Перекрестная ссылка на родственные заявки
[1] Настоящая патентная заявка испрашивает приоритет предварительной заявки на патент Австралии № 2014904166, поданной 17 октября 2014 года, содержание которой включено в настоящую заявку посредством ссылки.
Область техники
[2] Настоящее изобретение относится к установке для определения расстояния с целью определения расстояния от объекта до установки. Настоящее изобретение также относится к системе для определения расстояния с целью определения расстояния до объекта.
Предпосылки к созданию изобретения
[3] Во многих областях применения важным является определение данных о расстоянии от точки наблюдения до одного или множества объектов окружающей среды. Например, землемер может использовать данные о расстоянии в качестве одного из измерений для определения местоположения объекта или объектов в окружающей среде. Данные о расстоянии, вкупе с другими данными, такими как ориентация объекта в пространстве относительно точки(-ек) наблюдения, и данные о местоположении точек наблюдения, могут быть использованы для построения карт с топографическими данными или других видов отображения данных, иллюстрирующих местоположение объекта(-ов), и/или контуров объекта(-ов) в окружающей среде.
[4] В известной форме установка для определения расстояния размещена в точке наблюдения, и установка содержит лазерный излучатель для передачи светового лазерного луча по направлению к объекту. Световой луч отражается от объекта, а датчик установки для определения расстояния обнаруживает отражение света. Измеряют время пролета света от лазерного излучателя до объекта, и от объекта до датчика. Указанное время пролета вкупе со скоростью света используют для определения расстояния между установкой для определения расстояния и объектом.
[5] Другие виды установки для определения расстояния включают трехмерные сканеры, определяющие множество расстояний при различных ориентациях в пространстве относительно точки наблюдения. В одном из видов установка содержит лазерный дальномер, управляемый с целью выполнения нескольких измерений при соответствующих ориентациях в пространстве. Результаты измерений могут быть использованы для предоставления данных о контурах объекта или объектов, или даже данных о среде, окружающей точку наблюдения. Подобные данные могут быть полезны для определения размеров и формы окружающего рельефа в подземной шахте.
[6] В настоящем документе слово «включают (содержат)» или его вариации, например, «включает (содержит)» или «включающий (содержащий)» следует понимать, как обозначающее включение заявленного элемента, целого числа или стадии, или группы элементов, целых чисел или стадий, но исключение любого другого элемента, целого числа или стадии или группы элементов, целых чисел или стадий.
[7] Любое обсуждение документов, актов, материалов, устройств, публикаций и т. п., приведенное в настоящем описании, не следует интерпретировать как согласие с тем, что любые или все из этих материалов образуют часть уровня техники или были общедоступным знанием в данной области, относящимся к настоящему изобретению, поскольку они существовали до даты приоритета каждого из пунктов формулы изобретения в данной заявке.
Сущность изобретения
[8] Настоящее изобретение обеспечивает систему для определения расстояния, содержащую: электромагнитный выход с обеспечением первого луча электромагнитного излучения по пути первого луча; электромагнитный вход для приема отраженного электромагнитного излучения первого луча от объекта для определения расстояния системы для определения расстояния от объекта; и кожух, содержащий боковую стенку, окружающую центральную ось кожуха, причем боковая стенка выполнена проницаемой для электромагнитного излучения, обеспечиваемого электромагнитным выходом, причем электромагнитный выход и электромагнитный вход размещены внутри кожуха таким образом, что электромагнитный вход расположен вне пути второго луча электромагнитного излучения, заданного зеркальным отражением первого луча от боковой стенки.
[9] Вследствие того, что электромагнитный вход расположен вне пути второго луча, зеркальное отражение первого луча от боковой стенки не достигает электромагнитного входа. Указанная конфигурация может предотвратить или уменьшить воздействие зеркального отражения первого луча, заключающееся в маскировке или создании других помех для электромагнитного входа.
[10] В одном из примеров настоящее изобретение обеспечивает систему для определения расстояния, позволяющую избежать создания зеркальным отражением первого луча от боковой стенки помех для электромагнитного входа путем обнаружения и пространственного ориентирования электромагнитного выхода таким образом, что электромагнитное излучение не отражается от боковой стенки обратно по направлению к электромагнитному выходу и расположенному проксимально от него электромагнитному входу. В другом примере указанная задача решена путем обнаружения и пространственного ориентирования электромагнитного выхода таким образом, что угол падения первого луча на боковую стенку не составляет (и не приближен к) 0 градусов.
[11] В одной форме системы для определения расстояния кожух также содержит один или множество элементов, предотвращающих воспламенение газа вне кожуха, вызываемое инициаторами воспламенения изнутри кожуха. Указанные элементы, в настоящем описании называемые "огнестойкими элементами", соответствуют признанным стандартам огнестойких и взрывобезопасных кожухов, таким как МЭК (IEC) 60079-0, издание6. 0 b: 2011 и МЭК (IEC) 60079-1, издание7. 0 b: 2014. Другие стандарты огнестойких и взрывобезопасных кожухов приведены в публикациях стандартов США: ANSI/UL1203: 2006, стандартов Великобритании BS EN 60079-1: 2007; и/или стандартов Австралии AS60079. 1: 2007. В некоторых примерах реализации указанные элементы содержат уплотнительные элементы, которые, в совокупности с боковой стенкой, изолируют внутреннюю часть кожуха от внешней среды вне кожуха таким образом, что один или множество уплотнительных элементов предотвращают воспламенение газа вне кожуха, вызываемое инициаторами воспламенения изнутри кожуха. В одном из примеров изоляция представляет собой герметичную изоляцию. В другом примере реализации огнестойкий и взрывобезопасный кожух не изолирован от окружающей атмосферы герметично, но может содержать детали, в собранном виде плотно прилегающие друг к другу с образованием нескольких зазоров. Однако, конфигурация зазоров может обеспечивать погашение пламени, возникшего в результате воспламенения внутри кожуха, до выхода пламени в атмосферу вне кожуха. Подобные конфигурации могут включать, например, наличие зазоров относительно небольшого размера и/или зазоров, образующих извилистый путь (например, лабиринт) для предотвращения или уменьшения вероятности выхода пламени.
[12] В другом примере реализации кожух содержит внутреннюю стенку и внешнюю стенку. Внешняя стенка предпочтительно выполняет функцию ударопрочного барьера, предпочтительно для обеспечения соответствия вышеуказанным стандартам. Внутренняя стенка предпочтительно способна выдерживать высокое давление, предпочтительно для обеспечения соответствия вышеуказанным стандартам. (например, по меньшей мере 100 кПа, предпочтительно по меньшей мере 500 кПа, более предпочтительно по меньшей мере 1000 кПа). Внутренняя и внешняя стенки могут быть выполнены из одного материала или из различных материалов. В предпочтительном примере реализации внутренняя и внешняя стенки выполнены из стекла. В другом примере реализации одна из стенок выполнена из стекла, а другая стенка выполнена из пластика, например, внешняя стенка может быть выполнена из стекла, а внутренняя стенка может быть выполнена из прозрачного пластика, такого как поликарбонат.
[13] В еще одном из примеров реализации внешняя стенка содержит отслаивающуюся прозрачную пластиковую пленку, такую как полиэфирные пленки, успешно используемые на лобовых стеклах гоночных автомобилей и изготовляемые компанией MADICO, Inc.,Уоберн, штат Массачусетс, под обозначениями изделий LCL-600-XSR и LCL-800-XSR, и пленка толщиной 5-7 мм, поставляемая указанной компанией. Преимущество отслаивающейся пленки заключается в возможности ее замены в случае образования на пленке царапин, что позволяет сохранять требуемую прозрачность кожуха.
[14] Предпочтительно, внутренняя и внешняя стенки ламинированы или прикреплены друг к другу посредством слоя адгезива. Слой адгезива может состоять из жидкой смолы, выполненной из пластикового полимера, изготовленного на акриловой или силиконовой основе, которая может содержать фотоинициаторы, выполненные с возможностью быстрого отверждения нанесенной смолы при подвергании воздействию ультрафиолетового излучения. Один из подобных адгезивов может представлять собой адгезив UV CURE 7155 компании Epoxies Etc.,линейка продукции Deco-Coat, 21 Starline Way, Крэнстон, штат Род-Айленд,02921. В предпочтительном примере реализации агент-адгезив содержит поливинилбутираль (ПВБ). Предпочтительно, слой адгезива снижает склонность кожуха к образованию нескольких отражений источника электромагнитного излучения и степень образования указанных отражений, а также обеспечивает ударопрочный барьер между внутренней и внешней стенками.
[15] В типовом примере реализации кожух содержит стеклянный цилиндр с двойной стенкой, состоящий из внутреннего и внешнего стеклянных цилиндров, ламинированных друг с другом посредством ПВБ (поливинилбутираля) или другого подходящего ламинирующего вещества или адгезива.
[16] Система для определения расстояния может также содержать: первый опорный элемент, выполненный с возможностью поворота внутри кожуха вокруг первой оси поворота, причем электромагнитный выход опирается на первый опорный элемент таким образом, что поворот первого опорного элемента обеспечивает управление первым лучом, обеспеченным электромагнитным выходом.
[17] В другой форме электромагнитный выход смещен относительно первой оси поворота таким образом, что путь первого луча от электромагнитного выхода до боковой стенки не пересекает первую ось поворота. В другой форме первая ось поворота расположена соосно с центральной осью.
[18] Система для определения расстояния может также содержать: второй опорный элемент для обеспечения опоры между электромагнитным выходом и первым опорным элементом, причем второй опорный элемент выполнен с возможностью поворота вокруг второй оси поворота, и причем поворот второго опорного элемента обеспечивает управление первым лучом, обеспеченным электромагнитным выходом. В другой форме вторая ось поворота перпендикулярна первой оси поворота.
[19] В одной форме система для определения расстояния также содержит: модуль контроллера для управления первым лучом с обеспечением множества пространственных ориентаций луча с целью обеспечения множества определений расстояния для объекта или объектов в окружающей среде. В еще одной форме система для определения расстояния содержит процессор для выработки модели изображения окружающей среды в трех измерениях на основании множества определений расстояния.
[20] В одной форме системы для определения расстояния электромагнитный выход содержит лазерный излучатель для обеспечения первого луча в виде лазерного излучения, причем электромагнитный вход содержит светочувствительный элемент для приема отраженного от объекта лазерного излучения.
[21] В альтернативной форме система для определения расстояния содержит лазерный излучатель для обеспечения первого луча в виде лазерного излучения, причем электромагнитный выход содержит первый отражатель для перенаправления первого луча на путь первого луча. В еще одной форме система для определения расстояния содержит светочувствительный элемент для обнаружения отраженного от объекта лазерного излучения, причем электромагнитный вход содержит второй отражатель для перенаправления отраженного лазерного излучения по направлению к светочувствительному элементу.
[22] В одной форме системы для определения расстояния угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, превышает 5 градусов. Предпочтительно, угол падения не превышает 40 градусов, и более предпочтительно, не превышает 30 градусов. При использовании угла меньше 5 градусов повышена вероятность создания зеркальным отражением помех для электромагнитного входа. При использовании углов большего значения повышена отражаемость от боковой стенки, что влечет за собой снижение производительности дальномера.
[23] В одной форме системы для определения расстояния угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, меньше критического угла относительно боковой стенки.
[24] В одной форме системы для определения расстояния боковая стенка представляет собой цилиндрическую боковую стенку. Геометрия боковой стенки обусловлена функциональным требованием, заключающемся в том, что электромагнитный выход и электромагнитный вход размещены внутри кожуха таким образом, что электромагнитный вход расположен вне пути второго луча электромагнитного излучения, заданного зеркальным отражением первого луча от боковой стенки.
[25] В одной форме системы для определения расстояния система также содержит контроллер для наведения первого луча по направлению к отражателю; определения значения интенсивности, указывающего на интенсивность света, отраженного от отражателя и принятого светочувствительным элементом; и определения уровня загрязнения частицами угольной пыли на основании значения интенсивности.
[26] В настоящем изобретении также обеспечена установка для определения расстояния, предназначенная для использования внутри огнеупорного кожуха, содержащего боковую стенку, окружающую центральную ось кожуха, причем установка для определения расстояния содержит: электромагнитный выход с обеспечением первого луча электромагнитного излучения по пути первого луча сквозь цилиндрическую боковую стенку; электромагнитный вход для приема отражения первого луча от объекта с целью определения расстояния установки для определения расстояния от объекта; первый опорный элемент, выполненный с возможностью поворота вокруг первой оси поворота, причем электромагнитный выход опирается на первый опорный элемент, а поворот первого опорного элемента обеспечивает управление первым лучом, и причем электромагнитный выход установлен со смещением относительно первой оси поворота, в результате чего ось пути первого луча от электромагнитного выхода до цилиндрической боковой стенки не пересекает первую ось поворота, в результате чего при нахождении установки для определения расстояния внутри кожуха, когда первая ось поворота соосна центральной оси цилиндрической боковой стенки, электромагнитный вход расположен вне пути второго луча, вызванного зеркальным отражением первого луча от цилиндрической боковой стенки.
[27] В одной форме установка для определения расстояния содержит второй опорный элемент для обеспечения опоры между электромагнитным выходом и первым опорным элементом, причем второй опорный элемент выполнен с возможностью поворота вокруг второй оси поворота, и причем поворот второго опорного элемента обеспечивает управление первым лучом, обеспеченным электромагнитным выходом, причем вторая ось поворота перпендикулярна первой оси поворота.
