Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе асинхронных электродвигателей, и может быть использовано в прецизионных быстродействующих электроприводах, например в электроприводах, устанавливаемых в механизмах подвижных грузоподъемных кранов, в запорной арматуре трубопроводного транспорта, в современных металлорежущих станках с ЧПУ и других технических объектах, использующих современные энергоресурсосберегающие технологи.
Известен асинхронный электропривод с обратной связью по угловой скорости ротора двигателя [1] - Поздеев А.А. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. - Чебоксары: Из-во Чуваш. ун-та, 1998. - 172 с., (стр.51, рис.3.9 - аналог), в котором для регулирования скорости электродвигателя принят частотно-токовый векторный способ управления с косвенной ориентацией по полю. В состав данного электропривода входят функционально связанные преобразователь частоты (автономный инвертор напряжения), датчики фазных токов электродвигателя, датчик скорости ротора электродвигателя, ПИ-регуляторы скорости вращения, потоковой и моментной составляющих тока статора, блок задания скольжения и координатные преобразователи из вращающейся системы координат в неподвижную и из неподвижной во вращающуюся, обеспечивающие выработку синусоидальных сигналов и ориентацию тока статора по вектору потокосцепления ротора. Известная система привода позволяет обеспечить независимое управление потоком и электромагнитным моментом асинхронного электродвигателя, однако в ней не обеспечивается точная ориентация системы координат в различных режимах работы. В процессе функционирования электропривода проявляется взаимовлияние работы каналов регулирования токов и скорости и, как следствие, не обеспечивается требуемое качество регулирования момента в динамических и статических режимах работы, структура системы управления не исключает бросков тока в переходных режимах. При этом статические и динамические характеристики привода падают [2] - Глазенко Т.А., Герман-Галкин С.Г., Полищук С.Б., Рыдов В.А. Частотно-регулируемые асинхронные электропривода для станков с ЧПУ. - Л., ДЦНТП, 1988. - 28 с., ил.
Наиболее близким к предлагаемому изобретению является регулируемый асинхронный электропривод [3] - Патент на изобретение №2313894, МПК Н02Р 21/12, 27/08, Частотно-регулируемый асинхронный электропривод. Сидоров П.Г., Александров Е.В., Лагун В.В., приоритет изобретения 19.06.2006 г., который выбран в качестве прототипа. Электропривод содержит силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертором напряжения, управляющие входы которого соединены с выходами блока векторной ШИМ, асинхронный электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, а выходной вал к датчику скорости вращения его ротора и к передаточному механизму, задатчик текущей угловой скорости электродвигателя, подключенный к первому входу регулятора частоты вращения, ко второму входу которого подключен выход датчика скорости вращения ротора, задатчик потокосцепления электродвигателя, подключенный через масштабный усилитель к первому входу регулятора реактивного тока, выход которого подключен к первому входу координатного преобразователя напряжений, ко второму входу которого подключен регулятор активного тока, выходы координатного преобразователя напряжений подключены ко входам блока векторной ШИМ, координатный преобразователь токов, соединенный входами к выходам блока датчиков фазных токов, а выходами со вторым входом регулятора реактивного тока и с первым входом регулятора активного тока, блок деления и наблюдательный блок состояния привода, снабженный первым и вторым масштабными усилителями, апериодическим звеном, делителем, интегратором и сумматором, при этом выход первого масштабного усилителя подключен к первому входу делителя, выход которого через интегратор подключен к первому входу сумматора, ко второму входу которого подключен выход второго масштабного усилителя, выход сумматора подключен к одному из входов блока векторной ШИМ, к входу координатного преобразователя токов и к входу координатного преобразователя напряжений, выход апериодического звена соединен со вторым входом делителя и вторым входом блока деления, ко второму входу которого подключен выход регулятора частоты вращения, выход блока деления подключен ко второму входу регулятора активного тока и ко входу первого масштабного усилителя, а датчик скорости вращения ротора электродвигателя выполнен в виде импульсного датчика угловых перемещений с двумя выходами, первый из которых является выходом углового положения ротора электродвигателя, а второй - выходом скорости вращения ротора электродвигателя, при этом первый выход импульсного датчика соединен с входом второго масштабного усилителя.
В указанном частотно-регулируемом электроприводе текущее угловое положение потокосцепления вычисляется не по фактическим значениям токов статора, а по их заданным значениям, а задание момента двигателя формируется по фактическому значению потокосцепления ротора двигателя. Такое построение системы управления улучшает динамические показатели привода и повышает надежность работы преобразователя. Однако система управления этого электропривода не обеспечивает полное использование возможностей, заложенных в асинхронном электродвигателе, а именно, работу привода с максимальными (форсированными) моментами Ммах=(2.0-3.0)Мном в диапазоне скоростей вращения ротора электродвигателя от нуля до номинальной и с максимальной мощностью в диапазоне скоростей от ΩНом до 1.5Ωном. Надежная работа электропривода с форсированными режимами работы исполнительного электродвигателя по моменту и скорости позволяет уменьшить номинальную мощность электродвигателя и привода в целом, уменьшает габаритно-массовые характеристики привода, механической трансмиссии, позволяет внедрить в современное промышленное оборудование энергоресурсосберегающие технологии.
Задачей предлагаемого изобретения является обеспечение работы электропривода с форсированными режимами работы исполнительного электродвигателя по моменту в два - три раза относительно номинального значения и скорости до 1.5Ωном при обеспечении надежной работы силового блока преобразователя частоты асинхронного электропривода.
Решение поставленной задачи достигается тем, что в частотно-регулируемый асинхронный электропривод, содержащий силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертор напряжения, управляющие входы которого соединены с выходами блока векторной ШИМ, асинхронный электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, а выходной вал к датчику скорости вращения его ротора и к передаточному механизму, задатчик текущей угловой скорости электродвигателя, задатчик потокосцепления электродвигателя, последовательно соединенные регулятор частоты вращения, ко второму входу которого подключен выход датчика скорости вращения ротора, и первый блок деления, регуляторы активного и реактивного тока, координатный преобразователь напряжений, выходы которого подключены к входам блока векторной ШИМ, координатный преобразователь токов, соединенный входами к выходам блока датчиков фазных токов, а выходами со вторым входом регулятора реактивного тока и с первым входом регулятора активного тока, наблюдательный блок состояния электропривода, снабженный первым и вторым масштабными усилителями, апериодическим звеном, делителем, первым интегратором и первым сумматором, при этом выход первого масштабного усилителя подключен к первому входу делителя, выход которого через первый интегратор подключен к первому входу первого сумматора, ко второму входу которого подключен выход второго масштабного штабного усилителя, выход первого сумматора подключен к одному из входов блока векторной ШИМ, к входу координатного преобразователя токов и к входу координатного преобразователя напряжений, выход апериодического звена соединен со вторым входам делителя и вторым входом первого блока деления, а датчик скорости вращения ротора электродвигателя выполнен в виде импульсного датчика с двумя выходами, первый из которых является выходом углового положения ротора электродвигателя, а второй - выходом скорости вращения ротора электродвигателя, при этом первый выход импульсного датчика соединен с входом второго масштабного усилителя, введены последовательно соединенные первый функциональный преобразователь, первый и второй вход которого соединены соответственно с выходом задатчика потокосцепления и вторым выходом импульсного датчика, первый перемножитель, регулятор потокосцепления, второй вход которого соединен с выходом апериодического звена, и первый блок ограничения, выход которого подключен к первому входу регулятора реактивного тока и входу апериодического звена, второй функциональный преобразователь, выход которого подключен к второму входу первого перемножителя, последовательно соединенные второй блок ограничения, к входу которого подключен регулятор реактивного тока, и второй сумматор, последовательно соединенные третий блок ограничения, к входу которого подключен регулятор активного тока, и третий сумматор, блок ограничения напряжения, к первому и второму входу которого подключены соответственно второй и третий сумматоры, а выходы блока ограничения напряжения подключены ко входам координатного преобразователя напряжений, блок коррекции, первый, второй, третий и четвертый входы которого подключены соответственно к первому и второму выходу координатного преобразователя токов, ко второму выходу импульсного датчика и выходу апериодического звена, а первый и второй выходы соответственно к вторым входам второго и третьего сумматоров, последовательно соединенные первый релейный элемент, вход которого подключен к выходу задатчика потокосцепления, и логический сумматор, второй релейный элемент, вход которого подключен к выходу апериодического звена, а выход - ко второму входу логического сумматора, последовательно соединенные коммутатор и задатчик интенсивности, выход которого подключен к первому входу регулятора частоты вращения электродвигателя, а также четвертый блок ограничения, вход которого подключен к выходу первого блока деления, а выход - к второму входу регулятора активного тока и входу первого масштабного усилителя, при этом управляющий вход коммутатора соединен с выходом логического сумматора.
Первый функциональный преобразователь содержит последовательно соединенные третий масштабный усилитель, второй блок деления и блок модуля, причем первым и вторым входом функционально преобразователя являются соответственно вход третьего масштабного усилителя и второй вход второго блока деления, а выходом - выход блока модуля.
