ОБАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Это изобретение в общем относится к области беспроводных систем связи транспортного средства и, конкретнее, к системам и способам оптимизации беспроводной связи между транспортным средством и данным водителем транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Различным функциям транспортного средства может потребоваться беспроводная связь для передачи или приема данных, которые могут возникать до входа водителя в транспортное средство. Эта связь требует энергии и должна быть сведена к минимуму, чтобы продлить срок службы аккумулятора транспортного средства.
[0003] Типы беспроводной связи между водителем и транспортным средством могут включать в себя сигналы Bluetooth с низким энергопотреблением (BLE) для идентификации и аутентификации водителя, приближающегося к транспортному средству, и для предварительной загрузки или предварительного конфигурирования различных настроек транспортного средства и информации до входа в транспортное средство.
[0004] Для идентификации и аутентификации водителя транспортного средства до входа в транспортное средство может быть использован протокол периодического беспроводного соединения с низким энергопотреблением. Протокол соединения может включать в себя использование маяка BLE, который пингует с периодической частотой, чтобы определять, находится ли водитель транспортного средства в указанной близости от транспортного средства. Маяк может использовать электрическую энергию транспортного средства, чтобы производить такие пинги, и количество энергии связано с частотой и уровнем энергии, при которых маяк пингует. Однако передача пингов, когда у водителя нет потребности или намерения ехать на транспортном средстве, напрасно растрачивает электрическую энергию транспортного средства.
[0005] В связи с этим существует необходимость прогнозировать отъезд водителя на транспортном средстве, чтобы минимизировать использование энергии транспортного средства, в то же время также максимизируя точность обнаружения приближающегося водителя.
Сущность изобретения
[0006] Раскрыта система планирования работы беспроводного маяка транспортного средства. В одном варианте выполнения система включает в себя транспортное средство, включающее в себя рулевое управление, акселератор, тормоза, процессор и память. Система включает в себя модуль оптимизатора маяка, соединенный с процессором и выполненный с возможностью записи моделей вождения водителя транспортного средства и предварительного конфигурирования и/или активации одной или более водительских настроек транспортного средства перед прогнозируемой поездкой на транспортном средстве, совершаемой водителем согласно моделям вождения водителя.
[0007] Модуль оптимизатора маяка может быть выполнен с возможностью приема данных в реальном времени и/или исторических данных, содержащих модели вождения и парковки водителя. Данные в реальном времени и/или исторические данные могут включать в себя по меньшей мере одно из времени начала поездки, исходного местоположения транспортного средства, расстояния, проезжаемого в поездке, места назначения, к которому движется транспортное средство, данных местоположения, включающих в себя дискретные данные геопозиционирования транспортного средства вдоль проезжаемого пути, продолжительности поездки, продолжительности каких-либо временных остановок, совершаемых вдоль проезжаемого пути, местоположения таких временных остановок и идентификатора ориентира или адреса на или вблизи каждой такой временной остановки, исходного местоположения и конечного места назначения. Данные в реальном времени и/или исторические данные могут включать в себя данные о местоположении GPS и данные времени, связанные с каждым элементом данных позиционирования транспортного средства. Данные в реальном времени и/или исторические данные могут включать в себя по меньшей мере одно из данных календаря водителя и данных социальных сетей водителя.
[0008] Модуль оптимизатора маяка может включать в себя модуль данных водителя, соединенный с процессором и выполненный с возможностью беспроводной синхронизации данных календаря водителя и данных социальных сетей водителя, находящихся в памяти на транспортном средстве, с данными календаря водителя и данными социальных сетей водителя, находящимися в памяти в облачном устройстве хранения. Модуль оптимизатора маяка может включать в себя модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда транспортного средства в течение определенного времени дня и дня недели на основе синхронизированных данных календаря водителя и данных социальных сетей водителя.
[0009] Модуль оптимизатора маяка может включать в себя модуль тепловой карты водителя, соединенный с процессором и выполненный с возможностью идентификации моделей вождения водителя транспортного средства. Модуль тепловой карты водителя может быть выполнен с возможностью определения того, превышает ли проезжаемое расстояние во время поездки от исходного местоположения до места назначения, измеряемое линейно от исходного местоположения, пороговую величину, такую как 1 км. Модуль оптимизатора маяка может включать в себя модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда транспортного средства в течение определенного времени дня и дня недели на основе модели вождения и парковки водителя.
[0010] Модуль оптимизатора маяка может включать в себя модуль оптимизатора частоты пингования, соединенный с процессором и выполненный с возможностью динамического изменения по меньшей мере одного из времени передачи, частоты передачи и продолжительности передачи сигналов Bluetooth с низким энергопотреблением (BLE) в непосредственной близости от транспортного средства на основе вероятности отъезда транспортного средства.
[0011] Модуль тепловой карты водителя может быть выполнен с возможностью регистрации присутствия водителя вблизи транспортного средства. Система может включать в себя модуль планировщика маяка, соединенный с процессором и выполненный с возможностью передачи сигналов BLE от транспортного средства с измененным временем передачи, частотой передачи и продолжительностью передачи.
[0012] Раскрыт другой вариант выполнения системы планирования работы беспроводного маяка транспортного средства. В этом варианте выполнения система включает в себя транспортное средство, включающее в себя рулевое управление, акселератор, тормоза, процессор и память. Система также включает в себя модуль оптимизатора маяка, соединенный с процессором, содержащим данные о моделях вождения водителя, хранящиеся в памяти, и модуль планировщика маяка, соединенный с процессором и выполненный с возможностью передачи данных Bluetooth с низким энергопотреблением (BLE) от транспортного средства перед прогнозируемой поездкой на транспортном средстве, совершаемой водителем, на основе данных о моделях вождения водителя. Модуль планировщика маяка выполнен с возможностью предварительного конфигурирования по меньшей мере одной водительской настройки транспортного средства перед прогнозируемой поездкой на транспортном средстве в ответ на обнаружение водителя в непосредственной близости от транспортного средства с помощью данных BLE.
[0013] Модели вождения водителя могут включать в себя по меньшей мере одно из времени начала поездки, исходного местоположения транспортного средства, расстояния, проезжаемого в поездке, места назначения, к которому движется транспортное средство, данных местоположения, включающих в себя дискретные данные геопозиционирования транспортного средства вдоль проезжаемого пути, продолжительности поездки, продолжительности каких-либо временных остановок, совершаемых вдоль проезжаемого пути, местоположения таких временных остановок и идентификатора ориентира или адреса на или вблизи каждой такой временной остановки, исходного местоположения и конечного места назначения.
[0014] Модуль оптимизатора маяка может включать в себя модуль данных водителя, соединенный с процессором и выполненный с возможностью беспроводной синхронизации данных календаря водителя и данных социальных сетей водителя, находящихся в памяти на транспортном средстве, с данными календаря водителя и данными социальных сетей водителя, находящимися в памяти в облачном устройстве хранения. Модуль оптимизатора маяка может включать в себя модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда на транспортном средстве на основе данных о моделях вождения водителя.
[0015] Модуль оптимизатора маяка может включать в себя модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда на транспортном средстве на основе синхронизированных данных календаря водителя и данных социальных сетей водителя.
[0016] Раскрыт другой вариант выполнения системы планирования работы беспроводного маяка транспортного средства. В этом варианте выполнения система включает в себя транспортное средство, включающее в себя рулевое управление, акселератор, тормоза, процессор и память. Система также включает в себя модуль оптимизатора маяка, соединенный с процессором, содержащим данные о моделях вождения водителя, хранящиеся в памяти, и модуль планировщика маяка, соединенный с процессором и выполненный с возможностью передачи данных Bluetooth с низким энергопотреблением (BLE) от транспортного средства перед прогнозируемой поездкой на транспортном средстве, совершаемой водителем, на основе данных о моделях вождения водителя. Модуль планировщика маяка выполнен с возможностью динамического регулирования по меньшей мере одного из времени передачи, частоты передачи и продолжительности передачи данных BLE от транспортного средства на основе вероятности поездки, совершаемой водителем на транспортном средстве.
