Изобретение относится к области силовой преобразовательной техники и может быть использовано для управления трехфазными трехуровневыми активными выпрямителями напряжения высоковольтного преобразователя частоты, система управления которого при кратковременных несимметричных провалах напряжения сети переключает режим работы ключей активных выпрямителей с широтно-импульсного способа управления на релейно-векторное управление.
Известно устройство управления трехфазным активным выпрямителем напряжения, содержащее датчики тока и напряжения источника питания, датчик выпрямленного напряжения, широтно-импульсный модулятор, задатчик выпрямленного напряжения и задатчик реактивного тока источника питания, систему управления, включающая блок выделения симметричных составляющих напряжений прямой и обратной последовательностей в кривой напряжения источника питания, блок фазовой автоподстройке частоты, блок преобразования токов источника питания из неподвижной системы координат abc во вращающуюся систему координат dq, блок пропорционально-интегральных регуляторов активной и реактивной составляющих тока источника питания, блок преобразования управляющих напряжений прямой последовательности из вращающейся системы координат dq в неподвижную систему координат αβ, первый и второй сумматорами, блок преобразования управляющих напряжений из неподвижной системы координат αβ в систему координат abc и блок пропорционально-интегрального регулятора выпрямленного напряжения (см. патент РФ №161102, H02M 7/00).
Недостатком известного устройства является низкая надежность его работы при кратковременных несимметричных провалах напряжения источника питания, что обусловлено значительным увеличением первой гармоники отдельных фазных токов активных выпрямителей и значительным колебанием напряжения звена постоянного тока, что приводит к отключению активных выпрямителей.
Наиболее близким аналогом к заявляемому изобретению является устройство управления высоковольтным преобразователем частоты, содержащее датчик напряжения источника питания, вход которого подключен к выходу трехфазного источника питания, а выход – к блоку вычисления несимметрии напряжения источника питания, первый выход которого соединен с первым входом системы управления преобразователем частоты при симметричном напряжении источника питания, а второй выход – с задатчиком напряжения звена постоянного тока, выход которого соединен со вторым входом указанной системы управления преобразователем частоты, первый и второй выходы указанной системы управления соединены соответственно с первым и вторым управляющими входами высоковольтного преобразователя частоты, силовой вход которого подключен к источнику питания, а силовой выход – к синхронной машине, к первому информационному выходу высоковольтного преобразователя частоты через датчик тока 8 источника питания подключен третий вход системы управления преобразователем частоты, четвертый вход указанной системы управления подключен к выходу датчика напряжения источника питания, а пятый вход – к выходу датчика напряжения звена постоянного тока, три входа которого подключены ко второму, третьему и четвертому информационным выходам высоковольтного преобразователя частоты, шестой вход системы управления преобразователем частоты при симметричном напряжении источника питания подключен к задатчику реактивного тока (см. патент РФ №157682, H02M 5/458).
Недостатком известного устройства является его низкая надежность и невысокое быстродействие работы при кратковременных несимметричных провалах напряжения источника питания. Это обусловлено значительным увеличением первой гармоники отдельных фазных токов активных выпрямителей, значительным колебанием напряжения звена постоянного тока и значительной разбалансировкой напряжений на конденсаторах звена постоянного тока, что приводит к отключению трехфазных трехуровневых активных выпрямителей и нарушению работоспособности высоковольтного преобразователя частоты.
В известном устройстве рассмотрены семь случаев несимметрии напряжения источника питания. Новые углы переключения ключей α1, α2, …, α9 для заданного диапазона изменения коэффициента модуляции µ фазных напряжений активного выпрямителя были заранее рассчитаны и сохранены в блоке коррекции фазных напряжений активных выпрямителей. Новые углы переключения ключей ограничивают увеличение первой гармоники отдельных фазных токов активных выпрямителей, а также ограничивают значительные колебания напряжения звена постоянного тока, т.е. повышают надежность работы выпрямителя.
Однако семь случаев несимметрии напряжения источника питания это очень малая доля возможных вариантов однофазных, двухфазных или трехфазных несиммертичных провалов напряжения. Как указано в известном устройстве для расчета новых углов переключения ключей α1, α2, …, α9 активного выпрямителя для каждой фазы записывается система нелинейных уравнений. При этом первая гармоника фазного напряжения А1=µ(2Udc)/π задается коэффициентом модуляции µ, а гармоники с «нежелательными» номерами удаляются или их уровни снижаются до заданного значения. Определение вида и глубины несимметричного провала напряжения в реальном времени, а также решение системы нелинейных уравнений осуществляется итерационными методами и требует время на вычисление новых углов переключения ключей, что снижает быстродействие работы системы управления и всего устройства в целом.
Таким образом, в известном устройстве необходимо либо заранее рассчитать и сохранить в блоке коррекции фазных напряжений все возможные случаи несимметрии, либо по факту провала напряжения питания осуществлять расчет новых углов переключения ключей α1, α2, …, α9 активного выпрямителя, что представляет определенную сложность в реализации. С учетом вышеизложенного следует, что надежность и быстродействие известного устройства невысокие.
Техническая проблема, решаемая заявляемым устройством, заключается в повышении надежности и повышении быстродействия работы трехфазных трехуровневых активных выпрямителей при кратковременных несимметричных провалах напряжения источника питания.
Технический результат, заключается в создании условий при кратковременных несимметричных провалах напряжения источника питания, обеспечивающих: ограничение увеличения первой гармоники отдельных фазных токов активных выпрямителей, ограничение диапазона колебаний напряжения звена постоянного тока, а также снижение разбалансировки напряжений на конденсаторах звена постоянного тока до допустимых пределов, чтобы исключить аварийное отключение трехфазных трехуровневых активных выпрямителей и повысить надежность работы высоковольтного преобразователя частоты.
Поставленная проблема решается тем, что устройство управления высоковольтным преобразователем частоты, содержащее датчик напряжения источника питания, вход которого подключен к выходу трехфазного источника питания, а выход – к блоку вычисления несимметрии напряжения источника питания, первый выход которого соединен с первым входом системы управления преобразователем частоты при симметричном напряжении источника питания, а второй выход – с задатчиком напряжения звена постоянного тока, выход которого соединен со вторым входом указанной системы управления преобразователем частоты, первый и второй выходы указанной системы управления соединены соответственно с первым и вторым управляющими входами высоковольтного преобразователя частоты, силовой вход которого подключен к источнику питания, а силовой выход – к синхронной машине, к первому информационному выходу высоковольтного преобразователя частоты через датчик тока источника питания подключен третий вход системы управления преобразователем частоты, четвертый вход указанной системы управления подключен к выходу датчика напряжения источника питания, а пятый вход – к выходу датчика напряжения звена постоянного тока, три входа которого подключены ко второму, третьему и четвертому информационным выходам высоковольтного преобразователя частоты, шестой вход системы управления преобразователем частоты при симметричном напряжении источника питания подключен к задатчику реактивного тока, согласно изобретению, оно снабжено системой управления высоковольтным преобразователем частоты при несимметричном напряжении источника питания, включающей блок вычисления активной и реактивной составляющих токов источника питания, первый вход которого соединен с выходом датчика тока источника питания, а второй вход с первым выходом блока фазовой автоподстройки частоты и формирования номера сектора на третьей плоскости базовых векторов, вход указанного блока соединен с выходом датчика напряжения источника питания, первый и второй выходы блока вычисления активной и реактивной составляющих токов соединены соответственно с первыми входами релейного регулятора активного тока и релейного регулятора реактивного тока, выходы которых соединены соответственно с первым и вторым входами блока предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты, третий вход блока предварительного выбора базового вектора напряжения соединен со вторым выходом блока фазовой автоподстройки частоты и формирования номера сектора на третьей плоскости базовых векторов, при этом второй вход релейного регулятора активного тока соединен с первым выходом блока вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах звена постоянного тока высоковольтного преобразователя частоты, первый вход указанного блока вычисления соединен с выходом задатчика напряжения звена постоянного тока, при этом второй вход релейного регулятора реактивного тока соединен с выходом задатчика реактивного тока, первый выход блока предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты соединен с первым входом блока выбора базового вектора напряжения для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя, второй выход блока предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты соединен с первым входом блока выбора базового вектора напряжения для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя, вторые входы указанных блоков выбора базового вектора напряжения соединены со вторым выходом блока вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах звена постоянного тока высоковольтного преобразователя частоты, второй вход указанного блока вычисления соединен с выходом датчика напряжения звена постоянного тока, первый выход блока выбора базового вектора напряжения для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя через блок хранения своего предыдущего значения базового вектора напряжения соединен со своим третьим входом, при этом второй выход блока выбора базового вектора напряжения для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя соединен с первым управляющим входом высоковольтного преобразователя частоты, первый выход блока выбора базового вектора напряжения для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя через блок хранения своего предыдущего значения базового вектора напряжения соединен со своим третьим входом, при этом второй выход блока выбора базового вектора напряжения для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя соединен со вторым управляющим входом высоковольтного преобразователя частоты.
Сущность изобретения поясняется чертежами, где:
- на фиг. 1 изображена функциональная схема устройства управления высоковольтным преобразователем частоты;
- на фиг. 2 изображена функциональная схема высоковольтного преобразователя частоты;
- на фиг. 3 изображена схема трехфазного трехуровневого активного выпрямителя напряжения;
- на фиг. 4 изображены две плоскости, каждая из которых содержит двадцать четыре ненулевых базовых вектора напряжения, которые определенным образом объединены в семь групп − а, b, c, ap, an, bp и bn;
- на фиг. 5 изображена плоскость, содержащая 144 ненулевых базовых вектора напряжения, которые получены в результате суммирования специально отобранных векторов, изображенных на ранее указанных двух плоскостях;
- на фиг. 6 изображена таблица с предварительно выбранными базовыми векторами напряжения для активных выпрямителей напряжений, для различных секторов и для двух диапазонов регулирования;
- на фиг. 7 приведены упрощенная схема замещения активного выпрямителя напряжения (а) и векторные диаграммы (б, в, г), поясняющие динамику изменения активного и реактивного токов активного выпрямителя напряжения;
- на фиг. 8 приведены характеристики релейных регуляторов активного и реактивного токов активного выпрямителя напряжения;
- на фиг. 9 и фиг. 10 приведены осциллограммы изменения отдельных координат устройства управления высоковольтным преобразователем частоты за пять периодов питающего напряжения (а…и), полученные на основании математической модели в программной среде Matlab Simulink.
Заявляемое устройство управления высоковольтным преобразователем частоты (фиг. 1), содержит датчик напряжения источника питания 1, вход которого подключен к выходу трехфазного источника питания 2, а выход – к блоку вычисления несимметрии напряжения источника питания 3. Первый выход блока вычисления несимметрии напряжения соединен с первым входом системы управления преобразователем частоты при симметричном напряжении источника питания 4, а второй выход – с задатчиком напряжения звена постоянного тока 5. Выход задатчика напряжения соединен со вторым входом указанной системы управления преобразователем частоты. Первый и второй выходы указанной системы управления 4 соединены соответственно с первым и вторым управляющими входами высоковольтного преобразователя частоты 6, силовой вход которого подключен к источнику питания 2, а силовой выход – к синхронной машине 7. К первому информационному выходу высоковольтного преобразователя частоты через датчик тока 8 источника питания подключен третий вход системы управления преобразователем частоты. Четвертый вход указанной системы управления подключен к выходу датчика напряжения источника питания 1, а пятый вход – к выходу датчика напряжения звена постоянного тока 9. Три входа указанного датчика напряжения 9 подключены ко второму, третьему и четвертому информационным выходам высоковольтного преобразователя частоты. Шестой вход системы управления преобразователем частоты при симметричном напряжении источника питания 4 подключен к задатчику реактивного тока 10.
Устройство управления (фиг. 1) дополнительно снабжено системой управления высоковольтным преобразователем частоты при несимметричном напряжении источника питания 11. Система управления включает блок вычисления активной и реактивной составляющих токов 12 источника питания. Первый вход указанного блока соединен с выходом датчика тока источника питания 8, а второй вход с первым выходом блока фазовой автоподстройки частоты 13 и формирования номера сектора на третьей плоскости базовых векторов, вход указанного блока соединен с выходом датчика напряжения источника питания 1. Первый и второй выходы блока вычисления активной и реактивной составляющих токов соединены соответственно с первыми входами релейного регулятора активного тока 14 и релейного регулятора реактивного тока 15. Выходы указанных релейных регуляторов соединены соответственно с первым и вторым входами блока предварительного выбора базового вектора напряжения 16 активных выпрямителей высоковольтного преобразователя частоты. Третий вход блока предварительного выбора базового вектора напряжения 16 соединен со вторым выходом блока фазовой автоподстройки частоты 13 и формирования номера сектора на третьей плоскости базовых векторов. При этом второй вход релейного регулятора активного тока 14 соединен с первым выходом блока вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах 17 звена постоянного тока высоковольтного преобразователя частоты. Первый вход указанного блока вычисления 17 соединен с выходом задатчика напряжения звена постоянного тока 5. При этом второй вход релейного регулятора реактивного тока 15 соединен с выходом задатчика реактивного тока 10. Первый выход блока предварительного выбора базового вектора напряжения 16 активных выпрямителей высоковольтного преобразователя частоты соединен с первым входом блока выбора базового вектора напряжения 18 для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя. Второй выход блока предварительного выбора базового вектора напряжения 16 активных выпрямителей высоковольтного преобразователя частоты соединен с первым входом блока выбора базового вектора напряжения 19 для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя. Вторые входы указанных блоков 18, 19 выбора базового вектора напряжения соединены со вторым выходом блока вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах 17 звена постоянного тока высоковольтного преобразователя частоты. Второй вход указанного блока вычисления 17 соединен с выходом датчика напряжения звена постоянного тока 9. Первый выход блока выбора базового вектора напряжения 18 для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя через блок хранения своего предыдущего значения базового вектора напряжения 20 соединен со своим третьим входом. При этом второй выход блока выбора базового вектора напряжения 18 для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя соединен с первым управляющим входом высоковольтного преобразователя частоты 6. Первый выход блока выбора базового вектора напряжения 19 для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя через блок хранения своего предыдущего значения базового вектора напряжения 21 соединен со своим третьим входом. При этом второй выход блока выбора базового вектора напряжения 19 для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя соединен со вторым управляющим входом высоковольтного преобразователя частоты 6.
Высоковольтный преобразователь частоты 6 (фиг. 2), также как и в прототипе, содержит первый 22 и второй 23 трехфазные фазосдвигающие трансформаторы соответственно на 0 и +30 градусов. Первичная обмотка первого фазосдвигающего трансформатора 22 имеет шесть выводов и соединена последовательно с первичной обмоткой второго фазосдвигающего трансформатора 23, которая соединена в звезду. При этом начало первичной обмотки первого фазосдвигающего трансформатора 22 подключено к источнику питания 2. Вторичные обмотки указанных трансформаторов соединены в звезду и треугольник (фиг. 2) и подключены соответственно к первому 24 и второму 25 преобразователям частоты. Каждый преобразователь состоит из трехфазного трехуровневого активного выпрямителя 26, трехфазного трехуровневого инвертора напряжения 27 и дросселя 28. При этом одноименные выходные зажимы фаз преобразователей частоты соединены между собой и подключены к синхронной машине 7. Входы общего для обоих преобразователей частоты звена постоянного тока 29 с нулевой точкой подключены к выходам обоих активных выпрямителей 26, а выходы указанного звена постоянного тока подключены к входам обоих инверторов напряжения 27.
