ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие, в общем, относится к транспортным средствам с датчиками системы контроля давления в шинах и, конкретнее, способам расположения перезаряжаемых датчиков системы контроля давления в шинах.
УРОВЕНЬ ТЕХНИКИ
[0002] Транспортные средства имеют датчики системы контроля давления в шинах (TPMS) для каждой шины. Датчики TPMS измеряют давление соответствующей шины транспортного средства. Датчики TPMS расположены на внутренней стороне обода шины. Традиционно замена аккумуляторной батареи датчика TPMS включает удаление колеса и отделение шины от обода. По этой причине датчики спроектированы так, что этой аккумуляторной батареи хватает на семь-десять лет до ее замены. Для этого датчики TPMS экономят их мощность посредством передачи сигналов с низкой частотой. Например, датчик TPMS может осуществлять передачу раз в каждые тридцать секунд.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Приложенная формула изобретения определяет эту заявку. Настоящее описание обобщает аспекты вариантов выполнения и не должно быть использовано для ограничения формулы изобретения. Другие варианты осуществления предусмотрены в соответствии с технологиями, описанными здесь, как будет ясно специалисту в области техники при изучении следующих чертежей и подробного описания, и эти варианты осуществления предназначены для включения в объем этой заявки.
[0004] Раскрыты примерные варианты выполнения для выравнивания датчиков контроля давления в шинах на транспортном средстве. Примерный способ включает в себя расположение передних колес на первом и втором барабанах (dynamometers). Примерный способ также включает в себя выравнивание, с помощью первого и второго барабанов, датчиков контроля давления в шинах передних колес. Примерный способ включает в себя расположение задних колес на первом и втором барабанах. Дополнительно, примерный способ включает в себя выравнивание, с помощью первого и второго барабанов, датчиков контроля давления в шинах задних колес.
[0005] Другой примерный способ включает в себя расположение передних колес транспортного средства на первом и втором барабанах. Примерный способ также включает в себя расположение задних колес транспортного средства на третьем и четвертом барабанах. Дополнительно, примерный способ включает в себя независимое вращение первого и второго барабанов для расположения передних датчиков системы контроля давления в шинах передних колес. Примерный способ включает в себя определение положения выравнивания для задних датчиков системы контроля давления в шинах и независимое вращение третьего и четвертого барабанов для расположения задних колес в положении выравнивания.
[0006] Примерная система включает в себя первый набор барабанов, выполненный с возможностью приема первого набора колес, и второй набор барабанов, выполненный с возможностью приема второго набора колес. Примерная система также включает в себя множество детекторов выравнивания. Примерная система включает в себя устройство для выравнивания колес, связанное с возможностью осуществления связи с первым и вторым наборами барабанов и множеством детекторов выравнивания. В примерной системе устройство для выравнивания колес выполнено с возможностью независимого вращения первого набора барабанов для выравнивания первого набора датчиков системы контроля давления в шинах, соответствующего первому набору колес, определения положения выравнивания для второго набора датчиков системы контроля давления в шинах, соответствующего второму набору колес, и независимого вращения второго набора барабанов для расположения второго набора колес в положении выравнивания.
Таким образом, согласно первому аспекту изобретения предложен способ выравнивания датчиков контроля давления в шинах на транспортном средстве, причем способ содержит этапы, на которых: располагают передние колеса на первом и втором барабанах; вращают первое из передних колес до тех пор, пока соответствующий первый из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка первого из датчиков контроля давления в шинах параллельна земле; вращают второе из передних колес до тех пор, пока соответствующий второй из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка второго из датчиков контроля давления в шинах параллельна земле; располагают задние колеса на первом и втором барабанах; и выравнивают, с помощью первого и второго барабанов, датчики контроля давления в шинах задних колес.
Согласно одному варианту осуществления способ включает в себя этапы, на которых: обнаруживают, с помощью детектора выравнивания, когда первый из датчиков контроля давления в шинах расположен так, что вторичная обмотка первого из датчиков контроля давления в шинах параллельна земле; и обнаруживают, с помощью детектора выравнивания, когда второй из датчиков контроля давления в шинах расположен так, что вторичная обмотка второго из датчиков контроля давления в шинах параллельна земле.
Согласно другому варианту осуществления способа обнаружение первого и второго из датчиков контроля давления в шинах включает в себя обнаружение, когда вторичная обмотка соответствующего из датчиков контроля давления в шинах индуктивно связана с первичной обмоткой детектора выравнивания.
Согласно другому варианту осуществления способа обнаружение первого и второго из датчиков контроля давления в шинах включает в себя обнаружение сообщений от соответствующего из датчиков контроля давления в шинах с помощью приемопередатчика детектора выравнивания.
Согласно другому варианту осуществления способа выравнивание датчиков контроля давления в шинах задних колес включает в себя: вращение первого из задних колес до тех пор, пока соответствующий третий из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка третьего из датчиков контроля давления в шинах параллельна земле; и вращение второго из задних колес до тех пор, пока соответствующий четвертый из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка четвертого из датчиков контроля давления в шинах параллельна земле.
Согласно второму аспекту изобретения предложен способ выравнивания датчиков контроля давления в шинах на транспортном средстве, содержащий этапы, на которых: располагают передние колеса транспортного средства на первом и втором барабанах; располагают задние колеса транспортного средства на третьем и четвертом барабанах; независимо вращают первый и второй барабаны для расположения передних датчиков системы контроля давления в шинах передних колес; определяют положение выравнивания для задних датчиков системы контроля давления в шинах; независимо вращают второй и третий барабаны для расположения задних датчиков системы контроля давления в шинах задних колес так, что вторичные обмотки задних датчиков системы контроля давления в шинах параллельны земле; и последовательно независимо вращают третий и четвертый барабаны для расположения задних колес в положении выравнивания.