[28] В настоящем изобретении также обеспечен способ определения расстояния от объекта внутри закрытой среды посредством системы для определения расстояния или установки для определения расстояния, раскрытых в вышеприведенном описании. В одном из примеров способ выполняют в закрытой среде, такой как угольная шахта.
[29] В настоящем изобретении также обеспечен способ моделирования поверхности одного или множества объектов, причем способ включает выполнение множества определений расстояния до одного или множества объектов посредством системы для определения расстояния или установки для определения расстояния, раскрытых в вышеприведенном описании.
[30] Также в настоящем описании раскрыто использование системы для определения расстояния или установки для определения расстояния, раскрытых в вышеприведенном описании, для осуществления множества определений расстояния от одного или множества объектов.
Краткое описание чертежей
[31] Далее описаны примеры реализации настоящего изобретения со ссылкой на сопутствующие чертежи, на которых:
[32] На фиг. 1 показан упрощенный вид системы для определения расстояния, расположенной с целью измерения расстояния от объекта в окружающей среде;
[33] На фиг. 2 показан вид в перспективе системы для определения расстояния, обеспечивающей первый луч электромагнитного излучения, проходящий до объекта, с целью определения расстояния до объекта.
[34] На фиг. 3 показан вид в перспективе электромагнитного выхода, электромагнитного входа, и первого и второго опорных элементов системы для определения расстояния;
[35] На фиг. 4 показан вид сбоку системы для определения расстояния по фиг. 2, причем показаны первый луч, обеспечиваемый электромагнитным выходом, и отраженное электромагнитное излучение первого луча, принимаемое электромагнитным входом;
[36] На фиг. 5 показан вид сверху системы для определения расстояния по фиг. 4;
[37] На фиг. 6 показан упрощенный вид сверху системы для определения расстояния по фиг. 4, причем показан электромагнитный выход в трех различных азимутальных ориентациях вокруг первой оси поворота, и показан пример преломления первого луча;
[38] На фиг. 7(a)-7(c) показан упрощенный вид сбоку фиг. 4, на котором электромагнитный выход показан в трех различных ориентациях по высоте вокруг второй оси поворота, и показан пример воздействия преломления первого луча;
[39] На фиг. 8 показана принципиальная схема системы определения расстояния с модулем контроллера, компьютерной системой и дисплеем;
[40] На фиг. 9(a)-9(c) показан диапазон возможных значений высоты первого луча в одной форме системы для определения расстояния;
[41] На фиг. 10(a)-10(d) показаны виды в перспективе альтернативных форм кожуха системы для определения расстояния;
[42] На фиг. 11(a) и 11(b) показаны виды в перспективе электромагнитного входа, содержащего колпак для защиты магнитного входа от нежелательного электромагнитного излучения;
[43] На фиг. 12(a) и 12(b) показаны виды в перспективе системы для определения расстояния, содержащей отражатели для испытания работы установки для определения расстояния;
[44] На фиг. 13 показан вид сверху установки для определения расстояния, причем электромагнитные выход и вход показаны в двух конфигурациях для определения расстояния от одной точки на объекте;
[45] На фиг. 14(a) и 14(b) показаны виды сверху альтернативных форм установки для определения расстояния; а
[46] На фиг. 15(a)-15(c) показаны виды сверху альтернативных форм кожуха системы для определения расстояния.
Описание примеров реализации изобретения
[47] Пример реализации системы 100 для определения расстояния описан ниже по существу со ссылкой на фиг. 1 и 2.
[48] На фиг. 1 показан упрощенный вид системы 100 для определения расстояния в точке 3 наблюдения с целью определения данных о расстоянии относительно среды 1. Среда 1 содержит объекты 5, 7 и 9, расположенные в пределах видимости системы 100 для определения расстояния. Система 100 для определения расстояния может быть перемещена в направлении A с целью определения первого расстояния 15 между точкой 3 наблюдения и первым объектом 5, причем первый объект 5 расположен в направлении A относительно точки 3 наблюдения. Сходным образом, система 100 для определения расстояния может быть перемещена с целью определения второго расстояния 17 в направлении B до второго объекта 7. Также может быть выполнено несколько определений расстояния от одного объекта, что проиллюстрировано посредством третьего и четвертого расстояний 18 и 19 в направлениях C и D на третьем объекте 9. Может быть выполнено несколько определений расстояния в нескольких направлениях, а данные о расстояниях могут быть комбинированы с целью обеспечения данных о контуре среды, например, в виде трехмерного облака точек. В одной из типовых областей применения объект 9 представляет собой угольный забой в подземной угольной шахте. Обеспечение данных о контуре, представляющее собой картографирование поверхности угольного забоя, посредством раскрытого в настоящем описании дальномера имеет преимущество, заключающееся в том, что в безопорные части шахты заходит меньшее число персонала, и может быть обеспечено более эффективное управление техникой.
[49] Ниже приведено краткое описание системы 100 для определения расстояния со ссылкой на фиг. 2. Система 100 для определения расстояния содержит электромагнитный выход 102 для обеспечения первого луча 104 электромагнитного излучения по пути 106 первого луча по направлению к объекту 112. Первый луч 104 отражается от объекта с обеспечением отраженного электромагнитного излучения 110. Система 100 для определения расстояния также содержит электромагнитный вход 108 для приема отраженного электромагнитного излучения 110 первого луча от объекта 112 для определения расстояния 114 системы 100 для определения расстояния от объекта 112. Система 100 также содержит кожух 120, содержащий боковую стенку 122, окружающую центральную ось 136 кожуха, проницаемую для электромагнитного излучения, обеспечиваемого электромагнитным выходом 102. Электромагнитный выход 102 и электромагнитный вход 108 размещены внутри кожуха 120 таким образом, что электромагнитный вход 108 расположен вне пути 124 второго луча 126 электромагнитного излучения, заданного зеркальным отражением 128 первого луча 104 от боковой стенки 122. Преимущество заключается в том, что указанная конфигурация позволяет предотвратить или уменьшить отрицательное воздействие зеркального отражения 128 первого луча 104, которое может маскировать электромагнитный вход 108, предоставлять ошибочные данные измерений, снижать эффективность или срок службы электромагнитного входа 108, и/или другим образом влиять на определение расстояния посредством системы 100 для определения расстояния.
[50] Система 100 для определения расстояния содержит один или множество уплотнительных элементов 130, которые, вкупе с боковой стенкой 122, изолируют внутреннюю часть кожуха 120 от внешней среды, окружающей кожух 120. Преимущество указанной конфигурации заключается в обеспечении возможности предотвращения воспламенения газа вне кожуха 120, вызываемого инициаторами воспламенения изнутри кожуха.
[51] Система 100 для определения расстояния также содержит первый опорный элемент 132, выполненный с возможностью поворота внутри кожуха 120 вокруг первой оси 134 поворота. Электромагнитный выход 102 опирается на первый опорный элемент 132 таким образом, что поворот первого опорного элемента 132 обеспечивает управление первым лучом 104, обеспеченным электромагнитным выходом 102. Указанная конфигурация позволяет системе 100 для определения расстояния управлять первым лучом 104 с целью определения расстояний в нескольких направлениях. Второй опорный элемент 140 выполнен между электромагнитным выходом 102 и первым опорным элементом 132, и причем второй опорный элемент 140 выполнен с возможностью поворота вокруг второй оси 142 поворота для обеспечения еще одной степени свободы управления первым лучом 104. В показанном примере реализации конфигурация позволяет избежать маскировку входа 108 зеркальным отражением 128 первого луча во всем диапазоне поворота (360 градусов) первого опорного элемента 132 вокруг первой оси 134 поворота.
[52] Ниже приведено подробное описание компонентов системы 100 для определения расстояния.
Первый и второй опорные элементы
[53] Ниже приведено описание первого и второго опорных элементов 132, 140 со ссылкой на фиг. 3-5. Второй опорный элемент 140 опирается на первый опорный элемент 132 с возможностью поворота. В свою очередь, электромагнитный выход 102 и электромагнитный вход 108 опираются на второй опорный элемент 140 с возможностью поворота.
[54] Первый опорный элемент 132 выполнен с возможностью поворота вокруг первой оси 134 поворота с обеспечением азимутального направления φ для управления электромагнитным выходом 102 и электромагнитным входом 108. В одном из примеров реализации первый опорный элемент 132 выполнен с возможностью полного поворота на 360 градусов, что позволяет системе 100 для определения расстояния совершать множество измерений расстояния с целью сканирования окружающей среды.
[55] Первый опорный элемент 132 находится в рабочей связи с приводом 203 (согласно фиг. 8) с целью поворота первого опорного элемента 132 вкупе с опирающимися на него вторым опорным элементом 140, электромагнитным выходом 102 и электромагнитным входом 108. В одной форме привод представляет собой двигатель, такой как шаговый двигатель, получающий приводные команды от модуля 201 контроллера. Привод может приводить первый опорный элемент 132 непосредственно, например, при работе в качестве прямого привода, или опосредованно, например, посредством передаточного механизма или ременного привода. В одной форме передаточный механизм или ременной привод обеспечивает снижение скорости вращения привода с целью обеспечения большей точности перемещения первого опорного элемента 132.
[56] Второй опорный элемент 140 выполнен с возможностью поворота вокруг второй оси 142 поворота, отличной от первой оси 134 поворота, для обеспечения дополнительной степени свободы для поддерживаемых электромагнитных выхода 102 и входа 108. Второй опорный элемент 140 обеспечивает опору для электромагнитного выхода 102, смещенного относительно первой оси 134 поворота таким образом, что путь первого луча от выхода 102 до боковой стенки 122 не пересекает первую ось 134 поворота. Указанная конфигурация вкупе с соосными первой осью поворота и центральной осью обеспечивает путь 106 луча, имеющий угол падения на цилиндрическую боковую стенку 122, не составляющий (и не приближенный к) 0 градусов. Другими словами, путь 106 луча не проходит вдоль нормали 111 поверхности цилиндрической боковой стенки 122, согласно фиг. 5. В результате зеркальное отражение 128 первого луча 104 от цилиндрической боковой стенки 122 образует второй луч 126, имеющий путь 124 второго луча, направленный от электромагнитного выхода 102 и, что более важно, направленный от электромагнитного входа 108, расположенного проксимально от электромагнитного выхода 102.
[57] Кроме того, путь 106 луча может предпочтительно иметь угол падения на цилиндрическую боковую стенку 122, не составляющий (и не приближенный к) 90 градусов. Большой угол может вызывать образование значительного зеркального отражения электромагнитного излучения, что приводит к ослаблению электромагнитного излучения 110, принимаемого электромагнитным входом 108.
[58] В одной форме электромагнитный выход 102 опирается на второй опорный элемент 140 таким образом, что первый луч 104, обеспеченный электромагнитным выходом 102, по существу перпендикулярен второй оси 142 поворота.
[59] В одном из примеров реализации вторая ось 142 поворота перпендикулярна первой оси 134 поворота. Второй опорный элемент 140 обеспечивает изменение высоты ϴ электромагнитных выхода 102 и входа 108 относительно горизонтальной плоскости 138, перпендикулярной первой оси 134 поворота. Перемещение второго опорного элемента 140 может быть обеспечено посредством привода 203, сходного с вышеописанными.
[60] Тот факт, что первый и второй опорные элементы 132, 140 выполнены с возможностью поворота вокруг различных осей 134, 142, обеспечивает возможность управления первым лучом 104 электромагнитного излучения. Следует понимать, что в других примерах реализации вторая ось 142 поворота не обязательно должна быть перпендикулярной первой оси 134 поворота для обеспечения дополнительной степени свободы. Однако, перпендикулярное расположение указанных осей поворота может способствовать простоте управления и вычисления направления первого луча 104.
Электромагнитный выход и электромагнитный вход
[61] Электромагнитный выход 102 и электромагнитный вход 108 выполнены с возможностью обеспечения данных о времени пролета для обеспечения возможности определения расстояния в рабочем режиме. В одной форме электромагнитные выход 102 и вход 108 по существу совмещены (или прилегают друг к другу), причем выход 102 и вход 108 направлены в одном направлении посредством первого и второго опорных элементов 132, 140. Обычно указанный процесс включает наведение электромагнитных выхода 102 и входа 108 по направлению к объекту 112, но в некоторых вариантах могут быть приняты во внимание преломление, смещение, или другие соображения выравнивания, более подробно раскрытые в нижеследующем описании.
[62] В одной форме электромагнитные выход 102 и вход 108 выполнены в виде лазерного дальномера. Таким образом, электромагнитный выход 102 может быть выполнен в виде лазерного излучателя, излучающего один или множество импульсов лазерного излучения для первого луча 104. Электромагнитный вход 108 может быть выполнен в виде светочувствительного элемента, чувствительного к лазерному излучению. Пример лазерного излучателя может содержать лазерный диод. Длина волны лазерного излучения может составлять 850 нм, 905 нм, 1535 нм. В одной форме выход мощности лазерного излучения выполнен управляемым с целью обеспечения соответствия лазерного выхода требованиям безопасности, например, лазер может быть безопасен для глаз, и/или с целью предотвращения вероятности действия лазерного излучения в качестве инициатора воспламенения. В одной форме совокупная мощность лазера и других компонентов в кожухе 120 (таких как двигатели, приводы, светочувствительный элемент, контроллер, модули радиосвязи, и т. д. ) составляет менее 6 Вт. В одном из примеров реализации эффективная излучаемая мощность (от 9 кГц до 60 ГГц) установки предпочтительно не превышает 10 Вт, более предпочтительно не превышает 6 Вт, и наиболее предпочтительно не превышает 4 Вт. Предпочтительно, лазер обладает эффективной излучаемой мощностью не более 1 Вт, и более предпочтительно не более 150 мВт. В конкретном примере реализации установка обладает эффективной излучаемой мощностью (от 9 кГц до 60 ГГц), соответствующей стандарту МЭК (IEC) 60079-0: 2011, предпочтительно для газов группы I (например, для среды добычи угля).