[0017] Модуль оптимизатора маяка может включать в себя модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда на транспортном средстве на основе данных о моделях вождения водителя. Модуль оптимизатора маяка может быть выполнен с возможностью предварительного конфигурирования и/или активации одной или более водительских настроек транспортного средства перед прогнозируемой поездкой на транспортном средстве, совершаемой водителем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
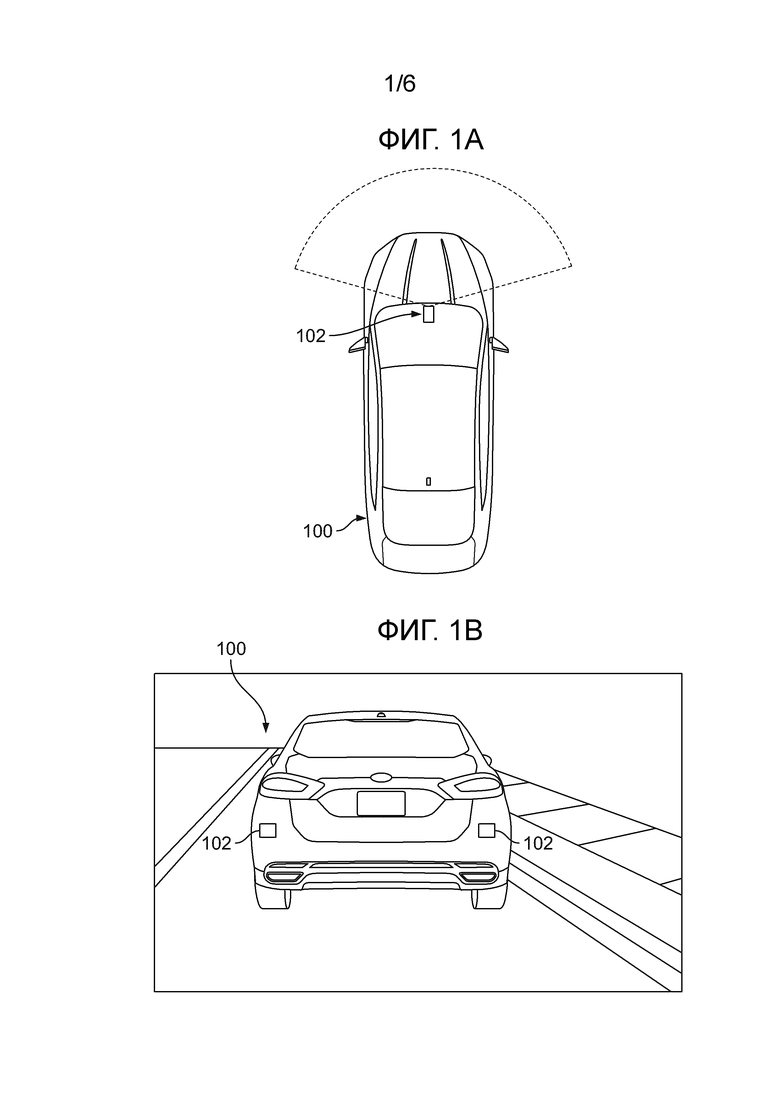
[0018] Фиг. 1А иллюстрирует вид сверху транспортного средства настоящего изобретения.
[0019] Фиг. 1B иллюстрирует вид сзади транспортного средства, показанного на Фиг. 1А.
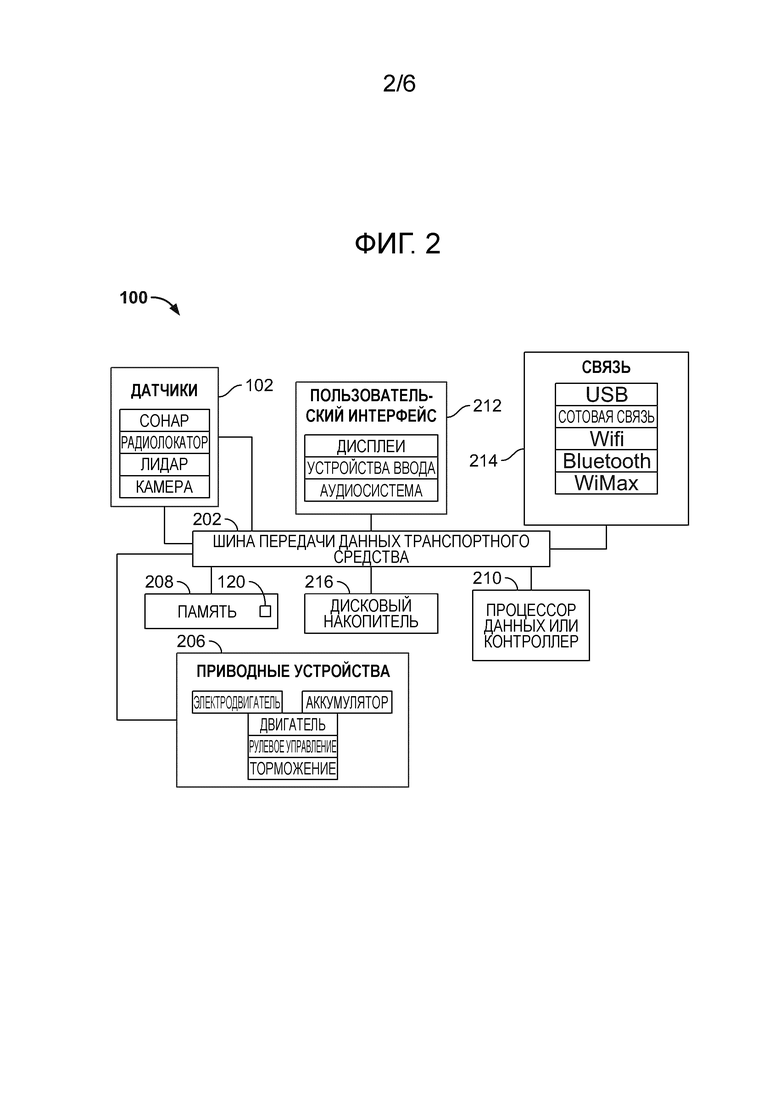
[0020] Фиг. 2 иллюстрирует блок-схему примерных компонентов транспортного средства, показанного на Фиг. 1А.
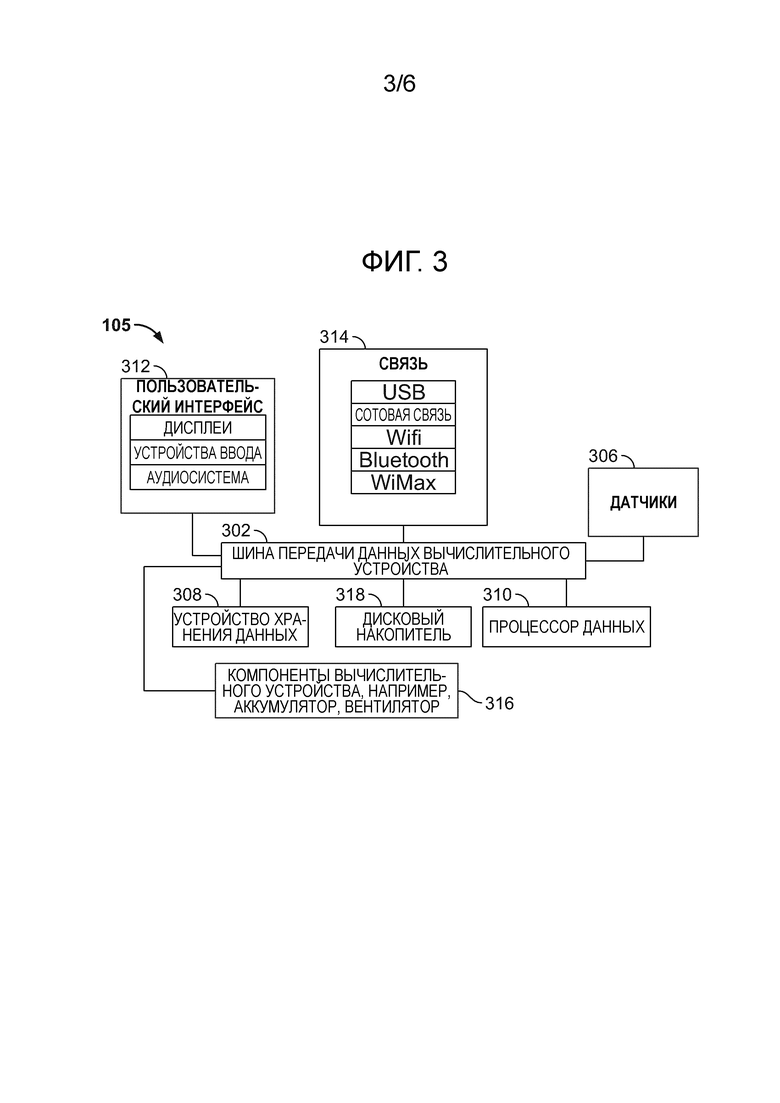
[0021] Фиг. 3 иллюстрирует блок-схему примерного вычислительного устройства, функционально соединенного с транспортным средством, показанным на Фиг. 1А.
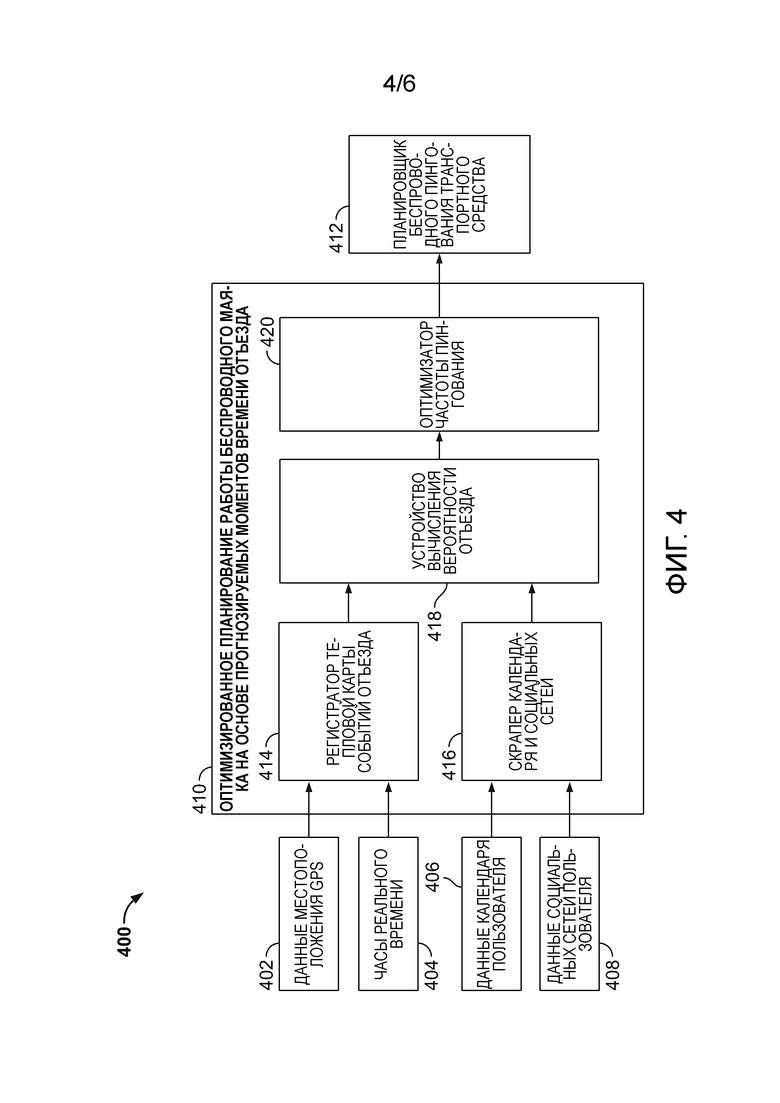
[0022] Фиг. 4 иллюстрирует блок-схему одного варианта выполнения системы планирования работы беспроводного маяка транспортного средства настоящего изобретения.