Согласно одному варианту осуществления способа независимое вращение первого и второго барабанов для расположения первых датчиков системы контроля давления в шинах передних колес включает в себя: вращение первого из передних колес с помощью первого барабана до тех пор, пока соответствующий первый из датчиков системы контроля давления в шинах не будет расположен так, что вторичная обмотка первого из датчиков контроля давления в шинах параллельна земле; и вращение второго из передних колес с помощью второго барабана до тех пор, пока соответствующий второй из датчиков системы контроля давления в шинах не будет расположен так, что вторичная обмотка второго из датчиков контроля давления в шинах параллельна земле.
Согласно другому варианту осуществления способ включает в себя обнаружение, когда вторичная обмотка соответствующего из передних датчиков системы контроля давления в шинах индуктивно связана с первичной обмоткой детектора выравнивания.
Согласно другому варианту осуществления способ включает в себя обнаружение передних датчиков системы контроля давления в шинах с помощью приемопередатчика детекторов выравнивания, расположенных вблизи передних колес.
Согласно другому варианту осуществления способа положение выравнивания основано на расстоянии между первым центром передних шин и вторым центром задних шин и окружности задних шин.
Согласно третьему аспекту изобретения предложена система выравнивания датчиков контроля давления в шинах на транспортном средстве, содержащая: первый набор барабанов, выполненный с возможностью приема первого набора колес; второй набор барабанов, выполненный с возможностью приема второго набора колес, множество детекторов выравнивания; и устройство для выравнивания колес, связанное с возможностью осуществления связи с первым и вторым наборами барабанов и множеством детекторов выравнивания, причем устройство для выравнивания колес выполнено с возможностью: независимого вращения первого набора барабанов для выравнивания первого набора датчиков системы контроля давления в шинах, соответствующего первому набору колес; определения положения выравнивания для второго набора датчиков системы контроля давления в шинах, соответствующего второму набору колес; независимого вращения второго набора колес для расположения второго набора датчиков системы контроля давления в шинах задних колес так, что вторичные обмотки второго набора датчиков системы контроля давления в шинах параллельны земле; и последовательного независимого вращения второго набора барабанов для расположения второго набора колес в положении выравнивания.
Согласно одному варианту осуществления системы один из множества детекторов выравнивания находится вблизи каждого барабана в первом и втором наборах барабанов.
Согласно другому варианту осуществления системы множество детекторов выравнивания выполнены с возможностью обнаружения, когда соответствующий из соответствующих датчиков системы контроля давления в шинах расположен в нижней части соответствующего из ободьев колес одного из наборов колес.
Согласно другому варианту осуществления системы каждый из множества детекторов выравнивания включает в себя первичную обмотку для обнаружения, когда вторичная обмотка соответствующего из датчиков системы контроля давления в шинах индуктивно связана с первичной обмоткой детектора выравнивания.
Согласно другому варианту осуществления системы каждый из множества детекторов выравнивания включает в себя приемопередатчик для обнаружения сообщений от соответствующего из датчиков системы контроля давления в шинах.
Согласно четвертому аспекту изобретения предложен способ выравнивания датчиков контроля давления в шинах на транспортном средстве, содержащий этапы, на которых: для передних колес транспортного средства: (а) располагают левое и правое колеса на первом и втором барабанах соответственно; (б) независимо вращают левое колесо до тех пор, пока вторичная обмотка левого датчика давления в шине не будет параллельна земле; (в) независимо вращают правое колесо до тех пор, пока вторичная обмотка правого датчика давления в шине не будет параллельна земле; и повторяют этапы (а)-(в) для задних колес.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих чертежах. Компоненты на чертежах необязательно выполнены в масштабе и соответствующие элементы могут быть исключены, или в некоторых случаях пропорции могут быть преувеличены так, чтобы подчеркивать и ясно иллюстрировать новые признаки, описанные здесь. В дополнение, компоненты системы могут быть расположены различным образом, как известно в уровне техники. Дополнительно, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на всех нескольких видах.
[0008] Фиг. 1A и 1B иллюстрируют транспортное средство, расположенное на независимых барабанах согласно идеям этого раскрытия.
[0009] Фиг. 2 представляет собой блок-схему электронных компонентов, используемых для управления барабанами на Фиг. 1A и 1B.
[0010] Фиг. 3 представляет собой схему последовательности операций, изображающую примерный способ расположения перезаряжаемых датчиков системы контроля давления в шинах, который может быть осуществлен электронными компонентами на Фиг. 2.
[0011] Фиг. 4 представляет собой другую схему последовательности операций, изображающую примерный способ расположения перезаряжаемых датчиков системы контроля давления в шинах, который может быть осуществлен электронными компонентами на Фиг. 2.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0012] Несмотря на то, что изобретение может быть выполнено в различных формах, на чертежах показаны и будут далее описаны некоторые примерные и неограничивающие варианты выполнения с пониманием того, что настоящее раскрытие должно рассматриваться как иллюстративный пример изобретения и не предназначено для ограничения изобретения конкретными проиллюстрированными вариантами выполнения.
