Заявленное изобретение относится к комплексам оптической связи и локации, выполненным с возможностью нейтрализации векторов атаки на беспилотное воздушное судно (БВС) по радиоканалам связи и управления.
В последнее время на потребительском и профессиональном рынках резко вырос спрос на малогабаритные (до 30 кг) мультироторные системы, которые широко применяются при решении самых разных задач дистанционного зондирования, аэрофотосъемки, разведки, связи, РЭБ и т.д. Кроме того, военные модели способны к нанесению ударов по воздушным, наземным и надводным целям. Именно использование миниатюрных БВС в военных целях привело к качественному рывку в развитии систем РЭБ по борьбе с ними, которые, как показал конфликт в Сирийской Арабской Республике, успешно нейтрализуют угрозы, связанные с миниатюрными БВС. Основные векторы атаки - системы навигации, управления и передачи телеметрии, причем может вестись не только полное подавление определенного канала, но и дезинформация. Поэтому встает задача обеспечить БВС каналом связи, слабо подверженным радиоэлектронным помехам. Для этого хорошо подходят атмосферные оптические линии связи (АОЛС), которые хорошо себя зарекомендовали при построении сетей между неподвижными терминалами, но встречают значительные трудности при работе с подвижными абонентами.
Для этого хорошо подходят атмосферные оптические линии связи (АОЛС), которые хорошо себя зарекомендовали при построении сетей между неподвижными терминалами, но встречают значительные трудности при работе с подвижными абонентами.
Несмотря на это, на рынке существует несколько компаний, преодолевших этот технологический барьер, например МОСТКОМ (Россия). Типичные скорости, достигнутые в этом сегменте рынка АОЛС составляют около 1 Гбит/с, дальности порядка 3-4 км. Однако, доступность оптического канала связи в известных конфигурациях не позволяет реализовать систему управления БВС на его основе.
Из уровня техники известен беспилотный авиационный комплекс, содержащий бортовую радиолокационную станцию с бортовым радиоэлектронным оборудованием, предназначенное для формирования, излучения и приема радиолокационного сигнала, используемого для обнаружения и сопровождения воздушных, морских и наземных объектов на дальности до 400 км, работы в Х-диапазоне частот, причем, в качестве антенного блока используется пассивная фазированная решетка, установленная на механическом двухстепенном (по азимуту и крену) электрогидроприводе, которая обеспечивает, с учетом ширины диаграммы направленности, углы обзора, относительно строительной оси беспилотного летательного аппарата, по азимуту ± 120°, по углу места ± 60°.(RU 187275 U1 28.02.2019).
Недостаток известного решения заключается в низкой эффективности работы, связанной с высокой подверженностью радиоэлектронным помехам.
Из уровня техники известна система навигации летательных аппаратов, содержащая летательный аппарат и наземную навигационную станцию. На борту ЛА расположены: инерциальная навигационная система (ИНС), радионавигационный корректор - спутниковая навигационная система (СНС) и автономный корректор данных ИНС - вычислительный блок корреляционно-экстремальной обработки информации (КЭОИ). Наземная часть системы выполнена на персональной электронной вычислительной машине (ПЭВМ). Оценки координат, получаемые по полетным данным и в результате сопровождающего математического моделирования, объединяются по критериям однородности и принадлежности одной и той же генеральной совокупности и статистически обрабатываются. Для визуализации и последующего анализа результатов полета в динамике введен блок оценки, анализа и визуализации (ОАВ) траектории ЛА в эталонной среде в формате 3D. Повышается автономность, надежность и точность определения действительных значений координат самолетовождения (RU 2487419 C1 10.03.2013).
