Изобретение относится к области радиолокации, а именно к гомодинным радиолокаторам.
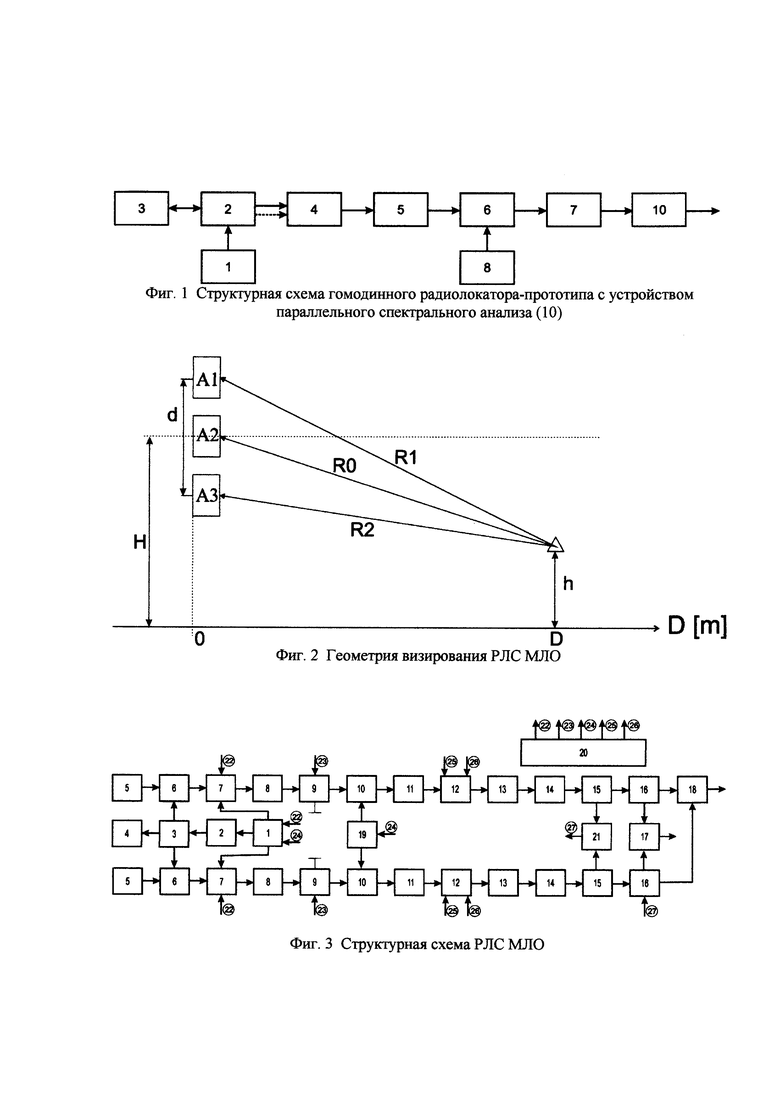
Известен гомодинный радиолокатор (патент №2626405) с непрерывным частотно-модулированным зондирующим сигналом, в котором используется одна приемно-передающая антенна и обеспечивается расширенный динамический диапазон принимаемых сигналов, при минимизации боковых лепестков сигнальной функции. В этом гомодинном радиолокаторе, дополненным известным устройством параллельного спектрального анализа [И.С. Гоноровский. Радиотехнические цепи и сигналы. - М.: Радио и связь, 1994 г.], позиция 10 на фиг. 1, реализуется измерение дальностей Rn, до объектов, находящихся в антенном луче.
Однолучевые гомодинные радиолокаторы находят применение в бортовых радиолокационных станциях (РЛС) бокового обзора пространства с синтезированием апертуры для формирования детального радиолокационного изображения местности на малых и сверхмалых дальностях. Однако в таких РЛС отсутствует возможность определения высоты (возвышения) лоцируемого объекта над поверхностью. Другой особенностью указанного прототипа является ограниченная мощность передающего устройства, увеличение которой ограничивается уровнем развязки приемного и передающего каналов, реализованной в прототипе за счет циркулятора позиция 2 на фиг. 1.
