ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к технике электрической связи, а именно к области управления лазерными световыми пучками, и может быть использовано в системах квантовой криптографии через свободное пространство и для связи между несколькими между несколькими летательными аппаратами (ЛА) и/или ЛА и наземными станциями.
Настоящее техническое решение относится к области управления лазерными и световыми пучками путем их отклонения и фокусировки с помощью пространственного модулятора света (SLM). SLM - это двумерный массив пикселей, состоящий из жидких кристаллов и электродов под ними. Массив пикселей может располагаться как на отражающей поверхности, так и на прозрачной. На SLM формируется фазовый профиль (паттерн), при дифракции на котором свет отклоняется на определенный угол и/или фокусируется. Путем изменения напряжения на электродах можно изменять фазу (оптический путь) волны, отраженной от SLM в области массива пикселей. Таким образом, SLM является фазовым модулятором, у которого фазовый профиль (паттерн) может быть изменен программным образом в режиме реального времени. SLM неподвижен в пространстве, не требует механической системы ориентации, поэтому системы управления пучками на основе SLM компактны, надежны, имеют малый вес и удобны для установки, например, на беспилотных летательных аппаратах.
УРОВЕНЬ ТЕХНИКИ
В настоящее время известен ряд патентов: [1, 2, 3, 4], а также обзорных статей [5, 6] по SLM и устройствам управления лазерными и световыми пучками с помощью SLM. В прототипе данной заявки [1] на SLM формируется паттерн, при дифракции на котором свет отклоняется на определенный угол либо фокусируется. В различных конфигурациях прототип может осуществлять изменение направления пучка (поля зрения), изменение угла обзора, фокусировку, причем имеется возможность изменять направление фокусировки между несколькими объектами или направлениями с большой частотой, осуществляя слежение за ними в реальном времени (мультиплексирование). Наведение и удержание пучков осуществляется общими методами, изложенными в патентах [3, 4].
Недостатком прототипа [1] является то, что для контроля лазерных лучей в задачах оптической связи происходит деление времени коммуникации между каналами, снижая эффективную скорость передачи больше, чем в n раз, где n - количество каналов. Потери скорости связи возникают из-за конечного времени переключения между каналами.
Главная цель устройства управления пучками с помощью SLM, предлагаемого в данной заявке - устранение этого недостатка и одновременное управление одновременно несколькими лучами с помощью SLM без потерь времени на переключения между каналами.
В устройстве [2] SLM осуществляет функцию корректировки аберраций. Недостатком устройства [2] является корректировка аберраций только в одном канале, в то время как в нашем устройстве корректировка аберраций может осуществляться одновременно во всех каналах.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Техническая проблема заявленного изобретения заключается в создании системы, позволяющей осуществлять одновременное управление несколькими лазерными лучами с помощью SLM без потерь времени на переключения между каналами и корректировку аббераций одновременно во всех каналах с достижением технического результата, заключающегося в сокращении времени передачи информации.
Указанный технический результат достигается в системе для одновременного управления по меньшей мере двумя лазерными лучами с помощью неподвижной жидкокристаллической матрицы, содержащей жидкокристаллическую матрицу SLM, лазеры, фотодиоды, уголковые отражатели, волоконно-оптические кабели, два приемо-передающих узла, оптически сопряженных между собой, каждый из упомянутых узлов содержит наклонно-поворотную механическую платформу, выполненную с возможностью взаимной ориентации упомянутых узлов между собой, при этом на каждой из упомянутых наклонно-поворотных платформ размещены упомянутые жидкокристаллическая матрица SLM, с закрепленными на ней фотодиодами, уголковый отражатель, приемо-передающее устройство, связанное посредством волоконно-оптических кабелей с по меньшей мере двумя коллиматорами, блок управления; поверхность жидкокристаллической матрицы SLM разделена по меньшей мере на две области, отведенные для приемного и передающего каналов, при этом жидкокристаллическая матрица SLM выполнена с возможностью одновременной фокусировки и/или изменения направления в реальном времени, по меньшей мере, двух лазерных лучей, формируемых посредством лазера приемо-передающего устройства и независимого одновременного контроля указанных областей поверхностей SLM за счет изменения подаваемого на них напряжения, управляемого посредством блока управления.