Из уровня техники известна также оптико-локационная система включающая в себя расположенные на оптической оси передающего канала оптически сопряженные лазерный передатчик, формирующий зондирующий пучок лазерного излучения, пилотный лазер, формирующий контрольный пучок лазерного излучения, светоделители, формирующий телескоп, призму Дове, устройство, отклоняющее пучок лазерного излучения, выходной телескоп, горизонтальную платформу с расположенными на ней первым и вторым зеркалами, выполненную с возможностью вращения вокруг вертикальной оси, три коаксиальных вала вращения, также расположенные на оптической оси приемного канала оптически сопряженные третье зеркало, обратная отражательная поверхность первого зеркала, зеркально-линзовый объектив приемного телескопа, уголковое зеркало, комбинированное фотоприемное устройство, при этом второе и третье зеркала выполнены с возможностью синхронного вращения вокруг горизонтальной оси, также устройство автоюстировки, включающее прямоугольную призму в центре первого зеркала, прямоугольные отражательные призмы в центрах второго и третьего зеркал, призму-ромб с диафрагмой, установленной на выходной грани призмы-ромба, а также блоки обработки сигналов, приводы, датчики текущего состояния и блоки управления основных оптико-механических узлов системы, центральный блок управления (RU 2292566 C1 27.01.2007).
Недостатками известных технических решений является невозможность использования на БВС.
Наиболее близким аналогам является беспилотный авиационный комплекс, содержащий безаэродромного базирования содержит БПЛА и стартовую наземную станцию, содержащую мобильную платформу и установленные на ней энергетическую установку и блок управления полетом БПЛА . БПЛА выполнен в виде двухконсольного крыла, на поворотных консолях которого установлены движители. Консоли выполнены с возможностью их поворота на 180° относительно продольной оси крыла вокруг корпуса для полезной нагрузки. На платформе стартовой наземной станции установлен вертикально трансмиссионный вал, связанный с редуктором, и стартовое устройство, установленное с помощью трех опор. Стартовое устройство содержит средства для передачи вращения от трансмиссионного вала к БПЛА , а также средства для его фиксации и расфиксации при заданной скорости вращения трансмиссионного вала. Опоры стартового устройства выполнены телескопическими с независимой регулировкой их длины от блока управления для предполетной коррекции пространственной ориентации беспилотного летательного аппарата. БАК снабжен системой предполетной автоматической статической балансировки беспилотного летательного аппарата (РФ 2403182 от 18.06.2009).
Недостаткам наиболее близкого аналога являются невозможность использования беспилотного летательного аппарата для размещения радиотехнического комплекса радиолокационного обнаружения, низкая помехозащищенность каналов управления блока управления, низкая точность определения координат.
Технической проблемой заявленного изобретения является обеспечение беспилотного воздушного средства (БВС) оптическим каналом связи, слабо подверженным радиоэлектронным помехам.
Технический результат заключается в обеспечении возможности автономного определения координат БВС без использования модулей GPS/ГЛОНАСС.
Указанный технический результат достигается в системе автономного лазерного определения координат беспилотного воздушного судна, содержащей наземную навигационную станцию (ННС) и беспилотное воздушное судно (БВС), при этом ННС содержит: компьютер, время-цифровой преобразователь, устройство управления платформами со встроенным аналого-цифровым преобразователем, шаговые двигатели, механическую поворотную систему, медленный фотодиод со встроенным усилителем, быстрый фотодиод, усилитель, лазерный передатчик, элемент «Не», компаратор; беспилотное воздушное судно содержит блок аварийного управления БВС с уголковым отражателем, при этом указанный компьютер соединен с время-цифровым преобразователем и устройством управления поворотными платформами, которое, через подключенные к нему шаговые двигатели, осуществляет управление механической платформой механической поворотной системы; лазерные импульсы сгенерированные лазерным передатчиком, через оптическую систему подаются на уголковый отражатель и отраженные от него, регистрируются быстрым и медленным фотодиодами, где сигнал с быстрого фотодиода через компаратор, элемент «Не» и время-цифровой преобразователь поступает в упомянутый компьютер; сигнал, поступающий с медленного фотодиода через встроенный АЦП устройства управления поворотными платформами также поступает в компьютер, при этом указанный компьютер осуществляет управление системой лазерного определения координат.