Трехфазный трехуровневый активный выпрямитель 26 (фиг. 3), также как и в прототипе, содержит три фазные стойки 30, 31 и 32, выходы которых соединены параллельно и подключены к звену постоянного тока 29, которое содержит два последовательно соединенных конденсатора 33 и 34. Первый конденсатор 33 создает положительный потенциал на фазах инвертора 27, а второй конденсатор 34 – отрицательный потенциал. Общая точка конденсаторов 35 является нейтральной точкой трехфазного трехуровневого активного выпрямителя 26 и создает нулевой потенциал на фазах инвертора 27. Каждая из фазных стоек 30, 31 и 32 содержит четыре последовательно соединенных полностью управляемых ключа 36, 37, 38 и 39. К точке соединения первого 36 и второго 37 управляемых ключей в каждой фазной стойке подключен катод первого диода 40, анод которого подключен к нейтральной точке 35 активного выпрямителя. Точка соединения второго 37 и третьего 38 управляемых ключей является силовым входов активного выпрямителя 26 в каждой фазной стойке. К точке соединения третьего 38 и четвертого 39 управляемых ключей в каждой фазной стойке подключен анод второго диода 41, катод которого подключен к нейтральной точке 35 активного выпрямителя. Силовые входы первого и второго активных выпрямителей 26 подключены соответственно к вторичным обмоткам первого 22 и второго 23 фазосдвигающих трансформаторов.
В заявляемом устройстве трехфазный трехуровневый активный выпрямитель 26 выполнен на полностью управляемых ключах 36 – 39 (фиг. 3) с системой релейно-векторного управления при кратковременных несимметричных провалах напряжения сети. Применение двух трехфазных фазосдвигающих трансформаторов и трехуровневого активного выпрямителя в мощных регулируемых электроприводах, например, для прокатных станов, способствует улучшению формы входного тока активного выпрямителя при относительно невысокой частоте коммутации его ключей.
К частотно-регулируемым электроприводам непрерывных технологических объектов, например к электроприводам прокатных станов, предъявляются высокие требования к надежности их электроснабжения. Так как, неконтролируемое отключение указанных электроприводов снижает производительность, а также может вызвать механическое повреждение дорогостоящего оборудования. В заявляемом устройстве благодаря системе релейно-векторного управления ключами активных выпрямителей обеспечивается высокое быстродействие электропривода и повышение устойчивости к возмущениям со стороны питающей сети.
При этом большое значение имеет структура таблицы переключений ключей активных выпрямителей, обеспечивающая минимальное число переключений и удовлетворительное качество переходных процессов. Регулируемыми величинами в системе релейно-векторного управления заявляемого устройства являются активная и реактивная составляющие токов источника питания, их регулирование осуществляется путем рационального выбора базовых векторов напряжения активных выпрямителей высоковольтного преобразователя частоты.
На фиг. 4,а изображена плоскость, которая широко известна и общедоступна в источниках посвященных данной тематике (см. патент РФ № 168787). Указанная плоскость содержат двадцать четыре ненулевых базовых вектора напряжения, которые определенным образом объединены в семь групп − а, b, c, ap, an, bp и bn. Вектора расположены на границах двенадцати тридцатиградусных секторов, которые пронумерованы от 1.1 до 1.12. Эти вектора обеспечивают регулирование входного напряжения активного выпрямителя первого преобразователя частоты в пределах от 0,5 до 1,0 его номинального значения. Возле каждого из двадцати четырех векторов (фиг. 4,а) расположены три большие буквы, которые указывают, каким образом при выборе этого вектора осуществляется подключение соответствующих входов А, В и С активного выпрямителя 26 (фиг. 3) первого преобразователя частоты 24 к звену постоянного тока 29 преобразователя частоты. Например, обозначение P0N указывает, что вход фазы А активного выпрямителя 26 подключен к положительному потенциалу (Р) звена постоянного тока 29 преобразователя частоты, вход фазы В – к его нейтральной точке (0), а вход фазы С – к его отрицательному потенциалу (N).
На фиг. 4,б изображена вторая плоскость с аналогичными базовыми векторами а, b, c, ap, an, bp и bn, которые совместно с секторами от 2.1 до 2.12 относительно своих одноименных векторов на фиг. 4,а повернуты на 30 градусов против хода часовой стрелки. Вектора на второй плоскости (фиг. 4,б) обеспечивают регулирование входного напряжения активного выпрямителя 26 второго преобразователя частоты 25 в пределах от 0,5 до 1,0 его номинального значения. Три большие буквы возле каждого вектора, как и ранее, указывают, каким образом при выборе этого вектора осуществляется подключение входов активного выпрямителя 26 второго преобразователя частоты 25 к звену постоянного тока 29 преобразователя частоты.
На фиг. 5 изображена третья плоскость, содержащая 144 ненулевых базовых вектора напряжения, которые получены в результате суммирования специально отобранных векторов, изображенных на первой и второй плоскостях базовых векторов напряжений (фиг. 4,а и 4,б). Отметим, что реальное количество векторов, которое можно получить по результатам суммирования, достигает 576 штук, т.е. значительно больше, чем их изображено на фиг. 5. Здесь показаны специально отобранные вектора, обеспечивающие минимальное количество переключений ключей в каждом активном выпрямителе, их равномерную загрузку и высокий коэффициент полезного действия каждого активного выпрямителя и всего преобразователя в целом. Далее будет описан алгоритм работы заявляемого устройства с этими векторами (фиг. 5), которые позволяют обеспечить высокое быстродействие преобразователю частоты, что особенно важно при кратковременных несимметричных провалах напряжения питающей сети.
Заявляемое устройство также обеспечивает высокую надежность работы преобразователю частоты и удовлетворительный гармонический состав его входных токов.
Алгоритм формирования базовых векторов напряжений на фиг. 5 следующий.
Первый шаг – каждый вектор первой плоскости (фиг. 4,а) суммируется, с вектором второй плоскости (фиг. 4,б), который имеет такое же направление в изображенной системе координат. Например, вектор «а» на фиг. 4,а суммируется с вектором «c» на фиг. 4,б, имеющий такое же направление.
Второй шаг – каждый вектор первой плоскости (фиг. 4,а) суммируется, с вектором второй плоскости, направление которого отличается от его направления на  градусов. Например, вектор «а» (фиг. 4,а) суммируется с векторами «a», «ap» и «an» (фиг. 4,б), опережающие его на 30 градусов, и с векторами «b», «bp» и «bn», отстающие от него на 30 градусов.
градусов. Например, вектор «а» (фиг. 4,а) суммируется с векторами «a», «ap» и «an» (фиг. 4,б), опережающие его на 30 градусов, и с векторами «b», «bp» и «bn», отстающие от него на 30 градусов.
В результате суммирования вышеуказанных векторов получим семь векторов «aс», «aа», «аap», «аan», «аb», «аbp» и «аbn». Однако на фиг. 5 изображено пять векторов «aa», «ac», «ab», «aapn», «abpn». Здесь запись «aapn» означает, что фактически на этом месте на плоскости векторов находятся два вектора «aap» и «aan», имеющие одинаковое направление и равные модули. Приведенная запись «aapn» позволяет уменьшить количество векторов, изображаемых на плоскости фиг. 5, т. е. сделать рисунок менее насыщенным векторами. Аналогично, обозначение «abpn» указывает, что на этом месте находятся два вектора «abp» и «abn». Сказанное справедливо и для остальных записей на фиг. 5, в том числе для записей, содержащих два вектора с двумя индексами. Например, обозначение «apnapn» указывает, что на этом месте на плоскости находятся четыре вектора «apap», «apan», «anap» и «anan».
Поясним, как ведет себя активный выпрямитель 26 (фиг. 3) при выборе вектора «ap» или «an» (фиг. 4,а). Так как оба вектора занимают одно и то же местоположение на плоскости векторов, следовательно, они формируют одинаковое линейное напряжение на входе активного выпрямителя 26.
Однако при выборе, например, вектора «ap» верхний конденсатор 33 звена постоянного тока 29 (фиг. 3) будет заряжаться, а нижний 34 – разряжаться, так как вектору «ap» соответствуют, например, три большие буквы Р00 (фиг. 4,а), что означает подключение входа А активного выпрямителя 26 к положительному потенциалу (Р) звена постоянного тока 29 и подключение входов В и С к его нейтральной точке (0).
Если же выбрать вектор «an» (фиг. 4,а), то конденсатор 33 (фиг. 3) будет разряжаться, а конденсатор 34 – заряжаться, так как вектору «an» соответствуют три большие буквы 0NN, что означает подключение входа А активного выпрямителя 26 к нейтральной точке (0) звена постоянного тока 29 и подключение входов В и С к его отрицательному потенциалу (N).
Описанные процессы заряда и разряда конденсаторов 33 и 34 (фиг. 3) в звене постоянного тока 29 в дальнейшем будут использованы для их естественной и принудительной балансировки при работе активных выпрямителей 26 обоих преобразователей частоты 24 и 25 (фиг.2).
Все вышеописанное, т.е. формирование входного напряжения на входе активного выпрямителя и балансировка конденсаторов 33 и 34 справедливо и для векторов «bp» и «bn» (фиг. 4).
Третий шаг – все вектора распределены между тремя группами (фиг. 5), в зависимости от длины их модулей: группа коротких векторов, группа средних векторов и группа длинных векторов. При этом в пределах каждой группы модули векторов не должны существенно отличаться друг от друга. Модули средних векторов в 1,41 и 1,5 больше, чем модули коротких векторов, а модули длинных векторов в 1,93 и 2 раза больше, чем модули коротких векторов. Пояснения, почему средние и длинные вектора во столько раз отличаются от коротких векторов, будут даны ниже.
К группе коротких векторов (фиг. 5) относятся вектора «apnapn», «bpnapn», «bpnbpn», «apnbpn». На третьей плоскости базовых векторов их изображено 12 штук. Однако, как ранее было отмечено, двойной индекс вектора «apn» указывает, что фактически на указанном месте на плоскости векторов находятся два вектора «ap» и «an». Обозначение вектора «apnapn» указывает, что на указанном месте на плоскости векторов находятся четыре вектора «apap», «apan», «anap» и «anan». Таким образом, на фиг. 5 общее количество коротких векторов - 48, при этом модули всех векторов равны. Заметим, что заявляемая система управления преобразователем частоты по определенному алгоритму определяет, какой конкретно из четырех коротких векторов, занимающих одинаковое местоположение, выбран в данный момент времени для эффективного регулирования входных напряжений активных выпрямителей 26 высоковольтного преобразователя частоты 6 (фиг. 2).
К группе средних векторов на фиг. 5 относятся вектора «apna», «capn», «bpna» и т.д. Каждый средний вектор содержит один из следующих векторов «a», «b» или «c» и один из двух векторов «apn» или «bpn» в разных комбинациях. Количество таких векторов (фиг. 5) – 36. Однако, учитывая, что каждый средний вектор содержит один вектор с двойным индексом, то общее количество средних векторов будет равно 72. Заметим, что среди средних векторов есть 48 векторов, модули которых ровно в 1,5 раз больше, чем модули коротких векторов. Кроме того, среди средних векторов есть 24 вектора, модули которых отличаются в 1,41 раз от модулей коротких векторов, т. е. они будут чуть короче. Разница составляет 6 %, принимает, что это вполне допустимое отклонение. На фиг. 5 видно, что чуть укороченные средние вектора содержат в своем составе вектор «с», например, «capn», «bpnc» и т. д.
К группе длинных векторов (фиг. 5) относятся вектора «aa», «ca», «ba» и т. д. Количество таких векторов 24. Причем модули 12 длинных векторов («аа», «ba», «bb» и т. д.) в 2 раза больше, чем модули коротких векторов («apnapn», «bpnapn» и т. д.), а модули других 12 векторов отличаются в 1,93 раза от модулей коротких векторов, т. е. чуть короче. Разница составляет 3, 5%, принимает, что это вполне допустимое отклонение. На фиг. 5 видно, что чуть укороченные длинные вектора содержат в своем составе вектор «с», например, «ca», «bc» и т. д.
Отметим, что среди отобранных векторов на фиг. 5 отсутствует вектор «сс», несмотря на то, что угол между векторами «с» на фиг. 4,а и фиг. 4,б равен 30 градусам. Отсутствие вектора «сс» на фиг. 5 обусловлено тем, что его модуль превышает модуль среднего вектора «apna» на 15 % и короче модуля длинного вектора «аа» на 13,4 %. Указанные отклонение модуля внутри средних и длинных групп векторов считаем недопустимыми. Поэтому вектор «сс» не участвует в регулировании входных напряжений активных выпрямителей 26 высоковольтного преобразователя частоты 6 (фиг. 2).
Таким образом, из 576 векторов, которые можно было получить в результате суммирования векторов первой и второй базовых плоскостей (фиг. 4,а, 4,б) отобрано 144 ненулевых базовых вектора напряжения, разделенных на три группы: короткие - 48, средние - 72 и длинные - 24. При этом длинные вектора «aa», «ca», «ba» и т. д., делят третью плоскость на двадцать четыре пятнадцатиградусных сектора, пронумерованные (фиг. 5) номерами от 3.1 до 3.24.
Заявляемая система управления в процессе ее работы в определенные моменты времени осуществляет выбор одного из 144 векторов. За период питающего напряжения выбранные вектора эффективно регулируют мгновенные входные напряжения активных выпрямителей 26 (фиг. 2) первого 24 и второго 25 преобразователей частоты в пределах от 0,5 до 1,0 их номинальных значений. При этом выбранные вектора обеспечивают минимальное количество переключений ключей в каждом активном выпрямителе, их равномерную загрузку, высокий коэффициент полезного действия каждого активного выпрямителя и всего преобразователя 6 в целом. Кроме того, достигается высокое быстродействие преобразователя частоты при использовании вышеуказанных векторов (фиг. 5), что особенно важно при кратковременных несимметричных провалах напряжения. Заявляемая система управления также обеспечивает высокую надежность работы преобразователя частоты и удовлетворительный гармонический состав его входных токов, благодаря формированию мгновенных значений напряжений на входах активных выпрямителей такой величины, формы и фазы, что потребляемые из сети токи являются практически синусоидальными.
Введем понятие «1-ый диапазон регулирования», когда для формирования входных напряжений активных выпрямителей 26 первого 24 и второго 25 преобразователей частоты (в пределах от 0,5 до 0,75 их номинальных значений) выбираются короткие и средние вектора (фиг. 5). Например, для сектора 3.1 в 1-ом диапазоне регулирования участвуют следующие вектора: «apnapn», «bpnapn», «aapn» и «сapn».
Введем понятие «2-ой диапазон регулирования», когда для формирования мгновенных входных напряжений активных выпрямителей 26 первого 24 и второго 25 преобразователей частоты (в пределах от 0,75 до 1,0 их номинальных значений) выбираются средние и длинные вектора (фиг. 5). Например, для сектора 3.1 во 2-ом диапазоне регулирования участвуют следующие вектора: «aapn», «capn», «aa» и «сa». Понятия 1-ый и 2-ой диапазоны регулирования в дальнейшем будут использованы для описания работы заявляемого устройства.
Кроме 144 базовых векторов напряжений и 24 секторов на фиг. 5 изображен овал, который отображает траекторию перемещения конца вектора напряжения сети  при несимметричном провале напряжения источника питания 2. Изображенный овал (фиг. 5) обусловлен следующей несимметрией: в фазе А провал составляет 40 %, а в фазах В и С провал отсутствует.
при несимметричном провале напряжения источника питания 2. Изображенный овал (фиг. 5) обусловлен следующей несимметрией: в фазе А провал составляет 40 %, а в фазах В и С провал отсутствует.
Отметим, что два участка овала расположены в тех областях некоторых секторов, где для регулирования входных напряжений активных выпрямителей 26 используют длинные и средние вектора напряжений, т. е. во 2-ом диапазоне регулирования. Такими секторами (фиг. 5) можно считать сектора с номерами 3.4, 3.5, 3.6, 3.7, 3.8, 3.9, а также сектора с номерами 3.16, 3.17, 3.18, 3.19, 3.20 и 3.21.
Еще два участка овала расположены в тех областях некоторых секторов, где для регулирования входных напряжений активных выпрямителей 26 используют средние и короткие вектора напряжений, т. е. в 1-ой диапазоне регулирования. Такими секторами (фиг. 5) можно считать сектора с номерами 3.11, 3.12, 3.13, 3.14, а также сектора с номерами 3.23, 3.24, 3.1 и 3.2.