Дополнительной особенностью является то, что лазерные лучи фокусируют под углом 0,3 радиан относительно угла падения.
Дополнительной особенностью является то, что фокусные расстояния, соответствующие паттернам различных лучей, отличаются в 2 раза.
Дополнительной особенностью является то, что область изменения ориентации механической платформы составляет 2π стерадиан.
Дополнительной особенностью является то, что наведение по координатам приемо-передающих узлов осуществляют от спутниковых систем навигации GPS/ГЛОНАСС.
Дополнительной особенностью является то, что приемо-передающие устройства выполнены с возможностью работы в квантовом режиме, где уровень передающего сигнала снижается до уровня одиночных фотонов, а в приемной части устройств используют детекторы одиночных фотонов.
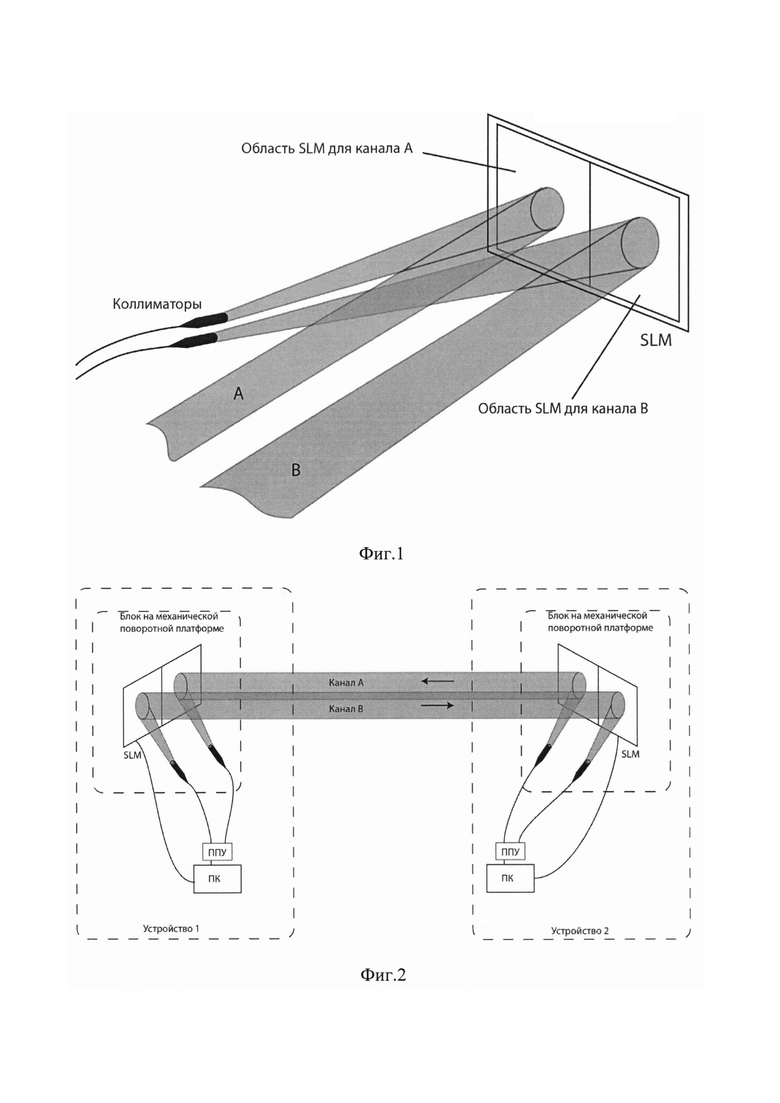
В предлагаемом устройстве разделение каналов (мультиплексирование) достигается путем деления поверхности SLM на несколько различных частей, как изображено на Рис. 1, при этом каждая часть способна осуществлять все функции прототипа [1] независимо от других частей в реальном времени одновременно для всех каналов, без необходимости переключения между каналами.
