Изобретение относится к системам передачи цифровой информации по слабонаправленному оптическому лазерному каналу связи с беспилотного воздушного средства (БВС) или малого космического аппарата (МКА) на пункт сбора данных, построенного с использованием технологии квантового приема оптической информации, т.е. приема оптической информации, закодированной в световых импульсах с энергией на уровне одиночных фотонов (quantum-limited optical communication, QLOC) и обрабатываемой проприетарными алгоритмами квантового приема информации и может быть использовано для трансляции многокомпонентного медиапотока и передачи сенсорной информации с (БВС/МКА) на землю, на пункт сбора данных, в т.ч. на другие БВС/МКА (в дальнейшем "Летательный аппарат" (ЛА)), на движущиеся (поезд, автомобиль, самолет и т.д.) объекты; для организации ретрансляции сигналов спутникового или радио-потокового вещания, в частности, в зонах его глушения; создания подвижного ретранслятора для этапа «последней мили» сети Интернет; для сбора данных с роя малогабаритных БВС/МКА
Из уровня техники известны системы трансляции медиаинформации с ЛА:
• Радиосистемы трансляции медиаинформации с БВС (FPV системы): аналоговые (0.43, 0.9, 1.2, 2.4, 5.8 ГГц) и цифровые (WiFi 2.4 ГГц).
• Аналоговые системы подвержены помехам со стороны как самого ЛА (двигатели, радиоканалы управления, проводка и т.д.), так и со стороны среды.
• WiFi системы ограничены по дальности и подвержены интерференции с другими WiFi передатчиками.
• FPV система создает значительные радиопомехи в полном телесном угле.
• Ненаправленные антенны «диссипируют» значительную мощность, уменьшая эффективную дистанцию связи
Во всех FPV радиосистемах электромагнитные помехи приводят к ухудшению качества (возникают ошибки) и уменьшению дистанции связи. Оптические системы устойчивы к электромагнитным помехам, но не подходят для данной задачи.
Разработкой систем беспроводной оптической связи занимаются более десятка фирм, например, Mostcom (Мостком), SCHOTT, Canon, LightPointe, FSONA, Wireless Excellence, Aoptix, PAV, Optelix Wireless, WirelessGuys Inc.
В числе основных рыночных тенденций - сегментирование рынка по областям применимости систем. В числе основных технологических тенденций - увеличение скорости передачи данных через мультиплексирование сигнала, уменьшение потребляемой устройствами энергии, создание адаптивных оптических систем для увеличения операторской доступности канала.
Из уровня техники известны системы передачи медиаинформации с беспилотных воздушных средств, в частности модель M1-MG компании АО «Мостком».
Однако все эти компании производят в основном системы, которые могут эффективно использоваться в режиме типа "точка-точка", т.е. для неподвижных приемника и передатчика, поскольку построены по симметричному принципу с использованием дуплексных каналов, т.е. имеются два идентичных устройства, между которыми устанавливается канал оптической связи либо радиосвязи, причем оба устройства активны и, как следствие, довольно громоздки не могут быть помещены на БВС/МКА.
Кроме того, они имеют принципиальное ограничение на угловую точность юстировки. Их угловая диаграмма направленности (УДЫ) не превышает 0,01 град. (Мостком M1-GE), что делает невозможным наведение на движущуюся цель. Масса таких систем также высока (15 кг для Мостком M1-GE). Существующие маломощные системы VLC, несмотря на широкую УДН, эффективны на сверхмалых расстояниях. У VLC системы RONJA с дальностью связи 1,4 км ширина УДН 0,1 град и электрическая мощность 20кВ, что также не подходит для мобильных приложений. Мощные VLC системы воздушного базирования опасны как для людей, так и для животных.
Из уровня техники известны оптические системы передачи медиаинформации с беспилотных воздушных средств, в частности прототипы разработки Exelis & FALCON (USAF contract) и Aoptix & John Hopkins University Applied Physics Lab (DARPA Contract). На российском рынке единственная подобная система - модель M1-MG компании АО «Мостком», находящаяся на стадии проектирования. Разрабатываемые системы по своим массогабаритным характеристикам не приспособлены для установки на малогабаритные летательные аппараты.
В разрабатываемой конструкции приемное и передающее устройства принципиально разные, что позволяет изготовить их в компактном виде. Кроме того, в разрабатываемой системе используется расходящийся лазерный луч, который покрывает значительный участок поверхности на плоскости приемника, радикальным образом снижая требования к точности системе наведения. Еще одним отличительным признаком является прием информации в режиме счета фотонов.
Техническая проблема заявленного изобретения заключается в создании системы передачи медиаинформации с летательных аппаратов на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока.
Техническим результатом является создание системы передачи медиаинформации с летательных аппаратов на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока, не требующего критичности юстировки приемник-передатчик.
Указанный технический результат достигается в системе передачи медиаинформации с летательных аппаратов, в том числе с беспилотных воздушных средств, на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока, содержащая передатчик, установленный на летательном аппарате, в котором входной сигнал, содержащий потоковую видеоинформацию подается на вход шифратора, выход которого связан со входом кодера Рида-Соломона, далее передается на вход упаковщика Ethernet фреймов, выход которого связан со входом формирователя импульсов, с выхода которого оптические импульсы с помощью лазера, выполненного с возможностью формирования расходящегося луча, передаются на приемник, установленный на пункте сбора данных, выполненный с возможностью приема сигнала в малофотонном режиме, в котором попадают в высокочувствительный матричный детектор на основе SiPM, выход которого связан со входом процессора обработки сигнала, состоящего из последовательно соединенных анализатора кадров и блока селекции кадров; с выхода процессора обработки сигнала сигнал поступает в декодер, а именно последовательно на вход распаковщика Ethernet фреймов, декодер Рида-Соломона, дешифратор и далее в компьютер.
Также технический результат достигается за счет того, что приемник установлен на неподвижном объекте.
Также технический результат достигается за счет того, что приемник установлен на подвижном объекте.
Также технический результат достигается за счет того, что выполнена с возможностью наведения по обычной навигационной системе GPS/TTOHACC/Galileo/BeiDou.
Также технический результат достигается за счет того, что передатчик системы, устанавливаемый на летательном аппарате, имеет малый вес, не более 100 г, размеры не более 10×5×2 см и энергопотребление не более 5 Вт и выполнен с возможностью установки на любые летательные аппараты, с грузоподъемностью более 100 г.