Для устранения этих недостатков и расширения функциональных возможностей РЛС предлагается использовать антенную развязку приемных и передающего каналов и кроме отдельного передающего канала со своей антенной ввести два приемных гомодинных канала с двумя приемными антеннами, смещенными по вертикали на базу d. Для повышения точности измерения разности фаз предусмотрена возможность аппаратной калибровки идентичности приемных каналов (по амплитуде и фазе), для чего в схему включены ключи коммутации тестового сигнала (7). В заявляемом радиолокаторе измеряются дальности до лоцируемых объектов Rn и формируются оценки разности фаз  сигналов, принятых (приемными) антеннами (фиг. 2), которые позволяют рассчитать высоты лоцируемых объектов по следующим аналитическим соотношениям.
сигналов, принятых (приемными) антеннами (фиг. 2), которые позволяют рассчитать высоты лоцируемых объектов по следующим аналитическим соотношениям.
 где
где
ΔR разность хода электромагнитной волны (ЭМВ) до приемных антенн, причем первый член выражения определяет разность хода для ровной горизонтальной поверхности;
R1, R2 - расстояние от объекта до приемных антенн А1 и A3 соответственно (см. фиг. 3);
H - высота фазового центра антенной системы;
d - база антенной системы;
h - высота объекта;
 где
где
Δϕ - разность фаз, измеряемая предлагаемым радаром;
 - волновой коэффициент;
- волновой коэффициент;
λ - длинна волны несущего излучения РЛС МЛО;
 , определяющему высоту объекта лоцирования либо поверхности.
, определяющему высоту объекта лоцирования либо поверхности.
R0 - средняя дальность до объекта.
Использование изобретения позволит создать радиолокационную станцию мониторинга ледовой обстановки с увеличенной дальностью действия (для обеспечения широкой полосы обзора) и возможностью измерения второй координаты (высоты) лоцируемого объекта для выделения и определения координат айсбергов и оценки степени опасности.
Радиолокационная станция для мониторинга ледовой обстановки (РЛС МЛО), содержит передающий канал, два параллельных приемных канала, генератор функции весового окна, устройство оценки разности комплексного коэффициента передачи приемных трактов, полусумматор, устройство синхронизации и многоканальное устройство измерения разности фаз, при этом, приемные каналы содержат последовательно соединенные
- приемную антенну,
- балансный смеситель,
- ключ коммутации калибровочного сигнала,
- малошумящий усилитель,
- ключ бланкирования зоны обращения и обратного хода пилы ЛЧМ,
- управляемый усилитель,
- фильтр нижних частот,
- АЦП,
- цифровой фильтр,
- устройство децимации,
- устройство параллельного спектрального анализа (формирования спектра),
- устройство коррекции спектра.
Передающий канал содержит последовательно соединенные
- формирователь зондирующего и калибровочного сигнала (выходом зондирующего сигнала),
- усилитель зондирующего сигнала,
- направленный ответвитель,
- передающую антенну.
