Настоящее изобретение относится к обнаружению портативного устройства в транспортном средстве.
УРОВЕНЬ ТЕХНИКИ
[0001] Традиционные системы транспортного средства могут включать в себя пользовательские настройки, передаваемые между транспортными средствами. Пользовательские настройки могут включать в себя предпочтительные радиостанции, предпочтительные настройки климат-контроля и т.д. Однако при использовании одного транспортного средства несколько пассажиров транспортного средства могут иметь разные пользовательские настройки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Заявлена система, содержащая компьютер, включающий в себя процессор и память, причем память хранит команды, выполняемые компьютером для:
приведения в действие множества преобразователей, расположенных в соответствующих заданных местах в транспортном средстве, для генерации множества соответствующих тональных сигналов;
определения множества соответствующих разниц во времени между временем генерации каждого тонального сигнала соответствующим преобразователем и временем обнаружения тонального сигнала портативным устройством; и
определения местоположения портативного устройства, по меньшей мере, частично на основе разниц во времени.
Причем в заявленной системе тональные сигналы являются ультразвуковыми.
В заявленной системе команды дополнительно включают в себя команды для последовательной передачи тональных сигналов от множества преобразователей.
В заявленной системе команды дополнительно включают в себя команды для приема первого уведомления с помощью портативного устройства, генерации первого ультразвукового тонального сигнала от первого преобразователя и передачи уведомления о приеме от портативного устройства при приеме портативным устройством первого ультразвукового тонального сигнала, причем разница во времени представляет собой разницу во времени между первым уведомлением и уведомлением о приеме.
В заявленной системе команды дополнительно включают в себя команды для по существу одновременной передачи тональных сигналов от множества преобразователей.
В заявленной системе команды дополнительно включают в себя команды для записи времени приема для каждого тонального сигнала при приеме портативным устройством, передачи уведомления о приеме, указывающего время приема, и определения разниц во времени на основе времени приема.
В заявленной системе команды дополнительно включают в себя команды для генерации первого ультразвукового тонального сигнала от первого преобразователя, генерации второго ультразвукового тонального сигнала от портативного устройства после приема первого ультразвукового тонального сигнала и определения разницы во времени между генерацией первого ультразвукового тонального сигнала и приемом второго ультразвукового тонального сигнала приемным устройством.
В заявленной системе команды дополнительно включают в себя команды для применения набора пользовательских настроек на основе портативного устройства, определенного как имеющее местоположение с водительской стороны кабины транспортного средства, при приеме приемным устройством тональных сигналов от более чем одного портативного устройства.
В заявленной системе команды дополнительно включают в себя команды для определения местоположения портативного устройства, по меньшей мере частично, на основе расстояния между преобразователями и приемным устройством.
Заявлен способ, содержащий этапы, на которых:
приводят в действие множество преобразователей, расположенных в соответствующих заданных местах в транспортном средстве, для генерации множества соответствующих тональных сигналов;
определяют множество соответствующих разниц во времени между временем генерации каждого тонального сигнала соответствующим преобразователем и временем обнаружения тонального сигнала портативным устройством; и
определяют местоположение портативного устройства по меньшей мере частично на основе разниц во времени.
В заявленном способе тональный сигнал представляет собой ультразвуковой тональный сигнал.
Причем заявленный способ дополнительно содержит этап, на котором последовательно передают тональные сигналы от преобразователей.
Причем заявленный способ дополнительно содержит этапы, на которых принимают первое уведомление с помощью портативного устройства, генерируют первый ультразвуковой тональный сигнал от первого преобразователя и передают уведомление о приеме от портативного устройства при приеме портативным устройством первого ультразвукового тонального сигнала, причем разница во времени представляет собой разницу во времени между первым уведомлением и уведомлением о приеме.
Причем заявленный способ дополнительно содержит этап, на котором по существу одновременно передают тональные сигналы от преобразователей.
Причем заявленный способ дополнительно содержит этапы, на которых записывают время приема для каждого тонального сигнала при приеме портативным устройством, передают уведомление о приеме, указывающее время приема, и определяют разницу во времени на основе времени приема.
Причем заявленный способ дополнительно содержит этапы, на которых генерируют первый ультразвуковой тональный сигнал от первого преобразователя, генерируют второй ультразвуковой тональный сигнал от портативного устройства после приема первого ультразвукового тонального сигнала и определяют разницу во времени между генерацией первого ультразвукового тонального сигнала и приемом второго ультразвукового тонального сигнала приемным устройством.
Причем заявленный способ дополнительно содержит этап, на котором применяют набор пользовательских настроек на основе портативного устройства, определенного как имеющее местоположение с водительской стороны кабины транспортного средства, при приеме приемным устройством тональных сигналов от более чем одного портативного устройства.
Причем заявленный способ дополнительно содержит этап, на котором определяют местоположение портативного устройства, по меньшей мере частично, на основе расстояния между преобразователями и приемным устройством.
Заявлена система, содержащая компьютер, включающий в себя процессор и память, причем память хранит команды, выполняемые компьютером для:
приведения в действие преобразователя в портативном устройстве для генерации тонального сигнала;
определения множества разниц во времени между соответствующим временем обнаружения тонального сигнала множеством приемных устройств, расположенных в заданных местах в транспортном средстве, и временем обнаружения уведомления, причем уведомление, передаваемое портативным устройством, указывает генерацию тонального сигнала; и
определения местоположения портативного устройства по меньшей мере частично на основе разниц во времени.
В заявленной системе тональный сигнал представляет собой ультразвуковой тональный сигнал.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
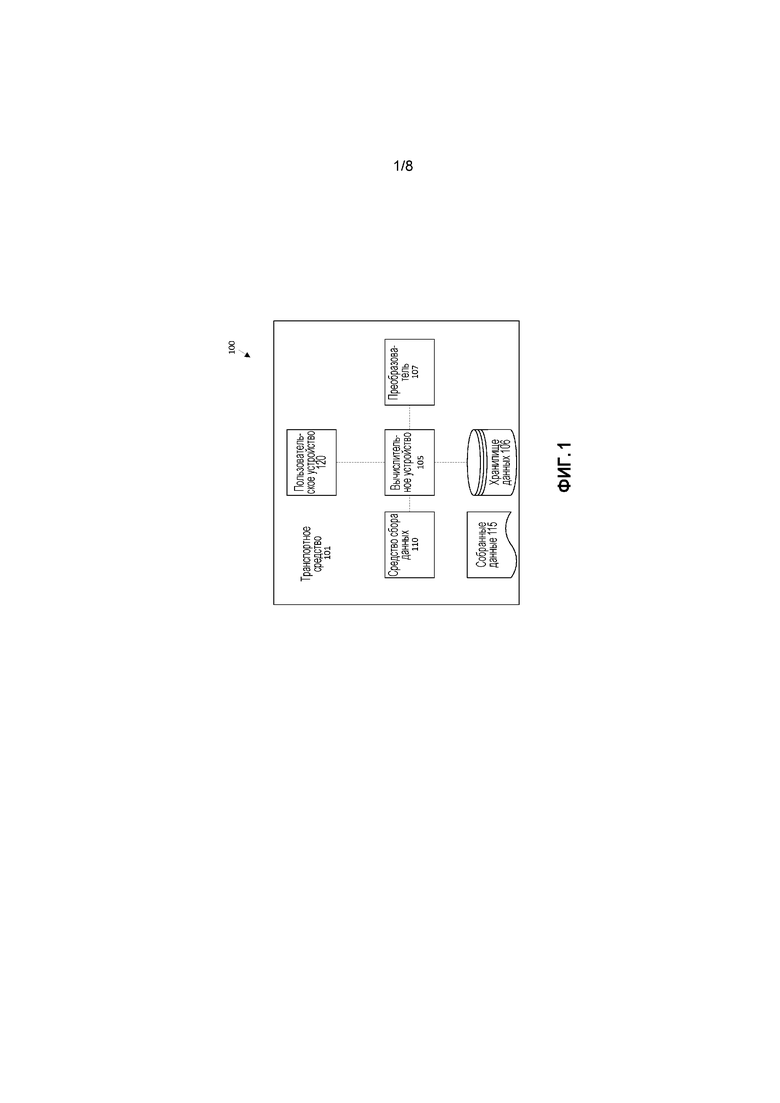
[0002] Фигура 1 представляет собой структурную схему системы определения местоположения портативного устройства в транспортном средстве.
