Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки различного назначения. Особенностью данного летательного аппарата является возможность его вертикального взлета и посадки. Технический результат - мы получим транспортное средство способное добраться в любую труднодоступную точку планеты. Поставленная задача достигается за счет того, что в данном летательном аппарате используется система взлета, посадки и система управления движением, аналогов которой нет в мире.
Из научно технической литературы известен летательный аппарат вертикального взлета и посадки заявка на изобретение 2017133738, от 27.09.2017. федеральной службы по интеллектуальной собственности (Роспатент).
Указанный в данной заявке летательный аппарат вертикального взлета и посадки, содержит корпус в виде полого цилиндра, расположенного вертикально и две горизонтальные платформы круглой формы, силовую установку и кабину с системой управления летательным аппаратом на верхней платформе, закрытую обшивкой верхней части фюзеляжа, два соосных вертикально-осевых ротора с лопастями, прикрепленными к роторам через вертикальный, горизонтальный и осевой шарниры, верхний и нижний обтекатели по форме близкие к усеченной полусфере, неподвижно закрепленные по периметру роторов, нижнюю часть фюзеляжа под нижней платформой и телескопические опоры, с установленным автоматом перекоса.
Лопасти, прикрепленные по периметру к соосным вертикально-осевым роторам, обеспечивают создание аэродинамической силы, а установленный автомат перекоса позволяет изменять направление вектора аэродинамической силы. Применение автомата перекоса между двух соосных вертикально-осевых роторов с лопастями позволит исключить несущий вертолетный винт и оставить свободным пространство над верхней частью фюзеляжа.
Недостатками указанного аппарата являются сложность в ходе его эксплуатации, габариты, вес, отсутствие системы безопасности, невозможность взлета и посадки на небольших площадках, во дворе дома, невозможность подлета аппарата в потную к зданию, в том числе и к верхним этажам любых зданий, не правильное расположение винтов, что сильно снижает их эффективность.
Я предлагаю принципиально новый подход к устройству летающего аппарата, который будет взлетать и садиться вертикально, перемещаться вправо, влево, двигаться вперед, назад за счет подъемных толкающих винтов. Все винты будут расположены в импеллерах, что увеличит их КПД.
Для достижения поставленной цели на летательном аппарате установлены:
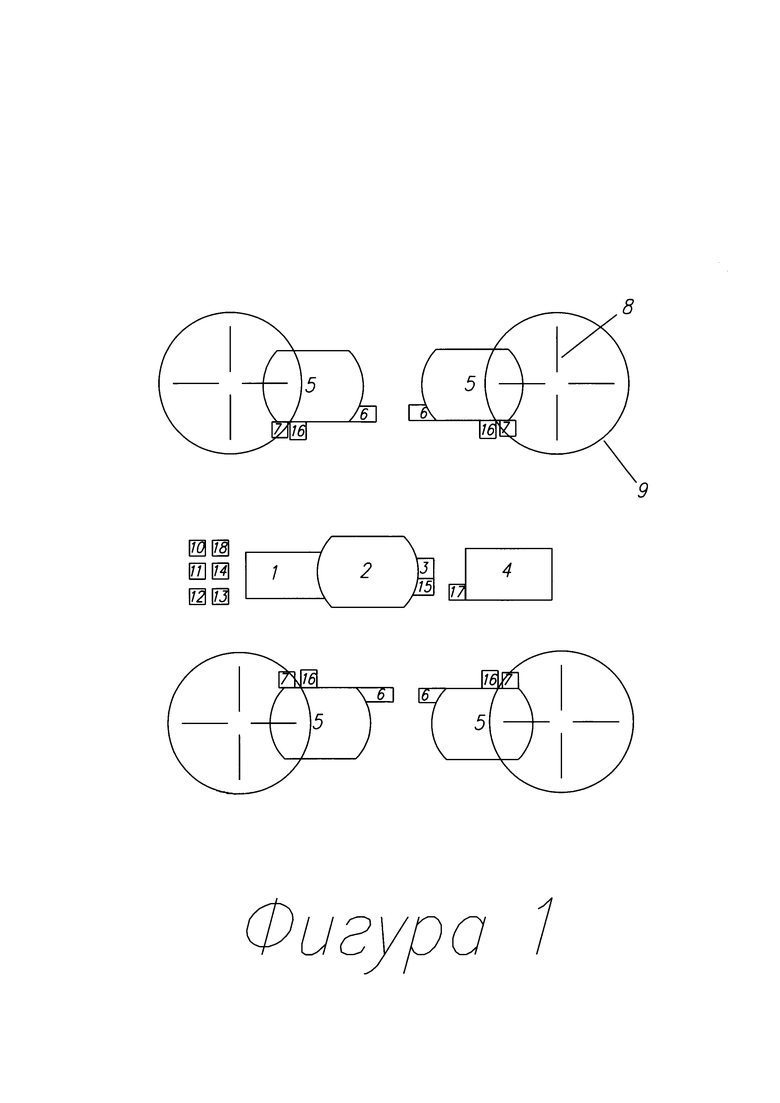