Кроме того, овал имеет два участка, на которых его траектория переходит из 1-го диапазона регулирования во 2-ый диапазон регулирования, это сектора 3.3 и 3.15, и два участка, на которых его траектория переходит из 2-го диапазона регулирования в 1-ой диапазон регулирования, это сектора 3.10 и 3.22.
Описанная особенность траектории конца вектора напряжения сети при несимметричном провале напряжения источника питания 2, учитывается в дальнейшем в алгоритме работы заявляемой системы.
Отметим, что в обозначениях векторов (фиг.5) первая буква указывает на вектор (см. фиг. 4,а), осуществляющий регулирование импульсного входного напряжения активного выпрямителя 26 первого преобразователя частоты 24 (фиг. 2), а вторая буква - на вектор (фиг. 4,б) осуществляющий регулирование импульсного входного напряжения активного выпрямителя 26 второго преобразователя частоты 25 (фиг. 2). Например, вектор «ас» расположенный на границе секторов 3.23 и 3.24 (фиг. 5) указывает, что в первом преобразователе частоты 24 (фиг. 2) регулирование импульсного входного напряжения активного выпрямителя осуществляет вектор «а», а во втором преобразователе частоты 25 - вектор «с».
В нормальном режиме работы высоковольтного преобразователя частоты 6 (фиг. 2) напряжение источника питания 2 делится примерно поровну между первым 22 и вторым 23 трехфазными фазосдвигающими трансформаторами. Роль буферных реакторов, которые, как известно, являются неотъемлемым элементом активных выпрямителей напряжений, в приведенной схеме преобразователя частоты 6 исполняют индуктивности рассеяния указанных трансформаторов 22 и 23. При этом их коэффициенты трансформации выбраны таким образом, чтобы оба трансформатора 22 и 23 и оба активных выпрямителя 26 были загружены одинаково.
Ранее отмечалось, что первая плоскость базовых векторов напряжений (фиг. 4,а) позволяет сформировать мгновенные входные напряжения на стороне переменного тока активного выпрямителя 26 первого преобразователя частоты 24 (фиг. 2). Согласно принципу работы активного выпрямителя напряжения разность мгновенных значений синусоидального напряжения питающей сети и мгновенных входных напряжений на зажимах переменного тока активного выпрямителя воспринимается буферными реакторами. Благодаря использованию режима широтно-импульсной модуляции мгновенное значение напряжения, формируемое активным выпрямителем на стороне переменного тока, имеет удовлетворительный гармонический состав, в котором основная гармоника и высшие гармоники существенно различаются по частоте и амплитуде. Это создает благоприятные условия для фильтрации высших гармоник тока буферными реакторами и формирования практически синусоидального тока сети.
Кроме того, фазовый угол тока выпрямителя зависит от соотношения амплитуд и фазовых углов напряжений, приложенных к буферным реакторам со стороны сети и со стороны активного выпрямителя, а также от параметров (индуктивности и активного сопротивления) реактора. Варьируя с помощью системы управления активным выпрямителем напряжения параметрами основной гармоники его переменного напряжения на зажимах А, В и С (фиг. 3), можно обеспечить потребление из сети необходимого тока ( ) с заданным фазовым углом. Иными словами, можно обеспечить работу преобразователя частоты с заданным значением коэффициента мощности, например равным единице, что осуществляется в заявляемой системе управления.
) с заданным фазовым углом. Иными словами, можно обеспечить работу преобразователя частоты с заданным значением коэффициента мощности, например равным единице, что осуществляется в заявляемой системе управления.
Таким образом, первая плоскость базовых векторов напряжений (фиг. 4,а) позволяет сформировать мгновенное входное напряжение на стороне переменного тока активного выпрямителя 26 (фиг. 2) первого преобразователя частоты 24. Роль буферного реактора для указанного выпрямителя исполняет индуктивность рассеяния первого трансформатора 22, а в качестве мгновенных значений синусоидального напряжения питающей сети используется напряжение на первичных обмотках указанного трансформатора.
Аналогично, вторая плоскость базовых векторов напряжений (фиг. 4,б) позволяет сформировать мгновенное входное напряжение на стороне переменного тока активного выпрямителя 26 (фиг. 2) второго преобразователя частоты 25. При этом роль буферного реактора для указанного выпрямителя исполняет индуктивность рассеяния второго трансформатора 23, а в качестве мгновенных значений синусоидального напряжения питающей сети используется напряжение на первичных обмотках указанного трансформатора.
Третья плоскость базовых векторов напряжений (фиг. 5) позволяет сформировать фиктивное мгновенное входное напряжение на стороне переменного тока при одновременной работе обоих активных выпрямителей 26 первого 24 и второго 25 преобразователей частоты. При этом, как и в классических активных выпрямителях напряжения, в качестве мгновенных значений синусоидального напряжения используется напряжение источника питания 2.
В действительности фиктивное мгновенное входное напряжение не существует, т.е. измерить его каким либо прибором или увидеть на экране осциллографа невозможно. Однако его формирование в заявляемом устройстве позволяет существенно упростить алгоритм формирования управляющих сигналов активными выпрямителями 26 (фиг. 2) высоковольтного преобразователя частоты 6 при кратковременных несимметричных провалах напряжения сети.
На фиг. 6 изображена таблица с предварительно выбранными базовыми векторами напряжения для активных выпрямителей напряжений 26 первого 24 и второго 25 преобразователей частоты. Вектора в указанной таблице однозначно связаны с соответствующими векторами на третьей плоскости векторов (фиг. 5). Подобные таблицы получили широкое применение в системах прямого управления моментом двигателей, в которых регулируемыми координатами являются потокосцепление статора  и электромагнитный момент двигателя
и электромагнитный момент двигателя  . (см. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. 298 с.).
. (см. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. 298 с.).
В заявляемом устройстве регулируемыми координатами являются активная  и реактивная
и реактивная  составляющие пространственного вектора тока источника питания 2.
составляющие пространственного вектора тока источника питания 2.
Первый столбец таблицы (фиг. 6) указывает номер сектора (от 3.1 до 3.24) на третьей плоскости базовых векторов напряжения (фиг. 5), для которого выбирается базовый вектор напряжения, осуществляющий требуемое регулирование активного и реактивного токов источника питания 2. При этом, как ранее отмечалось, выбранный вектор (фиг. 5) представляет собой комбинацию из двух векторов, где первый из них воздействует на активный выпрямитель 26 первого преобразователя частоты 24, а второй – на активный выпрямитель 26 второго преобразователя частоты 25. Например, для сектора 3.1 (фиг. 5) выбран вектор напряжения «са», расположенный на границе секторов 3.1 и 3.2. В таблице (фиг. 6) этот вектор расположен на пересечении строки с номером сектора 3.1 и третьим столбцом. При этом первый базовый вектор напряжения «с» формирует мгновенное входное напряжение на стороне переменного тока активного выпрямителя 26 первого преобразователя частоты 24, а второй базовый вектор напряжения «а» – мгновенное входное напряжение на стороне переменного тока активного выпрямителя 26 второго преобразователя частоты 25. Таким образом, совместное действие векторов «с» и «а» на соответствующих плоскостях фиг. 4,а и фиг. 4,б, т.е. вектора «са» на плоскости фиг. 5 осуществляют требуемое регулирование активного и реактивного токов источника питания 2.
Отметим, что в 1-ом диапазоне регулирования для формирования мгновенных входных напряжений активных выпрямителя 26 первого 24 и второго 25 преобразователей частоты (в пределах от 0,5 до 0,75 их номинальных значений) участвуют группы коротких базовых векторов (столбцы с номерами 8 и 9) и группы средних базовых векторов (столбцы с номерами 6 и 7).
Во 2-ом диапазоне регулирования для формирования мгновенных входных напряжений активных выпрямителей 26 первого 24 и второго 25 преобразователей частоты (в пределах от 0,75 до 1,0 их номинальных значений) участвуют группы средних базовых векторов (столбцы с номерами 4 и 5) и группы длинных базовых векторов (столбцы с номерами 2 и 3).
Поясним, каким образом осуществляется требуемое регулирование активного и реактивного токов источника питания 2.
На фиг. 7,а приведена упрощенная схема замещения активного выпрямителя напряжения, где - пространственный вектор напряжения источника питания,  - пространственный вектор напряжения на стороне переменного тока активного выпрямителя,
- пространственный вектор напряжения на стороне переменного тока активного выпрямителя,  индуктивность буферного реактора,
индуктивность буферного реактора,  пространственный вектор тока источника питания, он же - ток активного выпрямителя. Указанные вектора напряжений и тока представлены в неподвижной системе координат. Воспользуемся известным и общедоступным методом преобразования мгновенных значений напряжений и токов из неподвижной системы координат во вращающуюся систему координат dq (см. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург. УРО РАН, 2000. 654 с.). Представление переменных в системе dq координат существенно упрощает анализ работы активного выпрямителя. Оси системы координат dq вращаются относительно неподвижных осей системы координат с угловой скоростью ω, определяемой частотой напряжения питающей сети. Примем, что ось d вращающейся системы координат dq (фиг. 7,б) ориентирована по вектору напряжения источника питания . Тогда вектор напряжения сети в этой системе координат будет представлен векторами напряжений
пространственный вектор тока источника питания, он же - ток активного выпрямителя. Указанные вектора напряжений и тока представлены в неподвижной системе координат. Воспользуемся известным и общедоступным методом преобразования мгновенных значений напряжений и токов из неподвижной системы координат во вращающуюся систему координат dq (см. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург. УРО РАН, 2000. 654 с.). Представление переменных в системе dq координат существенно упрощает анализ работы активного выпрямителя. Оси системы координат dq вращаются относительно неподвижных осей системы координат с угловой скоростью ω, определяемой частотой напряжения питающей сети. Примем, что ось d вращающейся системы координат dq (фиг. 7,б) ориентирована по вектору напряжения источника питания . Тогда вектор напряжения сети в этой системе координат будет представлен векторами напряжений  и
и  . Вектор напряжения на стороне переменного тока активного выпрямителя - это один из векторов, изображенных на третьей плоскости векторов (фиг. 5). Во вращающейся системе координат dq вектор будет представлен векторами напряжений
. Вектор напряжения на стороне переменного тока активного выпрямителя - это один из векторов, изображенных на третьей плоскости векторов (фиг. 5). Во вращающейся системе координат dq вектор будет представлен векторами напряжений  и
и  . Вектор тока источника питания
. Вектор тока источника питания  во вращающейся системе координат dq будет представлен векторами тока
во вращающейся системе координат dq будет представлен векторами тока  и
и  , отображающие соответственно активную и реактивную составляющие тока источника питания . Ранее отмечалось, что система управления активным выпрямителем поддерживает его коэффициент мощности практически равный единице, т.е. реактивная составляющая тока должна быть равна нулю
, отображающие соответственно активную и реактивную составляющие тока источника питания . Ранее отмечалось, что система управления активным выпрямителем поддерживает его коэффициент мощности практически равный единице, т.е. реактивная составляющая тока должна быть равна нулю  .
.
Для упрощенной схемы замещения активного выпрямителя напряжения (фиг. 7,а) запишем для вращающейся системы координат dq известные и общедоступные уравнения (см. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург. УРО РАН, 2000. 654 с.):
где  оператор дифференцирования по времени;
оператор дифференцирования по времени;  и
и  слагаемые, учитывающие перекрестное влияние реактивного и активного токов на составляющие токов и . Предварительно примем, что эти влияния незначительные, тогда с учетов изложенного, что
слагаемые, учитывающие перекрестное влияние реактивного и активного токов на составляющие токов и . Предварительно примем, что эти влияния незначительные, тогда с учетов изложенного, что  , вышеприведенные уравнения (1) и (2) можно записать:
, вышеприведенные уравнения (1) и (2) можно записать:
Выполним анализ полученных уравнений.
Из уравнения (3) следует, если вектор напряжения сети  больше составляющей вектора напряжения на стороне переменного тока активного выпрямителя , т.е. разность этих напряжений положительная
больше составляющей вектора напряжения на стороне переменного тока активного выпрямителя , т.е. разность этих напряжений положительная  , то активная составляющая тока источника питания будет увеличиваться.
, то активная составляющая тока источника питания будет увеличиваться.
Заявляемое устройство содержит релейный регулятор активного тока 14 (фиг. 1), который контролирует, чтобы отклонение тока от его заданного значения не превысило допустимых пределов.
При достижении граничных значений по току релейный регулятор 14 выдает команду на смену базового вектора напряжения , составляющая которого больше напряжения сети , т.е.  , следовательно, ток будет уменьшаться. Более подробно работа релейного регулятора активного тока 14 будет описана ниже.
, следовательно, ток будет уменьшаться. Более подробно работа релейного регулятора активного тока 14 будет описана ниже.
Из уравнения (4) следует, если составляющая вектора напряжения на стороне переменной тока активного выпрямителя  , т.е.
, т.е.  , то составляющая тока источника питания будет уменьшаться. Если же
, то составляющая тока источника питания будет уменьшаться. Если же  , т.е.
, т.е.  , то составляющая тока источника питания будет увеличиваться.
, то составляющая тока источника питания будет увеличиваться.
Заявляемое устройство содержит релейный регулятор реактивного тока 15 (фиг. 1), который контролирует, чтобы отклонение реактивного тока от его заданного значения не превысило допустимых пределов. Более подробно работа релейного регулятора реактивного тока 15 будет описана ниже.
На фиг. 7,б показан один из вариантов графической интерпретации вышеописанного анализа, когда , при этом активная составляющая тока уменьшается, т. е.  , (фиг. 7,б)
, (фиг. 7,б)  , при этом реактивная составляющая тока также уменьшается
, при этом реактивная составляющая тока также уменьшается  . Общее количество возможных вариантов динамики изменения токов и равно четырем.
. Общее количество возможных вариантов динамики изменения токов и равно четырем.
На фиг. 7,в и фиг. 7,г показаны графические интерпретации реакции составляющих токов и для сектора с номером 3.1 (фиг. 5) под воздействием четырех базовых векторов напряжений «аа», «са», «аpnаpn» и «bpnаpn».
На основании чего можно сделать следующие выводы.
Первый вывод. Выбор длинных базовых векторов напряжений (фиг. 5 и фиг. 7,в) во 2-ом диапазоне регулирования («аа», «са», «ba» и т.д.) и средних векторов в 1-ом диапазоне регулирования («ааpn», «саpn», «bpna» и т.д.) во всех секторах вызывает уменьшение активной составляющей тока источника питания  . Описанная динамика тока изображена в первой строке таблицы на фиг. 6 для столбцов с номерами 2, 3, 6 и 7.
. Описанная динамика тока изображена в первой строке таблицы на фиг. 6 для столбцов с номерами 2, 3, 6 и 7.
Второй вывод. Выбор средних базовых векторов напряжений (фиг. 5) во 2-ом диапазоне регулирования («ааpn», «саpn», «bpna» и т.д.) и коротких векторов в 1-ом диапазоне регулирования («аpnаpn», «bpnapn» и т.д.) во всех секторах вызывает увеличение активной составляющей тока источника питания  . Описанная динамика тока изображена в первой строке таблицы на фиг. 6 для столбцов с номерами 4, 5, 8 и 9.
. Описанная динамика тока изображена в первой строке таблицы на фиг. 6 для столбцов с номерами 4, 5, 8 и 9.
Введем понятие «отстающий базовый вектор напряжения». Это вектор, расположенный относительно рассматриваемого сектора на границе с предыдущим сектором, в предыдущем секторе или на границе предыдущего сектора и предшествующему ему сектором. Например, отстающими векторами (фиг. 5) для сектора 3.1 являются вектора «аа», «ааpn» и «аpnаpn».
