Уровень техники
Традиционные насосы текучей среды и двигатели внутреннего сгорания, содержащие «кривошипную» возвратно-поступательную конструкцию для приведения в движение поршня, конечно, являются широко известными и изученными в уровне техники. Недостаток этих конструкций состоит в необходимости преобразования поступательного движения поршня во вращательное движение вала, с которым соединен поршень, а также в связанных с этим потерях.
Аналогично, традиционные аппараты, предназначенные для перемещения или расширения текучих сред или работающие посредством протекания текучей среды через них, которые содержат возвратно-поступательную конструкцию для приведения в движение поршня, подвержены той же проблеме.
Весьма желательным является создание аппарата для сжатия текучей среды, не имеющего потребности в таком преобразовании с помощью кривошипа поступательного движения во вращательное.
Аналогично, весьма желательным является создание аппарата, обеспечивающего тот же технический эффект, что и традиционный аппарат для перемещения, расширения или протекания текучей среды, но не имеющего потребности в таком традиционном преобразовании с помощью кривошипа поступательного движения во вращательное.
Из уровня техники известен аппарат (см. патентную публикацию US 1,967,167), содержащий корпус в виде сферической камеры, вал, проходящий через указанный корпус, импеллер сферической формы, содержащий в себе камеру для флюида, расположенную вокруг вала, и поддерживаемый таким образом, чтобы обеспечить колебания, изменяющие размер указанной камеры для флюида, а также средства для направления перемещения импеллера из стороны в сторону в указанном корпусе.
Раскрытие сущности изобретения
Согласно настоящему раскрытию, предложены аппарат и способ, сформулированные в прилагаемой формуле изобретения. Другие признаки изобретения будут понятны из зависимых пунктов, а также из нижеследующего описания.
Соответственно, может быть предложен аппарат, содержащий: вал, задающий первую ось вращения и выполненный с возможностью вращения вокруг нее; шпиндель, задающий вторую ось вращения, причем вал проходит через шпиндель, первый поршневой элемент, предусмотренный на валу, причем первый поршневой элемент проходит от шпинделя к дистальному концу вала; причем вал, шпиндель и поршневой элемент зафиксированы относительно друг друга; ротор, установленный с опорой на шпинделе; причем ротор содержит первую камеру, причем первый поршневой элемент проходит через первую камеру; при этом ротор и шпиндель выполнены с возможностью вращения с валом вокруг первой оси вращения; и ротор выполнен с возможностью поворота относительно шпинделя вокруг второй оси вращения для обеспечения возможности относительного поворотного движения между ротором и первым поршневым элементом при вращении ротора вокруг первой оси вращения.
Первая камера может иметь первое отверстие; и первый поршневой элемент проходит от шпинделя через первую камеру к первому отверстию.
Шпиндель может быть размещен по существу по середине между концами вала.
Первый поршневой элемент может проходить от одной стороны шпинделя вдоль вала; и второй поршневой элемент проходит от другой стороны шпинделя вдоль вала, при этом ротор содержит вторую камеру для обеспечения возможности относительного поворотного движения между ротором и вторым поршневым элементом при вращении ротора вокруг первой оси вращения.
Вторая камера может иметь второе отверстие; и второй поршневой элемент может проходить от шпинделя через вторую камеру ко второму отверстию.
Между первой камерой и второй камерой может быть предусмотрен закрываемый проточный канал.
Закрываемый проточный канал может содержать проточный тракт в шпинделе, открытый, когда ротор повернут до одного предела его поворота, и закрытый при повороте ротора в направлении другого предела его поворота.
Вторая ось вращения по существу перпендикулярна первой оси вращения.
Аппарат может дополнительно содержать: корпус со стенкой, задающей полость; причем ротор выполнен с возможностью вращения и поворота внутри полости и расположен относительно корпуса так, чтобы между ротором и большей частью стенки поддерживался малый зазор.
Корпус может дополнительно содержать опорную конструкцию для поддержания вала.
Поршневой элемент (элементы) может иметь такие размеры, что он оканчивается вблизи стенки корпуса, причем между концом поршневого элемента и стенкой корпуса поддерживается малый зазор.
Корпус может дополнительно содержать по меньшей мере по одному порту на камеру для передачи текучей среды между проточным каналом и соответствующей камерой.
Для каждой камеры корпус может дополнительно содержать впускной порт для подачи текучей среды в камеру и выпускной порт для вывода текучей среды из камеры.
Порты могут иметь такие размеры и могут быть расположены на корпусе так, что: в первом множестве относительных положений портов и соответствующих отверстий ротора порты и отверстия ротора не совмещены, так что отверстия полностью закрыты стенкой корпуса для предотвращения потока текучей среды между камерой (камерами) и портом (портами); и во втором множестве относительных положений портов и соответствующих отверстий ротора отверстия по меньшей мере частично совмещены с портами, так что отверстия по меньшей мере частично открыты для пропускания потока текучей среды между камерой (камерами) и портом (портами).
Аппарат может дополнительно содержать поворотный привод, выполненный с возможностью поворота ротора вокруг шпинделя.
Поворотный привод может дополнительно содержать: первый направляющий элемент на роторе; и второй направляющий элемент на корпусе; причем первый направляющий элемент по форме комплементарен второму направляющему элементу; при этом один из первого и второго направляющих элементов определяет тракт, ограниченный другой из первого и второго направляющих элементов; что вызывает поворот ротора вокруг шпинделя.
Направляющий тракт может определять тракт вокруг первой окружности ротора или корпуса, направляющий тракт может содержать по меньшей мере: первый изгиб, который направляет указанный тракт в сторону от первой стороны первой окружности и затем обратно ко второй стороне первой окружности; и второй изгиб, который направляет указанный тракт в сторону от второй стороны первой окружности и затем обратно к первой стороне первой окружности.
Камера (камеры) выполнена сообщающейся по текучей среде с системой подачи топлива.
Камера (камеры) выполнена сообщающейся по текучей среде с устройством воспламенения топлива.
Первая камера может быть специально приспособлена для сжатия, и/или перемещения, и/или протекания, и/или расширения текучей среды.
Вторая камера специально приспособлена для сжатия, и/или перемещения, и/или протекания, и/или расширения текучей среды.
Также может быть предложен аппарат, содержащий: первый поршневой элемент, выполненный с возможностью вращения вокруг первой оси вращения; ротор, содержащий первую камеру и выполненный с возможностью поворота вокруг второй оси вращения, причем первый поршневой элемент проходит через первую камеру; при этом: ротор и первый поршневой элемент выполнены с возможностью вращения вокруг первой оси вращения; и ротор выполнен с возможностью поворота вокруг второй оси вращения для обеспечения возможности относительного поворотного движения ротора и первого поршневого элемента, связанного с вращением ротора вокруг первой оси вращения.
Также может быть предложен способ эксплуатации аппарата, содержащего: вал, задающий первую ось вращения и выполненный с возможностью вращения вокруг нее; шпиндель, задающий вторую ось вращения, причем вал проходит через шпиндель; первый поршневой элемент, предусмотренный на валу; и причем вал, шпиндель и поршневой элемент зафиксированы относительно друг друга; причем первый поршневой элемент (22) выполнен с возможностью вращения вокруг первой оси вращения; ротор, содержащий первую камеру и выполненный с возможностью поворота вокруг второй оси вращения, причем первый поршневой элемент проходит через первую камеру; при этом при работе: ротор и первый поршневой элемент вращают вокруг первой оси вращения; и ротор поворачивают вокруг второй оси вращения так, чтобы обеспечивать относительное поворотное движение между ротором и первым поршневым элементом, за счет чего изменяют объем первой камеры, причем изменение объема камеры связано с вращением ротора вокруг первой оси вращения.
Также может быть предложен аппарат для сжатия текучей среды, содержащий: вал, задающий первую ось вращения и выполненный с возможностью вращения вокруг нее; шпиндель, задающий вторую ось вращения; причем вал проходит под углом через шпиндель; первый поршневой элемент, предусмотренный на валу, причем первый поршневой элемент проходит от шпинделя к дистальному концу вала; ротор, установленный с опорой на шпинделе, причем ротор выполнен с возможностью поворота относительно шпинделя вокруг второй оси вращения; причем ротор содержит первую камеру сжатия, имеющую первое отверстие; причем первый поршневой элемент проходит от шпинделя через первую камеру сжатия к первому отверстию; причем ротор выполнен с возможностью вращения со шпинделем и валом вокруг первой оси вращения; и с возможностью поворота относительно шпинделя вокруг второй оси вращения так, что первый поршневой элемент имеет возможность перемещения от одной стороны первой камеры сжатия до противоположной стороны первой камеры сжатия при вращении ротора вокруг первой оси вращения для обеспечения сжатия текучей среды внутри первой камеры сжатия.
Также может быть предложен аппарат для сжатия текучей среды, содержащий: вал, задающий первую ось вращения и выполненный с возможностью вращения вокруг нее; шпиндель, задающий вторую ось вращения, причем вал проходит под углом через шпиндель, первый поршневой элемент, предусмотренный на валу, причем первый поршневой элемент проходит от шпинделя к дистальному концу вала; ротор, установленный с опорой на шпинделе; причем ротор выполнен с возможностью поворота относительно шпинделя вокруг второй оси вращения; причем ротор содержит первую камеру сжатия, имеющую первое отверстие; причем первый поршневой элемент проходит от шпинделя через первую камеру сжатия к первому отверстию; причем ротор выполнен с возможностью вращения со шпинделем и валом вокруг первой оси вращения; и с возможностью поворота относительно шпинделя вокруг второй оси вращения так, что первый поршневой элемент имеет возможность перемещения от одной стороны первой камеры сжатия до противоположной стороны первой камеры сжатия, когда к периферии ротора приложена направляющая сила, при вращении ротора вокруг первой оси вращения для обеспечения сжатия текучей среды внутри первой камеры сжатия.
Также может быть предложен аппарат для сжатия текучей среды, содержащий: вал, задающий первую ось вращения и выполненный с возможностью вращения вокруг нее; шпиндель, задающий вторую ось вращения; причем вал проходит через шпиндель; первый поршневой элемент, предусмотренный на валу, причем первый поршневой элемент проходит от шпинделя к дистальному концу вала; ротор, установленный с опорой на шпинделе; причем ротор содержит первую камеру сжатия, имеющую первое отверстие; причем первый поршневой элемент проходит от шпинделя через первую камеру сжатия к первому отверстию; при этом: ротор выполнен с возможностью вращения с валом вокруг первой оси вращения; и ротор выполнен с возможностью поворота относительно шпинделя вокруг второй оси вращения так, чтобы относительное поворотное движение между ротором и первым поршневым элементом при вращении ротора вокруг первой оси вращения приводило к сжатию текучей среды внутри первой камеры сжатия.
Шпиндель может быть размещен по существу в центре вала. Шпиндель может быть размещен по существу посередине между концами вала.
Первый поршневой элемент может проходить от одной стороны шпинделя вдоль вала; и второй поршневой элемент может проходить от другой стороны шпинделя вдоль вала, ротор содержит вторую камеру сжатия, имеющую второе отверстие; при этом: второй поршневой элемент проходит от шпинделя через вторую камеру сжатия ко второму отверстию; так, что второй поршневой элемент выполнен с возможностью перемещения от одной стороны второй камеры сжатия до противоположной стороны второй камеры сжатия при вращении ротора вокруг первой оси вращения для обеспечения сжатия текучей среды внутри второй камеры сжатия.
Первый поршневой элемент может проходить от одной стороны шпинделя вдоль вала; и второй поршневой элемент может проходить от другой стороны шпинделя вдоль вала, ротор содержит вторую камеру сжатия, имеющую второе отверстие; при этом: второй поршневой элемент проходит от шпинделя через вторую камеру сжатия ко второму отверстию; так, чтобы относительное поворотное движение между ротором и вторым поршневым элементом при вращении ротора вокруг первой оси вращения приводило к сжатию текучей среды внутри второй камеры сжатия.
Между первой камерой сжатия и второй камерой сжатия может быть предусмотрен закрываемый проточный канал.
Закрываемый проточный канал может содержать проточный тракт в шпинделе, открытый, когда ротор повернут до одного предела его поворота, и закрытый при повороте ротора в направлении другого предела его поворота.
Вал, шпиндель и поршневой элемент (элементы) могут быть зафиксированы относительно друг друга.
Вторая ось вращения по существу перпендикулярна первой оси вращения.
Аппарат для сжатия текучей среды может дополнительно содержать: корпус со стенкой, задающей полость; причем ротор выполнен с возможностью вращения и поворота внутри полости; и расположен относительно корпуса так, чтобы между отверстием (отверстиями) камеры сжатия и большей частью стенки поддерживался малый зазор.
Корпус может дополнительно содержать опорную конструкцию для поддержания вала.
Поршневой элемент (элементы) может иметь такие размеры, что он оканчивается вблизи стенки корпуса, причем между концом поршневого элемента и стенкой корпуса поддерживается малый зазор.
Корпус может дополнительно содержать по меньшей мере по одному порту на камеру сжатия для передачи текучей среды между проточным каналом и соответствующей камерой сжатия.
Для каждой камеры сжатия корпус может дополнительно содержать впускной порт для подачи текучей среды в камеру сжатия; и выпускной порт для вывода текучей среды из камеры сжатия.
Порты могут иметь такие размеры и могут быть расположены на корпусе так, что: в первом диапазоне относительных положений портов и соответствующих отверстий ротора порты и отверстия ротора не совмещены, так что отверстия полностью закрыты стенкой корпуса для предотвращения потока текучей среды между камерой (камерами) сжатия и портом (портами); и во втором диапазоне относительных положений портов и соответствующих отверстий ротора отверстия частично совмещены с портами, так что отверстия по меньшей мере частично открыты для пропускания потока текучей среды между камерой (камерами) сжатия и портом (портами).