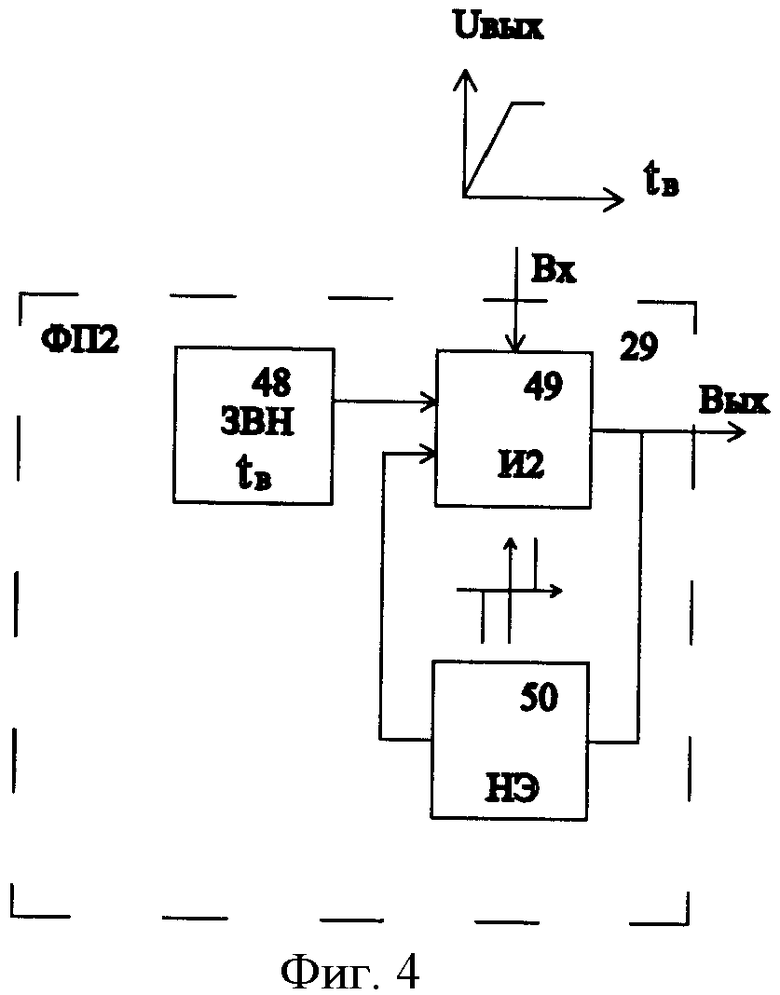
Второй функциональный преобразователь содержит последовательно соединенные задатчик времени нарастания и второй интегратор, а также нелинейный элемент, вход и выход которого соединены соответственно с выходом и вторым входом второго интегратора, причем выходом второго функционального преобразователя является выход второго интегратора.
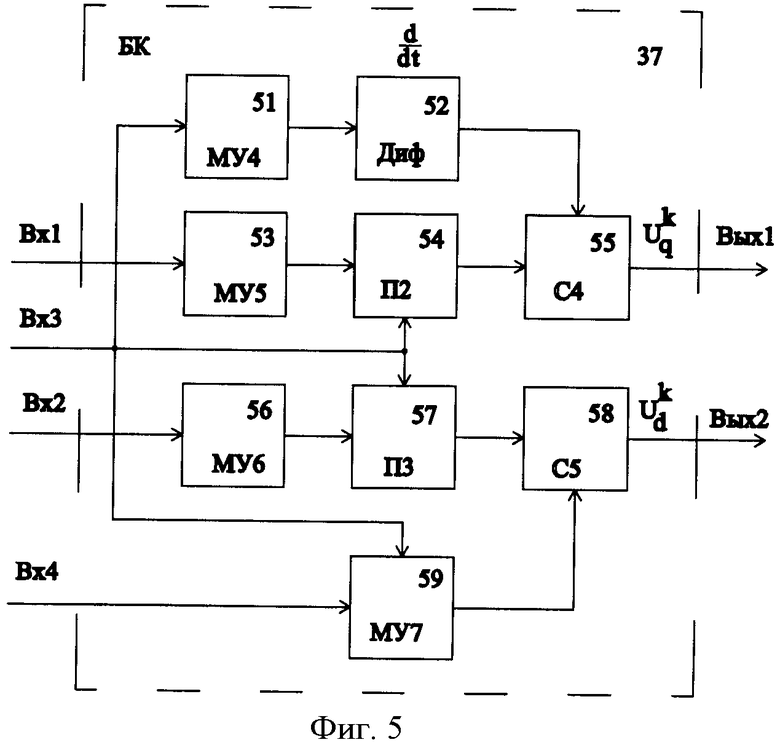
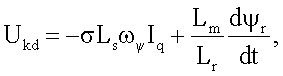
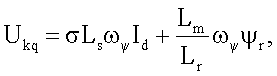
Блок коррекции содержит последовательно соединенные четвертый масштабный усилитель, дифференциатор и четвертый сумматор, последовательно соединенные пятый масштабный усилитель и второй перемножитель, выход которого подключен ко второму входу четвертого сумматора, последовательно соединенные шестой масштабный усилитель, третий перемножитель и пятый сумматор, а также седьмой масштабный усилитель, при этом вход четвертого масштабного усилителя одновременно подключен ко вторым входам второго и третьего перемножителей и седьмого сумматора, первым входом блока коррекции является вход пятого масштабного усилителя, вторым входом - вход шестого масштабного усилителя, третьим входом - вход четвертого масштабного усилителя, четвертым входом - первый вход седьмого масштабного усилителя, а первым и вторым выходом соответственно - выход четвертого и пятого сумматоров.
Блок коррекции обеспечивает компенсацию влияния перекрестных связей на процессы, происходящие в контуре момента электропривода в соответствии с выражениями:
где ψr - модуль потокосцепления ротора; Ls,Lr,Lm - индуктивности фаз статора, ротора, взаимная;  - коэффициент рассеяния; Id, Iq проекции векторов напряжения и тока статора на оси d и q; ωψ - частота вращения вектора потокосцепления ротора.
- коэффициент рассеяния; Id, Iq проекции векторов напряжения и тока статора на оси d и q; ωψ - частота вращения вектора потокосцепления ротора.
Максимальная величина задания активного тока, формируемого в четвертом блоке ограничения, определяется в соответствии с выражением:
где Км - коэффициент перегрузки по моменту; Is, Id - номинальные значения векторов тока статора и активного тока.
В качестве иллюстраций на фиг.1 приведена векторная диаграмма, поясняющая принцип ориентации системы координат по вектору потокосцепления ротора; фиг.2 - функциональная схема предлагаемого частотно-регулируемого электропривода; фиг.3 - функциональная схема первого функционального преобразователя; фиг.4 - функциональная схема второго функционального преобразователя; фиг.5 - функциональная схема блока коррекции; фиг.6 - ограничения выходного напряжения автономного инвертора напряжения; фиг.7 - выбор векторов выходного напряжения инвертора напряжения; фиг.8 - эпюры напряжений, поясняющие работу электропривода.
Частотно-регулируемый асинхронный электропривод содержит силовой блок (СБ) 1 с входящими в него последовательно соединенными выпрямителем напряжения сети (В) 2, сглаживающим фильтром (СФ) 3 с датчиком напряжения (ДН) 4 и инвертором напряжения (ИН) 5, блок векторной широтно-импульсной модуляции (Блок ШИМ) 6, асинхронный электродвигатель (М) 7, блок датчиков фазных токов (БДФТ) 8, передаточный механизм (ПМ) 9, импульсный датчик перемещений (ИД) 10 с двумя выходами, первым выходом 11 является угловое положение ротора электродвигателя, а вторым выходом 12 - его скорость, задатчик текущей угловой скорости электродвигателя (ЗУС) 13, задатчик потокосцепления электродвигателя 14, регулятор частоты вращения (РЧВ) 15, первый блок деления (БД1) 16, регулятор активного тока (PTq) 17, регулятор реактивного тока (PTd) 18, координатный преобразователь напряжений (КП1) 19, координатный преобразователь токов (КП2) 20, наблюдательный блок состояния электропривода (НБС) 21, содержащий первый 22 и второй 23 масштабный усилитель (МУ1), (МУ2), апериодическое звено (A3) 24, делитель (Д) 25, первый интегратор (И1) 26 и первый сумматор (С1) 27, последовательно соединенные первый функциональный преобразователь (ФП1) 28, первый перемножитель (П1) 29, регулятор потока (РП) 30 и первый блок ограничения (БО1) 31, второй функциональный преобразователь (ФП2) 32, последовательно соединенные второй блок ограничения (БО2) 33 и второй сумматор (С2) 34, последовательно соединенные третий блок ограничения (БО3) 35 и третий сумматор (С3) 36, блок ограничения напряжения (БОН) 37, блок коррекции (БК) 38, последовательно соединенные первый релейный элемент (РЭ1) 39 и логический сумматор (И) 40, второй релейный элемент (РЭ2) 41, последовательно соединенные коммутатор (Ком) 42 и задатчик интенсивности (ЗИ) 43, четвертый блок ограничения (БО4) 44.
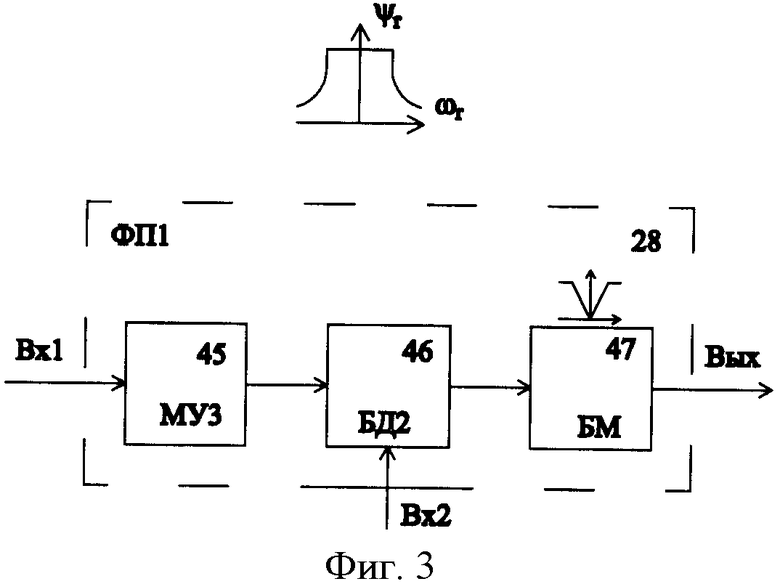
Функциональный преобразователь ФП1 состоит из последовательно соединенных третьего масштабного усилителя (МУ3) 45, второго блока деления (БД2) 46 и блока модуля (БМ) 47.
Функциональный преобразователь ФП2 состоит из задатчика времени нарастания 48, второго интегратора (И2) 49 и нелинейного элемента (НЭ) 50.