[0013] Перезаряжаемые датчики системы контроля давления в шинах (TPMS) включают в себя вторичные обмотки, которые используются для перезарядки аккумуляторных батарей датчиков TPMS посредством индуктивной связи. По мере того, как электрические и электрические гибридные транспортные средства становятся все более популярными, индуктивные зарядные станции на парковочных площадках (например, в гараже) становятся все более распространенными. Индукционные зарядные станции могут включать в себя режим для зарядки аккумуляторных батарей датчиков TPMS. Обеспечение более частой перезарядки аккумуляторных батарей датчиков TPMS означает, что датчик TPMS может осуществлять передачу чаще. Это позволяет системе контроля давления в шинах обнаруживать и реагировать на проблемы с шинами быстрее. Однако индуктивная зарядка становится менее эффективной (например, более медленной), когда вторичная обмотка датчика TPMS не параллельна первичной обмотке на индуктивной зарядной станции.
[0014] Как раскрыто здесь ниже, после установки датчиков TPMS на ободьях колес и установки шин на колесах колеса транспортного средства располагаются на барабанах. Барабаны независимо вращают колеса. В некоторых примерах два барабана используются для выравнивания одного набора колес (например, передних колес или задних колес) и затем другого набора колес. В некоторых примерах четыре барабана используются для выравнивания четырех колес. Приемники датчиков TPMS располагаются вблизи барабанов. Приемники датчиков TPMS обнаруживают показания датчиков, передаваемые датчиками TPMS, для определения местоположения датчиков TPMS относительно перпендикулярной оси колес. Колеса независимо выравниваются так, что (a) датчики TPMS на передних колесах находятся в по существу одинаковом положении относительно перпендикулярной оси передних колес, (b) датчики TPMS на задних колесах находятся в по существу одинаковом положении относительно перпендикулярной оси задних колес, и (с) относительные положения передних датчиков TPMS и задних датчиков TPMS таковы, что если передние датчики TPMS параллельны первичной обмотке индуктивной зарядной станции, когда транспортное средство проехало вперед на расстояние, которое разделяет передние и задние колеса, задние датчики TPMS будут параллельны первичной обмотке индуктивной зарядной станции.
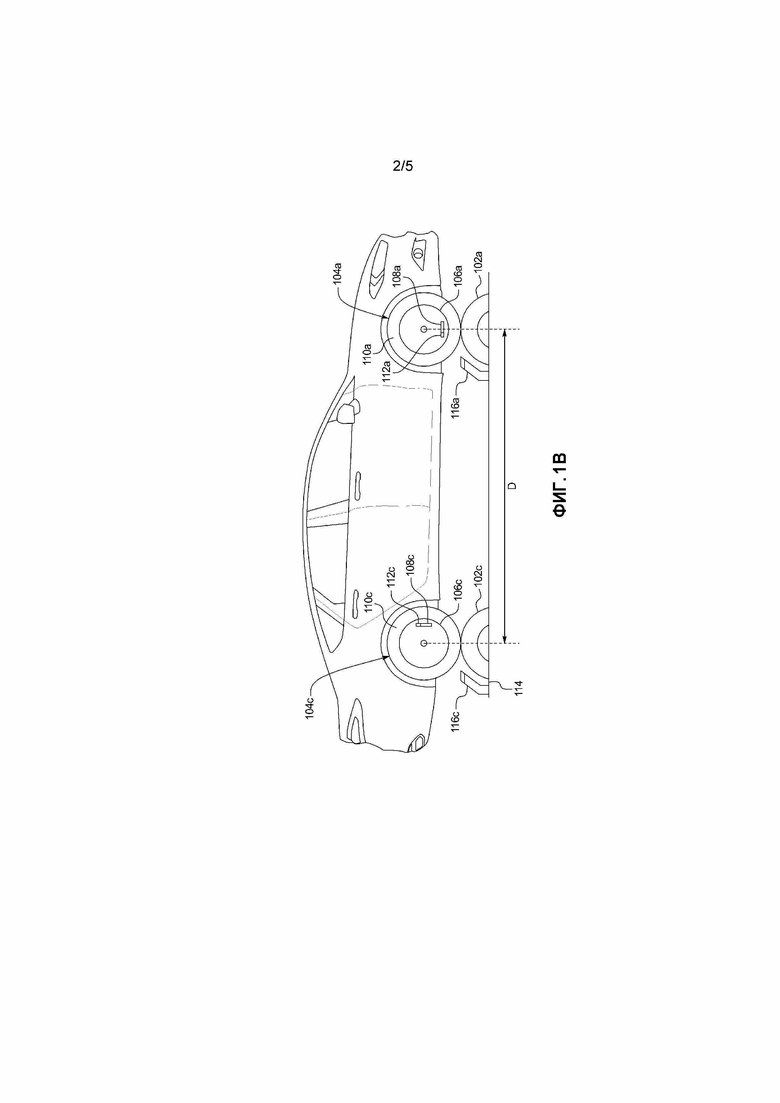
[0015] Фиг. 1A и 1B иллюстрируют транспортное средство 100, расположенное на независимых барабанах 102a, 102b, 102c и 102d согласно идеям этого раскрытия. Транспортное средство 100 (например, седан, грузовой автомобиль, полноприводный внедорожник и т.д.) может представлять собой стандартное транспортное средство с бензиновым двигателем, гибридное транспортное средство, электрическое транспортное средство, транспортное средство на топливных элементах или любой другой тип транспортного средства. Транспортное средство 100 может быть неавтономным, полуавтономным или автономным. Транспортное средство 100 включает в себя части, относящиеся к подвижности, такие как силовой агрегат с двигателем, трансмиссия, подвеска и/или приводной вал. Транспортное средство включает в себя переднее правое колесо 104a, переднее левое колесо 104b, заднее правое колесо 104с и заднее левое колесо 104d. Колеса 104a, 104b, 104c и 104d включают в себя ободья 106a, 106b, 106c и 106d, датчики 108a, 108b, 108c и 108d TPMS и шины 110a, 110b, 110c и 110d соответственно.
