Уровень техники
[0001] Службы позиционирования в транспортном средстве направлены на определение местоположений мобильных устройств внутри или относительно транспортного средства. Позиционирование в транспортном средстве может быть использовано, чтобы предоставлять персонализированный контент конкретным мобильным устройствам и/или их местоположениям внутри транспортного средства. Например, первое мобильное устройство может предоставлять потоковое видео, в то время как второе устройство предоставляет онлайновую многопользовательскую игру. Однако, важно помогать препятствовать отвлечению оператора транспортного средства контентом мобильного устройства.
[0002] Технологии, основанные на индикации уровня принимаемого сигнала (RSSI) от беспроводных устройств связи, например, Wi-Fi и Bluetooth беспроводных точек доступа, предоставляют ограниченную позиционную достоверность. Сложности в окружениях транспортных средств вынуждают радиоволны распространяться непрогнозируемыми путями, ограничивая точность систем позиционирования на основе RSSI. Ультразвуковые технологии (US), которые передают акустические волны микрофонам, работают на более низких частотах, чем системы на основе Wi-Fi, и являются чувствительными к шумовым помехам дороги.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления настоящего изобретения обеспечена система, содержащая мобильное вычислительное устройство, которое включает в себя процессор и память, причем память хранит программные инструкции, исполняемые процессором, чтобы: обнаруживать идентификатор в каждом из двух или более асинхронных источников света, обнаруженных посредством датчика света, причем идентификатор включает в себя позицию источника света; и с использованием, по меньшей мере, системы координат, имеющей начало отсчета в датчике света, и позиции источника света, определять местоположение мобильного устройства.
В дополнительном варианте осуществления обеспечена система, в которой мобильное устройство дополнительно запрограммировано, чтобы сообщать местоположение мобильного устройства компьютеру транспортного средства.
В еще одном дополнительном варианте осуществления обеспечена система, дополнительно содержащая компьютер транспортного средства, причем компьютер транспортного средства включает в себя процессор и память, причем память компьютера транспортного средства хранит инструкции, чтобы сообщать разрешение использовать систему транспортного средства мобильному устройству.
В еще одном дополнительном варианте осуществления обеспечена система, в которой система транспортного средства является информационно-развлекательной системой.
В еще одном дополнительном варианте осуществления обеспечена система, в которой асинхронный источник света содержит светоизлучающий диод (LED).
В еще одном дополнительном варианте осуществления обеспечена система, в которой LED является многоцветным светоизлучающим диодом.
В еще одном дополнительном варианте осуществления обеспечена система, дополнительно содержащая память мобильного устройства, которая хранит карту салона транспортного средства, при этом мобильное устройство дополнительно запрограммировано, чтобы определять местоположение мобильного устройства согласно области, указанной посредством карты салона транспортного средства.
В еще одном дополнительном варианте осуществления обеспечена система, в которой карта включает в себя позиции одного или более асинхронных источников света в транспортном средстве.
В еще одном дополнительном варианте осуществления обеспечена система, дополнительно содержащая компьютер транспортного средства, причем компьютер транспортного средства включает в себя процессор и память, причем память компьютера транспортного средства хранит инструкции, чтобы инструктировать модуляцию каждого из одного или более источников света, чтобы формировать идентификатор для соответствующего источника света.
В еще одном дополнительном варианте осуществления обеспечена система, в которой датчик света является датчиком на комплементарном металлоксидном полупроводнике (CMOS), и мобильное устройство дополнительно запрограммировано, чтобы определять соответствующие расстояния в пикселах для одного или более источников света от датчика.
В другом варианте осуществления настоящего изобретения обеспечен способ, содержащий этапы, на которых: обнаруживают идентификатор в каждом из одного или более асинхронных источников света, обнаруженных посредством датчика света, причем идентификатор включает в себя позицию источника света; и используют, по меньшей мере, систему координат, имеющую начало отсчета в датчике света, и позицию источника света, чтобы определять местоположение мобильного устройства.
В дополнительном варианте осуществления обеспечен способ, в котором асинхронный источник света содержит светоизлучающий диод (LED).
В еще одном дополнительном варианте осуществления обеспечен способ, в котором LED является многоцветным светоизлучающим диодом.
В еще одном дополнительном варианте осуществления обеспечен способ, дополнительно содержащий этап, на котором сообщают местоположение мобильного устройства компьютеру транспортного средства.
В еще одном дополнительном варианте осуществления обеспечен способ, дополнительно содержащий этап, на котором принимают разрешение использовать систему транспортного средства на основе определенного местоположения.
В еще одном дополнительном варианте осуществления обеспечен способ, в котором система транспортного средства является информационно-развлекательной системой.
В еще одном дополнительном варианте осуществления обеспечен способ, дополнительно содержащий этап, на котором сохраняют карту салона транспортного средства, при этом мобильное устройство дополнительно программируется, чтобы определять местоположение мобильного устройства согласно области, указанной посредством карты салона транспортного средства.
В еще одном дополнительном варианте осуществления обеспечен способ, в котором карта включает в себя позиции одного или более асинхронных источников света в транспортном средстве.
В еще одном дополнительном варианте осуществления обеспечен способ, дополнительно содержащий этап, на котором инструктируют модуляцию каждого из одного или более источников света, чтобы формировать идентификатор для соответствующего источника света.