Блок коррекции состоит из последовательно соединенных четвертого масштабного усилителя (МУ4) 51 и дифференциатора (Диф) 52, последовательно соединенных пятого масштабного усилителя (МУ5) 53, второго перемножителя (П2) 54 и четвертого сумматора (С4) 55, последовательно соединенных шестого масштабного усилителя (МУ6) 56, третьего перемножителя (П3) 57 и пятого сумматора (С5) 58, седьмого масштабного усилителя (МУ7) 59.
Все используемые составные части системы управления являются известными либо могут быть получены из известных устройств путем их объединения известными методами.
Вопросы применения и построения координатных преобразователей напряжений 19 и токов 20 подробно описаны в [4] - Элементы системы управления частотным приводом с подчиненным векторным регулированием. /Алексеев В.В., Дартау В.А., Рудаков В.В. - Электротехническая промышленность. Серия Электропривод. - М., 1981. вып.4 (93), регуляторы частоты вращения 15, токов 17, 18, потокосцепления 30 при известных требованиях к контуру могут быть построены по требованиям и правилам, изложенным в [5], Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1973. - 350 с, с реализацией аппаратной части на основе методов, приведенных в [6] - Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для ABM. - М., Энергия, 1978, блок деления 16, 46, делитель 25, сглаживающий фильтр 3, интегратор 26, 49, масштабный усилитель 22, 23, 45, 51, 53, 56, 59, апериодическое звено 24, сумматор 27, 34, 36, 55, 58, перемножитель 29, 54, 57, блок ограничения 31, 33, 35, 44, релейный элемент 39, 41, нелинейный элемент 50, блок модуля 47, дифференциатор 52, а также логический сумматор 40 могут быть реализованы на операционных усилителях [7] - Титце У., Шенк К. Полупроводниковая схемотехника. - М.: Мир, 1982, [8] - Лысеко Е.В. Функциональные элементы релейных устройств на интегральных микросхемах. - М.: Энергоатомиздат, 1083. - 128 с., [9] - Шило В.Л. Функциональные аналоговые интегральные микросхемы. - М.: Радио и связь, 1982. - 128 с. или цифровых микросхемах. Коммутатор 42 может быть реализован на герконах, реле, электронных ключах и т.п. Аппаратная реализация и работа блока векторной ШИМ 6 с диаграммами работы изложена в [10, 11] - Изосимов Д.Б., Рыбкин С.Е. Широтно-импульсная модуляция трехфазных автономных инверторов. - Электричество, 1997. - №6, Изосимов Д.Б., Рыбкин С.Е. Шевцов С.В. Симплексные алгоритмы управления трехфазным автономным инвертором напряжения с ШИМ. - Электротехника, 1993, №12. Работа импульсного датчика перемещения 10 описана в [12] - Преобразователи перемещения. Блоки индикации. Каталог 2001 г. - СПб, ОАО СКБ «ИС», 2001. - 125 с. Функциональные и электрические схемы автономного инвертора напряжения 5, выпрямителя напряжения сети 2, сглаживающего фильтра 3, их работа и рекомендации по применению приведены в [13] - Герман - Галкин СГ. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - СПб.: КОРОНА принт, 2001. - 320 с., ил. Функциональная и электрическая схемы, описание работы и рекомендации по выбору элементов задатчика интенсивности ЗИ 43 приведены в [14]. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. - Л., Энергоиздат. Ленингр. Отд., 1982. - 392 с, стр.54-59.
Силовой блок (СБ) 1 обеспечивает преобразование и усиление по мощности сигналов управления, поступающих на управляющие входы инвертора напряжения (ИН) с блока 6 векторной ШИМ, управление затворами силовых транзисторов, формирование защит и гальваническую развязку силовых и управляющих цепей.
Датчики механических и электрических переменных электропривода формируют нормированные сигналы обратных связей с гальванической развязкой измерительных и информационных цепей. В аппаратуре управления электропривода используются: датчик напряжения (ДН) 4, состоящий из резистивного делителя и изолирующего усилителя с оптронной развязкой, установленный в звене постоянного напряжения после емкостного сглаживающего фильтра (СФ) 3, блок датчиков фазного тока (БДФТ) 8 компенсационного типа, установленных в выходных фазах автономного инвертора напряжения (ИН) 5, и импульсный датчик (ИД) 10, установленный в передаточном механизме (ПМ) 9 или на исполнительном электродвигателе (М) 7, измеряющий скорость и угловое положение ротора асинхронного электродвигателя. При установке датчика перемещений в передаточном механизме (ПМ) 9 передаточное число кинематической цепи от вала электродвигателя до датчика перемещений должно быть целочисленной величиной и иметь значение от 1 до 4, что определяется допустимой максимальной скоростью вращения импульсного датчика и особенностями обработки выходного импульсного сигнала датчика [12] - Преобразователи перемещения. Блоки индикации. Каталог 2001 г. - СПб, ОАО СКБ «ИС», 2001. - 125 с.
В импульсном датчике угловых перемещений (ИД) 10 вырабатываются прямоугольные измерительные импульсы А и В, сдвинутые относительно друг друга на 90 градусов, частота следования которых определяется скоростью вращения электродвигателя, а фазовый сдвиг сигнала А относительно сигнала В (либо +90 град, либо -90 град) определяет направление вращения электродвигателя. Короткий импульс R определяет нулевое положение импульсного датчика перемещений 10. В электронном блоке импульсного датчика перемещений 10, выполненном на базе ТТЛ логики, вырабатываются нормированные по напряжению сигналы 0-5В для последующей обработки и выработки сигналов, пропорциональных углу поворота или скорости ротора электродвигателя [10] - стр.3-5. Преобразователи перемещения. Блоки индикации. Каталог. - СПб.: ОАО СКБ «ИС», 2001. - 125 с.
Функциональный преобразователь ФП1 вырабатывает сигнал задания потокосцепления ротора ψ2. Функциональная связь между реальной скоростью двигателя ω и потокосцеплением ротора АД определяет постоянство ψ2 на уровне задания номинального потокосцепления ротора ψ2ном при скорости ротора 0 ωrmах ωr=ωrнoм и уменьшение ψ2 при ωк>ωном. Последний вариант обеспечивает работу АД в зоне регулирования скорости выше номинальной при постоянстве номинального напряжения питания статора.
Функциональный преобразователь ФП2 в заданное время tB формирует сигнал задания потокосцепления ψ2з в виде линейно нарастающего напряжения при ступенчатой форме входного сигнала. После достижения установившегося значения сигнала на выходе ФП2, в системе управления силовым блоком появляется логический сигнал на разрешение управления СБ1 со стороны сигнала управления электропривода ωз.
Формирование требуемого характера переходных процессов привода связано с использованием специального задающего устройства - задатчика интенсивности ЗИ [40]. Назначение этого задающего устройства состоит в том, чтобы преобразовать ступенчатый задающий сигнал скорости ωз в управляющий сигнал ωу, который будет изменяться во времени по некоторому наперед заданному закону. Обычно используется линейный закон изменения сигнала ωу во времени.
Работа форсированного привода происходит следующим образом. Векторное управление частотно-регулируемого асинхронного электропривода связано как с изменением частоты и текущих значений переменных асинхронного двигателя - тока, напряжения, скольжения, так и с взаимной ориентацией их векторов в полярной или декартовых системах координат. За счет регулирования амплитудных значений переменных и углов между их векторами обеспечивается полное управление асинхронным электродвигателем, как в статике, так и в динамике, что дает заметное улучшение качества переходных процессов по сравнению со скалярным управлением. Именно этот факт и является определяющим при выборе систем с векторным управлением.
Основное назначение системы векторного управления в управляемом приводе - регулирование и стабилизация момента и скорости двигателя [15] - Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводы с векторным управлением. - Л., Энергоатомиздат, 1987. - 136 с.
Момент асинхронного двигателя формируется за счет воздействий на абсолютные значения векторов потокосцепления статора ψ1, основного потокосцепления ψµ, потокосцепления ротора ψ2, токов статора I1 и ротора I2, а также фазовых сдвигов между ними. От того, какие векторы выбраны в качестве регулируемых, зависят принцип построения и техническая реализация систем управления электроприводом. Особенностью систем управления с опорным вектором ψ2 является более простая, чем при опорном векторе ψµ , структура управления. Момент АД при ориентации системы координат по вектору ψ2 определяется выражением 1 [16] - Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. - М-Л., Госэнергоиздат, 1963. - 744 с.
где L2 - индуктивность обмотки ротора, приведенная к цепи статора, L12 - взаимная индуктивность.
Векторная диаграмма при ориентации вектора потокосцепления ротора ψ2 по оси d системы координат d-q представлена на фиг.1. Там же показаны векторы токов намагничивания Iµ, ротора I2 и проекции векторов тока статора и ротора на оси вращающейся - d, q и неподвижной - α, β систем координат. При этом

т.е. в установившемся режиме вектор тока ротора I2 перпендикулярен вектору ψ2, отстает от него на угол 90 эл. град, а его модуль при ψ2=const меняется пропорционально абсолютному скольжению.
В двигательном режиме вектор тока статора I1 опережает вектор ψ2 на угол
θ=arc tg(L2ω0нoмsa/R2), его составляющая I1d=ψ2/L12 определяет потокосцепление ротора ψ2 а составляющая I1q=ψ2L2ω0номSa/(L12R2) компенсирует влияние на него реакции ротора.
В соответствии с выражениями (1), (2) электромагнитный момент асинхронного электродвигателя определяется взаимодействием ортогональных составляющих потокосцепления ротора ψ2=ψ2d=L12I1d и тока статора Ilq. Таким образом, при стабилизации ψ2, как и при стабилизации ψµ, система векторного управления будет подобна системе управления двигателями постоянного тока, где составляющая I1d тока статора определяет потокосцепление ψ2 АД (магнитный поток ДПТ), а составляющая I1q является моментной составляющей тока статора (аналогично току якоря ДПТ).
