Изобретение относится к области электротехники и может быть использовано для управления трехфазным трехуровневым инвертором напряжения, система управления которого использует метод прямого управления моментом двигателя.
Известно устройство для прямого самоуправления асинхронным двигателем (патент RU №34286, опубл. 27.11.2003), которое включает задатчик момента, задатчик потокосцепления, блок-формирователь напряжений с датчиком напряжения, блок-формирователь токов с двумя датчиками тока, блок-формирователь момента и блок-формирователь потокосцепления, преобразователь координат, два сумматора, три релейных регулятора, блок-селектор импульсов. Блок-селектора импульсов подключены к инвертору напряжения, который подключен к источнику питания. В одну из фаз обмотки включен датчик тока. Пара выходов блока-формирователя токов подключена к блоку формирователя момента и потокосцепления. Два других блока формирователя потокосцепления подключены к блоку формирователя напряжений, который подключен к блоку формирователя момента и преобразователя координат. Три выхода преобразователя координат подключены к входам первого релейного регулятора, два других входа которого подключены к задатчику потокосцепления.
Недостатком устройства является наличие трех релейных регулятора, что приводит к невысокому быстродействию двигателя.
Известно устройство прямого управления скоростью двигателя переменного тока (патент RU №2336624, опубл. 20.10.2008), которое представляет собой комплексную систему, включающую в себя преобразователь частоты и напряжения с двумя входами и переменный токовый двигатель. На выходном валу двигателя установлены датчик скорости и датчик механического момента. Основным отличием данного устройства является наличие блока формирования вектора обратной связи, представляющего собой сумму сигналов скорости ПТ двигателя и его механического момента с коэффициентами, настроенными так, что передаточная функция вектора обратной связи не содержит колебательных звеньев на всех частотах питающего напряжения и скоростях двигателя. Этот вектор обратной связи подается на инвертирующий вход регулятора скорости с высоким коэффициентом усиления.
Недостатком является наличие блока выбора векторов, который составлен без учета минимизации количества переключений ключей инвертора, что приводит к уменьшению коэффициента полезного действия трехфазного трехуровневого инвертора напряжения.
Известно устройство управления двигателем постоянного тока (патент RU № 2375811, опубл. 10.12.2009), которое представляет собой систему электроэнергетического обеспечения, включающую источник питания, фильтр, инвертор и наличие первой и второй обмоток импульсного трансформатора, каждая из которых состоит из двух одинаковых частей. Устройство включает четыре силовых ключа, два емкостных накопителя и блок управления нагрузкой. Первые и вторые выводы обмоток трансформатора соединены с первыми силовыми выводами первого, второго, третьего и четвертого ключей. Второй вывод нагрузки соединен с первыми силовыми выводами пятого и шестого ключей. Вторые выводы последних ключей соединены со средними выводами первой и второй обмоток трансформатора, которые также соединены с первыми силовыми выводами первого и второго двухсторонних ключей. Управляющие выводы первого, второго, третьего, четвертого, пятого и шестого ключей соединены с соответствующими выходами первого драйвера.
Недостатком устройства является наличие первой и второй обмоток импульсного трансформатора приводит к уменьшению коэффициента полезного действия двигателя.
Известно устройство управления трехфазным активным выпрямителем напряжения (патент RU №161102, опубл. 03.07.2015), которое включает в себя датчики тока и напряжения источника питания, а также датчик выпрямленного напряжения. Широтно-импульсный модулятор, задатчик выпрямленного напряжения и задатчик реактивного тока источника питания также присутствуют. Система управления включает блок выделения симметричных составляющих напряжений прямой и обратной последовательностей в кривой напряжения источника питания. Также присутствуют блок фазовой автоподстройки частоты, блок преобразования токов источника питания из неподвижной системы координат (ABC) во вращающуюся систему координат (d-q), блок пропорционально-интегральных регуляторов активной и реактивной составляющих тока источника питания, блок преобразования управляющих напряжений прямой последовательности из вращающейся системы координат (d-q) в неподвижную систему координат (α-β).
Недостатком устройства является наличие широтно-импульсного модулятора, задатчика выпрямленного напряжения и реактивного тока источника питания, что приводит к увеличением гармоники искажения отдельных фазных токов активных выпрямителей и значительным колебанием напряжения звена постоянного тока.
Известно устройство управления высоковольтным преобразователем частоты (патент RU № 157682, опубл. 10.12.2015), которое включает в себя датчик напряжения источника питания, трехфазный источник питания, блок вычисления несимметрии напряжения, высоковольтный преобразователь и его система управления, задатчик напряжения звена постоянного тока и синхронная машина. Первый оптико-волоконный выход высоковольтного преобразователя через датчик тока источника питания подключен к третьему входу системы управления преобразователем частоты. Четвертый вход системы управления подключен к выходу датчика напряжения источника питания, а пятый вход - к выходу датчика напряжения звена постоянного тока. Три входа последнего соединены с вторым, третьим и четвертым информационными выходами высоковольтного преобразователя частоты. Шестой вход системы управления преобразователем частоты при симметричном напряжении источника питания подключен к задатчику реактивного тока.