[0016] Датчики 108a, 108b, 108c и 108d TPMS расположены между ободьями 106a, 106b, 106c и 106d и шинами 110a, 110b, 110c и 110d. Датчики 108a, 108b, 108c и 108d TPMS контролируют давление соответствующих шин 110a, 110b, 110c и 110d. Для сообщения показаний давления датчики 108a, 108b, 108c и 108d TPMS включают в себя передатчики 112a, 112b, 112c и 112d. Транспортное средство 100 включает в себя приемники (не показаны) на не вращающемся участке узла колеса колес 104a, 104b, 104c и 104d для приема показаний давления от датчиков 108a, 108b, 108c и 108d TPMS. Передатчики 112a, 112b, 112c и 112d имеют короткий диапазон (например, 3-6 дюймов (76,2-152,4 мм) и т.д.) для экономии мощности и для избежания столкновения сигналов друг с другом.
[0017] Барабаны 102a, 102b, 102c и 102d включены в платформу 114 для выравнивания. Барабаны 102a, 102b, 102c и 102d выступают из платформы 114 для выравнивания так, что колеса 104a, 104b, 104c и 104d могут быть расположены на барабанах 102a, 102b, 102c и 102d. Когда колеса 104a, 104b, 104c и 104d расположены на барабанах 102a, 102b, 102c и 102d, вращение каждого из барабанов 102a, 102b, 102c и 102d заставляет соответствующее колесо 104a, 104b, 104c и 104d вращаться. В некоторых примерах платформа 114 для выравнивания включает в себя четыре барабана 102a, 102b, 102c и 102d. В таких примерах четыре колеса 104a, 104b, 104c и 104d располагаются на барабанах 102a, 102b, 102c и 102d одновременно. Альтернативно, в некоторых примерах платформа 114 для выравнивания включает в себя два барабана 102a и 102b. В таких примерах передние колеса 104a и 104b выравниваются отдельно от задних колес 104c и 104d. В некоторых примерах расстояние между барабанами 102a, 102b, 102c и 102d является регулируемым для размещения транспортных средств 100 с различными колесными базами.
[0018] Платформа 114 для выравнивания включает в себя один или более детекторов 116a, 116b, 116c и 116d выравнивания TPMS, расположенных вблизи барабанов 102a, 102b, 102c и 102d. В некоторых примерах платформа 114 для выравнивания включает в себя детекторы 116a, 116b, 116c и 116d выравнивания TPMS для каждого из барабанов 102a, 102b, 102c и 102d. Альтернативно, в некоторых примерах платформа 114 для выравнивания включает в себя один или более портативных детекторов 116a, 116b, 116c и 116d выравнивания TPMS, которые могут быть время от времени расположены (например, вручную или автоматически) вблизи барабанов 102a, 102b, 102c и 102d. В некоторых примерах детекторы 116a, 116b, 116c и 116d выравнивания TPMS включают в себя первичные обмотки для обнаружения, когда вторичная обмотка, соответствующая датчику 108a, 108b, 108c и 108d TPMS, параллельна первичной обмотке. В таких примерах детекторы 116a, 116b, 116c и 116d выравнивания TPMS включают в себя схемы обнаружения нагрузки для обнаружения, когда первичная обмотка детекторов 116a, 116b, 116c и 116d выравнивания TPMS индуктивно связана со вторичной обмоткой датчика 108a, 108b, 108c и 108d TPMS. Альтернативно, в некоторых примерах детекторы 116a, 116b, 116c и 116d выравнивания TPMS обнаруживают передачи от датчиков 108a, 108b, 108c и 108d TPMS, когда датчики 108a, 108b, 108c и 108d TPMS расположены в нижней части колеса 104a, 104b, 104c и 104d.
[0019] Как рассмотрено более подробно ниже в связи с Фиг. 2, барабаны 102a, 102b, 102c и 102d и детекторы 116a, 116b, 116c и 116d выравнивания TPMS связаны с возможностью осуществления связи с устройством 118 для выравнивания колес. Устройство 118 для выравнивания колес располагает датчики 108a, 108b, 108c и 108d TPMS так, что (a) первоначально вторичные обмотки передних датчиков 108a и 108b TPMS параллельны первичной обмотке поверхности перезарядки и (b) после того, как передние датчики 108a и 108b TPMS заряжены, и водитель проезжает вперед для расположения задних колес 104c и 104d на поверхности перезарядки, вторичные обмотки задних датчиков 108c и 108d TPMS становятся параллельны первичной обмотке поверхности перезарядки. Устройство 118 для выравнивания колес управляет вращением барабанов 102a, 102b, 102c и 102d независимо. Дополнительно, устройство 118 для выравнивания колес использует детекторы 116a, 116b, 116c и 116d выравнивания TPMS для определения местоположений датчиков 108a, 108b, 108c и 108d TPMS относительно перпендикулярной оси колес 104a, 104b, 104c и 104d. В некоторых примерах устройство 118 для выравнивания колес определяет расстояние (D) между центром передних колес 104a и 104b и центром задних колес 104c и 104d. В некоторых таких примерах оператор вводит расстояние (D) в устройство 118 для выравнивания колес. Альтернативно, в некоторых таких примерах устройство 118 для выравнивания колес связано с возможностью осуществления связи с базой данных транспортных средств (не показана), которая включает в себя расстояние (расстояния) (D) транспортного средства (транспортных средств) 100, подлежащих выравниванию.