Дополнительной особенностью является то, что оптическая система содержит коллиматор, поляризационный светоделитель, четвертьволновую пластинку λ/4, линзу с фокусным расстоянием 4 см и интерференционные светофильтры с центральной длиной волны 810 нм и шириной спектра пропускания 10 нм.
Заявленное изобретение поясняется на фигурах чертежей, где:
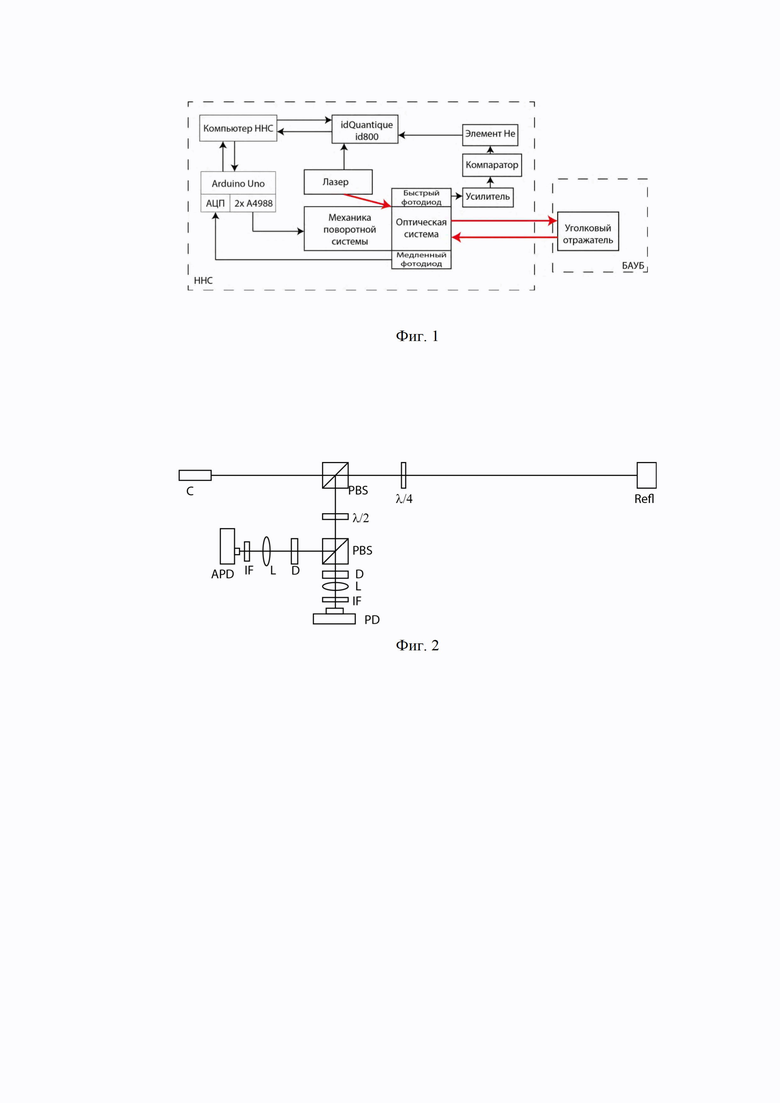
Фиг. 1 - Принципиальная схема системы автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС.
Фиг. 2 - Оптическая схема системы автономного лазерного определения координат БВС.
Заявленное изобретение объединяет в себе систему связи и передачи команд и систему автономного лазерного определения координат, которая работает независимо от бортового оборудования БВС и все вычисления которой проводятся на наземной станции. Создаваемый таким образом дублирующий оптический канал связи и управления БВС позволяет использовать БВС в зонах повышенных радиопомех или радиомолчания, а также в условиях глушения или компрометации спутниковых систем навигации. В итоге доступность канала связи с БВС увеличивается и может достигать 99.9%.