Также технический результат достигается за счет того, что передатчик выполнен с возможностью снижения точности наведения на приемник в зависимости от расстояния, составляющего в среднем 12 град, а точность наведения приемного модуля на передающий модуль ~ 10 град.
Также технический результат достигается за счет того, что один приемник может обслуживать большое количество летательных аппаратов, последовательно переключаясь с одного летательного аппарата на другой.
Также технический результат достигается за счет того, что один приемник может обслуживать большое количество летательных аппаратов, используя несколько фоточувствительных матриц.
Также технический результат достигается за счет того, что в способе передачи медиаинформации с летательных аппаратов на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока, заключающийся в том, что при поступлении входного сигнала, содержащего потоковую видеоинформацию на передатчик, установленный на летательном аппарате, осуществляют шифрование сигнала, кодирование с помощью кода Рида-Соломона, осуществляющего коррекцию ошибок, упаковку Ethernet фреймов, формирование импульсов, передачу импульсов с помощью лазера на приемник, установленный на пункте сбора данных, где полученные импульсы, попадая на фоточувствительную поверхность многосекционной матрицы, формируют пятно в несколько миллиметров, после чего производится анализ последовательности кадров во времени и осуществляется сравнение с пороговым коэффициентом срабатывания системы для определения случайного шума, в случае превышения порогового коэффициента, осуществляется отбрасывание кадра со случайным шумом, далее происходит распаковывание Ethernet фреймов, декодирование кода Рида-Соломона и дешифровка, далее информация передается на компьютер или другое обрабатывающее либо накапливающее устройство.
Дополнительной особенностью является то, что в силу модульности системы, можно объединить приемник и передатчик для создания компактного приемо-передающего устройства и системы, обеспечивающей двустороннюю оптическую лазерную связь с квантовым приемом передаваемой информации
Заявленное изобретение поясняется чертежами Фиг. 1-10.
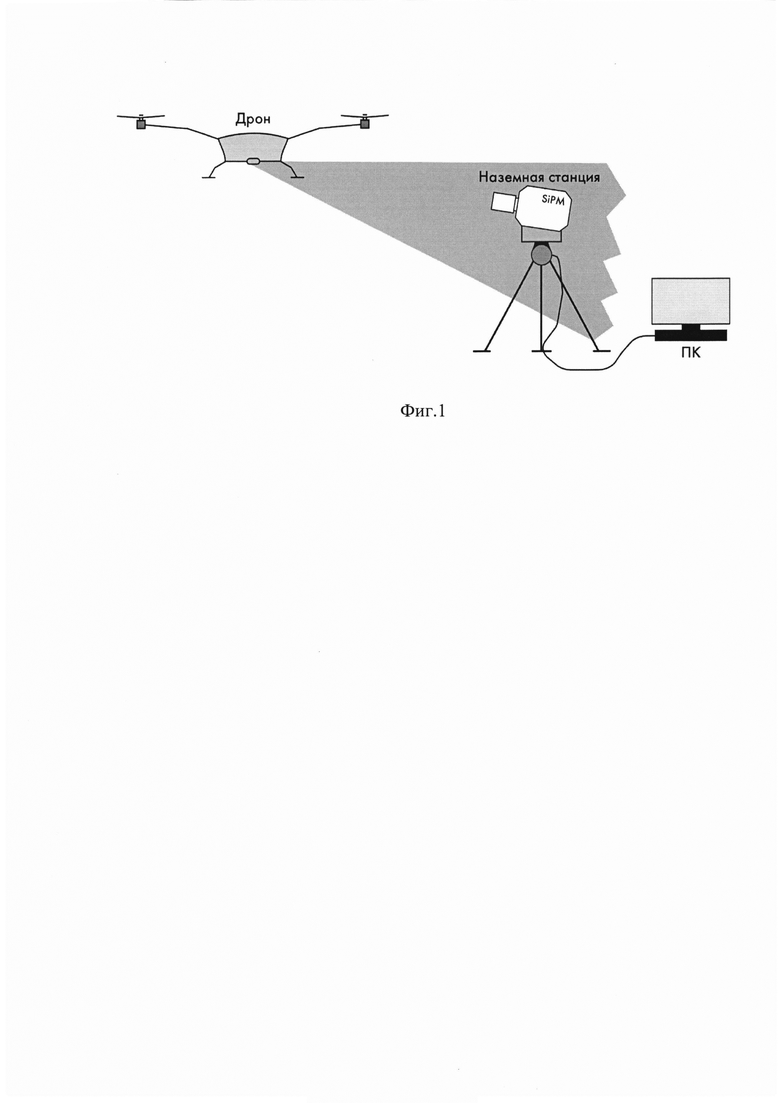
На фиг. 1 представлена общая схема системы передачи медиаинформации с беспилотных воздушных средств на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока, содержащая передатчик, установленный на ЛА, приемник, установленный на Земле, компьютер.