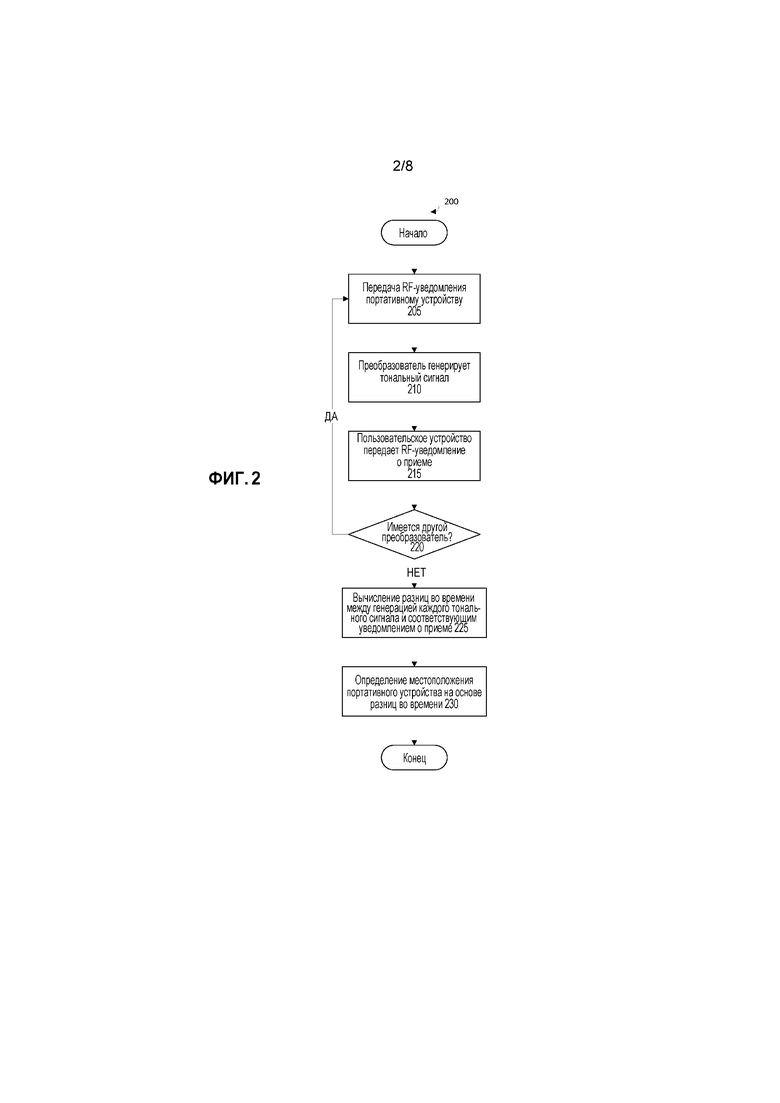
[0003] Фигура 2 представляет собой примерный процесс определения местоположения портативного устройства в транспортном средстве.
[0004] Фигура 3 представляет собой другой примерный процесс определения местоположения портативного устройства в транспортном средстве.
[0005] Фигура 4 представляет собой другой примерный процесс определения местоположения портативного устройства в транспортном средстве.
[0006] Фигура 5 представляет собой другой примерный процесс определения местоположения портативного устройства в транспортном средстве.
[0007] Фигура 6 представляет собой вид сверху транспортного средства с парой портативных устройств.
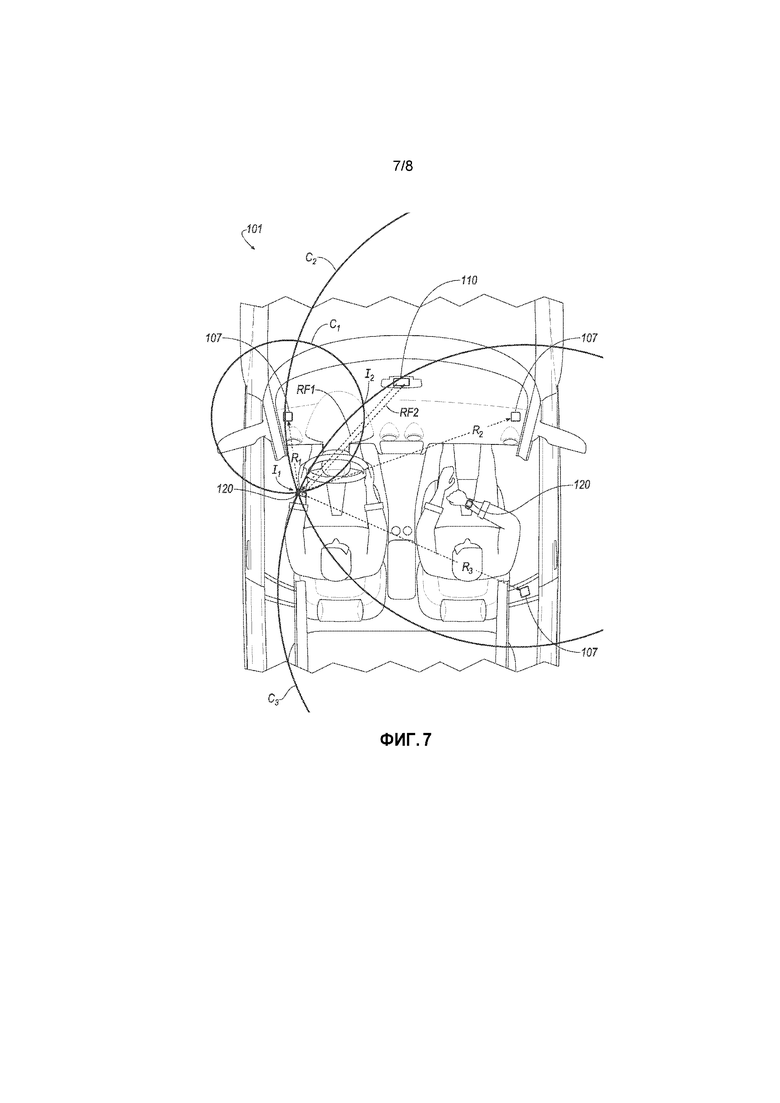
[0008] Фигура 7 представляет собой вид сверху транспортного средства, иллюстрирующий определение местоположения портативных устройств с использованием трилатерации с помощью окружностей.
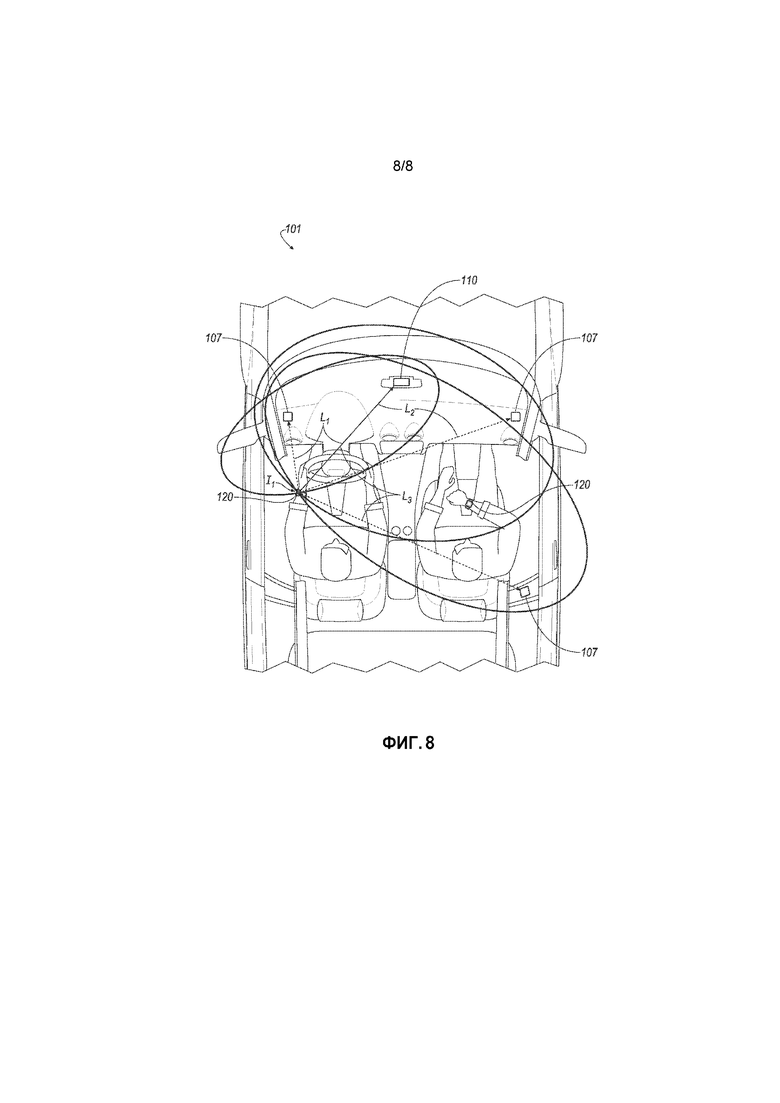
[0009] Фигура 8 представляет собой вид сверху транспортного средства, иллюстрирующий определение местоположения портативных устройств с использованием трилатерации с помощью эллипсов.