Система определения координат (фиг. 1) определяет угловые координаты и расстояние до уголкового отражателя, закрепленного на блоке аварийного управления БВС (БАУБ), относительно наземной навигационной станции (ННС). В процессе работы система осуществляет сканирование пространства лучом с целью определения углового положения уголкового отражателя, наводится на уголковый отражатель и измеряет время пролета лазерного импульса от наземной базовой станции до БАУБ и обратно, за счет чего определяется расстояние от наземной базовой станции до БАУБ. Угловые координаты определяются в процессе наведения по положению механической поворотной платформы.
Управление системой лазерного определения координат осуществляется с компьютера наземной базовой станции (фиг. 1).
Компьютер соединен через USB с Arduino Uno и время-цифровым преобразователем idQuantique id800. Arduino Uno осуществляет управление поворотными платформами механики поворотной системы, оснащенной шаговыми двигателями, платформа Arduino выбрана в первую очередь из-за существенной простоты использования. Для этого к Arduino Uno подсоединены драйверы шаговых двигателей A4988, работающие в режиме 1/16 шага.
Шаговые двигатели механических платформ осуществляют их поворот на 1 градус за 100 шагов. В итоге на 1 градус поворота механической платформы приходится 1600 микрошагов.
К встроенному АЦП Arduino Uno так же подключен медленный фотодиод с временным разрешением лучше 1 мсек (миллисекунд), со встроенным усилителем Texas Instruments OPT101P, имеющий время нарастания 28 микросекунд, что позволяет определить среднюю мощность, отражаемую уголковым отра- жателем на наземной базовой станции, (временя между двумя последовательными лазерными импульсами составляет 1 мкс).
Лазерные импульсы сгенерированные лазерным передатчиком (лазером) и отраженные от уголкового отражателя, регистрируются так же быстрым фотодиодом Alphalas UPD300-UP с временным разрешением лучше 500 псек (пикосекунд). Импульсы с детектора, имеющие амплитуду порядка 10 мВ, усиливаются до амплитуды порядка 1 В, и подаются на вход компаратора, выдающего логический сигнал «1» при превышении референсного напряжения (2.3 В) и «0» в случае, если референсное напряжение больше.
Далее полученный сигнал проходит через элемент «Не», обращающий логические уровни, и идет на вход время-цифрового преобразователя idQuantique id800.
На время-цифровой преобразователь idQuantique id800 подаются так же импульсы триггера лазера InTop PLS-405/808. Время-цифровой преобразователь позволяет определить временную задержку между триггером лазера, срабатывающим при испускании лазерного импульса, и импульсом с быстрого фотодиода, возникающим после пролета лазерного импульса с наземной базовой станции до БАУБ и обратно.
На вход оптической системы лазерного определения координат подаются импульсы лазера InTop PLS-405/808, работающего в режиме генерации наносекундный импульсов с длительностью 80 нс и частотой повторения 1 МГц. Оптическая система позволяет направить лазерный луч вдоль координат, задаваемых механической поворотной платформой, а так же принимает отраженный сигнал и делит его между быстрым и медленным фотодиодами. Излучение лазера InTop PLS-405/808 на длине волны 808 нм вводится в систему с помощью коллиматора C (CFC-8X-B, Thorlabs) оптической схемы системы автономного определения координат БВС (фиг. 2). Затем излучение проходит через поляризационный светоделитель PBS и четвертьволновую пластинку λ/4, приобретая круговую поляризацию. После этого излучение распространяется в сторону БАУБ, и отражается назад от уголкового отражателя Refl.
Проходя через четвертьволновую пластинку во второй раз, излучение становится линейно поляризованным, но с плоскостью поляризации, перпендикулярной исходной, и излучение отражается от поляризационного делителя.
Затем плоскость поляризации поворачивается с помощью полуволновой пластинки λ/4, обеспечивая плавную регулировку отношения величины оптической мощности, отраженной на втором поляризационном светоделителе в сторону быстрого фотодиода APD и прошедшего в сторону медленного фотодиода PD. При этом излучение проходит через диафрагмы D, линзы L с фокусным расстоянием 4 см и интерференционные светофильтры IF с центральной длиной волны 810 нм и шириной спектра пропускания 10 нм FWHM. Оптическая схема смонтирована с помощью 30 мм Cage-системы (Thorlabs), позволяющей обеспечить необходимую жесткость с помощью монтажа на системе стальных направляющих.