Аппарат может дополнительно содержать поворотный привод, выполненный с возможностью поворота ротора вокруг шпинделя. Другими словами, аппарат может дополнительно содержать поворотный привод, выполненный с возможностью поворота ротора вокруг второй оси вращения, образованной шпинделем. Иначе говоря, аппарат может дополнительно содержать поворотный привод, выполненный с возможностью поворота ротора вокруг второй оси вращения, образованной шпинделем во время вращения ротора вокруг первой оси вращения, образованной валом.
Поворотный привод может содержать: первый направляющий элемент на роторе; и второй направляющий элемент на корпусе; причем первый направляющий элемент по форме комплементарен второму направляющему элементу; и один из первого и второго направляющих элементов определяет тракт, ограниченный при вращении ротора другим из первого и второго направляющих элементов; что вызывает поворот ротора вокруг шпинделя.
Тракт может содержать путь, выполненный с возможностью обеспечения поворота ротора вокруг шпинделя.
Направляющий тракт может определять тракт вокруг первой окружности ротора или корпуса, направляющий тракт содержит по меньшей мере: первый изгиб, который направляет указанный тракт от первой стороны первой окружности и ко второй стороне первой окружности; и второй изгиб, который направляет указанный тракт от второй стороны первой окружности и обратно к первой стороне первой окружности.
Направляющий тракт может определять тракт вокруг первой окружности ротора или корпуса, направляющий тракт содержит по меньшей мере: первый изгиб, который направляет указанный тракт от первой стороны первой окружности и затем обратно ко второй стороне первой окружности; и второй изгиб, который направляет указанный тракт от второй стороны первой окружности и затем обратно к первой стороне первой окружности.
Камера (камеры) сжатия может быть выполнена сообщающейся по текучей среде с системой подачи топлива.
Камера (камеры) сжатия может быть выполнена сообщающейся по текучей среде с устройством воспламенения топлива.
Таким образом, может быть предложен аппарат для сжатия текучей среды, который может образовывать часть насоса текучей среды или двигателя внутреннего сгорания, выполненного с возможностью работы с текучей средой согласно требованию посредством использования поворотного ротора и поршневой конструкции.
Таким образом, также могут быть предложены рабочие элементы аппарата для перемещения текучей среды, аппарата для расширения текучей среды и/или аппарата с приводом от текучей среды.
Аппарат может быть описан как «вращательный шарнирный механизм», поскольку ротор по настоящему раскрытию выполнен с возможностью одновременного «вращения» и обеспечения «шарнирного соединения». Поэтому, предложен «вращательный шарнирный аппарат», который может образовывать часть аппарата для сжатия текучей среды (в частности, насоса текучей среды или двигателя внутреннего сгорания), аппарата для перемещения текучей среды, аппарата для расширения текучей среды или аппарата с приводом от текучей среды.
Краткое описание чертежей
Примеры настоящего изобретения раскрыты со ссылкой на прилагаемые чертежи, на которых показано следующее:
на Фигуре 1 показан вид с пространственным разнесением деталей примера аппарата, содержащего узел ротора и корпус в соответствии с настоящим раскрытием;
на Фигуре 2 показан внешний вид в аксонометрии примера корпуса для аппарата, альтернативного показанному на Фигуре 1;
на Фигуре 3 показан вид в аксонометрии узла ротора, показанного на Фигуре 1;
на Фигуре 4 показан пример узла ротора, альтернативный показанному на Фигуре 3;
на Фигуре 5 показан «полупрозрачный» вид в аксонометрии аппарата в соответствии с настоящим раскрытием;
на Фигуре 6 показан альтернативный пример аппарата по отношению к показанному на Фигуре 5;
на Фигуре 7 показан вид сверху корпуса, показанного на Фигуре 5, на котором скрытые детали показаны пунктирными линиями;
на Фигуре 8 показан вид сбоку в разрезе корпуса, показанного на Фигуре 5;
на Фигуре 9 показан вид сверху корпуса, показанного на Фигуре 6, на котором скрытые детали показаны пунктирными линиями;
на Фигуре 10 показан вид сверху корпуса, показанного на Фигуре 6;
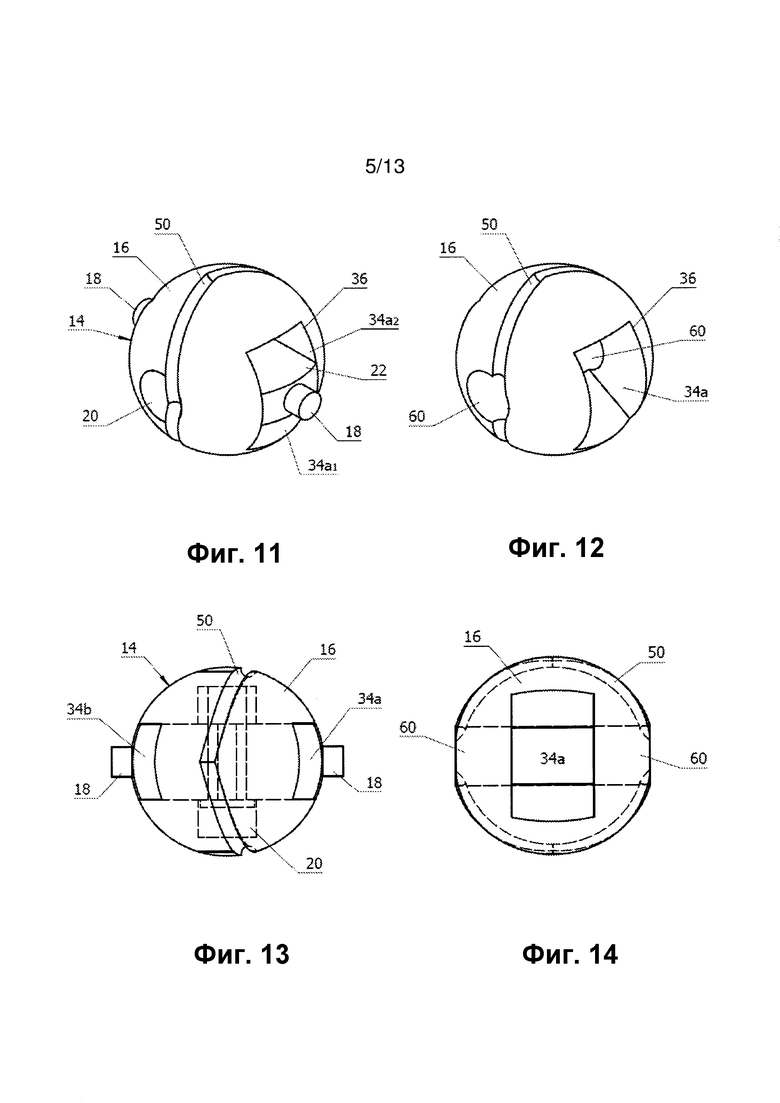
на Фигуре 11 показан альтернативный вид узла ротора, показанного на Фигуре 3;
на Фигуре 12 показан ротор узла ротора с Фигуры 11;
на Фигуре 13 показан вид сверху узла ротора, показанного на Фигуре 11;