Введем понятие «опережающий базовый вектор напряжения». Это вектор, расположенный относительно рассматриваемого сектора на границе с последующим сектором или на границе последующего и следующего за ним сектором. Например, опережающими векторами для сектора 3.1 (фиг. 5) являются вектора «са» «саpn» и «bpnаpn».
Третий вывод. Выбор отстающих базовых векторов напряжений (фиг. 5) в 1-ом и 2-ом диапазонах регулирования («аа», «ааpn», «аpnаpn» и т. д.) для всех секторов вызывает увеличение реактивной составляющей тока источника питания  . Описанная динамика тока изображена во второй строке таблицы (фиг. 6) для столбцов с четными номерами 2, 4, 6 и 8.
. Описанная динамика тока изображена во второй строке таблицы (фиг. 6) для столбцов с четными номерами 2, 4, 6 и 8.
Четвертый вывод. Выбор опережающих базовых векторов напряжений (фиг. 5) в 1-ом и 2-ом диапазонах регулирования («са» «саpn» и «bpnаpn» и т.д.) для всех секторов вызывает уменьшение реактивной составляющей тока источника питания  . Описанная динамика тока изображена во второй строке таблицы (фиг. 6) для столбцов с нечетными номерами 3, 5, 7 и 9.
. Описанная динамика тока изображена во второй строке таблицы (фиг. 6) для столбцов с нечетными номерами 3, 5, 7 и 9.
Рассмотрим, как влияет слагаемое в уравнении (1), которым мы ранее пренебрегли при анализе динамики изменения активного тока источника питания при перемещении вектора сети в пределах сектора. В процентном отношении доля слагаемого мала по сравнению со слагаемыми и , не более 5 % (фиг. 7,б). Обусловлено это тем, что реактивный ток мал, так как заявляемая система управления стремится уменьшить его до нуля. Однако когда вектора и становятся соизмеримыми между собой, слагаемое в уравнении (1) проявляет свое влияние. Это происходит при переходе из 1-го диапазона регулирования во 2-ой диапазон регулирования и наоборот, т.е. в районе границе диапазонов регулирования.
Известно, что в пределах сектора, угол которого равен 15о, модуль вектора напряжения сети изменяется незначительно (не более 5 %, см. овал на фиг. 5), а модуль вектора напряжения на стороне переменного тока активного выпрямителя изменяется на 3,4 % (уменьшается или увеличивается) для выбранного базового вектора напряжения.
Если алгебраическая сумма напряжений  в пределах сектора меняет свой знак, то это приводит к изменению динамики активного тока . Например, до определенного углового положения вектора сети в процессе его перемещения выполняется условие
в пределах сектора меняет свой знак, то это приводит к изменению динамики активного тока . Например, до определенного углового положения вектора сети в процессе его перемещения выполняется условие  , т.е.
, т.е.  , при этом активный ток будет уменьшаться. После достижения определенного углового положения вектором сети , когда
, при этом активный ток будет уменьшаться. После достижения определенного углового положения вектором сети , когда  , т.е.
, т.е.  , активный ток станет увеличиваться, и наоборот. С учетом изложенного следует, что изменение динамики активного тока происходит при выполнении условия
, активный ток станет увеличиваться, и наоборот. С учетом изложенного следует, что изменение динамики активного тока происходит при выполнении условия  , а не в результате команд, которые формирует релейный регулятор 15 (фиг. 1) при достижении активным током его граничных значений.
, а не в результате команд, которые формирует релейный регулятор 15 (фиг. 1) при достижении активным током его граничных значений.
Таким образом, в пределах 1-го и 2-го диапазонов регулирования слагаемое в уравнении (1) не оказывает существенного влияния на динамику изменения активного тока источника питания при перемещении вектора сети в пределах сектора. Это влияние проявляется лишь при смене диапазонов регулирования 1-го на 2-ой и наоборот. При этом длительности положительной и отрицательной динамик изменения активного тока существенно отличаются, особенно на границах переходов из 1-го во 2-ой диапазоны регулирования и наоборот.
В дальнейшем, сделанный вывод будет подтвержден результатами математического моделирования (осциллограммами) заявляемой системы управления высоковольтным преобразователем частоты выполненной в программной среде Matlab/Simulink.
Рассмотрим, как влияет слагаемое  в уравнении (2), которым мы ранее пренебрегли при анализе динамики изменения реактивного тока источника питания при перемещении вектора напряжения сети в пределах сектора. Ранее было отмечено, что в системе dq координат вектор напряжение сети представлен векторами напряжений и , т.е. в уравнении (2) в его правой части присутствуют два слагаемых и . При этом слагаемое может быть соизмеримым или превышать слагаемое . Обусловлено это тем, что активный ток значительно превышает реактивный ток . При этом напряжение (фиг 7,б) в пределах сектора изменяется в диапазоне от -25 % до +25 % напряжения сети , при перемещении вектора .
в уравнении (2), которым мы ранее пренебрегли при анализе динамики изменения реактивного тока источника питания при перемещении вектора напряжения сети в пределах сектора. Ранее было отмечено, что в системе dq координат вектор напряжение сети представлен векторами напряжений и , т.е. в уравнении (2) в его правой части присутствуют два слагаемых и . При этом слагаемое может быть соизмеримым или превышать слагаемое . Обусловлено это тем, что активный ток значительно превышает реактивный ток . При этом напряжение (фиг 7,б) в пределах сектора изменяется в диапазоне от -25 % до +25 % напряжения сети , при перемещении вектора .
Отметим, что слагаемое  в уравнении (2) всегда создает отрицательную динамику изменения реактивного тока , при
в уравнении (2) всегда создает отрицательную динамику изменения реактивного тока , при  , т.е. в двигательном режиме работы синхронной машины. Поэтому чтобы создать, например, такую же положительную динамику изменения реактивного тока необходимо выполнить два следующих условия и
, т.е. в двигательном режиме работы синхронной машины. Поэтому чтобы создать, например, такую же положительную динамику изменения реактивного тока необходимо выполнить два следующих условия и  . Выполнение первого условия обеспечивают отстающие базовые вектора напряжений (см. ранее сделанный третий вывод). Выполнить второе условие возможно, но не в зоне границ переходов из 1-го во 2-ой диапазон регулирования и наоборот. В указанных зонах, даже при выбранных отстающих базовых векторах напряжений, второе условие не выполняется, так как напряжение
. Выполнение первого условия обеспечивают отстающие базовые вектора напряжений (см. ранее сделанный третий вывод). Выполнить второе условие возможно, но не в зоне границ переходов из 1-го во 2-ой диапазон регулирования и наоборот. В указанных зонах, даже при выбранных отстающих базовых векторах напряжений, второе условие не выполняется, так как напряжение  . При этом отклонение реактивного тока в течение некоторого времени может значительно превышать допустимые значения.
. При этом отклонение реактивного тока в течение некоторого времени может значительно превышать допустимые значения.
В математической модели заявляемого устройства для высоковольтного преобразователя частоты (в среде Matlab/Simulink), чтобы приблизиться к выполнению второго условия (для номинального тока задания 1250 А) был выполнен дополнительный поворот осей dq координат на угол 6о в направление вращения вектора напряжения сети . Это позволило увеличить слагаемого до 36 % и значительно снизить отклонение реактивного тока на границах переходов.
В дальнейшем, сделанный вывод будет подтвержден результатами математического моделирования (осциллограммами) заявляемой системы управления высоковольтным преобразователем частоты, выполненной в программной среде Matlab/Simulink.
Отметим особенность влияний средних базовых векторов напряжений на динамику активного тока .
Когда средние вектора совместно с короткими векторами (фиг. 5) участвуют в формировании мгновенных входных напряжений активных выпрямителей для 1-ого диапазона регулирования ( ), активная составляющая тока уменьшается от действий средних векторов. В таблице (фиг. 6) это отображено в первой строчке для столбцов с номерами 6 и 7.
), активная составляющая тока уменьшается от действий средних векторов. В таблице (фиг. 6) это отображено в первой строчке для столбцов с номерами 6 и 7.
Когда средние вектора совместно с длинными векторами (фиг. 5) участвуют в формировании мгновенных входных напряжений активных выпрямителей для 2-ого диапазона регулирования ( ), активная составляющая тока увеличивается от действий средних векторов. В таблице (фиг. 6) это отображено в первой строчке для столбцов с номерами 4, 5.
), активная составляющая тока увеличивается от действий средних векторов. В таблице (фиг. 6) это отображено в первой строчке для столбцов с номерами 4, 5.
Опишем назначения и работу блоков в системе управления 11 (фиг.1) высоковольтным преобразователем частоты при несимметричном напряжении источника питания 2 в заявляемом устройстве.
Блок вычисления 12 (фиг.1) активной и реактивной составляющих токов источника питания 2 осуществляет преобразование мгновенных значений его токов из неподвижной системы координат во вращающуюся систему координат dq.
Блок 13 фазовой автоподстройки частоты и формирования номера сектора на третьей плоскости базовых векторов по мгновенным значениям напряжений источника питания 2 осуществляет вычисление двух координат.
Первая координата - угловое положение пространственного вектора напряжения источника питания на третьей плоскости базовых векторов. Сигнал, указывающий угловое положение вектора напряжения формируется на первом выходе блока 13 и подается на второй вход блока вычисления 12 активной и реактивной составляющих токов источника питания 2.
Вторая координата - номер сектора на третьей плоскости базовых векторов. Сигнал, указывающий номер сектора, формируется на втором выходе блока 13 и подается на третий вход блока 16 предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты.
Система управления 11 высоковольтным преобразователем частоты при несимметричном напряжении источника питания 2 в заявляемом устройстве (фиг. 1) может быть выполнена на базе специализированного микроконтроллера, имеющего периферийные устройства, процессор, ОЗУ и ПЗУ.
Трехпозиционный релейный регулятор 14 (фиг. 1) активного тока сравнивает заданное значение активного тока ( ) источника питания 2 и его текущее значение тока (). По результатам сравнения формируется команда
) источника питания 2 и его текущее значение тока (). По результатам сравнения формируется команда  (фиг. 8) для активных выпрямителей 26 (фиг. 2) на увеличение или уменьшение текущего активного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования. Двухпозиционный релейный регулятор 15 реактивного тока сравнивает заданное значение тока
(фиг. 8) для активных выпрямителей 26 (фиг. 2) на увеличение или уменьшение текущего активного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования. Двухпозиционный релейный регулятор 15 реактивного тока сравнивает заданное значение тока  и текущее значение тока . По результатам сравнения формируется команда
и текущее значение тока . По результатам сравнения формируется команда  (фиг. 8) для активных выпрямителей 26 на увеличение или уменьшение текущего реактивного тока источника питания 2.
(фиг. 8) для активных выпрямителей 26 на увеличение или уменьшение текущего реактивного тока источника питания 2.
Отметим особенности работы трехпозиционного релейного регулятора 14.
Его структурная схема содержит (фиг. 8,а) блок вычитания 42, первый 43 и второй 44 двухпозиционные релейные регуляторы, блок выбора 45 одной из трех групп векторов, которая увеличивает или уменьшает текущее значение активного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования.
На выходе блока вычитания 42 формируется сигнал рассогласования  , который подается на входы первого 43 и второго 44 релейных регуляторов (фиг. 8,а). Выходные команды регуляторов
, который подается на входы первого 43 и второго 44 релейных регуляторов (фиг. 8,а). Выходные команды регуляторов  и
и  подаются на входы блока выбора группы векторов 45, который выполняет функцию арифметического суммирования. На выходе последнего формируются одна из трех команд. Первая команда
подаются на входы блока выбора группы векторов 45, который выполняет функцию арифметического суммирования. На выходе последнего формируются одна из трех команд. Первая команда  - «выбрать группу коротких векторов», которая будет увеличить текущее значение активного тока (см. фиг. 6). Вторая команда
- «выбрать группу коротких векторов», которая будет увеличить текущее значение активного тока (см. фиг. 6). Вторая команда  - «выбрать группу средних векторов», которая будет уменьшать ток в 1-ом диапазоне регулирования или увеличивать его во 2-ом диапазоне регулирования. Третья команда
- «выбрать группу средних векторов», которая будет уменьшать ток в 1-ом диапазоне регулирования или увеличивать его во 2-ом диапазоне регулирования. Третья команда  - «выбрать группу длинных векторов», которая будет уменьшать текущее значение активного тока .
- «выбрать группу длинных векторов», которая будет уменьшать текущее значение активного тока .
Первый релейный регулятор 43 формирует на своем выходе одну из двух команд  - «работать в 1-ом диапазоне регулирования» или
- «работать в 1-ом диапазоне регулирования» или  - «работать во 2-ом диапазоне регулирования» (фиг. 8,а и 8,б; фиг. 6). При этом порог перехода из 1-го диапазона регулирования во 2-ой диапазон регулирования наступает при выполнении условия
- «работать во 2-ом диапазоне регулирования» (фиг. 8,а и 8,б; фиг. 6). При этом порог перехода из 1-го диапазона регулирования во 2-ой диапазон регулирования наступает при выполнении условия  , а порог перехода из 2-го диапазона регулирования в 1-ый диапазон регулирования наступает при выполнении условия
, а порог перехода из 2-го диапазона регулирования в 1-ый диапазон регулирования наступает при выполнении условия  . Здесь
. Здесь  – зона гистерезиса второго релейного регулятора 44 (рис. 8,а).
– зона гистерезиса второго релейного регулятора 44 (рис. 8,а).
Второй релейный регулятор 44 формирует на своем выходе одну из двух команд  - «увеличить текущее значение активного тока источника питания 2» или
- «увеличить текущее значение активного тока источника питания 2» или  - «уменьшить текущее значение активного тока источника питания 2». При этом порог перехода от команды к команде наступает при выполнении условия
- «уменьшить текущее значение активного тока источника питания 2». При этом порог перехода от команды к команде наступает при выполнении условия  , а порог перехода от команды к команде наступает при выполнении условия
, а порог перехода от команды к команде наступает при выполнении условия  .
.
Например, если текущее значение активного тока меньше заданного значения , а их разница , то на выходе первого релейного регулятора 43 (фиг. 8,а) формируется команда - «работать в 1-ом диапазоне регулирования». При этом на выходе второго релейного регулятора 44 формируется команда - «увеличить текущее значение тока источника питания 2». Под действием указанных команд и на выходе блока 45 формируется команда  - «выбрать вектор из группы коротких векторов
- «выбрать вектор из группы коротких векторов  и увеличить текущее значение активного тока
и увеличить текущее значение активного тока  » (фиг.8,б). Например, для сектора 3.1 (фиг. 5; фиг.6) команды
» (фиг.8,б). Например, для сектора 3.1 (фиг. 5; фиг.6) команды  и можно выполнить, выбирая вектор «apnapn» или «bpnapn», т.е. один из коротких векторов. Ранее был сделан вывод, что выбор коротких векторов, которые расположены в столбцах 8 и 9 таблицы на фиг. 6, вызывает увеличение активной составляющей тока источника питания 2.
и можно выполнить, выбирая вектор «apnapn» или «bpnapn», т.е. один из коротких векторов. Ранее был сделан вывод, что выбор коротких векторов, которые расположены в столбцах 8 и 9 таблицы на фиг. 6, вызывает увеличение активной составляющей тока источника питания 2.
Таким образом, под действием команды текущее значение активного тока увеличивается. Однако когда достигается условие, что , на выходе релейного регулятора 44 формируется команда - «уменьшить текущее значение тока », а на выходе блока 45  - «выбрать вектор из группы средних векторов» (фиг. 8), при этом . Например, для сектора 3.1 (фиг. 5, фиг. 6) команды
- «выбрать вектор из группы средних векторов» (фиг. 8), при этом . Например, для сектора 3.1 (фиг. 5, фиг. 6) команды  , и можно выполнить, выбирая вектор «aapn» или «сapn», т.е. один из средних векторов. Ранее был сделан вывод, что в 1-ом диапазоне регулирования выбор средних векторов, которые расположены в столбцах 6 и 7 таблицы (фиг. 6) вызывает уменьшение активной составляющей тока источника питания 2.