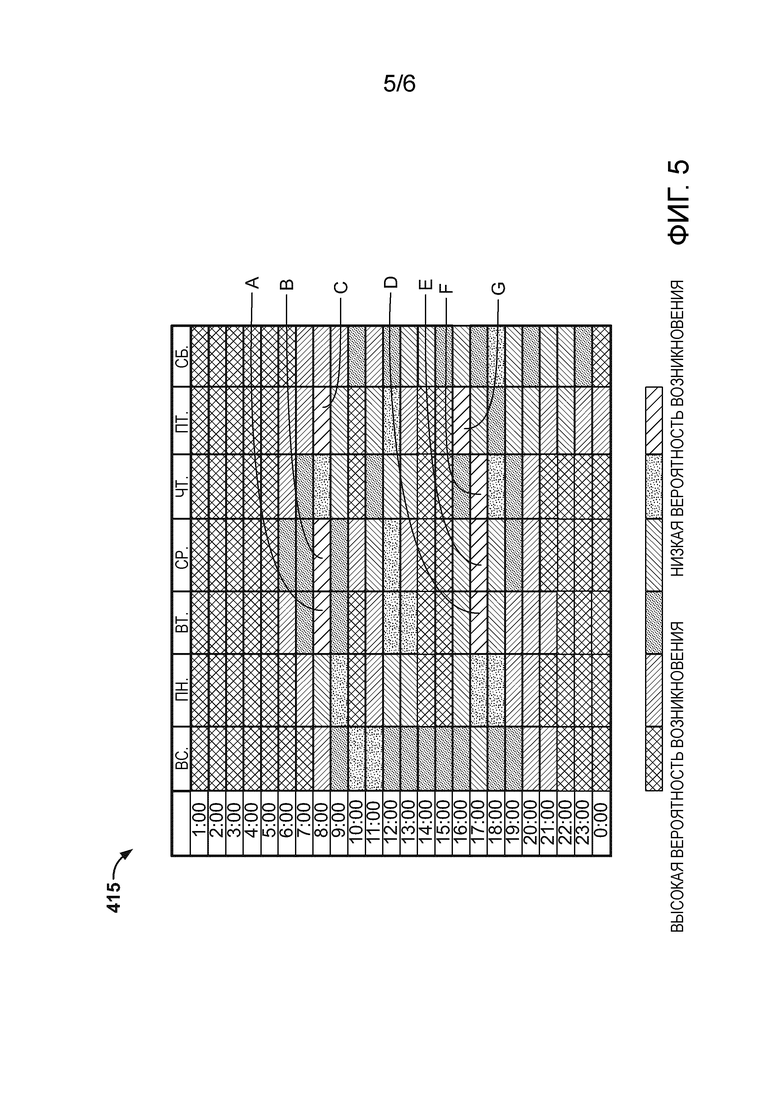
[0023] Фиг. 5 иллюстрирует аспект системы планирования работы беспроводного маяка транспортного средства настоящего изобретения.
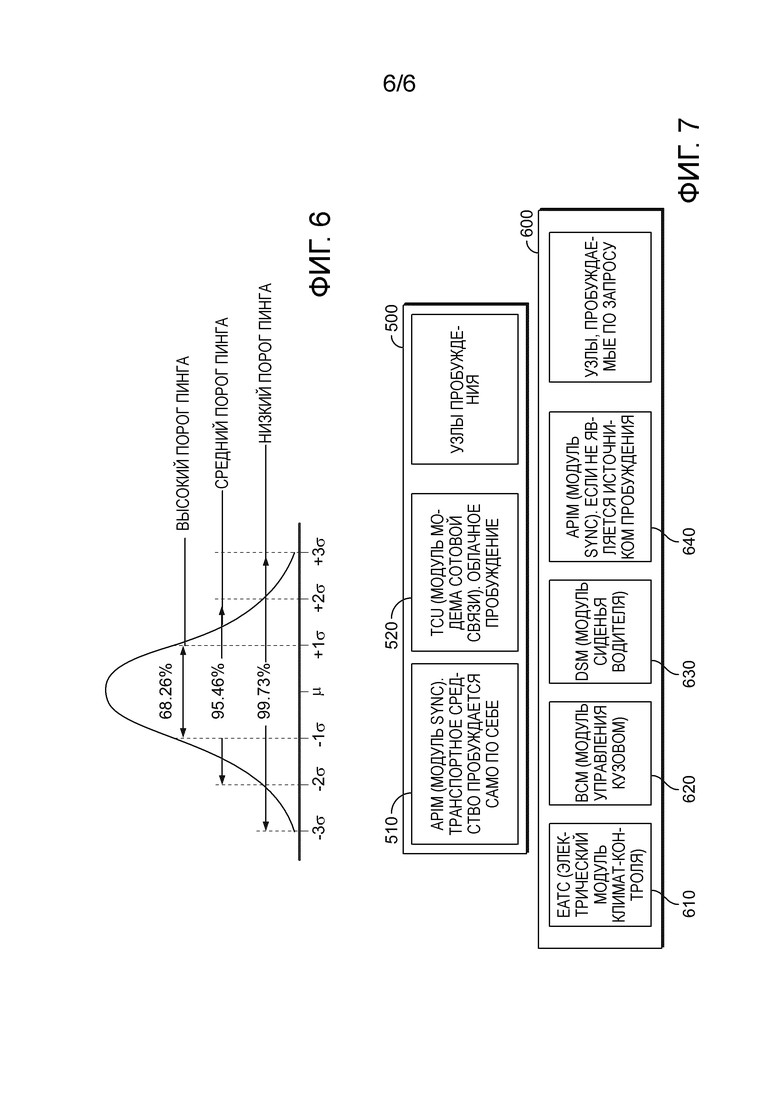
[0024] Фиг. 6 иллюстрирует другой аспект системы планирования работы беспроводного маяка транспортного средства настоящего изобретения.
[0025] Фиг. 7 иллюстрирует еще один аспект системы планирования работы беспроводного маяка транспортного средства настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0026] Хотя фигуры и настоящее раскрытие описывают один или более вариантов выполнения системы планирования работы беспроводного маяка, специалисту в области техники должно быть понятно, что идеи настоящего изобретения не будут ограничиваться этими вариантами выполнения.
[0027] На чертежах, на которых одинаковые ссылочные позиции относятся к одинаковым элементам, показаны примерные варианты выполнения и способы системы для планирования работы беспроводного маяка транспортного средства для получения одного из множества преимуществ, включая минимизацию использования энергии транспортного средства, в то же время также максимизируя точность обнаружения приближающегося водителя транспортного средства.
[0028] Фиг. 1А-1B показывают транспортное средство 100 в соответствии с одним вариантом выполнения настоящего изобретения. В этом варианте выполнения транспортное средство 100 представляет собой автомобиль, хотя в других вариантах выполнения транспортное средство 100 может быть любым подходящим транспортным средством (таким как грузовик, водное судно или воздушное судно). Транспортное средство 100 может быть бензиновым транспортным средством, гибридным транспортным средством, электрическим транспортным средством, транспортным средством на топливных элементах или любым другим типом подходящего транспортного средства. Транспортное средство 100 может включать в себя стандартные элементы, такие как приборная панель, регулируемые сиденья, один или более аккумуляторов, двигатель или электродвигатель, трансмиссия, система HVAC, включающая в себя компрессор и электронный расширительный клапан, ветровое стекло и/или одно или более окон, двери, зеркало заднего вида, левое боковое зеркало, правое боковое зеркало, ремни безопасности, подушки безопасности, колеса и шины.
[0029] Как показано на Фиг. 1А-1B и 2, транспортное средство 100 может включать в себя датчики 102, которые могут быть размещены внутри и вокруг транспортного средства подходящим образом. Датчики 102 могут быть все одинаковыми или они могут отличаться друг от друга. Датчики 102 могут включать в себя множество датчиков или только один датчик.