[63] Для обеспечения определения расстояния электромагнитный выход 102 обеспечивает импульс лазерного излучения (в первом луче 104), проходящий сквозь боковую стенку 122 кожуха 120 по направлению к объекту 112. Свет отражается от объекта 122, и по меньшей мере часть отраженного лазерного излучения 110 перемещается обратно по направлению к системе 100 для определения расстояния, проходит сквозь боковую стенку 122 с последующим приемом указанного излучения электромагнитным входом 108. Для определения расстояния используют время пролета между выходом 102 светового импульса и приемом входа отраженного излучения. В системе 100, в которой выход 102 расположен поблизости от входа 108, расстояние (или по меньшей мере приближенное значение расстояния) может быть определено посредством следующего уравнения:
 (Уравнение 1)
(Уравнение 1)
[64] Следует понимать, что указанное уравнение может варьироваться в случае учета известных переменных и постоянных значений. Например, лазерное излучение первого луча 104, проходящее сквозь кожух 102, может перемещаться со скоростью, меньшей скорости перемещения света в воздухе. Вариант уравнения может включать вычисление запаздывания по времени импульса света, проходящего сквозь боковую стенку 122. В одной форме может быть использована средняя толщина боковой стенки 122. В другой форме может быть использовано расстояние, которое луч 104 должен пройти сквозь кожух при данной пространственной ориентации электромагнитного выхода 102. В другом примере могут иметь место задержки во времени ответа одного или множества компонентов. Указанные задержки могут быть учтены путем модификации уравнения 1 или путем калибровки системы 100.
[65] В одной форме электромагнитный выход 102 и электромагнитный вход 108 размещены внутри корпуса (не показан). Корпус, вкупе с электромагнитным выходом 102 и электромагнитным входом 108, размещенными внутри корпуса, опирается на второй опорный элемент 140. Таким образом, при повороте первого и второго опорных элементов 132, 140, также происходит поворот кожуха (с выходом 102 и входом 108). Кожух герметизирован с целью снижения пылевого загрязнения. В другом примере реализации кожух герметизирован с целью снижения вероятности воспламенения газа (или другого горючего материала) вне кожуха под воздействием инициаторов воспламенения, расположенных внутри кожуха. Указанная конфигурация обеспечивает дополнительный уровень безопасности в дополнение к уровням безопасности, обеспечиваемым герметизированным кожухом 120. В другой форме кожух может также содержать фильтр, покрывающий электромагнитный вход 108 и обеспечивающий прохождение отраженного электромагнитного излучения 110 одной длины волны, но поглощающий или отражающий излучение одной или нескольких других длин волны.
Кожух
[66] В примере реализации по фиг. 2 кожух содержит боковую стенку 122 и уплотнительный элемент 130 в виде круглой крышки 133, размещенный в верхней части боковой стенки 122. Другой уплотнительный элемент 130 в виде основания (не показан) выполнен с целью взаимодействия с донной частью цилиндрической боковой стенки 122.
[67] В проиллюстрированном примере реализации боковая стенка 122 представляет собой изогнутую боковую стенку, проходящую вокруг центральной оси 136 с образованием цилиндрической боковой стенки. В данном примере реализации стенка проходит вокруг центральной оси 136 на 360 градусов. Указанная конфигурация способствует сканированию в нескольких направлениях посредством системы 100 для определения расстояния, в частности, посредством электромагнитных выхода 102 и входа 108, установленных на первом опорном элементе 132. В одном из примеров реализации указанная конфигурация позволяет осуществлять поворот и сканирование посредством первого опорного элемента 132 во всех направлениях (360 градусов) вокруг системы 100 для определения расстояния.
[68] В одном из примеров реализации первая ось 134 поворота расположена соосно с центральной осью 136 цилиндрической боковой стенки 122. Указанная конфигурация может обеспечивать упрощенное вычисление и/или калибровку системы 100 для определения расстояния. В частности, указанная конфигурация может упрощать вычисление (и/или калибровку) изменений направления или смещения первого луча 104 при прохождении луча сквозь цилиндрическую боковую стенку 122 вследствие того, что угол между первым лучом 104 и нормалью 111 поверхности не зависит от азимутального направления φ.
[69] В альтернативных формах боковая стенка 122 может содержать более одной изогнутой поверхности или грани, и может иметь другие формы. На фиг. 10(a)-10(d) показаны альтернативные формы кожухов 120. На фиг. 10(a) показан кожух с изогнутой боковой стенкой 122, причем изогнутая боковая стенка по меньшей мере частично сходна с поверхностью конуса. На фиг. 10(b) показана многогранная боковая стенка 122, сходная с шестиугольной призмой. На фиг. 10(c) показан еще один альтернативный кожух 120, имеющий планарные боковые стенки 122, образующие кожух, сходный с квадратной пирамидой. На фиг. 10(d) показан другой пример реализации, в котором кожух 120 содержит полусферическую боковую стенку 122.
[70] Согласно вышеприведенному описанию, конфигурация уплотнительных элементов 130 и цилиндрических боковых стенок 122 обеспечивает изоляцию внутренней части кожуха 120 от внешней среды вне кожуха 120. В одной форме изоляция представляет собой герметичную изоляцию, предотвращающую или по существу предотвращающую обмен газов между внутренней частью кожуха 120 и внешней средой, окружающей кожух. Герметичная изоляция предотвращает или снижает вероятность выхода расположенного внутри кожуха 120 инициатора воспламенения, такого как искровой разряд, и образования им воспламенения газа вне кожуха 120. Преимущество указанной конфигурации очевидно при использовании системы 100 для определения расстояния в среде, содержащей горючее топливо, такое как углеводородный газ (такой как метан), угольная пыль, и т. д., встречающееся в подземных шахтах.
[71] Следует понимать, что в других примерах реализации изоляция, образованная уплотнительными элементами 130 и цилиндрическими боковыми стенками 122, может не представлять собой идеальную герметичную изоляцию. В одной форме плотная посадка между уплотнителем 130 и цилиндрическими боковыми стенками 122 может обеспечить достаточный барьер для предотвращения выхода пламени или других инициаторов воспламенения изнутри кожуха 120 в окружающую кожух 120 среду. В одном из примеров между цилиндрическими боковыми стенками 122 и уплотнительными элементами 130 может быть выполнен один или множество зазоров. В другом варианте цилиндрические боковые стенки 122 и/или уплотнительные элементы 130 могут содержать один или множество зазоров. В одном варианте один или множество зазоров (и кожух 120 в целом) соответствуют требованиям по изготовлению огнеупорных кожухов, например, стандартов МЭК (IEC) 60079-0, издание 6.0 b: 2011 и МЭК (IEC) 60079-1, издание7.0 b: 2014, или одного или множества других стандартов, приведенных в настоящем описании.
[72] В проиллюстрированном примере реализации уплотнительные элементы 130 прикреплены к цилиндрической боковой стенке 122 с возможностью отсоединения. Указанная конфигурация обеспечивает доступ и обслуживание деталей, таких как электромагнитный выход 102 и электромагнитный вход 108, внутри кожуха 120. В другом примере реализации уплотнительные элементы 130 могут быть прикреплены к цилиндрической боковой стенке 122 без возможности отсоединения с целью сохранения целостности уплотнения и/или с целью предотвращения или снижения вероятности нанесения ущерба кожуху 120 и размещенным в нем компонентам. В еще одном примере реализации один или множество уплотнительных элементов 130, таких как круглая крышка 133 или основание 134, могут быть выполнены заодно с круглой боковой стенкой 122.
[73] В некоторых примерах реализации уплотнительные элементы 130 по меньшей мере частично выполнены из стали или пластика промышленного качества. Уплотнительные элементы 130 могут быть выполнены из материала или покрыты материалом, не отражающим или по существу не отражающим электромагнитное излучение, обладающее длиной волны, которой обладает излучение, обеспечиваемое электромагнитным выходом 102. Указанная конфигурация снижает вероятность и/или интенсивность многократного отражения электромагнитного излучения, обеспечиваемого электромагнитным выходом 102, внутри кожуха 120, где указанное отражение может быть принято электромагнитным входом 108.
[74] Боковая стенка 122 кожуха 120 выполнена из материала, подобранного таким образом, что материал по существу прозрачен, с целью обеспечения передачи электромагнитного излучения, обладающего длиной волны, которой обладает излучение, обеспечиваемое электромагнитным выходом 102. В одном из примеров материал содержит стекло, прозрачное для излучения с длиной волны, которой обладает излучение, обеспечиваемое лазерным излучателем. Под термином "прозрачный" в данном контексте понимают, что может иметь место некоторое ослабление излучения, но интенсивность передаваемого излучения достаточна для обнаружения излучения, отраженного от объекта.
[75] Материал цилиндрической боковой стенки 122 может быть прозрачным для излучения с длинами волн, отличными от длины волны излучения, обеспечиваемого электромагнитным выходом 102. В одном из примеров реализации может быть желательно исключить прием указанных других длин волн электромагнитным входом 108. Для решения указанной задачи на цилиндрическую боковую стенку 122 может быть нанесено покрытие, отражающее излучение с другими длинами волн с целью предотвращения входа указанного электромагнитного излучения извне кожуха 120 в кожух 120, и предотвращения приема указанного излучения электромагнитным входом 108. В другом варианте цилиндрическая боковая стенка 122 может быть снабжена покрытием, поглощающим излучение с указанными другими длинами волн. В другом примере реализации кожух может быть выполнен из материала, по своей природе непроницаемого для излучения с одной или несколькими другими длинами волн. В еще одном примере реализации может быть обеспечен фильтр, размещенный вне кожуха или внутри кожуха, для отфильтровывания или снижения интенсивности излучения с указанными другими длинами волн с целью предохранения электромагнитного входа 108 от приема указанного излучения.
[76] В одном из примеров системы 100 для определения расстояния цилиндрическая боковая стенка 122 выполнена из упрочненного стекла толщиной примерно 10 мм. Внутренний диаметр цилиндрической боковой стенки 122 имеет радиус 150 мм. В данном примере устройство содержит электромагнитный выход 102, смещенный на 30 мм относительно первой оси 134 поворота (и центральной оси 136), и электромагнитный выход 102 обеспечивает первый луч 104 в направлении, по существу перпендикулярном второй оси 142 поворота. При использовании указанных размеров обеспечен первый луч 104, падающий на боковую стенку 122 под углом, не соответствующим нормали 111 поверхности. Предпочтительно, поверхности боковой стенки 122 должны быть выполнены гладкими и равномерными с целью предотвращения или уменьшения искажения лучей.
[77] Боковая стенка предпочтительно имеет следующие оптические свойства (со ссылкой на рабочую длину или длины волн системы для определения расстояния):
• Внутренняя поверхность боковой стенки обладает коэффициентом зеркального отражения (измеренным при угле падения в 5 градусов), предпочтительно составляющим не более 10%, более предпочтительно составляющим не более 5%, еще более предпочтительно составляющим не более 2%, и наиболее предпочтительно составляющим не более 1%; и
• Прозрачность боковой стенки (измеренная при угле падения в 5 градусов) такова, что обеспечена передача по меньшей мере 90%, более предпочтительно 95%, и наиболее предпочтительно 98% излучения с рабочей длиной волны или длинами волн.
[78] Совокупность низкого коэффициента внутреннего отражения и высокого значения передачи способствует обеспечению отличного качества и надежности работы дальномера. Низкий коэффициент внутреннего отражения может быть достигнут при использовании противоотражающего покрытия, такого как ClarylTM компании DSM (Нидерланды).
Модуль контроллера, компьютерная система и дисплей
[79] На фиг. 8 показан пример реализации системы 100 для определения расстояния, также содержащей модуль 201 контроллера для обеспечения входных данных для приводов 203 с целью рабочего перемещения первого и второго опорных элементов 132, 140 для управления первым лучом 104 электромагнитного выхода 102. Указанная конфигурация обеспечивает возможность осуществления множества определений расстояния до одного или множества объектов 5, 7, 9, 112 в окружающей среде. Модуль 201 контроллера также взаимосвязан с электромагнитным выходом 102 с целью управления выработкой первого луча 104, например, обеспечения команды о рабочей выработке импульса лазерного излучения. Кроме того, модуль 201 контроллера взаимосвязан с электромагнитным входом 108 с целью приема данных от электромагнитного входа 108, таких как данные, полученные от светочувствительного элемента. В одной форме контроллер 201 содержит модуль синхронизации (не показан) для определения времени пролета на основании разности по времени между моментом выхода лазерного излучения из электромагнитного выхода 102 и моментом приема отраженного излучения 110 электромагнитным входом 108. В одной форме модуль синхронизации содержит кварцевый генератор, а контроллер подсчитывает количество колебаний между моментом выработки импульса лазерного излучения и моментом приема сигнала от светочувствительного элемента. Затем контроллер умножает подсчитанное значение на заданную постоянную с целью определения расстояния. Например, частота колебаний может составлять 256 МГц, и в этом случае фактор разрешения составляет 1,17 м.