- Вход направленного ответвителя СВЧ сигналов соединен с выходом усилителя зондирующего сигнала, выход основного сигнала соединен с передающей антенной, а выходы ответленного (-20 дБ) сигнала соединены со входами балансных смесителей;
- входы полусумматора соединены с выходами устройств коррекции спектра, выход полусумматора является первым выходом РЛС МЛО, выдающим оценки средней дальностей Rn;
- первый выход устройства синхронизации соединен со входами формирователя зондирующего и калибровочного сигнала, и входами ключей коммутации калибровочного сигнала; второй выход устройства синхронизации соединен со входами ключей бланкирования зоны обращения и обратного хода пилы ЛЧМ; третий выход устройства синхронизации соединен со входами формирователя зондирующего и калибровочного сигнала и генератора функции весового окна; четвертый и пятый выходы устройства синхронизации соединены с входами АЦП;
- выходы калибровочного сигнала формирователя зондирующего и калибровочного сигнала соединены с входами ключей коммутации калибровочного сигнала;
- выходы генератора функции весового окна соединены со входами управляемых усилителей;
- входы устройства оценки разности комплексного коэффициента передачи приемных трактов соединены с выходами устройства параллельного спектрального анализа, а выход соединен с со входом устройства коррекции спектра второго приемного канала;
- входы многоканального устройства измерения разности фаз соединены с выходами устройств коррекции спектра, а выход является вторым выходом РЛС МЛО, обеспечивающим формирование оценки разности фаз  и нахождение высот hn лоцируемых объектов (для n-го номера спектрального канала) по формуле:
и нахождение высот hn лоцируемых объектов (для n-го номера спектрального канала) по формуле:
 где
где
h - высота объекта;
Н - высота фазового центра антенной системы;
Δϕ - разность фаз, измеряемая предлагаемым радаром;
Rn - средняя дальность до объекта, полученная с выхода полусумматора (18), выдающего оценку средней дальности 
 - волновой коэффициент;
- волновой коэффициент;
λ - длинна волны несущего излучения РЛС МЛО;
d - база антенной системы.
Суть изобретения поясняется Фигурами 1-6.
На Фиг. 3 изображена структурная схема интерферометрического гомодинного радиолокатора, где приняты следующие обозначения:
1. Формирователь зондирующего и калибровочного сигнала
2. Усилитель зондирующего сигнала
3. Направленный ответвитель
4. Передающая антенна
5. Приемные антенны
6. Балансные смесители
7. Ключи коммутации калибровочного сигнала
8. Малошумящие усилители
9. Ключи бланкирования зоны обращения и обратного хода пилы ЛЧМ
10. Управляемые усилители
11. Фильтры нижних частот
12. АЦП
13. Цифровые фильтры
14. Устройства децимации
15. Устройства параллельного спектрального анализа (формирования спектра)
16. Устройства коррекции спектра
17. Многоканальное устройство измерения разности фаз
18. Полусумматор (выдающий оценку средней дальности 
19. Генератор функции весового окна
20. Устройство синхронизации
21. Устройство оценки разности комплексного коэффициента передачи приемных трактов
На Фигуре 4 представлен закон изменения частоты зондирующего (утолщенная линия) и принятого сигнала (а), бланк обратного хода пилы и зоны обращения (б), сигналы биений на входе управляемых усилителей (в).
На Фигуре 4 обозначено:
ƒ0 - несущая частота зондирующего сигнала (ЗС), ƒ- частота, t - время,
ƒб - частота биений, прямо пропорциональная дальности до объекта R,
ƒmin и ƒmax - минимальная и максимальная частота зондирующего сигнала с линейной частотной модуляцией (ЛЧМ),
Δƒд - девиация частоты ЗС,
tR - временная задержка отраженного сигнала, пропорциональная дальности до объекта R,
Тм - период модуляции ЗС.
На Фигуре 5 представлены нормированные спектры сигнала биений для нулевых дальностей, S1(f) - спектр сигнала биений без коррекции, S2(f) - спектр сигнала биений с учетом частотной коррекции в усилителе с квадратичной амплитудно-частотной характеристикой.