ПОДРОБНОЕ ОПИСАНИЕ
[0010] Фигура 1 иллюстрирует систему 100, включающую в себя портативное устройство 120, коммуникативно связанное, например, посредством известного беспроводного протокола, с вычислительным устройством 105 транспортного средства 101. Вычислительное устройство 105 запрограммировано с возможностью приема собранных данных 115 от одного или более средств 110 сбора данных, например, от датчиков транспортного средства 101, в отношении различных показателей, связанных с транспортным средством 101. Например, Показатели могут включать в себя скорость транспортного средства 101, ускорение и/или замедление транспортного средства 101, данные, связанные с траекторией или рулевым управлением транспортного средства 101, звуковые тональные сигналы из кабины транспортного средства 101, биометрические данные, связанные с водителем транспортного средства 101, например, частоту сердечных сокращений, частоту дыхания, расширение зрачков, температуру тела, состояние сознания и т.д. Дополнительные примеры таких показателей могут включать в себя измерения систем и компонентов транспортного средства (например, системы рулевого управления, силовой системы, тормозной системы, внутреннего контроля, наружного контроля и т.д.). Вычислительное устройство 105 может быть запрограммировано с возможностью сбора данных 115 от транспортного средства 101, в котором оно установлено, иногда называемого основным транспортным средством 101, и/или может быть запрограммировано с возможностью сбора данных 115 о втором транспортном средстве 101, например, о целевом транспортном средстве.
[0011] Вычислительное устройство 105 в общем запрограммировано с возможностью связи по шине локальной сети контроллеров (CAN) или т.п. Вычислительное устройство 105 также может иметь соединение с разъемом бортовой диагностики (OBD II). Посредством шины CAN, OBD II и/или других проводных или беспроводных механизмов, например, WiFi, Bluetooth или т.п., вычислительное устройство 105 может передавать сообщения различным устройствам в транспортном средстве 101, например, устройствам 120, рассмотренным ниже, и/или принимать сообщения от различных устройств, например, от контроллеров, исполнительных механизмов, датчиков и т.д., в том числе от средств 110 сбора данных. Альтернативно или дополнительно, в случаях, когда вычислительное устройство 105 фактически содержит множество устройств, шина CAN или т.п. может быть использована для связи между устройствами, представленными в настоящем раскрытии как вычислительное устройство 105.
[0012] Хранилище 106 данных может представлять собой любой известный тип, например, накопители на жестких дисках, твердотельные накопители, серверы или любой энергозависимый или энергонезависимый носитель. Хранилище 106 данных может хранить собранные данные 115, передаваемые от средств 110 сбора данных.
[0013] Транспортное средство 101 может включать в себя один или более преобразователей 107. Преобразователи 107 могут включать в себя известные устройства, которые производят тональные сигналы, т.е. звуковые волны, на различных частотах, например, ультразвуковые тональные сигналы с частотами выше диапазона человеческого слуха (например, выше 20 кГц), дозвуковые тональные сигналы с частотами ниже диапазона человеческого слуха (например, ниже 20 Гц), звуковые волны в диапазоне человеческого слуха и т.д. Преобразователь 107 может быть расположен в различных частях транспортного средства 101, в том числе, например, в приборной панели, двери транспортного средства, стойке транспортного средства и т.д. Как известно, преобразователи 107 могут подавать тональные сигналы на определенных частотах и/или с определенными подписями, так что тональный сигнал может быть определен как переданный от конкретного преобразователя в конкретное время.
[0014] Средства 110 сбора данных могут включать в себя множество устройств. Например, различные контроллеры транспортного средства могут работать в качестве средств 110 сбора данных для передачи данных 115 по шине CAN, например, данных 115, относящихся к скорости, ускорению, функциональности систем и/или компонентов транспортного средства и т.д., для любого количества транспортных средств 101. Кроме того, датчики или т.п. могут быть встроены в транспортное средство и выполнены в качестве средств 110 сбора данных для обеспечения данных напрямую в компьютер 105, например, посредством проводного или беспроводного соединения. Другие средства 110 сбора данных могут включать в себя камеры, микрофоны, алкометры, детекторы движения и т.д., т.е. средства 110 сбора данных для обеспечения данных 115 с целью оценки состояния водителя транспортного средства 101 и/или сбора звуковых и/или визуальных данных из кабины транспортного средства 101. Более того, средства 110 сбора данных могут включать в себя приемное устройство, выполненное с возможностью приема ультразвуковых тональных сигналов от преобразователя 107.
[0015] Собранные данные 115 могут включать в себя множество данных, собранных в транспортном средстве 101. Примеры собранных данных 115 обеспечены выше, и кроме того данные 115 в общем собираются с использованием одного или более средств 110 сбора данных и дополнительно могут включать в себя данные, вычисленные на их основе компьютером 105. В общем собранные данные 115 могут включать в себя любые данные, которые могут быть собраны средствами 110 сбора данных и/или вычислены на основе таких данных.
[0016] Портативное устройство 120 может представлять собой одно из множества вычислительных устройств, включающих в себя процессор и память, а также возможности связи, которое запрограммировано с возможностью ношения на теле оператора. Например, портативное устройство 120 может представлять собой носимое устройство, например, часы или «умные» часы, смартфон, планшетный компьютер, персональный цифровой помощник, пару часы-телефон, вибрирующее устройство и т.д., которое включает в себя возможности для беспроводной связи с использованием IEEE 802.11, Bluetooth и/или протокола сотовой связи. Кроме того, портативное устройство 120 может использовать такие возможности связи для осуществления прямой связи с компьютером 105 транспортного средства, например, с использованием Bluetooth. Портативное устройство 120 может хранить в своей памяти настройки транспортного средства 101, например, предпочтительные настройки развлекательной системы, настройки климат-контроля и т.д., которые водитель или пассажир транспортного средства 101 может применять к транспортному средству 101. Однако если имеется несколько портативных устройств 120, может быть предпочтительно применение настроек портативного устройства 120, связанного с владельцем транспортного средства и/или с человеком на водительском сиденье. Таким образом, настоящая система 100 предпочтительно обеспечивает определение соответствующих местоположений одного или более портативных устройств 120 в транспортном средстве 101 и затем может применять настройки выбранного портативного устройства, например, носимого устройства человека на водительском сиденье соответственно.
[0017] Фигура 2 иллюстрирует процесс 200 определения местоположения портативного устройства 120 в транспортном средстве 101. Процесс 200 начинается на этапе 205, на котором вычислительное устройство 105 передает уведомление портативному устройству 120. Уведомление уведомляет портативное устройство 120 о том, что вычислительное устройство 105 начинает определять местоположение портативного устройства 120. Уведомление может представлять собой радиочастотный (RF) сигнал, например, RF1, показанный на Фигуре 7, передаваемый, например, по сети, в том числе WiFi, Bluetooth и т.д.
[0018] Затем на этапе 210 вычислительное устройство 105 передает команду первому преобразователю 107 на генерацию первого тонального сигнала. Первый тональный сигнал может представлять собой ультразвуковой тональный сигнал, т.е. звуковую волну с частотой, превышающей 20 кГц, который может находиться за пределами обычного известного диапазона человеческого слуха, но в пределах способности обнаружения звука портативного устройства 120. Первый тональный сигнал может приниматься портативным устройством 120 в транспортном средстве 101. Вычислительное устройство 105 записывает время передачи команды. Вычислительное устройство 105 может передавать команду первому преобразователю 107 по существу одновременно с начальным уведомлением.
[0019] Затем на этапе 215 портативное устройство 120 передает первое уведомление о приеме после приема первого тонального сигнала. Первое уведомление о приеме может представлять собой RF-сигнал, так что вычислительное устройство 105 может принимать первое уведомление о приеме почти сразу после приема портативным устройством 120 первого тонального сигнала. После приема уведомления о приеме приемным устройством вычислительном устройство 105 записывает время приема.