SLM может так же осуществлять функцию корректировки аберраций одновременно для каждого из каналов, аналогично тому как это сделано только для одного из каналов в патенте США [2]
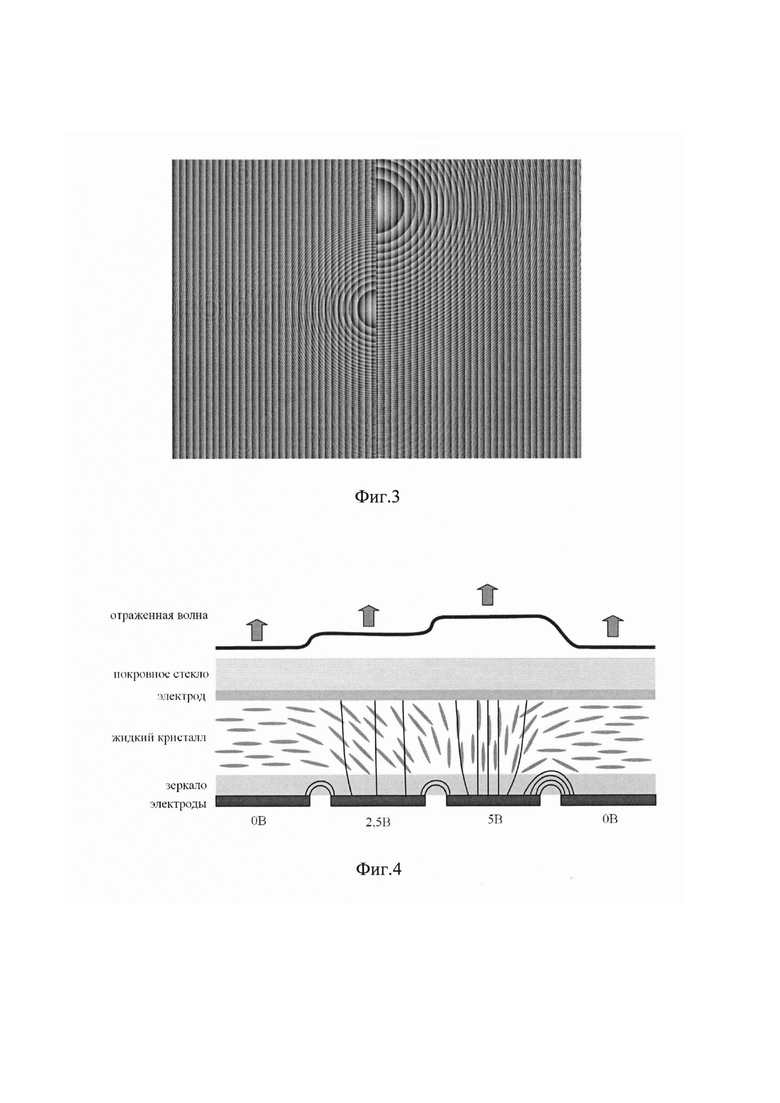
Устройство может быть использовано для контроля пучков в оптических системах беспроводной связи. В частности, но не ограничиваясь, с помощью SLM можно организовать мультиплексирование каналов приема и передачи так, как указано на фиг. 2.
Оптическая система связи состоит из двух идентичных узлов приемо-передачи, называемых Устройством 1 и Устройством 2, находящихся у двух абонентов связи. В каждом из Устройств имеются приемник и передатчик, имеющие волоконный вход/выход, оснащенные с по меньшей мере двумя коллиматорами. Излучение передатчика из коллиматора направляется на одну из областей SLM, а излучение для приемника направляется в коллиматор детектора от другой области SLM. Как пример, в реализованной системе имеются два приемопередатчика, по одному для каждого из абонентов. Передатчик одного из абонентов оптически сопряжен с приемником другого абонента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сущность предлагаемого технического решения, заключающаяся в описании признаков, технических элементов и его преимуществ, поясняется на примерах конкретных, но не ограничивающих заявляемые технические решения вариантах выполнения со ссылками на сопровождающие чертежи, которые не обязательно начерчены в масштабе, и на которых:
Фиг. 1 показывает деление поверхности SLM на области, соответствующие различным каналам. Фазовые профили (паттерны), соответствующие этим областям, устанавливаются независимо, что дает возможность управлять одновременно несколькими световыми пучками, падающими каждый на соответствующую группу ячеек SLM.