[0030] Некоторые из датчиков 102 могут быть выполнены с возможностью получения данных об окружающей среде транспортного средства (например, датчики положения или датчики погоды), как обозначено пунктирной линией на Фиг. 1А, в то время как другие получают данные о компонентах самого транспортного средства (например, датчики уровня топлива или датчики давления масла). Датчики 102 могут быть выполнены с возможностью передачи данных, которые они получают, одному или более контроллерам транспортного средства 100, например, контроллеру 210 (описанному ниже), для дальнейшей обработки. Датчики 102 могут включать в себя любой подходящий датчик или датчики, такие как, но не ограничиваясь: (1) инфракрасные датчики; (2) датчики обзора (такие как камеры); (3) ультразвуковые датчики; (4) радиолокатор; (5) лидар; (6) лазерные датчики; (7) инерциальные датчики (например, инерциальный измерительный блок); (8) датчики скорости вращения колес; (9) датчики дорожных условий (для непосредственного измерения определенных дорожных условий); (10) датчики дождя; (11) датчики высоты подвески; (12) датчики угла поворота рулевого колеса; (13) датчики крутящего момента рулевого колеса; (14) датчики тормозного давления; (15) датчики давления в шинах; или (16) датчики определения местоположения транспортного средства или навигационные датчики (например, система глобального позиционирования). Датчики 102 могут включать в себя датчики переключения передач, выполненные с возможностью обнаружения включения передачи трансмиссии транспортного средства, акселерометры, выполненные с возможностью обнаружения ускорения транспортного средства, датчики скорости для определения скорости транспортного средства, скорости вращения колес и/или скорости вращения рулевого колеса, датчики крутящего момента для определения выходного крутящего момента двигателя или электродвигателя, крутящего момента трансмиссии и/или крутящего момента на колесах и датчики положения для определения углового положения рулевого колеса, положения педали тормоза и/или положения зеркал. Некоторые датчики 102 могут быть установлены внутри пассажирского салона транспортного средства 100, вокруг внешней части транспортного средства или в двигательном отсеке транспортного средства 100. По меньшей мере один датчик 102 может быть использован для идентификации водителя транспортного средства с помощью распознавания лиц, распознавания речи или связи с устройством, таким как ключ транспортного средства или личный мобильный телефон водителя.
[0031] Датчики 102 могут иметь выключенное состояние и различные включенные состояния. Транспортное средство 100 или устройство, функционально соединенное с транспортным средством, может быть выполнено с возможностью управления состояниями или активностью датчиков. Следует понимать, что выражение «внутренние датчики» включает в себя все датчики, установленные на транспортном средстве, включая датчики, которые установлены на внешней части транспортного средства 100.
[0032] Как показано на Фиг. 2, в одном варианте выполнения транспортное средство 100 включает в себя шину 202 передачи данных транспортного средства, функционально соединенную с датчиками 102, приводными устройствами 206 транспортного средства, памятью или устройством 208 хранения данных, процессором или контроллером 210, пользовательским интерфейсом 212, устройствами 214 связи и дисковым накопителем 216.
[0033] Процессор или контроллер 210 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограничиваясь: микропроцессор, платформа на основе микроконтроллера, подходящая интегральная схема или одна или более интегральных схем специального назначения (ASIC).
[0034] Память 208 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, cегнетоэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на основе мемристора, и т.д.); неизменную память (например, EPROM); постоянную память; жесткий диск; твердотельный жесткий диск; или физический диск, такой как DVD. В варианте выполнения память включает в себя множество видов памяти, в частности, энергозависимую память, дополненную энергонезависимой памятью.
[0035] Устройства 214 связи могут включать в себя проводной или беспроводной сетевой интерфейс для обеспечения связи с внешней сетью. Внешняя сеть может представлять собой совокупность одной или более сетей, включая сети на основе стандартов (например, 2G, 3G, 4G, универсальная мобильная телекоммуникационная система (UMTS), Ассоциация GSM (R), стандарт «долгосрочное развитие» (LTE) (TM) и т.д.); WiMAX; Bluetooth; коммуникацию ближнего поля (NFC); WiFi (включая 802.11 a/b/g/n/ac или другие); WiGig; сети системы глобального позиционирования (GPS); и другие доступные во время подачи настоящей заявки, или которые могут быть разработаны в будущем. Дополнительно, внешняя(ие) сеть(и) может(могут) представлять собой сеть общего пользования, например, интернет; частную сеть, например, интранет; или их сочетания, и может использовать множество сетевых протоколов, доступных сейчас или разработанных позже, включая, но не ограничиваясь, сетевые протоколы на основе TCP/IP. Устройства 214 связи также могут включать в себя проводной или беспроводной интерфейс для обеспечения прямой связи с электронным устройством, например, интерфейс USB или Bluetooth.
[0036] Пользовательский интерфейс 212 может включать в себя любые подходящие устройства ввода и вывода. Устройства ввода позволяют водителю или пассажиру транспортного средства 100 вводить преобразования или обновления информации, показываемой, например, на дисплее транспортного средства. Устройства ввода могут включать в себя, например, ручку управления, приборную панель, клавиатуру, сканер, цифровую камеру для получения изображений и/или визуального распознавания команд, сенсорный экран, устройство аудиоввода (например, бортовой микрофон), кнопки, мышь или сенсорную панель. Устройства вывода могут включать в себя устройства вывода на приборной панели (например, циферблаты, световые устройства), исполнительные механизмы, дисплей (например, жидкокристаллический дисплей («LCD»), дисплей на основе органических светодиодов («OLED»), плоскопанельный дисплей, твердотельный дисплей, дисплей на основе элетронно-лучевой трубки («CRT») или проекционный дисплей на лобовом стекле) и динамики. Следует понимать, что выражение нажатие кнопки или элемента также включает в себя нажатие или активацию виртуальной кнопки или элемента, например, используя мышь, чтобы щелкнуть по элементу на дисплее, или нажимая виртуальную кнопку на сенсорном экране.
[0037] Дисковый накопитель 216 выполнен с возможностью приема машиночитаемого носителя. В некоторых вариантах выполнения, дисковый накопитель 216 принимает машиночитаемый носитель, на котором могут содержаться один или более наборов инструкций, таких как программное обеспечение для работы системы 400, описанной ниже. Инструкции могут содержать один или более способов или логическую схему, которые описаны в настоящем документе. В конкретном варианте выполнения инструкции могут находиться полностью или по меньшей мере частично в любой одной или более из основной памяти 208, машиночитаемого носителя и/или в процессоре 210 при выполнении инструкций.
[0038] Выражение «машиночитаемый носитель» следует понимать как включающее себя один носитель или множество носителей, например, централизованную или распределенную базу данных и/или связанные КЭШи и серверы, которые хранят один или более наборов инструкций. Выражение «машиночитаемый носитель» также включает в себя любой материальный носитель, который выполнен с возможностью хранения, кодирования или переноса набора инструкций для выполнения процессором, или которые побуждают систему к выполнению любого одного или более способов или операций, раскрытых в настоящем документе.
[0039] В одном варианте выполнения транспортное средство 100 включает в себя одну или более компьютерных программ или подпрограмм, хранящихся в памяти 208. При выполнении процессором одна или более компьютерных программ или подпрограмм генерируют или выбирают инструкции для выполнения другими элементами транспортного средства. В различных вариантах выполнения одна или более компьютерных программ или подпрограмм выполнены с возможностью направлять инструкции пользовательскому интерфейсу 212, устройствам 214 связи, приводному устройству 206 транспортного средства, датчикам 102, процессору 210 и любым другим компонентам, функционально соединенным с шиной 202 передачи данных транспортного средства. Следует понимать, что транспортное средство 100 может быть полностью автономным или частично автономным.
[0040] В различных вариантах выполнения вычислительное устройство 105 функционально подключено к транспортному средству 100 посредством любого подходящего соединения для передачи данных, такого как WiFi, Bluetooth, USB или сотовое соединение. В одном варианте выполнения, показанном на Фигуре 3, вычислительное устройство 105 включает в себя шину 302 передачи данных, функционально соединенную с датчиками 306, компонентами 316, памятью или устройством 308 хранения данных, процессором или контроллером 310, пользовательским интерфейсом 312 и устройствами 314 связи. Следует понимать, что элементы вычислительного устройства 105 могут быть подобны элементам транспортного средства 100, которые описаны выше. Например, устройства 314 связи вычислительного устройства 105 могут работать подобно устройствам 214 связи транспортного средства 100. Это же применимо к пользовательскому интерфейсу 312, датчикам 306, устройству 308 хранения данных, процессору 310 и дисковому накопителю 318. В различных вариантах выполнения вычислительное устройство 105 представляет собой мобильный телефон или сервер.
[0041] На Фиг. 4 показана блок-схема варианта выполнения системы 400 планирования работы беспроводного маяка транспортного средства. Система 400 включает в себя один или более элементов входных данных, модуль 410 оптимизатора маяка и модуль 412 планировщика маяка. В этом варианте выполнения один или более элементов входных данных для системы 400 включают в себя данные 402 местоположения GPS, данные 404 времени, данные 406 календаря пользователя, данные 408 социальных сетей пользователя. В этом варианте выполнения модуль 410 оптимизатора маяка системы 400 включает в себя модуль 414 тепловой карты пользователя, модуль 416 данных пользователя, модуль 418 прогнозирования отъезда пользователя и модуль 420 оптимизатора пингования.