[0020] Затем на этапе 220 вычислительное устройство 105 определяет, имеется ли другой преобразователь 107, который должен передать соответствующий тональный сигнал. Например, транспортное средство 101 может включать в себя три преобразователя 107, и вычислительное устройство 105 может повторять этапы 205-215 для каждого преобразователя. Если вычислительное устройство 105 определяет, что другой преобразователь 107 должен передать тональный сигнал, процесс возвращается на этап 205 для повторения этапов 205-215. Если все преобразователи 107 сгенерировали свои тональные сигналы, процесс продолжается на этапе 225.
[0021] На этапе 225 вычислительное устройство 105 определяет соответствующие разницы во времени между каждым уведомлением и соответствующим уведомлением о приеме. Вычислительное устройство 105 сравнивает записанное время для каждого уведомления с записанным временем для каждого ответного уведомления для определения разницы во времени для каждого преобразователя 107. Например, первая разница TD1 во времени представляет собой время между первым начальным уведомлением, переданным вычислительным устройством 105, и первым ответным уведомлением, принятым вычислительным устройством 105. Вычислительное устройство 105 повторяет вычисление разницы во времени для всех преобразователей 107. В другом примере вычислительное устройство 105 может учитывать запаздывание во времени уведомлений и уведомлений о приеме, если время RF-распространения для уведомлений и уведомлений о приеме является достаточно большим, чтобы влиять на разницы во времени.
[0022] Затем на этапе 230 вычислительное устройство 105 определяет местоположение портативного устройства 120 на основе разниц во времени, и процесс 200 завершается. Местоположение может быть определено с использованием трилатерации на основе расстояния от портативного устройства 120 до преобразователей 107. Трилатерация в данном контексте относится к известной технологии определения расстояний между точками с использованием геометрических характеристик окружностей, треугольников, эллипсов, эллипсоидов и/или сфер. Расстояние от первого преобразователя 107 до приемного устройства T1 известно вычислительному устройству 105 и является фиксированным, например, когда первый преобразователь 107 установлен на неподвижной поверхности, как показано на Фигуре 6. Если первый преобразователь 107, например, установлен в двери транспортного средства 101, расстояние T1 может быть определено, когда дверь транспортного средства 101 закрыта, обеспечивая постоянное измерение для T1. В другом примере дверь транспортного средства 101 может включать в себя средства 110 сбора данных, например, датчики угла, для определения угла открытой двери транспортное средство 101, и расстояние T1 может быть определено на основе измерения от средств 110 сбора данных. То есть, если первый преобразователь 107 находится в заданном месте, которое не зафиксировано, расстояние T1 может быть определено с помощью дополнительных средств 110 сбора данных.
[0023] Расстояние от первого преобразователя 107 до портативного устройства 120 может быть определено следующим образом:
где R1 - расстояние от первого преобразователя 107 до портативного устройства 120, vs - скорость звука в воздухе, и TD1 - первая разница во времени. Расстояние определяет радиус, вдоль которого может находиться портативное устройство 120 от первого преобразователя 107, как показано на Фигуре 7. Однако это расстояние R1 самостоятельно не может определять местоположение портативного устройства 120, как дополнительно описано ниже.
[0024] Расстояния от второго и третьего преобразователей 107 до портативного устройства 120 могут быть определены подобным образом, обеспечивая второе расстояние R2 и третье расстояние R3 соответственно, как показано на Фигуре 7. Каждое расстояние определяет радиус с соответствующим преобразователем 107 в центре, вдоль которого находится портативное устройство. Три расстояния пересекаются в одной точке, а именно в местоположении портативного устройства 120 в транспортном средстве 101, как показано на Фигуре 7. То есть местоположение портативного устройства 120 определяется на основе разниц во времени с использованием трилатерации. Если преобразователи 107 не находятся в одной плоскости, т.е. находятся на разной высоте относительно, например, пола транспортного средства 101, то радиусы R1, R2, R3 образуют сферы вокруг преобразователей 107. Сферы подобным образом пересекаются в одной точке, которая представляет собой местоположение портативного устройства 120.
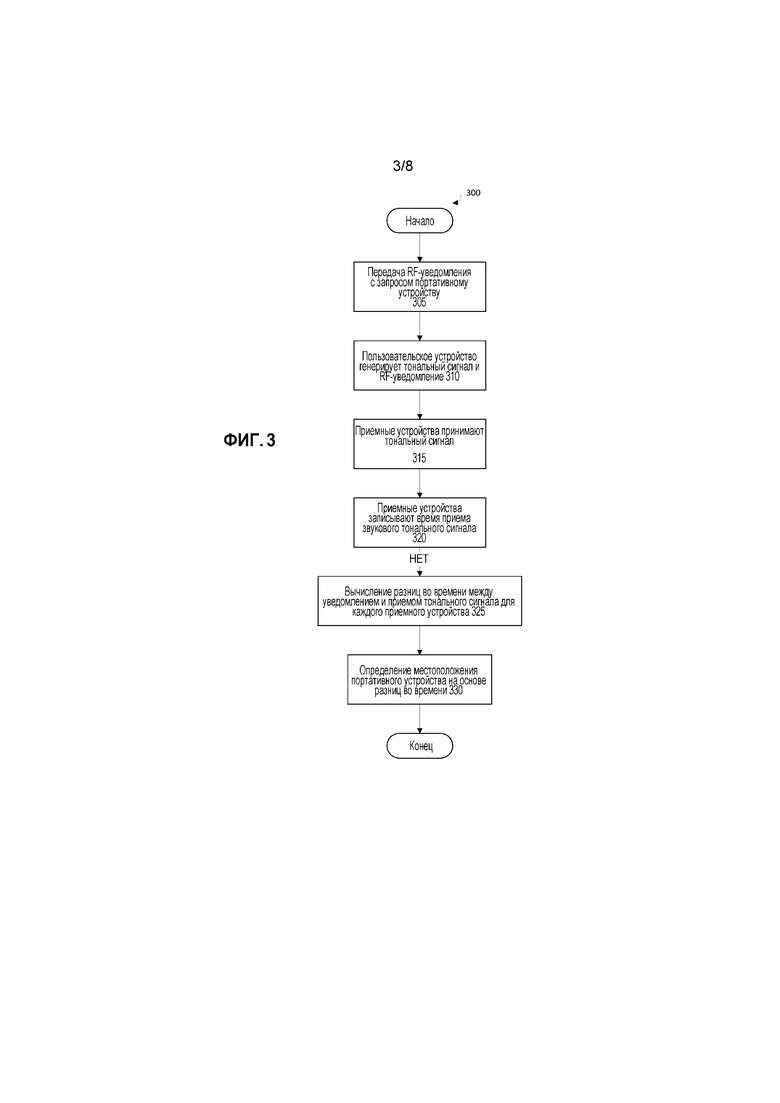
[0025] Фигура 3 иллюстрирует другой примерный процесс 300 определения местоположения портативного устройства 120 в транспортном средстве 101. Процесс 300 начинается на этапе 305, на котором вычислительное устройство 105 передает команду портативному устройству 120 на генерацию тонального сигнала. Команда может представлять собой уведомление, передаваемое посредством RF-сигнала, например, RF1, как показано на Фигуре 7.
[0026] Затем на этапе 310 портативное устройство 120 генерирует тональный сигнал. Тональный сигнал может представлять собой ультразвуковой тональный сигнал, т.е. имеет частоту, превышающую 20 кГц, и передается по воздуху в транспортном средстве 101. Тональный сигнал может альтернативно иметь частоту 20 кГц или ниже. Портативное устройство 120 также передает уведомление о приеме, например, RF2, как показано на Фигуре 7, вычислительному устройству 105, указывающее генерацию тонального сигнала.
[0027] Затем на этапе 315 множество средств 110 сбора данных, например, приемных устройств, принимают тональный сигнал. Средства 110 сбора данных могут быть расположены в тех же местах, что и преобразователи 107, показанные на Фигурах 6-8.
[0028] Затем на этапе 320 каждое приемное устройство записывает время приема тонального сигнала.
[0029] Затем на этапе 325 вычислительное устройство 105 собирает время приема тонального сигнала для каждого приемного устройства и вычисляет соответствующую разницу во времени для каждого приемного устройства. Как описано выше в отношении этапа 225, вычислительное устройство сравнивает время уведомления о приеме с временем приема тонального сигнала для определения разницы во времени для каждого приемного устройства.
[0030] Затем на этапе 330 вычислительное устройство 105 определяет местоположение портативного устройства 120 на основе разниц во времени, и процесс 300 завершается. Как и на этапе 230, описанном выше, вычислительное устройство 105 использует разницы во времени для определения радиусов вокруг приемных устройств, на основе которых определяется местоположение портативного устройства 120 с использованием трилатерации, как показано на Фигуре 7.