[0020] Фиг. 2 представляет собой блок-схему электронных компонентов 200, используемых для управления барабанами 102a, 102b, 102c и 102d на Фиг. 1A и 1B. Электронные компоненты включают в себя устройство 118 для выравнивания колес, детекторы 116a, 116b, 116c и 116d выравнивания TPMS, барабаны 102a, 102b, 102c и 102d и шину 202 данных. Устройство 118 для выравнивания колес включает в себя процессор или контроллер 204, память 206 и хранилище 208. Процессор или контроллер 204 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограниченных ими: микропроцессор, платформа на базе микроконтроллера, подходящая интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGS) и/или одна или более специализированных интегральных схем (ASIC). Память 206 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, ферроэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на основе мемристора и т.д.), неизменную память (например, EPROM) и память только для чтения. В некоторых примерах память 206 включает в себя множество видов памяти, особенно энергозависимую память и энергонезависимую память. Хранилище 208 может включать в себя любое устройство хранения большой емкости, такое как накопитель на жестком диске и/или твердотельный накопитель.
[0021] Память 206 и хранилище 206 представляют собой считываемый компьютером носитель, в который могут быть внедрены один или более наборов инструкций, таких как программное обеспечение для осуществления способов настоящего раскрытия. Инструкции могут выполнять один или более из способов или логику, которые описаны здесь. В особом варианте выполнения инструкции могут храниться полностью или по меньшей мере частично в любом одном или более из считываемого компьютером носителя и/или в процессоре 204 во время исполнения инструкций.
[0022] Термины «некратковременный считываемый компьютером носитель» и «считываемый компьютером носитель» следует понимать включающими в себя один носитель или множество носителей, таких как централизованная или распределенная база данных и/или связанные кэши и серверы, которые хранят один или более наборов инструкций. Термины «некратковременный считываемый компьютером носитель» и «считываемый компьютером носитель» также включают в себя любой материальный носитель, который способен хранить, шифровать или переносить набор инструкций для исполнения процессором, или которые заставляют систему выполнять любой один или более из способов или операций, раскрытых здесь. В данном контексте термин «считываемый компьютером носитель» точно определен как включающий в себя любой тип считываемого компьютером устройства хранения и/или диска для хранения и как исключающий распространение сигналов.
[0023] Детекторы 116a, 116b, 116c и 116d выравнивания TPMS и барабаны 102a, 102b, 102c и 102d связаны с возможностью осуществления связи с устройством 118 для выравнивания колес по шине 202 данных. Устройство 118 для выравнивания колес принимает информацию о выравнивании от детекторов 116a, 116b, 116c и 116d выравнивания TPMS, которая указывает, когда соответствующие датчики 108a, 108b, 108c и 108d TPMS находятся в нижней части ободьев 106a, 106b, 106c и 106d колес. Устройство 118 для выравнивания колес отправляет сигналы управления для управления вращением барабанов 102a, 102b, 102c и 102d. Шина 202 данных представляет собой любую подходящую шину для сообщения с датчиками (например, детекторами 116a, 116b, 116c и 116d выравнивания TPMS) и приводами (например, барабанами 102a, 102b, 102c и 102d). В некоторых примерах шина 202 данных представляет собой шину Ethernet или полевую шину (IEC 61158).