, и можно выполнить, выбирая вектор «aapn» или «сapn», т.е. один из средних векторов. Ранее был сделан вывод, что в 1-ом диапазоне регулирования выбор средних векторов, которые расположены в столбцах 6 и 7 таблицы (фиг. 6) вызывает уменьшение активной составляющей тока источника питания 2.
Под действием команды текущее значение активного тока уменьшается. Когда достигается условие, что , на выходе релейного регулятора 44 формируется команда - «увеличить текущее значение тока », а на выходе блока 45 формируется команда - «выбрать вектор из группы коротких векторов» (фиг. 8). При этом . Таким образом, по командам , и  как и ранее выбираются короткие вектора.
как и ранее выбираются короткие вектора.
Описанный процесс будет повторяться до тех пор, пока вектор напряжения сети находится в пределах 1-го диапазона регулирования. При этом выбранные базовые вектора напряжений (короткие и средние) фиг. 5 поддерживают значение текущего активного тока  в пределах допустимых отклонений
в пределах допустимых отклонений  от заданного значения в 1-ом диапазоне регулирования (фиг. 8,б).
от заданного значения в 1-ом диапазоне регулирования (фиг. 8,б).
Например, для несимметричного напряжения сети , когда конец пространственного вектора , перемещаясь по секторам (фиг. 5) описал овал, будут выбраны короткие и средние вектора, расположенные в секторах с номерами 3.23, 3.24, 3.1, 3.2, а также в секторах с номерами 3.11, 3.12, 3.13 и 3.14.
Если вектор напряжения сети пересекает границу 1-го и 2-го диапазонов регулирования (фиг. 5), то динамика изменения текущего значения активного тока автоматически станет положительной , даже при выбранных средних векторах , которые в 1-ом диапазоне регулирования делали динамику изменения тока отрицательной . На фиг. 5 это происходит в секторах с номерами 3.3 и 3.15.
Обусловлено это тем, что во втором диапазоне регулирования модуль вектора напряжения сети больше длины проекции среднего вектора напряжения на ось  (фиг. 7,б). Тогда из уравнения (3) следует, что отрицательная динамика изменения активного тока в 1-ом диапазоне регулирования от действия средних векторов напряжений (фиг. 8,б) меняется на положительную динамику изменения активного тока во 2-ом диапазоне регулирования.
(фиг. 7,б). Тогда из уравнения (3) следует, что отрицательная динамика изменения активного тока в 1-ом диапазоне регулирования от действия средних векторов напряжений (фиг. 8,б) меняется на положительную динамику изменения активного тока во 2-ом диапазоне регулирования.
С учетом выше изложенного следует, что разница токов  уменьшается. При выполнении условия на выходе первого релейного регулятора 43 (фиг. 8,а) формируется команда - «работать во 2-ом диапазоне регулирования». На выходе второго релейного регулятора 44 сохраняется команда - «уменьшить текущее значение тока источника питания 2», так как . Под действием указанных команд и на выходе блока 45 формируется команда
уменьшается. При выполнении условия на выходе первого релейного регулятора 43 (фиг. 8,а) формируется команда - «работать во 2-ом диапазоне регулирования». На выходе второго релейного регулятора 44 сохраняется команда - «уменьшить текущее значение тока источника питания 2», так как . Под действием указанных команд и на выходе блока 45 формируется команда  - «выбрать вектор из группы длинных векторов
- «выбрать вектор из группы длинных векторов  и уменьшить текущее значение активного тока
и уменьшить текущее значение активного тока  » (фиг. 8,б). Для сектора 3.1 (фиг. 5, фиг.6) команды
» (фиг. 8,б). Для сектора 3.1 (фиг. 5, фиг.6) команды  и можно выполнить, выбирая вектор «aa» или «сa», т.е. один из длинных векторов. Ранее был сделан вывод, что выбор длинных векторов, которые расположены в столбцах 2 и 3 таблицы (фиг. 6), вызывает уменьшение активной составляющей тока источника питания 2.
и можно выполнить, выбирая вектор «aa» или «сa», т.е. один из длинных векторов. Ранее был сделан вывод, что выбор длинных векторов, которые расположены в столбцах 2 и 3 таблицы (фиг. 6), вызывает уменьшение активной составляющей тока источника питания 2.
Таким образом, под действием команды текущее значение активного тока уменьшается. Когда достигается условие, что , на выходе релейного регулятора 44 формируется команда - «увеличить текущее значение тока », а на выходе блока 45 - «выбрать вектор из группы средних векторов» (фиг. 8), при этом . Например, для сектора 3.1 (фиг. 5, фиг.6) команды , и можно выполнить, выбирая вектор «aapn» или «сapn», т.е. один из средних векторов. Ранее был сделан вывод, что выбор средних векторов, которые расположены в столбцах 4 и 5 таблицы (фиг. 6), вызывает увеличение активной составляющей тока источника питания 2.
Под действием команды текущее значение активного тока увеличивается. Когда достигается условие, что , на выходе релейного регулятора 44 формируется команда - «уменьшить текущее значение тока », а на выходе блока 45 - «выбрать вектор из группы длинных векторов» (фиг. 8). При этом . Таким образом, по командам , и  как и ранее выбираются длинные вектора.
как и ранее выбираются длинные вектора.
Описанный процесс будет повторяться до тех пор, пока вектор напряжения сети находится в пределах 2-го диапазона регулирования. При этом выбранные базовые вектора напряжений (длинные и средние) (фиг. 5) поддерживают значение текущего активного тока в пределах допустимых отклонений от заданного значения  во 2-ом диапазоне регулирования (фиг. 8,б).
во 2-ом диапазоне регулирования (фиг. 8,б).
Для ранее указанного несимметричного напряжения сети , когда конец пространственного вектора, перемещаясь по секторам (фиг. 5) описал овал, будут выбраны средние и длинные вектора, расположенные в секторах с номерами 3.4, 3.5, 3.6, 3.7, 3.8, 3.9, а также в секторах с номерами 3.16, 3.17, 3.18, 3.19, 3.20 и 3.21.
Если вектор напряжения сети пересекает границу 2-го и 1-го диапазонов регулирования, то динамика изменения текущего значения активного тока автоматически станет отрицательной , даже при выбранных средних векторах , которые во 2-ом диапазоне регулирования делают динамику изменения тока положительной . На фиг. 5 это происходит в секторах с номерами 3.10 и 3.22.
Обусловлено это тем, что в первом диапазоне регулирования модуль вектора напряжения сети меньше длины проекции среднего вектора напряжения на ось (фиг. 7,б). Тогда из уравнения (3) следует, что положительная динамика изменения активного тока во 2-ом диапазоне регулирования от действия средних векторов напряжений (фиг. 8,б) меняется на отрицательную динамику изменения активного тока в 1-ом диапазоне регулирования.
С учетом выше изложенного следует, что разница токов увеличивается. При выполнении условия на выходе первого релейного регулятора 43 формируется команда - «работать в 1-ом диапазоне регулирования». На выходе второго релейного регулятора 44 сохраняется команда - «увеличить текущее значение тока источника питания 2», так как . Под действием указанных команд и на выходе блока 45 формируется команда - «выбрать вектор из группы коротких векторов и увеличить текущее значение активного тока » (фиг.8,б). Для сектора 3.1 (фиг. 5, фиг.6) команды и можно выполнить, выбирая вектор «apnapn» или «bpnapn», т.е. один из коротких векторов.
Таким образом, работа трехпозиционного релейного регулятора 14 в 1-ом и 2-ом диапазонах регулирования, а также его работа при переходах вектора напряжения сети из 1-го во 2-ой диапазоны регулирования и наоборот описана полностью.
Рассмотрим работу релейного регулятора 15 в пределах 1-го диапазона регулирования входных напряжений активных выпрямителей 26 (фиг. 8,в).
Ранее отмечалось, что для обеспечения единичного значения коэффициента мощности активного выпрямителя необходимо, чтобы заданное значение реактивного тока было равно нулю . При этом текущее значение реактивного тока должно удовлетворять условию  , т.е. ток должен находиться в пределах зоны гистерезиса
, т.е. ток должен находиться в пределах зоны гистерезиса  релейного регулятора 15 (фиг 8,в).
релейного регулятора 15 (фиг 8,в).
Если выполняется условие, что  , то для возвращения значения реактивного тока в пределы зоны гистерезиса на выходе релейного регулятора 15 формируется команда
, то для возвращения значения реактивного тока в пределы зоны гистерезиса на выходе релейного регулятора 15 формируется команда  - «увеличить текущее значение тока источника питания 2». Например, для сектора 3.1 (фиг. 5, фиг.6) команду можно выполнить, выбирая вектор «apnapn» или ««aapn»», т.е. один из отстающих векторов. Ранее был сделан вывод, что выбор отстающих векторов, которые расположены в столбцах 6 и 8 таблицы (фиг. 6), вызывает увеличение реактивной составляющей тока источника питания 2.
- «увеличить текущее значение тока источника питания 2». Например, для сектора 3.1 (фиг. 5, фиг.6) команду можно выполнить, выбирая вектор «apnapn» или ««aapn»», т.е. один из отстающих векторов. Ранее был сделан вывод, что выбор отстающих векторов, которые расположены в столбцах 6 и 8 таблицы (фиг. 6), вызывает увеличение реактивной составляющей тока источника питания 2.
Если выполняется условие, что  , то для возвращения значения реактивного тока в пределы зоны гистерезиса на выходе релейного регулятора 15 формируется команда
, то для возвращения значения реактивного тока в пределы зоны гистерезиса на выходе релейного регулятора 15 формируется команда  - «уменьшить текущее значение тока источника питания 2». Например, для сектора 3.1 (фиг. 5, фиг.6) команду можно выполнить, выбирая вектор «bpnapn» или ««capn»», т.е. один из опережающих векторов. Ранее был сделан вывод, что выбор опережающих векторов, которые расположены в столбцах 7 и 9 таблицы (фиг. 6), вызывает уменьшение реактивной составляющей тока источника питания 2.
- «уменьшить текущее значение тока источника питания 2». Например, для сектора 3.1 (фиг. 5, фиг.6) команду можно выполнить, выбирая вектор «bpnapn» или ««capn»», т.е. один из опережающих векторов. Ранее был сделан вывод, что выбор опережающих векторов, которые расположены в столбцах 7 и 9 таблицы (фиг. 6), вызывает уменьшение реактивной составляющей тока источника питания 2.
Если , т.е. текущий реактивный ток находится в пределах допустимого отклонения от заданного тока  , на выходе релейного регулятора 15 сохраняет свое действие последняя принятая команда .
, на выходе релейного регулятора 15 сохраняет свое действие последняя принятая команда .
По описанному алгоритму работает релейный регулятор 15 и в пределах 2-го диапазона регулирования входных напряжений активных выпрямителей 26.
При этом команду - «уменьшить текущее значение тока источника питания 2» в таблице (фиг. 6) можно выполнить, выбирая вектора в столбцах 3 и 5. Ранее отмечалось, что в этих столбцах расположены опережающие вектора. Команду - «увеличить текущее значение тока источника питания 2» можно выполнить, выбирая в таблице вектора в столбцах 2 и 4 (фиг. 6). Ранее отмечалось, что в этих столбцах расположены отстающие вектора.
Блок предварительного выбора базового вектора напряжения 16 (фиг. 1) для активных выпрямителей 26 (фиг. 2) высоковольтного преобразователя частоты 6 работает в соответствии с таблицей (фиг. 6). Ранее упоминалось, что подобные таблицы получили широкое применение в методе прямого управления моментом двигателей переменного тока. Указанные таблицы еще называют таблицами переключений базовых векторов напряжений, так как они указывают, на то какие вектора следует выбирать для эффективного управления, как инверторами напряжения, так и активными выпрямителями напряжения в высоковольтных преобразователях частоты. Термин «эффективное управление указанными устройствами» предполагает такой выбор базовых векторов напряжений, которые повышают быстродействие устройств и их коэффициент полезного действия.
На первый и второй входы блока 16 (фиг. 1) подаются команды « » и «» с выходов релейных регуляторов 14 и 15. Ранее было описано, что указанные команды выбирают один из столбцов в таблице (фиг. 6) в одной из трех групп векторов: длинные вектора (столбцы с номерами 2, 3); средние вектора (столбцы с номерами 4…7); короткие вектора (столбцы с номерами 8, 9).
» и «» с выходов релейных регуляторов 14 и 15. Ранее было описано, что указанные команды выбирают один из столбцов в таблице (фиг. 6) в одной из трех групп векторов: длинные вектора (столбцы с номерами 2, 3); средние вектора (столбцы с номерами 4…7); короткие вектора (столбцы с номерами 8, 9).
На третий вход блока 16 подается сигнал со второго выхода блока 13, который указывает номер строки в таблице на фиг. 6.
Выбранные столбец и строка в таблице (фиг. 6) указывают предварительный базовый вектор напряжения, который на третьей плоскости базовых векторов (фиг. 5) занимает определенное положение. Ранее отмечалось, что вектора (фиг. 5) получены в результате суммирования специальным образом отобранных векторов (фиг. 4,а, фиг. 4,б).
С учетом изложенного на первом выходе блока 16 формируется команда, которая предварительно указывает, какой базовый вектор напряжения необходимо выбрать на фиг. 4,а. Указанная команда подается на первый вход блока 18 выбора базового вектора напряжения для активного выпрямителя 26 первого преобразователя частоты 24 и формирования управляющих сигналов ключами указанного выпрямителя. Одновременно на второй вход блока 18 подается команда со второго выхода блока вычисления 17. Эта команда указывает, нужна или нет принудительная балансировка напряжений конденсаторов 33, 34 (фиг. 3) в звене постоянного тока 29. Если принудительная балансировка конденсаторов нужна (ранее подробно об этом было описано), то из коротких векторов apn (bpn) выбирается вектор ap или an (bp или bn), который осуществит эту балансировку. Одновременно на третий вход блока 18 (фиг. 1) подается сигнал с выхода блока 20. Этот сигнал указывает, какой базовый вектор напряжения был выбран на предыдущем шаге выбора векторов на первой плоскости векторов на фиг. 4,а.
Блок 18 по полученным трем командам осуществляет окончательный выбор базового вектора напряжения для эффективного управления активным выпрямителем напряжения 26 первого преобразователя частоты 24. При этом выбранный базовый вектор напряжения формируется на первом выходе блока 18 и затем сохраняется в блоке 20.
Отметим, что при окончательном выборе базового вектора напряжения в блоке 18 необходимо выполнить следующие требования: обеспечить минимальное количество переключений ключей в активном выпрямителе напряжения 26 (высокое быстродействие), и если требуется выполнить принудительную балансировку напряжений на конденсаторах 33 и 34 в звене постоянного тока 29.
Выполнение указанных требований подробно описаны авторами в патенте на изобретение № 2662151. В указанном устройстве, минимизация количества переключений ключей и принудительная балансировка напряжений на конденсаторах осуществлены для управления трехфазным трехуровневым инвертором напряжения. Так как силовая схема активного выпрямителя напряжения подобна схеме инвертора напряжения, в заявляемом устройстве описание выполнения указанных требований не приводится.
На втором выходе блока 18 осуществляется формирование управляющих сигналов ключами активного выпрямителя 26 первого преобразователя частоты 24 (фиг. 2). Алгоритм формирования управляющих сигналов также подробно описан в вышеупомянутом патенте на изобретение № 2662151, поэтому в заявляемом устройстве не приводится.
На втором выходе блока 16 формируется команда, которая предварительно указывает, какой базовый вектор напряжения необходимо выбрать на фиг. 4,б. Указанная команда подается на первый вход блока 19 (фиг. 1) выбора базового вектора напряжения для активного выпрямителя 26 второго преобразователя частоты 25 и формирования управляющих сигналов ключами указанного выпрямителя. Одновременно на второй вход блока 19 подается команда со второго выхода блока вычисления 17. Эта команда указывает, нужна или нет принудительная балансировка конденсаторов 33, 34 (фиг. 3) в звене постоянного тока 29. Одновременно на третий вход блока 19 подается сигнал с выхода блока 21. Этот сигнал указывает, какой базовый вектор напряжения был выбран на предыдущем шаге выбора векторов на второй плоскости векторов на фиг. 4,б.