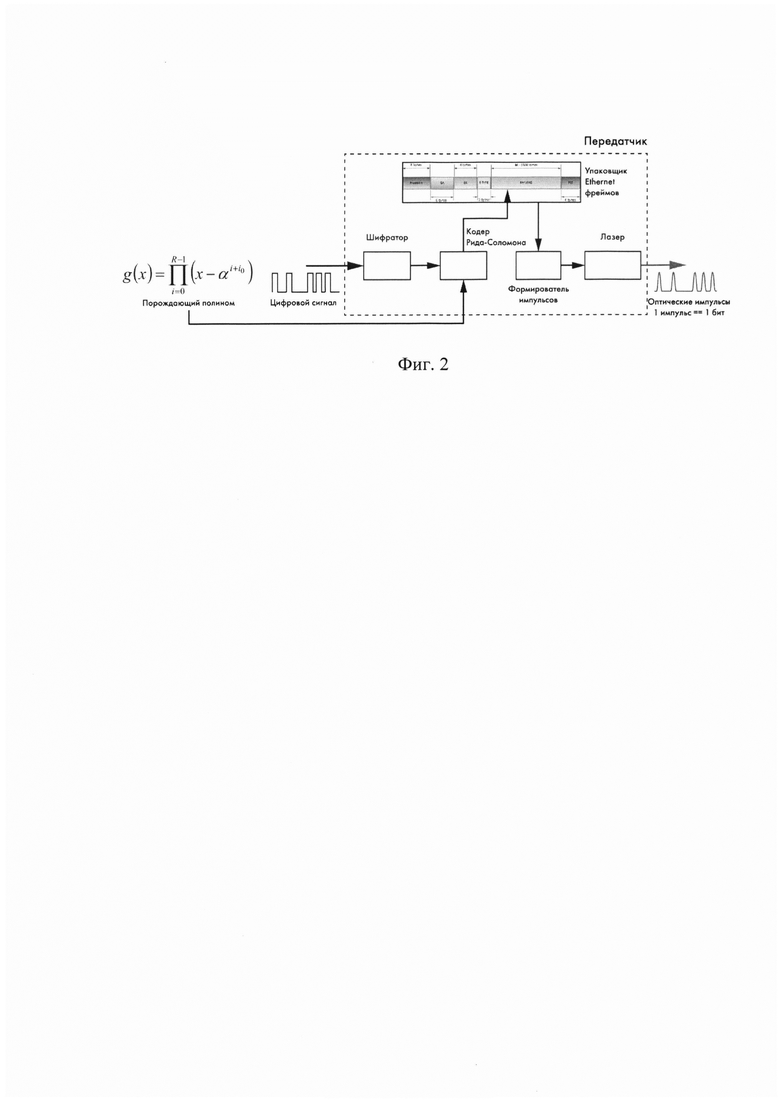
На фиг. 2 представлена блок-схема и принцип работы передатчика.
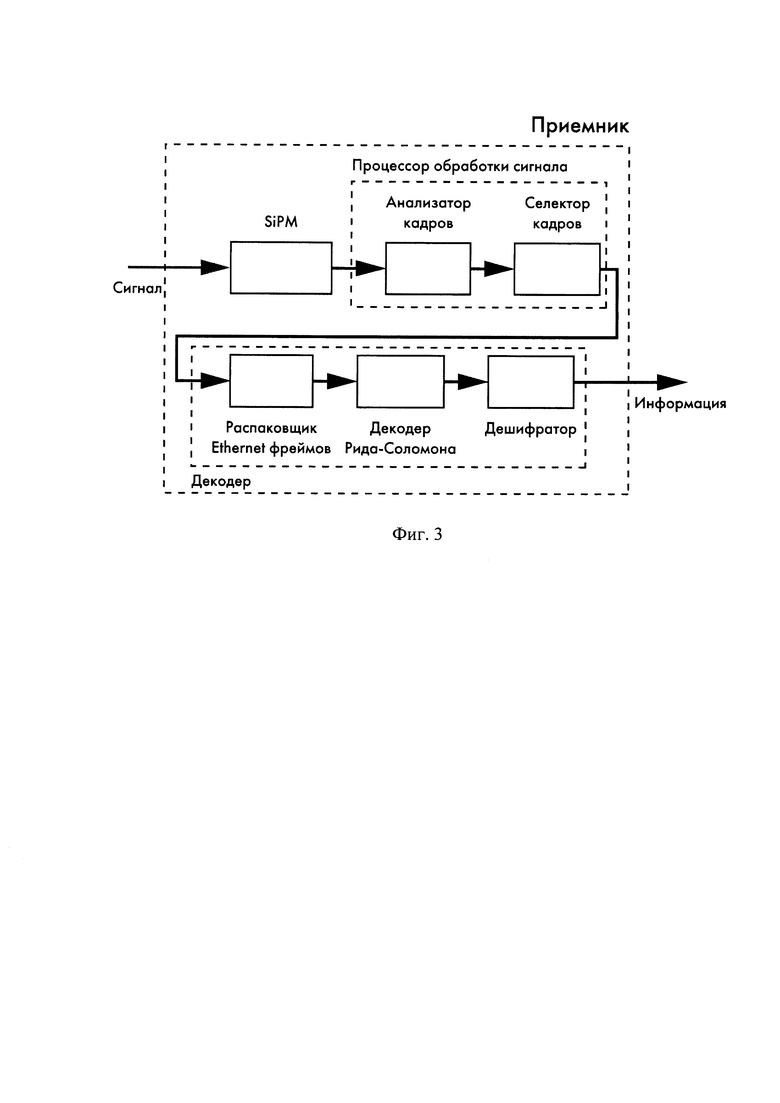
На фиг. 3 представлена блок-схема и принцип работы приемника.
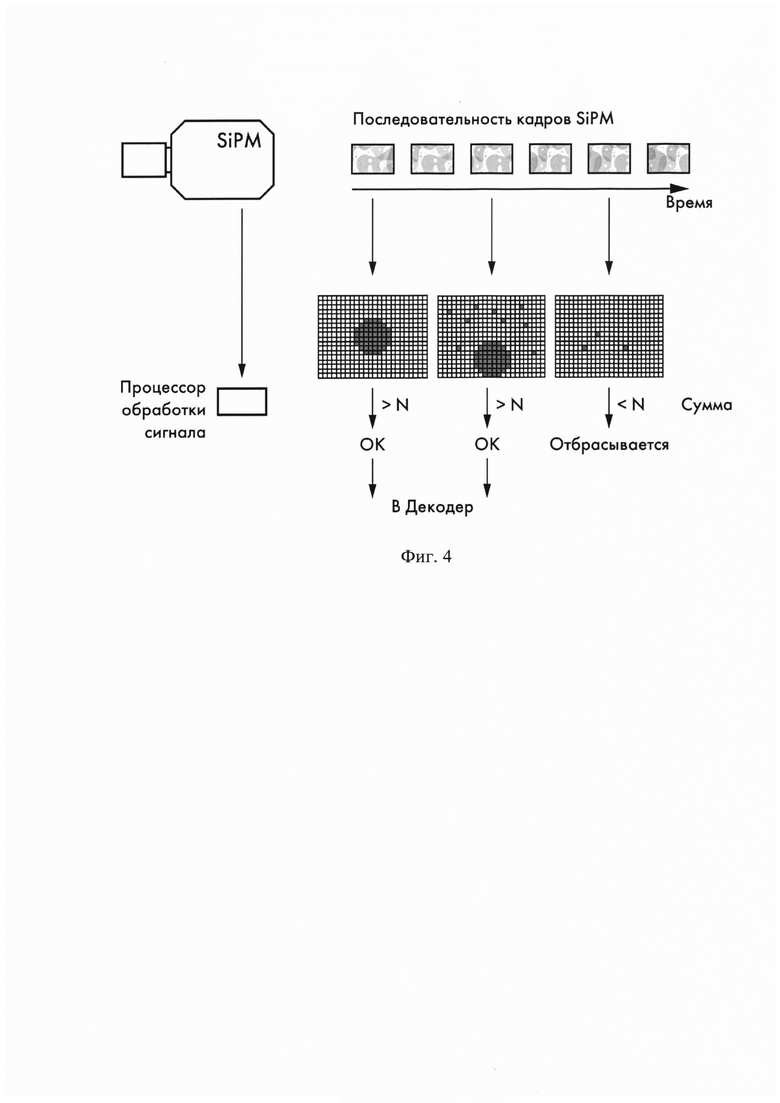
На фиг. 4 представлена временная диаграмма селекции кадров.