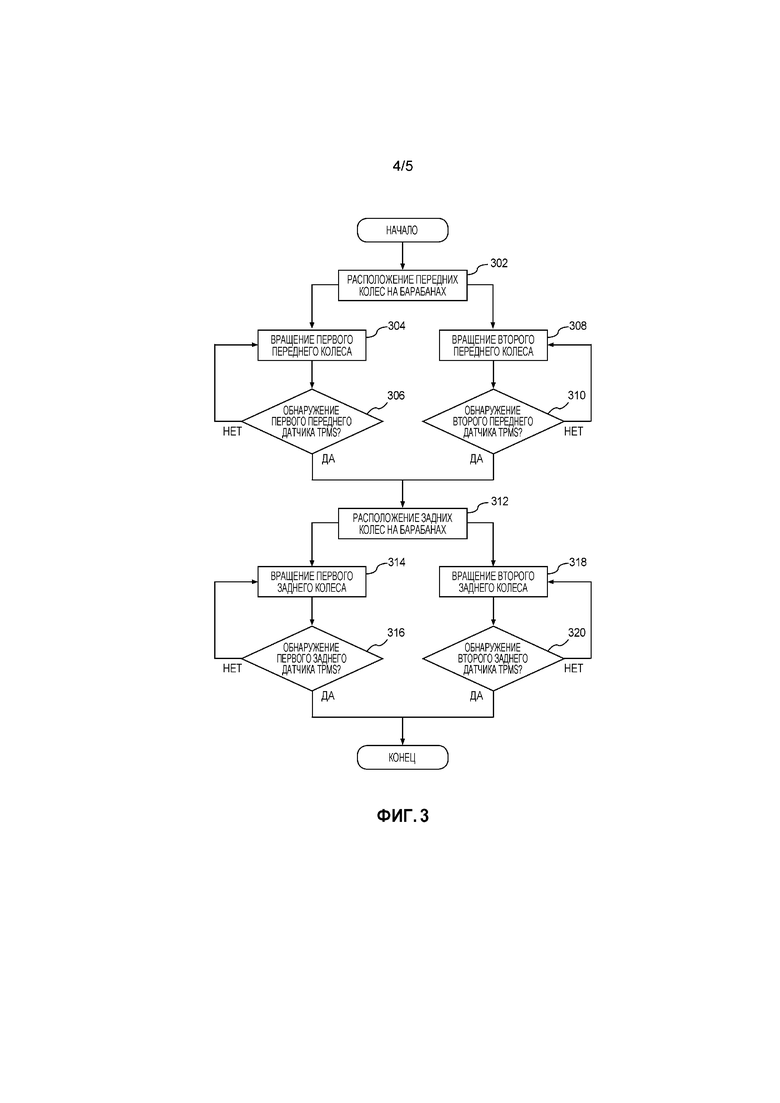
[0024] Фиг. 3 представляет собой схему последовательности операций, изображающую примерный способ для расположения датчиков 108a, 108b, 108c и 108d TPMS, который может быть осуществлен электронными компонентами 200 на Фиг. 2. Схема последовательности операций на Фиг. 3 изображает способ, когда платформа 114 для выравнивания включает в себя два барабана 102a и 102b. Первоначально передние колеса 104a и 104b располагают на барабанах 102a и 102b (блок 302). Устройство 118 для выравнивания колес вращает первое переднее колесо 104а (блок 304). Устройство 118 для выравнивания колес продолжает вращать первое переднее колесо 104а до тех пор, пока первый передний детектор 116а выравнивания TPMS не обнаружит, что первый передний датчик 108а TPMS расположен в нижней части первого переднего колеса 104а (блок 306). Устройство 118 для выравнивания колес вращает второе переднее колесо 104b (блок 308). Устройство 118 для выравнивания колес продолжает вращать второе переднее колесо 104b до тех пор, пока второй передний детектор 116b выравнивания TPMS не обнаружит, что второй передний датчик 108b TPMS расположен в нижней части второго переднего колеса 104b (блок 310).
[0025] Задние колеса 104c и 104d располагают на барабанах 102a и 102b (блок 312). Устройство 118 для выравнивания колес вращает первое заднее колесо 104с (блок 314). Устройство 118 для выравнивания колес продолжает вращать первое заднее колесо 104с до тех пор, пока первый задний детектор 116с выравнивания TPMS не обнаружит, что первый задний датчик 108с TPMS расположен в нижней части первого заднего колеса 104с (блок 316). Устройство 118 для выравнивания колес вращает второе заднее колесо 104d (блок 318). Устройство 118 для выравнивания колес продолжает вращать второе заднее колесо 104d до тех пор, пока второй задний детектор 116d выравнивания TPMS не обнаружит, что второй задний датчик 108d TPMS расположен в нижней части второго заднего колеса 104d (блок 320). Способ на Фиг. 3 затем заканчивается.
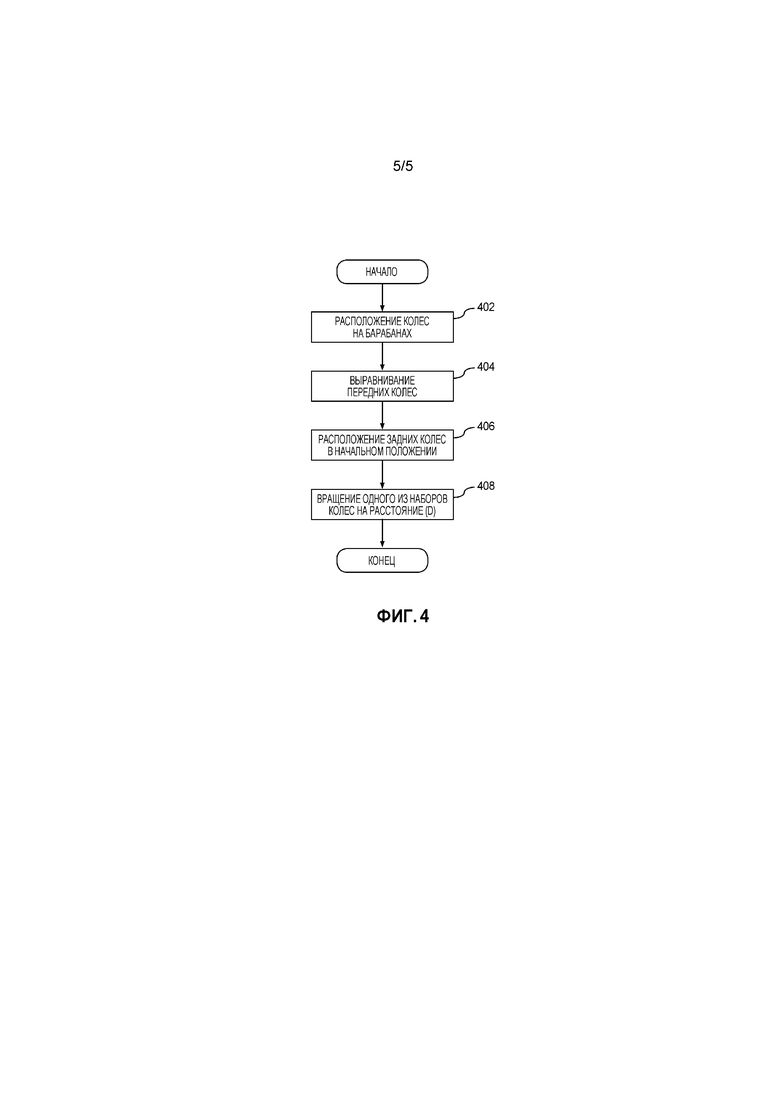
[0026] Фиг. 4 представляет собой другую схему последовательности операций, изображающую примерный способ расположения перезаряжаемых датчиков 108a, 108b, 108c и 108d TPMS, который может быть осуществлен электронными компонентами 200 на Фиг. 2. Схема последовательности операций на Фиг. 4 изображает способ, когда платформа 114 для выравнивания включает в себя четыре барабана 102a, 102b, 102c и 102d. Первоначально транспортное средство 100 располагают так, что каждое из колес 104a, 104b, 104c и 104d находится на разном из барабанов 102a, 102b, 102c и 102d (блок 402). Устройство 118 для выравнивания колес вращает передние колеса 104a и 104b так, что передние датчики 108a и 108b TPMS оказываются в нижней части передних колес 104a и 104b (блок 404). Устройство 118 для выравнивания колес вращает задние колеса 104c и 104d так, что задние датчики 108c и 108d TPMS оказываются в нижней части задних колес 104c и 104d (блок 406).