Векторная диаграмма фиг.1 позволяет дать физическую интерпретацию принципа построения систем векторного управления АД. В системе управления с ориентацией вектора потокосцепления ротора  по оси d при отсутствии задания скорости и статической нагрузки на валу АД (Мс=0) должно обеспечиваться задание исходного потокосцепления ψ2 лишь за счет составляющей тока статора I1d. При этом вектор тока статора
по оси d при отсутствии задания скорости и статической нагрузки на валу АД (Мс=0) должно обеспечиваться задание исходного потокосцепления ψ2 лишь за счет составляющей тока статора I1d. При этом вектор тока статора  , равный по модулю току I1d, будет совпадать по направлению с вектором , равным по модулю потокосцеплению ψ2d. Если подобного совпадения не произойдет, то появление составляющей I1d≠0 приведет согласно (1) к возникновению электромагнитного момента М≠0 и при Мс=0 начнется движение вала ротора АД. Тогда за счет обратной связи по скорости двигателя система должна обеспечить фазовый поворот вектора до его совпадения с вектором , при котором электромагнитный момент станет равным нулю и произойдет останов двигателя. При неподвижном роторе (f1=0, αω0ном=0) и отсутствии статической нагрузки вектор будет неподвижен в пространстве, а ток I1 - постоянным во времени. Подобное состояние АД аналогично условию подачи постоянного тока в обмотку возбуждения ДПТ без подключения его якорной цепи к источнику напряжения.
, равный по модулю току I1d, будет совпадать по направлению с вектором , равным по модулю потокосцеплению ψ2d. Если подобного совпадения не произойдет, то появление составляющей I1d≠0 приведет согласно (1) к возникновению электромагнитного момента М≠0 и при Мс=0 начнется движение вала ротора АД. Тогда за счет обратной связи по скорости двигателя система должна обеспечить фазовый поворот вектора до его совпадения с вектором , при котором электромагнитный момент станет равным нулю и произойдет останов двигателя. При неподвижном роторе (f1=0, αω0ном=0) и отсутствии статической нагрузки вектор будет неподвижен в пространстве, а ток I1 - постоянным во времени. Подобное состояние АД аналогично условию подачи постоянного тока в обмотку возбуждения ДПТ без подключения его якорной цепи к источнику напряжения.
При поступлении сигнала задания скорости АД система управления сначала обеспечивает поворот вектора  относительно и, в итоге, формирование электромагнитного момента М≠0, под действием которого при М>Мс начинается движение вала ротора АД. Это движение будет происходить до тех пор, пока реальная скорость АД не сравняется с заданным значением. При их равенстве вектор вновь устанавливается по направлению вектора , а электромагнитный момент становится равным нулю. Однако в отличие от предыдущего режима ток статора является уже переменным во времени, а вектор вращается в пространстве со скоростью, пропорциональной частоте тока статора. С той же скоростью вращается и система координат d-q. Поэтому составляющие I1d и ψ2d остаются на прежнем уровне. АД работает в режиме идеального холостого хода со скоростью, связанной с заданной частотой тока статора. Подобное состояние АД аналогично режиму идеального холостого хода ДПТ, когда при постоянном его возбуждении и Мс=0 якорная цепь ДПТ подключена к регулируемому источнику постоянного напряжения.
относительно и, в итоге, формирование электромагнитного момента М≠0, под действием которого при М>Мс начинается движение вала ротора АД. Это движение будет происходить до тех пор, пока реальная скорость АД не сравняется с заданным значением. При их равенстве вектор вновь устанавливается по направлению вектора , а электромагнитный момент становится равным нулю. Однако в отличие от предыдущего режима ток статора является уже переменным во времени, а вектор вращается в пространстве со скоростью, пропорциональной частоте тока статора. С той же скоростью вращается и система координат d-q. Поэтому составляющие I1d и ψ2d остаются на прежнем уровне. АД работает в режиме идеального холостого хода со скоростью, связанной с заданной частотой тока статора. Подобное состояние АД аналогично режиму идеального холостого хода ДПТ, когда при постоянном его возбуждении и Мс=0 якорная цепь ДПТ подключена к регулируемому источнику постоянного напряжения.
При увеличении нагрузки на валу АД система управления обеспечивает поворот вектора относительно  таким образом, чтобы, во-первых, составляющая I1d оставалась неизменной, сохраняя постоянство потокосцепления ψ2, а во-вторых, составляющая I1q увеличилась до значения, при котором электромагнитный момент становился равным моменту сил сопротивления на валу АД и двигатель выходил бы на установившийся режим.
таким образом, чтобы, во-первых, составляющая I1d оставалась неизменной, сохраняя постоянство потокосцепления ψ2, а во-вторых, составляющая I1q увеличилась до значения, при котором электромагнитный момент становился равным моменту сил сопротивления на валу АД и двигатель выходил бы на установившийся режим.
На векторной диаграмме фиг.1 вектор по мере увеличения нагрузки скользит по линии, перпендикулярной вектору . Результирующая составляющая токов статора и ротора по оси q создает составляющую потокосцепления ψµq. При этом конец вектора ψµ скользит по прямой 2, также перпендикулярной вектору . Таким образом, при увеличении нагрузки двигателя и стабилизации ψ2 поток намагничивания двигателя также увеличивается.
При стабилизации потокосцепления ротора (ψ2=const) механические характеристики АД подобны характеристикам ДПТ с независимым возбуждением. Поскольку теория и технические решения систем управления электроприводом с ДПТ, имеющим независимое возбуждение, достаточно апробированы, то понятна привлекательность применения систем векторного регулирования с управлением по потоку ротора.
Функциональная схема электропривода при векторном управлении асинхронным двигателем и определении потокосцепления ротора в наблюдательном блоке состояния по модели потока приведена на фиг.2. К особенностям организации данного варианта функциональной схемы следует отнести наличие четырех контуров управления для регулирования скорости, потокосцепления ротора и составляющих вектора тока статора. Внешним по отношению к контуру регулирования тока Iq является контур регулирования скорости двигателя. На входе контура регулирования тока Iq сравнивается выходной сигнал регулятора скорости Upc, который задает значение электромагнитного момента, и сигнал обратной связи, вычисленный в КП2. Внешним по отношению к контуру тока по оси d является контур регулирования потокосцепления ротора с регулятором потока (РП) 30. Выходной сигнал регулятора потока (РП) 30 представляет собой сигнал задания составляющей тока статора по вещественной оси Id. На входе регулятора (РП) 30 сравнивается сигнал задания ψ2з и истинное значение потока ротора, вычисленное в НБС 21. Учитывая высокие требования к динамическим режимам работы привода, во внутреннем контуре регулирования составляющей тока статора ίd используется ПИД-регулятор, а регулятор потокосцепления РП во внешнем контуре регулирования может быть выполнен либо в виде ПИ-регулятора для астатической системы регулирования, либо в виде П-регулятора для статической системы. Для исключения значительного перерегулирования во внутреннем контуре на входе регулятора тока РТ целесообразно установить апериодический фильтр с передаточной функцией:
где Тф=Тr - постоянная времени фильтра.
Контур регулирования скорости с регулятором частоты вращения (РЧВ) 15 замкнут по сигналу ωr, пропорциональному текущей скорости ротора асинхронного двигателя, получаемому с импульсного датчика (ИД) 10. Результат суммирования в регуляторе частоты вращения 15 сигнала задания ωз и сигнала отрицательной обратной связи по скорости двигателя ωт является сигналом задания момента двигателя. Полярность сигнала задания ωз определяет направление момента и скорости вращения двигателя.
Оптимальная настройка контуров управления выполняется на основе метода подчиненного регулирования исходя из желаемого быстродействия электропривода [17] - Ремшин Б.И., Ямпольский Д.С. Проектирование и наладка систем подчиненного регулирования электроприводов. М., Энергия. - 184 с. Информация об ориентации системы координат в режиме реального времени восстанавливается расчетным путем в наблюдательном блоке состояния на основе параметров АД и системы математических дифференциальных уравнений роторной цепи АД. Данный вариант построения системы привода обеспечивает качественное управление моментом АД в динамике, а также возможность регулирования скорости выше номинальной. Обязательным условием для реализации предложенной структуры управления является наличие импульсного датчика на валу АД, разрешающая способность которого, в конечном итоге, определяет максимальную точность и диапазон регулирования частоты вращения двигателя. Система векторного управления позволяет разделить каналы регулирования и обеспечить независимое управление по модулю вектора потокосцепления ротора и скорости двигателя при сохранении прямой пропорциональности между моментом, развиваемым двигателем, и составляющей тока статора, находящейся в квадратуре с волной потокосцепления ротора. Благодаря этому появляется возможность реализовать двухзонное регулирование частоты вращения ротора АД. В первой зоне регулирования от нуля до номинальной частоты вращения управление двигателем осуществляется одновременным увеличением амплитуды и частоты выходного напряжения преобразователя частоты. Во второй зоне регулирование от номинальной до максимальной частоты вращения двигателя управление двигателем осуществляется только за счет повышения частоты выходного напряжения преобразователя. Амплитуда напряжения при этом поддерживается постоянной, равной номинальному значению. Такое управление позволяет увеличить диапазон регулирования частоты вращения двигателя выше номинальной и, следовательно, расширить область применения частотно-регулируемых электроприводов.
Частота напряжения на выходе силового блока (СБ) 1 в системе координат d-q определяется выражением 3 [18] - Козярук А.Е., Рудаков В.В. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов. - С-Пб., Эл. техн. компания, 2004. - 127 с.:

Следовательно, в первой зоне регулирования в соответствии с (3) при ψ2=const частота ω0 изменяется пропорционально составляющей напряжения Us, а во второй зоне регулирования при Us=const частота ω0 изменяется обратно пропорционально модулю вектора потокосцепления ротора ψ2. Модуль вектора потокосцепления ротора в системе управления задается на уровне номинального значения.
Перевод из зоны регулирования с постоянным моментом в зону регулирования с постоянной мощностью осуществляется автоматически с помощью ФП1. На входе регулятора потокосцепления ротора действует не единичное постоянное задающее воздействие, а сигнал, обратно пропорциональный частоте вращения ротора двигателя. Этот сигнал усиливается с коэффициентом усиления Kψ третьим масштабным усилителем (МУЗ) 45 и поступает на вход второго блока деления 46 и вычисления модуля (БМ) 47. В блоке модуля 47 сигнал задания потокосцепления ротора ограничивается сверху на единичном уровне. Поэтому в первой зоне регулирования при скорости ротора двигателя меньше номинальной ωr<ωrном сигнал задания потокосцепления не изменяется и электропривод работает с ψ2=const. После разгона двигателя до скорости выше номинальной ωr>ωrном задающий сигнал потокосцепления ротора выходит из ограничения и электропривод переходит во вторую зону регулирования.