В еще одном дополнительном варианте осуществления обеспечен способ, в котором датчик света является датчиком на комплементарном металлооксидном полупроводнике (CMOS), причем способ дополнительно содержит этап, на котором определяют соответствующие расстояния в пикселах для одного или более источников света от датчика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
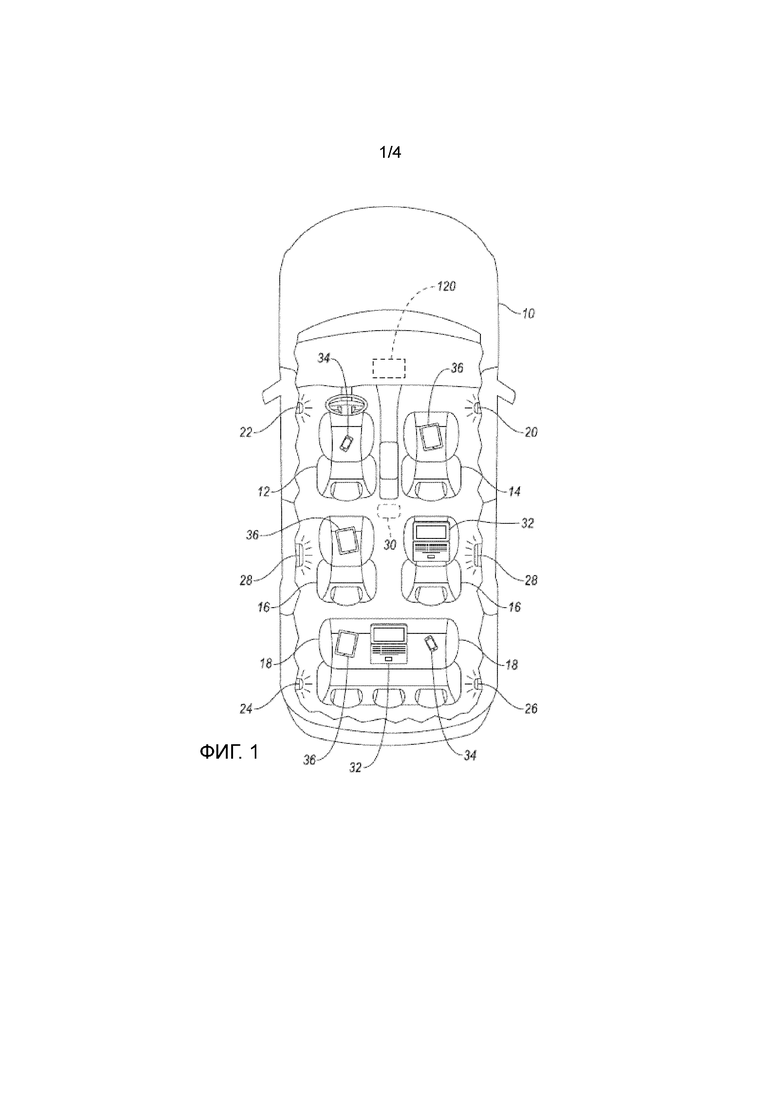
[0003] Фиг. 1 иллюстрирует примерное транспортное средство с мобильными устройствами в различных позициях повсюду в транспортном средстве, принимающими свет от множества LED-источников света.
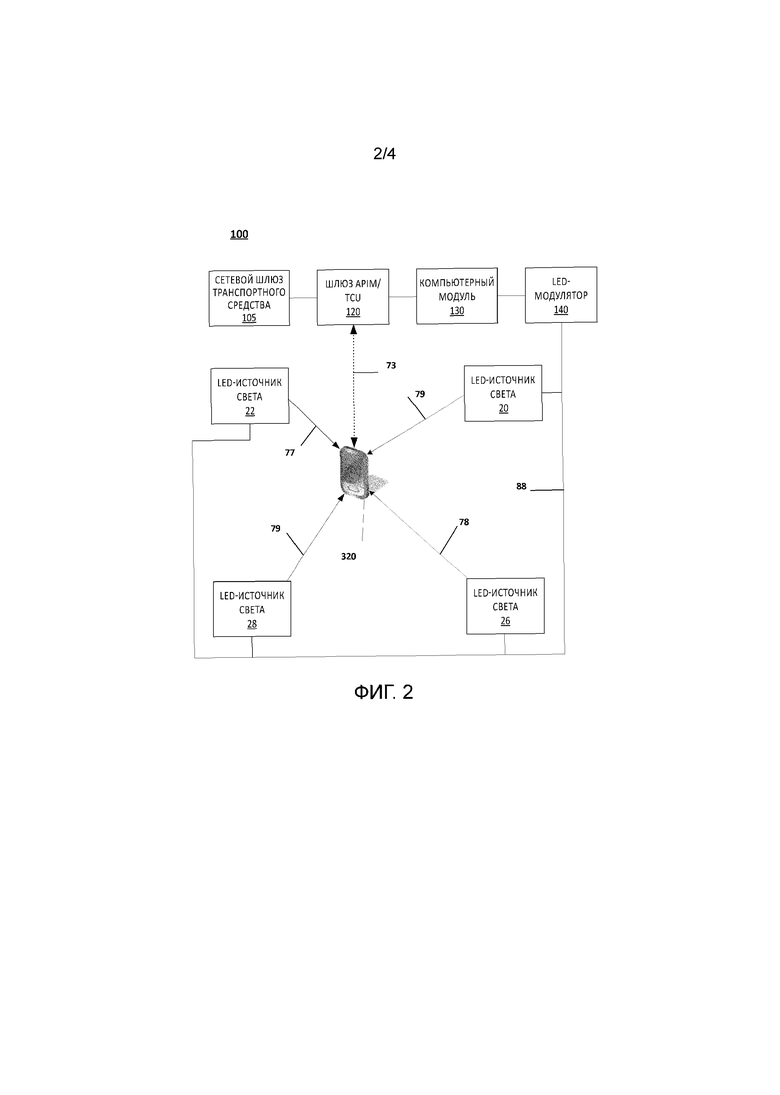
[0004] Фиг. 2 иллюстрирует компоненты примерной системы доставки контента в транспортном средстве на основе светового позиционирования устройства.