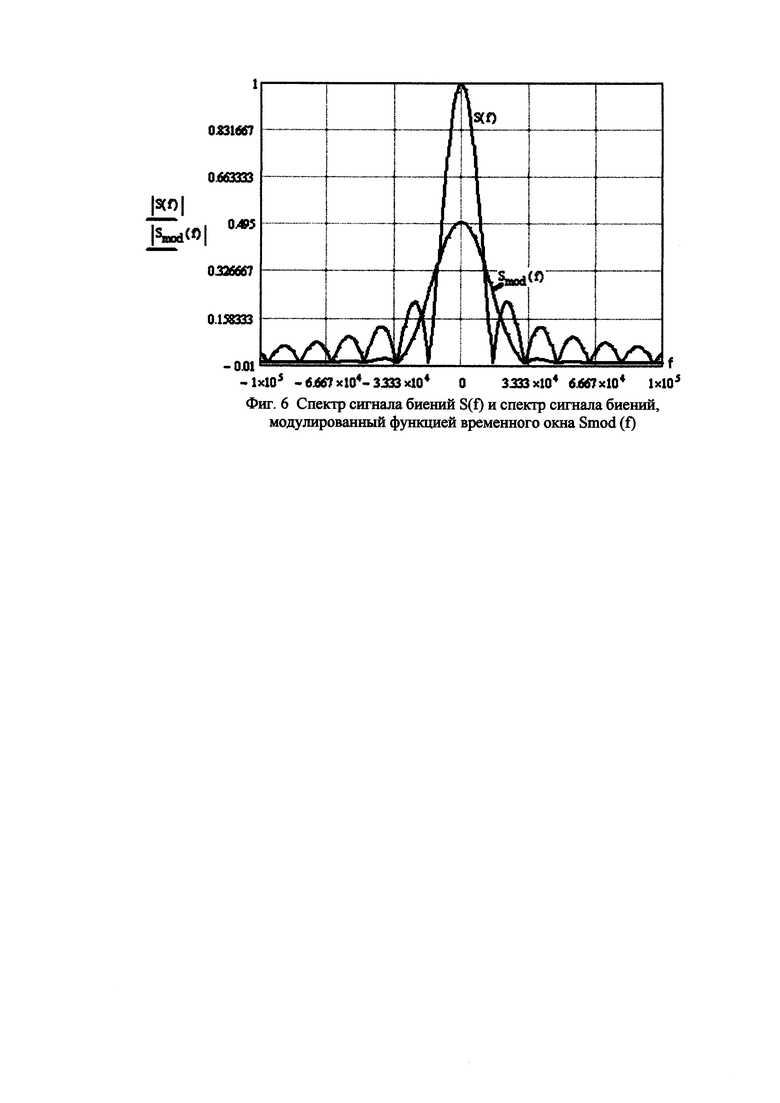
На Фигуре 6 представлен спектр сигнала биений S(f) и спектр сигнала биений, модулированный функцией временного окна Smod(f).
Радиолокационная станция для мониторинга ледовой обстановки работает следующим образом.
РЛС МЛО имеет два режима функционирования: рабочий режим и калибровочный. Калибровочный режим используется непосредственно перед рабочим для выравнивания коэффициентов передачи приемных трактов РЛС МЛО, что позволяет минимизировать ошибки оценок разности фаз в широком диапазоне температур, характерных для эксплуатации РЛС МЛО. В калибровочном режиме ключи 7 подают на входы малошумящих усилителей 8 идентичный калибровочный сигнал. После прохождения которого по параллельным каналам приемных трактов формируются и запоминаются (в устройстве 21) до следующей калибровки оценки разности комплексного коэффициента передачи для каждой компоненты спектра, сформированного в устройствах 15. Полученные комплексные коэффициенты корректируют спектр в устройстве 16 в одном из приемных каналов для достижения идентичности комплексных коэффициентов передачи обоих приемных каналов.
В рабочем режиме формирователь 1 выдает на передающий канал (устройства 2, 3 и 4) зондирующий СВЧ-сигнал, а ключи 7 коммутируют на входы малошумящих усилителей 8 сигналы биений с балансных смесителей 6, из которых на выходе РЛС МЛО формируются оценки дальности до объектов и разностей фаз пропорциональных высоте объектов. Выходной сигнал формирователя ЗС 1 (Фиг. 3), частота которого изменяется по линейному закону (ЛЧМ) (фиг 4), поступает через усилитель 2 и основной канал направленного ответвителя (3) на передающую антенну (4) и излучается в пространство. Одновременно с этим ослабленные в направленном ответвителе ЗС поступают на входы балансных смесителей 6, являясь гетеродинным сигналом.