[0042] Система 400 может быть выполнена с возможностью определения одного или более вероятных моментов времени отъезда для заданного водителя транспортного средства 100. На основе этой информации система 400 может быть выполнена с возможностью планирования излучения от транспортного средства 100 одного или более сигналов Bluetooth с низким энергопотреблением (BLE) при оптимизированной частоте, времени дня и дне месяца, чтобы минимизировать использование аккумулятора транспортного средства, в то же время максимизируя вероятность достижения принимающего устройства водителя, такого как брелок, как можно раньше, при приближении водителя к транспортному средству 100, чтобы позволять системе 400 запускать предварительную загрузку, предварительное конфигурирование или активацию любой одной или более из множества настроек или элементов управления транспортного средства 100. Такие настройки или элементы управления могут включать в себя, но не ограничиваясь, активацию удаленного запуска транспортного средства, настройки климат-контроля, включающие в себя настройки температуры и вентилятора, настройки обогрева и охлаждения сидений, настройки положения сидений, настройки положения рулевого колеса, настройки положения педали тормоза, аудионастройки, включающие в себя ввод аудиоисточника, управление громкостью и т.д., настройки дисплея, настройки информационно-развлекательной системы, навигационные настройки, настройки блокировки дверей, настройки открывания/закрывания багажника и настройки освещения, включающие в себя настройки освещения салона и настройки внешнего освещения. Такие настройки или элементы управления могут быть сконфигурированы и/или могут управляться с помощью одного или более соответственных модулей транспортного средства, таких как модуль информационно-развлекательной системы транспортного средства, включающий в себя модуль интерфейса протокола аксессуаров (APIM), модуль модема сотовой связи, включающий в себя блок управления телематикой (TCU), электрический модуль климат-контроля, включающий в себя электронное управление температурой (EATC), модуль управления кузовом и модуль сиденья водителя, если назвать некоторые из них. Каждый из вышеупомянутых модулей и любой другой может быть выполнен с возможностью связи с системой 400 и наоборот, чтобы управлять вышеупомянутыми настройками или элементами управления транспортного средства 100.
[0043] Чтобы прогнозировать вероятные моменты времени отъезда водителя на транспортном средстве 100, включая вероятное время отъезда в данный день, вероятный день отъезда на данной неделе и вероятный день отъезда в данном месяце, система 400 может быть выполнена с возможностью изучения моделей вождения водителя. Чтобы изучать модели вождения водителя, система 400 может принимать один или более элементов входных данных, которые могут быть данными в реальном времени или которые могут быть историческими данными. В варианте выполнения на Фиг. 4 модуль 414 тепловой карты пользователя модуля 410 оптимизатора маяка системы 400 выполнен с возможностью приема данных в реальном времени или исторических данных, связанных с водителем. Входные данные могут включать в себя идентификатор водителя и/или портативного электронного устройства водителя, выполненного с возможностью приема сигналов BLE, время начала поездки, исходное местоположение транспортного средства 100, расстояние, проезжаемое в поездке, место назначения, к которому движется транспортное средство 100, данные местоположения, включающие в себя дискретные данные геопозиционирования транспортного средства 100 вдоль проезжаемого пути, продолжительность поездки, продолжительность каких-либо временных остановок, совершаемых по пути, местоположение таких временных остановок и идентификатор или приблизительный идентификатор и/или адрес и/или геопозицию, например, ориентиров, домов, предприятий, автозаправочных станций, магазинов, парков, полей, аэропортов, автобусных станций, железнодорожных станций, парковок или гаражей и стадионов на или вблизи каждой такой временной остановки, исходного местоположения и/или конечного места назначения. В варианте выполнения, показанном на Фиг. 4, система 400 принимает по меньшей мере данные 402 местоположения GPS и данные 404 времени.
[0044] Система 400 может быть выполнена с возможностью записи моделей вождения водителя и регистрации в памяти 208 некоторых или всех или одной или более частей некоторых или всех поездок, совершаемых на транспортном средстве 100. В некоторых вариантах выполнения система 400 регистрирует только те поездки, которые превышают выбранное пороговое значение, например, проезжаемое расстояние или продолжительность движения. В одном варианте выполнения условие порогового значения может быть удовлетворено, когда транспортное средство 100 проезжает по меньшей мере 1 км от его исходного местоположения. В другом варианте выполнения условие порогового значения может быть удовлетворено, когда транспортное средство 100 проезжает по меньшей мере 1 км, измеряемый радиально от его исходного местоположения. Система 400 может быть запрограммирована с возможностью регистрации любой поездки на любое расстояние или любой продолжительности по желанию, чтобы получать статистически значимый набор данных для прогнозирования будущих поездок водителя на транспортном средстве 100. В одном варианте выполнения по меньшей мере 50 поездок, в которых транспортное средство 100 проезжает по меньшей мере 1 км радиально от точки отправления, квалифицируются как статистически значимый набор данных.
[0045] В одном варианте выполнения система 400 выполнена с возможностью записи дня, даты, времени и расстояния любой поездки, в которой радиальное расстояние от исходного местоположения транспортного средства превышает 1 км. В варианте выполнения, показанном на Фиг. 4, модуль 414 тепловой карты пользователя модуля 410 оптимизатора маяка системы 400 выполнен с возможностью записи такой информации. После накопления и сохранения статистически значимого количества поездок, в которых радиальное расстояние от исходного местоположения транспортного средства превышает 1 км, модуль 414 тепловой карты пользователя модуля 410 оптимизатора маяка системы 400 выполнен с возможностью формирования таблицы и/или карты, отражающей относительную частоту совершаемых поездок, например, для каждого момента времени дня и для каждого дня недели. Фиг. 5 показывает примерную карту 415, которую модуль 414 тепловой карты пользователя может создавать, отражающую относительную частоту совершаемых водителем поездок на примерной неделе, включая время дня и день недели. В этом примере водитель чаще всего инициировал поездку во вторник (A), среду (B) и пятницу (C) приблизительно в 8:00 утра, во вторник (D), среду (E) и четверг (F) приблизительно в 5:00 вечера и в пятницу (G) в 4:00 вечера. Система 400 может быть выполнена с возможностью постоянного обновления сохраненных данных поездки, чтобы отражать дополнительные поездки, совершаемые водителем, и чтобы отражать любые изменения в моделях вождения водителя.
[0046] В варианте выполнения на Фиг. 4 модуль 416 данных пользователя модуля 410 оптимизатора маяка системы 400 выполнен с возможностью приема данных 406 календаря пользователя, включая данные из электронного календаря, связанного с водителем. Данные 406 календаря пользователя могут включать в себя данные, касающиеся календарных событий, включающих в себя приемы, задачи, встречи водителя и т.п., а также время и место, связанные с такими календарными событиями. Система 400 может быть выполнена с возможностью преобразования адреса или идентификатора места, связанного с календарным событием, в геокодированное местоположение. Чтобы изучать модели вождения водителя, система 400 может быть выполнена с возможностью игнорировать или не принимать во внимание календарное событие, если она определяет, что радиальное расстояние до места, связанного с таким календарным событием, от прогнозируемого начального местоположения для транспортного средства 100 меньше желаемого порогового расстояния.
[0047] В некоторых вариантах выполнения, когда место для календарного события, например, место для встречи, не находится среди данных 406 календаря пользователя, принятых системой 400, система 400, тем не менее, может быть выполнена с возможностью определения местоположения для календарного события на основе предшествующей истории вождения водителя в то же время дня, день недели, неделю года и месяц года, связанные с календарным событием. В одном варианте выполнения, если у водителя по его электронному календарю часто происходит встреча, гипотетически обозначенная «встреча в здании 25», без адреса, связанного с записью календаря, система 400 может быть выполнена с возможностью создавать «метку», связанную с местоположением, где водитель припарковался, для того чтобы присутствовать на «встрече в здании 25». Система 400 может автоматически выполнять обратное геокодирование отмеченного места и после этого связывать это место с будущими встречами в календаре водителя, отмеченными как происходящие в здании 25. Система 400 может быть выполнена с возможностью позволять водителю «отказываться» от любой функции системы 400. Например, водитель может выбирать или иным образом настраивать систему 400, чтобы она не записывала или иным образом не изучала манеру вождения и парковки водителя.
[0048] В варианте выполнения на Фиг. 4 модуль 416 данных пользователя модуля 410 оптимизатора маяка системы 400 выполнен с возможностью приема данных 408 социальных сетей пользователя, включая данные из любых источников данных социальных сетей водителя или сетей, включая Facebook® и т.п. Данные 408 социальных сетей пользователя могут включать в себя данные, касающиеся запланированных или намеченных мест назначения водителя, включая приемы, задачи, встречи водителя и т.п., а также время и место, связанные с такими запланированными местами назначения. Система 400 может быть выполнена с возможностью преобразования адреса или идентификатора, связанного с запланированным местом назначения, в геокодированное местоположение. Чтобы изучать модели вождения водителя, система 400 может быть выполнена с возможностью игнорировать или не принимать во внимание запланированное место назначения, если она определяет, что радиальное расстояние до места, связанного с таким запланированным местом назначения, от прогнозируемого начального местоположения для транспортного средства 100 меньше желаемого порогового расстояния.