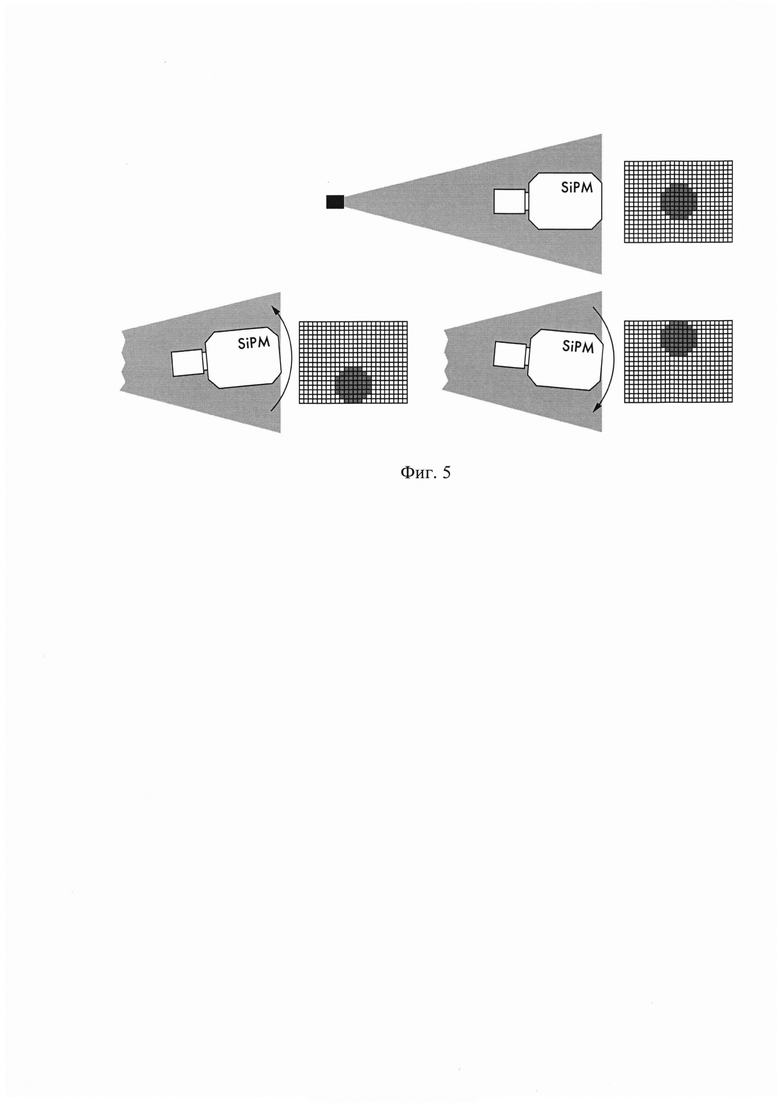
На фиг. 5 представлена технология квантового приема оптической информации.
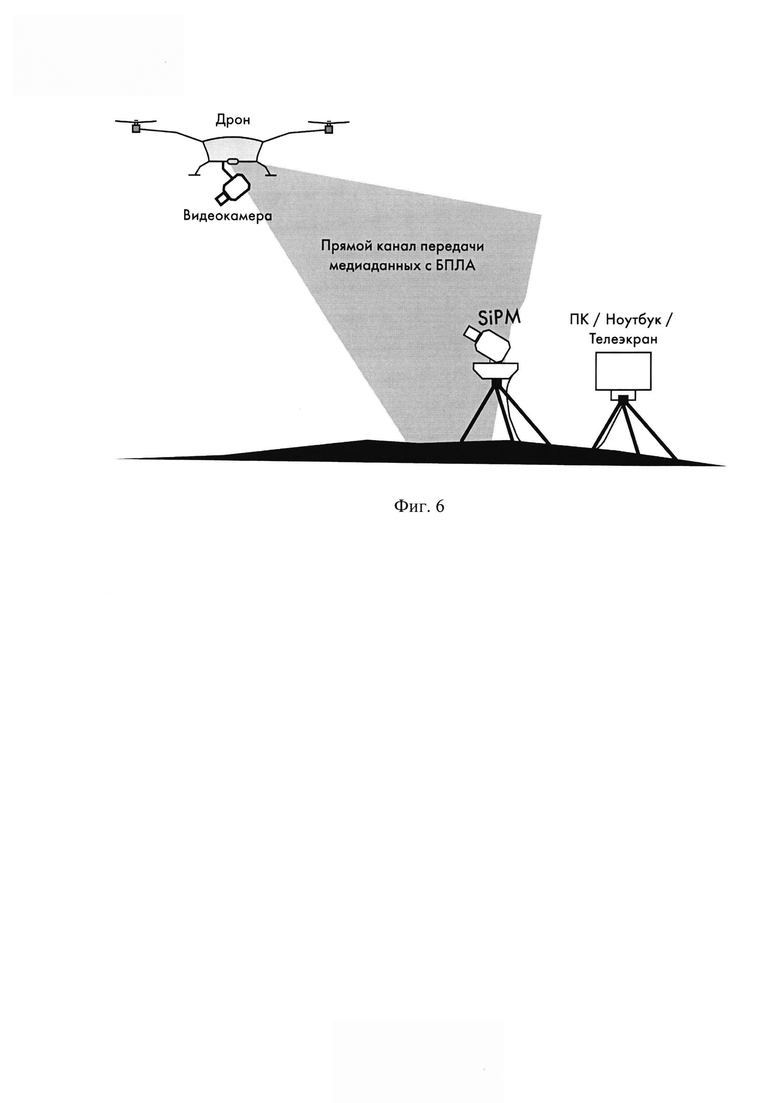
На фиг. 6 представлен пример потенциального применения заявленного изобретения: трансляция медиаинформации с дронов на большом расстоянии с качеством 4К.