Блок 19 работает подобно блоку 18, т.е. осуществляет выбор оптимального базового вектора напряжения для эффективного управления активным выпрямителем напряжения 26 второго преобразователя частоты 25 (фиг. 2). Выбранный вектор напряжения обеспечивает: минимальное количество переключений ключей в активном выпрямителе напряжения 26 второго преобразователя частоты 25, повышает быстродействие активного выпрямителя напряжения 26, поддерживает балансировку напряжений на двух конденсаторах звена постоянного тока активного выпрямителя напряжения 26.
На втором выходе блока 19 осуществляется формирование управляющих сигналов ключами активного выпрямителя 26 второго преобразователя частоты 25.
Блок вычисления 17 (фиг. 1) заданного значения активного тока и состояния баланса напряжений на конденсаторах звена постоянного тока высоковольтного преобразователя частоты работает следующим образом.
На первый вход указанного блока поступает сигнал, указывающий какое значение напряжения должно быть на двух последовательно соединенных конденсаторах 33 и 34 в звене постоянного тока 29 (фиг. 3). На второй вход блока 17 поступает сигнал, указывающий текущее значение напряжения на обоих конденсаторах и на каждом из них в отдельности. Формирование заданного значения активного тока осуществляется с помощью пропорционально-интегрального (ПИ) регулятора, находящегося внутри блока 17, на входы которого подаются ранее указанные напряжения.
При этом на втором выходе блока 17 (фиг. 1) формируется сигнал, указывающий о необходимости естественной или принудительной балансировки напряжений на конденсаторах 33 и 34 звена постоянного тока 29 (фиг. 3). Ранее было описано, как осуществляется балансировка напряжений на указанных конденсаторах.
Устройство управления высоковольтным преобразователем частоты при кратковременных несимметричных провалах напряжения сети (фиг.1) работает следующим образом.
Блок вычисления 3 определяет величину коэффициента несимметрии напряжений  источника питания 2. Если эта величина не превышает 5 %, то управление высоковольтным преобразователем частоты 6 осуществляет система управления 4 как в прототипе. При этом используется метод ШИМ с удалением восьми выделенных гармоник напряжения и девятью переключениями ключей активного выпрямителя за четверть периода.
источника питания 2. Если эта величина не превышает 5 %, то управление высоковольтным преобразователем частоты 6 осуществляет система управления 4 как в прототипе. При этом используется метод ШИМ с удалением восьми выделенных гармоник напряжения и девятью переключениями ключей активного выпрямителя за четверть периода.
Если величина несимметрии напряжений источника питания 2 более 5 %, то блок вычисления 3 передает управление высоковольтным преобразователем частоты 6 системе управления 11, которая осуществляет релейно-векторное управление ключами двух активных выпрямителей 26 (фиг. 2). Ранее была подробно, описана работа каждого блока системы управления 11.
На фиг. 9, фиг. 10 приведены осциллограммы, поясняющие работу заявляемого устройства управления трехфазными трехуровневыми активными выпрямителями напряжения 26 высоковольтного преобразователя частоты 6.
Осциллограммы получены в результате моделирования в программной среде Matlab/Simulink и дают наглядное представление о работе релейно-векторного управления указанными выпрямителями при кратковременных несимметричных провалах напряжения сети. В качестве объекта управления принят частотно-регулируемый синхронный электропривод клети непрерывного прокатного стана. Здесь: а – мгновенные значения фазных напряжения источника питания 2; б – мгновенные значения фазных токи источника питания 2; в – заданное  и текущее значения активной составляющей тока источника питания 2; г – заданное
и текущее значения активной составляющей тока источника питания 2; г – заданное  и текущее значения реактивной составляющей тока источника питания 2; д – команда для активных выпрямителей 26 на увеличение или уменьшение текущего активного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования; е – команда
и текущее значения реактивной составляющей тока источника питания 2; д – команда для активных выпрямителей 26 на увеличение или уменьшение текущего активного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования; е – команда  для активных выпрямителей 26 на увеличение или уменьшение текущего реактивного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования; ж – выбранный базовый вектор напряжения для эффективного управления активным выпрямителем напряжения 26 первого преобразователя частоты 24, который сформирован на первом выходе блока 18; и – выбранный базовый вектор напряжения для эффективного управления активным выпрямителем напряжения 26 второго преобразователя частоты 25, который сформирован на первом выходе блока 19.
для активных выпрямителей 26 на увеличение или уменьшение текущего реактивного тока источника питания 2 в 1-ом или 2-ом диапазонах регулирования; ж – выбранный базовый вектор напряжения для эффективного управления активным выпрямителем напряжения 26 первого преобразователя частоты 24, который сформирован на первом выходе блока 18; и – выбранный базовый вектор напряжения для эффективного управления активным выпрямителем напряжения 26 второго преобразователя частоты 25, который сформирован на первом выходе блока 19.
На осциллограммах (фиг. 9, фиг. 10), которые отображают пять периодов сетевого напряжения от 0 до 0,1 с можно выделить три временных интервала.
Первый временной интервал  , когда напряжение сети симметричное, а заданное значение активной составляющей тока источника питания 2 равно нулю (
, когда напряжение сети симметричное, а заданное значение активной составляющей тока источника питания 2 равно нулю ( ).
).
Второй временной интервал  , когда напряжение сети симметричное, а заданное значение активной составляющей тока источника питания 2 равно .
, когда напряжение сети симметричное, а заданное значение активной составляющей тока источника питания 2 равно .
Третий временной интервал  , когда напряжение сети несимметричное, а заданное значение активной составляющей тока источника питания 2 равно .
, когда напряжение сети несимметричное, а заданное значение активной составляющей тока источника питания 2 равно .
Заметим, что во всех трех временных интервалах работала система управления высоковольтным преобразователем частоты 11 (фиг. 1), которая фактически должна была включиться только на третьем временном интервале, при кратковременных несимметричных провалах напряжения сети.
На фиг. 9,а в момент времени  в фазе А произошел провал напряжения на 40 %, при этом в фазах В и С напряжения номинальные
в фазе А произошел провал напряжения на 40 %, при этом в фазах В и С напряжения номинальные  .
.
На фиг. 9,б на первом временном интервале значения фазных токов источника питания 2 равны нулю, так как . При этом отклонение мгновенных фазных значений токов источника питания 2 достигает 85 А, что обусловлено работой релейных регуляторов активного 14 и реактивного 15 токов.
На фиг. 9,б на втором временном интервале и на третьем временном интервале действующие значения фазных токов источника питания 2 равны номинальным значениям 600 А, при . Наличие отклонений тока (высокочастотных колебаний тока) на фоне основных гармоник фазных токов источника питания 2 достигает 85 А, что обусловлено работой релейных регуляторов активного 14 и реактивного 15 токов. При этом коэффициент несинусоидальности токов на втором и третьем временных интервалах не превышает соответственно 5 % и 10 %, что является допустимым значением.
Отметим, что в момент времени  ток задания изменился скачком от 0 А до 1250 А, при этом время переходного процесса изменения мгновенных значений фазных токов источника питания 2 составляет
ток задания изменился скачком от 0 А до 1250 А, при этом время переходного процесса изменения мгновенных значений фазных токов источника питания 2 составляет  (фиг. 9,б). Такое высокое быстродействие заявляемой системы управления высоковольтным преобразователем частоты свидетельствует о его достоинстве.
(фиг. 9,б). Такое высокое быстродействие заявляемой системы управления высоковольтным преобразователем частоты свидетельствует о его достоинстве.
Ранее было указано, что в момент времени произошел провал напряжения в фазе А на 40 %, при этом осциллограммы фазных токов источника питания 2 (фиг. 9,б) на третьем и втором временных интервалах практически одинаковы. Заявляемая система управления высоковольтным преобразователем частоты отработала указанный провал напряжения практически мгновенно, о чем свидетельствуют осциллограммы токов, на которых отсутствуют заметные провалы или всплески токов после момента времени . Указанное поведение токов подтверждает высокую надежность и высокое быстродействие заявляемой системы управления высоковольтным преобразователем частоты.
На фиг. 9,в приведены осциллограмма заданного и текущего значения активной составляющей тока и источника питания 2. Ранее было указано, что указанные токи подаются на второй и первый входы релейного регулятора активного тока 14 (фиг. 1). На первом временном интервале ток , а мгновенное значение текущего тока изменяется в диапазоне  , так как работает система управления 11. На втором и третьем временных интервалах
, так как работает система управления 11. На втором и третьем временных интервалах  ток , а мгновенное значение текущего тока изменяется в диапазоне 1165
ток , а мгновенное значение текущего тока изменяется в диапазоне 1165 . При этом на первом и втором временных интервалах, когда напряжение сети симметричное, динамика изменения активного тока относительно тока имеет практически линейный характер (фиг. 9,в) в рамках ширины зоны гистерезиса релейного регулятора 14, а период высокочастотных колебаний тока относительно тока остается практически постоянным.
. При этом на первом и втором временных интервалах, когда напряжение сети симметричное, динамика изменения активного тока относительно тока имеет практически линейный характер (фиг. 9,в) в рамках ширины зоны гистерезиса релейного регулятора 14, а период высокочастотных колебаний тока относительно тока остается практически постоянным.
На третьем временном интервале, когда напряжение сети несимметричное динамика изменения активного тока относительно тока имеет интервалы времени с линейным характером, а также интервалы времени с нелинейным характером. Интервалы времени с линейным характером имеют место, когда напряжение сети (см. точки овала на фиг. 5) находится за пределами зоны перехода из первого диапазона регулирования во второй диапазон регулирования и наоборот. Ранее об особенностях указанного интервала времени упоминалось, что при этом влияние слагаемого в уравнение (1) не проявлялось. Период колебаний высокочастотной составляющей тока относительно тока для указанного интервала времени (фиг. 9,в) остается практически постоянным.
Интервалы времени с нелинейным характером имеют место, когда напряжение сети (см. точки овала на фиг. 5) находится в зоне перехода из первого диапазона регулирования во второй диапазон регулирования и наоборот. Ранее об особенностях указанного интервала времени тоже отмечалось, при этом ощутимое влияние в уравнении (1) оказывает слагаемое . Период колебаний высокочастотной составляющей тока относительно тока для указанного интервала времени (фиг. 9,в) не остается постоянным.
На фиг. 9,г приведена осциллограмма текущего значения реактивной составляющей тока источника питания 2. Напомним, заданное значение реактивной составляющей тока источника питания 2 должно быть равно нулю  . Ранее было указано, что указанные токи подаются на первый и второй входы релейного регулятора реактивного тока 15 (фиг. 1). На первом и втором временных интервалах
. Ранее было указано, что указанные токи подаются на первый и второй входы релейного регулятора реактивного тока 15 (фиг. 1). На первом и втором временных интервалах  мгновенное значение текущего тока изменяется в диапазоне
мгновенное значение текущего тока изменяется в диапазоне  , так как работает система управления 11 (фиг. 1). При этом на первом и втором временных интервалах, когда напряжение сети симметричное, динамика изменения реактивного тока относительно тока имеет практически линейный характер (фиг. 9,г), а период колебаний тока остается практически постоянным.
, так как работает система управления 11 (фиг. 1). При этом на первом и втором временных интервалах, когда напряжение сети симметричное, динамика изменения реактивного тока относительно тока имеет практически линейный характер (фиг. 9,г), а период колебаний тока остается практически постоянным.
На третьем временном интервале  мгновенное значение тока , также должно изменяться в диапазоне: (фиг. 9,г). Однако, вследствие существенного влияния слагаемого в уравнение (2), текущее значение реактивной составляющей тока источника питания 2 в отдельные моменты времени выход за граничные значения, достигая -200 А и +140 А, т.е. превышает в 2,4 и 1,6 раз граничные значения. Ранее о влиянии слагаемого уже упоминалось. Указанные нарушения граничных значений токов в релейном регуляторе реактивного тока 15 происходят соответственно при переходе из второго диапазона регулирования в первый диапазон регулирования и наоборот. В процессе работы заявляемого устройства длительность во времени указанных нарушений граничных значений токов составляет около 20 %. Учитывая, что доля составляющей тока в сетевом токе источника питания 2 незначительная, не более 16 %, то в мгновенных значениях фазных токов указанные нарушения существенно не проявляются. Полученный вывод подтверждается осциллограммами токов на фиг. 9,б, где явно отсутствуют существенные провалы или всплески токов. Однако коэффициент несинусоидальности токов на третьем временном интервале увеличивается до 10 %, что является допустимым значением, при этом на втором временном интервале указанный коэффициент составлял 5 %.
мгновенное значение тока , также должно изменяться в диапазоне: (фиг. 9,г). Однако, вследствие существенного влияния слагаемого в уравнение (2), текущее значение реактивной составляющей тока источника питания 2 в отдельные моменты времени выход за граничные значения, достигая -200 А и +140 А, т.е. превышает в 2,4 и 1,6 раз граничные значения. Ранее о влиянии слагаемого уже упоминалось. Указанные нарушения граничных значений токов в релейном регуляторе реактивного тока 15 происходят соответственно при переходе из второго диапазона регулирования в первый диапазон регулирования и наоборот. В процессе работы заявляемого устройства длительность во времени указанных нарушений граничных значений токов составляет около 20 %. Учитывая, что доля составляющей тока в сетевом токе источника питания 2 незначительная, не более 16 %, то в мгновенных значениях фазных токов указанные нарушения существенно не проявляются. Полученный вывод подтверждается осциллограммами токов на фиг. 9,б, где явно отсутствуют существенные провалы или всплески токов. Однако коэффициент несинусоидальности токов на третьем временном интервале увеличивается до 10 %, что является допустимым значением, при этом на втором временном интервале указанный коэффициент составлял 5 %.
На фиг. 10,д приведена осциллограмма, которая отображает команду, сформированную на выходе трехпозиционного релейного регулятора 14: - «выбрать вектор из группы длинных векторов»; - «выбрать вектор из группы средних векторов»; - «выбрать вектор из группы коротких векторов». Ранее было указано, что эти команды подаются на первый вход блока 16 (фиг. 1).
На первом и втором временных интервалах , когда напряжение сети симметричное, выбираются длинные и средние вектора, т.е. регулирование мгновенных входных напряжений активных выпрямителей 26 первого 24 и второго 25 преобразователей частоты (в пределах от 0,75 до 1,0 их номинальных значений) осуществляется во 2-ом диапазоне регулирования.
Исключение составляет интервал времени  , когда выбирается короткий вектор, чтобы отработать скачкообразное изменение заданного значения активного тока от 0 А до 1250 А. При этом фазные токи источника питания 2 за время переходного процесса (фиг. 9,б) достигают установившихся значений.
, когда выбирается короткий вектор, чтобы отработать скачкообразное изменение заданного значения активного тока от 0 А до 1250 А. При этом фазные токи источника питания 2 за время переходного процесса (фиг. 9,б) достигают установившихся значений.
На третьем временном интервале  , когда напряжение сети несимметричное, на осциллограмме (фиг. 10,д) имеют место временные интервалы, когда группа из длинных и средних векторов (2-ой диапазон регулирования) меняется на группу из средних и коротких векторов (1-ый диапазон регулирования) и наоборот. Ранее об этом было подробно описано, когда пояснялась работа трехпозиционного релейного регулятора активного тока 14 (фиг. 8).
, когда напряжение сети несимметричное, на осциллограмме (фиг. 10,д) имеют место временные интервалы, когда группа из длинных и средних векторов (2-ой диапазон регулирования) меняется на группу из средних и коротких векторов (1-ый диапазон регулирования) и наоборот. Ранее об этом было подробно описано, когда пояснялась работа трехпозиционного релейного регулятора активного тока 14 (фиг. 8).