[0049] Данные 406 календаря пользователя и данные 408 социальных сетей пользователя могут находиться в памяти в мобильном телефоне водителя, карманном персональном компьютере, персональном компьютере или другом электронном устройстве, включая компьютерный сервер или облачный носитель данных. Данные 406 календаря пользователя и данные 408 социальных сетей пользователя могут быть синхронизированы с или иным образом приняты системой 400 в любое желаемое время и с любым желаемым интервалом, независимо от того, находится ли водитель в или вблизи транспортного средства 100 или в пределах диапазона Bluetooth транспортного средства 100. Система 400 может запрашивать или иным образом извлекать данные 406 календаря пользователя и данные 408 социальных сетей пользователя из памяти, связанной с любым таким электронным устройством. Синхронизация и/или извлечение данных может(могут) возникать с использованием любого из множества протоколов передачи данных, и данные могут быть приняты системой 400 с использованием любого беспроводного или проводного соединения для передачи данных, включая сотовую связь, спутниковое соединение, соединение Wi-Fi, Bluetooth, коммуникацию ближнего поля и USB. Система 400 может автоматически выбирать способ беспроводного соединения для передачи данных в соответствии с уровнем сигнала от соответственного способа связи или сети.
[0050] Система 400 может использовать интерфейс прикладного программирования («API») в качестве интерфейса и/или чтобы действовать в качестве протокола для передачи данных 406 календаря пользователя и/или данных 408 социальных сетей пользователя между одним или обоими из модуля 414 тепловой карты пользователя и модуля 416 данных пользователя и любым машиночитаемым носителем, на котором находятся данные 406 календаря пользователя и/или данные 408 социальных сетей пользователя. В некоторых вариантах выполнения водитель может «соглашаться» или иным образом предоставлять авторизацию любому провайдеру облачных услуг по передаче данных, у которого водитель имеет учетную запись, например, Google®, Facebook®, Microsoft Outlook® и т.п., чтобы позволять провайдеру облачных услуг по передаче данных принимать данные от системы 400 или передавать данные системе 400. В некоторых вариантах выполнения как описано более подробно ниже, один или более модулей транспортного средства могут быть автоматически пробуждены провайдером облачных услуг, чтобы заставлять систему 400 предварительно задавать одну или более настроек транспортного средства 100 в ожидании поездки, совершаемой водителем, в соответствии с данными, хранящимися у провайдера облачных услуг по передаче данных, и независимо от того, находится ли водитель и/или его персональное электронное устройство в пределах диапазона Bluetooth транспортного средства 100. Для дальнейшей интеграции данных 406 календаря пользователя и данных 408 социальных сетей пользователя в систему 400 система 400 может определять часто посещаемые места и группировать их согласно не геокодированным местам встреч и запланированным событиям в этих местах.
[0051] Водитель может выбирать или иным образом настраивать, за какое время перед ожидаемой поездкой эти настройки транспортного средства должны быть предварительно заданы в ожидании поездки. Например, водитель может выбирать, чтобы настройки транспортного средства 100 были предварительно заданы за 2 минуты, 5 минут или 10 минут и т.д. до вычисленного времени отъезда. В некоторых вариантах выполнения водитель может выбирать разнесенное по времени предварительное задание настроек транспортного средства. Например, система 400 может быть выполнена с возможностью инициировать запуск двигателя и устанавливать настройки климат-контроля за 10 минут перед поездкой, чтобы прогревать транспортное средство перед приближением водителя к транспортному средству, и может быть выполнена с возможностью установки замков дверей в разблокированное положение за 30 секунд перед приближением водителя к транспортному средству.
[0052] После определения с помощью модуля 414 тепловой карты пользователя данных, отражающих относительную частоту поездок, совершаемых водителем транспортного средства 100, для каждого времени дня и для каждого дня недели и/или после приема данных 406 календаря пользователя и данных 408 социальных сетей пользователя модулем 416 данных пользователя система 400 далее может динамически регулировать излучение сигналов BLE от транспортного средства 100, чтобы соответствовать или по меньшей мере приближаться к модели времени начала вождения водителя или данным 406 календаря водителя и данным 408 социальных сетей пользователя в ожидании поездки. Для этого модуль 418 прогнозирования отъезда пользователя может быть выполнен с возможностью вычисления вероятности того, что водитель, входящий в транспортное средство 100, будет отъезжать из исходного местоположения в любой момент времени дня и для любого дня недели или месяца. В одном варианте выполнения модуль 418 прогнозирования отъезда пользователя выполнен с возможностью анализа генерируемых данных, отражающих относительную частоту поездок, совершаемых водителем транспортного средства 100, и применения системы весов для вероятных поездок, определяемых модулем 414 тепловой карты пользователя и модулем 416 данных пользователя.
[0053] Модуль 420 оптимизатора частоты пингования модуля 410 оптимизатора маяка системы 400 может быть выполнен с возможностью использовать выходные данные от модуля 418 прогнозирования отъезда пользователя, чтобы затем определять, когда динамически изменять модели передачи BLE от модели передачи по умолчанию, основываясь на вычисленной вероятности того, когда может произойти прогнозируемая поездка. Например, если частота передачи BLE транспортного средства по умолчанию составляет две минуты, то модуль 420 оптимизатора частоты пингования может быть выполнен с возможностью изменения частоты передачи BLE, например, до 15 секунд во время периодов, когда вероятность того, что водитель отправится в поездку из определенного места, является самой высокой.
[0054] Модуль 420 оптимизатора частоты пингования может быть выполнен с возможностью изменения продолжительности передач BLE, чтобы они происходили с измененной частотой передачи. В одном варианте выполнения Передачи BLE происходят каждые 15 секунд в течение первых 5 минут и далее каждые 30 секунд в течение следующих 10 минут. Любая комбинация частоты передачи и продолжительности передачи может быть применена во время этих периодов системой 400, чтобы вмещать различные уровни уверенности в том, что водитель отправится в поездку на транспортном средстве 100 в любой момент времени.
[0055] Модуль 420 оптимизатора частоты пингования может быть выполнен с возможностью уменьшения частоты передачи BLE во время периодов, когда вероятность того, что водитель отправится в поездку из конкретного места, является высокой, но не такой высокой, как самая высокая вероятность. Модуль 420 оптимизатора частоты пингования может быть выполнен с возможностью дальнейшего уменьшения частоты передачи BLE во время периодов, когда вероятность того, что водитель отправится в поездку из конкретного места, является относительно низкой. Модуль 420 оптимизатора частоты пингования может быть выполнен с возможностью существенно сокращать передачи BLE или вообще прекратить передачи BLE, когда вероятность того, что водитель отправится в поездку из конкретного места, является очень низкой или равна нулю, например, когда транспортное средство 100 припарковано на ночь, или когда, например, транспортное средство 100 находится на долгосрочной парковке в аэропорту, что может быть изучено системой 400 путем выполнения обратного геокодирования местоположения транспортного средства.
[0056] Фиг. 6 показывает один пример того, как система 400 может быть выполнена с возможностью динамически преобразовывать модели передачи BLE от транспортного средства 100, основываясь на вероятности того, что водитель отправится в поездку, приводя к повышенной эффективности использования аккумулятора транспортного средства, вероятности того, что водитель будет находиться в пределах диапазона Bluetooth транспортного средства до его отправления в поездку, и скорости, с которой система 400 регистрирует беспроводное соединение с электронным устройством транспортного средства, если назвать некоторые из них. Например, система 400 может быть выполнен с возможностью инициировать передачи BLE с относительно высокой частотой, когда вычисленная вероятность того, что водитель отправится в поездку из конкретного места, составляет приблизительно +/1 сигма (т.е. +/- одно среднеквадратическое отклонение или приблизительно 68,26%) от среднего значения выборки данных. Система 400 может быть выполнена с возможностью инициировать передачи BLE с относительно средней частотой, когда вычисленная вероятность того, что водитель отправится в поездку из конкретного места, составляет приблизительно +/2 сигма (т.е. +/- два среднеквадратических отклонения или приблизительно 95,46%) от среднего значения выборки данных. Система 400 также может быть выполнена с возможностью инициировать передачи BLE с относительно низкой частотой, когда вычисленная вероятность того, что водитель отправится в поездку из конкретного места, составляет приблизительно +/3 сигма (т.е. +/- три среднеквадратических отклонения или приблизительно 99,73%) от среднего значения выборки данных. Система 400 может быть выполнена с возможностью инициировать передачи BLE с любой желаемой частотой.
[0057] В некоторых ситуациях брелок водителя может быть использован другим водителем, что может искажать данные, который система 400 принимает, чтобы изучать манеру вождения водителя. Для дальнейшего повышения точности передачи BLE система 400 может быть выполнена с возможностью использования и данных 406 календаря пользователя и данных 408 социальных сетей пользователя или по меньшей мере одних из данных 406 календаря пользователя и данных 408 социальных сетей пользователя вместе с по меньшей мере одними другими входными данными, такими как данные от модуля 414 тепловой карты пользователя. В одном варианте выполнения система 400 использует данные от персонального телефона водителя, такие как его MAC адрес, чтобы подтверждать вероятную личность водителя транспортного средства 100. В этом варианте выполнения система 400 также может использовать и/или координировать сигналы с приложением, загруженным в память телефона, чтобы сигнализировать системе 400 о приближении водителя к транспортному средству 100.
[0058] После определения измененной частоты передачи BLE для любого заданного времени дня и для любого заданного дня недели модуль 412 планировщика маяка выполнен с возможностью приема данных о динамически изменяемой модели передачи BLE от модуля 420 оптимизатора частоты пингования и планирует передачи BLE, чтобы они возникали в эти дни, моменты времени, и частоты, которые либо вручную вводятся, либо выбираются водителем, либо иным образом определяются системой 400, либо и то, и то.