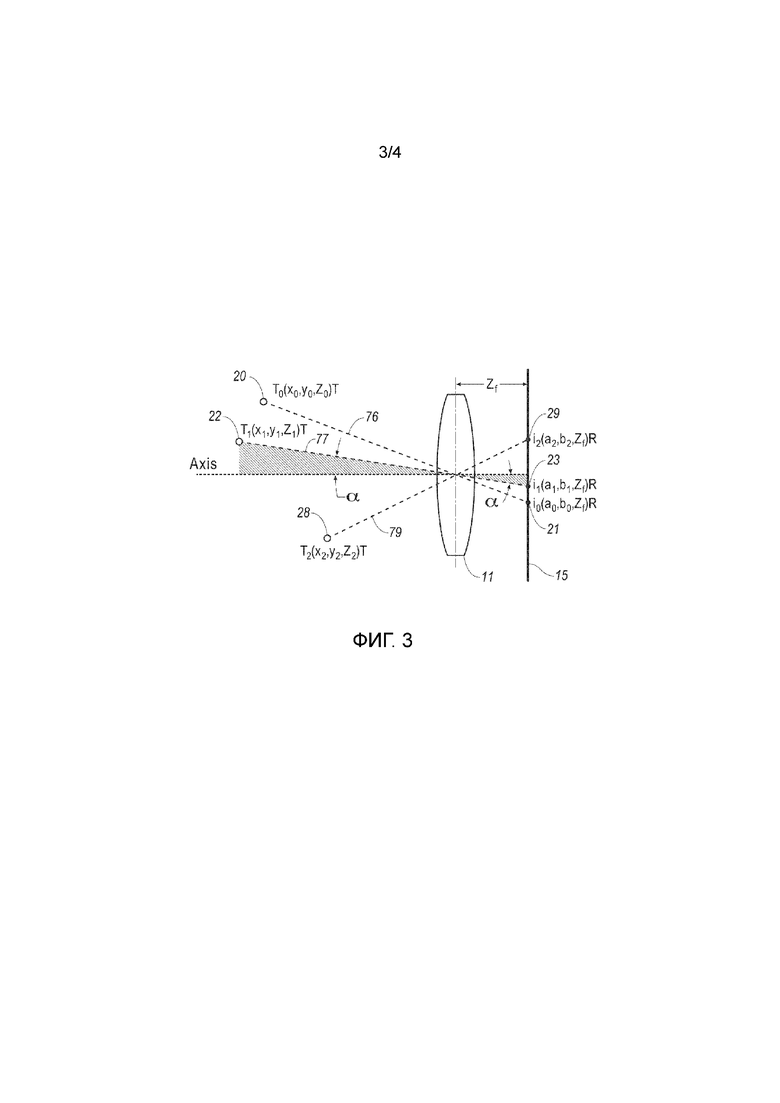
[0005] Фиг. 3 иллюстрирует примерное световое позиционирование.
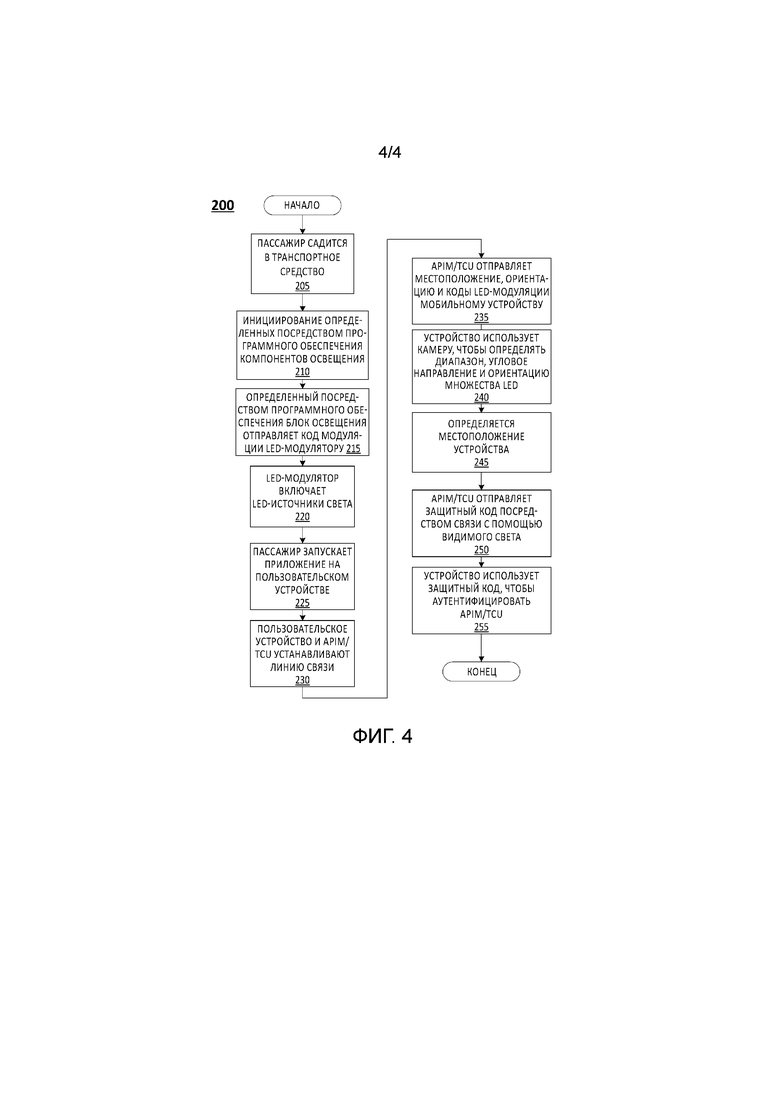
[0006] Фиг. 4 - это блок-схема последовательности операций примерного процесса системы доставки контента в транспортном средстве на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0007] Со ссылкой на чертежи, на которых аналогичные номера указывают аналогичные части повсюду на нескольких видах, фиг. 1 иллюстрирует множество мобильных устройств в транспортном средстве 10. Например, мобильные устройства могут включать в себя портативный компьютер 32, мобильный телефон 34, планшет 36 или любое небольшое вычислительное устройство, например, типично устройство, достаточно небольшое, чтобы быть пригодным для носки, переносимым или карманным (иногда называется карманным компьютером или просто "наладонником"), типично имеющим экран отображения с клавиатурой ввода касанием и/или другим механизмом(ами) ввода. Мобильные устройства могут эксплуатироваться оператором, который может занимать сиденье, которое может быть включено в транспортное средство 10, такое как водительское сиденье 12, пассажирское сиденье 14, сиденье 16 среднего ряда или сиденье 18 третьего ряда. Множество асинхронных источников света, таких как светоизлучающие диоды (LED), могут быть расположены повсюду в транспортном средстве 10. Например, правый передний LED 20, левый передний LED 22, левый задний LED 24, правый задний LED 26, боковой LED 28 и потолочный LED 30 могут быть расположены в транспортном средстве 10.