Отраженный от объекта сигнал принимается приемными антеннами (5) Сигналы с выходов приемных антенн (5) поступают на входы балансных смесителей (6) Балансные смесители (6) реализуют перемножение принятых и гетеродинных сигналов и низкочастотную фильтрацию. Далее сигналы обоих каналов через ключи 7 проходят на вход малошумящих усилителей 8 (усилители с малой величиной коэффициента шума), где происходит их основное усиление. С выходов усилителей 8 сигнал биений поступает на ключи бланкирования зоны обращения и обратного хода пилы, пропускающие только информативные участки принятого сигнала в требуемом временном интервале, соответствующем зоне обзора РЛС МЛО по дальности. На фиг. 4а показан закон изменения частоты ЗС (утолщенная пилообразная линия) и принятого сигнала, бланк обратного хода пилы и зоны обращения (б), сигналы биений на входе управляемых усилителей (в).
Для реализации частотного эспандирования и уменьшения динамического диапазона сигнала биений в гомодинном радиолокаторе используется зависимость интенсивности принятых сигналов от дальности (пропорциональной частоте биений), путем применения квадратичной амплитудно-частотной характеристики (АЧХ) в устройстве коррекции спектра (16), что позволяет выравнивать мощность сигналов, принятых от объектов, расположенных на различных дальностях и имеющих одинаковую величину Sэф. При этом динамический диапазон всех сигналов сужается до динамического диапазона наблюдаемой сцены (Фиг. 5).
Однако кроме отмеченного положительного эффекта сужения динамического диапазона, возникает проблема возрастания уровня боковых лепестков функции неопределенности ЛЧМ зондирующего сигнала. Это возрастание создает существенные помехи на радиолокационном изображении сцены - пространственную засветку экрана по дальности, следующую за сигналом, который соответствует отражению от объекта.
Для устранения этого эффекта, а также устранения влияния паразитной амплитудной модуляции генератора зондирующего сигнала, в гомодинном радиолокаторе применяются управляемые усилители 10, осуществляющие амплитудную модуляцию сигналов биений весовым окном (во временной области), поступающим с генератора функции весового окна 19. В результате сигнал биений (Фиг. 6) модулируется по амплитуде функцией «временного окна» в виде функции: 
Несложно показать, что в этом случае огибающая спектра сигнала биений на выходе амплитудного модулятора 6 будет иметь вид функции:

где: ωб - частота биений;
S(ω) - спектральная плотность сигнала биений;
Тм - период модуляции ЛЧМ;
ω - переменная частота.
В отличии от функции  огибающая спектра сигнала биений, модулированная функцией «временного окна» Smod(ω), на выходе устройства коррекции спектра с квадратичной амплитудно-частотной характеристикой (АЧХ) 16 (Фиг. 6) имеет более широкий основной лепесток и боковые лепестки, которые спадают, обратно пропорционально третьей степени частоты.
огибающая спектра сигнала биений, модулированная функцией «временного окна» Smod(ω), на выходе устройства коррекции спектра с квадратичной амплитудно-частотной характеристикой (АЧХ) 16 (Фиг. 6) имеет более широкий основной лепесток и боковые лепестки, которые спадают, обратно пропорционально третьей степени частоты.
Таким образом, умножение сигнала в управляемых усилителях 10 на функцию окна, приводит к компенсации сомножителя  и, следовательно, спектр огибающей сигнала биений будет иметь вид функции:
и, следовательно, спектр огибающей сигнала биений будет иметь вид функции: 
В результате в гомодинном радиолокаторе не будет наблюдаться нежелательного роста уровня боковых лепестков функции неопределенности ЛЧМ сигнала.