[80] В одной форме модуль контроллера представляет собой микроконтроллер ATmega640 производства компании Atmel.
[81] Система 100 для определения расстояния также содержит компьютерную систему 205, находящуюся в связи с модулем 201 контроллера посредством порта 207 связи. Компьютерная система 205 содержит процессор 209, связанный с программной памятью 211, памятью 213 данных и портом 207 связи. Программная память 211 представляет собой энергонезависимый машиночитаемый носитель, такой как жесткий диск, твердотельный диск или CD-ROM.
[82] Программное обеспечение, представляющее собой исполнимую программу и хранимое в программной памяти 211, обеспечивает выполнение процессором 209 задач, таких как определение расстояния от объекта 5, 7, 9, 112 до системы 100 для определения расстояния, относительной пространственной ориентации объекта 5, 7, 9 и 112 и системы 100 для определения расстояния, относительного местоположения объекта и/или абсолютного местоположения одной или нескольких точек на поверхности указанного объекта 5, 7, 9 и 112. Указанные данные могут быть определены на основании приема данных о времени пролета от модуля 201 контроллера и данных, относящихся к пространственной ориентации электромагнитного входа 102, управляемого луча 104 и/или входных данных управления для приводов 203.
[83] Дополнительные задачи могут включать отправление процессором 209 модулю 201 контроллера команд о выполнении сканирования (путем выполнения множества определений расстояния) выбранных участков в заданные промежутки времени. Указанный процесс может включать конкретные указания по управлению приводами 203 и электромагнитным выходом 102.
[84] Процессор 209 может затем сохранять в хранилище 213 данных данные о расстоянии от объекта 5, 7, 9, 112 до системы 100 для определения расстояния и другие данные, такие как местоположение системы для определения расстояния, условия среды, дата и время, данные о времени пролета импульса луча и данные для определения пространственной ориентации электромагнитных выхода 102 и входа 108. Данные в хранилище 213 данных могут быть извлечены с целью выполнения анализа или моделирования среды, окружающей систему 100 для определения расстояния.
[85] В другом примере реализации процессор может осуществлять способ выработки модели изображения окружающей среды в трех измерениях на основании множества результатов определений расстояния и соответствующих направлений результатов определений расстояния. В одной форме модель изображения сохранена в хранилище 213 данных. В еще одном примере реализации модель изображения окружающей среды визуально отображена для пользователя на визуальном дисплее 216. Указанное отображение может включать трехмерное облако точек.
Работа системы для определения расстояния во избежание помех для второго входа, вызванных зеркальным отражением
[86] Ниже приведено описание работы примера реализации системы 100 для определения расстояния. Система 100 для определения расстояния в рабочем режиме выполнена с возможностью обеспечения сканирования объектов вокруг системы 100 для определения расстояния по полной дуге (360 градусов) вокруг центральной оси 136. Указанный результат достигнут путем поворота первого опорного элемента 132 вокруг первой оси 134 поворота до выбранного азимута φ. Система 100 для определения направления в рабочем режиме также выполнена с возможностью выполнения определений расстояния на различных высотах ϴ путем поворота второго опорного элемента 140 вокруг второй оси 142 поворота. Указанный процесс проиллюстрирован в примере реализации по фиг. 9(a)-9(c), на которых показан диапазон значений высоты для первого луча 104, включая значения высоты, находящиеся под углом примерно ±40 градусов относительно горизонтальной плоскости 138. Однако следует понимать, что другие примеры реализации могут включать смещение по высоте больше или меньше 40 градусов относительно горизонтали.
[87] Соответственно, в ходе использования система 100 для определения расстояния направляет луч в множество направлений, и луч должен быть передан сквозь кожух 120 во множестве соответствующих точек. Преимущество заключается в том, что система 100 для определения расстояния направляет первый луч 104 на боковую стенку 122 образом, позволяющим избежать маскировки электромагнитного входа 108 вследствие зеркального отражения 128 первого луча 104.
[88] Согласно фиг. 4 и 5, указанный результат достигнут путем наведения первого луча 104 из электромагнитного выхода 102 таким образом, что он падает на боковую стенку 122 под углом, по существу не соответствующим нормали 111 поверхности. В результате зеркальное отражение 128 первого луча 104, показанное в виде второго луча 126, проходящего по пути 124 второго луча, направлено от электромагнитного входа 108 (и расположенного проксимально от него электромагнитного выхода 102).
[89] В примере реализации по фиг. 4 и 5 угол падения первого луча 104 на боковую стенку 122 всегда не соответствует нормали 111 поверхности, вне зависимости от азимутального направления (от поворота первого опорного элемента 132 вокруг первой оси 134 поворота) или угла возвышения (от поворота второго опорного элемента 140 вокруг второй оси 142 поворота). Указанный результат достигнут вследствие обеспечения электромагнитного выхода 102 (и соответствующего пути 106 первого луча), смещенного относительно общей первой оси 134 поворота и центральной оси 136 по существу цилиндрической боковой стенки 122.
[90] В отношении вышеприведенного примера реализации следует иметь в виду, что первый луч 104, падающий на боковую стенку 122 под углом, приближенным (но не точно равным) нормали 111 поверхности, по-прежнему может вызывать зеркальное отражение, которое может влиять на электромагнитный вход 108. Например, первый луч 104 с углом падения на боковую стенку 111 в 1 или 2 градуса может отражать значительное количество электромагнитного излучения обратно по направлению к электромагнитному выходу 102 и расположенному проксимально от него электромагнитному входу 108. Соответственно, в некоторых примерах реализации желателен угол падения первого луча 104 на боковую стенку 122, превышающий 5 градусов. В другом примере реализации угол падения составляет по меньшей мере 10 градусов. В еще одном примере реализации угол падения составляет по меньшей мере 12 градусов, или по меньшей мере 15 градусов, или по меньшей мере 20 градусов. Преимущество большего угла падения может заключаться в снижении воздействия электромагнитного излучения второго луча 126 на электромагнитный вход 108 вследствие отражения второго луча 126 в направлении от электромагнитного выхода 102 и совмещенного с ним электромагнитного входа 108.
[91] В одном из примеров реализации первый опорный элемент 132, вкупе с другими поддерживаемыми компонентами системы 100 для определения расстояния, поворачивают со скоростью примерно 0,25 об/сек. Второй опорный элемент 140, вкупе с поддерживаемыми электромагнитным выходом 102 и электромагнитным входом 108, может быть повернут со скоростью примерно 40 об/сек. Непрерывный поворот опорных элементов 132, 140 обеспечивает возможность выполнения множества измерений расстояния системой 100 для определения расстояния. Следует понимать, что могут быть использованы и другие значения скорости поворота.
[92] В одном из примеров реализации первый опорный элемент 132 и второй опорный элемент 140 выполнены с возможностью поворота на 360 градусов или больше вокруг своих соответствующих осей. Указанная конфигурация позволяет обеспечивать измерение расстояния от двух или более конфигураций электромагнитного выхода 112 до точки на объекте 112. Указанная конфигурация позволяет выполнять избыточные измерения или стереоскопические измерения расстояния до поверхности объекта или окружающей среды. Указанный процесс проиллюстрирован на фиг. 13, на которой первая конфигурация электромагнитного выхода 3102' обеспечивает соответствующий первый луч 3104', проходящий в направлении точки 3112 на объекте 112. Затем электромагнитный вход 3108' принимает отраженное электромагнитное излучение (в целях ясности не показано). Затем электромагнитные выход и вход могут быть переведены во вторую конфигурацию путем перемещения опорных элементов. Во второй конфигурации электромагнитный выход 3102'' обеспечивает соответствующий первый луч 3104'', проходящий в направлении той же точки 3112 на объекте. Затем электромагнитный вход 3102'' принимает отраженное излучение.
[93] Вышеописанный пример представляет собой одно из решений, но следует понимать, что в других примерах реализации может быть использована другая конфигурация для обеспечения первого луча 104, не падающего на боковую стенку под углом, вызывающим зеркальное отражение 128, представляющее собой второй луч 126, направленный по направлению к электромагнитному входу 108. Например, в одном из альтернативных вариантов электромагнитный выход 102 представляет собой первый отражатель (например, зеркало или призму), перенаправляющий лазерное излучение от лазерного излучателя с обеспечением первого луча 104 на пути 106 первого луча. В другом примере реализации электромагнитный вход 108 содержит второй отражатель, перенаправляющий отраженное лазерное излучение 110 на один или множество светочувствительных элементов. В данном примере реализации указанные один или множество первых и вторых рефлекторов обеспечивают смещение лазерного излучателя и/или светочувствительного элемента с целью предотвращения маскировки светочувствительного элемента вторым лучом 124. Примеры указанных альтернативных вариантов описаны ниже.
Преломление первого луча, проходящего сквозь боковую стенку
[94] Согласно вышеприведенному описанию, по существу цилиндрическая боковая стенка 122 способствует вычислению и/или калибровке системы 100 для определения расстояния. На фиг. 6 показан вид сверху электромагнитного выхода в трех положениях 1102', 1102'', 1102''' вокруг первой оси 134 поворота под различными азимутальными углами φ' (равным нулю и не показанным), φ'' и φ'''. При прохождении первого луча 1104', 1104'', 1104''' сквозь цилиндрическую боковую стенку 122, тот факт, что показатель преломления воздуха (внутри кожуха 120 и вне кожуха 120) отличен от показателя преломления материала цилиндрической боковой стенки 122, приводит к преломлению первого луча 1104', 1104'' и 1104'''. Указанный факт приводит к изменению пути первого луча, которое может включать изменение направления и/или смещение пути первого луча. На Фиг. 6 указанный процесс проиллюстрирован первым лучом 1104', 1104'' и 1104''', падающим на цилиндрическую боковую стенку 122. Путь передаваемого первого луча 1104A', 1104A'' и 1104A''' изменяется согласно фиг. 6 на угол α относительно соответствующего исходного пути 1106', 1106''и 1106''' луча. Вследствие того, что первая ось 134 поворота и центральная ось 136 расположены соосно, а также того, что цилиндрическая боковая стенка 122 по существу имеет цилиндрическую форму, изменение пути первого луча 1104, по меньшей мере в компонентах пути в направлениях, перпендикулярных центральной оси 134, по существу единообразно. Другими словами, изменение пути при передаче первого луча 1104A', 1104A'' и 1104A''' является по существу одинаковым (отображено в виде угла α) для всех азимутальных направлений φ вокруг центральной оси 136 согласно фиг. 6.
[95] Следует понимать, что изменение пути, показанное в виде угла α, не является исключительным, и что, в зависимости от свойств материала и физической конфигурации, изменение пути первого луча может включать смещение в луче. В еще одном альтернативном варианте передаваемый первый луч 1104A', 1104A'' и 1104A''' может иметь путь, смещенный и направленный в другом направлении по сравнению с падающим лучом 104', 104'' и 104'''. Следует понимать, что путь отраженного излучения 110, проходящего сквозь боковую стенку 122 и принимаемого электромагнитным входом 108, может быть вычислен (и/или калиброван) посредством принципов, сходных с описанными в отношении первого луча 1104.
[96] В целях ясности настоящего описания лишь изменение пути луча для компонентов в направлениях, перпендикулярных центральной оси 136, показано на фиг. 6. Изменение пути первого луча 104, вызванное изменениями относительной высоты ϴ электромагнитного выхода 102, описано ниже со ссылкой на фиг. 7(a) -7(c).
[97] На фиг. 7(a) показан электромагнитный выход 2102, ориентированный на высоте в 0 градусов таким образом, что первый луч 2104' по существу параллелен плоскости 138, перпендикулярной центральной оси 136. В указанной ориентации передаваемый первый луч 2104B' по существу параллелен и соосен (относительно компонента высоты) с первым лучом 2104' вследствие того, что преломление в компоненте высоты по существу равно нулю.
[98] На фиг. 7(b) показан электромагнитный выход 2102'', ориентированный на средней высоте ϴ'' над плоскостью 138, перпендикулярной центральной оси 136. В данной конфигурации передаваемый первый луч 2104B'' имеет измененный путь по сравнению с первым лучом 2104'' вследствие того, что измененная высота электромагнитного выхода приводит к падению первого луча 2104'' на цилиндрическую боковую стенку 122 под углом падения, превышающем 0 градусов, что приводит к преломлению первого луча в компоненте высоты. Отклонение передаваемого первого луча 2104B'' и первого луча 2104'' показано на чертеже в виде смещения β''. Однако, следует понимать, что отклонение не ограничено смещением, и может (в другом варианте или дополнительно) представлять собой изменение направления пути луча согласно вышеприведенному описанию.
[99] На фиг. 7(c) показан электромагнитный выход 2102''', ориентированный на большой высоте ϴ''' над плоскостью 138, перпендикулярной центральной оси 136. В данной конфигурации передаваемый первый луч 2104B''' имеет более измененный путь по сравнению с первым лучом 2104''' вследствие того, что более значительная высота электромагнитного выхода приводит к падению луча под большим углом падения, что приводит к более значительному преломлению и последующему смещению первого луча в компоненте высоты. Отклонение передаваемого первого луча 2104B''' и первого луча 2104''' показано на чертеже в виде смещения β'''. В данном примере реализации β''' больше β'', а смещение β увеличивается при увеличении угла ϴ высоты.