на Фигуре 14 показан вид с торца ротора, показанного на Фигуре 12;
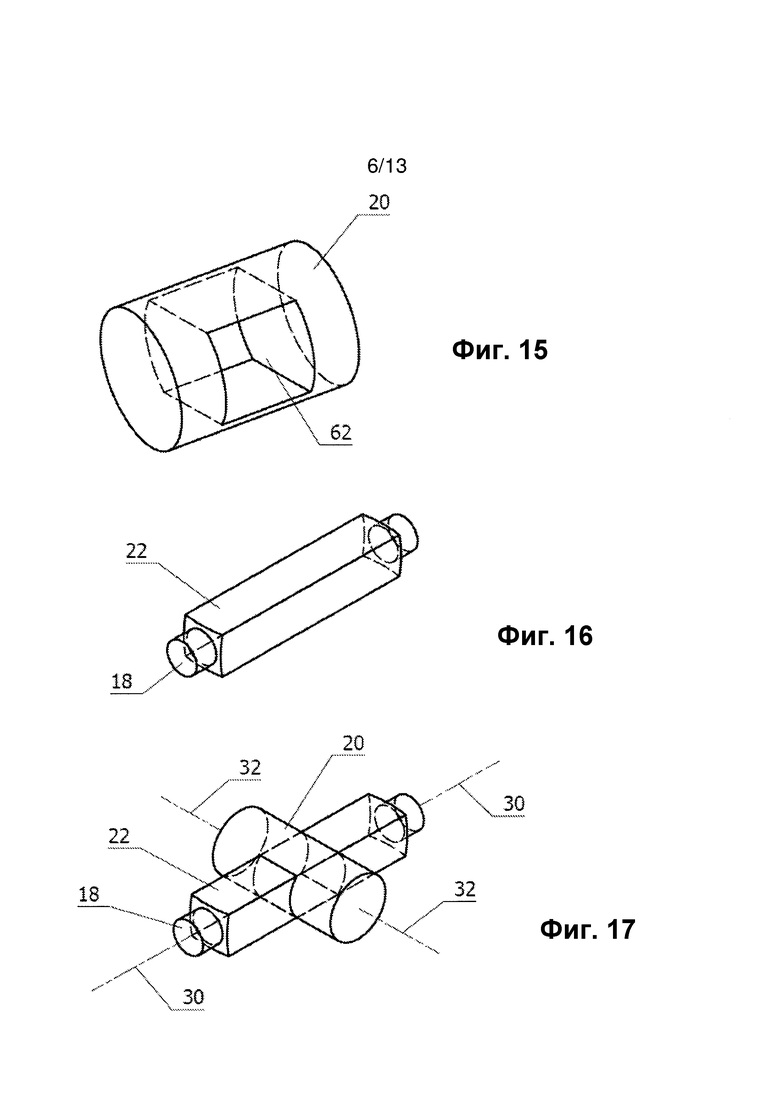
на Фигуре 15 показан вид в аксонометрии шпинделя узла ротора;
на Фигуре 16 показан вид в аксонометрии вала узла ротора;
на Фигуре 17 показан узел шпинделя с Фигуры 15 и вала с Фигуры 16;
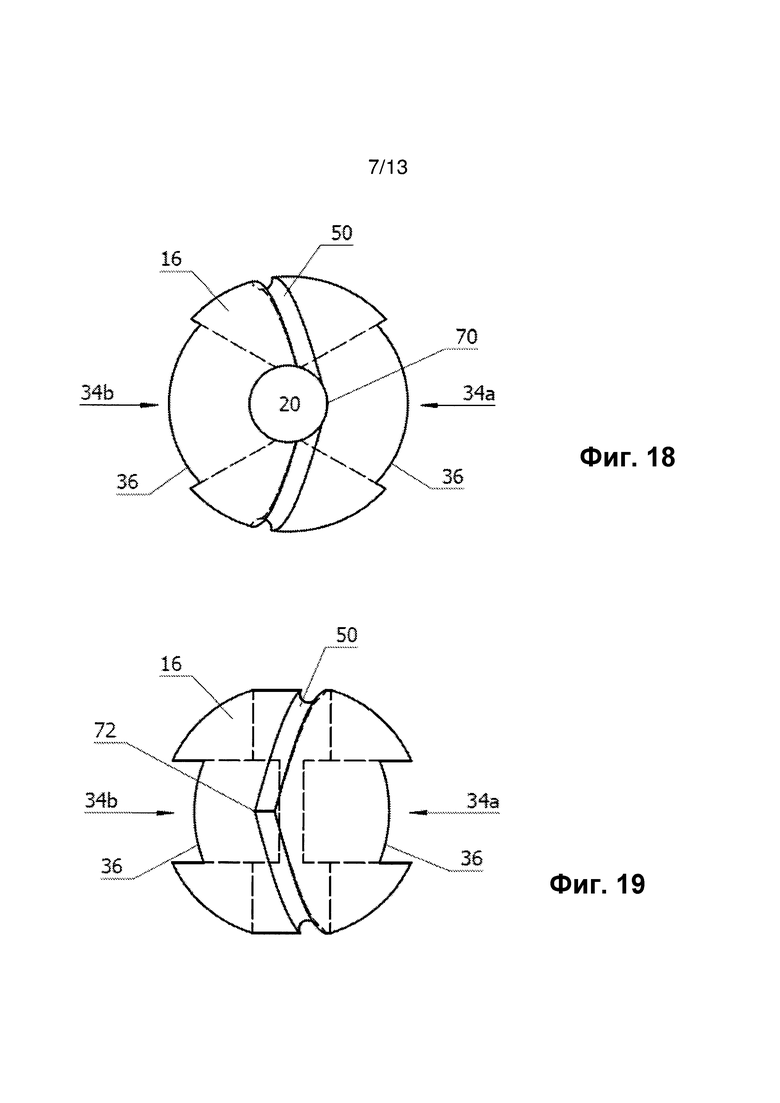
на Фигуре 18 показан вид сбоку ротора с Фигуры 12;
на Фигуре 19 показан вид сверху ротора с Фигуры 12;
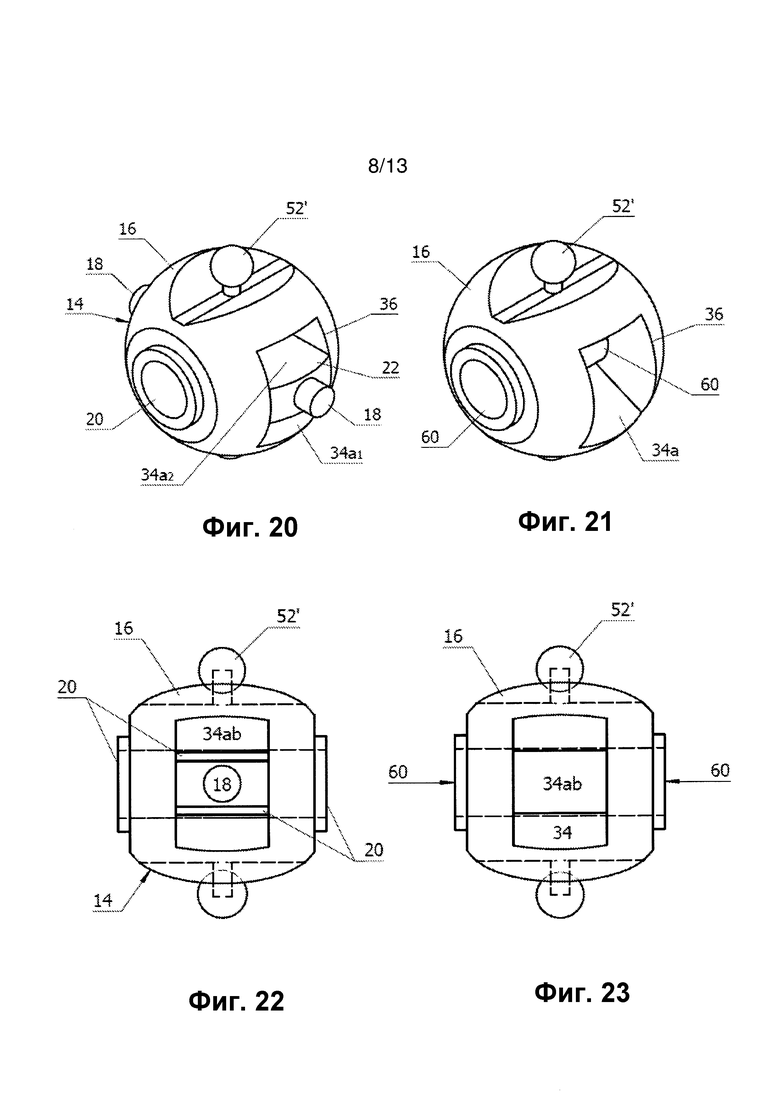
на Фигуре 20 показан альтернативный пример узла ротора;
на Фигуре 21 показан ротор узла ротора с Фигуры 20;
на Фигуре 22 показан вид с торца узла ротора с Фигуры 20;
на Фигуре 23 показан вид с торца ротора с Фигуры 21;
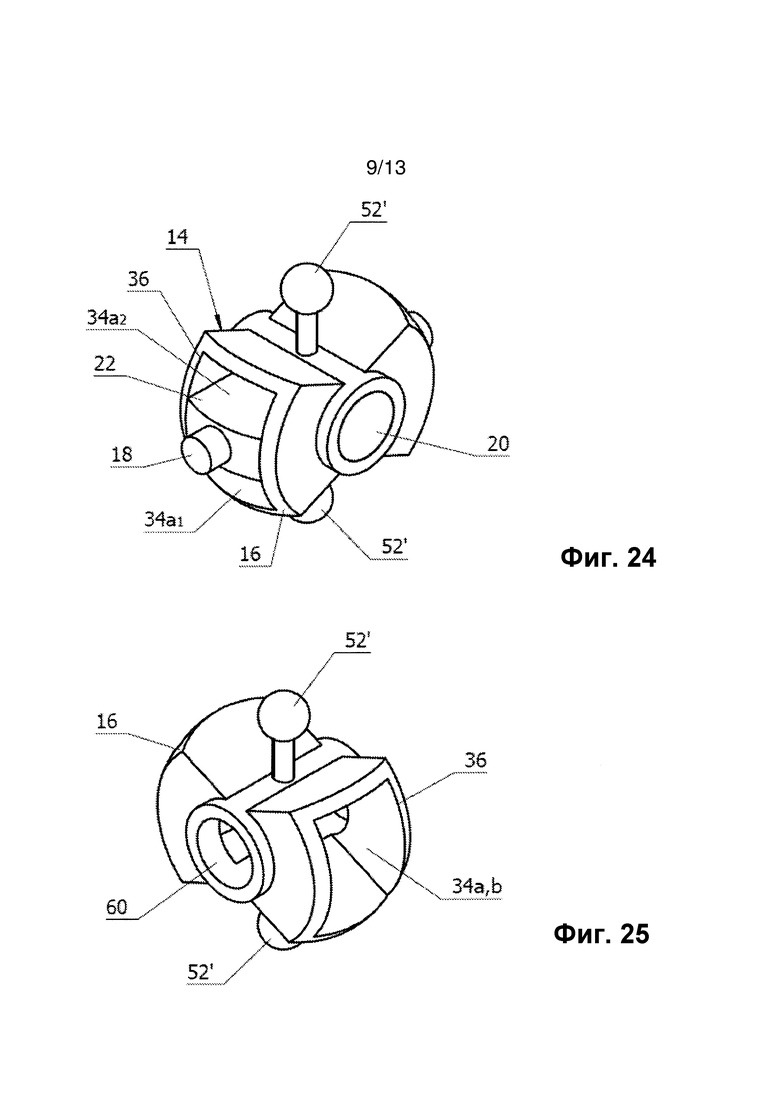
на Фигуре 24 показан дополнительный альтернативный пример узла ротора;
на Фигуре 25 показан вид в аксонометрии ротора узла ротора с Фигуры 24;
на Фигуре 26 показан цикл насоса, содержащего аппарат согласно настоящему раскрытию;
на Фигуре 27 показан вид в аксонометрии с пространственным разнесением деталей альтернативного примера аппарата согласно настоящему раскрытию;
на Фигуре 28 показан «полупрозрачный» вид в аксонометрии корпуса, окружающего узел ротора с Фигуры 27, причем аппарат развернут на 180 градусов;
на Фигуре 29 показан пример цикла работы для примера с Фигур 27, 28;
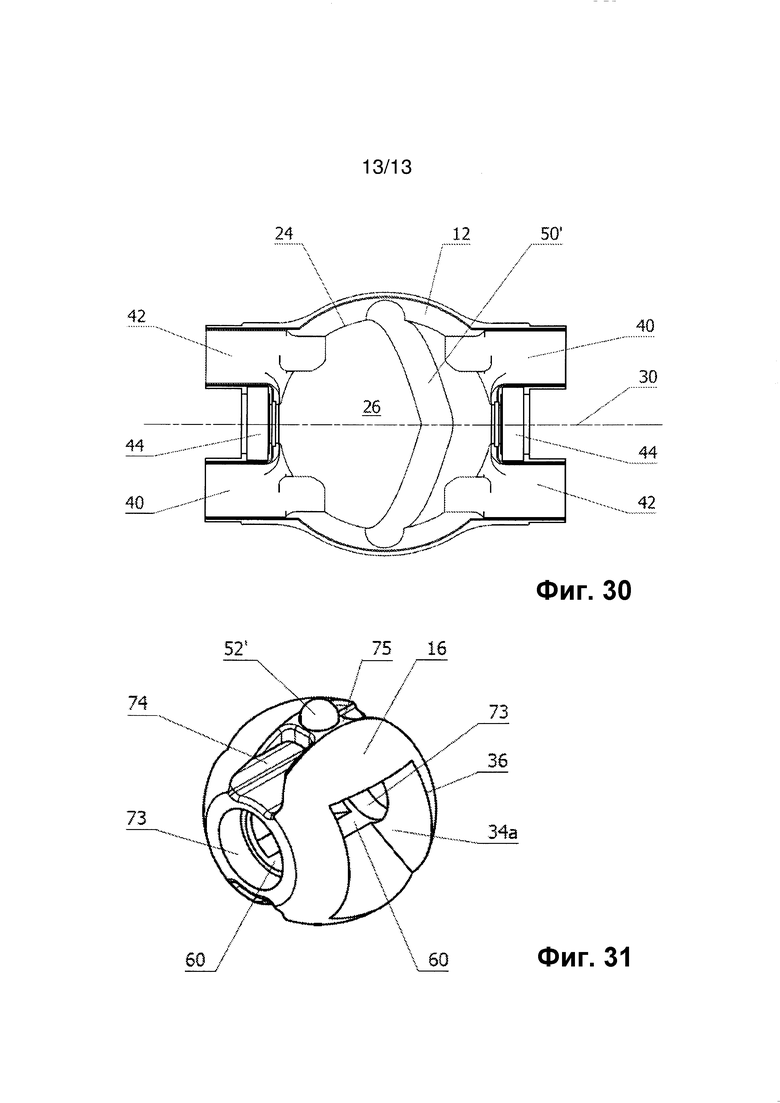
на Фигуре 30 показан вид изнутри альтернативного примера корпуса ротора; и
на Фигуре 31 показан альтернативный пример ротора.
Осуществление изобретения
Ниже раскрыты аппарат и способ согласно настоящему изобретению. Аппарат пригоден для использования в качестве части устройства для сжатия текучей среды (в частности, насоса текучей среды или двигателя внутреннего сгорания), устройства для перемещения текучей среды, устройства для расширения текучей среды и устройства с приводом от текучей среды (например, устройства, приводимого в движение потоком текучей среды, проходящим через него). Другими словами, аппарат может быть специально приспособлен для сжатия, и/или перемещения, и/или протекания, и/или расширения текучей среды. Предполагается, что термин «текучая среда» приводится в его стандартном значении, например: жидкость, газ или комбинация жидкости и газа, или материал, ведущий себя как текучая среда. Раскрыты основные элементы аппарата, а также неограничивающие примеры применений, в которых можно использовать данный аппарат.
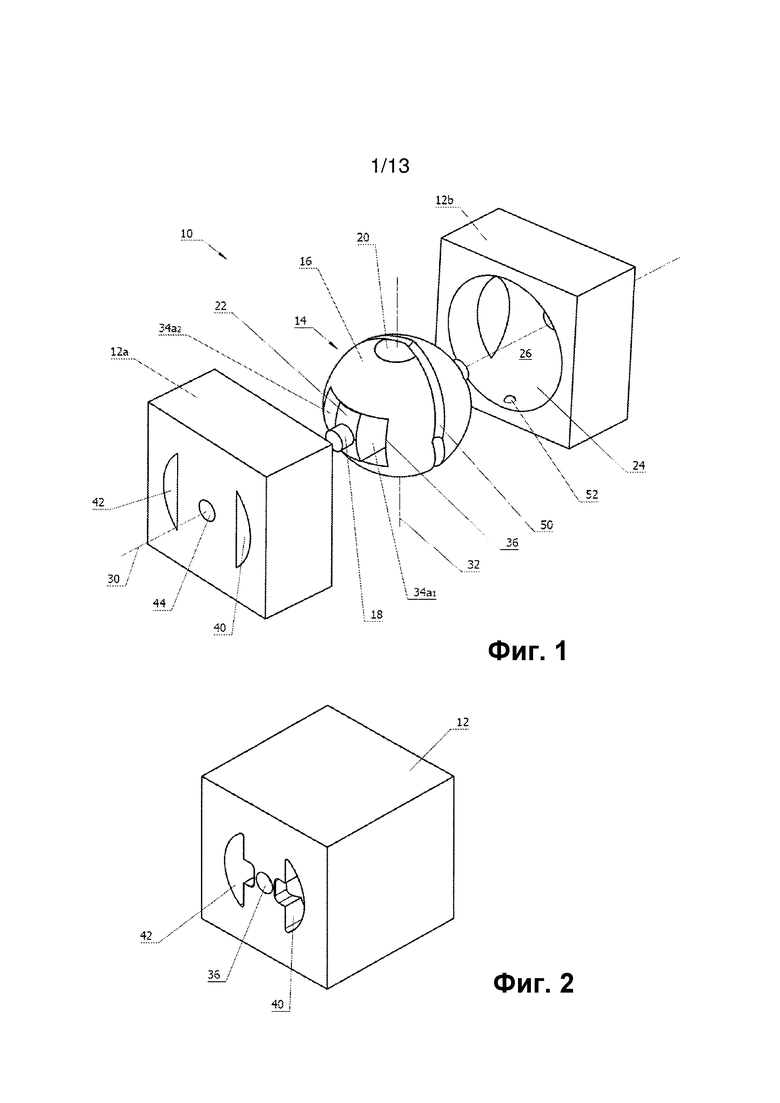
На Фигуре 1 показан вид с пространственным разнесением деталей аппарата 10 в соответствии с настоящим раскрытием, имеющего корпус 12 и узел 14 ротора. На Фигуре 2 показан пример корпуса 12, когда он закрывает узел 14 ротора. В показанном примере корпус 12 разделен на две части 12а и 12b, которые закрывают узел 14 ротора. Однако в альтернативном примере корпус может быть изготовлен более чем из двух частей и может разделяться не так, как показано на Фигуре 1.
Узел 14 ротора содержит ротор 16, вал 18, шпиндель 20 и поршневой элемент 22. Корпус 12 имеет стенку 24, определяющую полость 26, причем ротор 16 выполнен с возможностью вращения и поворота внутри полости 26.
Вал 18 задает первую ось 30 вращения и выполнен с возможностью вращения относительно нее. Шпиндель 20 проходит вокруг вала. Шпиндель проходит под углом к валу 18. Дополнительно, шпиндель задает вторую ось 32 вращения. Иными словами, шпиндель 20 задает вторую ось 32 вращения, а вал 18 проходит через шпиндель 20 под углом к шпинделю 20. На валу 18 предусмотрен поршневой элемент 22.
В показанных примерах аппарат оснащен двумя поршневыми элементами 22, т.е. первым и вторым поршневыми элементами 22. Ротор 16 также определяет две камеры 34a,b, одна из которых диаметрально противоположна другой на одной из двух сторон ротора 16.
В примерах, в которых аппарат представляет собой часть устройства для сжатия текучей среды, каждая камера 34 может быть выполнена как камера сжатия. Аналогично, в примерах, в которых аппарат представляет собой устройство для перемещения текучей среды, каждая камера 34 может быть выполнена как вытеснительная камера (переменного объема). В примерах, в которых аппарат представляет собой устройство для расширения текучей среды, каждая камера 34 может быть выполнена как камера расширения. В примерах, в которых аппарат представляет собой устройство с приводом от текучей среды, каждая камера 34 может быть выполнена как камера протекания текучей среды.