Анализ осциллограммы на фиг. 10,д показывает, что при провале напряжения в фазе А на 40 % в заявляемом устройстве было выбрано 8 длинных, 8 средних векторов и 5 коротких, 5 средних векторов за полупериод напряжения сети, чтобы обеспечить заданное значение активной составляющей тока источника питания 2. При этом продолжительности удержания выбранных векторов не одинаковы, особенно при приближении к границе смены диапазонов регулирования, о чем ранее упоминалось.
На фиг. 10,е приведена осциллограмма, которая отображает какая команда сформирована на выходе двухпозиционного релейного регулятора 15 (фиг. 1): - «увеличить текущее значение реактивного тока источника питания 2», (фиг. 8,в) - «уменьшить текущее значение реактивного тока источника питания 2». Ранее было указано, что эти команды подаются на второй вход блока 16 (фиг. 1).
На первом и втором временных интервалах , когда напряжение сети симметричное, продолжительности удержания выбранной команды или существенно не меняются. Однако анализ осциллограммы на фиг. 10,е показывает, что при ранее указанном провале напряжения (40 %) продолжительность удержания выбранной команды или существенно зависит от углового положения вектора напряжения сети на третьей плоскости (см. овал на фиг. 5).
В зоне смены 1-го диапазона регулирования на 2-ой диапазон регулирования преобладает длительность команды - «уменьшить текущее значение реактивного тока источника питания 2» (фиг. 10,е). Ранее упоминалось, что команда выбрана, чтобы удержать текущее значение реактивного тока источника питания 2 в заданных границах регулирования, вследствие заметного влияния слагаемого в уравнении (2).
В зоне смены 2-го диапазона регулирования на 1-ый диапазон регулирования существенно преобладает длительность команды - «увеличить текущее значение реактивного тока источника питания 2». Ранее упоминалось, что команда выбрана, чтобы удержать текущее значение реактивного тока источника питания 2 в заданных границах регулирования, вследствие заметного влияния слагаемого в уравнении (2).
На фиг. 10,ж приведена осциллограмма, которая указывает выбранный базовый вектор напряжения для эффективного управления активным выпрямителем напряжения 26 в первом преобразователе частоты 24, который сформирован на первом выходе блока 18.
Ранее было указано, что на втором выходе блока 18 (фиг. 1) выбранные базовые вектора напряжений осуществляют формирование управляющих сигналов ключами активного выпрямителя 26 первого преобразователя частоты 24.
На фиг. 10,и приведена осциллограмма, которая указывает выбранный базовый вектор напряжения для эффективного управления активным выпрямителем напряжения 26 во втором преобразователе частоты 25, который сформирован на первом выходе блока 19.
Ранее было указано, что на втором выходе блока 19 (фиг. 1) выбранные базовые вектора напряжений осуществляют формирование управляющих сигналов ключами активного выпрямителя 26 второго преобразователя частоты 25.
Таким образом, сформированные управляющие сигналы на вторых выходах блоков 18 и 19 являются выходными сигналами системы управления 11 высоковольтным преобразователем частоты при несимметричном напряжении источника питания. Указанные сигналы подаются на первый и второй управляющие входы высоковольтного преобразователя частоты 6.
На основании выше изложенного следует, что в заявляемом устройстве релейно-векторное управление ключами трехфазных трехуровневых активных выпрямителей напряжений высоковольтного преобразователя частоты обеспечивает высокое быстродействие электропривода и его устойчивость к возмущениям со стороны питающей сети, особенно при кратковременных несимметричных провалах напряжения сети. При этом отклонения мгновенных значений токов источника питания и напряжений на конденсаторах звена постоянного тока не превышают допустимых значений.
Большое значение в заявляемом устройстве имеет предложенная структура таблицы переключений ключей активных выпрямителей напряжения, которая разработана исходя из условий минимального количества переключений ключей в указанных выпрямителях; повышения быстродействия заявляемой системы управления; поддержания баланса напряжений на двух конденсаторах звена постоянного тока активных выпрямителей напряжения. Благодаря минимизации количества переключений ключей в активных выпрямителях напряжения и повышения их быстродействия повышается коэффициент полезного действия высоковольтного преобразователя частоты.
Кроме того, заявляемое устройство обеспечивает высокий коэффициент мощности, практически равный единице, удовлетворительный гармонический состав входных токов, даже при кратковременных несимметричных провалах напряжения сети.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления высоковольтным преобразователем частоты | 2018 |
|
RU2682164C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРЕХФАЗНЫМИ ТРЕХУРОВНЕВЫМИ АКТИВНЫМИ ВЫПРЯМИТЕЛЯМИ НАПРЯЖЕНИЯ | 2020 |
|
RU2734554C1 |
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| Устройство прямого управления моментом синхронного двигателя | 2017 |
|
RU2662151C1 |
| Устройство управления высоковольтным преобразователем частоты с активным выпрямителем | 2022 |
|
RU2793193C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОУРОВНЕВЫМ АКТИВНЫМ ФИЛЬТРОМ | 2020 |
|
RU2741061C1 |
| ТРЕХФАЗНЫЙ АКТИВНЫЙ ВЫПРЯМИТЕЛЬ | 2011 |
|
RU2467462C1 |
| СИСТЕМА УПРАВЛЕНИЯ РЕЖИМОМ НАПРЯЖЕНИЙ В РАСПРЕДЕЛИТЕЛЬНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 2019 |
|
RU2715731C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА В РАСПРЕДЕЛИТЕЛЬНОЙ СЕТИ ПЕРЕМЕННОГО ТОКА | 2021 |
|
RU2767178C1 |
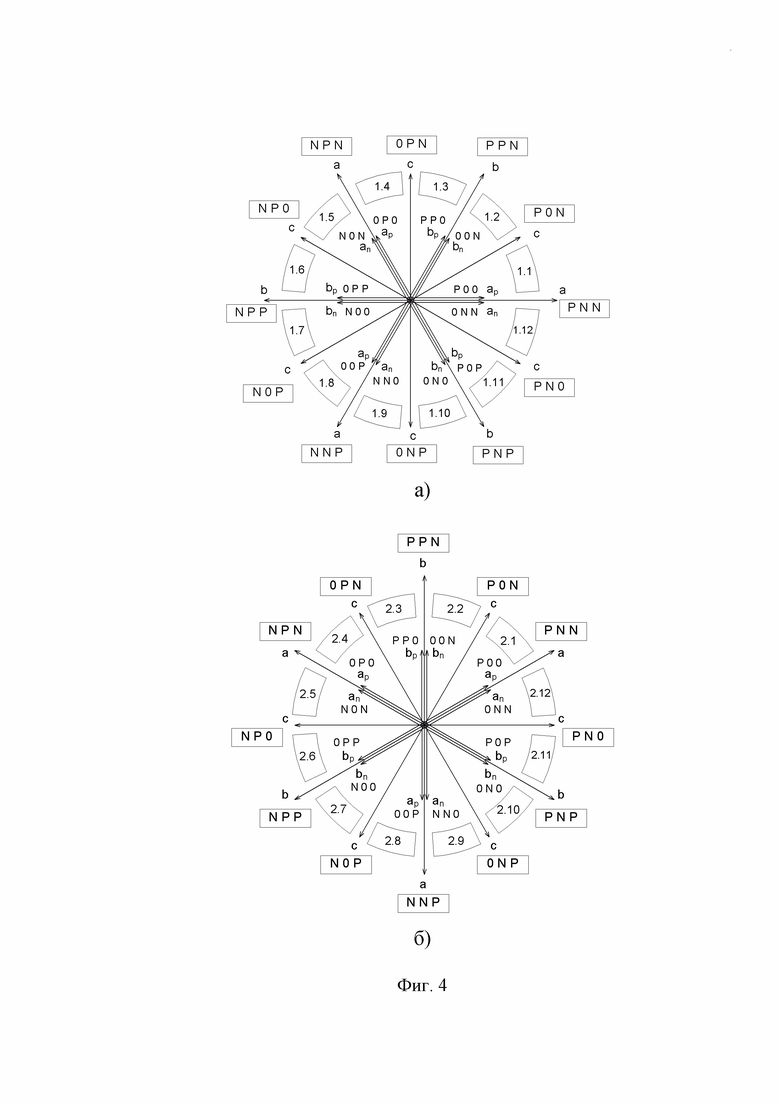
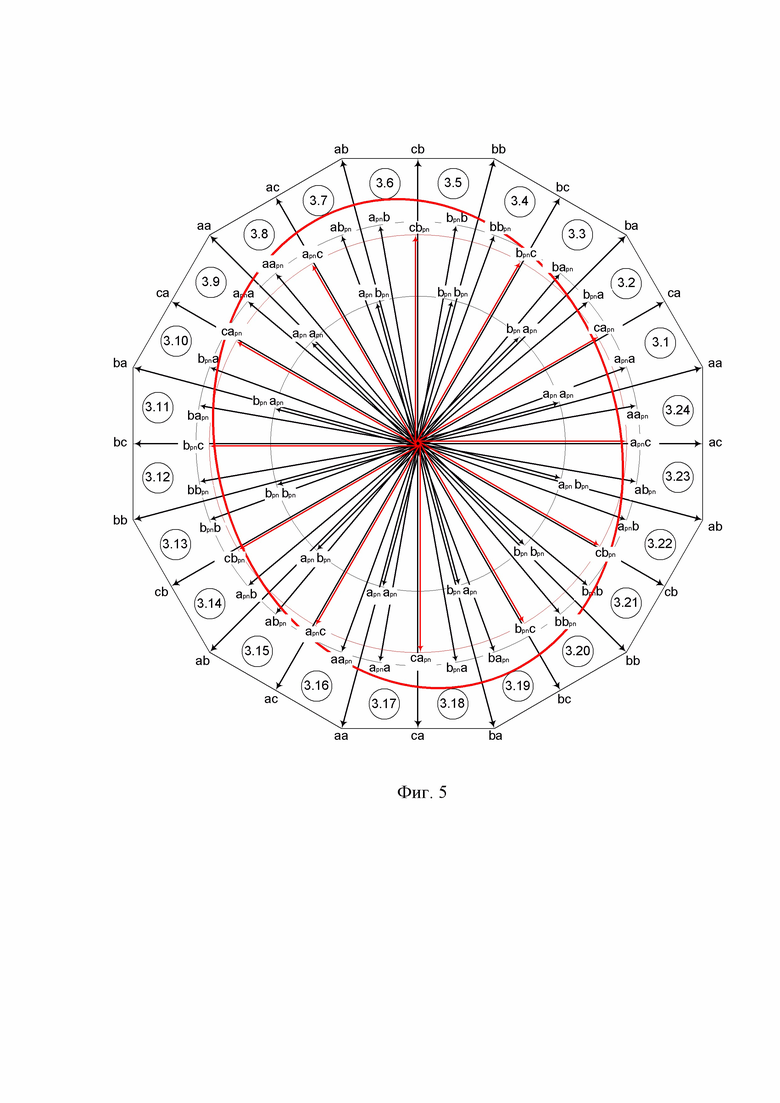
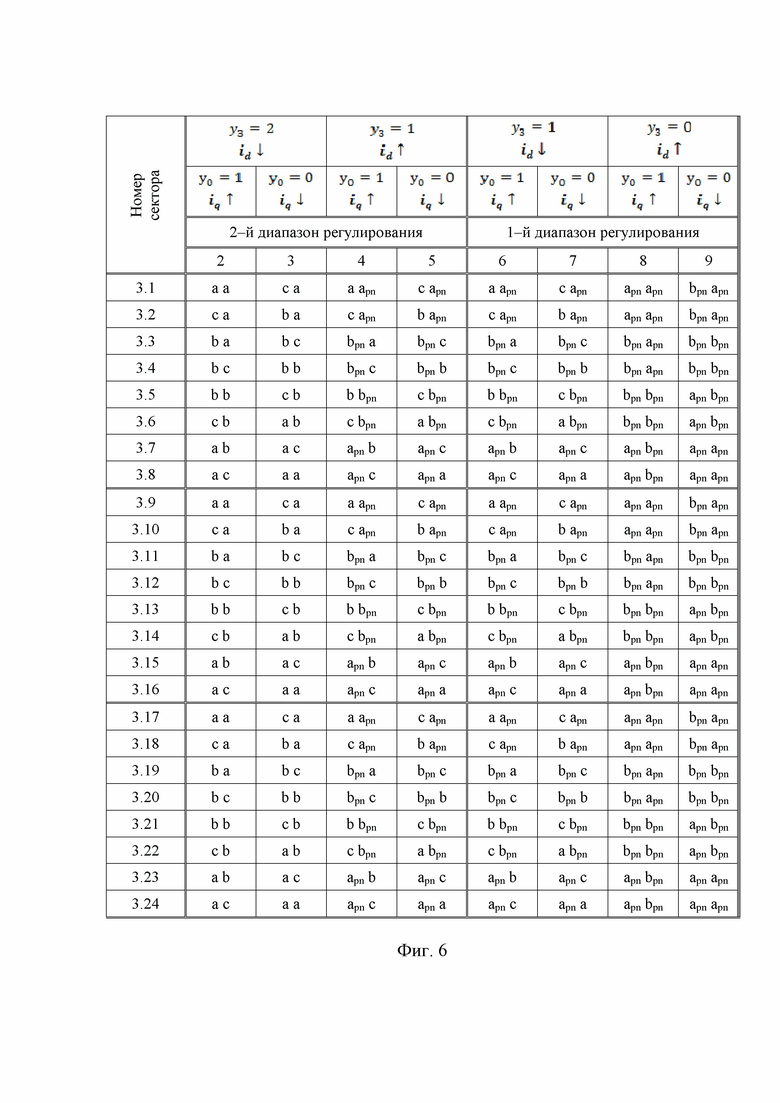
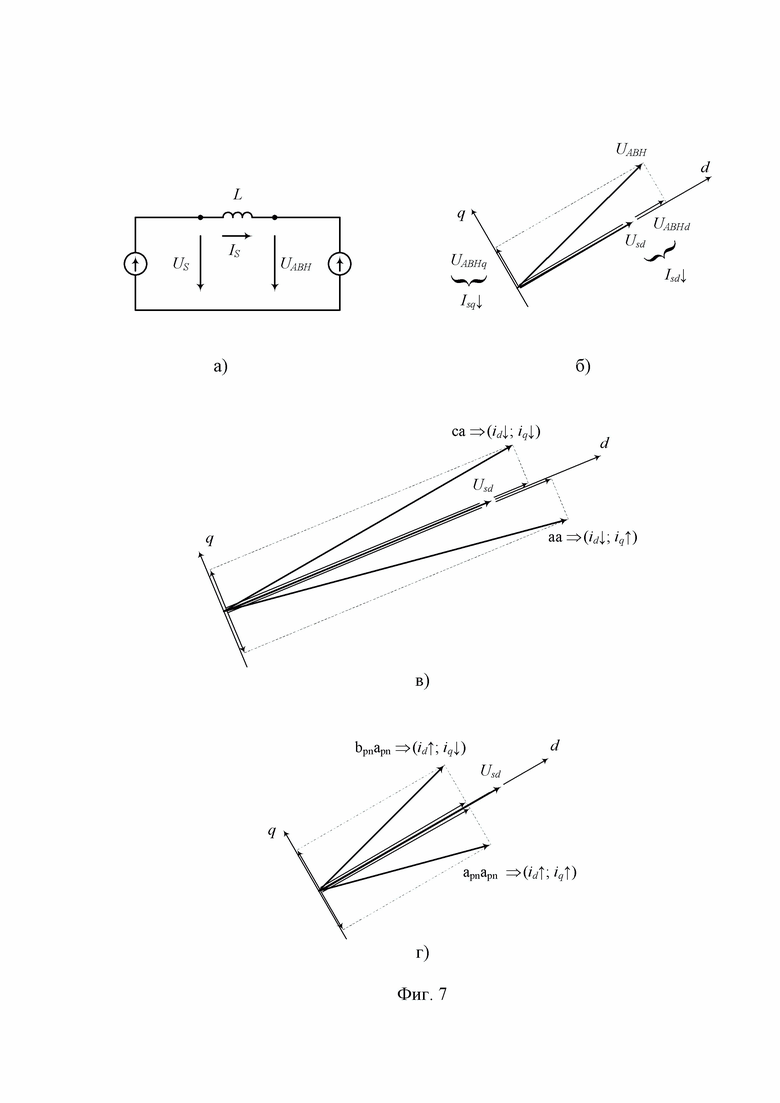
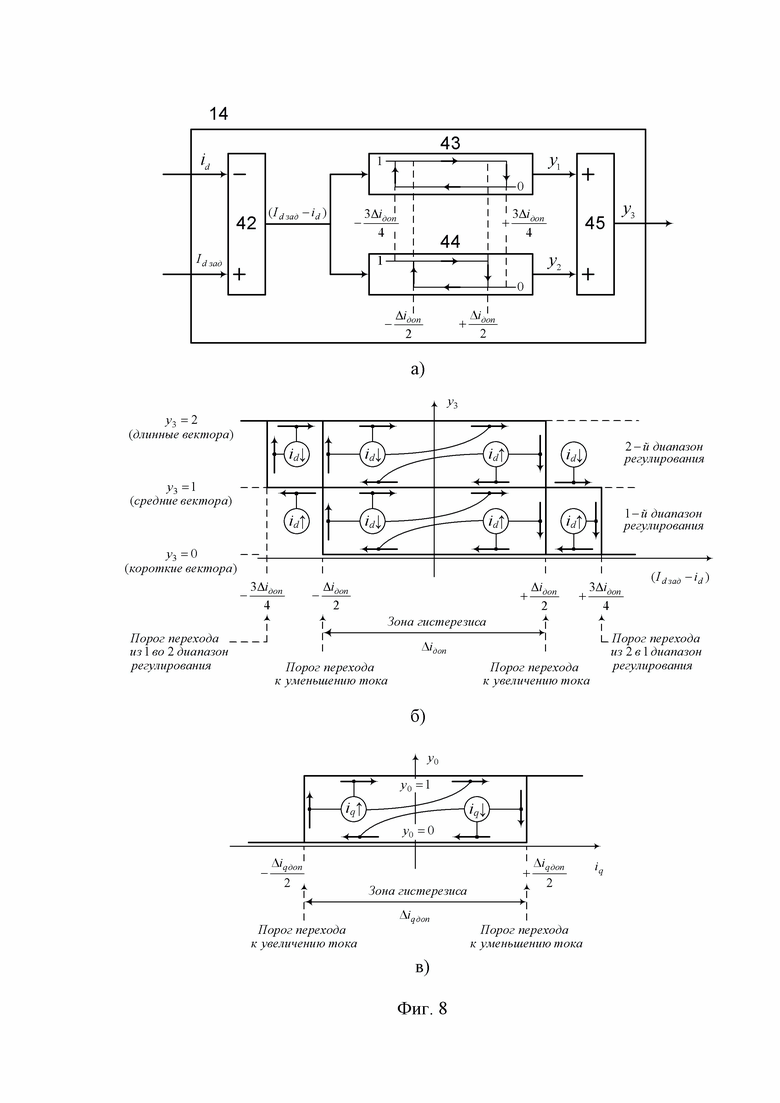
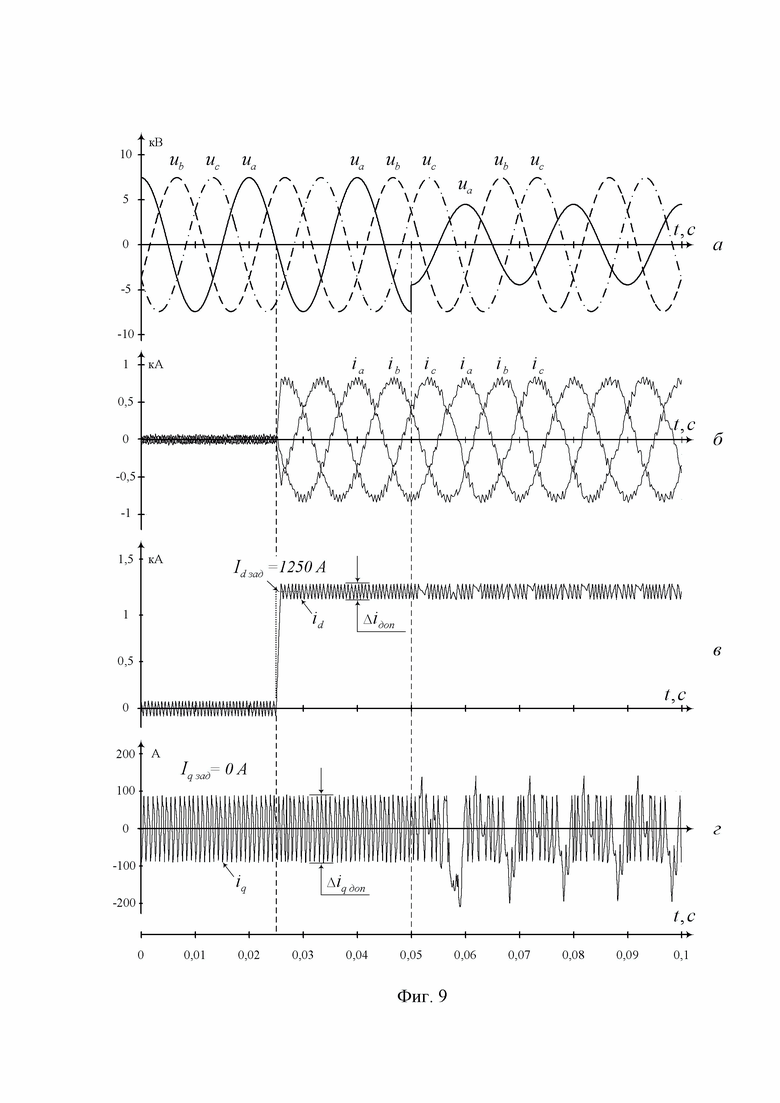
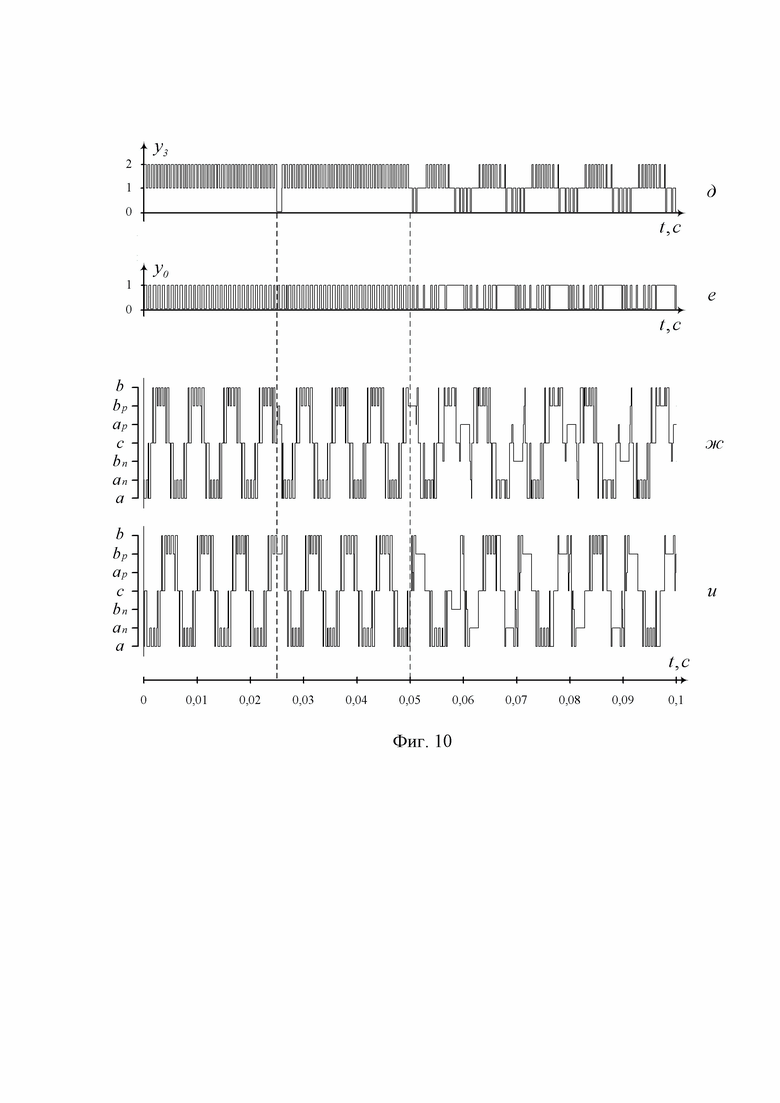