[100] В одной форме вычисление изменения пути первого луча, включая α и β, может быть выполнено посредством закона Снеллиуса (уравнение 2) в совокупности с соответствующими показателями преломления.
 (Уравнение 2)
(Уравнение 2)
где
θ - угол пути света, измеренный от нормали поверхности границы между средами 1 и 2,
v - скорость света в соответствующей среде, и
n - показатель преломления соответствующей среды.
[101] В одной форме конфигурация электромагнитного выхода 102 обеспечена во избежание полного внутреннего отражения первого луча 104 при падении первого луча на цилиндрическую боковую стенку 122. Указанная конфигурация может включать обеспечение первого и второго опорных элементов 132, 130 таким образом, что электромагнитный выход 102 не ориентирован в пространстве с обеспечением первого луча 104, имеющего угол падения, превышающий значение критического угла границы от воздуха до боковой стенки или от боковой стенки до воздуха.
Вариации и альтернативные варианты
[102] Ниже приведено описание других вариаций и альтернативных вариантов системы 100 для определения расстояния.
Экранирование электромагнитного входа
[103] На фиг. 11(a) и (b) показан пример реализации электромагнитного входа 108, содержащего светочувствительный элемент 310, экранированный посредством колпака 312. В одном из примеров реализации колпак 312 выполнен в виде полой трубки, образующей канал 314. В ходе использования колпак 312 выполнен с возможностью перемещения вместе с другими частями электромагнитного входа 108 таким образом, что канал по существу направлен по направлению к объекту 112, расстояние до которого измеряет система 100 определения расстояния. Канал обеспечивает прохождение отраженного от объекта 112 электромагнитного излучения 110 сквозь колпак 312, и обнаружение указанного излучения светочувствительным элементом 310. С другой стороны, колпак блокирует непосредственный прием светочувствительным элементом 310 электромагнитного излучения, проходящего в других направлениях, такого как второй луч 316 или третий и последующие лучи 318. Преимущество указанной конфигурации может заключаться в предотвращении непосредственного приема светочувствительным элементом 310 многократно отражающегося от боковой стенки 122 второго луча 316. Кроме того, колпак 312 может обеспечивать экранирование светочувствительного элемента 310 от других источников электромагнитного излучения, способных влиять на элемент 310, таких как фонарей (для освещения), солнечный свет, электромагнитное излучение множества путей отраженного электромагнитного излучения, или электромагнитное излучение от другого оборудования для определения расстояния, работающего поблизости.
[104] В одном из примеров реализации колпак 312 может содержать противоотражающие поверхности. Противобликовые барьеры 320 могут быть выполнены с целью экранирования светочувствительного элемента 310 согласно фиг. 11(b).
Испытание пылевого загрязнения
[105] В ходе использования пыль или другие загрязнители могут прилипать к кожуху 120, что может приводить к снижению производительности и эффективности работы устройства 100 для определения расстояния. Например, пыль на внешней стороне кожуха 120 или внутри кожуха может ослаблять или другим образом нарушать первый луч 104 и/или отраженное электромагнитное излучение 110. Указанная ситуация может приводить к уменьшению дальности точной работы устройства для определения расстояния или, в худшем случае, вовсе предотвращать возможность осуществления определения расстояния.
[106] В некоторых примерах реализации пыль представляет собой горючую пыль, такую как угольная пыль или сажа. В некоторых ситуациях повышение уровня содержания пыли внутри или вне кожуха может влечь за собой повышенную угрозу безопасности. Могут быть проведены периодические профилактические осмотры кожуха с целью обеспечения условий, в которых уровень содержания пыли не достигает повышенных значений, которые могут оказывать отрицательное влияние на рабочие показатели установки или влечь за собой повышенную угрозу безопасности.
[107] В одном из примеров реализации устройство 100 для определения расстояния содержит средства определения уровня загрязнения и производительности устройства 100 для определения расстояния. Предпочтительно, в случае превышения заданных значений уровня загрязнения дальномер отправляет оповещение или выключает устройство. В одном из примеров реализации указанное заданное значение соответствует уровню загрязнения, при котором повышена вероятность воспламенения. Согласно фиг. 12(a), устройство 100 для определения расстояния содержит отражатель 351 с отражающей поверхностью 353, выполненной вне кожуха 120. Отражатель 351 обеспечивает отражающую поверхность 353 с известным коэффициентом отражения для обеспечения тестовой (или калибровочной) поверхности.
[108] В одной форме испытание загрязнения включает выработку системой 100 определения расстояния первого луча 104, проходящего сквозь боковую стенку 122 и отражающегося от отражающей поверхности 353, прохождение отраженного электромагнитного излучения 110 сквозь боковую стенку 122, и прием указанного излучения электромагнитным входом 108. Интенсивность принятого электромагнитного излучения 110 может быть сравнена с ранее полученными значениями интенсивности отраженного электромагнитного излучения 110, отраженного от отражающей поверхности 353. Снижение интенсивности может указывать на снижение производительности, например, вследствие пылевого загрязнения внешней стороны боковой стенки 122, внутренней стороны боковой стенки, или других компонентов, таких как электромагнитный выход 102 и электромагнитный вход 108. Снижение интенсивности также может указывать на загрязнение отражающей поверхности 353.
[109] На фиг. 12(b) показан другой пример реализации, содержащий отражатель 355 с отражающей поверхностью 357 внутри кожуха 120. Указанная конфигурация позволяет осуществлять испытание загрязнения, направленное на определение загрязнения внутренней части кожуха 120, например, электромагнитных выхода 102 и входа 108. В другом варианте испытание может быть использовано для определения состояния электромагнитных выхода 102 и входа 108. Например, с течением времени и по мере использования может снижаться интенсивность выхода 102 или чувствительность входа 108 к электромагнитному излучению.
[110] В другой форме результат испытания загрязнения вне кожуха 120 согласно фиг. 12(a) сравнивают с результатом испытания загрязнения внутри кожуха 120 согласно фиг. 12(b). Результат сравнения может указывать на компенсацию загрязнения или снижения производительности электромагнитных выхода 102 и входа 108 загрязнением боковой стенки 122 кожуха 120 или исключить факт подобной компенсации.
[111] В другом примере система 100 для определения расстояния отслеживает отношение сигнал-шум электромагнитного входа 108. Уменьшение отношения сигнал-шум может указывать на пылевое загрязнение одного или множества компонентов системы 100 для определения расстояния. Указанный процесс может быть использован в качестве альтернативы или в совокупности с вышеописанным испытанием загрязнения.
[112] В одной форме программа в программной памяти 211 обеспечивает подачу процессором 209 модулю 201 управления команды о выполнении вышеописанного испытания загрязнения. Указанное испытание может быть выполнено в ходе работы через равные промежутки времени, при запуске системы, при выключении системы или в случае, если интенсивность принятого на электромагнитном входе 108 излучения меньше ожидаемых значений для заданного расстояния от объекта 112 и/или материала, из которого состоит объект 112. Кроме того, в ответ на определение факта загрязнения системы 100 для определения расстояния, программа может отправлять оператору запрос на проведение технического обслуживания системы 100 для определения расстояния и/или выключение системы 100 для определения расстояния. Отправление указанного запроса может быть важным в случае, если загрязнение влечет за собой угрозу воспламенения.
[113] В одной форме контроллер 201 определяет разность по времени между отправлением электромагнитным выходом 102 импульса электромагнитного излучения и приемом электромагнитным входом 108 отраженного импульса электромагнитного излучения без определения интенсивности принятого электромагнитного излучения. Другими словами, электромагнитный вход 108 служит в качестве инициирующего фактора для остановки подсчета импульсов синхронизации. Указанная конфигурация позволяет исключить необходимость использования сверхбыстрого аналого-цифрового преобразования (A/D), и соответственно, позволяет снизить материальные затраты, сложность конструкции и энергопотребление контроллера.
[114] Для определения загрязнения дальномера или наличия частиц в среде или на боковой стенке 122, контроллер 201 может переключать электромагнитный выход 102 из импульсного режима в непрерывный режим, и переключает порт контроллера, связанный с электромагнитным входом 108, из режима срабатывания в режим аналого-цифрового преобразования. Вследствие того, что электромагнитный выход 102 работает в непрерывном режиме, может быть использовано медленное аналого-цифровое преобразование, обеспечиваемое стандартными микроконтроллерами.
[115] Затем результат (т. е., цифровое значение, отражающее интенсивность принятого электромагнитного излучения) может быть сравнен с пороговым значением, хранимым в памяти 213 данных, посредством процессора 209. В случае, если полученный результат ниже порогового значения, процессор 209 определяет, что приемлемый уровень загрязнения превышен. Затем процессор 209 может активизировать оповещение или активизировать световой сигнал управления, указывающие оператору на превышенный уровень загрязнения. Процедура определения уровня загрязнения может выполняться периодически. Предпочтительно, процедуру выполняют каждые 10 секунд или после каждых 10 оборотов вокруг центральной оси 136.
[116] В одной форме в памяти 213 данных сохранены значения азимута и высоты электромагнитного выхода, указывающие на направление от электромагнитного выхода 102 к эталонному зеркалу (такому, как отражающая поверхность 353, 357). Затем процессор 209 может отправлять управляющие данные на модуль 201 контроллера с целью перевода электромагнитного выхода 102 в режим непрерывного выхода в случае, если азимут и высота выхода 102 равны сохраненным значениям или находятся в пределах, например, 1 градуса от сохраненных значений.
[117] Процессор 209 также отправляет управляющие данные на модуль 201 контроллера с целью переключения порта контроллера, связанного с электромагнитным входом 108, в режим аналого-цифрового преобразования в случае, если азимут и высота выхода 102 равны сохраненным значениям или находятся в пределах, например, 1 градуса от сохраненных значений.
[118] При этом расстояние до эталонного зеркала 353, 357 не определяют; вместо этого загрязнение может быть измерено при каждом обороте выхода 102 вокруг оси 134 без запуска и остановки перемещения выхода 102, что позволяет уменьшить механическое напряжение, оказываемое на компоненты.
Вариации конфигурации электромагнитных выхода и входа
[119] Ниже приведено описание вариации системы 4100 для определения расстояния со ссылкой на фиг. 14(a). В данной вариации электромагнитный выход 4102 содержит отражатель, например, зеркало. Электромагнитный выход 4102 перенаправляет луч электромагнитного излучения от излучателя 152 с обеспечением первого луча электромагнитного излучения 104. Электромагнитный вход 4108 также содержит отражатель, который также может представлять собой зеркало. Электромагнитный вход 4108 перенаправляет электромагнитное излучение 110 по направлению к датчику 154 электромагнитного излучения. В данном примере реализации использование одного или множества отражателей в совокупности с геометрией боковых стенок 122 обеспечивает путь 124 второго луча 126, позволяющий избежать маскировки датчика 154.
[120] В другой вариации отражатели электромагнитного входа 4108 и электромагнитного выхода 4102 образованы общим отражателем.
[121] Ниже приведено описание другой вариации системы 5100 для определения расстояния со ссылкой на фиг. 14(b). В данной вариации электромагнитный выход 5102 и электромагнитный вход 5108 опираются с возможностью поворота и управляются вторым опорным элементом 5140 и первым опорным элементом 5140. В данной вариации электромагнитный выход 5102 обеспечивает первый луч 104, падающий на боковую стенку 122 под углом, равным или по существу приближенным к нормали поверхности. Образованное в результате зеркальное отражение 128 образует второй луч 126 на пути 124 второго луча, направленный обратно к электромагнитному выходу 5102. Тем не менее, в данной конфигурации электромагнитный вход 5108 расположен вне пути 124 второго луча во избежание или с целью уменьшения влияния зеркального отражения на электромагнитный вход 5108.
Вариация боковой стенки кожуха
[122] Ниже приведено описание вариаций системы 6100, 7100, 8100 для определения расстояния, имеющих различные конфигурации боковой стенки, включая внешнюю боковую стенку и внутреннюю боковую стенку, со ссылкой на фиг. 15(a)-15(c).
[123] Согласно фиг. 15(a), система 6100 определения расстояния содержит кожух 120 с внутренней боковой стенкой 6122a, окружающей электромагнитные выход 102 и вход 108. В свою очередь, внешняя боковая стенка 6122b окружает внутреннюю боковую стенку 6122a. В данном примере реализации между внешней боковой стенкой 6122b и внутренней боковой стенкой 6122a задана полость 6131.
[124] Внешняя боковая стенка 6122b и внутренняя боковая стенка 6122a могут быть выполнены из различных материалов. Преимущество использования различных материалов заключается в возможности комбинирования различных соответствующих свойств материалов. Например, внешняя боковая стенка 6122b может быть выполнена из материала, обладающего высокой ударопрочностью, с целью обеспечения ударопрочного барьера. Внутренняя боковая стенка 6122a может быть выполнена из материала, способного выдерживать высокое давление (такое как по меньшей мере 100 кПа, или по меньшей мере 500 кПа, или по меньшей мере 1000 кПа). В одном из примеров реализации внешняя боковая стенка 6122b выполнена из стекла для обеспечения сопротивления царапанию. Внутренняя боковая стенка 6122a может быть выполнена из прозрачного пластика, такого как поликарбонат, для обеспечения устойчивого к давлению барьера. Соответственно, комбинация внешней боковой стенки 6122b и внутренней боковой стенки 6122a может быть выполнена с возможностью соответствия одному или множеству пользовательским требованиям, которые могут включать соответствие промышленным стандартам, приведенным в настоящем описании.