фиг. 2 показывает общую схему интеграции модулей и блоков Устройств 1 и 2 между которыми осуществляется оптическая связь с управлением одновременно двумя пучками (приемным и передающим) с помощью SLM.
фиг. 3 показывает пример паттерна SLM. Видны две независимые области SLM, каждая из которых соответствует своему пучку. В реализованной системе пучки фокусируются под углом 0,3 радиан относительно угла падения. Фокусные расстояния, соответствующие паттернам различных пучков, отличаются в 2 раза.
Фиг. 4 - принципиальная схема жидкокристаллической матрицы SLM.
РЕАЛИЗАЦИЯ ИЗОБРЕТЕНИЯ
Изобретение может быть реализовано в системе оптической связи, общая схема которой показана на фиг. 2. Система состоит из двух идентичных приемопередающих узлов (Устройство 1 и Устройство 2), между которыми осуществляется оптическая связь через свободное пространство с управлением одновременно двумя пучками (Канал А и канал В) с помощью SLM. Каждое устройство состоит из подвижной наклонно-поворотной механической платформы, SLM, приемо-передающего устройства (ППУ), имеющего волоконный вход и выход и оснащенного по меньшей мере двумя коллиматорами, а так же блока управления.
Подвижная наклонно-поворотная механическая платформа осуществляет наведение на приемо-передающий узел сопряженного абонента. Область изменения ориентации механической платформы составляет 2π стерадиан. Наведение осуществляется по координатам узлов, которые получаются от спутниковых систем навигации GPS/ГЛОНАСС. На SLM закреплены фотодиоды для обратной связи системы наведения. Угол падения излучения на SLM, составляет 10 градусов. Для обратной связи системы наведения использованы фотодиоды Centronic OSD15-5T с максимумом спектральной чувствительности в районе 800-900 нм, что соответствует длинам волн лазеров. Излучение, передаваемое от Устройств 1, попадает на уголковый отражатель Устройства 2 и регистрируется фотодиодами.
Жидкие кристаллы матрицы SLM помещены между двумя электродами, один из которых сплошной, а другой разделен на ячейки (фиг. 4). Зеркало служит для отражения падающего сигнала. Покровное стекло необходимо для защиты. В каждой ячейке задается свое напряжение, что приводит к повороту кристаллов, а значит изменению показателя преломления. Группы ячеек контролируются независимо подаваемым напряжением, что дает возможность управлять одновременно несколькими световыми пучками, падающими каждый на соответствующую область ячеек SLM. Площадь поверхности SLM поделена на две области, отведенные для приемного и передающего каналов. Излучение лазера, отраженное от соответствующей области SLM, попадает в коллиматор приемного устройства, а излучение лазера, вышедшее из коллиматора передающего устройства, отражается от SLM и распространяется в сторону устройства сопряженного абонента. ППУ соединено с блоком управления, осуществляющим кодирование/декодирование информации, управление ППУ, расчет паттернов и управление SLM. SLM осуществляет точное наведение и фокусировку, используя в качестве обратной связи среднюю оптическую мощность сигнала, регистрируемую приемным устройством.
Приемный канал Устройства 1 оптически сопряжен с передающим каналом Устройства 2, а передающий канал устройства 1 оптически сопряжен с приемным каналом устройства 2.
Приемный и передающий модули могут работать в квантовом режиме. Для этого уровень сигнала передающего устройства снижается до уровня одиночных фотонов, а в приемном устройстве используется детектор одиночных фотонов. Лазер, необходимый для формирования квантового оптического канала, также служит лазером наведения при работе на большой мощности. После наведения на Устройство 2, лазер переключается в режим малой мощности, а на Устройстве 2 запускается принимающая аппаратура квантового канала.
