017 |
|
RU2689461C2 |
| ЗАРЯДНАЯ СТАНЦИЯ ДЛЯ ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2720394C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ВЫБОРА МЕСТА СТОЯНКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2682058C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2688116C2 |
| СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ МУЛЬТИМОДАЛЬНОГО МАРШРУТА ПОЕЗДКИ | 2014 |
|
RU2572279C1 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ СИСТЕМЫ ЭНЕРГОСБЕРЕЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ПЛАНИРОВАНИЯ ПОЕЗДОК | 2011 |
|
RU2578909C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2697178C2 |
| УСТАНОВЛЕННАЯ НА ОБОДЕ КОЛЕСА СИСТЕМА КАТУШЕК И МАГНИТОВ ДЛЯ РЕКУПЕРАЦИИ | 2016 |
|
RU2700251C2 |
Изобретение относится к области транспортных средств, в частности, к системам контроля заряда аккумуляторов транспортных средств. Система контроля заряда аккумулятора транспортного средства содержит зарядный интерфейс, устройство обработки, навигационный модуль. Зарядный интерфейс выполнен с возможностью соединения с аккумулятором велосипеда. Устройство обработки запрограммировано для контроля зарядного интерфейса для определения состояния заряда аккумулятора велосипеда и аккумулятора транспортного средства. Устройство обработки запрограммировано для оценки запаса хода как транспортного средства, так и велосипеда. Навигационный модуль запрограммирован для формирования маршрута в выбранное место назначения на основании оцененного запаса хода как транспортного средства, так и велосипеда. Достигается улучшение контроля заряда аккумулятора транспортного средства. 10 з.п. ф-лы, 5 ил.
1. Система контроля заряда аккумулятора транспортного средства, содержащая:
зарядный интерфейс, выполненный с возможностью соединения с аккумулятором велосипеда;
устройство обработки, запрограммированное для контроля зарядного интерфейса для определения состояния заряда аккумулятора велосипеда и аккумулятора транспортного средства, и при этом устройство обработки запрограммировано для оценки запаса хода как транспортного средства, так и велосипеда; и
навигационный модуль, запрограммированный для формирования маршрута в выбранное место назначения на основании оцененного запаса хода как транспортного средства, так и велосипеда.
2. Система по п. 1, в которой аккумулятор велосипеда по выбору заряжается при соединении с зарядным интерфейсом.
3. Система по п. 2, в которой аккумулятор велосипеда заряжается аккумулятором транспортного средства или силовым агрегатом транспортного средства.
4. Система по п. 1, в которой формирование маршрута в выбранное место назначения включает в себя формирование маршрута из текущего местоположения в промежуточное местоположение и из промежуточного местоположения в выбранное место назначения.
5. Система по п. 4, в которой маршрут из текущего местоположения в промежуточное местоположение основан на состоянии заряда аккумулятора транспортного средства.
6. Система по п. 4, в которой маршрут из промежуточного местоположения в выбранное место назначения основан на состоянии заряда аккумулятора велосипеда.
7. Система по п. 4, в которой навигационный модуль запрограммирован для формирования маршрута из выбранного места назначения в промежуточное местоположение.
8. Система по п. 7, в которой маршрут из выбранного места назначения в промежуточное местоположение основан по меньшей мере частично на состоянии заряда аккумулятора велосипеда.
9. Система по п. 4, в которой навигационный модуль запрограммирован для формирования маршрута из промежуточного местоположения в местоположение для зарядки.
10. Система по п. 9, в которой маршрут в местоположение для зарядки основан по меньшей мере частично на состоянии заряда аккумулятора транспортного средства.
11. Система по п. 1, дополнительно содержащая модуль связи, запрограммированный для беспроводной передачи маршрута мобильному устройству.
| US 6037746 A, 14.03.2000 | |||
| US 7693652 B2, 06.04.2010 | |||
| Асинхронный двигатель | 1960 |
|
SU140485A1 |