[125] В другой вариации внешняя боковая стенка 6122b и внутренняя боковая стенка 6122a могут быть выполнены из одного материала с одинаковой или различной толщиной стенки. В одном из примеров реализации внешняя и внутренняя боковые стенки 6122b, 6122a выполнены из стекла. Выполнение двух боковых стенок может иметь преимущество, заключающееся в том, что внешняя боковая стенка 6122b может представлять собой "жертвенный" барьер, который может быть заменен по требованию без подвергания электромагнитных выхода 102 и входа 108 воздействию загрязнителей. Указанная конфигурация может обладать особым преимуществом в случае осуществления замены в полевых условиях, таких как запыленная среда, зачастую имеющая место в шахтах.
[126] Преимущество заключается в том, что полость 6131 между внешней боковой стенкой 6122b и внутренней боковой стенкой 6122a может обеспечивать подушку для смягчения воздействия удара по внешней боковой стенке 6122b на внутреннюю боковую стенку 6122a и компоненты расположенной внутри системы. Например, внешняя боковая стенка 6122b может поглощать удар, в результате которого стенка деформируется. Однако, полость 6131 обеспечивает пространство, удаленное от внутренней боковой стенки 6122a, в результате чего сила удара не переносится непосредственно на поверхность внутренней боковой стенки 6122a.
[127] Другой пример реализации системы 7100 для определения расстояния показан на фиг. 15(b) и содержит внутреннюю боковую стенку 7122a, выполненную из жесткого материала и окруженную внешней боковой стенкой, выполненной в виде защитной пленки 7122b. Защитная пленка 7122b может представлять собой отслаивающуюся прозрачную пластиковую пленку, которая может быть удалена и заменена в случае царапания, другого повреждения или загрязнения пленки. Преимущество заключается в том, что защитная пленка 7122b может обеспечивать дешевый и легко заменимый "жертвенный" барьер для обеспечения незатруднительного сохранения прозрачности кожуха 120. Защитная пленка 7122b может содержать полиэфирные пленки, сходные с используемыми на лобовых стеклах гоночных автомобилей, такие как пленки, изготовляемые компанией MADICO, Inc., Уоберн, штат Массачусетс, США, под обозначениями изделий LCL-600-XSR и LCL-800-XSR, а также пленки толщиной 5-7 мм, поставляемые указанной компанией.