Исходной информацией для построения системы векторного управления является информация о мгновенных значениях и пространственном положении вектора потокосцепления в воздушном зазоре, мгновенных значениях токов или напряжений статора и скорости ротора двигателя. Координаты электропривода, измеренные в неподвижной системе координат, могут быть преобразованы к вращающейся системе координат, и из них могут быть выделены постоянные значения, пропорциональные составляющим векторов в неподвижной системе координат. По этим координатам и производится управление. Вращающаяся система координат принимается определенным образом ориентированной относительно вектора потокосцепления двигателя. Удобные алгоритмы управления имеют место при ориентации координатной системы относительно потокосцепления ротора двигателя.
Питание двигателя осуществляется от силового блока со звеном постоянного тока и инвертором напряжения. Напряжения на выходе инвертора UА, UВ, UС создают токи в статорных обмотках двигателя ίА, ίВ, ίС в неподвижной системе координат. В структуре привода фиг.2 быстродействующие токовые контуры выполнены во вращающейся системе координат. Выходные сигналы регуляторов токов Ud и Uq, являющиеся сигналами задания напряжения инвертора, - сигналы постоянного тока во вращающейся системе координат. Поэтому контуры регулирования токов по прямой и квадратурной осям включают в себя преобразователи координат (КП1), (КП2) 19, 20. В координатном преобразователе напряжений (КП1) 19 осуществляется перевод управления из вращающихся координатных осей d-q к неподвижным α-β по выражению (4):

В преобразователе координат (КП2) 20 вычисление токов Id и Iq, пропорциональных моменту и потокосцеплению ротора электродвигателя, происходит по выражениям (5):

где iα и iβ - составляющие тока в неподвижной системе координат;
ωк - скорость вращения системы координат, вращающейся с полем электродвигателя.
Составляющие тока статора iα, iβ в неподвижной системе координат вычисляются по замеренным в БДФТ 8 реально существующим мгновенным значениям фазных токов статора электродвигателя в соответствии с выражением (6) [2] - Глазенко Т.А., Герман-Галкин С.Г., Полищук С.Б., Рыдов В.А. Частотно-регулируемые асинхронные электропривода для станков с ЧПУ. - Л., ЛДНТП, 1988. - 28 с, ил.:

Мгновенные значения фазных токов в неподвижной системе координат измеряются с помощью электрического датчика тока типа LEM [19] - Датчики - трансформаторы тока и напряжения серии ЛЕМ. Технические условия ТУ 3413-001-00512622-96. - Тверь, ООО «ТВЕЛЕМ». - 1996. - 29 с., или резистивного датчика.
Сигналы задания Uα, Uβ для расчета фазных напряжений UA, UB, UC, формирующих требуемые фазные токи статора ia, iв, ic, с выхода координатного преобразователя напряжений 19, поступают на соответствующие входы блока векторной ШИМ 6, где вычисляются проекции векторов эквивалентного напряжения на зажимах статора электродвигателя, представляющие собой усредненные на определенном интервале дискретности от высокочастотных коммутационных пульсаций мгновенные значения фазных напряжений.
Математическая модель ротора АД реализована в НБС 21, на вход которого кроме текущих значений Id, Iq составляющих тока статора поступает сигнал, пропорциональный углу поворота ротора двигателя с первого выхода 11 импульсного датчика 10. НБС формирует сигнал, пропорциональный потокосцеплению ψ2 ротора двигателя и сигнал θ, определяющий ориентацию системы координат. Структурная схема НБС приведена на фиг.5.
Наблюдательный блок состояния электропривода (НБС) 21 построен во вращающейся системе координат (d-q), ориентированной по вектору потокосцепления ротора. Блок восстанавливает переменные, необходимые для реализации алгоритма векторного управления в соответствии с уравнениями (7) роторной цепи электродвигателя:

где:
 - постоянная роторной цепи;
- постоянная роторной цепи;
R2, L2, Lm - активное сопротивление, индуктивности ротора и цепи намагничивания;
ίd, ίq - проекции вектора тока статора на оси d и q;
ωψ - частота вращения вектора потокосцепления ротора;
ωs - частота скольжения;
ωr - скорость вращения ротора электродвигателя;
Zp - число пар полюсов; ψ2 - потокосцепление ротора.
Отметим, что для восстановления переменных в наблюдательном блоке состояния 21 вместо реальных значений тока статора в осях (d,q) используются их заданные значения ίdз, ίqз, что допустимо при быстродействующих контурах тока, отрабатывающих заданные значения без фазовых и статических ошибок.
Значения потокосцепления ротора и частоты роторной ЭДС двигателя определяются в наблюдательном блоке состояния 21 в соответствии с выражениями 8, 9, полученными из системы уравнений роторной цепи электродвигателя 7:
Выражение (8) показывает, что при ориентации оси d вращающейся системы координат по вектору потокосцепления ротора ψ2 значение потокосцепления однозначно определяется составляющей тока статора по прямой оси d. Выражение (9) дает возможность при известном значении потокосцепления рассчитать значение частоты роторной ЭДС по составляющей тока статора по квадратурной оси q. Расчет потокосцепления ротора и частоты роторной ЭДС по формулам 8, 9 обеспечивает ориентацию оси d по вектору потокосцепления ротора ψ2 (см. векторную диаграмму фиг.1).
Для определения угла поворота θ вычисляется сумма измеренного значения скорости, умноженного на число пар полюсов, и рассчитанного в наблюдательном блоке состояния (НБС) 21 значения роторной частоты, которая определяет текущее значение частоты напряжения на статоре электродвигателя - ω0эл=pnω+ωr. Интегрирование этой величины в интеграторе И1 26 дает текущее значение угла поворота θ вращающейся системы координат d-q относительно связанной со статором неподвижной системы координат α-β. Это значение используется в блоках преобразователей координат КП1, КП2 прямого канала и канала обратной связи для расчета необходимых значений направляющих sinθ и cosθ.
В предложенной системе управления исключение влияния перекрестных связей каналов регулирования потока и скорости двигателя обеспечивается путем использования быстродействующих контуров тока [20] - Novotny D.W. and Lipo Т.А. Introduction to Field Orientation and High Performance AC Drives Second Edition / IEE Industry Applications Society Annual Meeting. 1986. Section 2, и специального блока коррекции (БК) 38, вырабатывающего сигналы компенсации в соответствии с уравнениями 10:
Исключение взаимовлияния каналов позволяет рассматривать контур регулирования потокосцепления ротора и контур регулирования момента автономными и делает возможным независимое регулирование потокосцепления ротора и момента асинхронного электродвигателя подобно тому, как происходит регулирование потока возбуждения в двигателе постоянного тока с независимым возбуждением. В частности, существует возможность предварительного намагничивания двигателя, т.е. возможность установить поток до того, как на контур скорости будет подан сигнал задания скорости, и когда скорость двигателя равна нулю.
Формирование амплитудного значения потока двигателя, а также скорости его нарастания обеспечивают функциональные преобразователи (ФП1) 28, (ФП2) 32. Сигнал задания потокосцепления с ЗП 14 поступает на вход ФП1. Выходной сигнал ФП1 определяется значением скорости двигателя. До тех пор, пока скорость двигателя не превышает номинального значения, сигнал на выходе ФП1 задает номинальный поток, который остается постоянным во всем диапазоне регулирования скорости ниже номинального значения. Когда скорость двигателя превысит номинальное значение, сигнал на выходе ФП1 будет уменьшаться и скорость, большая номинальной, будет достигнута при ослаблении потокосцепления ротора при постоянном значении напряжения на статоре.
Блок ФП2 32 при подаче сигнала задания ψз с ФП1 28 на вход контура регулирования потокосцепления ротора обеспечивает плавное нарастание потокосцепления ротора. Блок НЭ 50, соединенный входом с выходом интегратора (И2) 49, а выходом с входом интегратора И2, ограничивает предельно допустимое значение потокосцепления. Коэффициент усиления интегратора определяет интенсивность нарастания потокосцепления ротора с учетом заданного времени нарастания, подаваемого на вход интегратора И2 с задатчика времени нарастания (ЗВН) 48.
На входе регулятора частоты вращения управляемого привода предусмотрен задатчик интенсивности (ЗИ) 43. При подаче на его вход сигнала задания скорости любой, в том числе и ступенчатой, формы изменение сигнала задания скорости на выходе задатчика интенсивности происходит по линейному или другому закону, что обеспечивает плавный характер разгона и торможения привода.
Для обеспечения корректной работы системы подчиненного регулирования выходной сигнал регулятора внешнего контура необходимо ограничить [17, 21] - Ремшин Б.И., Ямпольский Д.С. Проектирование и наладка систем подчиненного регулирования электроприводов. - М., Энергия, 1975. - 184 с, Эпштейн И.И. Автоматизированный электропривод переменного тока. - М., Энергоатомиздат, 1982. - 120 с. Для ограничения токов статора по прямой и квадратурным осям в регуляторах потока (РП) и скорости (РЧВ) предусмотрены блоки ограничения выходных сигналов ίd, ίq (БО1), (БО4) 31,44. Ограничение выходного сигнала регулятора внешнего контура вступает в действие, если в переходном процессе сигнал ошибки на его входе, представляющий собой разность между сигналом задания и сигналом обратной связи, станет недопустимо большим. Отсутствие ограничения выходного сигнал регулятора может привести к недопустимому увеличению выходной величины подчиненного контура. Наличие блока ограничения не только в контуре регулирования потока, но и в контуре регулирования скорости ротора электродвигателя позволяет независимо ограничивать значения момента двигателя и тока статора по оси q.