- четыре гидромеханические коробки передач (фиг. 1 поз. 5),
- гидромоторы (фиг. 1 поз. 6),
- подъемные толкающие винты (фиг. 1 поз. 8),
- коробка отбора мощности (фиг. 1 поз. 2),
- бак для рабочей жидкости(фиг.1 поз. 4),
- гидронасосы (фиг. 1 поз. 3),
- масло откачивающие насосы (фиг. 1 поз. 7),
- блок управления гидравликой движения вперед-назад (фиг. 1 поз. 11), - блок управления гидравликой поворота (фиг, 1 поз. 12),
- блок управления электромеханическим гидрораспределителем переключения передач ГМКП (фиг. 1 поз. 10),
- блок управления боковым движением (фиг. 1 поз. 13),
- блок перепускных клапанов управляющих работой гидромоторов (фиг. 1 поз. 14), - перепускные клапана системы аварийного отключения подачи рабочей жидкости в систему гидравлики (фиг. 1 поз. 15),
- электромеханические гидрораспределители управляющие переключением передач гидромеханических коробок передач (фиг. 1 поз. 16), - датчики контроля в системе гидравлики (фиг. 1 поз. 17),
- блок аварийного отключения подачи рабочей жидкости в систему гидравлики(фиг. 1 поз. 18).
Сущность изобретения заключается в следующем.
Крутящий момент от двигателя (фиг. 1 поз. 1) передается на коробку отбора мощности (фиг. 1 поз. 2), которая соединена с двигателем. Коробка отбора мощности (фиг. 1 поз. 2) передает крутящий момент на гидронасосы (фиг. 1 поз. 3), расположенные на корпусе коробки отбора мощности (фиг. 1 поз. 2). Гидронасосы (фиг. 1 поз. 3) откачивают рабочую жидкость из бака для рабочей жидкости системы гидравлики (фиг. 1 поз. 4) и подают ее на блок перепускных клапанов управляющих работой гидромоторов (фиг. 1 поз. 14). Когда блок перепускных клапанов управляющих работой гидромоторов (фиг. 1 поз. 14)находится в выключенном состоянии, рабочая жидкость через перепускной клапан, возвращается в бак для рабочей жидкости гидросистемы (фиг. 1 поз. 4). При включенном блоке перепускных клапанов, управляющих работой гидромоторов (фиг. 1 поз. 14), рабочая жидкость под давлением, по каналам высокого давления, подается на гидромоторы (фиг. 1 поз. 6) расположенные на первичном валу гидромеханической коробки передач (фиг. 1 поз. 5). Гидромоторы (фиг. 1 поз. 6) передают крутящий момент на первичный вал гидромеханической коробки передач (фиг. 1 поз. 5).
Рабочая жидкость из гидромоторов (фиг. 1 поз. 6) возвращается в бак для рабочей жидкости системы гидравлики (фиг. 1 поз. 4).
С гидронасоса (фиг. 1 поз. 3)рабочая жидкость по каналам высокого давления подается на электро механический гидрораспределитель (фиг. 1 поз. 16).