[128] Еще один пример реализации системы 8100 для определения расстояния показан на фиг. 15(c) и содержит внутреннюю боковую стенку 8122a, ламинированную или прикрепленную к внешней боковой стенке 8122b посредством слоя 8123 адгезива. Слой адгезива может содержать жидкую смолу, выполненную из пластикового полимера, изготовленного на акриловой или силиконовой основе. Указанный вид полимера может содержать фотоинициаторы, выполненные с возможностью быстрого отверждения нанесенной смолы при подвергании воздействию ультрафиолетового излучения. Один из подобных адгезивов может представлять собой адгезив UV CURE 7155 компании Epoxies Etc.,линейка продукции Deco-Coat, 21 Starline Way, Крэнстон, штат Род-Айленд,02921. В одном из примеров агент-адгезив содержит поливинилбутираль (ПВБ). Предпочтительно, слой адгезива снижает склонность кожуха к образованию нескольких отражений источника электромагнитного излучения и степень образования указанных отражений, а также обеспечивает ударопрочный барьер между внутренней и внешней стенками.
[129] В типовом примере реализации кожух 120 содержит стеклянный цилиндр с двойной стенкой, состоящий из внутренней и внешней боковых стенок, 8122a и 8122b, выполненных из стеклянных цилиндров, ламинированных друг с другом посредством ПВБ (поливинилбутираля) 8123 или другого подходящего ламинирующего вещества или адгезива.
[130] Внешняя и внутренняя боковые стенки 6122b, 6122a могут образовывать множество соответственных точек отражения и преломления света, такие как точки 6128a, 7128a, 8128a на внутренней боковой стенке 6122a, 7122a, 8122a, и точки 6128b, 7128b, 8128b на внешней боковой стенке 6122b, 7122b, 8122b. Регулировка указанных воздействий может быть выполнена путем калибровки и/или вычисления, сходных с вышеописанными, с учетом множества отражений и преломлений. Кроме того, следует также учитывать отражение и преломление, вызываемые слоем 8123 адгезива.
Другие характеристики
[131] В одной форме электрические и электронные компоненты (включая лазеры, двигатели и контроллер) внутри кожуха 120 устройства 100 для определения расстояния не потребляют более 6 Вт мощности с целью уменьшения вероятности воспламенения вследствие нагрева системы для определения расстояния. Также следует понимать, что максимальные значения энергопотребления могут варьироваться в зависимости от соответствующих стандартов национальной юрисдикции.
[132] Предпочтительно, система для определения расстояния соответствует одному или множеству (более предпочтительно двум или более) из международных стандартов МЭК (IEC) 60079-0; МЭК (IEC) 60079-1; стандартов США: ANSI/UL1203: 2006, стандартов Великобритании BS EN 60079-1: 2007; и стандартов Австралии AS60079. 1: 2007. В предпочтительном примере реализации система для определения расстояния также соответствует стандартам газов группы 1 (например, для среды добычи угля).