В показанных примерах камеры 34а, 34b сжатия на каждой стороне ротора 16 имеют один и тот же объем. В альтернативных примерах камера сжатия на одной стороне ротора может иметь объем, отличный от объема другой камеры сжатия. Например, в примере, где аппарат образует часть двигателя внутреннего сгорания, камера 34а, которая номинально функционирует в качестве впуска (в частности, в который засасывается воздух), может иметь объем, больший, чем объем камеры 34b на другой стороне ротора 16, которая номинально функционирует в качестве выхода/выпуска.
Хотя поршневой элемент 22 фактически может представлять собой одну деталь, проходящую все расстояние сквозь узел 14 ротора, в данной структуре для эффективности подразумевается, что каждая камера 34 оснащена поршневым элементом 22. Иначе говоря, хотя поршневой элемент 22 может содержать только одну часть, он может образовывать два раздельных поршневых элемента 22 на каждой стороне узла 14 ротора.
Другими словами, первый поршневой элемент 22 проходит от одной стороны шпинделя 20 вдоль вала 18 к одной стороны корпуса 12, а второй поршневой элемент 22 проходит от другой стороны шпинделя 20 вдоль вала к другой стороны корпуса 12. Ротор 16 содержит первую камеру 34а, имеющую первое отверстие 36 на одной стороне узла 16 ротора, и вторую камеру 34b, имеющую второе отверстие 36 на другой стороне узла 16 ротора. Ротор 16 установлен с опорой на шпиндель 20, причем ротор 16 выполнен с возможностью поворота относительно шпинделя 20 вокруг второй оси 32 вращения. Поршневой элемент 22 проходит от шпинделя 20 через камеры 34а,b к отверстиям 36. Между краями поршневого элемента 22 и стенкой ротора 16, определяющей камеру 34, поддерживается малый зазор. Этот зазор может быть достаточно малым для обеспечения уплотнения между краями поршневого элемента 22 и стенкой ротора 16, которая определяет камеру 34. Альтернативно или дополнительно, могут быть предусмотрены уплотнительные элементы между поршневыми элементами 22 и стенкой ротора 16, определяющей камеру 34.
Камеры 34 образованы боковыми стенками (т.е. торцевыми стенками камер 34), которые проходят до и от поршневых элементов 22, причем боковые стенки соединены граничными стенками, проходящими за стороны поршневого элемента 22. Иначе говоря, камеры 34 образованы боковыми/торцевыми стенками и граничными стенками, предусмотренными в роторе 16.
Таким образом, ротор 16 выполнен с возможностью вращения с валом 18 вокруг первой оси 30 вращения и с возможностью поворота относительно шпинделя 20 вокруг второй оси 32 вращения. В результате использования этой конфигурации первый поршневой элемент 22 выполнен с возможностью перемещения (т.е. пересечения) от одной стороны первой камеры 34а до противоположной стороны первой камеры 34а при вращении ротора 16 вокруг первой оси 30 вращения. Другими словами, поскольку ротор 16 выполнен с возможностью вращения с валом 18 вокруг первой оси 30 вращения, и ротор 16 выполнен с возможностью поворота относительно шпинделя 20 вокруг второй оси 32 вращения, во время работы обеспечивается относительное поворотное (т.е. качательное) движение ротора 16 и первого поршневого элемента 22 при вращении ротора 16 вокруг первой оси 30 вращения. Иначе говоря, аппарат выполнен с возможностью обеспечения управляемого поворотного движения ротора 16 относительно первого поршневого элемента 22 при вращении ротора 16 вокруг первой оси 30 вращения.
В примерах, где аппарат представляет собой часть аппарата для сжатия текучей среды, поворотное движение используется для сжатия текучей среды внутри первой камеры 34а при перемещении боковой стенки первой камеры 34а к первому поршневому элементу 22.
В примерах, где аппарат представляет собой часть аппарата для перемещения текучей среды, поворотное движение используется для вытеснения текучей среды из первой камеры 34а при движении боковой стенки первой камеры 34а к первому поршневому элементу 22.
В примерах, где аппарат представляет собой часть аппарата для расширения текучей среды, поворотное движение вызвано расширением текучей среды внутри первой камеры 34а и приводит к перемещению боковой стенки первой камеры 34а от первого поршневого элемента 22.
В примерах, где аппарат представляет собой часть аппарата с приводом от текучей среды, поворотное движение вызвано потоком текучей среды в первую камеру 34а и приводит к перемещению боковой стенки первой камеры 34а от первого поршневого элемента 22.
Также в результате использования этой конфигурации второй поршневой элемент 22 выполнен с возможностью перемещения (т.е. пересечения) от одной стороны второй камеры 34а до противоположной стороны второй камеры 34b при вращении ротора 16 вокруг первой оси 30 вращения. Другими словами, поскольку ротор 16 выполнен с возможностью вращения с валом 18 вокруг первой оси 30 вращения, и ротор 16 выполнен с возможностью поворота относительно шпинделя 20 вокруг второй оси 32 вращения, во время работы обеспечивается относительное поворотное (т.е. качательное) движение ротора 16 и обоих поршневых элементов 22 при вращении ротора 16 вокруг первой оси 30 вращения. Иначе говоря, аппарат выполнен с возможностью обеспечения управляемого поворотного движения ротора относительно обоих поршневых элементов 22 при вращении ротора 16 вокруг первой оси 30 вращения.
В примерах, где аппарат представляет собой часть аппарата для сжатия текучей среды, текучая среда, таким образом, сжимается внутри второй камеры 34b при одновременном сжатии текучей среды внутри первой камеры 34а на противоположной стороне узла 16 ротора. Таким образом, поворотное движение используется для сжатия текучей среды внутри первой и второй камер 34а,b при перемещении боковых стенок камер 34а,b к их соответствующим поршневым элементам 22.
В примерах, где аппарат представляет собой часть аппарата для перемещения текучей среды, текучая среда, таким образом, перемещается внутри второй камеры 34b при одновременном перемещении текучей среды внутри первой камеры 34а на противоположной стороне узла 16 ротора.
В примерах, где аппарат представляет собой часть аппарата для расширения текучей среды, текучая среда, таким образом, расширяется внутри второй камеры 34b при одновременном расширении текучей среды внутри первой камеры 34а на противоположной стороне узла 16 ротора.
В примерах, где аппарат представляет собой часть аппарата с приводом от текучей среды, поворотное движение вызвано потоком текучей среды в камеру 34b и приводит к перемещению боковой стенки первой камеры 34b от первого поршневого элемента 22, и в то же время поток текучей среды в камеру 34а приводит к перемещению боковой стенки первой камеры 34а от первого поршневого элемента 22.
Другими словами, при вращении ротора 16 и первого поршневого элемента 22 вокруг первой оси 30 вращения, и по мере поворота ротора 16 вокруг второй оси 32 вращения, обеспечивается относительное поворотное (т.е. качательное) движение ротора 16 и первого поршневого элемента 22, которое изменяет объем первой камеры, причем изменение объема камеры связано с вращением ротора 16 вокруг первой оси 30 вращения. Как раскрывается ниже, относительное поворотное движение обеспечивается поворотным приводом.
В примерах, где аппарат образует часть насоса текучей среды, ротор 16 и первый поршневой элемент 22 поворачиваются (т.е. движутся) относительно друг друга в результате вращения ротора 16 вокруг первой оси 30 вращения.
В примерах, где аппарат образует часть двигателя внутреннего сгорания, ротор 16 и первый поршневой элемент 22 поворачиваются (т.е. движутся) относительно друг друга, что приводит к вращению ротора 16 вокруг первой оси 30 вращения.
Крепление ротора 16 с возможностью его поворота (т.е. качения) относительно поршневых элементов 22 подразумевает, что обеспечивается подвижное разделение между двумя половинами каждой из камер 34а,b с образованием подкамер 34а1, 34а2, 34b3, 34b4 внутри камер 34а, 34b. При работе объем каждой подкамеры 34а1, 34а2, 34b3 и 34b3 изменяется в зависимости от относительной ориентации ротора 16 и поршневых элементов 22.
Когда корпус 12 закрывает узел 14 ротора, ротор 16 расположен относительно стенки 24 корпуса таким образом, что между отверстием 34 камеры и большей частью стенки 24 поддерживается малый зазор. Этот зазор может быть достаточно малым для обеспечения уплотнения между ротором 16 и стенкой 24 корпуса.
Альтернативно или дополнительно, в зазоре между стенкой 24 корпуса и ротором 16 могут быть предусмотрены уплотнительные элементы.
Для передачи текучей среды в камеры 34а,b и из них предусмотрены порты. Для каждой камеры 34 корпус 12 может содержать впускной порт 40 для подачи текучей среды в камеру 34 и выпускной порт 42 для вывода текучей среды из камеры 34. Впускной и выходной/выпускной порты 40, 42 показаны с различными геометриями на Фигуре 1 и Фигуре 2. На Фигуре 1 порты показаны «в форме полумесяца», а на Фигуре 2 «Т-образными». Оба примера геометрий являются неограничивающими и могут использоваться в зависимости от требуемой конфигурации аппарата. Порты 40, 42 проходят через корпус и выходят на стенку 24 корпуса 12. Также предусмотрена опорная конструкция 44 для обеспечения опоры для концов вала 18. Опорная конструкция может быть любого традиционного типа, пригодного для данного применения.
Порты 40, 42 могут иметь такие размеры и могут быть расположены на корпусе 12 таким образом, что при работе, когда соответствующие отверстия 36 камеры движутся мимо портов 40, 42, в первом относительном положении отверстия 36 совмещены с портами 40, 42 так, что отверстия камеры полностью открыты, во втором относительном положении отверстия 36 не совмещены с портами так, что отверстия 36 полностью закрыты стенкой 24 корпуса 12, а в промежуточном относительном положении отверстия 36 частично совмещены с портами 40, 42 так, что отверстия 36 частично закрыты стенкой корпуса 24.
Альтернативно, порты 40, 42 могут иметь такие размеры и могут быть расположены на корпусе 12 таким образом, что при работе, в первом диапазоне (или множестве) относительных положений портов 40, 42 и соответствующих отверстий 36 ротора, порты 40, 42 и отверстия 36 ротора не совмещены так, что отверстия 36 полностью закрыты стенкой 24 корпуса 12 для предотвращения потока текучей среды между камерой (камерами) 34а,b и портом (портами) 40, 42. В то же время отверстие портов 40, 42 может быть также закрыто периферией тела ротора для предотвращения потока текучей среды между камерой (камерами) 34а,b и портом (портами) 40, 42. Во втором диапазоне (или множестве) относительных положений портов 40, 42 и соответствующих отверстий 36 камеры ротора, отверстия 36 по меньшей мере частично совмещены с портами 40, 42 так, что отверстия 36 по меньшей мере частично открыты для пропускания потока текучей среды между камерой (камерами) 34а,b и портом (портами) 40, 42.
Расположение и размеры портов могут изменяться в соответствии с применением (т.е. при использовании в качестве части аппарата для перекачки текучей среды, аппарата для перемещения текучей среды, аппарата для расширения текучей среды или аппарата с приводом от текучей среды) для обеспечения наилучшей возможной эффективности эксплуатации. Положения портов, раскрытые в настоящей заявке и показанные на фигурах, лишь указывают на общий принцип поступления и выхода среды (в частности, текучей среды).
В некоторых примерах аппарата по настоящему раскрытию (не показаны) входные порты и выходные порты могут быть снабжены механическими или электромеханическими клапанами, выполненными с возможностью управления потоком рабочей среды/текучей среды через порты 40, 42.
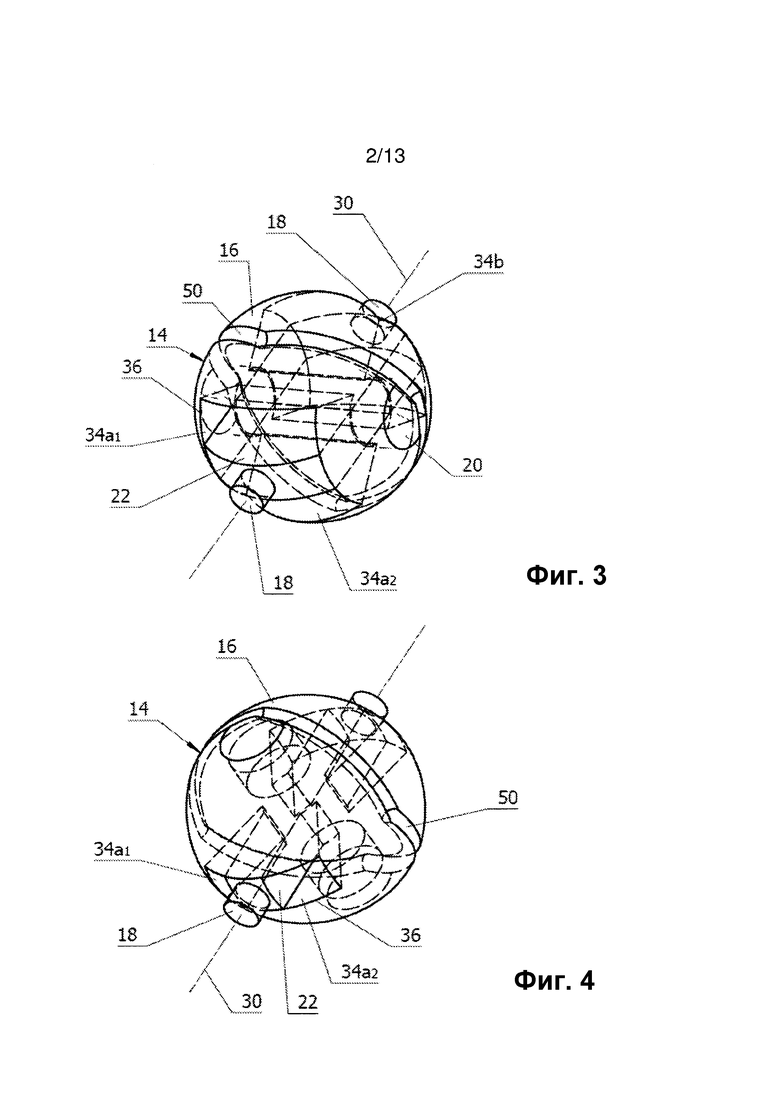
На Фигурах 3, 4 показан увеличенный вид двух примеров узла 14 ротора в соответствии с настоящим раскрытием.
Пример с Фигуры 3 соответствует примеру, показанному на Фигуре 1. Однако, для сравнения, пример с Фигуры 4 показан в качестве альтернативного примера с поворотом на 90 градусов вокруг первой оси 30 вращения, по сравнению с примером с Фигуры 3. Эти два примера по существу идентичны, однако в примере с Фигуры 4 камера 34 имеет другое характеристическое отношение по сравнению с показанными на Фигуре 3, причем поршневой элемент 22 значительно уже. Следует понимать, что характеристическое отношение камеры 34 и, следовательно, ширина поршневого элемента 22 будут выбираться в соответствии с требуемым объемом аппарата.
Аппарат содержит поворотный привод, выполненный с возможностью (т.е. пригодный для) поворота ротора 16 вокруг шпинделя 20. Другими словами, аппарат может дополнительно содержать поворотный привод, выполненный с возможностью (т.е. пригодный для) поворота ротора 16 вокруг второй оси 32 вращения, образованной шпинделем 20. Поворотный привод может быть выполнен с возможностью поворота ротора 16 на любой угол, подходящий для надлежащей работы аппарата. Например, поворотный привод может быть выполнен с возможностью поворота ротора 16 на угол, по существу приблизительно равный 60 градусам.
Поворотный привод может содержать, как показано в примерах, первый направляющий элемент на роторе 16 и второй направляющий элемент на корпусе 12. Таким образом, поворотный привод обеспечивает механическую связь между ротором 16 и корпусом 12 и выполнен с возможностью вызывать управляемое относительное поворотное движение ротора 16 относительно поршневого элемента 22 при вращении ротора 16 вокруг первой оси 30 вращения. Другими словами, предусмотрено относительное движение ротора 16, действующее на направляющие элементы поворотного привода, что вызывает поворотное движение ротора 16.
Первый направляющий элемент по форме комплементарен второму направляющему элементу. Один из первого и второго направляющих элементов определяет тракт, ограничиваемый другим из первого и второго направляющих элементов при вращении ротора вокруг первой оси 30 вращения. Этот тракт, который, возможно, предусмотрен в виде канавки, содержит путь, выполненный с возможностью побуждения ротора 16 поворачиваться вокруг шпинделя 20 и оси 32. Этот путь также обеспечивает выигрыш в силе при вращении и повороте ротора 16.
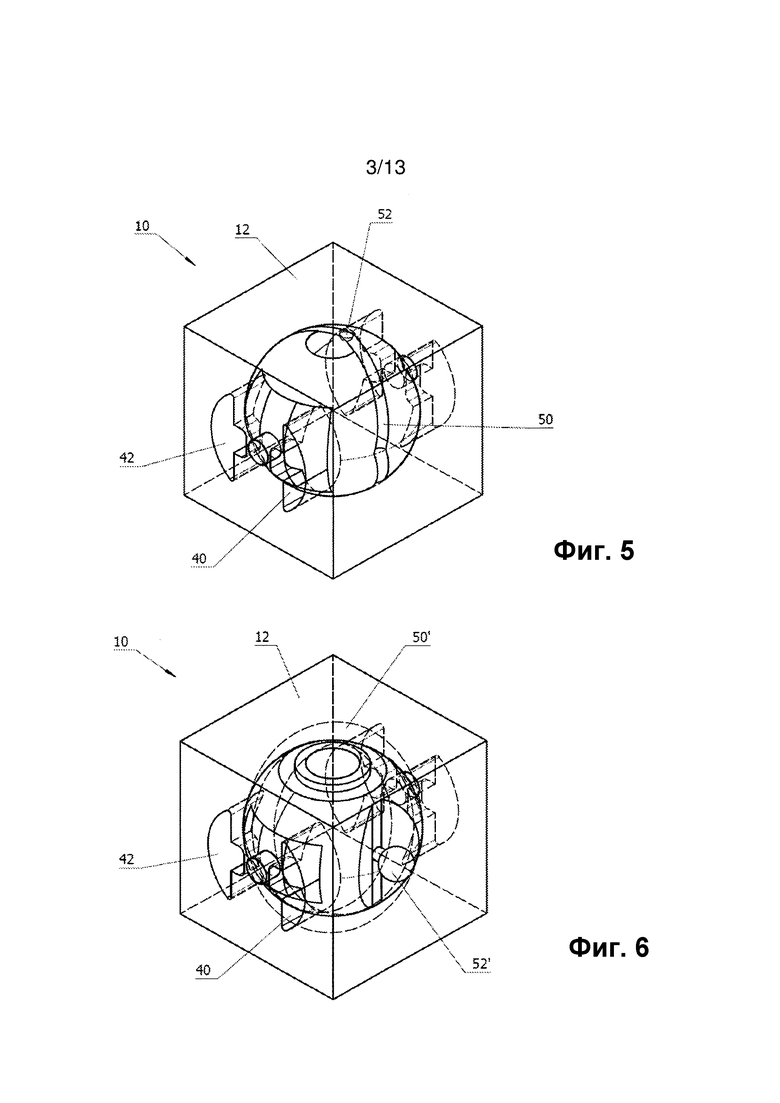
Неограничивающий пример поворотного привода проиллюстрирован в примерах, показанных на Фигурах 5 и 6. На этих фигурах аппарат 10, показанный на Фигуре 5, соответствует аппарату, показанному на Фигурах 1, 2.
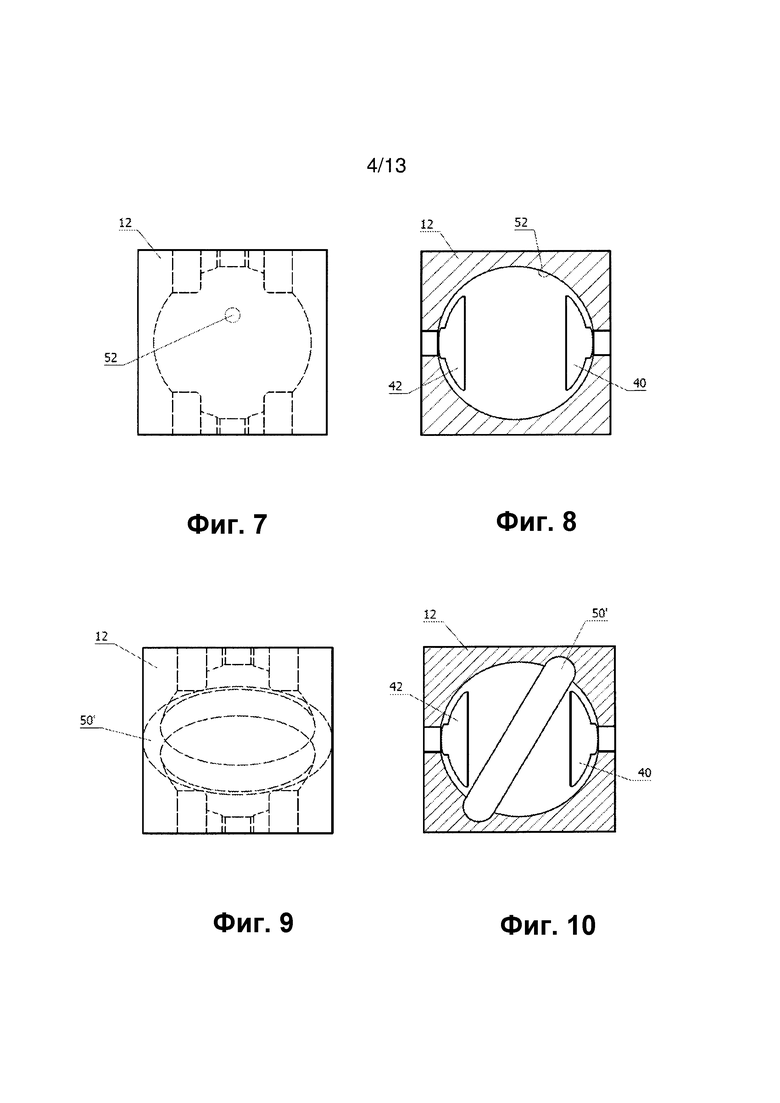
В роторе предусмотрена направляющая канавка 50, а в стенке 24 корпуса 12 предусмотрен наконечник 52 (как можно видеть на Фигуре 1), размещаемый внутри канавки 50. Однако, в альтернативном примере, показанном на Фигуре 6, наконечник 52' предусмотрен на роторе 16, а направляющая канавка 50' предусмотрена в корпусе 12. Другими словами, направляющий тракт 50, 50' может быть предусмотрен на роторе или корпусе, а другой направляющий элемент, наконечник 52, 52', может быть также предусмотрен или на роторе 16, или на корпусе 12.
Эти примеры также проиллюстрированы со ссылкой на поперечный разрез, показанный на Фигурах 7 и 8, которые соответствуют примеру с Фигуры 5, и на Фигурах 9, 10, которые соответствуют примеру с Фигуры 6.
На Фигурах 11, 12 показан узел 16 ротора и ротор 14 в соответствии с примерами, показанными на Фигурах 1, 3. Ротор является по существу сферическим. Для удобства на Фигуре 11 показан полностью узел 14 ротора с валом 18, шпиндель 20 и установленным поршневым элементом 22. Напротив, на Фигуре 12 показаны сам ротор 16 и полость 60, проходящая через ротор 14 и выполненная с возможностью вмещения шпинделя 20. На Фигуре 13 показан вид сверху компоновки, показанной на Фигуре 11, а на Фигуре 14 показан вид с торца сверху вниз на отверстие 36, определяющее камеру 34 ротора 14.
Ротор 14 может состоять из одной или более частей, собранных вместе вокруг узла вала 18 и шпинделя 20. Альтернативно, ротор 16 может быть выполнен в виде одной детали, образованной как цельная деталь или изготовленной из нескольких деталей с образованием единого элемента, и в этом случае шпиндель 20 может быть вставлен в полость 60, а затем вал 18 и поршневой элемент 22 могут быть вставлены в канал 62, образованный в шпинделе 20, а затем они могут быть скреплены друг с другом.
На Фигуре 15 показан вид в аксонометрии шпинделя, имеющего канал 62 для вмещения шпинделя 18 и поршневого элемента 22. Шпиндель 20 является по существу цилиндрическим. На Фигуре 16 показана примерная конфигурация вала 18 и поршневого элемента 22. Вал 18 и поршневой элемент 22 могут быть образованы как одно целое, как показано на Фигуре 16, или могут быть изготовлены из нескольких частей. Поперечное сечение поршневого элемента 22 является по существу квадратным или прямоугольным. Как показано на фигурах, вал 18 может содержать цилиндрические опорные области, проходящие от поршневого элемента 22 с целью установки опорной конструкции 44 корпуса 12 и, таким образом, для обеспечения возможности вращения вала 18 вокруг первой оси 30 вращения.
На Фигуре 17 показаны вал 18 и поршневой элемент 20 в сборе со шпинделем 20. Они могут быть образованы как узел, как раскрывалось выше, или они могут быть выполнены как одно целое, возможно, с помощью литья или ковки.
Шпиндель 20 может быть размещен по существу в центре вала 18 и поршневого элемента 22. Другими словами, шпиндель 20 может быть размещен по существу по середине между двумя концами вала 18. В собранном состоянии вал 18, шпиндель 20 и поршневой элемент 22 могут быть зафиксированы относительно друг друга. Шпиндель 20 может быть по существу перпендикулярен валу и поршневому элементу 22, и, таким образом, вторая ось 32 вращения может быть по существу перпендикулярна первой оси 30 вращения.
Поршневые элементы 22 имеют такие размеры, что они оканчиваются вблизи стенки 24 корпуса 12, причем между концом поршневых элементов 22 и стенкой 24 корпуса поддерживается малый зазор. Этот зазор может быть достаточно малым для обеспечения уплотнения между поршневыми элементами 22 и стенкой 24 корпуса. Альтернативно или дополнительно, в зазоре между стенкой 24 корпуса и поршневыми элементами 22 могут быть предусмотрены уплотнительные элементы.
Как ясно показано на Фигурах 18, 19, в примере, где направляющий элемент предусмотрен в виде тракта на роторе 16, направляющий тракт 50 образует тракт вокруг (т.е. на, вблизи и/или с каждой стороны) первой окружности ротора или корпуса. В этом примере плоскость первой окружности перекрывает или совпадает с плоскостью, образуемой второй осью 32 вращения при ее вращении вокруг первой оси 30 вращения. То же самое справедливо для примеров, схожих с примером, показанным на Фигуре 6, где тракт 50' предусмотрен в корпусе 12.
Направляющий тракт 50, 50' содержит по меньшей мере первую точку 70 изгиба, в которой тракт направляется от первой стороны первой окружности, а затем ко второй стороне первой окружности, и вторую точку 72 изгиба, в которой тракт 50, 50' направляется от второй стороны первой окружности, а затем обратно к первой стороне первой окружности. Тракт 50 не повторяет путь первой окружности, а, напротив, колеблется от стороны к стороне первой окружности. Другими словами, тракт 50 не повторяет путь первой окружности, а образует синусоидальною траекторию между двумя сторонами первой окружности. Тракт 50 может быть смещен от второй оси 32 вращения. Таким образом, при повороте ротора 16 вокруг первой оси 30 вращения, взаимодействие тракта 50, 50' и наконечника 52, 52' приводит к наклону (т.е. качанию или повороту) ротора 16 назад и вперед вокруг шпинделя 20 и, тем самым, вокруг второй оси 32 вращения.
В таком примере расстояние, на которое проходит направляющий тракт от изгиба 70, 72 на одной стороне первой окружности до изгиба 70, 72 на другой стороне окружности, определяет отношение между углом поворота ротора 16 вокруг второй оси 32 вращения и углом поворота вала 18 вокруг первой оси 30 вращения. Количество изгибов 70, 72 определяет отношение числа поворотов (например, циклов сжатия, расширения, перемещения и т.д.) ротора 16 вокруг второй оси 32 вращения на оборот ротора 16 вокруг первой оси 30 вращения.
Другими словами, общее направление направляющего тракта 50, 50' определяет наклон, амплитуду и частоту вращения ротора 16 вокруг второй оси 32 вращения относительно вращения первой оси 30 вращения, тем самым определяя отношение углового перемещения камер 34 к радиальному перемещению относительно вала (или наоборот) в любой точке.
Иначе говоря, положение тракта 50, 50' непосредственно определяет механическое соотношение/взаимосвязь между скоростью вращения ротора и скоростью изменения объема камер 34а, 34b ротора. Другими словами, траектория тракта 50, 50' непосредственно определяет механическое соотношение/взаимосвязь между скоростью вращения ротора 16 и скоростью изменения поворота ротора 16. Таким образом, скорость изменения объема камеры относительно скорости вращения узла 14 ротора определяется резкостью траектории изменения (т.е. изгибом) направляющего тракта.
Профиль канавки может быть настроен для получения различных характеристик перемещения/сжатия, поскольку двигатели сгорания для сжигания бензина, дизельного топлива (и других типов топлива), для перекачивания и расширения могут требовать различных характеристик и/или настройки во время срока службы узла ротора. Иначе говоря, траектория тракта 50, 50' может быть различной.
Таким образом, направляющий тракт 50, 50' обеспечивает «настраиваемый тракт кривошипа», который может быть заранее настроен под любое применение аппарата.
Альтернативно, элементы, задающие направляющий тракт 50, 50', могут быть выполнены с возможностью перемещения для обеспечения возможности регулировки тракта 50, 50', что может обеспечить динамическую регулировку тракта кривошипа во время работы аппарата. Это может позволить настройку скорости и величины вращения ротора вокруг второй оси вращения для улучшения характеристик управления и/или эффективности аппарата. Иначе говоря, возможность регулировки тракта кривошипа позволяет изменять механическое соотношение/взаимосвязь между скоростью вращения ротора и скоростью изменения объема камер 34а, 34b ротора. Таким образом, тракт 50, 50' может быть предусмотрен как элемент канала или подобный ему элемент, который соответствует ротору 12 и корпусу 16 ротора и который может быть перемещен и/или отрегулирован, частично или целиком, относительно ротора 12 и корпуса 16 ротора.
Узел 14 ротора, схожий с примером, показанным на Фигуре 6, показан на Фигурах 20-23. Как можно видеть, он подобен примерам, показанным на Фигурах 11-14, за исключением того, что вместо направляющей канавки 50 на роторе 16 предусмотрен наконечник 52' на роторе 16 для взаимодействия с направляющей канавкой 50' на корпусе 12.
Дополнительный пример корпуса 14 ротора и ротора 16 показан на Фигурах 24, 25. Он по большей части аналогичен примерам с Фигур 20-23, за исключением того, что вместо по существу сферического тела ротора ротор 16 содержит по существу меньше материала, предусмотрены только стенки для образования камер 34 и полости 60 для вмещения шпинделя 20. Во всех других аспектах он аналогичен примерам с Фигур 20-23.
На Фигуре 30 показан альтернативный вариант корпуса, показанного на Фигурах 6, 9, 10. На Фигуре 30 показана половина корпуса в разрезе по горизонтальной плоскости, в которой расположена первая ось 30 вращения. В этом примере форма входных и выходных портов 40, 42 изменена с формы Т на внутренней стороне корпуса на по существу круглую форму на внешней поверхности корпуса 12. Направляющий тракт 52 задает путь с изгибом, отличный от показанного на Фигурах 6, 9, 10. Как раскрывалось ранее, при работе тракт и изгиб задают скорость изменения перемещения ротора 16 относительно поршня 22, что позволяет добиться полноценного влияния на механический выигрыш между вращением и поворотом ротора 16. Путь может быть оптимизирован для соответствия потребностям приложения. Другими словами, направляющий тракт может быть спроектирован для удовлетворения требований различных приложений.
На Фигуре 31 показан другой неограничивающий пример ротора 16, схожий с примером, показанным на Фигурах 21, 25. Показаны опорные кромки 73, предназначенные для взаимодействия с опорным узлом (например, роликовой опорной конструкцией) или обеспечения опорной поверхности для установки ротора 16 с опорой на шпиндель 20. Показан также «вырез» 74, предусмотренный в виде полости в некритичной области ротора, который уменьшает вес конструкции (т.е. обеспечивает снижение веса) и обеспечивает кромку для обхвата/сжатия/поддержки ротора 16 во время производства. Также может быть предусмотрена дополнительная кромка 75 возле наконечника 52'для обхвата/сжатия/поддержки ротора 16 во время производства.
В примерах, в которых аппарат используется в качестве насоса текучей среды (в частности, для сжатия и/или перемещения текучей среды), вал 18 может быть соединен с приводным мотором для поворота ротора внутри корпуса 12.
В примерах, в которых аппарат образует часть двигателя внутреннего сгорания, вал 18 может быть соединен со средством отбора мощности, коробкой передач или другим устройством, приводимым в движение за счет самоподдерживающегося вращения узла ротора. В таком примере камеры 34 могут сообщаться по текучей среде с системой подачи топлива (например, воздухом) и сообщаться по текучей среде с устройством воспламенения топлива (например, устройством искрового зажигания). Аппарат также может быть выполнен так, чтобы в заранее определенной точке в цикле сжатия топливо могло быть введено, сжато, воспламенено и сожжено для расширения текучей среды в камерах, тем самым для приведения в движение поршневого элемента 22 и, таким образом, поддержания вращения узла 14 ротора. Зажигание может быть инициировано из различных мест, например, из корпуса 12, в открытое входное отверстие 32 цилиндра, или в центре камеры 34, посредством изолированного электрода, установленного внутри тела ротора, или создания контакта со стационарным источником питания, синхронизированным соответствующим образом.
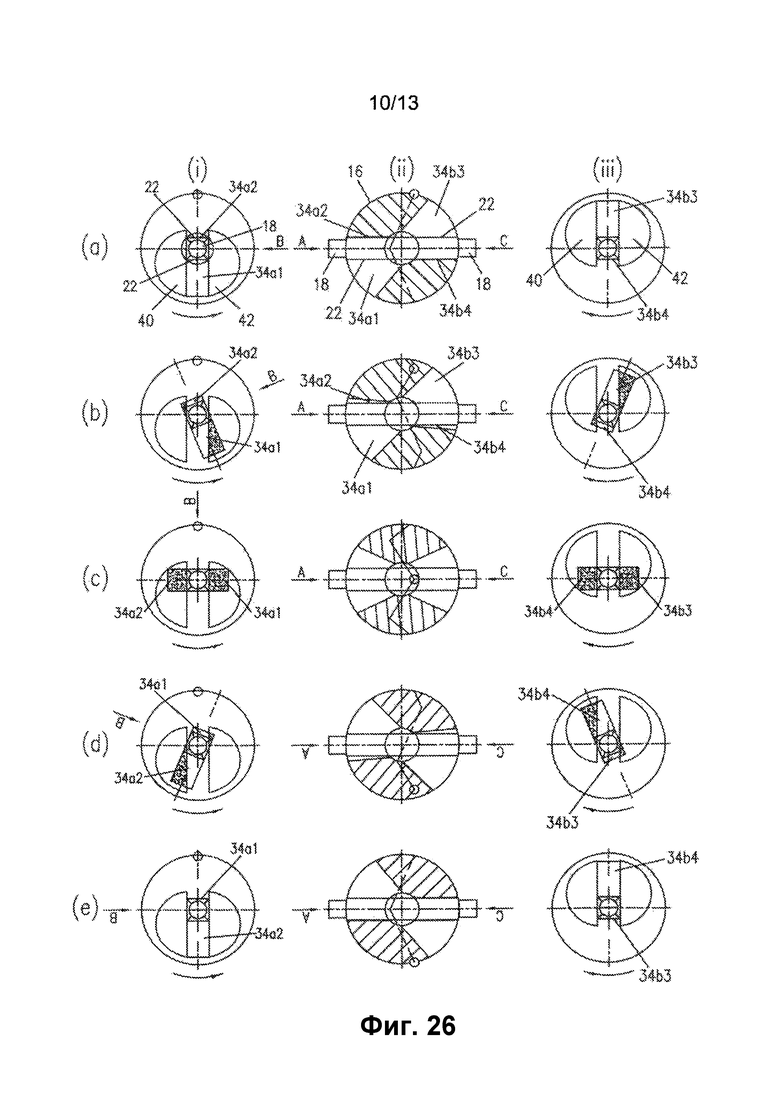
На Фигуре 26 проиллюстрировано, как функционируют примеры с Фигур 1-25, когда они выполнены в качестве насоса текучей среды (в частности, аппарата для сжатия текучей среды и/или аппарата для перемещения текучей среды). Центральная фигура (и) в каждом ряду иллюстрирует вид в поперечном разрезе ротора 16 с установленными валом 18 и поршневым элементом 22. На фигуре слева (i) показан вид с торца центральной фигуры (и). На фигуре (iii) справа показан вид с торца с противоположной стороны узла ротора. Узел ротора является симметричным.
На Фигуре 26(a) показано состояние каждой подкамеры 34а1, 34а2, 34b3, 34b4 в номинальном угловом положении 0 градусов в рабочем цикле. Подкамеры 34а1, 34b3 имеют полный объем, наполнены текучей средой и вскоре начнут цикл выпуска через выпускной порт 42. Подкамеры 34а2, 34b4 полностью сжаты/смещены, опустошены и готовы к началу цикла наполнения через впускной порт 40.
На Фигуре 26(b) показано состояние каждой из подкамер 34а1, 34а2, 34b3, 34b4, повернутых в положение 22,5 градуса в рабочем цикле. Подкамеры 34а1, 34b3 начинают сжатие/перемещение и начинают выпуск через выпускной порт 42. Напротив, объем подкамер 34а2, 34b4 начинает увеличивается (т.е. расширяться) и втягивать текучую среду через впускной порт 40.
На Фигуре 26(c) показано состояние каждой из подкамер 34а1, 34а2, 34b3, 34b4, повернутых в положение 90 градусов в рабочем цикле. Подкамеры 34а1, 34b3 находятся посередине между сжатием/перемещением и выпуском через выпускной порт. Напротив, подкамеры 34а2, 34b4 находятся посередине между расширением и продолжением втягивания текучей среды через впускной порт.
На Фигуре 26(d) показано состояние каждой из подкамер 34а1, 34а2, 34b3, 34b4, повернутых в положение 157,5 градусов в рабочем цикле. Подкамеры 34а1, 34b3 приближаются к полному сжатию/перемещению и почти пусты. Напротив, подкамеры 34а2, 34b4 приближаются к полному расширению и почти полностью наполнены текучей средой.
На Фигуре 26(e) показано состояние каждой из подкамер 34а1, 34а2, 34b3, 34b4, повернутых в положение 180 градусов в рабочем цикле. Подкамеры 34а2, 34b4 полностью сжаты/опустошены, пусты и готовы к началу цикла наполнения. Напротив, подкамеры 34а2, 34b4 полностью расширены и загружены и готовы к началу цикла выпуска. После этой точки цикл может начаться снова, но стоит заметить, что в точке 180 градусов задачи подкамер 34а1, 34а2 полностью изменяются на задачи подкамер 34b3 и 34b4. Между точками 180 градусов и 360 градусов вышеуказанный процесс повторяется в соответствии с этим полным изменением задач.
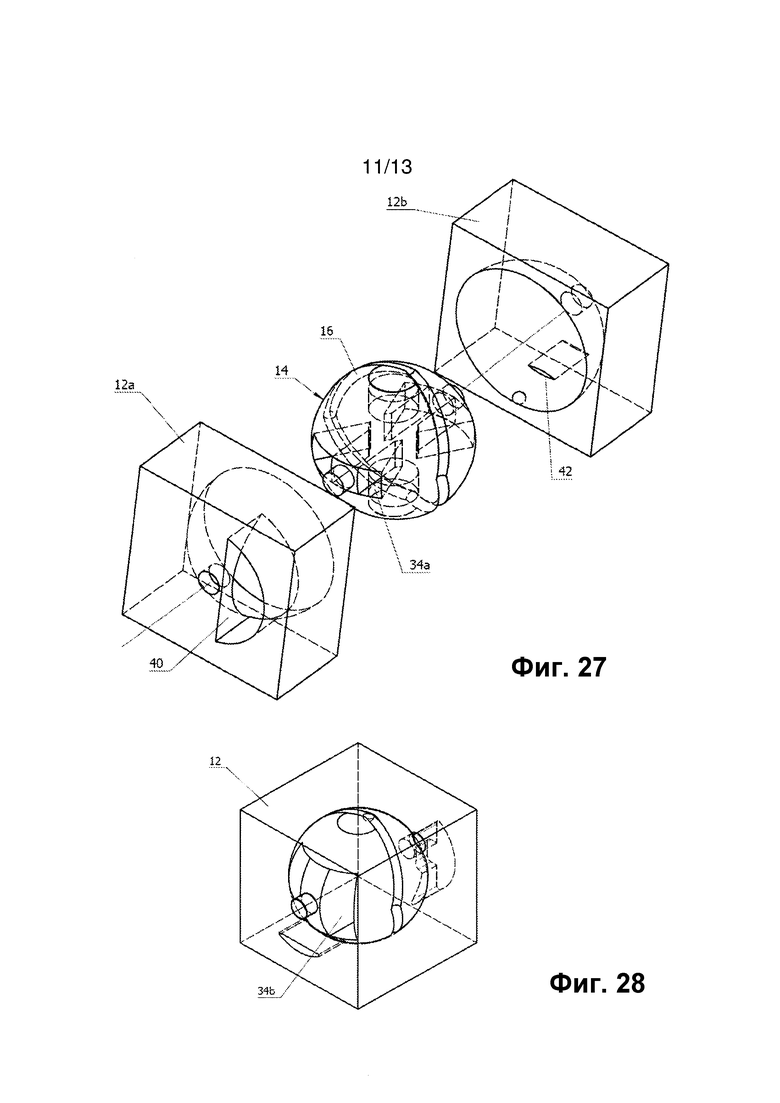
На Фигурах 27, 28 показан альтернативный пример аппарата, предусмотренного как часть двигателя внутреннего сгорания, схожего с двигателем с «двухтактным» циклом. На Фигуре 27 показан вид с пространственным разнесением деталей двигателя с одного угла. На Фигуре 28 показан «полупрозрачный» вид варианта двигателя с другого угла. Примеры с Фигур 27, 28 идентичны за исключением того, что на Фигуре 28 также проиллюстрирован поршневой элемент 22 и камера 34 сжатия с характеристическим отношением, отличающимся от показанного на Фигуре 27. Во многих отношениях узел 16 ротора в соответствии с этими примерами аналогичен раскрытым в предыдущих примерах.