При нейтральном положении переключателя на блоке управления электро механическим гидрораспределителем переключения передач (фиг. 1 поз. 10) рабочая жидкость через обратный клапан электро механического гидрораспределителя (фиг. 1 поз. 16) будет возвращаться обратно в бак для рабочей жидкости системы гидравлики. После включения выбранной передачи на блоке управления электромеханическим гидрораспределителем переключения передач (фиг. 1 поз. 10) рабочая жидкость через электромеханический гидрораспределитель (фиг. 1 поз. 16) будет подаваться в корпус выбранной передачи гидромеханической коробки передач (фиг. 1 поз. 5). Рабочая жидкость из гидромеханической коробки передач (фиг. 1 поз. 5) откачивается маслооткачивающим насосом (фиг 1 поз. 7).
Так как гидромотор (фиг. 1 поз. 6) вращает первичный вал гидромеханической коробки передач (фиг. 1 поз. 5), то крутящий момент, после включения выбранной передачи на блоке управления электромеханическим гидрораспределителем переключения передач, передастся на подъемный толкающий винт (фиг. 1 поз. 8), расположенный на выходном валу гидромеханической коробки передач (по тексту ГМКП). Подъемный толкающий винт (фиг. 1 поз. 8) для большей эффективности расположен в импеллере (фиг. 1 поз. 9). Направленный поток воздуха от подъемных толкающих винтов (фиг. 1 поз. 8) заставит летательный аппарат подниматься в воздух.
Поворот летательного аппарата осуществляется за счет изменения скорости вращения подъемных толкающих винтов. Поворачивая центральный вал блока управления гидравликой поворота (фиг. 1 поз. 12) влево, мы подаем рабочую жидкость на гидромоторы (фиг. 1 поз. 6), расположенные на гидромеханических коробках передач впереди по правому борту, а сзади по левому борту летательного аппарата. В результате увеличивается скорость вращения винтов, расположенных на этих ГМКП, вследствие чего летательный аппарат поворачивает влево. Поворачивая центральный вал блока управления гидравликой поворота (фиг. 1 поз. 12) вправо, мы подаем рабочую жидкость на гидромоторы (фиг. 1 поз. 6), расположенные на гидромеханических коробках передач впереди по левому борту, а сзади по правому борту летательного аппарата. В результате увеличивается скорость вращения винтов, расположенных на этих ГМКП, вследствие чего летательный аппарат поворачивает вправо.
Боковое движение происходит следующим образом. Перемещая рычаг привода блока управления боковым движением (фиг. 1 поз. 13) вправо, мы увеличиваем обороты гидромоторов, которые находятся на ГМКП, расположенных по левому борту, в результате летательный аппарат перемещается вправо. И на оборот, перемещая рычаг привода блока управления боковым движением (фиг. 1 поз. 13) влево, мы увеличиваем обороты гидромоторов, которые находятся на ГМКП, расположенных по правому бору летательного аппарата, в результате летательный аппарат перемещается влево. Движение летательного аппарата вперед происходит следующим образом. Переводя блок управления гидравликой движения вперед- назад в положение вперед, мы подаем дополнительное давление рабочей жидкости на гидромоторы расположенные на ГМКП, которые расположены по обе стороны в корме летательного аппарата, в результате задние винты начинают быстрее вращаться и летательный аппарат останавливается в воздухе, если он летел назад, либо летит вперед, если он находился на одном месте. Переводя блок управления гидравликой движения вперед-назад в положение назад, мы подаем дополнительное давление рабочей жидкости на гидромоторы, которые расположены на ГМКП, которые расположены по обе стороны в передней части летательного аппарата. В результате передние винты начинают быстрее вращаться и летательный аппарат останавливается в воздухе если он летел в перед, либо летит назад если он находился на одном месте..