Формирователь зондирующего сигнала 1 и генератор функции временного окна 19 синхронизируются по времени устройством синхронизации 20 (выход 3). Устройство синхронизации 20 кроме того формирует управляющие сигналы для синхронизации ключей бланкирования зоны обращения и обратного хода пилы ЛЧМ 9 (выход 2), как это показано на фиг. 4, стробы оцифровки и сигнал частоты дискретизации для АЦП 12 (выходы 4 и 5 соответственно). Для перевода РЛС МЛО в режим калибровки перед каждым запуском рабочего режима устройство синхронизации 20 выдает управляющий сигнал на формирователь калибровочного сигнала 1 и ключи коммутации калибровочного сигнала 7 (с выхода 1).
Сигналы с выходов управляемых усилителей 10 поступают на фильтры нижних частот 11, выполняющие функцию антиаллиасного фильтра перед АЦП 12. С выходов АЦП 12 оцифрованные сигналы биений попадают на цифровые фильтры 13, которые подавляют частотные составляющие, пришедшие от дальностей за пределами зоны обзора РЛС МЛО и децимируются в устройствах децимации 14 для сокращения потока обрабатываемых в РЛС МЛО данных.
В устройствах параллельного спектрального анализа (15) осуществляются преобразования сигналов биений в их спектры, которые через устройства коррекции спектра 16 подаются на многоканальное устройство измерения разности фаз (17), обеспечивающее формирование оценки разности фаз  для нахождения высот hn лоцируемых объектов по формуле (оценка разности фаз может быть сформирована различными способами, например после оцифровки сигналов как arcsin отношения произведения квадратур спектров сигналов с выхода 16 к их мощности):
для нахождения высот hn лоцируемых объектов по формуле (оценка разности фаз может быть сформирована различными способами, например после оцифровки сигналов как arcsin отношения произведения квадратур спектров сигналов с выхода 16 к их мощности):
 , определяющему высоту объекта лоцирования либо поверхности.
, определяющему высоту объекта лоцирования либо поверхности.
Спектры сигналов биений с устройства (16) подаются так же на полусумматор (18). Выход полусумматора является выходом системы, выдающим оценки дальностей Rn.
Таким образом, технический результат от использования предложенного технического решения заключается в возможности создать радиолокационную станцию мониторинга ледовой обстановки, для которой необходима увеличенная дальность действия (для обеспечения широкой полосы обзора) и возможность измерения второй координаты (высоты) лоцируемого объекта для выделения и определения координат айсбергов и оценки степени опасности, работающую в широком диапазоне изменения температур.
Изобретательский уровень предложенного технического решения подтверждается отличительной частью формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интерферометрический гомодинный радиолокатор | 2018 |
|
RU2689397C1 |
| Гомодинный радиолокатор со сканированием диаграммы направленности антенны | 2018 |
|
RU2702190C1 |
| Гомодинный радиолокатор с многоканальным приемо-передающим трактом | 2018 |
|
RU2700654C1 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР СО СКАНИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2022 |
|
RU2815335C1 |
| ГОМОДИННЫЙ РАДИОЛОКАТОР | 2015 |
|
RU2626405C2 |
| ПРИЁМОПЕРЕДАТЧИК РАДАРА НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2018 |
|
RU2687286C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ШИРОКОПОЛОСНЫМ НЕПРЕРЫВНЫМ ЛИНЕЙНО ЧАСТОТНО-МОДУЛИРОВАННЫМ ИЗЛУЧЕНИЕМ | 2010 |
|
RU2460087C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| Трехкоординатный гомодинный радиолокатор | 2024 |
|
RU2838247C1 |

Изобретение относится к области радиолокации, а именно к гомодинным радиолокаторам. Технический результат - создание радиолокационной станции мониторинга ледовой обстановки, для которой необходима увеличенная дальность действия (для обеспечения широкой полосы обзора) и возможность измерения второй координаты (высоты) лоцируемого объекта для выделения и определения координат айсбергов и оценки степени опасности. Указанный результат достигается за счет того, что гомодинный радиолокатор содержит передающий и приемные каналы (антенны которых разнесены на базу d), устройства формирования спектра (например, с помощью БПФ) и многоканальное устройство измерения разности фаз, а для повышения точности измерения разности фаз в приемных каналах предусмотрена возможность калибровки идентичности приемных каналов (по амплитуде и фазе), для чего в схему включены ключи коммутации тестового сигнала. 6 ил.