Однако важное отличие состоит в том, что предусмотрен по меньшей мере один закрываемый проточный канал 80 между первой камерой 34а сжатия на одной стороне узла 16 ротора и второй камерой 34b сжатия на другой стороне узла 16 ротора. Проточный канал может содержать проточный тракт в шпинделе 20, открытый, когда ротор повернут до одного предела его поворота, и закрытый, когда ротор повернут в направлении другого предела его поворотного движения. Другое значительное отличие между примерами с Фигур 27, 28 и предыдущими примерами состоит в том, что корпус содержит только один порт на камеру 34а, 34b сжатия для передачи текучей среды между проточным каналом и соответствующей камерой 34а, 34b сжатия. Предусмотрены впускной порт 40 на одной половине корпуса 12а и выпускной порт 42 на другой половине корпуса 12b. В этом примере площадь поперечного сечения выпускного порта 42 значительно меньше площади поперечного сечения впускного порта 40.
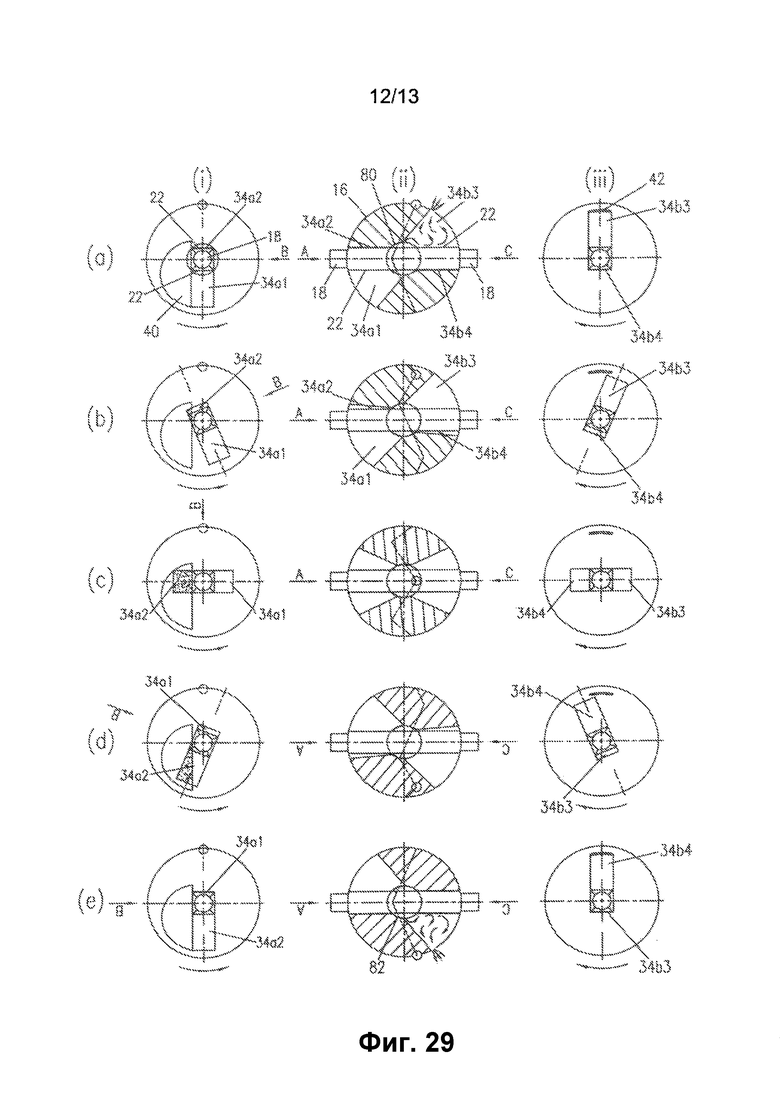
На Фигуре 29 проиллюстрировано то, как может работать цикл сгорания в примерах с Фигур 27, 28. Центральная фигура (и) в каждом ряду иллюстрирует вид в поперечном разрезе ротора 16 с установленными валом 18 и поршневым элементом. На фигуре слева (i) показан вид с торца центральной фигуры (ii). На фигуре (iii) справа показан вид с торца с противоположной стороны узла ротора.
На Фигуре 29(a) при угловом положении ноль градусов, подкамера 34а1 полностью загружена после фазы всасывания с втягиванием воздуха через впускной порт 40. Подкамера 34а2 полностью сжата и производит выпуск в подкамеру 34b3 через закрываемый проточный канал 80 между подкамерами 34а1 и 34b3. Подкамера 34b3 полностью открыта и частично совмещена с выпускным портом 42. Подкамера 34b4 содержит полностью сжатую смесь воздух-топливо и начинает свой рабочий такт (т.е. зажигание).
Топливо вводится в подкамеру 34b3 во время одного из этапов, показанных на Фигурах 29(b), (с) или (d) ниже.
На Фигуре 29(b) проиллюстрировано угловое положение 22,5 градуса. Подкамера 34а1 теперь закрыта, начинается такт сжатия. Подкамера 34а2 начинает расширение и втягивает текучую среду через впускной порт 40. Подкамера 34b3 теперь закрыта, начинается сжатие. В подкамере 34b4 смесь топливо-воздух воспламеняется и сгорает, вызывая расширение, которое вызывает относительное движение поршневого элемента 22 и ротора 16, тем самым вызывая вращение ротора 16 вокруг первой оси 30 вращения.
На Фигуре 29(c) проиллюстрирован поворот на 90 градусов. Подкамера 34а1 все еще закрыта и находится на середине события сжатия. Подкамера 34а2 находится на середине события расширения и все еще втягивает текучую среду через впускной порт 40. Подкамера 34b3 все еще закрыта и находится на середине такта сжатия. Подкамера 34b4 находится на середине рабочего такта и все еще приводится в открытое положение за счет сгорания в ней.
На Фигуре 29(d) проиллюстрировано угловое положение 157,5 градусов. Подкамера 34а1 все еще закрыта и приближается к полному сжатию. Подкамера 34а2 приближается к полному расширению и все еще производит втягивание через впускной порт 40. Подкамера 34b3 все еще закрыта и находится вблизи конца своего такта сжатия. Подкамера 34b4 все еще расширяется за счет процесса сгорания и находится вблизи конца своего рабочего такта.
На Фигуре 29(e) проиллюстрировано угловое положение 180 градусов. Подкамера 34а1 полностью сжата и производит выпуск в подкамеру 34b4 через закрываемый проточный канал 80, находящийся между ними. Подкамера 34а2 полностью загружена после фазы всасывания. Подкамера 34b3 полностью сжата и готова к началу ее такта воспламенения (рабочего такта) для обеспечения энергии для следующего поворота на 180 градусов. Подкамера 34b4 полностью открыта и в один момент совмещена с выпускным портом 42 и одновременно совмещена с трактом из подкамеры 34а1.
В точке 180 градусов задачи подкамер 34а1, 34а2 полностью изменяются на задачи подкамер 34b3 и 34b4. Между точками 180 градусов и 360 градусов вышеуказанный процесс повторяется в соответствии с изменением задач.
Угловые положения, используемые в вышеупомянутых примерах в отношении Фигур 26, 29, являются лишь неограничивающими примерами.
В примерах, где аппарат представляет собой часть аппарата для расширения текучей среды, поворотное движение вызвано расширением текучей среды внутри по меньшей мере одной камеры (камер) 34 для перемещения боковой стенки первой камеры 34а от первого поршневого элемента 22 и тем самым вызывает воздействие наконечника 52, 52' ротора на направляющий тракт 50, 50' и, таким образом, вызывает вращение ротора 16 вокруг первой оси вращения. Например, аппарат согласно настоящему раскрытию может быть предусмотрен в качестве части генерирующей системы «ниже по потоку» от источника пара (в частности, выпускных газов из паровой турбины) и может принимать пар через впускные порты 40. По мере расширения пара ротор 16 и вал 18 вращаются вокруг первой оси 30 вращения, причем вращение вала 18 используется для приведения в действие генератора или иного устройства. Расширяющаяся текучая среда может быть перемещена из камеры 34а расширения за счет расширения текучей среды в другой камере 34b расширения.
В альтернативном примере аппарат может образовывать часть реактора расширения для химической реакции, в которой используют термодинамическое расширение для приведения во вращение ротора вокруг первой оси 30 вращения для отбора мощности. В таком примере камеры 34, принимающие химические продукты, могут не иметь отверстие 36, хотя могут быть снабжены устройством впрыска для доставки химического продукта в камеру (камеры) 34. Таким образом, камеры 34 могут быть заданы как закрытые пустоты/полости внутри ротора 16. В таком примере применяемое топливо может представлять собой перекись водорода или тому подобное.
В примерах, где аппарат представляет собой аппарат с приводом от текучей среды, поворотное движение вызвано потоком текучей среды в камеру 34а для перемещения боковой стенки первой камеры 34а от первого поршневого элемента 22, что вызывает воздействие наконечника ротора на направляющий тракт и, таким образом, вызывает вращение ротора 16 вокруг первой оси 30 вращения для отбора мощности. Например, аппарат по настоящему раскрытию может быть предусмотрен как гидравлический или пневматический двигатель. В таком примере аппарат может быть выполнен с возможностью получения текучей среды через впускные порты 40. По мере протекания текучей среды ротор 16 и вал 18 вращаются вокруг первой оси вращения. Текучая среда выходит под действием силы тяжести или принудительно выводится из камеры посредством потока текучей среды в последующую камеру.
В дополнительных альтернативных примерах аппарат может образовывать часть устройства для регулирования или дозирования потока. В таком примере аппарат может быть выполнен с возможностью получения текучей среды через впускные порты 40. По мере протекания текучей среды ротор 16 и вал 18 вращаются вокруг первой оси вращения. Текучая среда принудительно выводится из камеры 34а посредством потока текучей среды в последующую камеру. Скорость вращения вала может быть измерена, отрегулирована и/или ограничена для измерения или ограничения расхода через устройство.
В дополнительном примере два таких вращательных шарнирных модуля, полностью удаленных друг от друга, могут быть соединены для принудительной передачи текучей среды между каждым из них, и могут быть выполнены с возможностью использования в качестве гидравлической передачи или гидравлического дифференциала (за счет гидравлического соединения этих модулей). В таком примере текучая среда работает в качестве среды передачи энергии для преобразования входного крутящего момента в выходной крутящий момент в другом удаленном модуле (модулях), а разность объема соединенных модулей приведет к изменению скорости вращения ротора. Эта система обеспечила бы в сущности безопасный способ получения вращательной энергии в особо опасной или взрывоопасной среде.
Хотя было раскрыто несколько примеров того, как может использоваться аппарат, настоящее раскрытие не ограничивается этими примерами, поскольку основные элементы узла ротора и такая оригинальная «вращательная шарнирная» конструкция может использоваться в иных применениях.
Простой вращательный шарнирный узел, обеспечиваемый аппаратом по настоящему раскрытию, позволяет одновременное вращение и шарнирное соединение (т.е. поворот), тем самым он может использоваться для выполнения работы и требуемых функций.
Например, он может применяться во многих приложениях, в которых требуется преобразование объемной энергии во вращательную работу или преобразование вращательной входной энергии для перемещения текучей среды или управления потоком текучей среды. Иначе говоря, устройство пригодно для преобразования изменения объема во вращательное усилие и/или преобразования вращательного усилия в изменение объема.
Таким образом, аппарат является двунаправленным и двухрежимным устройством преобразования крутящего момента/давления. Он может быть выполнен с возможностью преобразования положительного или отрицательного давления во вращательное усилие. Альтернативно, он может быть выполнен с возможностью преобразования вращательного усилия в силу сжатия или разгрузки. Таким образом, он может быть выполнен с возможностью линейного перемещения рабочей среды или перемещения рабочей среды путем сжатия.
Как раскрывалось выше, он может образовывать часть теплового двигателя, парового двигателя, измерителя расхода текучей среды (в частности, воды), гидравлического или пневматического мотора. Он также может использоваться для извлечения вращательной энергии из источника вакуума.
Аппарат может образовывать часть устройства для генерации вакуума (т.е. вакуумного насоса). Аппарат может альтернативно образовывать часть устройства для управления расширением газов из жидкого состояния в газообразное или расширением газов-хладагентов. В таком примере аппарат может быть соединен с приводимыми или управляемыми вращательными средствами, например, тормозом или мотором, которые ограничивают вращение ротора до требуемой скорости вращения, тем самым обеспечивая управляемое расширение газа/текучей среды в камерах, что может или не вызывать вращение ротора для обеспечения возможности управляемого расширения, или может вызывать слишком быстрое вращение ротора и, таким образом не достигать максимального преимущества управляемого расширения.
Поскольку он представляет собой блок объемного вытеснения, который обеспечивает до 100% уменьшения внутреннего объема за оборот, он может одновременно выполнять операции «толкать» и «тянуть» и, например, может создавать максимальный вакуум на своем входе и одновременно производить сжатый воздух на своем выходе, или работать одновременно как всасывающий насос и нагнетательный насос.