Изобретение относится к области электротехники и может быть использовано для управления трехфазным трехуровневым активным выпрямителем высоковольтного преобразователя частоты, система управления которого при кратковременных несимметричных провалах напряжения сети переключает режим работы ключей активного выпрямителя с широтно-импульсного способа управления на релейно-векторное управление. Техническим результатом является повышение надежности и быстродействия работы трехфазных трехуровневых активных выпрямителей при кратковременных несимметричных провалах напряжения источника питания. Устройство снабжено системой управления высоковольтным преобразователем частоты 11 при несимметричном напряжении источника питания. Указанная система содержит: блок (12) вычисления активной и реактивной составляющих токов источника питания; блок (13) фазовой автоподстройки частоты и формирования номера сектора; релейные регуляторы (14, 15) активного и реактивного токов; блок (16) предварительного выбора базового вектора напряжения активных выпрямителей; блок (17) вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах звена постоянного тока; блоки (18, 19) выбора базовых векторов напряжения для активных выпрямителей напряжения первого и второго преобразователей частоты и формирования управляющих сигналов ключами указанных выпрямителей; блоки (20, 21) хранения своих предыдущих значений базовых векторов напряжений. Устройство обеспечивает повышение надежности и быстродействия работы трехфазных трехуровневых активных выпрямителей высоковольтного преобразователя частоты при кратковременных несимметричных провалах напряжения источника питания. Кроме того, устройство обеспечивает высокий коэффициент мощности, практически синусоидальную форму тока, потребляемую из сети. 10 ил.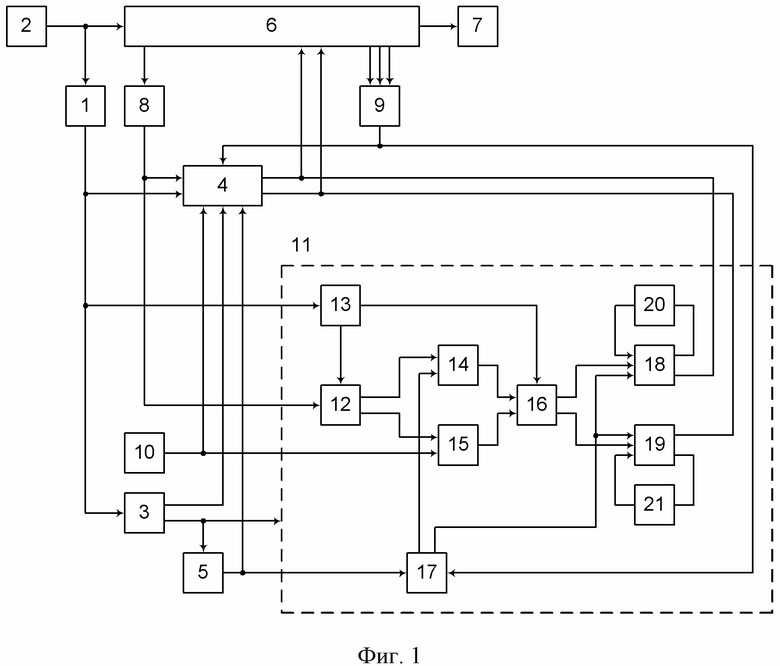
Устройство управления высоковольтным преобразователем частоты, содержащее датчик напряжения источника питания, вход которого подключен к выходу трехфазного источника питания, а выход – к блоку вычисления несимметрии напряжения источника питания, первый выход которого соединен с первым входом системы управления преобразователем частоты при симметричном напряжении источника питания, а второй выход – с задатчиком напряжения звена постоянного тока, выход которого соединен со вторым входом указанной системы управления преобразователем частоты, первый и второй выходы указанной системы управления соединены соответственно с первым и вторым управляющими входами высоковольтного преобразователя частоты, силовой вход которого подключен к источнику питания, а силовой выход – к синхронной машине, к первому информационному выходу высоковольтного преобразователя частоты через датчик тока источника питания подключен третий вход системы управления преобразователем частоты, четвертый вход указанной системы управления подключен к выходу датчика напряжения источника питания, а пятый вход – к выходу датчика напряжения звена постоянного тока, три входа которого подключены ко второму, третьему и четвертому информационным выходам высоковольтного преобразователя частоты, шестой вход системы управления преобразователем частоты при симметричном напряжении источника питания подключен к задатчику реактивного тока, согласно изобретению оно снабжено системой управления высоковольтным преобразователем частоты при несимметричном напряжении источника питания, включающей блок вычисления активной и реактивной составляющих токов источника питания, первый вход которого соединен с выходом датчика тока источника питания, а второй вход - с первым выходом блока фазовой автоподстройки частоты и формирования номера сектора на третьей плоскости базовых векторов, вход указанного блока соединен с выходом датчика напряжения источника питания, первый и второй выходы блока вычисления активной и реактивной составляющих токов соединены соответственно с первыми входами релейного регулятора активного тока и релейного регулятора реактивного тока, выходы которых соединены соответственно с первым и вторым входами блока предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты, третий вход блока предварительного выбора базового вектора напряжения соединен со вторым выходом блока фазовой автоподстройки частоты и формирования номера сектора на третьей плоскости базовых векторов, при этом второй вход релейного регулятора активного тока соединен с первым выходом блока вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах звена постоянного тока высоковольтного преобразователя частоты, первый вход указанного блока вычисления соединен с выходом задатчика напряжения звена постоянного тока, при этом второй вход релейного регулятора реактивного тока соединен с выходом задатчика реактивного тока, первый выход блока предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты соединен с первым входом блока выбора базового вектора напряжения для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя, второй выход блока предварительного выбора базового вектора напряжения активных выпрямителей высоковольтного преобразователя частоты соединен с первым входом блока выбора базового вектора напряжения для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя, вторые входы указанных блоков выбора базового вектора напряжения соединены со вторым выходом блока вычисления заданного значения активного тока и состояния баланса напряжений на конденсаторах звена постоянного тока высоковольтного преобразователя частоты, второй вход указанного блока вычисления соединен с выходом датчика напряжения звена постоянного тока, первый выход блока выбора базового вектора напряжения для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя через блок хранения своего предыдущего значения базового вектора напряжения соединен со своим третьим входом, при этом второй выход блока выбора базового вектора напряжения для активного выпрямителя напряжения первого преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя соединен с первым управляющим входом высоковольтного преобразователя частоты, первый выход блока выбора базового вектора напряжения для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя через блок хранения своего предыдущего значения базового вектора напряжения соединен со своим третьим входом, при этом второй выход блока выбора базового вектора напряжения для активного выпрямителя напряжения второго преобразователя частоты и формирования управляющих сигналов ключами указанного выпрямителя соединен со вторым управляющим входом высоковольтного преобразователя частоты.
| ВЫСОКОВОЛЬТНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2505918C2 |
| 0 |
|
SU157682A1 | |
| JP 5503810 B2, 06.08.2014 | |||
| US 9484833 B2, 01.11.2016 | |||
| WO 2016069791 A1, 06.05.2016 | |||
| CN 103117556 B, 25.11.2015. | |||