[0059] На Фиг. 7 показаны различные электронные модули транспортного средства, которые могут быть соединены с системой 400. Эти модули могут, например, управлять любым количеством устройств, подсистем и настроек транспортного средства. Например, транспортное средство 100 может включать в себя различные узлы 500 пробуждения и узлы 600, работающие по запросу, которые могут быть пробуждены по запросу. Узлы 500 пробуждения могут включать в себя модуль 510 информационно-развлекательной системы транспортного средства, такой как модуль интерфейса протокола аксессуаров (APIM), и модуль 520 модема сотовой связи, такой как блок управления телематикой (TCU).
[0060] Модуль 510 информационно-развлекательной системы транспортного средства может включать в себя часы или может быть соединен с часами на борту транспортного средства 100, и выполнен с возможностью пробуждаться сам по себе в соответствии с одной или более запрограммированными временными настройками, эти временные настройки могут быть результатом анализа прогнозирования поездки, выполняемого модулем 410 оптимизатора маяка, как описано выше. Модуль 510 информационно-развлекательной системы транспортного средства может принимать сигналы GPS, сигналы Bluetooth, сигналы Wi-Fi или любые другие беспроводные сигналы, на прием которых он запрограммирован, и после приема этих сигналов, модуль 510 информационно-развлекательной системы может, в свою очередь, заставлять или позволять системе 400 запускать предварительную загрузку, предварительное конфигурирование или активацию любой одной или более из множества настроек или элементов управления транспортного средства 100, описанных выше. Таким образом, водитель «соглашается» или иным образом предоставляет авторизацию провайдеру облачных услуг по передаче данных, у которого водитель имеет учетную запись, чтобы позволять провайдеру облачных услуг по передаче данных принимать данные от системы 400 или передавать данные системе 400 с помощью модуля 510 информационно-развлекательной системы в ожидании поездки, совершаемой водителем, в соответствии с данными, хранящимися у провайдера облачных услуг по передаче данных, и независимо от того, находится ли водитель и/или его персональное электронное устройство в пределах диапазона Bluetooth транспортного средства 100. Подобным образом, модуль 520 модема сотовой связи транспортного средства, такой как блок управления телематикой (TCU), может работать для приема сигналов сотовой связи от провайдера облачных услуг, и, в свою очередь, заставлять или позволять системе 400 запускать предварительную загрузку, предварительное конфигурирование или активацию любой одной или более из множества настроек или элементов управления транспортного средства 100, описанных выше, например, запуская или побуждая запуск любого модуля, который управляет такими соответственными настройками или элементами управления транспортного средства 100.
[0061] Узлы 600, работающие по запросу, могут включать в себя электрический модуль 610 климат-контроля, такой как электронное управление температурой (EATC), модуль 620 управления кузовом, модуль 630 сиденья водителя и модуль 640 информационно-развлекательной системы транспортного средства, такой как модуль интерфейса протокола аксессуаров (APIM). Модуль 510 информационно-развлекательной системы транспортного средства может быть таким же блоком, как модуль 640 информационно-развлекательной системы транспортного средства, который может быть пробужден посредством приема сигнала от модуля 520 модема сотовой связи, соединенного с провайдером облачных услуг. При приеме сигналов сотовой связи от провайдера облачных услуг модуль 520 модема сотовой связи транспортного средства может быть выполнен с возможностью пробуждения модуля 640 информационно-развлекательной системы, чтобы заставлять или позволять системе 400 запускать предварительную загрузку, предварительное конфигурирование или активацию любой одной или более из множества настроек или элементов управления транспортного средства 100, описанных выше. Узлы 500 пробуждения и узлы 600, работающие по запросу, могут включать в себя один или более других модулей, включая те, которые будут созданы в будущем.
[0062] Узлы 600, работающие по запросу, могут быть выполнены с возможностью приема сигналов от водителя или его электронного устройства, такого как брелок, всегда, когда водитель пожелает заставить или позволить системе 400 запускать предварительную загрузку, предварительное конфигурирование или активацию любой одной или более из множества настроек или элементов управления транспортного средства 100, описанных выше. Электрический модуль 610 климат-контроля, который может быть выполнен с возможностью автоматического управления температурой в салоне транспортного средства 100, модуль 620 управления кузовом, который может быть выполнен с возможностью управления аутентификацией брелока, положением окон, положением замков дверей, активацией/деактивацией сигнализации транспортного средства и настроек внутреннего/внешнего освещения, модуль 630 сиденья водителя, который может быть выполнен с возможностью управления, например, положением сиденья и обогревом и охлаждением сидений, и модуль 640 информационно-развлекательной системы транспортного средства, который может быть выполнен с возможностью управления или позволения водителю совершать телефонные звонки с помощью системы hands free, изменения аудио настроек и выполнения других функций с использованием голосовых команд, все могут быть пробуждены по запросу водителя.
[0063] Хотя были подробно описано определенные варианты выполнения, специалисту в области техники будет понятно, что различные модификации и альтернативы этим деталям могут быть разработаны в свете общих идей изобретения. Соответственно, раскрытие изобретения, представленное здесь, является лишь иллюстративным, а не ограничивающим его объем охраны, который должен быть задан полной широтой приложенной формулы изобретения и любых ее эквивалентов.
Группа изобретений относится к вариантам системы планирования работы беспроводного маяка транспортного средства. Система содержит: модуль прогнозирования отъезда, модуль частоты пингования и модуль оптимизатора маяка. Модуль прогнозирования отъезда служит для определения: вероятности отъезда на основе моделей вождения водителя, данных местоположения GPS, данных времени, данных календаря пользователя и данных социальных сетей пользователя. Модуль частоты пингования служит для увеличения скорости передачи на основе вероятности отъезда и увеличивает скорость передачи в заданное время для заданной продолжительности передачи сигналов для обнаружения водителя. Модуль оптимизатора маяка служит для предварительного конфигурирования водительских настроек перед прогнозируемой поездкой после обнаружения, что водитель находится в области модуля частоты пингования. Достигается минимизация использования энергии транспортного средства во время отсутствия водителя. 3 н. и 19 з.п. ф-лы, 8 ил.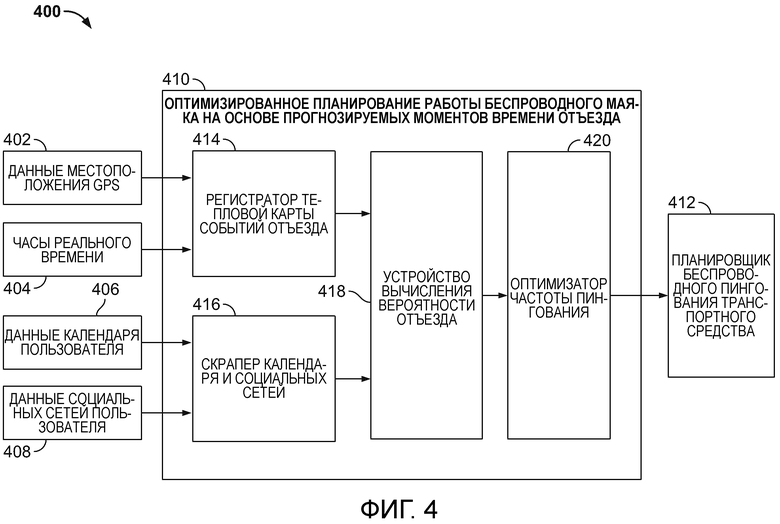
1. Система планирования работы беспроводного маяка транспортного средства, включающего в себя процессор и память, при этом система содержит:
модуль прогнозирования отъезда для определения вероятности отъезда на основе моделей вождения водителя, данных местоположения GPS, данных времени, данных календаря пользователя и данных социальных сетей пользователя;
модуль частоты пингования для:
увеличения скорости передачи на основе вероятности отъезда от скорости передачи по умолчанию до увеличенной скорости передачи в заданное время передачи для заданной продолжительности передачи для сигналов для обнаружения водителя;
выбора первой скорости передачи для первой части заданной продолжительности передачи и второй скорости передачи, которая меньше, чем первая скорость передачи, для второй части заданной продолжительности передачи, которая возникает после и которая дольше первой части; и
регулировки величины увеличения от скорости передачи по умолчанию до увеличенной скорости передачи, при этом величина увеличения является переменной по отношению к данным местоположения GPS, данным времени, данным календаря пользователя и данным социальных сетей пользователя; и
модуль маяка для предварительного конфигурирования водительских настроек перед прогнозируемой поездкой после обнаружения, что водитель находится в области модуля частоты пингования.
2. Система по п. 1, в которой модуль маяка выполнен с возможностью приема по меньшей мере одних из данных в реальном времени и исторических данных, содержащих модели вождения водителя.
3. Система по п. 2, в которой по меньшей мере одни из данных в реальном времени и исторических данных включают в себя по меньшей мере одно из времени начала поездки, исходного местоположения транспортного средства, расстояния, проезжаемого в поездке, места назначения, к которому движется транспортное средство, данных местоположения, включающих в себя дискретные данные геопозиционирования транспортного средства вдоль проезжаемого пути, продолжительности поездки, продолжительности каких-либо временных остановок, совершаемых вдоль проезжаемого пути, местоположения таких временных остановок и идентификатора ориентира или адреса на или вблизи каждой такой временной остановки, исходного местоположения и конечного места назначения.
4. Система по п. 2, в которой по меньшей мере одни из данных в реальном времени и исторических данных включают в себя данные о местоположении GPS и данные времени, связанные с каждым элементом данных о местоположении транспортного средства.