Таким образом, предложен компактный аппарат, который может быть адаптирован под использование в качестве насоса текучей среды, аппарата для перемещения текучей среды, двигателя внутреннего сгорания, устройства для расширения текучей среды или устройства с приводом от текучей среды.
Ротор 14 и корпус 12 могут быть выполнены с малым зазором между ними, что позволяет работать с постоянной смазкой и в условиях вакуума и/или устранить необходимость в контактных уплотнительных средствах между ротором 16 и корпусом 12, что минимизирует потери на трение.
Свойства узла 14 ротора таковы, что он может работать в качестве маховика, что устраняет необходимость в отдельном маховике, как это принято в других конструкциях двигателей и насосов, что способствует достижению сравнительно легкой конструкции.
Дополнительно, аппарат по настоящему раскрытию содержит только три главные внутренние движущиеся детали (вал, ротор и шпиндель), что обеспечивает простое в изготовлении и сборке устройство.
В некоторых полезных применениях вал 18 может проходить за обе стороны корпуса для соединения с силовым приводом приводного устройства и/или электрогенератора или для соединения нескольких устройств последовательно.
Аппарат по настоящему изобретению может быть изготовлен с любыми размерами в соответствии с различными требованиями по производительности и мощности, а его приводной вал с двумя выходами также способствует простому подключению множества приводов на общем магистральном валу, за счет чего увеличивается производительность, плавность хода, выходная мощность, обеспечивается резерв, или возможность обеспечения большей запрашиваемой мощности с незначительной прибавкой веса при установке второго двигателя внутреннего сгорания.
Устройство по сути имеет чрезвычайно малую инертность, что обеспечивает невысокую нагрузку и быстрый и простой запуск.
Обнаружено, что при диаметре ротора 250 мм может быть достигнут рабочий объем 4 литра за оборот (что способствует 100% снижению объема). Объем привода стремится к объему сферы, таким образом, диаметр 400 мм способствует достижению приблизительно 10 кратному перемещению ротора диаметром 250 мм, а максимально возможный рабочий объем достигает 40 литров за оборот.
Стоит обратить внимание на то, что все работы и документы, поданные одновременно или раньше настоящего описания в связи с текущей заявкой и которые доступны для публичного просмотра в совокупности сданным описанием, а также содержание всех таких работ и документов, включены в настоящее описание посредством ссылки.
Все признаки, раскрытые в настоящем описании (включая любые приложенные пункты формулы, реферат и чертежи), и/или все этапы раскрытого способа или процесса, могут быть объединены в любой комбинации, за исключением комбинаций, в которых по меньшей мере некоторые из таких признаков и/или этапов взаимоисключают друг друга.
Каждый признак, раскрытый в настоящем описании (включая любые приложенные пункты формулы, реферат и чертежи), могут быть заменены альтернативными признаками, служащими той же, эквивалентной или схожей цели, если однозначно не указано иное. Таким образом, если однозначно не указано иное, каждый раскрытый признак является лишь одним примером из общего ряда эквивалентных или схожих признаков.
Изобретение не ограничено подробностями вышеприведенного варианта (вариантов) осуществления. Изобретение распространяется на любой новый признак или любую новую комбинацию признаков, раскрытых в настоящем описании (включая любые приложенные пункты формулы, реферат и чертежи), или на любой новый этап или любую новую комбинацию этапов раскрытого способа или процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТИКУЛЯЦИОННОЕ ТЕРМОДИНАМИЧЕСКОЕ УСТРОЙСТВО | 2019 |
|
RU2752114C1 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ДАВЛЕНИЯ | 2018 |
|
RU2736237C1 |
| ГИДРО(ПНЕВМО)УСТРОЙСТВО | 2017 |
|
RU2717469C1 |
| ГИДРАВЛИЧЕСКАЯ ИЛИ ПНЕВМАТИЧЕСКАЯ ПРИВОДНАЯ СИСТЕМА, ДВИГАТЕЛЬ И НАСОС ДЛЯ НЕЕ | 2014 |
|
RU2660097C9 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ДАВЛЕНИЯ | 2017 |
|
RU2725402C1 |
| УСТРОЙСТВО ПОВЫШЕНИЯ ДАВЛЕНИЯ | 2017 |
|
RU2731871C1 |
| ДВУСТОРОННЕЕ ДЕМПФИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2608986C2 |
| ГИДРАВЛИЧЕСКИЙ НАСОС | 2016 |
|
RU2703425C2 |
| ВОЗДУХОДУВНЫЙ АППАРАТ ДЛЯ ЧАСТИЦ | 2019 |
|
RU2754055C2 |
| Гидро(пневмо)цилиндр | 2013 |
|
RU2622992C9 |
Группа изобретений относится к аппарату для вращательного перемещения и способу его эксплуатации. Аппарат (10) содержит вал (18), задающий первую ось (30) вращения и выполненный с возможностью вращения вокруг нее, шпиндель (20), задающий вторую ось (32) вращения, первый поршневой элемент (22), предусмотренный на валу (28). Элемент (22) проходит от шпинделя (20) к дистальному концу вала (18). Вал (18) проходит через шпиндель (20). Вал (18), шпиндель (20) и элемент (22) зафиксированы относительно друг друга. Ротор (16) установлен с опорой на шпинделе (20). Ротор (26) содержит первую камеру (34а). Элемент (22) проходит через камеру (34а). Ротор (16) и шпиндель (20) выполнены с возможностью вращения с валом (18) вокруг оси (30). Ротор (16) выполнен с возможностью поворота относительно шпинделя (20) вокруг оси (32) для обеспечения возможности относительного поворотного движения между ротором (16) и элементом (22) при вращении ротора (16) вокруг оси (30). Группа изобретений направлена на создание аппарата, не имеющего потребности в преобразовании с помощью кривошипа поступательного движения во вращательное. 2 н. и 20 з.п. ф-лы, 31 ил.
1. Аппарат (10), содержащий:
вал (18), задающий первую ось (30) вращения и выполненный с возможностью вращения вокруг нее;
шпиндель (20), задающий вторую ось (32) вращения, причем вал (18) проходит через шпиндель (20);
первый поршневой элемент (22), предусмотренный на валу (28), причем первый поршневой элемент (22) проходит от шпинделя (20) к дистальному концу вала (18);
отличающийся тем, что:
вал (18), шпиндель (20) и поршневой элемент (22) зафиксированы относительно друг друга;
ротор (16), установленный с опорой на шпинделе (20);
причем ротор (26) содержит первую камеру (34а),
причем первый поршневой элемент (22) проходит через первую камеру (34а);
при этом:
ротор (16) и шпиндель (20) выполнены с возможностью вращения с валом (18) вокруг первой оси (30) вращения; и
ротор (16) выполнен с возможностью поворота относительно шпинделя (20) вокруг второй оси (32) вращения
для обеспечения возможности относительного поворотного движения между ротором (16) и первым поршневым элементом (22) при вращении ротора (16) вокруг первой оси (30) вращения.
2. Аппарат (10) по п. 1, в котором
первая камера (34а) имеет первое отверстие (36); и
первый поршневой элемент (22) проходит от шпинделя (20) через первую камеру (34а) к первому отверстию (36).
3. Аппарат (10) по п. 1 или 2, в котором
шпиндель (20) расположен по существу посередине между концами вала (18).
4. Аппарат (10) по любому из пп. 1-3, в котором
первый поршневой элемент (22) проходит от одной стороны шпинделя (20) вдоль вала (18); и
второй поршневой элемент (22) проходит от другой стороны шпинделя (20) вдоль вала (18),
при этом ротор (16) содержит вторую камеру (34b)
для обеспечения возможности относительного поворотного движения между ротором (16) и вторым поршневым элементом (22) при вращении ротора (16) вокруг первой оси (30) вращения.
5. Аппарат (10) по п. 4, в котором
вторая камера (34b) имеет второе отверстие (36); и
второй поршневой элемент (22) проходит от шпинделя (20) через вторую камеру (34b) ко второму отверстию (36).
6. Аппарат (10) по любому из пп. 4 и 5, в котором между первой камерой (34а) и второй камерой (34b) предусмотрен закрываемый проточный канал (80).
7. Аппарат (10) по п. 6, в котором закрываемый проточный канал (80) содержит проточный тракт в шпинделе (20), открытый, когда ротор (16) повернут до одного предела его поворота, и закрытый при повороте ротора (16) в направлении другого предела его поворота.
8. Аппарат (10) по любому из предшествующих пунктов, в котором:
вторая ось (32) вращения по существу перпендикулярна первой оси (30) вращения.
9. Аппарат (10) по любому из предшествующих пунктов, дополнительно содержащий:
корпус (12) со стенкой (24), задающей полость (26);
причем ротор (16) выполнен с возможностью вращения и поворота внутри полости (26);
и расположен относительно корпуса (12) так, чтобы между ротором (16) и большей частью стенки (24) поддерживался малый зазор.
10. Аппарат (10) по п. 9, в котором корпус (12) дополнительно содержит опорную конструкцию (44) для поддержания вала (18).
11. Аппарат (10) по п. 9 или 10, в котором:
первый поршневой элемент (22) имеет такие размеры, что он оканчивается вблизи стенки (24) корпуса (12), причем между концом поршневого элемента (22) и стенкой (24) корпуса поддерживается малый зазор.
12. Аппарат (10) по любому из пп. 9-11, в котором:
корпус (12) дополнительно содержит по меньшей мере один порт (40, 42) на камеру (34а, 34b) для передачи текучей среды между проточным каналом и соответствующей камерой (34а, 34b).
13. Аппарат (10) по любому из пп. 9-11, в котором:
для каждой камеры (34а, 34b)
корпус (12) дополнительно содержит впускной порт (40) для подачи текучей среды в камеру (34а, 34b); и
выпускной порт (42) для выведения текучей среды из камеры (34а, 34b).
14. Аппарат (10) по п. 12 или 13, в котором порты (40, 42) имеют такие размеры и расположены на корпусе (12) так, что:
в первом множестве относительных положений портов (40, 42) и соответствующих отверстий (36) ротора порты (40, 42) и отверстия (36) ротора не совмещены, так что отверстия (36) полностью закрыты стенкой (24) корпуса (12) для предотвращения потока текучей среды между камерой (34а, 34b) и портом (40, 42); и
во втором множестве относительных положений портов (40, 42) и соответствующих отверстий (36) ротора отверстия (36) по меньшей мере частично совмещены с портами (40, 42), так что отверстия (36) по меньшей мере частично открыты для пропускания потока текучей среды между камерой (34а, 34b) и портом (40, 42).
15. Аппарат (10) по любому из предшествующих пунктов, дополнительно содержащий:
поворотный привод, выполненный с возможностью поворота ротора (16) вокруг шпинделя (20).
16. Аппарат (10) по п. 15, в котором поворотный привод содержит:
первый направляющий элемент (50, 52') на роторе (16); и
второй направляющий элемент (50, 52') на корпусе (12);
причем первый направляющий элемент по форме комплементарен второму направляющему элементу; при этом
один из первого и второго направляющих элементов определяет тракт (50, 50'), ограниченный другим из первого и второго направляющих элементов (52, 52');
что вызывает поворот ротора (16) вокруг шпинделя (20).
17. Аппарат (10) по п. 16, в котором:
направляющий тракт (50, 50') определяет тракт вокруг первой окружности ротора (16) или корпуса (12),
направляющий тракт (50, 50') содержит по меньшей мере:
первый изгиб (70), который направляет указанный тракт в сторону от первой стороны первой окружности и затем обратно ко второй стороне первой окружности; и
второй изгиб (72), который направляет указанный тракт в сторону от второй стороны первой окружности и затем обратно к первой стороне первой окружности.
18. Аппарат (10) по любому из предшествующих пунктов, в котором камера (34а, 34b) выполнена сообщающейся по текучей среде с системой подачи топлива.
19. Аппарат (10) по любому из предшествующих пунктов, в котором камера (34а, 34b) выполнена сообщающейся по текучей среде с устройством воспламенения топлива.
20. Аппарат (10) по любому из пп. 1-19, в котором
первая камера (34а) приспособлена для сжатия, и/или перемещения, и/или протекания, и/или расширения текучей среды.
21. Аппарат (10) по любому из пп. 4-20, в котором
вторая камера (34b) приспособлена для сжатия, и/или перемещения, и/или протекания, и/или расширения текучей среды.
22. Способ эксплуатации аппарата,
причем аппарат содержит:
вал (18), задающий первую ось (30) вращения и выполненный с возможностью вращения вокруг нее;
шпиндель (20), задающий вторую ось (32) вращения, причем вал (18) проходит через шпиндель (20);
первый поршневой элемент (22), предусмотренный на валу (18); и
причем вал (18), шпиндель (20) и поршневой элемент (22) зафиксированы относительно друг друга;
причем первый поршневой элемент (22) выполнен с возможностью вращения вокруг первой оси (30) вращения;
ротор (16), содержащий первую камеру (34а) и выполненный с возможностью поворота вокруг второй оси (32) вращения,
причем первый поршневой элемент (22) проходит через первую камеру (34а);
при этом во время эксплуатации:
вращают ротор (16) и первый поршневой элемент (22) вокруг первой оси (30) вращения; и
поворачивают ротор (16) вокруг второй оси (32) вращения,
так чтобы обеспечить относительное поворотное движение между ротором (16) и первым поршневым элементом (22),
за счет чего изменяют объем первой камеры,
причем изменение объема камеры связано с вращением ротора (16) вокруг первой оси (30) вращения.
| US 1967167 A, 17.07.1934 | |||
| US 6325038 B1, 04.12.2001 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАНЕСЕНИЯ АРОМАТИЗАТОРА И МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ СИГАРЕТ, СНАБЖЕННАЯ ЭТИМ УСТРОЙСТВОМ | 2004 |
|
RU2295266C2 |
| CN 104775899 A, 15.07.2015 | |||
| МАШИНА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ | 1990 |
|
RU2080452C1 |