Заявленное изобретение относится к комплексам оптической связи и локации, выполненным с возможностью нейтрализации векторов атаки на беспилотное воздушное судно (БВС) по радиоканалам связи и управления. Система автономного лазерного определения координат беспилотного воздушного судна содержит наземную навигационную станцию (ННС) и БВС. При этом ННС содержит компьютер, время-цифровой преобразователь, устройство управления платформами со встроенным аналого-цифровым преобразователем, шаговые двигатели, механическую поворотную систему, медленный фотодиод со встроенным усилителем, быстрый фотодиод, усилитель, лазерный передатчик, элемент «Не», компаратор. Беспилотное воздушное судно содержит блок аварийного управления с уголковым отражателем. При этом указанный компьютер соединен с время-цифровым преобразователем и устройством управления поворотными платформами, которое, через подключенные к нему шаговые двигатели, осуществляет управление механической платформой механической поворотной системы. Лазерные импульсы сгенерированные лазерным передатчиком, через оптическую систему подаются на уголковый отражатель и отраженные от него, регистрируются быстрым и медленным фотодиодами, где сигнал с быстрого фотодиода через компаратор, элемент «Не» и время-цифровой преобразователь поступает в упомянутый компьютер. Сигнал, поступающий с медленного фотодиода через встроенный АЦП устройства управления поворотными платформами также поступает в компьютер, при этом указанный компьютер осуществляет управление системой лазерного определения координат. Технической проблемой заявленного изобретения является обеспечение БВС оптическим каналом связи, слабо подверженным радиоэлектронным помехам. 1 з.п. ф-лы, 2 ил.
1. Система автономного лазерного определения координат беспилотного воздушного судна, содержащая наземную навигационную станцию (ННС) и беспилотное воздушное судно (БВС), отличающаяся тем, что ННС содержит: компьютер, время-цифровой преобразователь, устройство управления платформами со встроенным аналого-цифровым преобразователем, шаговые двигатели, механическую поворотную систему, медленный фотодиод со встроенным усилителем, быстрый фотодиод, усилитель, лазерный передатчик, элемент «Не», компаратор; беспилотное воздушное судно содержит блок аварийного управления БВС с уголковым отражателем, при этом указанный компьютер соединен с время-цифровым преобразователем и устройством управления поворотными платформами, которое, через подключенные к нему шаговые двигатели, осуществляет управление механической платформой механической поворотной системы; лазерные импульсы сгенерированные лазерным передатчиком, через оптическую систему подаются на уголковый отражатель и отраженные от него, регистрируются быстрым и медленным фотодиодами, где сигнал с быстрого фотодиода через компаратор, элемент «Не» и время-цифровой преобразователь поступает в упомянутый компьютер; сигнал, поступающий с медленного фотодиода через встроенный АЦП устройства управления поворотными платформами, также поступает в компьютер, при этом указанный компьютер осуществляет управление системой лазерного определения координат.
2. Система по п. 1, отличающаяся тем, что оптическая система содержит коллиматор, поляризационный светоделитель, четвертьволновую пластинку λ/4, линзу с фокусным расстоянием 4 см и интерференционные светофильтры с центральной длиной волны 810 нм и шириной спектра пропускания 10 нм.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ВОЗДУШНЫХ ОБЪЕКТОВ ПРИ ПАССИВНОЙ БИСТАТИЧЕСКОЙ РАДИОЛОКАЦИИ | 2012 |
|
RU2504797C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА МОНОФОТОННОЙ УФ-С ТЕХНОЛОГИИ ДЛЯ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ ВОЗДУШНОГО СУДНА | 2014 |
|
RU2564934C1 |
| US 5787384 A, 28.07.1998 | |||
| EP 1999435 А1, 10.12.2008 | |||
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |