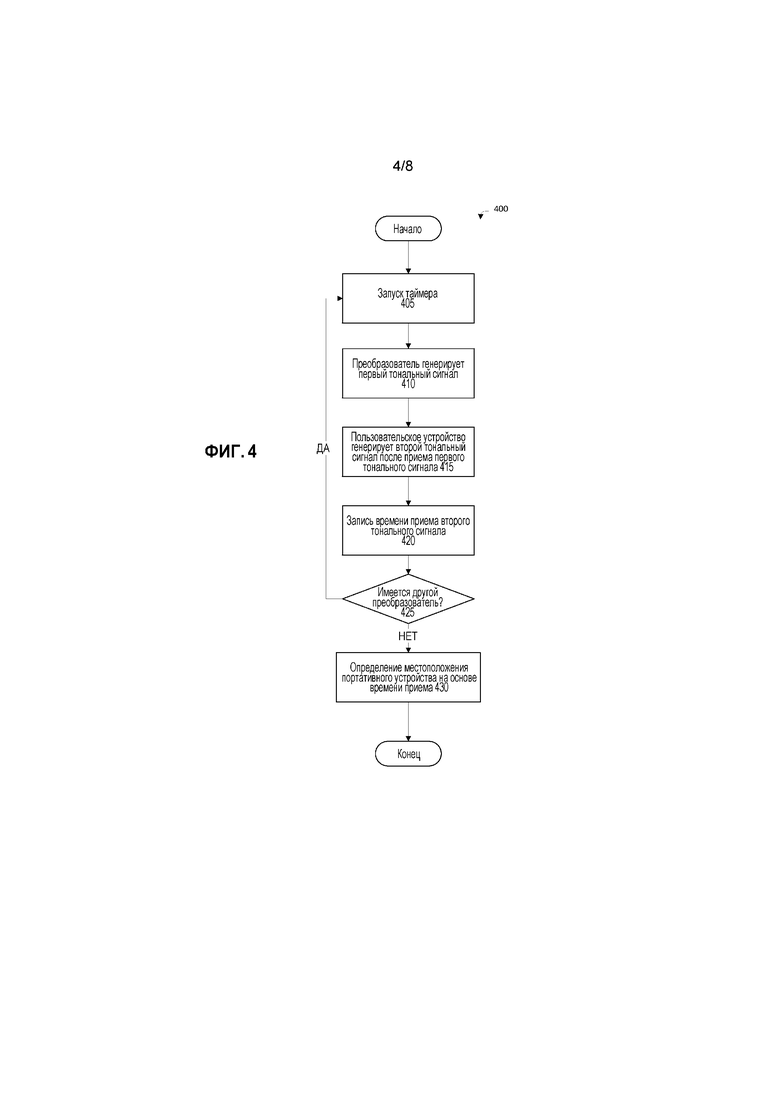
[0031] Фигура 4 иллюстрирует другой примерный процесс 400 определения местоположения портативного устройства 120. Процесс 400 начинается на этапе 405, на котором вычислительное устройство 105 запускает таймер, например, начинает запись периодов времени.
[0032] Затем на этапе 410 вычислительное устройство 105 передает команду на приведение в действие первого преобразователя 107 для генерации первого тонального сигнала. Тональный сигнал может представлять собой, например, ультразвуковой тональный сигнал.
[0033] Затем на этапе 415 портативное устройство 120 после приема первого тонального сигнала генерирует второй тональный сигнал. Второй тональный сигнал может представлять собой, например, ультразвуковой тональный сигнал.
[0034] Затем на этапе 420 вычислительное устройство 105 принимает второй тональный сигнал с помощью приемного устройства и записывает время приема второго тонального сигнала.
[0035] Затем на этапе 425 вычислительное устройство 105 определяет, имеются ли другие преобразователи 107, которые не сгенерировали тональные сигналы. Если да, вычислительное устройство 105 повторяет этапы 405-420 для каждого преобразователя 107. Если все преобразователи 107 сгенерировали тональные сигналы, процесс продолжается на этапе 430.
[0036] На этапе 430 вычислительное устройство 105 определяет местоположение портативного устройства 120 на основе времени приема. Как показано в примере на Фигуре 6, расстояние между преобразователями 107 и приемным устройством известно для всех преобразователей. Как показано на Фигуре 8, каждый преобразователь и приемное устройство служат в качестве фокусов, которые определяют эллипс, имеющий большую ось, образованную портативным устройством 120. Например, первая большая ось может быть определена как:
где L1 - большая ось первого эллипса, vs - скорость звука в воздухе, которая известна, и TD1 - время приема второго тонального сигнала для первого преобразователя 107. На основе большой оси L1 и местоположения первого преобразователя 107 и приемного устройства вычислительное устройство 105 может определять эллипс, на котором должно находиться портативное устройство 120. Вычислительное устройство 105 может определять эллипсы для всех преобразователей 107; например, если транспортное средство 101 включает в себя три преобразователя 107, вычислительное устройство 105 может определять большие оси L2, L3 для второго и третьего преобразователей соответственно, и, таким образом, определять в общем три эллипса. Три эллипса пересекаются в одной точке, которая является местоположением портативного устройства 120. То есть вычислительное устройство 105 может использовать трилатерацию для определения местоположения портативного устройства 120 с использованием эллипсов, образованных местоположениями преобразователей и приемных устройств и большой осью для каждого эллипса, которая определяется временем приема. Если преобразователи 107 не находятся в одной плоскости, как описано выше большие оси L1, L2, L3 образуют эллипсоиды, которые пересекаются в местоположении портативного устройства 120.
[0037] Вычислительное устройство 105 альтернативно может сравнивать время приема для определения местоположения портативного устройства 120. Например, как показано на Фигурах 6-8, первый преобразователь 107 может быть расположен перед водителем транспортного средства, второй преобразователь 107 может быть расположен перед пассажиром транспортного средства, и третий преобразователь 107 может быть расположен за пассажиром транспортного средства. Первый преобразователь 107 обеспечивает первое время TD1 приема, второй преобразователь 107 обеспечивает второе время TD2 приема, и третий преобразователь 107 обеспечивает третье время TD3 приема. Поскольку первый преобразователь 107 расположен ближе всего к водителю транспортного средства, если TD1 меньше, чем любое из TD2 или TD3 (т.е. TD1<TD2,TD3), то портативное устройство 120 расположено ближе всего к первому преобразователю 107, и портативное устройство 120 может быть расположено вблизи водителя транспортного средства. Подобным образом, если TD2<TD1,TD3, то портативное устройство 120 может быть расположено вблизи пассажира транспортного средства на переднем пассажирском сиденье. И если TD3<TD1,TD2, то портативное устройство 120 может быть расположено на заднем пассажирском сиденье.
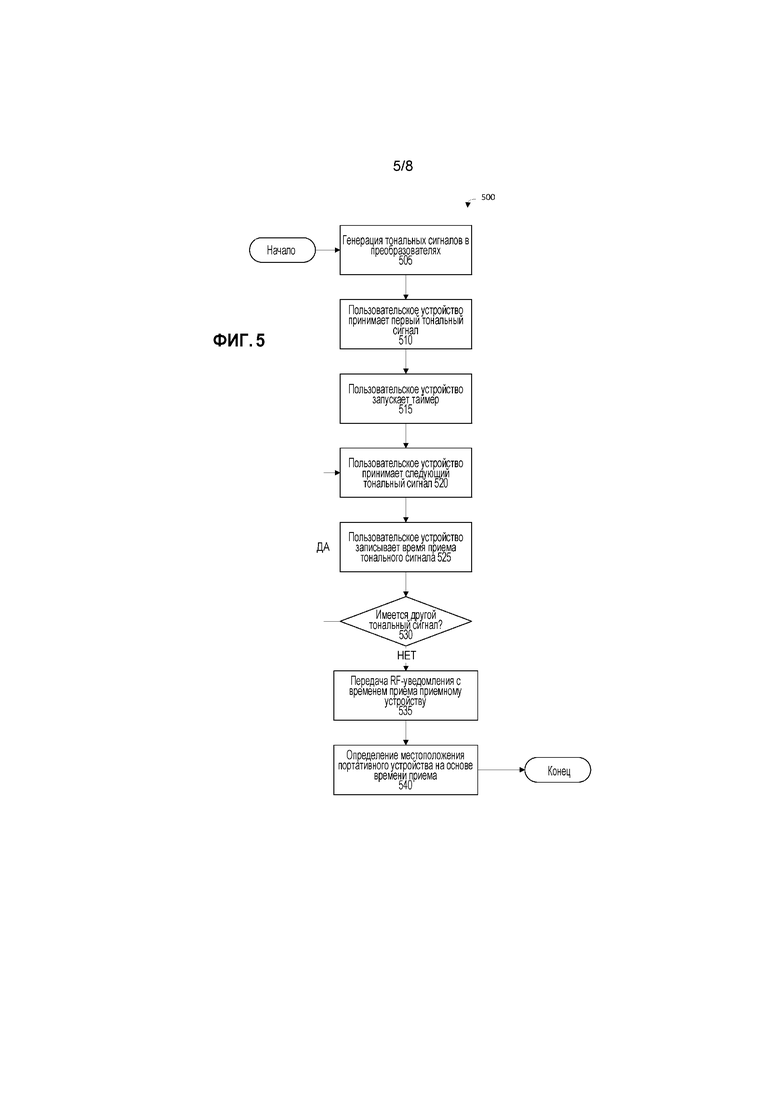
[0038] Фигура 5 иллюстрирует другой примерный процесс 500 определения местоположения портативного устройства 120. Процесс 500 начинается на этапе 505, на котором вычислительное устройство 105 передает команду всем преобразователям 107 на одновременную генерацию тональных сигналов.
[0039] Затем на этапе 510 портативное устройство 120 принимает первый тональный сигнал.
[0040] Затем на этапе 515 портативное устройство 120 запускает таймер после приема первого тонального сигнала.
[0041] Затем на этапе 520 портативное устройство 120 принимает другой тональный сигнал.
[0042] Затем на этапе 525 после приема тонального сигнала портативное устройство 120 записывает время приема тонального сигнала от таймера. Время приема представляет собой разницу во времени между приемом первого тонального сигнала и приемом текущего тонального сигнала.
[0043] Затем на этапе 530 портативное устройство 120 определяет, все ли тональные сигналы были приняты. Портативное устройство 120 может знать количество преобразователей 107 и может быть запрограммировано с возможностью приема такого же количества тональных сигналов. То есть портативное устройство 120 будет записывать время приема тональных сигналов для каждого преобразователя 107. Если портативное устройство 120 приняло не все тональные сигналы, процесс 500 возвращается на этап 520 и повторяет этапы 520-530 для всех преобразователей 107. Альтернативно, процесс 500 может собирать максимальное количество тональных сигналов в течение заданного временного окна. В противном случае, процесс продолжается на этапе 535.
[0044] На этапе 535 портативное устройство 120 передает уведомление о приеме приемному устройству для обеспечения информации вычислительному устройству 105 с временем приема для каждого преобразователя 107.
[0045] Затем на этапе 540 вычислительное устройство определяет местоположение портативного устройства 120 на основе времени приема. Как показано на Фигуре 7 и описано в процессах 200, 300, вычислительное устройство 105 может определять положение портативного устройства 120 в соответствии с трилатерацией с использованием времени приема для определения радиусов, определяющих окружности вокруг преобразователей 107; причем пересечение окружностей представляет собой местоположение портативного устройства 120.
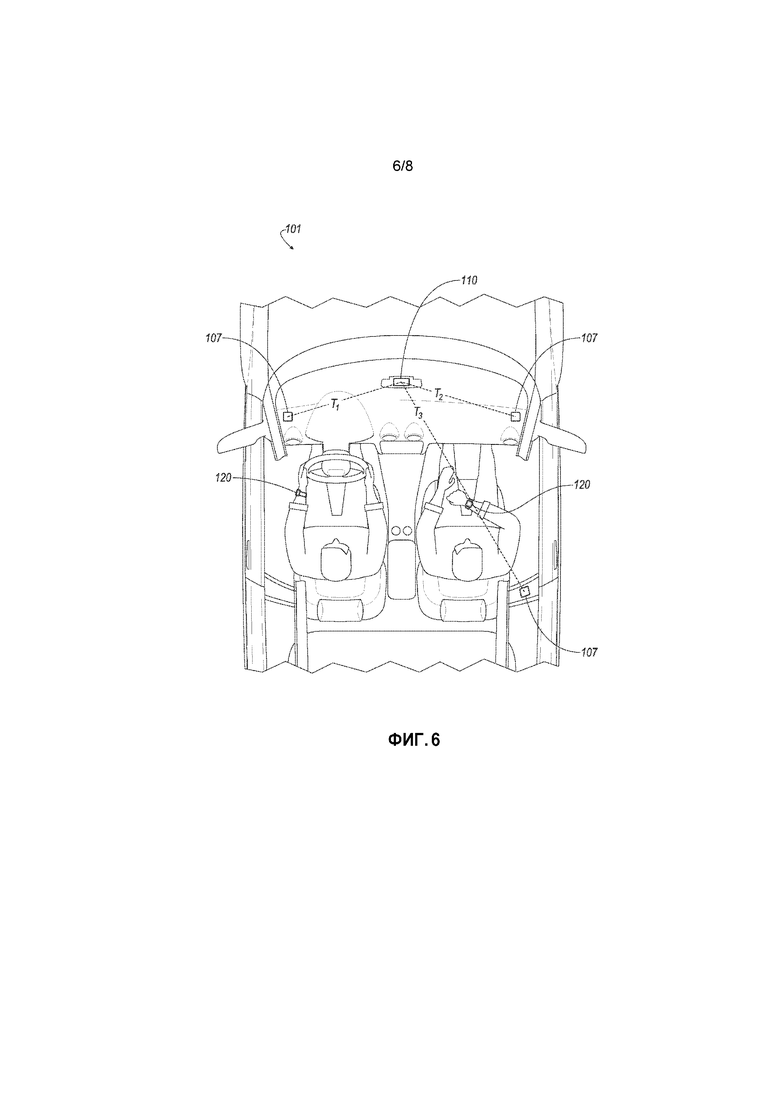
[0046] Фигура 6 иллюстрирует часть примерного транспортного средства 101, в том числе преобразователи 107, расположенные в приборной панели транспортного средства 101 и в двери транспортного средства 101. Средство 101 сбора данных, например, приемное устройство, может быть расположено в зеркале заднего вида транспортного средства 101. В этом примере в транспортном средстве 101 расположено два портативных устройства 120, например «умные» часы. Одно из портативных устройств 120 может быть надето на запястье водителя транспортного средства и показано близко к рулевому колесу транспортного средства 101, на котором может находиться запястье водителя. Другое портативное устройство 120 может быть надето на запястье человека на пассажирском сиденье транспортного средства 101. После применения одного из процессов 200-500 может быть определено местоположение портативного устройства 120 на водителе (вблизи рулевого колеса), и могут быть применены настройки транспортного средства 101 от портативного устройства 120 водителя. В частности, портативное устройство 120 может быть определено как находящееся с водительской стороны кабины транспортного средства 101, и вычислительное устройство 105 может применять пользовательские настройки от этого портативного устройства 120 и игнорировать портативное устройство 120, находящееся с пассажирской стороны кабины транспортного средства 101.
[0047] Фигура 6 иллюстрирует расстояния между преобразователями 107 и приемным устройством, представляющим собой средство 110 сбора данных. Расстояние T1 представляет собой расстояние от средства 110 сбора данных до первого преобразователя 107; расстояние T2 представляет собой расстояние от средства 110 сбора данных до второго преобразователя 107; расстояние T3 представляет собой расстояние от средства 110 сбора данных до третьего преобразователя 107. Расстояния T1, T2, T3 известны и могут быть сохранены в хранилище 106 данных.
[0048] Фигура 7 иллюстрирует часть примерного транспортного средства 101. Как описано в процессах 200, 300 и 500, вычислительное устройство 105 использует разницы во времени для определения расстояний от преобразователей 107 до портативного устройства 120 с помощью трилатерации. Например, как показано на Фигуре 6, расстояние T1 от первого преобразователя 107 до приемного устройства предварительно определено и сохранено в хранилище 106 данных. Приемное устройство принимает уведомление RF2 о приеме от портативного устройства 120 и определяет разницу TD1 во времени между первым тональным сигналом и первым ответным тональным сигналом, например, количество времени между уведомлением RF1 и уведомлением RF2 о приеме. Вместе с первым преобразователем 107 расстояние R1 определяет окружность C1 вокруг преобразователя 107, на которую попадает портативное устройство 120.
[0049] Расстояние T2, показанное на Фигуре 6, от второго преобразователя 107 до приемного устройства известно и сохранено в хранилище 106 данных. Разница TD2 во времени определяется подобно разнице TD1, описанной выше. На основе разницы TD2 во времени определяется расстояние R2 и образованная окружность C2 вокруг второго преобразователя 107. Окружность C1 и окружность C2 пересекаются в двух точках I1 и I2, и, исходя из вычислений от двух преобразователей, портативное устройство 120 может находиться в любой точке I1 или I2.
[0050] Расстояние T3, показанное на Фигуре 6, от третьего преобразователя 107 до приемного устройства известно и сохранено в хранилище 106 данных. Разница TD3 во времени определяется подобно разницам TD1 и TD2. На основе разницы TD3 во времени определяется расстояние R3 и образованная окружность C3 вокруг третьего преобразователя 107. Окружности C1, C2, C3 пересекаются в одной точке I1, которая представляет собой местоположение портативного устройства 120, т.е. находится с водительской стороны транспортного средства 101.
[0051] Фигура 7 иллюстрирует два портативных устройства 120, и описанные выше вычисления могут быть подобным образом применены в отношении второго портативного устройства 120. В данном случае второе портативное устройство 120 расположено с пассажирской стороны транспортного средства 101. Таким образом, вычислительное устройство 105, определившее местоположение обоих портативных устройств 120, может применять настройки только от портативного устройства 120 с водительской стороны транспортного средства 101.
[0052] Фигура 7 дополнительно иллюстрирует уведомление и уведомление о приеме. Средство 110 сбора данных, например, RF-антенна, может передавать и принимать RF-сигналы, например, по сети 120, и передавать сигналы вычислительному устройству 105. Например, вычислительное устройство 105 может передавать уведомление в виде RF-сигнала RF1 для начала, например, процессов 200, 300. Портативное устройство 120 может передавать уведомление о приеме в виде RF-сигнала RF2 для передачи данных, касающихся, например, времени приема тональных сигналов, времени передачи тональных сигналов и т.д.
[0053] Фигура 8 иллюстрирует другую часть другого примерного транспортного средства 101, в том числе два портативных устройства 120, которые расположены в соответствии с описанным выше процессом 400 с использованием вычисления на основе эллипсов. Как описано выше, преобразователь 107 и приемное устройство представляют собой фокусы эллипса, и портативное устройство 120 образует большую ось эллипса. Например, большая ось L1 представляет собой расстояние от преобразователя 107 до портативного устройства 120, прибавленное к расстоянию от портативного устройства 120 до приемного устройства. Большие оси L2, L3 могут быть подобным образом образованы для других преобразователей 107. После повтора для каждого из трех преобразователей 107 три эллипса пересекаются в одной точке I1, которая представляет собой местоположение портативного устройства 120.
[0054] В данном контексте наречие «по существу», определяющее прилагательное означает, что форма, структура, измерение, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, измерения, значения, вычисления и т.д., вследствие недостатков материалов, обработки, изготовления, измерений датчиков, вычислений, времени обработки, времени связи и т.д.
[0055] Каждое из вычислительных устройств 105 в общем включает в себя команды, выполняемые одним или более вычислительными устройствами, такими как указаны выше, для выполнения описанных выше блоков или этапов процессов. Выполняемые компьютером команды могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включая без ограничения и либо отдельно, либо в сочетании Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем процессор (например, микропроцессор) принимает команды, например, из памяти, с машиночитаемого носителя и т.д., и исполняет эти команды, тем самым выполняя один или более процессов, включая один или более описанных в настоящем документе процессов. Такие команды и другие данные могут храниться и передаваться с использованием множества машиночитаемых носителей. Файл в вычислительном устройстве 105 в общем представляет собой совокупность данных, хранимых на машиночитаемом носителе, например, носителе данных, оперативном запоминающем устройстве и т.д.
[0056] Машиночитаемый носитель включает в себя любой носитель, который участвует в обеспечении данных (например, команд), которые могут быть считаны компьютером. Такой носитель может принимать множество форм, включая, но не ограничиваясь, энергонезависимый носитель, энергозависимый носитель и т.д. Энергонезависимый носитель включает в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимый носитель включает в себя динамическую память с произвольным доступом (DRAM), которая обычно представляет собой оперативную память. Общие формы машиночитаемого носителя включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационные карты, бумажную ленту, любой другой физический носитель со схемами расположения отверстий, RAM, PROM, EPROM, FLASH EEPROM, любой другой чип или картридж памяти или любой другой носитель, который может считываться компьютером.
[0057] В отношении описанных в настоящем документе носителей, процессов, систем, способов и т.д. следует понимать, что хотя этапы таких процессов и т.д. описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть осуществлены с описанными этапами, выполняемыми в порядке, отличном от описанного в настоящем документе порядка. Дополнительно следует понимать, что определенные этапы могут быть выполнены одновременно, что могут быть добавлены другие этапы, или что определенные описанные в настоящем документе этапы могут быть опущены. Например, в процессе 200 один или более этапов могут быть опущены, или этапы могут быть выполнены в порядке, отличном от показанного на Фигуре 2. Другими словами, в настоящем документе описания систем и/или процессов обеспечены в целях иллюстрации некоторых вариантов выполнения, и не должны никоим образом быть истолкованы так, чтобы ограничивать раскрытый объект.
[0058] Соответственно, следует понимать, что настоящее изобретение, включая приведенное выше описание, приложенные чертежи и нижеследующую формулу изобретения, предназначено для иллюстрации, а не для ограничения. Многие варианты выполнения и применения, отличные от обеспеченных примеров, будут очевидны специалисту в области техники при прочтении приведенного выше описания. Объем охраны изобретения должен быть определен не со ссылкой на приведенное выше описание, а со ссылкой на формулу изобретения, приложенную к настоящему документу и/или включенную в непредварительную заявку на патент на основе настоящего документа, вместе с полным объемом охраны эквивалентов, на которые такая формула изобретения имеет право. Ожидается и предполагается, что будущие разработки будут возникать в рассмотренном в настоящем документе уровне техники, и что раскрытые системы и способы будут включены в такие будущие варианты выполнения. В заключение, следует понимать, что раскрытый объект допускает преобразования и изменения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНОЕ ОБНАРУЖЕНИЕ ОРУЖЕЙНОГО ВЫСТРЕЛА | 2014 |
|
RU2679338C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2702292C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| СИСТЕМА ДЛЯ УСОВЕРШЕНСТВОВАННОГО УПРАВЛЕНИЯ СПЕЦИАЛЬНЫМИ СВЕТОВЫМИ СИГНАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2668356C2 |
| ИЗБЕГАНИЕ УДАРА В ДНИЩЕ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2707485C2 |
| СИСТЕМА И СПОСОБ ЗАПУСКА РАБОЧЕГО ТРАНСПОРТНОГО СРЕДСТВА С ЦИКЛИЧЕСКОЙ РАБОТОЙ ДВИГАТЕЛЯ | 2017 |
|
RU2735117C2 |
| УСТРОЙСТВО ДАТЧИКА, СЕРВЕР, СИСТЕМА ДЛЯ ДИАГНОСТИКИ УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ И СПОСОБ ОБРАБОТКИ УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ | 2013 |
|
RU2627638C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| СПОСОБ И ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ РЕСАЙКЛИНГОВЫХ КАССЕТ | 2022 |
|
RU2808092C1 |
| СПОСОБ И ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ РЕСАЙКЛИНГОВЫХ КАССЕТ | 2023 |
|
RU2838029C2 |
Изобретение относится к вычислительной технике. Технический результат заключается в обеспечении возможности определения местоположения портативного устройства в транспортном средстве. Множество преобразователей, расположенных в соответствующих заданных местах в транспортном средстве, приводится в действие для генерации множества соответствующих тональных сигналов. Определяется множество соответствующих разниц во времени между временем генерации каждого соответствующего тонального сигнала соответствующим преобразователем и временем обнаружения тонального сигнала портативным устройством. На основе разниц во времени определяется местоположение портативного устройства. 3 н. и 17 з.п. ф-лы, 8 ил.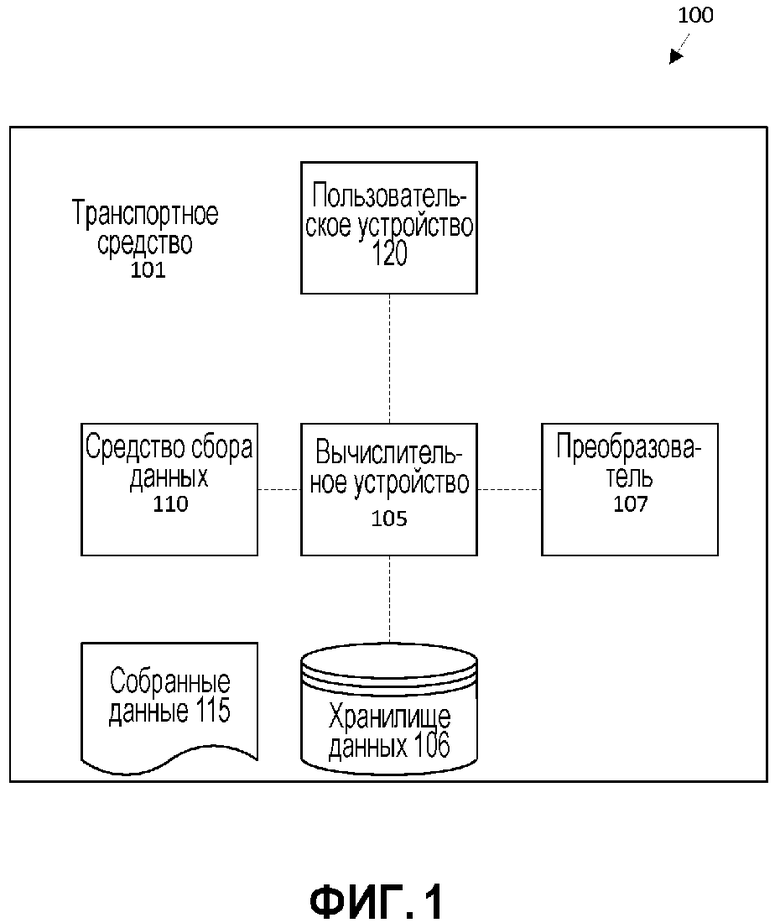
1. Система определения местоположения портативного устройства в транспортном средстве, содержащая компьютер, включающий в себя процессор и память, причем память хранит команды, выполняемые компьютером для:
приведения в действие множества преобразователей, расположенных в соответствующих заданных местах в транспортном средстве, для генерации множества соответствующих тональных сигналов, где вычислительное устройство выполнено с возможностью передачи команды первому преобразователю на генерацию первого тонального сигнала, если вычислительное устройство определяет, что другой преобразователь должен передать тональный сигнал, то вычислительное устройство передает команду следующему преобразователю на генерацию тонального сигнала;
определения множества соответствующих разниц во времени между временем генерации каждого тонального сигнала соответствующим преобразователем и временем обнаружения тонального сигнала портативным устройством;
определения местоположения портативного устройства, по меньшей мере, частично на основе разниц во времени, определяя расстояние между преобразователями и портативным устройством; и
применения набора пользовательских настроек, ассоциированного с водителем транспортного средства, при определении, что местоположение портативного устройства находится с водительской стороны кабины транспортного средства.
2. Система по п. 1, в которой тональные сигналы являются ультразвуковыми.
3. Система по п. 1, в которой команды дополнительно включают в себя команды для последовательной передачи тональных сигналов от множества преобразователей.
4. Система по п. 3, в которой команды дополнительно включают в себя команды для приема первого уведомления с помощью портативного устройства, генерации первого ультразвукового тонального сигнала от первого преобразователя и передачи уведомления о приеме от портативного устройства при приеме портативным устройством первого ультразвукового тонального сигнала, причем разница во времени представляет собой разницу во времени между первым уведомлением и уведомлением о приеме.
5. Система по п. 1, в которой команды дополнительно включают в себя команды для по существу одновременной передачи тональных сигналов от множества преобразователей.
6. Система по п. 5, в которой команды дополнительно включают в себя команды для записи времени приема для каждого тонального сигнала при приеме портативным устройством, передачи уведомления о приеме, указывающего время приема, и определения разниц во времени на основе времени приема.
7. Система по п. 1, в которой команды дополнительно включают в себя команды для генерации первого ультразвукового тонального сигнала от первого преобразователя, генерации второго ультразвукового тонального сигнала от портативного устройства после приема первого ультразвукового тонального сигнала и определения разницы во времени между генерацией первого ультразвукового тонального сигнала и приемом второго ультразвукового тонального сигнала приемным устройством.
8. Система по п. 1, в которой команды дополнительно включают в себя команды для применения набора пользовательских настроек при приеме приемным устройством тональных сигналов от более чем одного портативного устройства.
9. Система по п. 1, в которой команды дополнительно включают в себя команды для определения местоположения портативного устройства, по меньшей мере частично, на основе расстояния между преобразователями и приемным устройством.
10. Способ определения местоположения портативного устройства в транспортном средстве, содержащий этапы, на которых:
приводят в действие множество преобразователей, расположенных в соответствующих заданных местах в транспортном средстве, для генерации множества соответствующих тональных сигналов, где вычислительное устройство передает команду первому преобразователю на генерацию первого тонального сигнала, если вычислительное устройство определяет, что другой преобразователь должен передать тональный сигнал, то вычислительное устройство передает команду следующему преобразователю на генерацию тонального сигнала;
определяют множество соответствующих разниц во времени между временем генерации каждого тонального сигнала соответствующим преобразователем и временем обнаружения тонального сигнала портативным устройством;
определяют местоположение портативного устройства по меньшей мере частично на основе разниц во времени, определяя расстояние между преобразователями и портативным устройством; и
применяют набор пользовательских настроек, ассоциированный с водителем транспортного средства, при определении, что местоположение портативного устройства находится с водительской стороны кабины транспортного средства.
11. Способ по п. 10, в котором тональный сигнал представляет собой ультразвуковой тональный сигнал.
12. Способ по п. 10, дополнительно содержащий этап, на котором последовательно передают тональные сигналы от преобразователей.
13. Способ по п. 12, дополнительно содержащий этапы, на которых принимают первое уведомление с помощью портативного устройства, генерируют первый ультразвуковой тональный сигнал от первого преобразователя и передают уведомление о приеме от портативного устройства при приеме портативным устройством первого ультразвукового тонального сигнала, причем разница во времени представляет собой разницу во времени между первым уведомлением и уведомлением о приеме.
14. Способ по п. 10, дополнительно содержащий этап, на котором по существу одновременно передают тональные сигналы от преобразователей.
15. Способ по п. 14, дополнительно содержащий этапы, на которых записывают время приема для каждого тонального сигнала при приеме портативным устройством, передают уведомление о приеме, указывающее время приема, и определяют разницу во времени на основе времени приема.
16. Способ по п. 10, дополнительно содержащий этапы, на которых генерируют первый ультразвуковой тональный сигнал от первого преобразователя, генерируют второй ультразвуковой тональный сигнал от портативного устройства после приема первого ультразвукового тонального сигнала и определяют разницу во времени между генерацией первого ультразвукового тонального сигнала и приемом второго ультразвукового тонального сигнала приемным устройством.
17. Способ по п. 10, дополнительно содержащий этап, на котором применяют набор пользовательских настроек при приеме приемным устройством тональных сигналов от более чем одного портативного устройства.
18. Способ по п. 10, дополнительно содержащий этап, на котором определяют местоположение портативного устройства, по меньшей мере частично, на основе расстояния между преобразователями и приемным устройством.
19. Система определения местоположения портативного устройства в транспортном средстве, содержащая компьютер, включающий в себя процессор и память, причем память хранит команды, выполняемые компьютером для:
приведения в действие преобразователя в портативном устройстве для генерации тонального сигнала, где вычислительное устройство выполнено с возможностью передачи команды первому преобразователю на генерацию первого тонального сигнала, если вычислительное устройство определяет, что другой преобразователь должен передать тональный сигнал, то вычислительное устройство передает команду следующему преобразователю на генерацию тонального сигнала;
определения множества разниц во времени между соответствующим временем обнаружения тонального сигнала множеством приемных устройств, расположенных в заданных местах в транспортном средстве, и временем обнаружения уведомления, причем уведомление, передаваемое портативным устройством, указывает генерацию тонального сигнала;
определения местоположения портативного устройства по меньшей мере частично на основе разниц во времени, определяя расстояние между преобразователями и портативным устройством; и
применения набора пользовательских настроек, ассоциированного с водителем транспортного средства, при определении, что местоположение портативного устройства находится с водительской стороны кабины транспортного средства.
20. Система по п. 19, в которой тональный сигнал представляет собой ультразвуковой тональный сигнал.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 6201499, 13.03.2001 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО УСТРОЙСТВА | 2008 |
|
RU2455661C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