[0008] Также обращаясь теперь к фиг. 2, вычислительное устройство, имеющее процессор и память, например, телематический блок, к примеру, который является известным, например, модуль протокольного интерфейса вспомогательного устройства/блок 120 телематического управления (APIM/TCU), предоставляет возможность мобильным устройствам, таким как мобильный телефон 34, соединяться с телекоммуникационным устройством (не показано). Мобильный телефон может соединяться с телекоммуникационным провайдером через развлекательную систему транспортного средства 10 (не показана) и с сетью, такой как Интернет, через протоколы связи APIM/TCU 120, такие как протоколы Wi-Fi, протоколы Bluetooth или любые другие протоколы связи ближнего радиуса действия (NFC), которые используют технологию беспроводной связи для обмена данными на коротких расстояниях.
[0009] Множество LED предоставляют возможность формирования эффектов окружающего освещения при посадке и во время вождения транспортного средства. Например, три цветных LED могут управляться, чтобы производить теоретически бесконечное число цветов и свечений, которые добавляются к общему освещению и атмосфере транспортного средства. Характерной особенностью множества LED является то, что они могут выключаться и включаться с частотами, которые не могут быть восприняты человеческим глазом. Например, рабочий цикл (отношение включения к выключению) напряжения, подаваемого к LED, может быть широтно-импульсно модулированным (PWM) с высоким значением частоты. PWM является известной технологией, чтобы кодировать сообщение в пульсирующий свет, излучаемый посредством LED. Следовательно, возможно сообщать информацию в видимом световом спектре с использованием множества LED. Обмен данными с помощью видимого света (VLC) предоставляет возможность высокоскоростных передач данных с помощью LED в качестве передатчика, подобно радиочастотному передатчику. LED-модуляция может включать в себя автоматическое включение/выключение (OOK), квадратурную амплитудную модуляцию (QAM), цифровую многоканальную тональную модуляцию/мультиплексирование с ортогональным делением частот (DMT/OFDM), протоколы Ассоциации передачи данных по инфракрасной технологии (IrDA) и другие способы модуляций, аналогично технологиям радиочастотной модуляции.
[0010] Когда находится в транспортном средстве 10 и посредством использования своего мобильного телефона 34, пассажир, т.е., пользователь, может соединять мобильный телефон 34 через сетевой интерфейс (известный элемент, непоказанный для простоты иллюстрации) мобильного телефона 34 с APIM/TCU-сервером транспортного средства 10. После соединения пользователь может получать операционные данные транспортного средства (например, скорость, уровень топлива, тревожные сигналы или предупреждения, связанные с компонентами транспортного средства, и т.д.), дорожные карты, управлять позицией своего сиденья, изменять станции на радиоприемнике, включать обогреватель сиденья, получать отображение на ветровом стекле скорости и различной информации датчиков или регулировать массажную подушку в сиденье, если перечислять несколько из возможностей и/или функций мобильного телефона 34, когда он связан с транспортным средством 10.
[0011] Однако, не всегда желательно разрешать всем пассажирам транспортного средства задействовать все функциональные возможности и/или функции транспортного средства 10. Например, родитель может не хотеть, чтобы ребенок на сиденье 18 третьего ряда смотрел фильмы на планшете 36. Родитель может конфигурировать APIM/TCU 120, чтобы не предоставлять возможность потоковой передачи фильмов пассажиру сиденья 18 третьего ряда. Дополнительно, APIM/TCU 120 может быть сконфигурирован, чтобы не предоставлять каким-либо устройствам на водительском сиденье 12 возможность потоковой передачи видео мобильному телефону 34 водителя, когда связан с APIM/TCU 120, пока транспортное средство находится в эксплуатации, поскольку видео может вероятно отвлекать водителя.
Камеры мобильного устройства
[0012] Камера в мобильном телефоне 34, более конкретно, датчик камеры на комплементарном металлооксидном полупроводнике (CMOS), может быть использован, чтобы определять позицию мобильного телефона 34 в транспортном средстве. Например, водитель имеет мобильный телефон 34 с камерой в своем владении, использование технологии оптического угла падения (AoA) (обсуждаемой позже) предоставляет возможность системе определения местоположения мобильного телефона определять, что мобильный телефон 34 находится в области водительского сиденья 12.
[0013] Дополнительно, мобильный телефон 34 может использовать строковый фотозатвор, чтобы захватывать изображения на CMOS-датчике. Строковый фотозатвор является способом захвата изображения, в котором неподвижное изображение захватывается не посредством получения моментального снимка всей сцены в единственный момент времени, а скорее посредством быстрого сканирования сцены, либо вертикально, либо горизонтально. Другими словами, не все части изображения сцены записываются точно в одно и то же мгновение. Преимуществом этого способа является то, что датчик изображения может непрерывно собирать фотоны во время процесса захвата, таким образом, эффективно увеличивая чувствительность. Строковый фотозатвор также создает предсказуемые искажения, называемые "цветными окаймлениями контуров", вызванные быстрыми вспышками света. Цветные окаймления контуров предоставляют возможность улучшенного декодирования сложных модуляций, передаваемых посредством множества LED.
[0014] Мобильный телефон 34 может включать в себя акселерометр, чтобы получать ориентацию мобильного телефона 34. Например, переключение между портретным и ландшафтным режимами. Мобильный телефон 34 может включать в себя компас на твердотельных элементах, также известный как магнетометр, который может также определять ориентацию мобильного телефона 34. Магнетометр на твердотельных элементах обычно создается из двух или трех датчиков магнитного поля, которые отправляют данные мобильному телефону 34, предоставляя возможность мобильному телефону 34 вычислять ориентацию относительно компасного румба.
Определение местоположения мобильного устройства
[0015] Обращаясь снова к фиг. 2, иллюстрируется примерная конфигурация системы 100 определения местоположения мобильного устройства. Сетевой шлюз 105 транспортного средства соединяется с возможностью обмена данными со шлюзом 120 APIM/TCU, который соединяется с возможностью обмена данными с компьютером 130. Компьютер 130 соединяется с возможностью обмена данными с LED-модулятором 140. LED-модулятор 140 соединяется с возможностью обмена данными с правым передним LED 20, левым передним LED 22, правым задним LED 26 и боковым LED 28 через LED-шину 88 (которая может быть частью информационной шины транспортного средства или т.п.). Мобильный телефон 34, который находится в близком местоположении к множеству LED и APIM/TCU 120, соединяется с возможностью обмена данными с APIM/TCU 120 через канал 73 беспроводной связи, такой как Wi-Fi, Bluetooth, связь ближнего радиуса действия (NFC) или любая другая радиочастотная технология связи. Кроме того, мобильный телефон 34 соединяется с возможностью обмена данными с множеством LED, т.е., мобильный телефон 34 может принимать модулированные световые сигналы 77 связи от вышеупомянутых LED.