Недостатком известного устройства является наличие высоковольтного преобразователя, что приводит к увеличению гармоники искажения фазных токов и значительным колебанием напряжения звена постоянного тока.
Известно устройство прямого управления моментом синхронного двигателя (патент RU № 2662151, опубл. 24.07.2018), принятый за прототип, которое включает блок задания скорости вращения, блок формирования заданного потокосцепления и электромагнитного момента, релейные регуляторы потокосцепления и электромагнитного момента, блок предварительного выбора базового вектора напряжения, блок формирования сигналов управления инвертором напряжения, трехфазный трехуровневый инвертор, датчики тока и напряжения, датчик углового положения ротора, датчик скорости. Блок соответствия двух групп базовых векторов напряжений, блок выбора базовых векторов напряжения и релейный регулятор балансировки напряжения обеспечивают управление силовой частью системы, гарантируя стабильность и точность управления.
Недостатком известного устройства является наличие блока предварительного выбора базового вектора напряжения и блока формирования заданного потокосцепления и электромагнитного момента, что приводит к уменьшению коэффициента полезного действия трехфазного трехуровневого автономного инвертора напряжения при выборе базовых векторов напряжений.
Техническим результатом является повышение точности и скорости реакции системы управления моментом асинхронного двигателя.
Технический результат достигается тем, что дополнительно установлены блок задания потокосцепления статора, выход которого соединен с первым входом блока регулирования потокосцепления статора, а второй вход с первым выходом блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора, блок выбора вектора напряжения соединен с выходом двухпозиционного релейного регулятора потокосцепления статора, вход которого соединен с выходом блока регулирования потокосцепления статора, второй вход блок выбора вектора напряжения соединен с выходом семипозиционного релейного регулятора момента, вход которого соединен с выходом блока регулирования момента, третий вход блока выбора вектора напряжения соединен с третьим выходом блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора.
Устройство поясняется следующей фигурой:
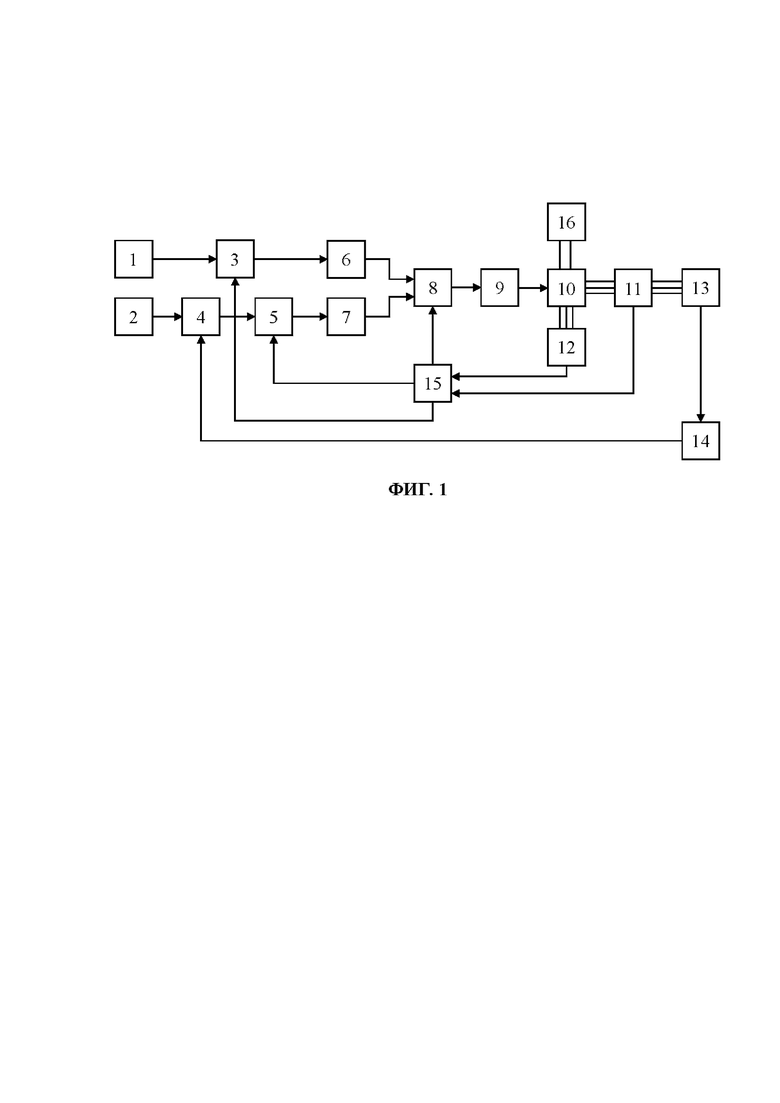
фиг. 1 - функциональная схема устройства, где:
1 - блок задания потокосцепления статора;
2 - блок задания скорости вращения;
3 - блок регулирования потокосцепления статора;
4 - блок регулирования скорости вращения;
5 - блок регулирования момента;
6 - двухпозиционный релейный регулятор потокосцепления статора;
7 - семипозиционный релейный регулятор момента;
8 - блок выбора вектора напряжения;
9 - блок формирования сигналов управления ключами инвертора;
10 - трехфазный трехуровневый автономный инвертор NPC;
11 - датчик тока;
12 - датчик выходного фазного напряжения инвертора;
13 - асинхронный двигатель;
14 - датчик скорости вращения двигателя;
15 - блок вычисления текущих значений потокосцепления статора, момента и угол положения ротора;
16 - источник постоянного тока.