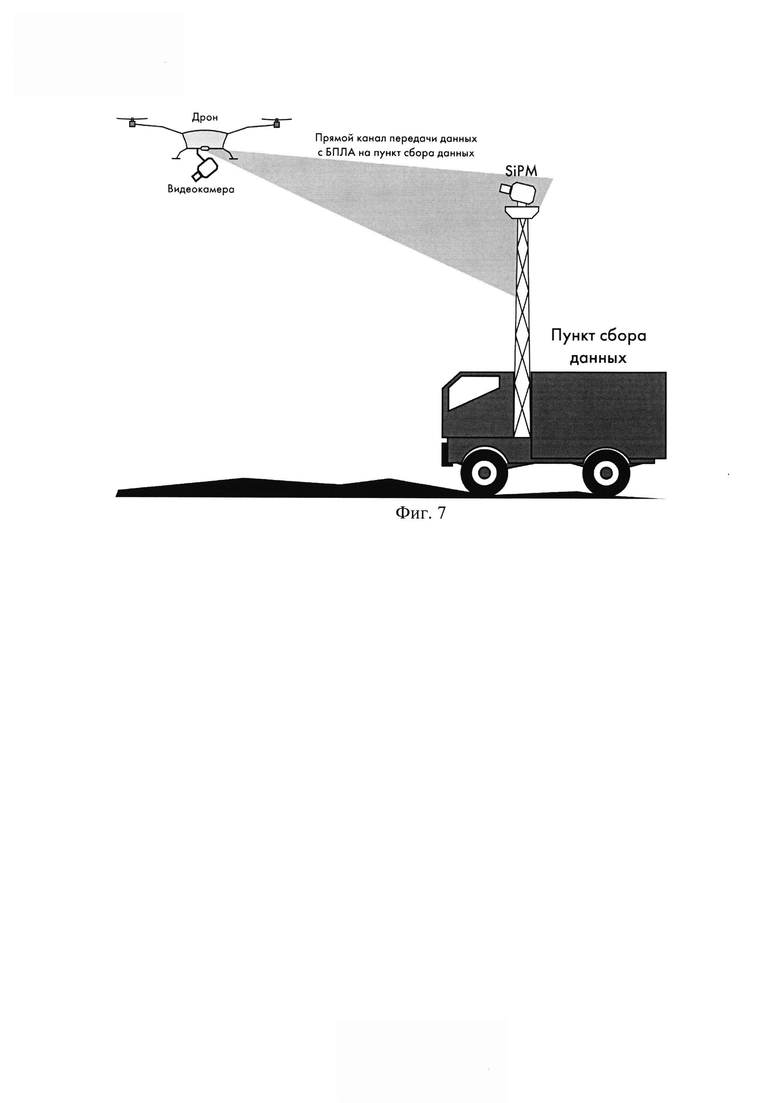
На фиг. 7 представлен пример потенциального применения заявленного изобретения, а именно сбор информации с малогабаритных разведывательных аппаратов и аппаратов мониторинга, обеспечивающий высокоскоростной сбор данных разведки и мониторинга с малогабаритных дронов.
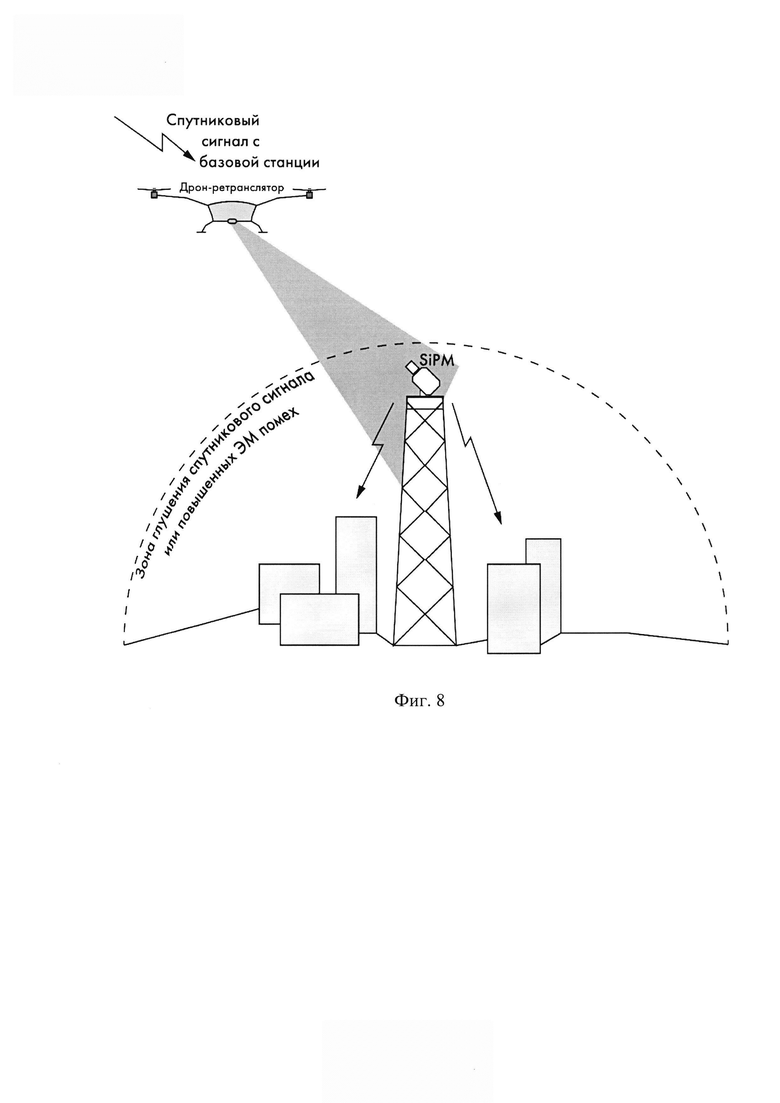
На фиг. 8 представлен пример потенциального применения заявленного изобретения, а именно использование БВС как ретранслятора спутниковых сигналов в условиях его глушения или сильных ЭМ помех