В областях матрицы SLM, соответствующих приемнику и передатчику каждого из абонентов, генерируются паттерны, соответствующие плоской линзе произвольного фокусного расстояния, расположенной произвольно к оси пучка. С помощью сформированных линз, заменяющих подвижные линзы, на SLM происходит независимое изменение направления и фокусировка пучков, соответствующих приемнику и передатчику; производится настройка, фокусировка одновременно нескольких световых пучков без изменения относительного положения механических элементов оптической системы.
Управление количеством каналов, большим 2 и дальнейшее разбиение SLM на большее количество областей осуществляется полностью аналогично управлению двумя пучками.
Путем подачи на SLM паттерна специального вида, методами, аналогичными [2], осуществляется корректировка аберраций, вызванных, например, прохождением пучков через турбулентную атмосферу.
ИСПОЛЬЗОВАННЫЕ МАТЕРИАЛЫ
[1] Патент США US 7,283,291 В2 High speed beam steering/field of view adjustment
[2] Патент US 9,917,989 B2
[3] Патент Японии №25122, 1969 г.
[4] Патент RU 2328077
[5] Mane-Si Laure Lee, Brigitte Loiseaux, Daniel Dolfi, Sylvie Tonda & Jean-Pierre Huignard "Review of Information Display Vol. 3(3), p 24-29 (2002)
[6] Uzi Efron «Spatial of liquid crystal spatial light modulators at Thales research & technology: Technology and applications" Journal Light Modulators: Technology and Applications)) Proceedings of SPIE (2001)
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГОВОРНОЕ УСТРОЙСТВО НА БАЗЕ ТВЁРДОТЕЛЬНОГО ЛАЗЕРА С НАКАЧКОЙ ЛАЗЕРНЫМ ДИОДОМ | 2016 |
|
RU2668359C1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| ПЕРЕГОВОРНОЕ УСТРОЙСТВО НА БАЗЕ ЛАЗЕРНОГО ДИОДА | 2016 |
|
RU2637178C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2793613C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2785768C1 |
| УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2005 |
|
RU2301496C1 |
| Способ и система передачи медиаинформации с беспилотных воздушных средств на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока | 2019 |
|
RU2703797C1 |
| Оптическая система формирования и наведения лазерного излучения | 2016 |
|
RU2663121C1 |
| СПОСОБ И СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ ПО ОПТИЧЕСКОМУ КАНАЛУ МЕЖДУ ПРИЕМНИКОМ И ПЕРЕДАТЧИКОМ С ПОМОЩЬЮ ИЗЛУЧЕНИЯ ЛАЗЕРА-МАЯКА | 2021 |
|
RU2770565C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ПОЛЯ МИКРООБЪЕКТОВ С ЛУЧЕВЫМ ВОЗДЕЙСТВИЕМ (ВАРИАНТЫ) | 2002 |
|
RU2199729C1 |
Изобретение относится к технике электрической связи, а именно к области управления лазерными световыми пучками, и может быть использовано в системах квантовой криптографии через свободное пространство и для связи между несколькими летательными аппаратами (ЛА) и/или ЛА и наземными станциями. Технический результат состоит в создании системы, позволяющей осуществлять одновременное управление несколькими лазерными лучами с помощью SLM без потерь времени на переключения между каналами и корректировку аббераций одновременно во всех каналах с достижением технического результата, заключающегося в сокращении времени передачи информации. Для этого в системе для одновременного управления несколькими лазерными лучами с помощью неподвижной жидкокристаллической матрицы, содержащей жидкокристаллическую матрицу SLM, лазеры, фотодиоды, уголковые отражатели, волоконно-оптические кабели, крепежные элементы, а также содержит два приемопередающих узла, оптически сопряженных между собой, каждый из упомянутых узлов содержит наклонно-поворотную механическую