Вся рабочая жидкость системы управления проходит через радиатор охлаждения рабочей жидкости гидросистемы. На летательном аппарате установлен радиатор системы охлаждения двигателя. В летательном аппарате установлена система контроля утечки рабочей жидкости из системы гидравлики. Система контроля состоит из: блока аварийного отключения подачи рабочей жидкости в систему гидравлики (фиг. 1 поз. 18), датчиков контроля давления в системе гидравлики (фиг. 1 поз. 17), перепускных клапанов системы аварийного отключения подачи рабочей жидкости в систему гидравлики (фиг. 1 поз. 15). Эта система работает следующим образом. Рабочая жидкость подается в систему гидравлики под определенным давлением, в случае утечки рабочей жидкости из системы гидравлики давление в системе падает. Датчики контроля давления в системе гидравлики (фиг. 1 поз. 17) подают сигнал на блок аварийного отключения подачи рабочей жидкости в систему гидравлики (фиг. 1 поз. 18), этот блок автоматически включает перепускной клапан системы аварийного отключения подачи рабочей жидкости (фиг. 1 поз. 15), который подает рабочую жидкость на аварийный участок гидросистемы. В результате рабочая жидкость с гидронасоса возвращается в бак для рабочей жидкости гидросистемы (фиг. 1 поз. 4). На летательном аппарате будет установлен автопилот, блок дистанционного управления, система стабилизации полета относительно горизонта и вертикали. В зависимости от модификации летательного аппарата автопилот, блок дистанционного управления и систему стабилизации полета относительно горизонта и вертикали можно использовать отдельно или комбинировать в любом варианте.
Для приземления в летательном аппарате, в зависимости от модификации, будут использоваться телескопические опоры либо выдвижные шасси.
Данное изобретение относится к конструкциям летательных аппаратов вертикального взлета и посадки различного назначения и позволяет создать принципиально новый вид транспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2699452C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2726763C1 |
| БЛОК РЕГУЛИРУЕМЫХ ПЕРЕПУСКНЫХ КЛАПАНОВ | 2021 |
|
RU2753012C1 |
| КОРОБКА ОТБОРА МОЩНОСТИ | 2018 |
|
RU2708117C1 |
| ГИДРОМЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 2018 |
|
RU2696901C1 |
| АВТОЛЕТ | 2007 |
|
RU2344946C2 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| СПОСОБ РАБОТЫ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2024 |
|
RU2833362C1 |
| ГИДРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2742664C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2008 |
|
RU2385434C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Летательный аппарат состоит из двигателя, толкающих подъемных винтов, системы привода винтов, системы управления, корпуса, источника крутящего момента и агрегатов, передающих крутящий момент на толкающие подъемные винты, которые обеспечивают возможность вертикального взлета и посадки, а также перемещения в выбранном направлении. Для привода и управления скоростью вращения толкающих несущих винтов используется гидромеханическая система, которая содержит четыре гидромеханические коробки передач (ГМКП), гидромоторы, коробку отбора мощности, бак для рабочей жидкости, гидронасосы, блок управления электромеханическим гидрораспределителем переключения передач ГМКП, гидромеханические блоки управления движением. Обеспечивается снижение веса, габаритов летательного аппарата, возможность посадки и взлета на небольшие площадки. 1 ил.
Летательный аппарат, состоящий из двигателя, толкающих подъемных винтов, системы привода винтов, системы управления, корпуса, источника крутящего момента и агрегатов, передающих крутящий момент, крутящий момент от источника крутящего момента передается на толкающие подъемные винты, которые обеспечивают возможность вертикального взлета и посадки, а также перемещения в выбранном направлении, отличающийся тем, что в летательном аппарате используется для привода и управления скоростью вращения толкающих несущих винтов гидромеханическая система, которая содержит четыре гидромеханические коробки передач (ГМКП), гидромоторы, коробку отбора мощности, бак для рабочей жидкости, гидронасосы, блок управления электромеханическим гидрораспределителем переключения передач ГМКП, гидромеханические блоки управления движением.
| ИНСТРУМЕНТ ДЛЯ УЛЬТРАЗВУКОВОГО ВЫРЕЗАНИЯ НЕСКОЛЬКИХ ЗАГОТОВОК ИЗ ТВЕРДЫХ И ХРУПКИХМАТЕРИАЛОВ | 0 |
|
SU180474A1 |
| МОДЕЛЬ ГОРТАНИ ЧЕЛОВЕКА | 0 |
|
SU167073A1 |
| Демпфер сухого трения для изменения собственной частоты колебаний бандажированных рабочих лопаток турбин | 1959 |
|
SU128868A1 |
| WO 2016068784 A1, 06.05.2016 | |||
| US 4925131 A1, 15.05.1990. | |||