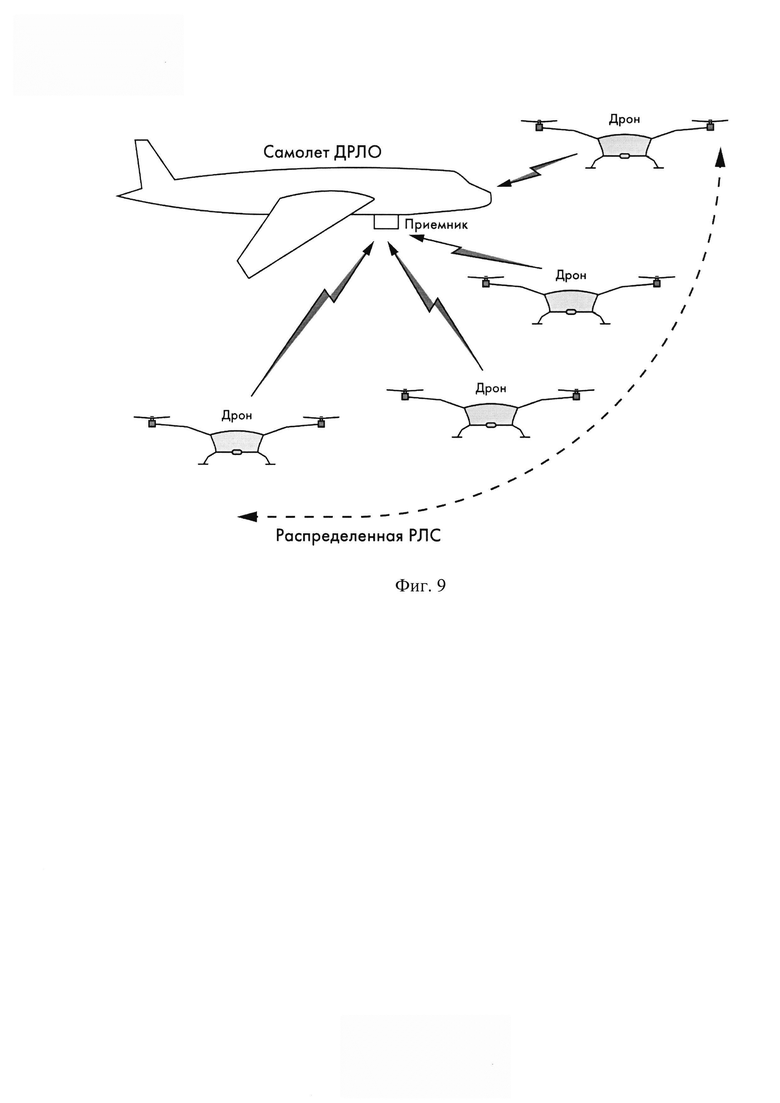
На фиг. 9 представлен пример потенциального применения заявленного изобретения, а именно в качестве малозаметной распределенной системы радио- и оптической разведки, в которой антенна реализуется роем БПЛА.
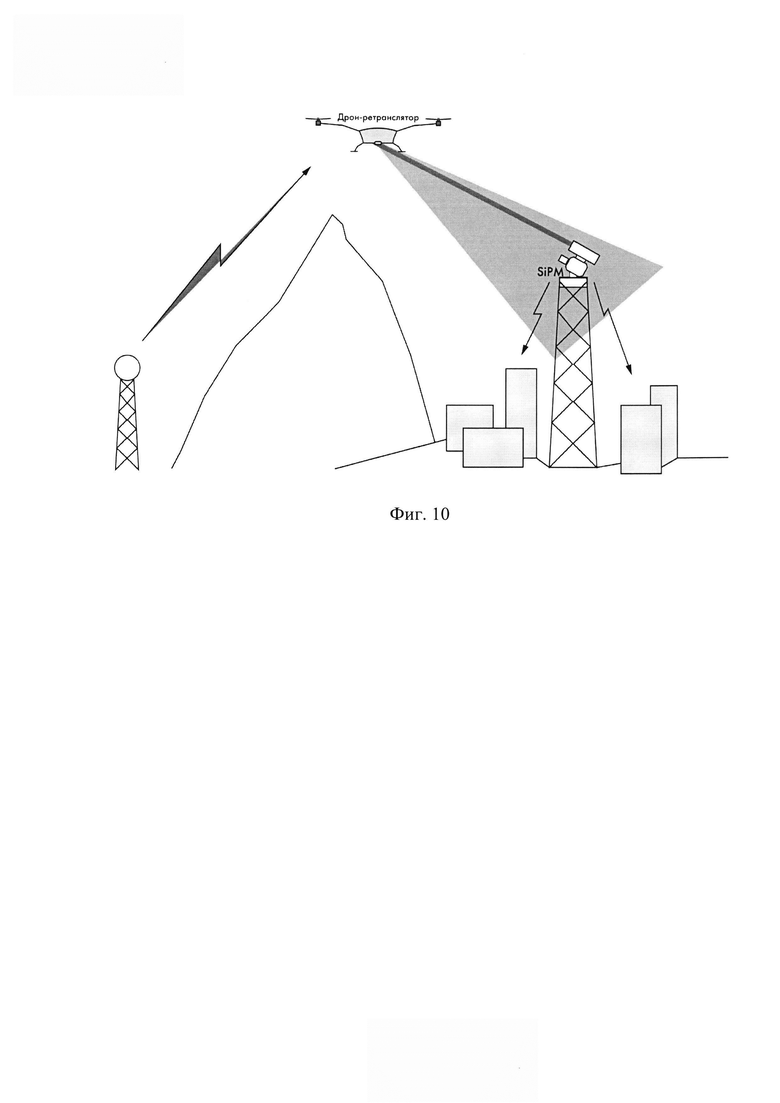
На фиг. 10 представлен пример потенциального применения заявленного изобретения, а именно: реализации этапа последней мили для интернет-линий в условиях сложного рельефа и других условий, затрудняющих радиосвязь.