[0016] Сетевой шлюз 105 транспортного средства отделяет сеть управления транспортного средства 10 (не показана) от информационно-развлекательной сети транспортного средства 10. Термин "сеть управления", когда используется в данном документе, ссылается на информационную шину транспортного средства 10 или т.п., которая, как известно, предоставляет доступ к управлению различными действиями транспортного средства 10. Например, через один или более электронных блоков управления (ECU) в транспортном средстве, как известно, возможно управлять дроссельной заслонкой транспортного средства 10, торможением, рулением, управлять климатом, внутренними и внешними источниками света, и т.д. Информационно-развлекательная сеть, с другой стороны, как известно, предоставляет возможность доступа к различному аудио-визуальному мультимедийному контенту, такому как аудиокниги, фильмы, радиостанции, и т.д. Сетевой шлюз 105 транспортного средства является интерфейсом межсетевого экрана, таким, который известен, чтобы защищать сеть управления от сетевых атак, например, через доступ к информационно-развлекательной сети. APIM/TCU 120 предоставляет интерфейс для мобильной связи. Например, LTE, GSM, GPRS, Wi-Fi, Bluetooth или NFC. APIM/TCU 120 может также содержать гибридные приемники глобальной навигационной спутниковой системы (GNSS) транспортного средства 10, которые могут принимать сигналы системы глобального позиционирования США (GPS), российской Глобальной навигационной спутниковой системы (GLONASS), систем Galileo GPS Европейского Союза или китайской Beidou GPS, которые обычно используются в автомобилях. APIM/TCU 120 может содержать электронный блок обработки, такой как микроконтроллер или некоторая разновидность микропроцессора, вместе с памятью, чтобы хранить исполняемый код и данные.
[0017] Правый передний LED 20, левый передний LED 22, правый задний LED 26 и боковой LED 28 находятся в предварительно определенных фиксированных местоположениях, т.е., позициях повсюду в транспортном средстве 10. Компьютер 130 использует позицию LED, чтобы определять уникальный идентификатор для каждого из множества LED. Например, для позиции, представляющей правый передний LED 22, компьютер 130 включает в себя программирование, чтобы программировать LED-модулятор 140 с таким сигналом идентификатора, который является уникальным или по существу уникальным кодом модуляции. Идентифицирующий сигнал, соответствующий идентификатору LED, модулируется с частотой модуляции в каждом LED и отправляется в качестве широковещательного идентификационного сигнала в излучаемой LED световой волне 77. Другими словами, каждый LED будет выключаться и включаться (т.е., модулироваться) со своим собственным уникальным или по существу уникальным шаблоном, указывающим позицию каждого LED. Например, компьютер 130 может включать в себя программирование, чтобы программировать LED-модулятор 140 так, что левый передний LED 22 использует широтно-импульсную модуляцию (PCM), чтобы цифровым образом передавать модулированный световой сигнал по излучаемой LED световой волне 77, идентифицирующей, что источник света является источником левого переднего LED 22 в левой передней части транспортного средства 10.
[0018] Фиг. 3 иллюстрирует систему 100, определяющую местоположение мобильного телефона 34 в транспортном средстве 10. Система 100 может использовать принцип локализации с помощью оптического угла падения (AoA) на основе камеры с двояковыпуклой линзой 11 в мобильном телефоне 34 через прикладную программу (которая обычно называется "приложением"), которая работает на мобильном телефоне 34 и связывается с APIM/TCU 120. Отличительной особенностью двояковыпуклой линзы 11 является то, что луч света, который проходит через центр линзы 11, не преломляется. Это предоставляет возможность AoA-технологии определять относительное местоположение мобильного телефона 34 по отношению к множеству LED. Например, камера мобильного телефона 34 принимает излучаемую LED световую волну 77 от левого переднего LED 22, когда камера мобильного телефона 34 находится поблизости от LED 22. Излучаемая LED 22 световая волна 77 проходит через центр линзы 11, и прямолинейная проекция световой волны левого переднего LED 22 принимается CMOS-датчиком 15 камеры телефона 34. Левый передний LED 22, с координатами в трехмерной декартовой системе координат, спроецированной на салон транспортного средства 10 с началом отсчета в центре линзы 11, (x1, y1, z1)T имеет изображение i1 21 с координатами (a1, b1, Z1)Zf на CMOS-датчике 15, результат излучаемой LED 22 световой волны 77 проходит через центр линзы 11. Zf является расстоянием, как правило, измеряемым числом пикселей, от линзы 11 до CMOS-датчика 15.
[0019] По геометрии аналогичных треугольников можно определять коэффициент K0 масштабирования для левого переднего LED 22. Коэффициент масштабирования, имеющий первоначально неизвестное значение, которое определяется, как описано ниже, может быть использован, чтобы описывать местоположение левого переднего LED 22 (u0, v0, w0)R в системе координат CMOS-датчика 15, например, системе координат, упомянутой выше, как: u0=K0 × a0, v0=K0 × b0 и w0=K0 × Zf.. Поскольку позиция, например, координаты, LED 22 является известной, расстояние между LED 20, 22 и линзой 11 может быть выражено. Набор квадратных уравнений может быть записан, чтобы выражать эти расстояния, в которых единственными оставшимися неизвестными являются коэффициенты K0, K1, …, Kn масштабирования. Например, предположим, что три LED, правый передний LED 20 (T0), левый передний LED 22 (T1) и боковой LED 28 (T2) находятся в местоположениях (x0, y0, z0)T, (x1, y1, z1)T1 и (x2, y2, z2)T2, соответственно. Квадрат расстояния между T0 и T1, обозначенный d20,1, может быть выражен в одной из двух областей определения, одна является расстоянием, измеренным в пикселах, а другая является расстоянием, измеренным с помощью физического измерения, такого как дюймы, миллиметры и т.д. В любом случае, как изложено выше, координаты могут быть проецированы на салон транспортного средства 10, например, границы координат могут быть указаны для областей в транспортном средстве 10, таких как область водителя, область переднего пассажира, область заднего пассажира (которая может быть дополнительно разделена на левую, правую, среднюю и т.д.), и т.д. И в любой области определения координаты могут быть использованы следующим образом:
d20,1=(u0 - u1)2+(v0 - v1)2+(w0 - w1)2 Уравнение 1
= (K0a0 - K1a1)2+(K0b0 - K1b1)2+Z2f (K0 - K1)2 Уравнение 2
= K20 | Oi0 |2+K21 | Oi1 |2 - 2K0K1( Oi0 · Oi1) Уравнение 3
= (x0 - x1)2+(y0 - y1)2+(z0 - z1)2, Уравнение 4
где Oi 0 и Oi 1 являются векторами из центра линзы 11 к изображениям i0 (a0, b0, Z0)Zf 21 и i1 (a1, b1, Z1)Zf 23, соответственно. Следовательно, с тремя известными LED-источниками света, существуют три неизвестных переменных K0, K1 и K2, которые могут быть определены с помощью известных процедур для решения квадратных уравнений, вычисляющих местоположение LED 20, 22 относительно мобильного устройства 34.