[0027] Устройство 118 для выравнивания колес вращает один из наборов колес (например, передние колеса 104a и 104b или задние колеса 104c и 104d) для имитации прохождения расстояния (D) между центром передних колес 104a и 104b и центром задних колес 104c и 104d (блок 408). Величина (например, в градусах, в радианах и т.д.), на которую устройство 118 для выравнивания колес вращает набор колес, основана на окружности колес 104a, 104b, 104c и 104d и расстоянии (D). Например, если окружность колес 104a, 104b, 104c и 104d (с шинами) составляет 7,2 фута (2,19456 м), и расстояние (D) составляет 8,5 фута (2,5908 м), устройство 118 для выравнивания колес вращает набор колес на 65 градусов (1,13 радиан) (((8,5/7,2)%1)*360 градусов). Когда набор колес представляет собой передние колеса 104a и 104b, устройство 118 для выравнивания колес вращает передние колеса 104a и 104b по часовой стрелке. Когда набор колес представляет собой задние колеса 104с и 104d, устройство 118 для выравнивания колес вращает задние колеса 104c и 104d против часовой стрелки. Способ на Фиг. 4 затем заканчивается.
[0028] Схемы последовательности операций на Фиг. 3 и 4 характерны для машиночитаемых инструкций, которые содержат одну или более программ, которые при исполнении процессором (таким как процессор 204 на Фиг. 2), осуществляют устройство 118 для выравнивания колес на Фиг. 1A и 2. Дополнительно, хотя примерные программы описаны со ссылкой на схему последовательности операций, проиллюстрированную на Фиг. 3 и 4, многие другие способы осуществления примерного устройства 118 для выравнивания колес могут быть альтернативно использованы. Например, порядок исполнения блоков может быть изменен и/или некоторые из описанных блоков могут быть изменены, исключены или объединены.
[0029] В этой заявке использование разделительного союза предназначено для включения соединительного союза. Дополнительно, союз «или» может быть использован для выражения признаков, которые присутствуют одновременно, а не взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать включающим в себя «и/или». Термины «включает в себя», «включающий в себя» и «включать в себя» являются инклюзивными и имеют такой же объем, что и «содержит», «содержащий» и «содержать» соответственно.
[0030] Вышеописанные варианты выполнения и особенно любые «предпочтительные» варианты выполнения представляют собой возможные примеры вариантов осуществления и изложены всего лишь для ясного понимания принципов изобретения. Могут быть выполнены многие изменения и преобразования вышеописанного варианта (вариантов) выполнения без существенного отклонения от замысла и принципов технологий, описанных здесь. Все преобразования предназначены для включения здесь в объем этого раскрытия и для защиты следующей формулой изобретения.


Изобретение относится к транспортным средствам. Способ включает в себя расположение передних колес на первом и втором барабанах. Способ также включает в себя выравнивание, с помощью первого и второго барабанов, датчиков контроля давления в шинах передних колес. Способ включает в себя также расположение задних колес на первом и втором барабанах. Дополнительно, способ включает в себя выравнивание, с помощью первого и второго барабанов, датчиков контроля давления в шинах задних колес. Технический результат – повышение эффективности использования датчиков контроля давления в шинах. 4 н. и 12 з.п. ф-лы, 5 ил.
1. Способ выравнивания датчиков контроля давления в шинах на транспортном средстве, причем способ содержит этапы, на которых:
располагают передние колеса на первом и втором барабанах;
вращают первое из передних колес до тех пор, пока соответствующий первый из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка первого из датчиков контроля давления в шинах параллельна земле;
вращают второе из передних колес до тех пор, пока соответствующий второй из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка второго из датчиков контроля давления в шинах параллельна земле;
располагают задние колеса на первом и втором барабанах; и
выравнивают, с помощью первого и второго барабанов, датчики контроля давления в шинах задних колес.
2. Способ по п. 1, включающий в себя этапы, на которых:
обнаруживают, с помощью детектора выравнивания, когда первый из датчиков контроля давления в шинах расположен так, что вторичная обмотка первого из датчиков контроля давления в шинах параллельна земле; и
обнаруживают, с помощью детектора выравнивания, когда второй из датчиков контроля давления в шинах расположен так, что вторичная обмотка второго из датчиков контроля давления в шинах параллельна земле.