Устройство прямого управления моментом асинхронного двигателя на основе трехфазного трехуровневого автономного инвертора NPC содержит блок задания потокосцепления статора 1 (фиг. 1), выход которого соединен через оптико-волоконный кабель с первым входом блока регулирования потокосцепления статора 3, а второй вход через оптико-волоконный кабель с первым выходом блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15. Выход блока задания скорости вращения 2 соединен через оптико-волоконный кабель с первым входом блока регулирования скорости вращения 4, а второй вход через оптико-волоконный кабель соединен с датчиком скорости вращения двигателя 14. Выход блока регулирования скорости вращения 4 соединен через оптико-волоконный кабель с первым входом блока регулирования момента 5, второй вход которого соединен через оптико-волоконный кабель со вторым выходом блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15. Первый вход блок выбора вектора напряжения 8 соединен через оптико-волоконный кабель с выходом двухпозиционного релейного регулятора потокосцепления статора 6, вход которого соединен через оптико-волоконный кабель с выходом блока регулирования потокосцепления статора 3. Второй вход блок выбора вектора напряжения 8 соединен через оптико-волоконный кабель с выходом семипозиционного релейного регулятора момента 7, вход которого соединен через оптико-волоконный кабель с выходом блока регулирования момента 5. Третий вход блока выбора вектора напряжения 8 соединен через оптико-волоконный кабель с третьим выходом блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15. Выход блока выбора вектора напряжения 8 соединен через оптико-волоконный кабель с входом блока формирования сигналов управления ключами инвертора 9, выход которого соединен через оптико-волоконный кабель с информационным входом трехфазного трехуровневого автономного инвертора NPC 10, электрический вход которого подключается через электрический кабель к источнику постоянного тока 16. Электрический выход трехфазного трехуровневого автономного инвертора NPC 10 соединен через электрический кабель с электрическим входом датчика тока 14, электрический выход которого соединен через электрический кабель с асинхронным двигателем 13. Информационный выход датчика тока 11 соединен через оптико-волоконный кабель с первым входом блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15, второй выход которого соединен через оптико-волоконный кабель с информационным выходом датчика выходного фазного напряжения инвертора 12.
Устройство прямого управления моментом асинхронного двигателя на основе трехфазного трехуровневого автономного инвертора NPC работает следующим образом. Блок вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15 по сигналам с датчика тока 11 и датчика выходного фазного напряжения инвертора 12 формирует три выходных сигнала.
На первом выходе блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15 формируется сигнал текущего значения потокосцепления статора Ys, который подается на второй вход блока регулирования потокосцепления статора 3, а на первый вход которого подается сигнал от блока задания потокосцепления статора 1. Выходной сигнал блока регулирования потокосцепления статора подается на входе двухпозиционного релейного регулятора потокосцепления статора 6, где формируется команда dYs на увеличение или уменьшения текущего значения потокосцепления статора Ys. Указанная команда подается на первый вход блока выбора вектора напряжения 8.
На втором выходе блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15 формируется сигнал текущего значения момента M, который подается на второй входе блока регулирования момента 5. На выходе блока регулирования скорости вращения 4 после сравнения текущего, которое получает от датчика скорости вращения 14, и заданного значений скорости вращения, которое получает от блока задания скорости вращения 2, формируется задание момента, которое подается на первый вход блока регулирования момента 5. Выходной сигнал блока регулирования момента после сравнения значений с первого и второго входов поступает на вход семипозиционного релейного регулятора момента 7, где формируется команда dM на увеличение или уменьшения текущего момента M. Указанная команда подается на второй вход блока выбора вектора напряжения 8. Семипозиционный релейный регулятор момента 7 позволяет повысить точность управления моментом асинхронного двигателя.