[0020] Мобильный телефон 34 и/или APIM/TCU 120 может затем дополнительно определять область (например, сиденье) транспортного средства 10, в котором находится мобильный телефон 34. Мобильный телефон 34 может выгружать свою относительную позицию в APIM/TCU 120, и APIM/TCU будет затем вычислять конкретное местоположение мобильного телефона 34. В эксплуатации мобильный телефон 34 может принимать карту позиций от APIM/TCU 120, которая может помогать мобильному телефону 34 с определением его позиционирования. Дополнительно, карта позиций может включать в себя план сидений транспортного средства 10, который содержит местоположение сидений.
[0021] Следует отметить, что частота модуляции LED 20, 22 и т.д. должна быть выбрана такой, при которой человек не будет обнаруживать какую-либо пульсацию или мерцание LED-источника света. Например, человеческий глаз не может обнаруживать свет, повторяющий цикл включения-выключения, когда свет повторяется циклически свыше 200 Гц. Дополнительно, AoA-технология, описанная выше, может быть использована при низкой интенсивности светового потока, к примеру, при вождении в ночное время, когда LED выключены или сделаны тусклыми, когда требуется слабое освещение.
[0022] В примерном варианте осуществления водитель может запускать приложение посредством своего мобильного телефона 34, которое будет инструктировать дисплею на мобильном телефоне 34 водителя быть погашенным и/или затемненным. Приложение будет предоставлять возможность пользователю в транспортном средстве 10 управлять мобильным телефоном 34 посредством экрана касания, кнопки на рулевом колесе, традиционных органов управления транспортного средства 10, таких как консоль транспортного средства с экраном касания, жесты, индикация на лобовом стекле, набор голосовых команд и любые другие HMI-устройства, доступные APIM/TCU 120 по системной шине транспортного средства 10.
[0023] LED, используемые в транспортном средстве 10, могут быть одноцветным LED и/или многоцветным (обычно трехцветным) LED. Как обсуждалось выше, многоцветный LED предоставляет возможность создания множества цветов с помощью различных сочетаний и интенсивностей красного, зеленого и синего. Следовательно, в варианте осуществления, каждый цвет трехцветного LED может быть уникально модулирован, чтобы иметь три отдельных канала связи от одного LED-источника. Например, многоцветный LED может иметь информацию о местоположении, транслируемую по красному фрагменту, зеленый фрагмент может реагировать на запросы мобильного телефона, а синий может быть модулирован, чтобы транслировать новости или материалы оперативной сводки новостей (RSS).
[0024] Теперь со ссылкой на фиг. 4 показана блок-схема последовательности операций примерного процесса 200 системы 100 определения местоположения мобильного устройства. Процесс начинается, когда пассажир садится в транспортное средство 10, на этапе 205. Далее, на этапе 210, инициируется LED-освещение, т.е., компьютер 130 и LED-модулятор 140 включают питание, и компьютер 130 начинает исполнять компьютерный код, как описано выше, чтобы формировать и предоставлять инструкции модулятору 140. На следующем этапе 215 компьютер 130 отправляет уникальные или по существу уникальные коды модуляции LED для каждого LED-источника света в транспортном средстве 10 LED-модулятору 140. В этот момент, на этапе 220, LED-модулятор 140 затем модулирует каждый LED 20, 22, 24, 26 и/или 28 и т.д. согласно уникальному или по существу уникальному шаблону LED-модуляции, как описано выше, иногда называемому световым кодом.
[0025] Далее, на этапе 225, пассажир транспортного средства 10 запускает приложение определения местоположения на своем мобильном устройстве. Например, пассажир постукивает по экрану дисплея мобильного устройства 34, чтобы запускать приложение для определения местоположения на мобильном устройстве 34. Далее, на этапе 230, приложение для определения местоположения устройства 34 затем соединяется с APIM/TCU 120. Например, мобильное устройство 34 может соединяться с APIM/TCU 120 через Wi-Fi, Bluetooth, NFC или любые другие протоколы радиочастотной связи.
[0026] Далее, на этапе 235, APIM/TCU 120 отправляет местоположение, ориентацию и коды модуляции LED мобильному устройству 34. Мобильное устройство 34 может затем использовать свою камеру, чтобы определять диапазон, угол направления и ориентацию LED-источников света на этапе 240, например, определять позицию устройства 34 в трехмерной системе координат, спроецированной на салон транспортного средства 10, как описано выше. Далее, на этапе 245, местоположение устройства может быть определено с помощью обсужденного выше способа или любого другого алгоритма определения местоположения.
[0027] После того как местоположение устройства 34 определено мобильным устройством 34 и/или APIM/TCU 120, или альтернативно или дополнительно, другим устройством, например, электронным блоком управления, транспортного средства 10, APIM/TCU 120 отправляет защитный код мобильному устройству 34 через множество LED на этапе 245. Защитный код может быть кодом подтверждения подлинности авторизации, т.е., разрешением, авторизующим доступ мобильного устройства 34 к одному или более конкретным уровням или типам услуг системы 100 транспортного средства 10. Например, после того как система 100 определила, что мобильный телефон 34 находится в позиции сиденья 16 среднего ряда, система 100 может отправлять код подтверждения подлинности авторизации, разрешающий мобильному телефону 34 просматривать фильмы. В другом примере, если мобильный телефон 34 находится в позиции водительского сиденья 12, код подтверждения подлинности авторизации может ограничивать мобильный телефон 34 от просмотра фильмов с помощью системы 100 транспортного средства 10.