3. Способ по п. 2, в котором обнаружение первого и второго из датчиков контроля давления в шинах включает в себя обнаружение, когда вторичная обмотка соответствующего из датчиков контроля давления в шинах индуктивно связана с первичной обмоткой детектора выравнивания.
4. Способ по п. 2, в котором обнаружение первого и второго из датчиков контроля давления в шинах включает в себя обнаружение сообщений от соответствующего из датчиков контроля давления в шинах с помощью приемопередатчика детектора выравнивания.
5. Способ по п. 1, в котором выравнивание датчиков контроля давления в шинах задних колес включает в себя:
вращение первого из задних колес до тех пор, пока соответствующий третий из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка третьего из датчиков контроля давления в шинах параллельна земле; и
вращение второго из задних колес до тех пор, пока соответствующий четвертый из датчиков контроля давления в шинах не будет расположен так, что вторичная обмотка четвертого из датчиков контроля давления в шинах параллельна земле.
6. Способ выравнивания датчиков контроля давления в шинах на транспортном средстве, содержащий этапы, на которых:
располагают передние колеса транспортного средства на первом и втором барабанах;
располагают задние колеса транспортного средства на третьем и четвертом барабанах;
независимо вращают первый и второй барабаны для расположения передних датчиков системы контроля давления в шинах передних колес;
определяют положение выравнивания для задних датчиков системы контроля давления в шинах;
независимо вращают второй и третий барабаны для расположения задних датчиков системы контроля давления в шинах задних колес так, что вторичные обмотки задних датчиков системы контроля давления в шинах параллельны земле; и
последовательно независимо вращают третий и четвертый барабаны для расположения задних колес в положении выравнивания.
7. Способ по п. 6, в котором независимое вращение первого и второго барабанов для расположения первых датчиков системы контроля давления в шинах передних колес включает в себя:
вращение первого из передних колес с помощью первого барабана до тех пор, пока соответствующий первый из датчиков системы контроля давления в шинах не будет расположен так, что вторичная обмотка первого из датчиков контроля давления в шинах параллельна земле; и
вращение второго из передних колес с помощью второго барабана до тех пор, пока соответствующий второй из датчиков системы контроля давления в шинах не будет расположен так, что вторичная обмотка второго из датчиков контроля давления в шинах параллельна земле.
8. Способ по п. 6, включающий в себя обнаружение, когда вторичная обмотка соответствующего из передних датчиков системы контроля давления в шинах индуктивно связана с первичной обмоткой детектора выравнивания.
9. Способ по п. 6, включающий в себя обнаружение передних датчиков системы контроля давления в шинах с помощью приемопередатчика детекторов выравнивания, расположенных вблизи передних колес.
10. Способ по п. 6, в котором положение выравнивания основано на расстоянии между первым центром передних шин и вторым центром задних шин и окружности задних шин.
11. Система выравнивания датчиков контроля давления в шинах на транспортном средстве, содержащая:
первый набор барабанов, выполненный с возможностью приема первого набора колес;
второй набор барабанов, выполненный с возможностью приема второго набора колес,
множество детекторов выравнивания; и
устройство для выравнивания колес, связанное с возможностью осуществления связи с первым и вторым наборами барабанов и множеством детекторов выравнивания, причем устройство для выравнивания колес выполнено с возможностью:
независимого вращения первого набора барабанов для выравнивания первого набора датчиков системы контроля давления в шинах, соответствующего первому набору колес;
определения положения выравнивания для второго набора датчиков системы контроля давления в шинах, соответствующего второму набору колес;
независимого вращения второго набора колес для расположения второго набора датчиков системы контроля давления в шинах задних колес так, что вторичные обмотки второго набора датчиков системы контроля давления в шинах параллельны земле; и
последовательного независимого вращения второго набора барабанов для расположения второго набора колес в положении выравнивания.
12. Система по п. 11, в которой один из множества детекторов выравнивания находится вблизи каждого барабана в первом и втором наборах барабанов.
13. Система по п. 11, в которой множество детекторов выравнивания выполнены с возможностью обнаружения, когда соответствующий из соответствующих датчиков системы контроля давления в шинах расположен в нижней части соответствующего из ободьев колес одного из наборов колес.
14. Система по п. 11, в которой каждый из множества детекторов выравнивания включает в себя первичную обмотку для обнаружения, когда вторичная обмотка соответствующего из датчиков системы контроля давления в шинах индуктивно связана с первичной обмоткой детектора выравнивания.
15. Система по п. 11, в которой каждый из множества детекторов выравнивания включает в себя приемопередатчик для обнаружения сообщений от соответствующего из датчиков системы контроля давления в шинах.
16. Способ выравнивания датчиков контроля давления в шинах на транспортном средстве, содержащий этапы, на которых:
для передних колес транспортного средства:
(а) располагают левое и правое колеса на первом и втором барабанах соответственно;
(б) независимо вращают левое колесо до тех пор, пока вторичная обмотка левого датчика давления в шине не будет параллельна земле;
(в) независимо вращают правое колесо до тех пор, пока вторичная обмотка правого датчика давления в шине не будет параллельна земле; и
повторяют этапы (а)-(в) для задних колес.
| US4442708 A, 17.04.1984 | |||
| US6457351 B1, 01.10.2002 | |||
| US7415771 B2, 26.08.2008 | |||
| CN101420134 A, 29.04.2009. |