5. Система по п. 2, в которой по меньшей мере одни из данных в реальном времени и исторических данных включают в себя по меньшей мере одни из данных календаря водителя и данных социальных сетей водителя, при этом модуль маяка включает в себя модуль данных водителя, соединенный с процессором и выполненный с возможностью беспроводной синхронизации данных календаря водителя и данных социальных сетей водителя, находящихся в памяти на транспортном средстве, с данными календаря водителя и данными социальных сетей водителя, находящимися в памяти на облачном устройстве хранения, и при этом модуль прогнозирования отъезда соединен с процессором и выполнен с возможностью определения вероятности отъезда транспортного средства в течение определенного времени дня и дня недели на основе синхронизированных данных календаря водителя и данных социальных сетей водителя.
6. Система по п. 2, в которой модуль частоты пингования выбирает увеличенную скорость передачи, основываясь на среднеквадратическом отклонении исторических данных моделей вождения водителя.
7. Система по п. 1, в которой модуль частоты пингования включает в себя модуль тепловой карты водителя, соединенный с процессором и выполненный с возможностью идентификации моделей вождения водителя транспортного средства, при этом модуль тепловой карты водителя выполнен с возможностью определения того, превышает ли проезжаемое расстояние во время поездки от исходного местоположения до места назначения, измеряемое линейно от исходного местоположения, пороговую величину, отличную от нуля.
8. Система по п. 7, в которой модуль прогнозирования отъезда соединен с процессором и выполнен с возможностью определения вероятности отъезда транспортного средства для определенного времени дня и дня недели на основе моделей вождения водителя транспортного средства.
9. Система по п. 8, в которой сигналы для обнаружения водителя вблизи транспортного средства являются сигналами Bluetooth с низким энергопотреблением (BLE).
10. Система по п. 9, в которой модуль тепловой карты водителя выполнен с возможностью регистрации присутствия водителя вблизи транспортного средства.
11. Система по п. 9, включающая в себя модуль планировщика маяка, соединенный с процессором и выполненный с возможностью передачи сигналов BLE от транспортного средства в заданное временем передачи, с увеличенной скоростью передачи и заданной продолжительностью передачи.
12. Система по п. 7, в которой модуль маяка выполнен с возможностью:
определять меньше или нет проезжаемое расстояние во время поездки, чем пороговая величина; и
игнорировать поездку при определении того, что проезжаемое расстояние прогнозируемой поездки меньше, чем пороговая величина.
13. Система по п. 1, в которой, основываясь на вероятности отъезда, модуль частоты пингования выбирает первую скорость передачи первой части заданной продолжительности передачи, первую продолжительность для первой части, вторую скорость передачи второй части и вторую продолжительность для второй части.
14. Система по п. 1, в которой модуль прогнозирования отъезда также выполнен с возможностью:
если данные календаря водителя включают в себя представленное пользователем календарное событие, которое не связано с каким-либо местоположением, связывать местоположение, в котором транспортное средство припарковано, с представленным пользователем календарным событием в тот момент времени, в который появляется представленное пользователем календарное событие.
15. Система по п. 1, в которой модуль прогнозирования отъезда также выполнен с возможностью:
формировать график, основываясь на данных местоположения GPS, данных времени, данных календаря пользователя и данных социальных сетей пользователя;
если вероятность того, что водитель отправится в прогнозируемую поездку, будет в одном среднеквадратическом отклонении, отдаленном от значения вероятности графика, устанавливать величину увеличения от скорости передачи по умолчанию до увеличенной скорости передачи в первое значение;
если вероятность того, что водитель отправится в прогнозируемую поездку, будет во втором среднеквадратическом отклонении, отдаленном от значения вероятности графика, устанавливать величину увеличения от скорости передачи по умолчанию до увеличенной скорости передачи во второе значение; и
если вероятность того, что водитель отправится в прогнозируемую поездку, будет в третьем среднеквадратическом отклонении, отдаленном от значения вероятности графика, устанавливать величину увеличения от скорости передачи по умолчанию до увеличенной скорости передачи в третье значение,
при этом первое значение больше второго значения и третьего значения, и второе значение больше, чем третье значение.
16. Система планирования работы беспроводного маяка транспортного средства, включающего в себя рулевое управление, акселератор, тормоза, процессор и память, при этом система содержит:
модуль оптимизатора маяка, соединенный с процессором, содержащим данные о модели вождения водителя, хранящиеся в памяти;
модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда транспортного средства на основе модели вождения водителя, данных местоположения GPS, данных времени, данных календаря пользователя и данных социальных сетей пользователя;
модуль планировщика маяка, соединенный с процессором и выполненный с возможностью передачи данных Bluetooth с низким энергопотреблением (BLE) от транспортного средства перед прогнозируемой поездкой на транспортном средстве, совершаемой водителем, на основе данных о моделях вождения водителя; и
модуль прогнозирования частоты пингования для:
увеличения скорости передачи для передачи данных BLE на основе вероятности отъезда от скорости передачи по умолчанию до увеличенной скорости передачи в заданное время передачи для заданной продолжительности передачи;
выбора первой скорости передачи для первой части заданной продолжительности передачи и второй скорости передачи, которая меньше, чем первая скорость передачи, для второй части заданной продолжительности передачи, которая возникает после и которая дольше первой части; и
регулировки величины увеличения от скорости передачи по умолчанию до увеличенной скорости передачи, при этом величина увеличения является переменной по отношению к данным местоположения GPS, данным времени, данным календаря пользователя и данным социальных сетей пользователя; при этом
модуль планировщика маяка выполнен с возможностью предварительного конфигурирования по меньшей мере одной водительской настройки транспортного средства перед прогнозируемой поездкой на транспортном средстве в ответ на обнаружение водителя в непосредственной близости от транспортного средства с помощью данных BLE.
17. Система по п. 16, в которой данные модели вождения водителя включают в себя по меньшей мере одно из времени начала поездки, исходного местоположения транспортного средства, расстояния, проезжаемого в поездке, места назначения, к которому движется транспортное средство, данных местоположения, включающих в себя дискретные данные геопозиционирования транспортного средства вдоль проезжаемого пути, продолжительности поездки, продолжительности каких-либо временных остановок, совершаемых вдоль проезжаемого пути, местоположения таких временных остановок и идентификатора ориентира или адреса на или вблизи каждой такой временной остановки, исходного местоположения и конечного места назначения.
18. Система по п. 16, в которой модуль оптимизатора маяка включает в себя модуль данных водителя, соединенный с процессором и выполненный с возможностью беспроводной синхронизации данных календаря водителя и данных социальных сетей водителя, находящихся в памяти на транспортном средстве, с данными календаря водителя и данными социальных сетей водителя, находящимися в памяти на облачном устройстве хранения.
19. Система по п. 18, в которой модуль прогнозирования отъезда выполнен с возможностью определения вероятности отъезда на транспортном средстве на основе данных календаря водителя и данных социальных сетей водителя, которые синхронизированы.
20. Система планирования работы беспроводного маяка транспортного средства, включающего в себя рулевое управление, акселератор, тормоза, процессор и память, при этом система содержит:
модуль оптимизатора маяка, соединенный с процессором, содержащим данные о модели вождения водителя, хранящиеся в памяти, при этом модуль оптимизатора маяка выполнен с возможностью:
определять вероятность отъезда транспортного средства на основе данных модели вождения водителя, данных местоположения GPS, данных времени, данных календаря пользователя и данных социальных сетей пользователя, при этом данные модели вождения водителя основаны на модуле тепловой карты водителя, собирающем пороговое значение базовых точек для данных модели вождения водителя, и при этом модуль тепловой карты водителя выполнен с возможностью определять, превышает ли проезжаемое расстояние пороговую величину, отличную от нуля, и игнорировать поездку при определении того, что проезжаемое расстояние прогнозируемой поездки меньше, чем пороговая величина; и
предварительно конфигурировать водительскую настройку транспортного средства перед прогнозируемой поездкой на транспортном средстве в ответ на обнаружение водителя в непосредственной близости от транспортного средства с помощью данных Bluetooth с низким энергопотреблением (BLE); и
модуль планировщика маяка, соединенный с процессором и выполненный с возможностью:
передавать данные BLE от транспортного средства перед прогнозируемой поездкой на транспортном средстве, совершаемой водителем, на основе данных о модели вождения водителя;
динамически увеличивать скорость передачи, для передачи данных BLE от транспортного средства, основываясь на вероятности отъезда водителя в транспортном средстве, от скорости передачи по умолчанию до увеличенной скорости передачи, для заданной продолжительности передачи; и
регулировать величину увеличения от скорости передачи по умолчанию до увеличенной скорости передачи, при этом величина увеличения является переменной по отношению к данным местоположения GPS, данным времени, данным календаря пользователя и данным социальных сетей пользователя.
21. Система по п. 20, в которой модуль оптимизатора маяка включает в себя модуль прогнозирования отъезда, соединенный с процессором и выполненный с возможностью определения вероятности отъезда на транспортном средстве на основе данных о модели вождения водителя.
22. Система по п. 20, в которой, основываясь на вероятности отъезда, модуль частоты пингования выбирает первую скорость передачи для первой части заданной продолжительности передачи и вторую скорость передачи для второй части заданной продолжительности передачи, вторая скорость передачи меньше, чем первая скорость передачи, вторая часть больше и возникает после первой части.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