На третьем выходе блока вычисления текущих значений потокосцепления статора, момента и угол положения ротора 15 формируется сигнал текущего угла положения ротора. Указанная команда подается на третий вход блока выбора вектора напряжения 8.
Блок выбора вектора напряжения 8 по трем выше приведенным командам определяется вектор напряжения, сигнал которого подается на вход блока формирования сигналов управления ключами инвертора 9, где формируется команда для управления трехфазного трехуровневого автономного инвертора NPC 10. Трехфазный трехуровневый автономный инвертор NPC 10, который питается от источника постоянного тока 16, по указанной команде формируется выходное напряжение для управления асинхронного двигателя 13 в соответствии с заданием скорости вращения. Блок выбора вектора напряжения 8 позволяет повысить скорости реакции системы управления моментом асинхронного двигателя.
Устройство прямого управления моментом асинхронного двигателя на основе трехфазного трехуровневого автономного инвертора NPC за счет установки блока задания потокосцепления статора, семипозиционного релейного регулятора момента и блока выбора вектора по трем командам позволяет повысить точность и скорость реакции системы управления моментом асинхронного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство прямого управления моментом синхронного двигателя | 2017 |
|
RU2662151C1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2023 |
|
RU2819147C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
Изобретение относится к области электротехники и может быть использовано для управления трехфазным трехуровневым инвертором напряжения, система управления которого использует метод прямого управления моментом двигателя. Техническим результатом является повышение точности и скорости реакции системы управления моментом асинхронного двигателя. Устройство прямого управления моментом асинхронного двигателя на основе трехфазного трехуровневого автономного инвертора NPC за счет установки блока задания потокосцепления статора, семипозиционного релейного регулятора момента и блока выбора вектора по трем командам позволяет повысить точность и скорость реакции системы управления моментом асинхронного двигателя. 1 ил.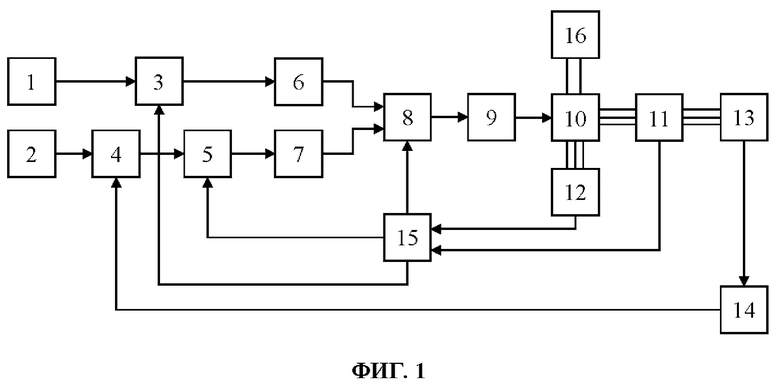
Устройство прямого управления моментом асинхронного двигателя на основе трехфазного трехуровневого автономного инвертора NPC, содержащее блок задания скорости вращения, выход которого соединен с первым входом блока регулирования скорости вращения, блок формирования сигналов управления ключами инвертора, выход которого соединен с управляющим входом трехфазного трехуровневого инвертора напряжения, электрический вход которого подключен к источнику постоянного напряжения, а электрический выход инвертора напряжения через датчик тока подключен к асинхронному двигателю, причем информационный выход трехфазного трехуровневого инвертора напряжения подключен к датчику выходного фазного напряжения инвертора, а выходы вышеуказанных двух датчиков подключены соответственно к первому и второму входам блока вычисления текущих значений потокосцепления статора, момента и угла положения ротора, двигатель оснащен датчиком скорости, выход которого соединен со вторым входом блока регулирования скорости вращения, отличающееся тем, что дополнительно установлены блок задания потокосцепления статора, выход которого соединен с первым входом блока регулирования потокосцепления статора, а второй вход с первым выходом блока вычисления текущих значений потокосцепления статора, момента и угла положения ротора, блок выбора вектора напряжения соединен с выходом двухпозиционного релейного регулятора потокосцепления статора, вход которого соединен с выходом блока регулирования потокосцепления статора, второй вход блока выбора вектора напряжения соединен с выходом семипозиционного релейного регулятора момента, вход которого соединен с выходом блока регулирования момента, третий вход блока выбора вектора напряжения соединен с третьим выходом блока вычисления текущих значений потокосцепления статора, момента и угла положения ротора.
| Устройство прямого управления моментом синхронного двигателя | 2017 |
|
RU2662151C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2306666C1 |
| Устройство для управления моментом синхронного двигателя | 1988 |
|
SU1527700A1 |
| 0 |
|
SU159869A1 | |
| CN 104167968 A, 26.11.2014 | |||
| CN 111181457 A, 19.05.2020. | |||