При выборе значений ограничения токов ίd, ίq (БО2), (БО3) 33,35 имеется в виду, что они должны быть выбраны так, чтобы модуль полного тока статора, определяемый как  , не превышал предельно допустимого ограничения I1огр.
, не превышал предельно допустимого ограничения I1огр.
Задание предельно допустимых максимальных моментов АД ограничено ограничителем (БО4) 44. Сигнал М3 ограничивается БО4 44 на уровне задания, соответствующего выбранному максимальному значению электромагнитного момента АД. Задание значения момента определяется сигналом управления Upc в зависимости от режима работы электропривода. Ограничение электромагнитного момента связано и с выбором максимально допустимого тока статора I1max. С этой целью в блоке БО4 44 с учетом максимального тока статора I1 и реального значения составляющей тока статора по оси d - I1d определяется вектор максимально допустимой составляющей тока статора I1qmax в соответствии с выражением:
где Км - коэффициент форсирования по моменту
Постоянство задания электромагнитного момента при изменении потокосцепления ротора в соответствии с определением момента по выражению (1) обеспечивается делением в (БД1) 16 сигнала Upc на выходе РЧВ 15, пропорционального момену, на сигнал, пропорциональный потокосцеплению ротора ψ2, рассчитанный в НБС 21. На выходе БД1 формируется сигнал задания I1qз составляющей тока статора по оси q.
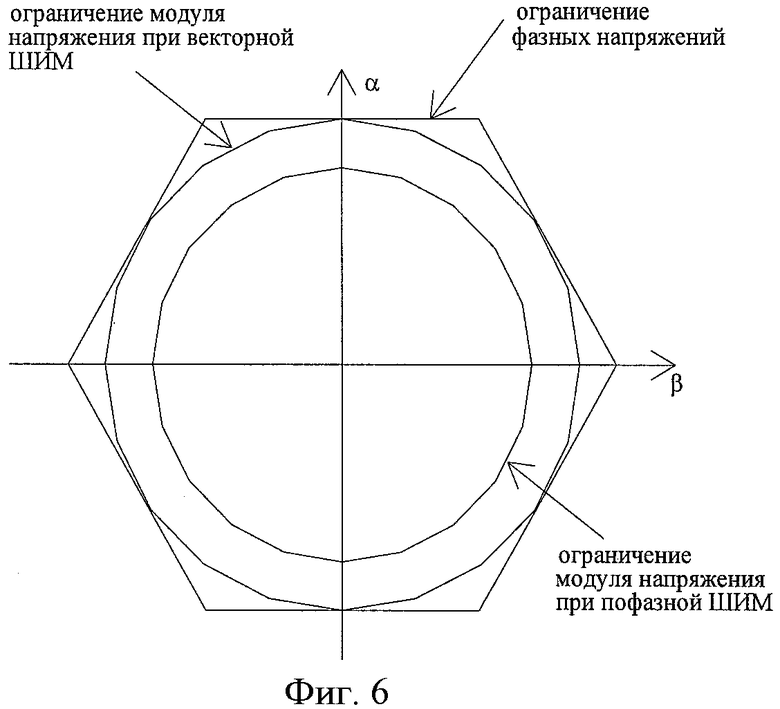
Блок ограничения напряжения (БОН) 37 обеспечивает формирование заданий на активное напряжение и напряжение намагничивания с учетом ограничений по напряжению, присущего инвертору напряжения. Область физически реализуемых фазных напряжений АД, питаемого от инвертора напряжения, представляет правильный шестиугольник, ориентированный диаметром по направляющим ортам фаз (фиг.6). Диаметр шестиугольника определяется величиной постоянного напряжения U0 со сглаживающего фильтра (СФ) 3 силового блока (СБ) 1. Использование в качестве ограничения по напряжению кусочно-линейной границы шестиугольника позволяет реализовать все энергетические возможности инвертора напряжения 5, но приводит к возникновению пульсаций электромагнитного момента с частотой, равной шестикратной частоте питания электродвигателя. С целью исключения пульсаций электромагнитного момента в БОН 37 реализовано «гладкое» ограничение, т.е. ограничение модуля напряжения. С учетом разнотемповости магнитных и электрических процессов в асинхронном двигателе в БОН 37 осуществляется иерархическая проверка реализуемости рассчитанных в блоках регулирования активного тока и реактивного тока активного напряжения и напряжения намагничивания. Осуществляется проверка реализуемости напряжения Ud, то есть если  , то
, то  , Uq=0, если
, Uq=0, если  , то проводится проверка реализуемости активного напряжения Uq. Для проверки реализуемости напряжения Uq вводится вспомогательная величина
, то проводится проверка реализуемости активного напряжения Uq. Для проверки реализуемости напряжения Uq вводится вспомогательная величина  , характеризующая максимально реализуемое активное напряжение. Если |Uq|<Uqmax, то выход ограничителя равен Ud=Udз, Uq=Uqз, в противном случае Ud=Udз,
, характеризующая максимально реализуемое активное напряжение. Если |Uq|<Uqmax, то выход ограничителя равен Ud=Udз, Uq=Uqз, в противном случае Ud=Udз,  .
.
Входное воздействие на управление скоростью привода с ЗУС 13 подается на вход регулятора частоты вращения с помощью коммутирующего элемента (Ком) 42, включенного между задатчиком текущей угловой скорости 13 и задатчиком интенсивности 43. Состояние контактов коммутатора 42 определяется значением сигнала (1, 0) с выхода логического сумматора (И) 40. При отсутствии сигнала потокосцепления ψ2 или при наличии, но уровень сигнала ψ2 с первого выхода Вых1 наблюдательного блока состояния (ИБС) 21 меньше зоны нечувствительности релейного элемента (РЭ2) 41, ключ коммутатора (Ком) 42 находится в разомкнутом состоянии и сигнал с (ЗУС) 13 не поступает на вход (ЗИ) 43 и, соответственно, на вход регулятора частоты вращения (РЧВ) 15 привода. При установлении значения сигнала ψ2 в соответствии с заданием ключ переключается в замкнутое состояние, что позволяет управлять скоростью электродвигателя. Применение последовательного подключения сигналов - вначале формирование сигнала намагничивания АД - ψ2з, а затем подача сигнала управления скоростью ωз позволяет подготовить магнитную систему электродвигателя для создания момента, что исключает броски тока и момента, позволяет получить допустимые ошибки и обеспечить согласование заданной и текущей скорости привода без значительного перерегулирования.
Блок векторной ШИМ 6 обеспечивает формирование закона модуляции и закона переключения силовых ключей инвертора напряжения, создающих в фазных обмотках АД напряжения в соответствии с заданиями, сформированными в координатном преобразователе (КП1) 19. Закон переключения силовых ключей обеспечивает минимизацию коммутационных потерь в автономном инверторе напряжения и двигателе [9] - Изосимов Д.Б., Рыбкин С.Е. Шевцов С.В. Симплексные алгоритмы управления трехфазным автономным инвертором напряжения с ШИМ. - Электротехника, 1993, №12. По сигналам Uα, Uβ в блоке ШИМ формируются внутренние переменные  ,
,  ,
,  и
и  ,
,  ,
,  в соответствии с формулами:
в соответствии с формулами:
где Udα, Udβ, Uqα, Uqβ - преобразованные в систему α - β задания на активное напряжение и напряжение намагничивания с учетом ограничения на напряжение.
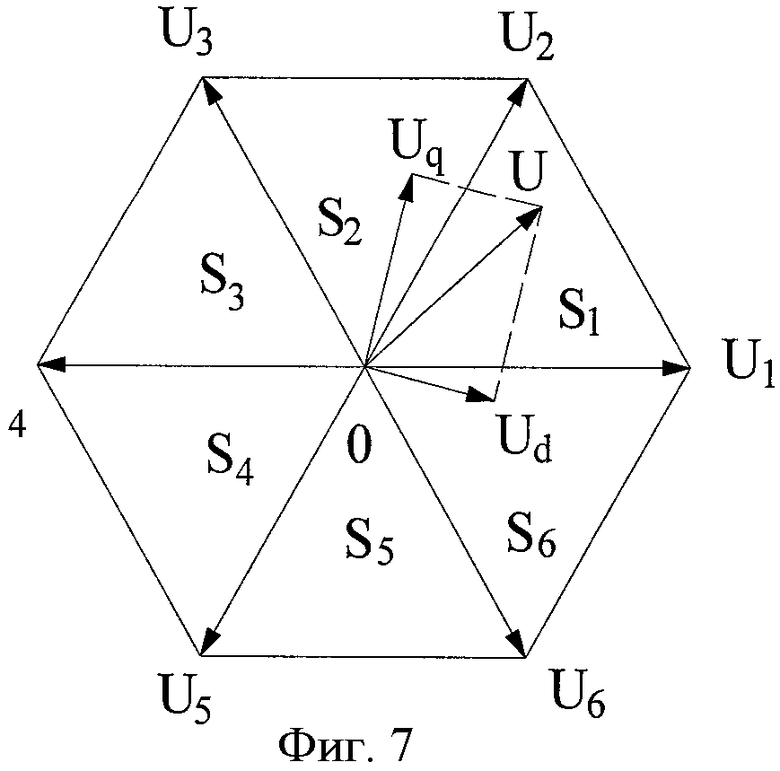
По таблице в соответствии с комбинацией знаков суммарных внутренних переменных signΛ1, signΛ2, signΛ3, определяется номер N сектора пространства реализуемых напряжений SN, в котором находится вектор задания по напряжению. Определяются ненулевые вектора U*, U**, используемые для формирования требуемого усредненного на периоде модуляции вектора напряжения, и доли времени λ*, λ** включения каждого из этих векторов. Причем время включения нулевого вектора Λ0 определяется как Λ0=1-λ*-λ**. Графическая интерпретация выбора векторов выходного напряжения в блоке ШИМ для управления автономным инвертором напряжения представлена на фиг.5
В соответствии с приведенным алгоритмом блок векторной ШИМ 6 преобразует сигналы выходного напряжения преобразователя координат КП1 в эквивалентные сигналы UA, UB, UC трехфазной системы координат, определяющие выходные напряжения СБ 1 преобразователя частоты.