платформу, выполненную с возможностью взаимной ориентации упомянутых узлов между собой, при этом на каждой из упомянутых наклонно-поворотных платформ размещены упомянутые жидкокристаллическая матрица (SLM) с закрепленными на ней фотодиодами, уголковый отражатель, приемопередающее устройство, связанное посредством волоконно-оптических кабелей с по меньшей мере двумя коллиматорами, а также компьютером; поверхность жидкокристаллической матрицы (SLM) разделена как минимум на две области, отведенные для приемного и передающего каналов, при этом жидкокристаллическая матрица SLM выполнена с возможностью одновременной фокусировки и/или изменения направления в реальном времени по меньшей мере двух лазерных лучей, формируемых посредством лазера приемо-передающего устройства, и независимого одновременного контроля указанных областей поверхностей SLM за счет изменения подаваемого на них напряжения, управляемого блоком управления. 5 з.п. ф-лы, 4 ил.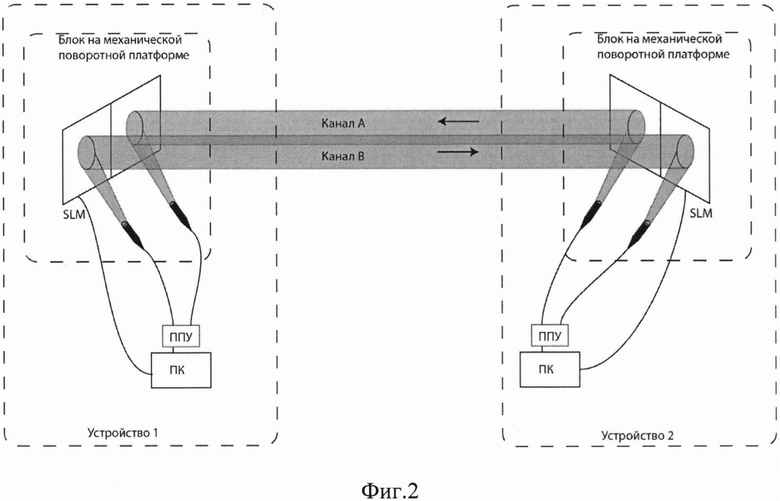
1. Система для одновременного управления по меньшей мере с двумя лазерными лучами с помощью неподвижной жидкокристаллической матрицы, содержащая два идентичных приемо-передающих узла с лазером и фотодиодом, между которыми осуществляется оптическая связь через свободное пространство, каждый приемо-передающий узел содержит наклонно-поворотную платформу (ППУ), управляемую блоком управления, на которой размещена жидкокристаллическая матрица (SLM), отличающаяся тем, что каждое приемо-передающее устройство соединено посредством волоконно-оптических кабелей с по меньшей мере двумя коллиматорами, а блок управления осуществляет управление ППУ, расчет паттернов и управление SLM таким образом, что происходит независимое изменение направления и фокусировка пучков соответствующих приемнику и передатчику, при этом жидкокристаллическая матрица содержит массив пикселей, состоящий из жидких кристаллов, помещенных между двумя электродами и размещенных на поверхности указанной матрицы; указанная поверхность матрицы разделена по меньшей мере на две области, отведенные для приемного и передающего каналов; один из указанных электродов выполнен сплошным, а другой разделен на ячейки, выполненные с возможностью одновременного управления световыми пучками посредством независимо подаваемого напряжения, при этом на электроде, разделенном на ячейки, расположено зеркало, служащее для отражения падающего сигнала, а на сплошном электроде расположено покровное зеркало для защиты.
2. Система по п. 1, отличающаяся тем, что лазерные лучи фокусируют под углом 0,3 радиан относительно угла падения.
3. Система по п. 1, отличающаяся тем, что фокусные расстояния, соответствующие паттернам различных лучей, отличаются в 2 раза.
4. Система по п. 1, отличающаяся тем, что область изменения ориентации наклонно-поворотной механической платформы составляет 2π стерадиан.
5. Система по п. 1, отличающаяся тем, что наведение по координатам приемо-передающих узлов осуществляют от спутниковых систем навигации GPS/ГЛОНАСС.
6. Система по п. 1, отличающаяся тем, что приемные и передающие устройства выполнены с возможностью работы в квантовом режиме, где уровень передающего сигнала снижается до уровня одиночных фотонов, а в приемной части устройств используют детекторы одиночных фотонов.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| УСТРОЙСТВО ДВУХСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 2006 |
|
RU2328077C1 |
| УСТРОЙСТВО ДВУСТОРОННЕЙ ОПТИЧЕСКОЙ СВЯЗИ | 2004 |
|
RU2272358C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