Радиолокационная станция для мониторинга ледовой обстановки (РЛС МЛО), содержащая передающий канал, два параллельных приемных канала, генератор функции весового окна, устройство оценки разности комплексного коэффициента передачи приемных трактов, полусумматор, устройство синхронизации и многоканальное устройство измерения разности фаз, при этом приемные каналы содержат последовательно соединенные приемную антенну, балансный смеситель, ключ коммутации калибровочного сигнала, малошумящий усилитель, ключ бланкирования зоны обращения и обратного хода пилы линейно-частотно-модулированного (ЛЧМ) сигнала, управляемый усилитель, фильтр нижних частот, аналого-цифровой преобразователь (АЦП), цифровой фильтр, устройство децимации, устройство параллельного спектрального анализа и формирования спектра, устройство коррекции спектра, передающий канал содержит последовательно соединенные выход зондирующего сигнала формирователя зондирующего и калибровочного сигналов, усилитель зондирующего сигнала, направленный ответвитель сверхвысокочастотных (СВЧ) сигналов, передающую антенну; при этом выход основного сигнала передающего канала соединен с передающей антенной, а выходы ответвленного сигнала с уровнем -20 дБ соединены со входами балансных смесителей, входы полусумматора соединены с выходами устройств коррекции спектра, выход полусумматора является первым выходом РЛС МЛО, выдающим оценки средней дальностей Rn, первый выход устройства синхронизации соединен со входами формирователя зондирующего и калибровочного сигнала и входами ключей коммутации калибровочного сигнала; второй выход устройства синхронизации соединен со входами ключей бланкирования зоны обращения и обратного хода пилы ЛЧМ; третий выход устройства синхронизации соединен со входами формирователя зондирующего и калибровочного сигнала и генератора функции весового окна; четвертый и пятый выходы устройства синхронизации соединены с входами АЦП; выходы калибровочного сигнала формирователя зондирующего и калибровочного сигналов соединены с входами ключей коммутации калибровочного сигнала, выходы генератора функции весового окна соединены со входами управляемых усилителей; входы устройства оценки разности комплексного коэффициента передачи приемных каналов соединены с выходами устройства параллельного спектрального анализа, а выход соединен с со входом устройства коррекции спектра второго приемного канала, входы многоканального устройства измерения разности фаз соединены с выходами устройств коррекции спектра, а выход является вторым выходом РЛС МЛО, обеспечивающим формирование оценки разности фаз и нахождение высот hn лоцируемых объектов для n-го номера спектрального канала по формуле:
и нахождение высот hn лоцируемых объектов для n-го номера спектрального канала по формуле:

где:
h - высота объекта,
Н - высота фазового центра антенной системы,
Δϕ - разность фаз, измеряемая РЛС,
Rn - средняя дальность до объекта, полученная с выхода полусумматора, выдающего оценку средней дальности 
 - волновой коэффициент,
- волновой коэффициент,
λ - длинна волны несущего излучения РЛС МЛО,
d - база разноса антенной системы приемных каналов.
| ГОМОДИННЫЙ РАДИОЛОКАТОР | 2015 |
|
RU2626405C2 |
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО ГОМОДИННОГО РАДИОЛОКАТОРА | 2000 |
|
RU2189055C2 |
| ГОМОДИННЫЙ ПРИЕМНИК И СПОСОБ ПРЕОДОЛЕНИЯ ШУМА СМЕЩЕНИЯ ПОСТОЯННОГО ТОКА В ГОМОДИННОМ ПРИЕМНИКЕ | 2015 |
|
RU2659331C2 |
| WO 2002097468 A2, 05.12.2002 | |||
| US 20130106648 A1, 02.05.2013 | |||
| JP 2017198474 A, 02.11.2017 | |||
| WO 2001027861 A2, 19.04.2001. | |||