Представленные на фиг.2 функциональные блоки в основном реализуются программным путем в микропроцессорной системе управления электропривода. В микроконтроллере реализуются и интерфейсные функции по связи с датчиками тока, напряжений, угла, скорости.
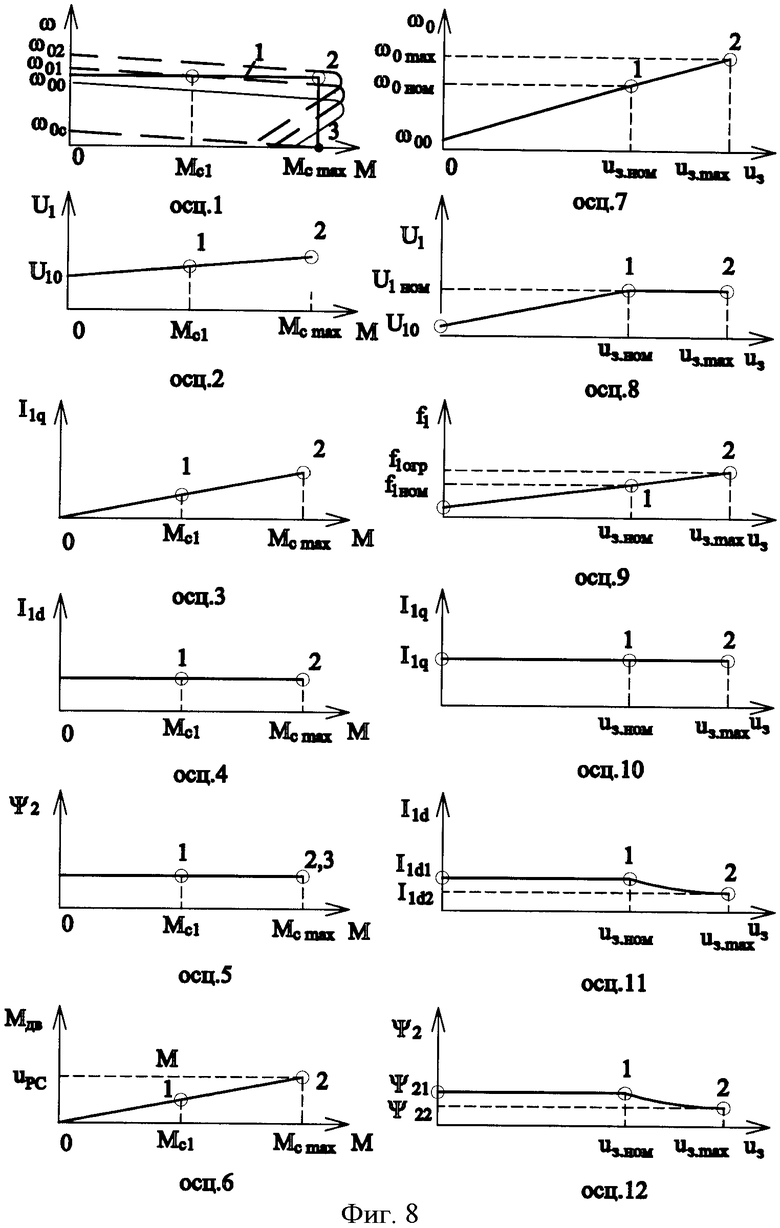
В соответствии с принципом работы рассматриваемой системы управления фиг.2 на фиг.8 приведены качественные зависимости ее основных переменных а) в функции от момента АД при постоянном сигнале задания скорости - фиг.8 (осциллограммы 1-6) M=var, ωз=const; и б) в функции от сигнала управления скоростью при постоянном статическом моменте Мс=0 - (осциллограммы 7-12) ωз=var, M=const.
Как результат действия ПИ-регулятора скорости механическая характеристика АД имеет в области нагрузок Мс<Мсмах абсолютную статическую жесткость (линия 1 на фиг.8, осц.1), а при Мс>Мсмах механическая характеристика за счет ограничения выходного сигнала регулятора скорости и ПИ-регуляторов составляющих тока в осях d, q - абсолютно мягкая (линия 2-3 на фиг.8, осц.1). Стабилизация скорости при изменении нагрузки привода обеспечивается изменением выходного сигнала регулятора частоты вращения Upc. Последнее приводит к изменению сигнала задания М3 электромагнитного момента АД и сигнала скольжения (фиг.8, осц.6). По мере увеличения статической нагрузки Мс соответственно увеличиваются напряжение на выходе СБ1 и сигнал скольжения s, рассчитываемый в наблюдательном блоке состояния (НБС) 21 (фиг.8, осц.2), а скорость двигателя остается без изменения и соответствует заданной величине ωз. Штриховые линии механических характеристик АД на фиг.8, осц.1 отражают перемещение исходной характеристики ωдв=f(Mн) при изменении сигнала задания скорости. При этом двигатель работает с максимальным моментом при любом значении момента нагрузки в диапазоне от Мн=0 до Мн=Ммах.
По мере увеличения нагрузки составляющая Iq тока статора, определяющая момент АД, также увеличивается (фиг.8, осц.3), а составляющая тока Id и определяемое ею потокосцепление ротора ψ2 сохраняются постоянными (фиг.8, осц.4-5).
При отсутствии сигнала задания скорости АД (ωз=0) и отсутствии на валу двигателя нагрузки, постоянного момента сил сопротивления Мс=0, начальные выходное напряжение U1 и частота преобразователя f равны нулю. При появлении нагрузки момента сил сопротивления, выходное напряжение U1 и частота f преобразователя соответствуют значениям, при которых начальная скорость идеального холостого хода АД ω0 0 и механическая характеристика двигателя обеспечивает при ω=0 момент Мс (фиг.8, осц.8, 9). Соответственно этому моменту определяются и начальные сигналы Мз, Iq, Upc (фиг.8, осц.6, 10). При этом сигналы Id и ψ2 определяют номинальное потокосцепление ротора (фиг.8, осц.11, 12).
По мере увеличения сигнала задания ωз напряжение и частота на выходе СБ преобразователя частоты также увеличиваются. При ωз=ωзном выходное напряжение СБ и его частота достигают номинальных значений. Дальнейшее увеличение задания ωз сопровождается постоянством напряжения U=U1ном на выходе СБ (осц.7, 8) и переходом работы АД в зону уменьшения потокосцепления ротора за счет снижения составляющей тока статора Id (фиг.8, осц.11-12). Максимальный момент при этом также уменьшается. При ωз=ωзмах скорость идеального холостого хода устанавливается на максимально заданном уровне, соответствующем fогр (точка 2 на фиг.8 осц.7). Составляющая тока статора и соответствующее ей потокосцепление ротора устанавливаются при этом на минимальном уровне Id2 и ψ22 (осц.11, 12).
Таким образом, использование в структуре частотно-регулируемого асинхронного электропривода векторной системы управления скоростью вращения ротора электродвигателя с организацией четырех контуров управления для регулирования скорости, потокосцепления ротора и составляющих тока статора в соответствии с положениями метода подчиненного регулирования позволило решить задачу работы исполнительного электродвигателя привода с форсированными режимами с 2-3-кратной перегрузкой по моменту в диапазоне скоростей от нуля до номинальной и полуторакратной перегрузкой по скорости при работе привода на скорости выше номинальной с ослаблением потока.
Для создания форсированных режимов работы при надежном функционировании силового блока электропривода в структуру системы управления привода введены: блок коррекции, выполняющий развязку каналов управления и исключающий их взаимное влияние друг на друга, ограничители сигналов задания мо моменту, токам, напряжениям статора АД, обеспечивающие корректное регулирование скорости электродвигателя в зависимости от момента с заданной кратностью перегрузки, функциональный преобразователь, автоматически разделяющий зоны регулирования с форсированными режимами по моменту и скорости, коммутатор и релейные элементы, обеспечивающие логику формирования управляющих сигналов возбуждения электродвигателя и управления скоростью привода, что исключает броски тока в инверторе напряжения и повышает надежность работы силового блока, задатчик интенсивности нарастания скорости ротора электродвигателя, задающий желаемый темп изменения электромагнитного момента и сглаживающий броски и пульсации в сигнале задания.
Предложенное построение системы управления обеспечивает, в сравнении с известными решениями, более высокие динамические показатели за счет повышения быстродействия и точности регулирования координат системы управления привода и надежную работу преобразователя, расширяет сферы применения асинхронного привода, снижает стоимость, габариты, массу двигателя и привода в целом, позволяет экономить материалы, ресурсы и потребляемую приводом энергию.
Источники информации
1. Поздеев А.А. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. - Чебоксары: Из-во Чуваш, ун-та, 1998. - 172 с, аналог.
2. Глазенко Т.А., Герман-Галкин С.Г., Полищук С.Б., Рыдов В.А. Частотно-регулируемые асинхронные электропривода для станков с ЧПУ. - Л., ЛДНТП, 1988. - 28 с, ил.
3. Патент на изобретение №2313894 МПК8 Н02Р 21/12, 27/08 Частотно-регулируемый асинхронный электропривод. Сидоров П.Г., Александров Е.В., Лагун В.В., приоритет изобретения 19.06.2006 г., прототип.
4. Элементы системы управления частотным приводом с подчиненным векторным регулированием / Алексеев В.В., Дартау В.А., Рудаков В.В. - Электротехническая промышленность. Серия Электропривод. - М., 1981. вып.4(93).
5. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1973. - 350 с.
6. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для ABM. - М., Энергия, 1978.
7. Титце У., Шенк К. Полупроводниковая схемотехника. - М.: Мир, 1982.
8. Изосимов Д.Б., Рыбкин С.Е. Широтно-импульсная модуляция трехфазных автономных инверторов. - Электричество, 1997. - №6.
9. Лысенко Е.В. Функциональные элементы релейных устройств на интегральных микросхемах. - М.: Энергоатомиздат, 1983. - 128 с.
10. Шило В.Л. Функциональные аналоговые интегральные микросхемы. - М.: Радио и связь, 1982. - 128 с.