[0028] В еще одном примере защитный код может быть кодом шифрования, предоставляющим возможность мобильному телефону 34 и системе 100 устанавливать зашифрованную линию передачи данных между мобильным телефоном 34 и APIM/TCU 120. Обмен ключами шифрования (также известный как "установка ключа") является известной практикой, использующей криптографию, в которой криптографические ключи обмениваются между двумя сторонами, чтобы устанавливать безопасный сетевой путь между устройствами. После этапа 255, процесс 200 завершается.
[0029] Когда используется в данном документе, наречие "по существу", преобразующее прилагательное, означает, что форма, структура, измерение, значение, вычисление и т.д. может отклоняться от точно описанной геометрии, расстояния, измерения, значения, вычисления и т.д. вследствие несовершенств в материалах, механической обработке, производстве, измерении датчика, вычислениях, времени обработки, времени связи и т.д.
[0030] Вычислительные устройства, к примеру, устройства, поясненные в данном документе, в общем, включают в себя инструкции, исполняемые посредством одного или более вычислительных устройств, к примеру, вычислительных устройств, идентифицированных выше, и для выполнения блоков или этапов процессов, описанных выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, C#, Visual Basic, Java Script, Perl, HTML, PHP и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из запоминающего устройства, машиночитаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и переданы с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[0031] Компьютерно-читаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), который может быть считан посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационные карты, бумажную ленту и другой физический носитель с шаблонами отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0032] Что касается носителей, процессов, систем, способов и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания системы и/или процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие раскрытый предмет изучения.
[0033] Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены не со ссылкой на вышеприведенное описание, а вместо этого должны быть определены со ссылкой на формулу изобретения, приложенную к нему и/или включенную в непредварительную патентную заявку, основанную на ней, вместе с полным объемом эквивалентов, к которым такие пункты формулы изобретения приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПЛАНИРОВАНИЯ РАБОТЫ БЕСПРОВОДНОГО МАЯКА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2700217C2 |
| ОБНАРУЖЕНИЕ КОДИРОВАННОГО СВЕТА | 2015 |
|
RU2689142C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2682945C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2679518C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2697178C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2688405C2 |
| СИСТЕМЫ И СПОСОБЫ ВОДИТЕЛЯ ПО ЗАПРОСУ | 2017 |
|
RU2741521C2 |
| ОБНАРУЖЕНИЕ ОБЪЕКТОВ ВНУТРИ ТРАНСПОРТНОГО СРЕДСТВА В СВЯЗИ С ОБСЛУЖИВАНИЕМ | 2016 |
|
RU2725681C2 |
| СОЗДАНИЕ СЦЕНАРИЯ В ТЕЛЕМАТИЧЕСКОМ БЛОКЕ УПРАВЛЕНИЯ | 2017 |
|
RU2728813C2 |
| ВЕЛОСИПЕД И ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2683357C2 |
Изобретение относится к области определения окружающей среды, ситуаций или целей в беспроводных сетях связи, а именно к определению местоположений мобильных устройств внутри или относительно транспортного средства. Техническим результатом является обеспечение препятствования отвлечению оператора транспортного средства контентом мобильного устройства. Для этого система для определения местоположения мобильного устройства содержит мобильное вычислительное устройство, которое включает в себя процессор и память, которая хранит программные инструкции, исполняемые процессором, чтобы обнаруживать идентификатор в каждом из двух или более асинхронных источников света, обнаруженных посредством датчика света, который включает в себя позицию источника света, и определять угол падения световой волны, принятой от по меньшей мере одного из упомянутых источников света. Кроме того, система выполнена с возможностью использовать, по меньшей мере, систему координат, имеющую начало отсчета в датчике света, и позицию упомянутого источника света, чтобы определять местоположение мобильного устройства на основании по меньшей мере частично определенного угла падения и сообщать местоположение мобильного устройства компьютеру транспортного средства. 2 н. и 16 з.п. ф-лы, 4 ил.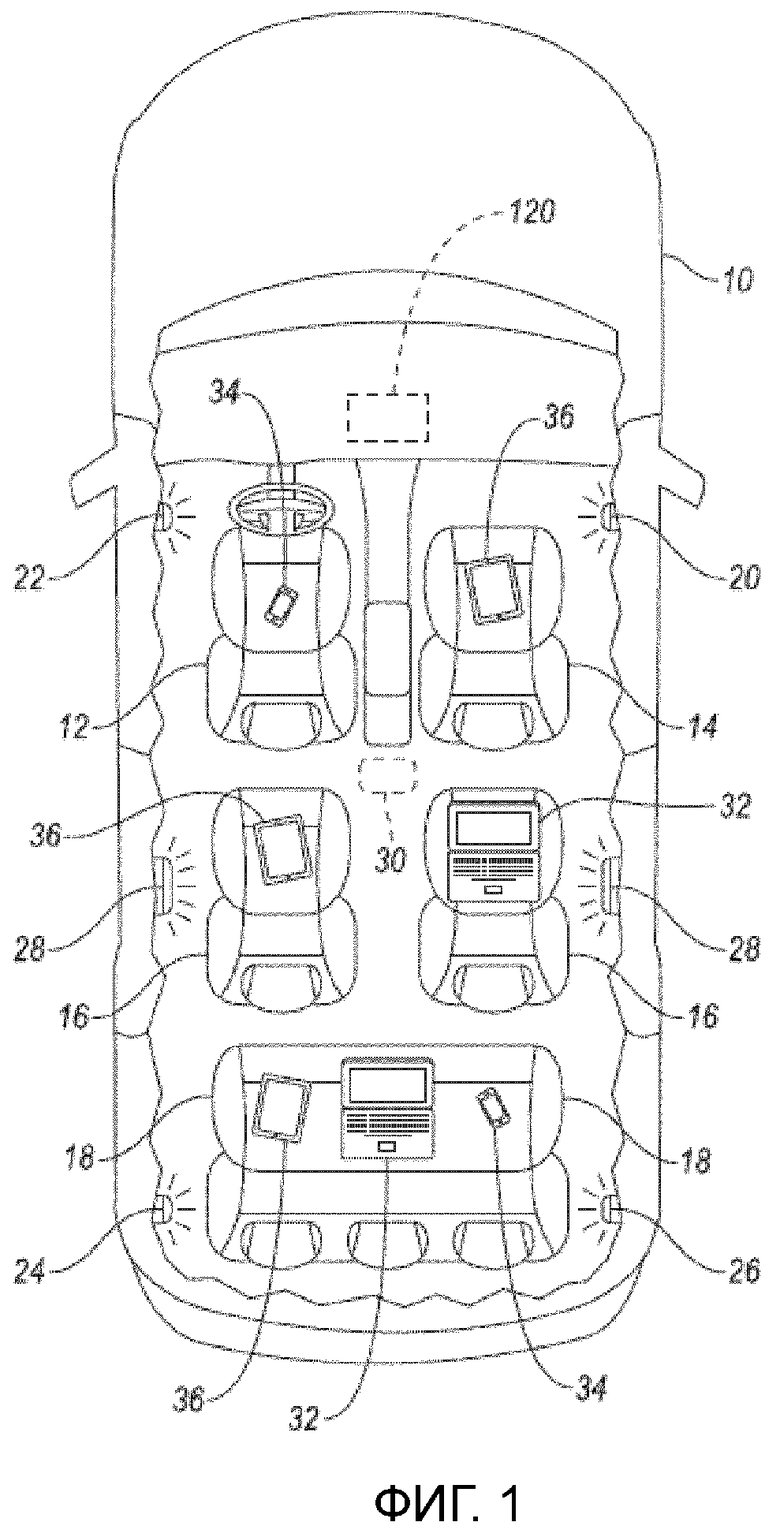
1. Система для определения местоположения мобильного устройства, содержащая мобильное вычислительное устройство, которое включает в себя процессор и память, причем память хранит программные инструкции, исполняемые процессором, чтобы:
обнаруживать идентификатор в каждом из двух или более асинхронных источников света, обнаруженных посредством датчика света, причем идентификатор включает в себя позицию источника света;
определять угол падения световой волны, принятой от по меньшей мере одного из упомянутых источников света;
использовать, по меньшей мере, систему координат, имеющую начало отсчета в датчике света, и позицию упомянутого источника света, чтобы определять местоположение мобильного устройства на основании по меньшей мере частично определенного угла падения; и
сообщать местоположение мобильного устройства компьютеру транспортного средства.
2. Система по п. 1, дополнительно содержащая компьютер транспортного средства, причем компьютер транспортного средства включает в себя процессор и память, причем память компьютера транспортного средства хранит инструкции, чтобы сообщать разрешение использовать систему транспортного средства мобильному устройству.
3. Система по п. 2, в которой система транспортного средства является информационно-развлекательной системой.
4. Система по п. 1, в которой асинхронный источник света содержит светоизлучающий диод (LED).
5. Система по п. 4, в которой LED является многоцветным светоизлучающим диодом.
6. Система по п. 1, дополнительно содержащая память мобильного устройства, которая хранит карту салона транспортного средства, при этом мобильное устройство дополнительно запрограммировано, чтобы определять местоположение мобильного устройства согласно области, указанной посредством карты салона транспортного средства.
7. Система по п. 6, в которой карта включает в себя позиции одного или более асинхронных источников света в транспортном средстве.
8. Система по п. 1, дополнительно содержащая компьютер транспортного средства, причем компьютер транспортного средства включает в себя процессор и память, причем память компьютера транспортного средства хранит инструкции, чтобы инструктировать модуляцию каждого из одного или более источников света, чтобы формировать идентификатор для соответствующего источника света.
9. Система по п. 1, в которой датчик света является датчиком на комплементарном металлоксидном полупроводнике (CMOS) и мобильное устройство дополнительно запрограммировано, чтобы определять соответствующие расстояния в пикселах для одного или более источников света от датчика.
10. Способ определения местоположения мобильного устройства, содержащий этапы, на которых:
обнаруживают идентификатор в каждом из одного или более асинхронных источников света, обнаруженных посредством датчика света, причем идентификатор включает в себя позицию источника света;
определяют угол падения световой волны, принятой от по меньшей мере одного из упомянутых источников света;
используют, по меньшей мере, систему координат, имеющую начало отсчета в датчике света, и позицию источника света, чтобы определять местоположение мобильного устройства на основании по меньшей мере частично определенного угла падения; и
сообщают местоположение мобильного устройства компьютеру транспортного средства.
11. Способ по п. 10, в котором асинхронный источник света содержит светоизлучающий диод (LED).
12. Способ по п. 10, в котором LED является многоцветным светоизлучающим диодом.
13. Способ по п. 10, дополнительно содержащий этап, на котором принимают разрешение использовать систему транспортного средства на основе определенного местоположения.
14. Способ по п. 13, в котором система транспортного средства является информационно-развлекательной системой.
15. Способ по п. 10, дополнительно содержащий этап, на котором сохраняют карту салона транспортного средства, при этом мобильное устройство дополнительно программируется, чтобы определять местоположение мобильного устройства согласно области, указанной посредством карты салона транспортного средства.
16. Способ по п. 15, в котором карта включает в себя позиции одного или более асинхронных источников света в транспортном средстве.
17. Способ по п. 10, дополнительно содержащий этап, на котором инструктируют модуляцию каждого из одного или более источников света, чтобы формировать идентификатор для соответствующего источника света.
18. Способ по п. 10, в котором датчик света является датчиком на комплементарном металлооксидном полупроводнике (CMOS), причем способ дополнительно содержит этап, на котором определяют соответствующие расстояния в пикселах для одного или более источников света от датчика.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| ПЕРЕДАЧА СООБЩЕНИЙ, ОСНОВАННЫХ НА КРИТЕРИЯХ, В ТРАНСПОРТНЫЕ СРЕДСТВА | 2009 |
|
RU2528418C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 8248467 B1, 21.08.2012 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