Заявленное изобретение предназначено для передачи потоковой видеоинформации с беспилотных воздушных средств на пункты сбора данных, которые могут располагаться как на стационарных (наземные станции, в частности, вышки операторов сотовой связи или отдельный приемные модули, установленные на станциях базирования беспилотных летательных аппаратов), так и на подвижных носителях, таких как БВС с грузоподъемностью от 100 г., МКА, вплоть до пико-спутников, поезда, суда, автомобили, вертолеты и т.д.). Кроме того, система может быть использована для организации ретрансляции сигналов спутникового или радио-потокового вещания, в частности, в зонах его глушения; создания подвижного ретранслятора для этапа «последней мили» сети Интернет; для сбора данных с роя малогабаритных БВС/МКА.
Заявленная система обеспечивает передачу многокомпонентного медиапотока со скоростями не менее ЮМбит/сек на расстояниях между передатчиком и приемником до 1 км с ошибкой, не превышающей 10Е-10.
Кроме того, она не требует прецизионных и громоздких систем поддержания оптического канала, а наведение может осуществлять по обычной навигационной системе GPS/ГЛОНАСС/Galileo/BeiDou.
Передающий модуль системы, устанавливаемый на БВС/МКА, имеет беспрецедентно малый вес (100 г), размеры (не более 10×5×2 см) и энергопотребление (не более 5 Вт) и может устанавливаться на любые БВС, с грузоподъемностью более 100 г.
Точность наведения передающего модуля на приемный зависит от расстояния и составляет в среднем 12 град. Точность наведения приемного модуля на передатчик ~ 10 град.
Одно приемное устройство может обслуживать большое количество БВС/МКА, последовательно переключаясь с одного БВС/МКА на другой либо используя несколько чувствительных матричных детекторов.
Проблема радикального снижения требований на точность наведения передатчика решается путем использования расходящегося луча с диаметром в плоскости приемника ~ 100 м. Однако, это приводит к резкому уменьшению интенсивности излучения, т.е. малофотонному уровню сигнала, и без принципиально новой технологии приема такая система была бы неработоспособна. Проблема габаритов и веса передатчика решается путем отказа от принципа дуплексной связи, характерной, например, для современного интернета, и переходом на однонаправленную связь, при которой на модуле, устанавливаемом на БВС/МКА, остается только функция передачи данных. Это технологическое решение значительно снижает вес и габариты модуля, но и резко увеличивает ошибки при передаче информации. Для устранения ошибок в передающем модуле используется код коррекции ошибок Рида Соломона, позволяющий довести ошибки при передаче информации до уровня 10Е-10.
Конструкция приемника должна обеспечить решение двух задач: решить проблему точности наведения на передающий модуль и обеспечить надежный прием информации при малофотонном уровне сигнала. Обе эти задачи решаются путем применения технологии квантового приема информации. Ключевым устройством является многосекционная матрица, каждый пиксель которой работает в режиме счета фотонов. Конструктивно в заявленном решении используется матрица твердотельных фотоумножителей (SiPM, InGaAs РМТ, SNSPD и др.). Перед матрицей стоит объектив, который передает на фоточувствительную поверхность матрицы изображение лазерного луча передатчика формируя пятно на матрице размером несколько мм. Такая конструкция обеспечивает снижение требований к точности наведения на передатчик от угловых секунд до ~ 10 град. Многопиксельность и режим счета фотонов обеспечивает прием малофотонного сигнала. В этом режиме одновременно происходит необходимое подавление шума за счет использования импульсного режима передающего лазера и применения режима выборки по коррелированным фотонам.
При поступлении входного сигнала, содержащего потоковую видеоинформацию, на передатчик, установленный на беспилотном летающем аппарате, осуществляют шифрование сигнала, кодирование с помощью циклического кода Рида-Соломона, осуществляющего коррекцию ошибок (фиг. 2). Параметры кодирования настраиваются в зависимости от зашумленности канала передачи медиапотока.
Далее сигнал поступает в упаковщик Ethernet фреймов, формирователь импульсов, после которой оптические импульсы с помощью лазера передаются на приемник, установленный на Земле или другом носителе.
Для передачи информации может быть использован импульсный DFB лазер (частоты повторения до 10 ГГц).
Полученные импульсы, попадая на фоточувствительную поверхность многосекционной матрицы формируют пятно диаметром в несколько миллиметров (фиг. 3). Основной параметр, ограничивающий скорость передачи данных - мертвое время матричного детектора. Из уровня техники известны примеры матричных SiPM детекторов с рабочей частотой до 2.5 ГГц.
Изображение передатчика может свободно перемещаться по матрице, однако это не влияет на качество передачи (фиг. 5). Угол поля зрения системы, а значит и точность наведения можно настраивать через фокусное расстояние f объектива. Оптимальным с точки зрения фоновых шумов и критичности наведения представляется поле зрения в 10 град.
Для массива SiPM размером 24×24 мм (SensL ArrayJ-30035-64P-PCB) такой угол достигается при f=135 мм.
Далее производится анализ последовательности кадров во времени и осуществляется сравнение с пороговым коэффициентом срабатывания системы для определения случайного шума (фиг. 4).
N - пороговый коэффициент срабатывания системы, отсекающий случайный шум от сигнала. Экспериментально показано, что непрерывный рассеянный свет не дает многофотонных пиков статистики, и даже слабый регулярный сигнал хорошо виден на фоне шумов. Поэтому уже сигнал с N=10 будет хорошо различим.
В случае превышения порогового коэффициента, осуществляется отбрасывание кадра со случайным шумом, далее происходит распаковывание Ethernet фреймов, декодирование кода Рида-Соломона и дешифровка, далее информация передается на компьютер.
Для построения кодера и декодера, а также процессора обработки сигнала может быть использована ПЛИС или специализированные ИС.
Таким образом, предлагаемая система обладает следующими преимуществами:
- Некритична к угловой точности наведения, относительно существующих систем FSO, эффективна на больших дистанциях по сравнению с системами VLC. Также обладает малой массой и энергопотреблением.
- Относительно существующих радио- и WiFi систем трансляции видео с БПЛА обладает бОльшей помехозащищенностью.