11. Изосимов Д.Б., Рыбкин СЕ. Шевцов СВ. Симплексные алгоритмы управления трехфазным автономным инвертором напряжения с ШИМ. - Электротехника, 1993, №12
12. Преобразователи перемещения. Блоки индикации. Каталог 2001 г. - СПб, ОАО СКБ «ИС», 2001. - 125 с.
13. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. - СПб.: КОРОНА принт, 2001. - 320 с, ил.
14. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. - Л.: Энергоиздат., 1982. - 392 с.
15. Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводы с векторным управлением. - Л., Энергоатомиздат, 1987. - 136 с.
16. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. - М-Л., Госэнергоиздат, 1963. - 744 с.
17. Ремшин Б.И., Ямпольский Д.С Проектирование и наладка систем подчиненного регулирования электроприводов. - М., Энергия, 1975. - 184 с.
18. Козярук А.Е., Рудаков В.В. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов. - С-Пб, Эл. техн. комп., 2004. - 127 с.
19. Датчики-трансформаторы тока и напряжения серии ЛЕМ. Технические условия ТУ 3413-001-00512622-96. - Тверь, ООО «ТВЕЛЕМ». - 1996 - 29 с.
20. Novotny D.W. and Lipo Т.А. Introduction to Field Orientation and High Performance AC Drives Second Edition / IEE Industry Applications Society Annual Meeting. 1986. Section 2
21. Эпштейн И.И. Автоматизированный электропривод переменного тока. - М., Энергоатомиздат, 1982. - 120 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |

Изобретение относится к области электротехники и может быть использовано в электроприводах различного отраслевого применения, построенных на основе асинхронного короткозамкнутого двигателя. Техническим результатом является обеспечение работы электропривода с форсированными параметрами по моменту в два - три раза выше относительно номинального значения и скорости до 1.5ΩНом при обеспечении надежной работы силового блока электропривода. В частотно-регулируемом электроприводе имеются четыре контура управления: контур управления скоростью привода, контур управления потокосцеплением ротора и контуры управления активной и реактивной составляющих вектора тока статора двигателя. Для создания форсированных режимов работы в систему управления введены: блок коррекции, выполняющий развязку каналов управления и исключающий их взаимное влияние, ограничители сигналов задания мо моменту, токам и напряжению статора АД, обеспечивающие корректное регулирование скорости электродвигателя в зависимости от момента с заданной кратностью перегрузки, функциональный преобразователь, автоматически разделяющий зоны регулирования с форсированными моментом и скоростью, блоки, обеспечивающие опережающее формирование потока перед подачей сигнала регулирования скорости электропривода, задатчик интенсивности нарастания скорости ротора электродвигателя, задающий желаемый темп изменения электромагнитного момента и сглаживающий броски и пульсации в сигнале задания. В результате обеспечивается более высокие динамические показатели и надежная работа силового преобразователя, расширяется сфера применения асинхронного привода, уменьшаются стоимость, габариты, масса, экономятся материалы, ресурсы и потребляемая энергия. 5 з.п. ф-лы, 8 ил.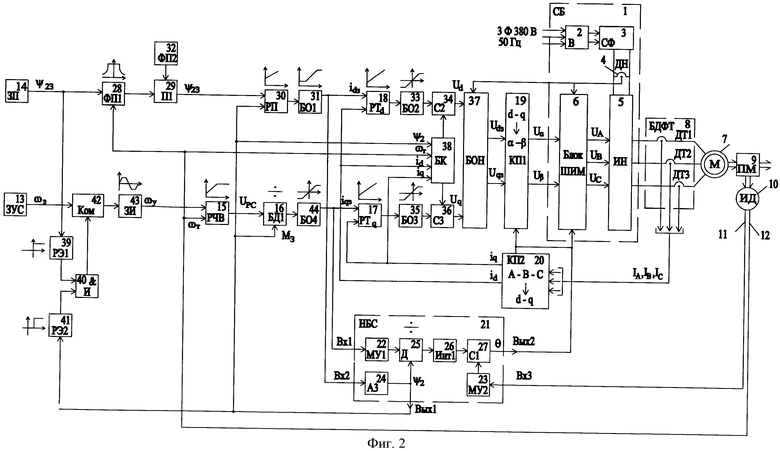
1. Частотно-регулируемый асинхронный электропривод, содержащий силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертор напряжения, управляющие входы которого соединены с выходами блока векторной ШИМ, асинхронный электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, а выходной вал - к датчику скорости вращения его ротора и к передаточному механизму, задатчик текущей угловой скорости электродвигателя, задатчик потокосцепления электродвигателя, последовательно соединенные регулятор частоты вращения, ко второму входу которого подключен выход датчика скорости вращения ротора, и первый блок деления, регуляторы активного и реактивного тока, координатный преобразователь напряжений, выходы которого подключены к входам блока векторной ШИМ, координатный преобразователь токов, соединенный входами к выходам блока датчиков фазных токов, а выходами со вторым входом регулятора реактивного тока и с первым входом регулятора активного тока, наблюдательный блок состояния электропривода, снабженный первым и вторым масштабными усилителями, апериодическим звеном, делителем, первым интегратором и первым сумматором, при этом выход первого масштабного усилителя подключен к первому входу делителя, выход которого через первый интегратор подключен к первому входу первого сумматора, ко второму входу которого подключен выход второго масштабного усилителя, выход первого сумматора подключен к одному из входов блока векторной ШИМ, к входу координатного преобразователя токов и к входу координатного преобразователя напряжений, выход апериодического звена соединен со вторым входом делителя и вторым входом первого блока деления, а датчик скорости вращения ротора электродвигателя выполнен в виде импульсного датчика с двумя выходами, первый из которых является выходом углового положения ротора электродвигателя, а второй - выходом скорости вращения ротора электродвигателя, при этом первый выход импульсного датчика соединен с входом второго масштабного усилителя, отличающийся тем, что в него введены последовательно соединенные первый функциональный преобразователь, первый и второй вход которого соединены соответственно с выходом задатчика потокосцепления и вторым выходом импульсного датчика, первый перемножитель, регулятор потокосцепления, второй вход которого соединен с выходом апериодического звена, и первый блок ограничения, выход которого подключен к первому входу регулятора реактивного тока и входу апериодического звена, второй функциональный преобразователь, выход которого подключен к второму входу первого перемножителя, последовательно соединенные второй блок ограничения, к входу которого подключен регулятор реактивного тока, и второй сумматор, последовательно соединенные третий блок ограничения, к входу которого подключен регулятор активного тока, и третий сумматор, блок ограничения напряжения, к первому и второму входам которого подключены соответственно второй и третий сумматоры, выходы блока ограничения напряжения подключены ко входам координатного преобразователя напряжений, блок коррекции, первый, второй, третий и четвертый входы которого подключены соответственно к первому и второму выходам координатного преобразователя токов, ко второму выходу импульсного датчика и выходу апериодического звена, а первый и второй выходы соответственно - к вторым входам второго и третьего сумматоров, последовательно соединенные первый релейный элемент, вход которого подключен к выходу задатчика потокосцепления, и логический сумматор, второй релейный элемент, вход которого подключен к выходу апериодического звена, а выход - ко второму входу логического сумматора, последовательно соединенные коммутатор, вход которого соединен с выходом задатчика текущей угловой скорости, и задатчик интенсивности, выход которого подключен к первому входу регулятора частоты вращения электродвигателя, а также четвертый блок ограничения, вход которого подключен к выходу первого блока деления, а выход - к второму входу регулятора активного тока и входу первого масштабного усилителя, при этом управляющий вход коммутатора соединен с выходом логического сумматора.
2. Электропривод по п.1, отличающийся тем, что первый функциональный преобразователь содержит последовательно соединенные третий масштабный усилитель, второй блок деления и блок модуля, причем первым и вторым входами функционального преобразователя являются соответственно вход третьего масштабного усилителя и второй вход второго блока деления, а выходом - выход блока модуля.
3. Электропривод по п.1, отличающийся тем, что второй функциональный преобразователь содержит последовательно соединенные задатчик времени нарастания и второй интегратор, а также нелинейный элемент, вход и выход которого соединены соответственно с выходом и вторым входом второго интегратора, выходом второго функционального преобразователя является выход второго интегратора.
4. Электропривод по п.1, отличающийся тем, что блок коррекции содержит последовательно соединенные четвертый масштабный усилитель, дифференциатор и четвертый сумматор, последовательно соединенные пятый масштабный усилитель и второй перемножитель, выход которого подключен ко второму входу четвертого сумматора, последовательно соединенные шестой масштабный усилитель, третий перемножитель и пятый сумматор, а также седьмой масштабный усилитель, при этом вход четвертого масштабного усилителя одновременно подключен ко вторым входам второго и третьего перемножителей и седьмого сумматора, первым входом блока коррекции является вход пятого масштабного усилителя, вторым входом - вход шестого масштабного усилителя, третьим входом - вход четвертого масштабного усилителя, четвертым входом - первый вход седьмого масштабного усилителя, а первым и вторым выходом соответственно - выход четвертого и пятого сумматоров.
5. Электропривод по п.1, отличающийся тем, что блок коррекции обеспечивает компенсацию влияния перекрестных связей на процессы, происходящие в контуре момента электропривода в соответствии с выражениями:
где ψr - модуль потокосцепления ротора;
Ls, Lr, Lm - индуктивности фаз статора, ротора, взаимная;
 - коэффициент рассеяния;
- коэффициент рассеяния;
Id, Iq - проекции векторов напряжения и тока статора на оси d и q;
ωψ - частота вращения вектора потокосцепления ротора;
6. Электропривод по п.1, отличающийся тем, что максимальная величина задания активного тока, формируемого в четвертом блоке ограничения, определяется в соответствии с выражением 
где Км - коэффициент перегрузки по моменту;
Is, Id - номинальные значения векторов тока статора и активного тока.
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ | 2008 |
|
RU2377509C1 |
| US 2005007044 A1, 13.01.2005 | |||
| JP 2007531478 Т, 01.11.2007 | |||
| CN 101132163 А, 27.02.2008. | |||