Изобретение относится к системам передачи цифровой информации по слабонаправленному оптическому лазерному каналу связи с ЛА на пункт сбора данных, построенного с использованием технологии квантового приема оптической информации. Сущность заявленного решения заключается в том, что способ и система передачи медиаинформации с летательных аппаратов на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока заключается в том, что при поступлении входного сигнала, содержащего потоковую видеоинформацию, на передатчик, установленный на беспилотном летающем аппарате или космическом аппарате, осуществляют шифрование сигнала, кодирование с помощью кода Рида-Соломона, осуществляющего коррекцию ошибок, упаковку Ethernet фреймов, формирование импульсов, передачу импульсов с помощью лазера на приемник, установленный на Земле либо другом носителе, где полученные импульсы, попадая на фоточувствительную поверхность многосекционной матрицы, формируют пятно в несколько миллиметров, после чего производится анализ последовательности кадров во времени и осуществляется сравнение с пороговым коэффициентом срабатывания системы для определения случайного шума с интенсивностью ниже порога срабатывания, осуществляется отбрасывание кадра со случайным шумом, далее происходит распаковывание Ethernet фреймов, декодирование кода Рида-Соломона и дешифровка, далее информация передается на компьютер. Технический результат заключается в обеспечении возможности использования как со стационарными (наземные станции, вышки операторов сотовой сети и т.д.), так и подвижными носителями (спутники, самолеты, дирижабли, поезда, автомобили, вертолеты, беспилотные воздушные средства). 2 н. и 7 з.п. ф-лы, 10 ил.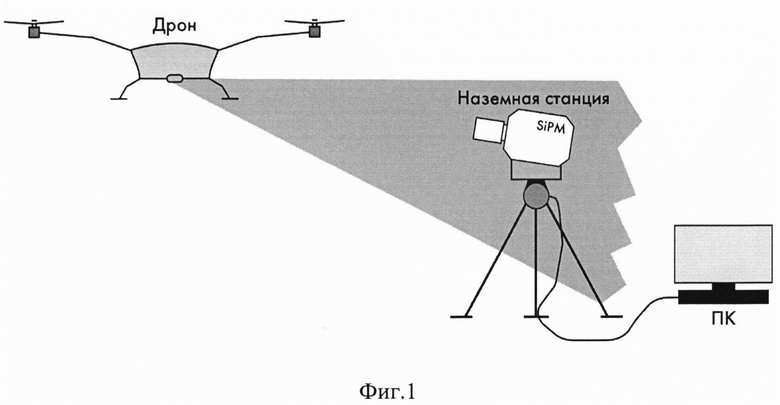
1. Система передачи медиаинформации с летательных аппаратов, в том числе с беспилотных воздушных средств, на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока, содержащая передатчик, установленный на летательном аппарате, в котором входной сигнал, содержащий потоковую видеоинформацию подается на вход шифратора, выход которого связан со входом кодера Рида-Соломона, далее передается на вход упаковщика Ethernet фреймов, выход которого связан со входом формирователя импульсов, с выхода которого оптические импульсы с помощью лазера, выполненного с возможностью формирования расходящегося луча, передаются на приемник, установленный на пункте сбора данных, выполненный с возможностью приема сигнала в малофотонном режиме, в котором попадают в высокочувствительный матричный детектор на основе SiPM, выход которого связан со входом процессора обработки сигнала, состоящего из последовательно соединенных анализатора кадров и блока селекции кадров; с выхода процессора обработки сигнала сигнал поступает в декодер, а именно последовательно на вход распаковщика Ethernet фреймов, декодер Рида-Соломона, дешифратор и далее в компьютер.
2. Система по п. 1, отличающаяся тем, что приемник установлен на неподвижном объекте.
3. Система по п. 1, отличающаяся тем, что приемник установлен на подвижном объекте.
4. Система по п. 1, отличающаяся тем, что выполнена с возможностью наведения по обычной навигационной системе GPS/ГОЛОНАСС/Galileo/BeiDou.
5. Система по п. 1, отличающаяся тем, что передатчик системы, устанавливаемый на летательном аппарате, имеет малый вес, не более 100 г, размеры не более 10×5×2 см и энергопотребление не более 5 Вт и выполнен с возможностью установки на любые летательные аппараты, с грузоподъемностью более 100 г.
6. Система по п. 1, отличающаяся тем, что передатчик выполнен с возможностью снижения точности наведения на приемник в зависимости от расстояния, составляющего в среднем 12 град, а точность наведения приемного модуля на передающий модуль ~ 10 град.
7. Система по п. 1, отличающаяся тем, что один приемник выполнен с возможностью обслуживать по меньшей мере два летательных аппарата, последовательно переключаясь с одного летательного аппарата на другой.
8. Система по п. 1, отличающаяся тем, что один приемник выполнен с возможностью обслуживать по меньшей мере два летательных аппарата одновременно, используя по меньшей мере две фоточувствительные матрицы.
9. Способ передачи медиаинформации с летательных аппаратов на пункт сбора данных по слабонаправленному оптическому каналу с квантовым приемом медиапотока, заключающийся в том, что при поступлении входного сигнала, содержащего потоковую видеоинформацию на передатчик, установленный на летательном аппарате, осуществляют шифрование сигнала, кодирование с помощью кода Рида-Соломона, осуществляющего коррекцию ошибок, упаковку Ethernet фреймов, формирование импульсов, передачу импульсов с помощью лазера на приемник, установленный на пункте сбора данных, где полученные импульсы, попадая на фоточувствительную поверхность многосекционной матрицы, формируют пятно в несколько миллиметров, после чего производится анализ последовательности кадров во времени и осуществляется сравнение с пороговым коэффициентом срабатывания системы для определения случайного шума, в случае превышения порогового коэффициента, осуществляется отбрасывание кадра со случайным шумом, далее происходит распаковывание Ethernet фреймов, декодирование кода Рида-Соломона и дешифровка, далее информация передается на компьютер или другое обрабатывающее либо накапливающее устройство.
| Статья: "Устройство для передачи и приема двоичных данных по волоконно-оптическому каналу связи", Тимофеев А.М., Ж | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| - Т | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ (ВАРИАНТЫ) | 2000 |
|
RU2176852C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |
| US 9203544 B2, 01.12.2015 | |||
| US 20120141138 A1, 07.06.2012 | |||
| US 8989579 B2, 24.03.2015. | |||