[133] Специалисту будет очевидно, что могут быть осуществлены многочисленные вариации и/или модификации вышеописанных примеров реализации без выхода за пределы общего широкого объема настоящего изобретения. Таким образом, представленные примеры реализации следует во всех отношениях интерпретировать как иллюстративные, но не ограничивающие.
Области применения
Система для определения расстояния по настоящему изобретению особенно пригодна для использования в среде повышенной огнеопасности или взрывоопасности, в особенности при воздействии на среду источника воспламенения. В одном из примеров реализации систему для определения расстояния используют для определения расстояния до объекта внутри шахты, в частности внутри угольной шахты. Атмосферная среда внутри угольных шахт может содержать взрывчатую и/или горючую смесь угольной пыли, метана и кислорода.
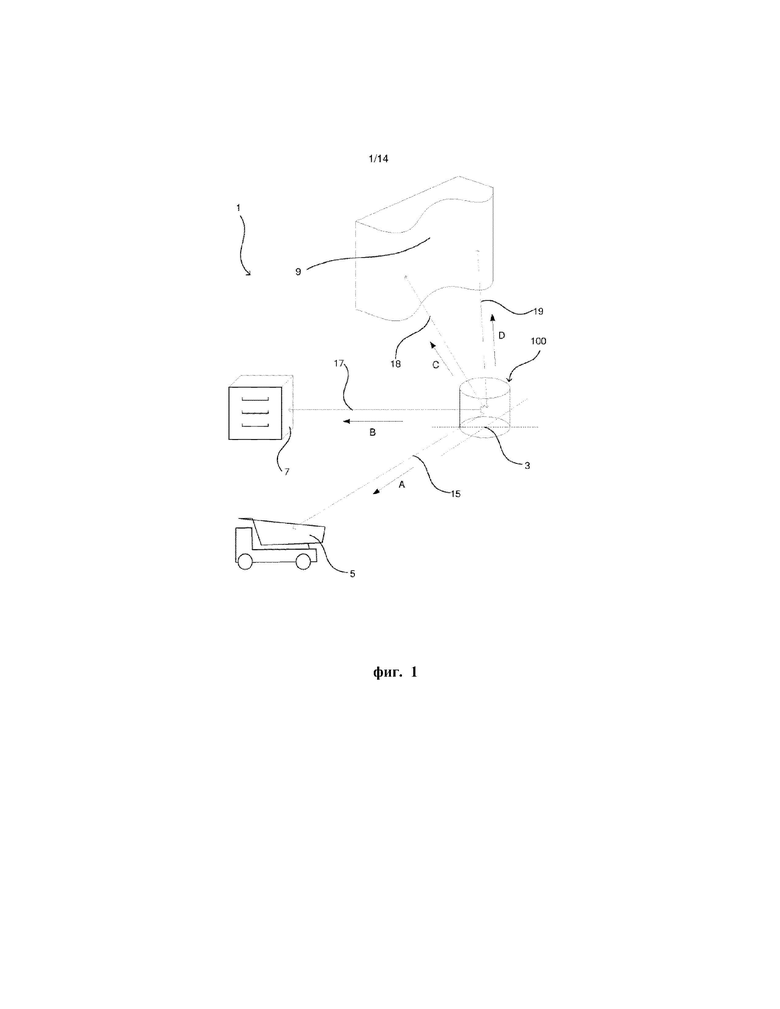
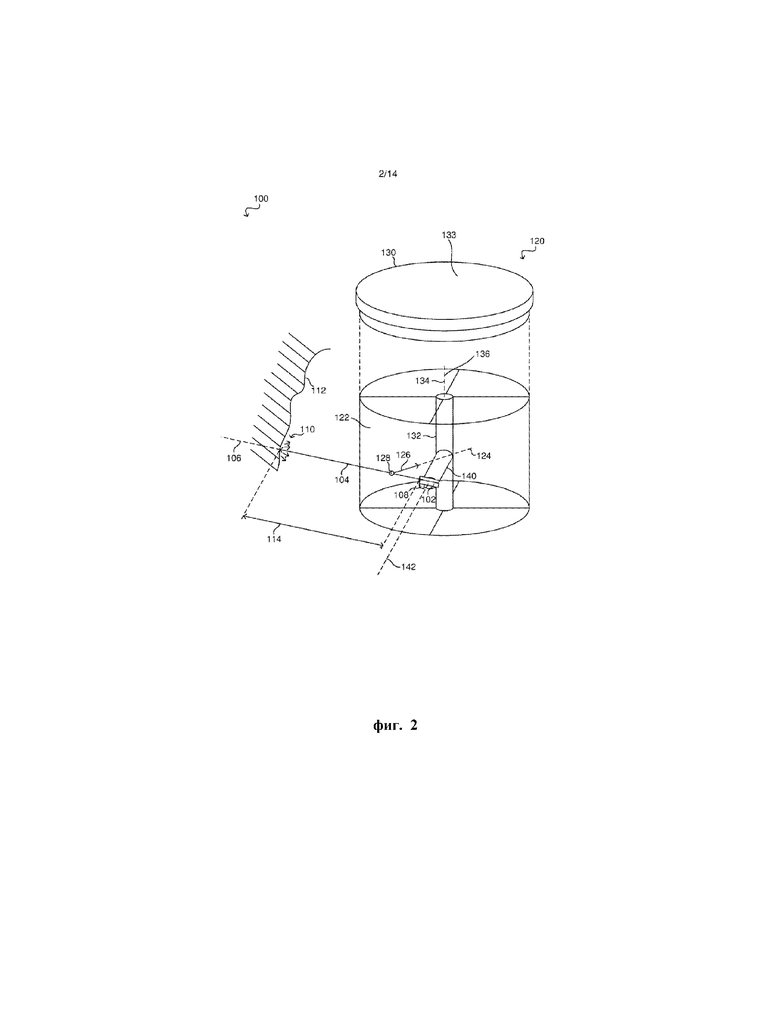
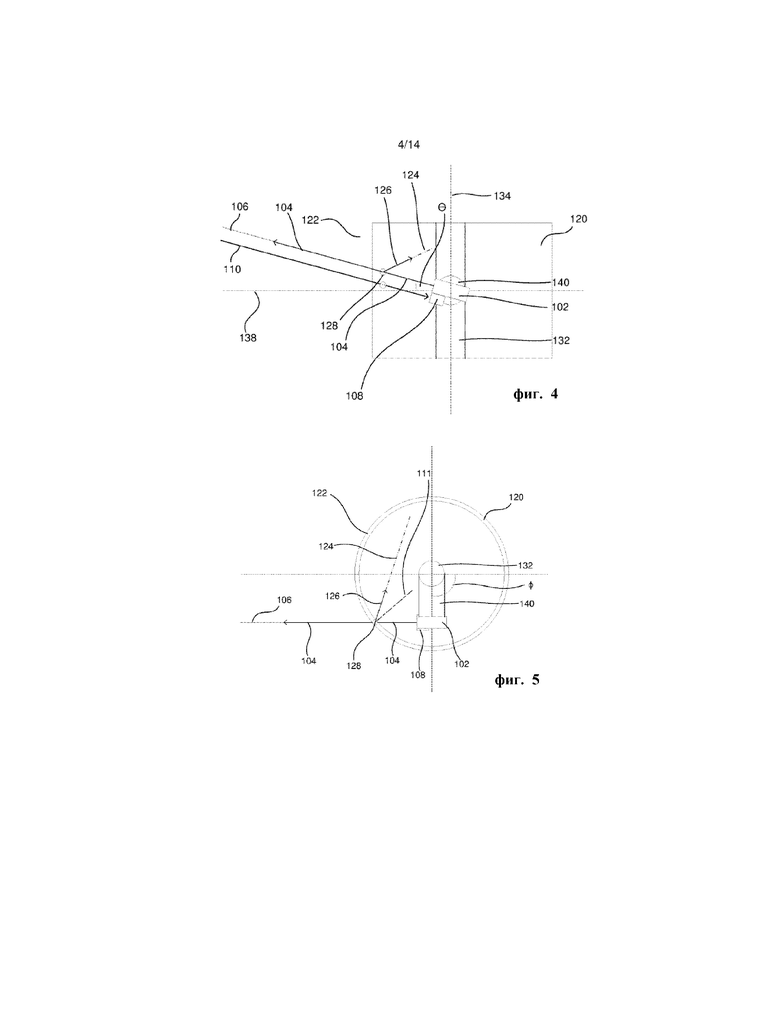
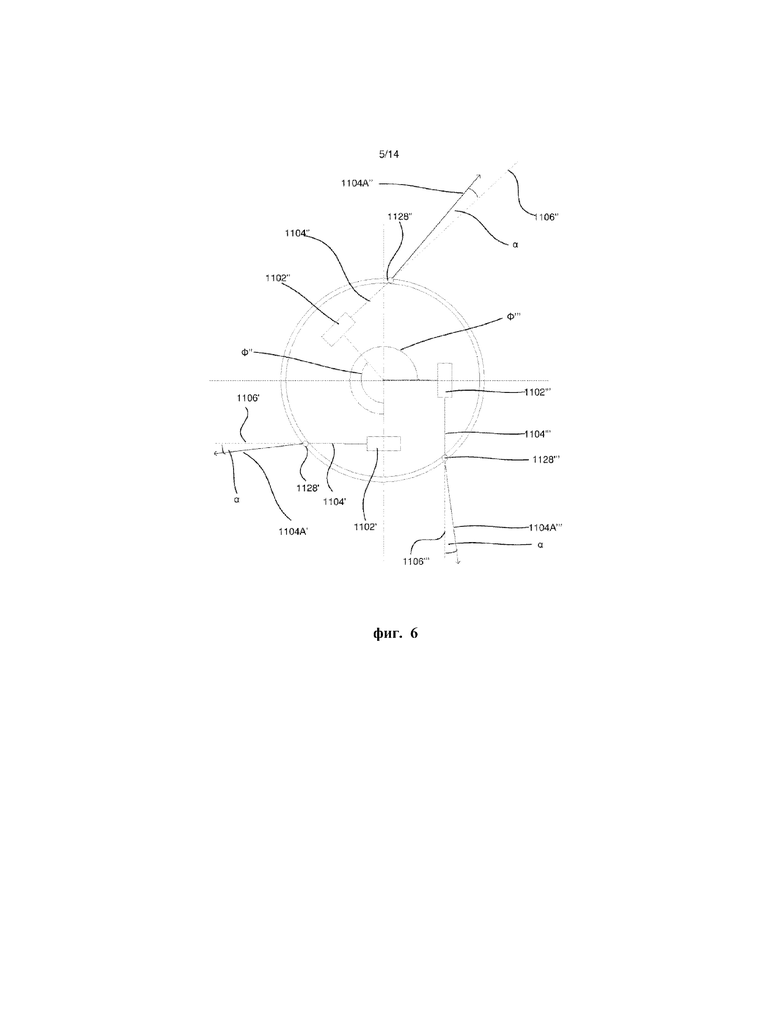
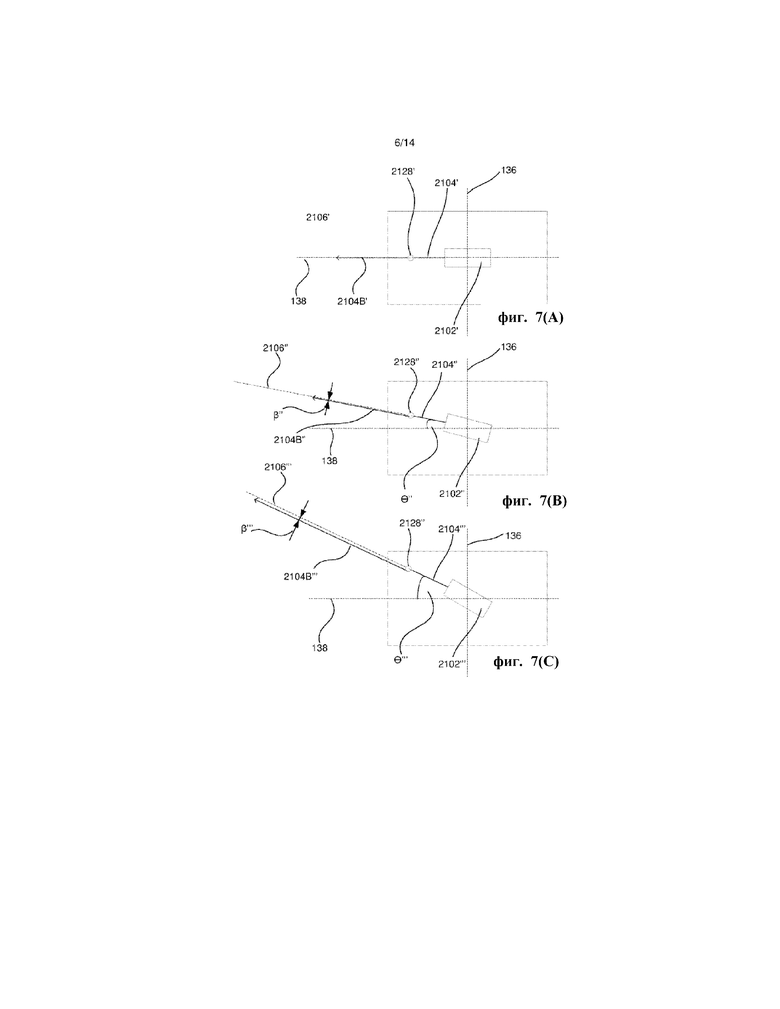
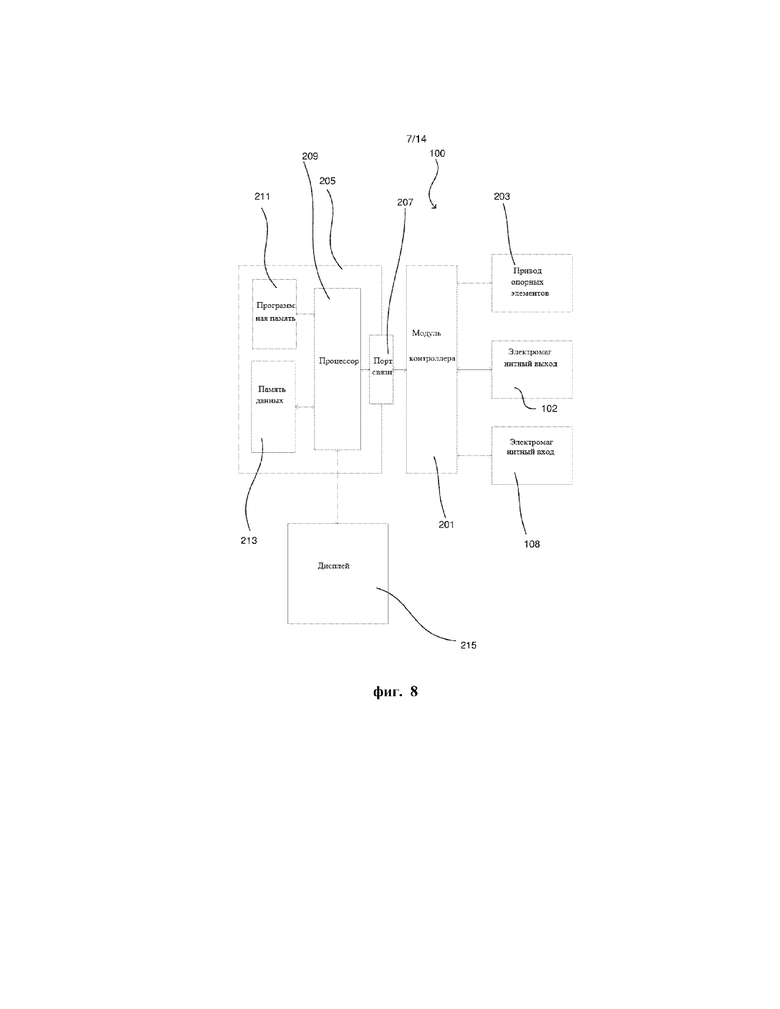
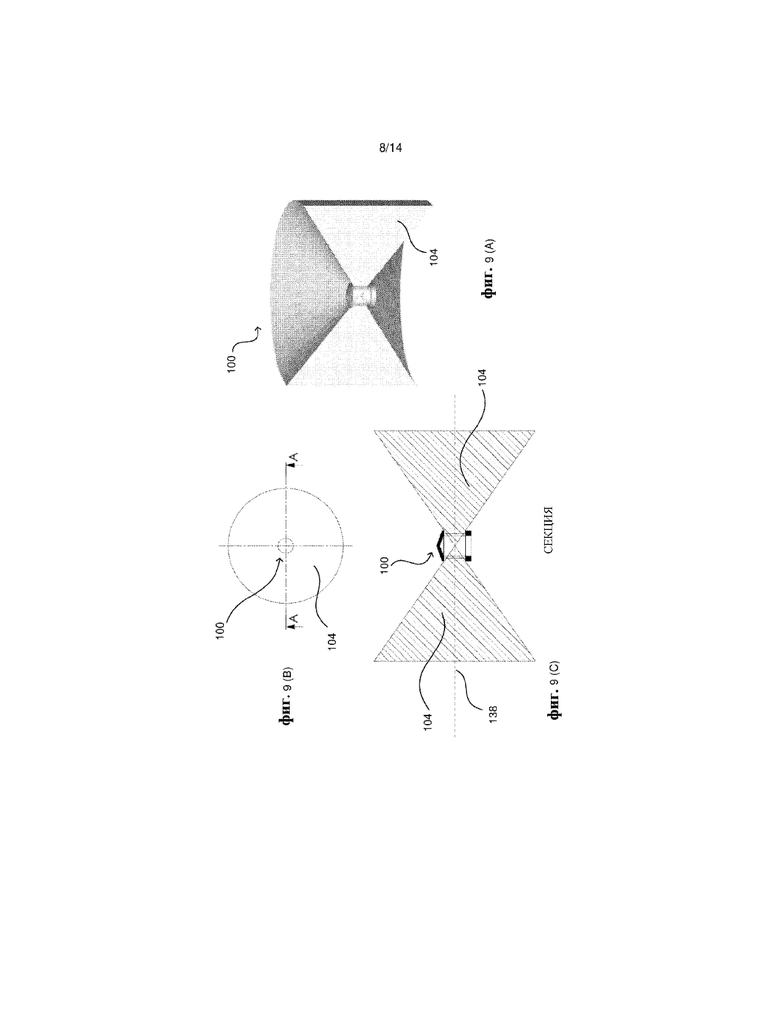
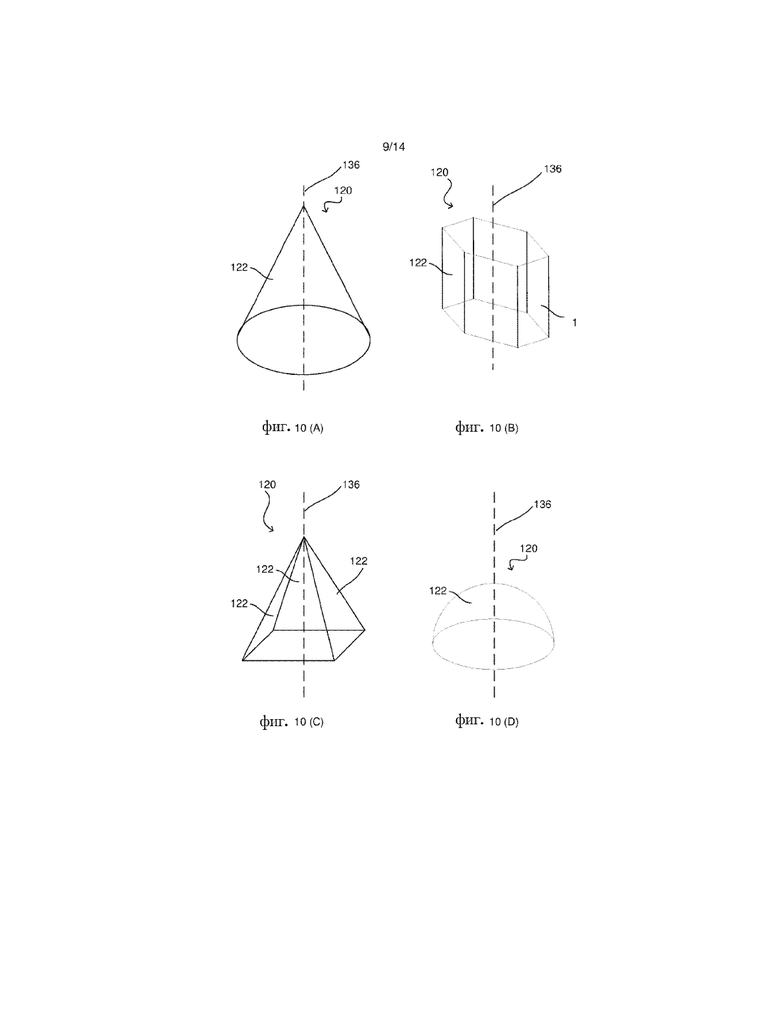
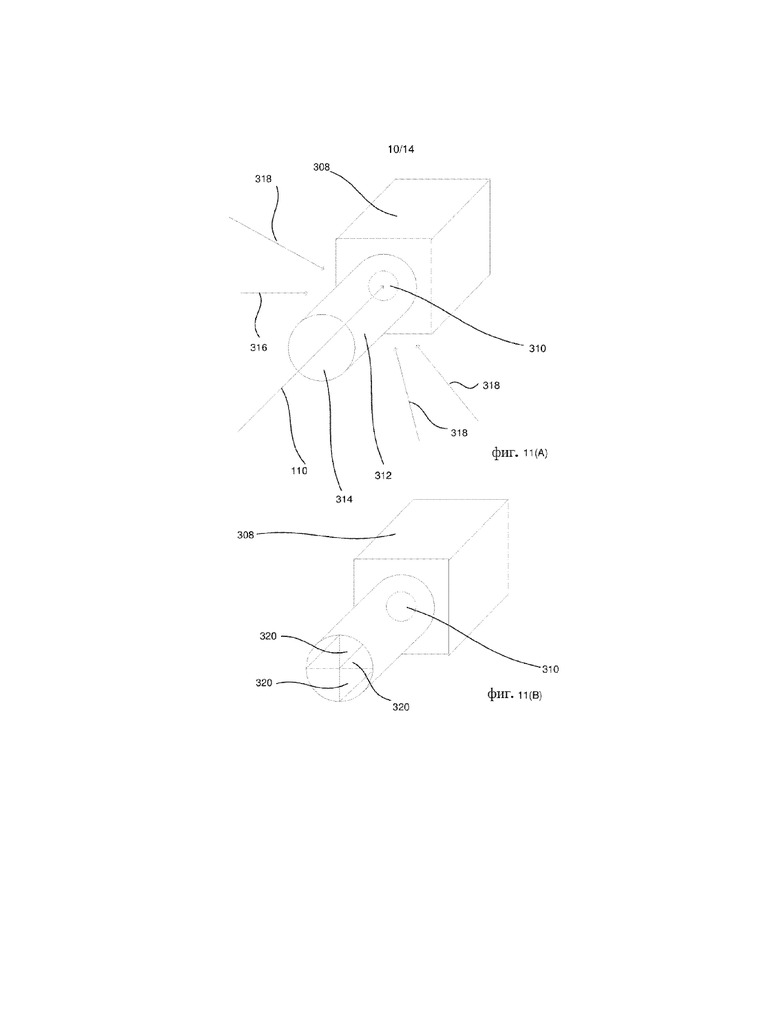
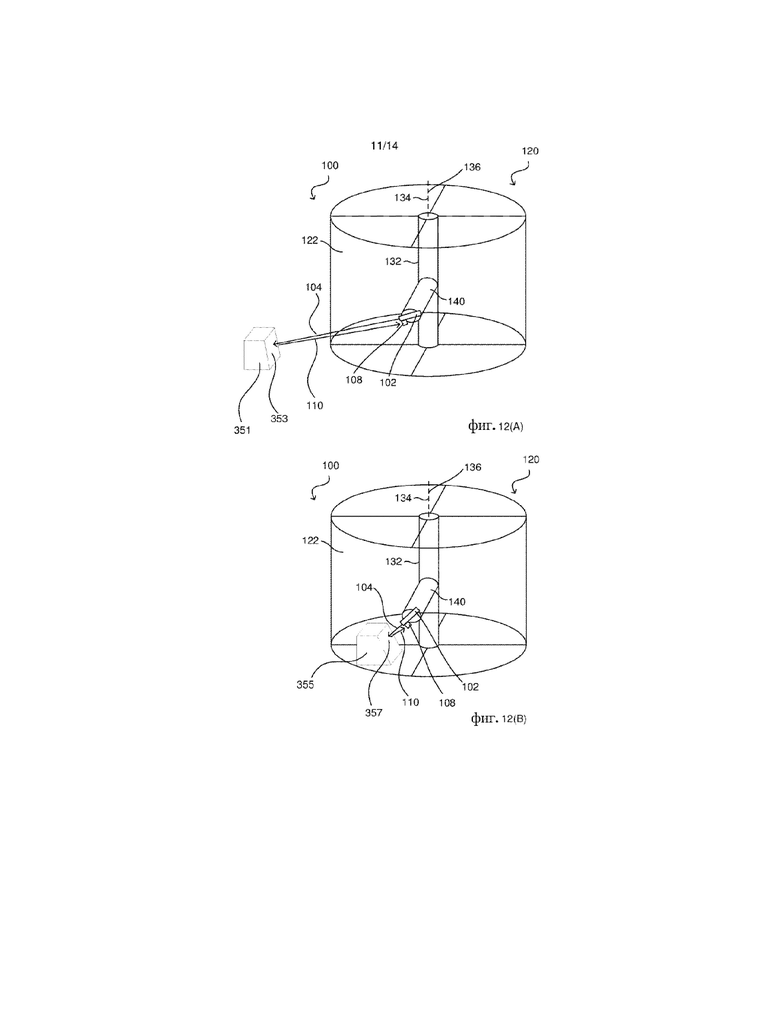
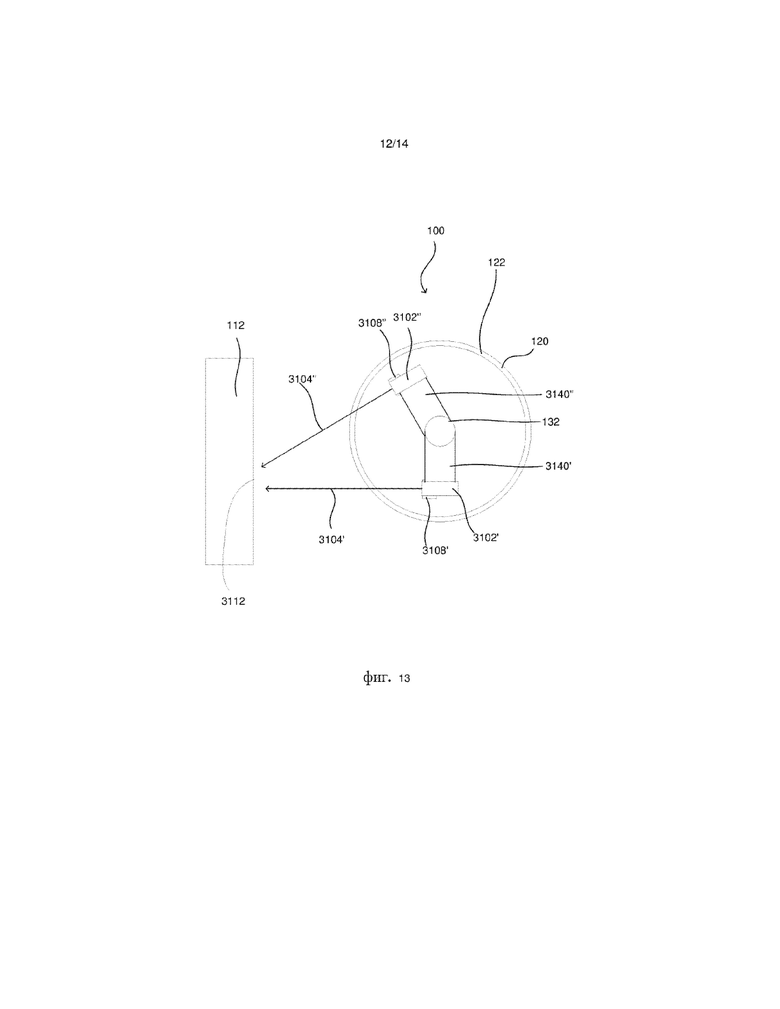
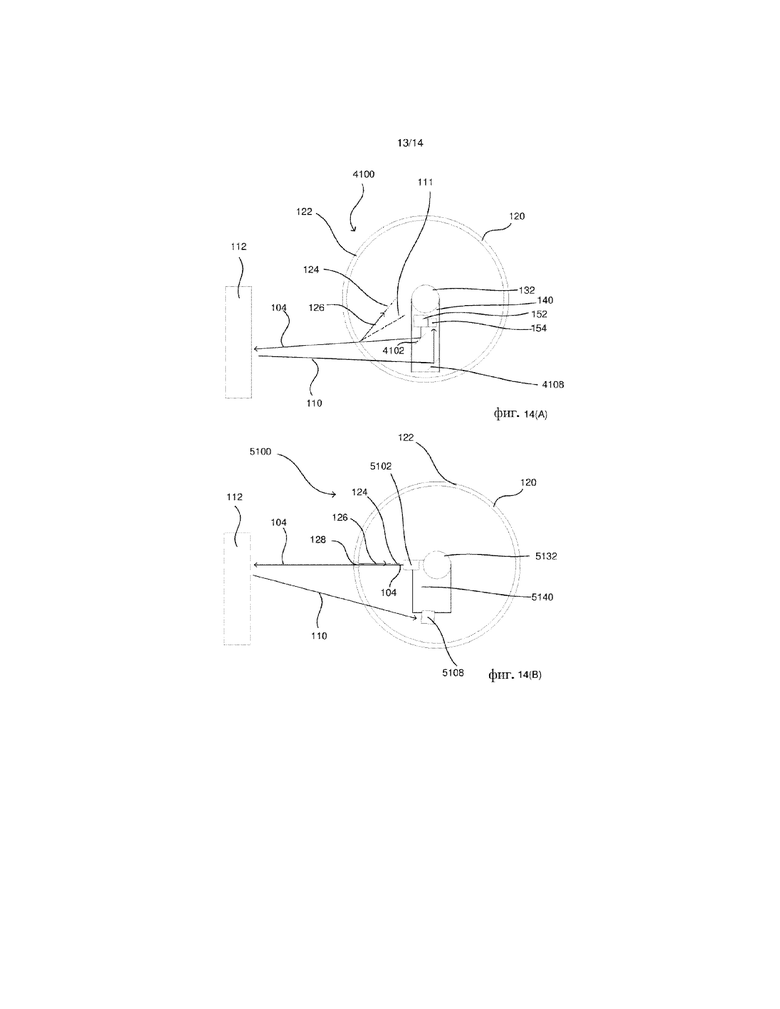
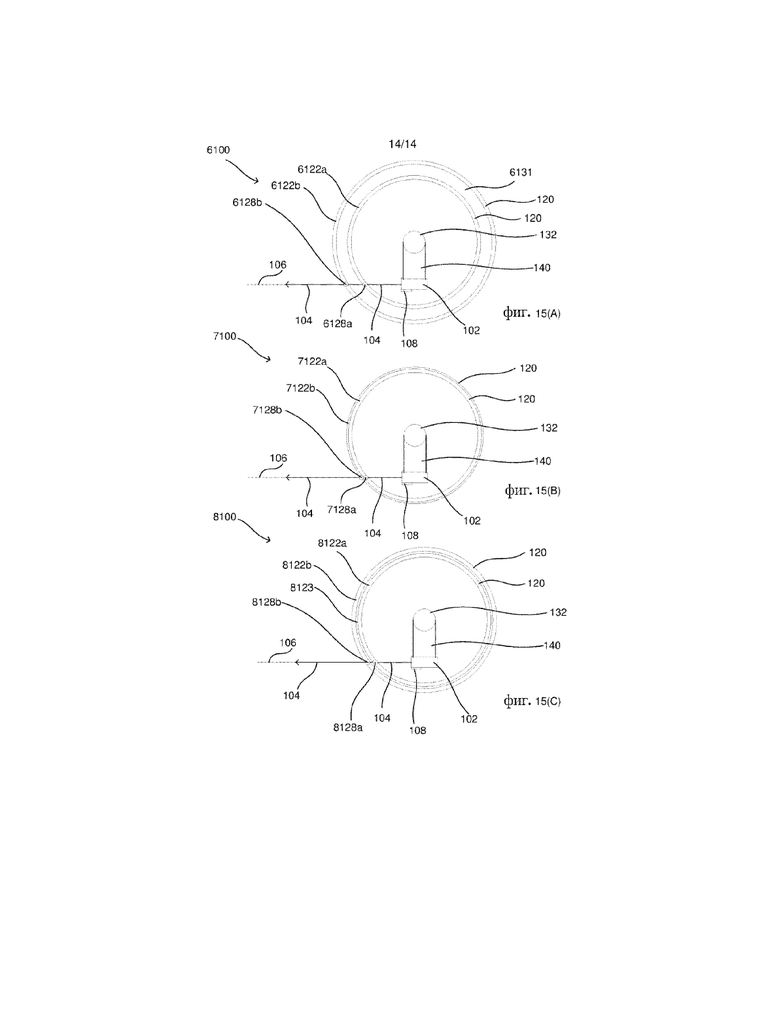
Система для определения расстояния содержит электромагнитный выход для обеспечения первого луча электромагнитного излучения, электромагнитный вход для приема отраженного от объекта первого луча для определения расстояния от объекта, кожух, содержащий проницаемую для электромагнитного излучения боковую стенку, окружающую центральную ось кожуха, и первый опорный элемент, выполненный с возможностью поворота внутри кожуха вокруг первой оси поворота, соосной с центральной осью. Электромагнитные выход и вход размещены внутри кожуха и опираются на первый опорный элемент, поворот которого управляет первым лучом и электромагнитным входом для приема отраженного от объекта первого луча. Электромагнитный выход смещен от центральной оси таким образом, что путь первого луча до боковой стенки не пересекает центральную ось и что электромагнитный вход расположен вне пути второго луча, заданного зеркальным отражением первого луча от боковой стенки. Угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, превышает 5 градусов. Технический результат - уменьшение помех из-за зеркального отражения луча от боковой стенки кожуха. 11 н. и 15 з.п. ф-лы, 27 ил.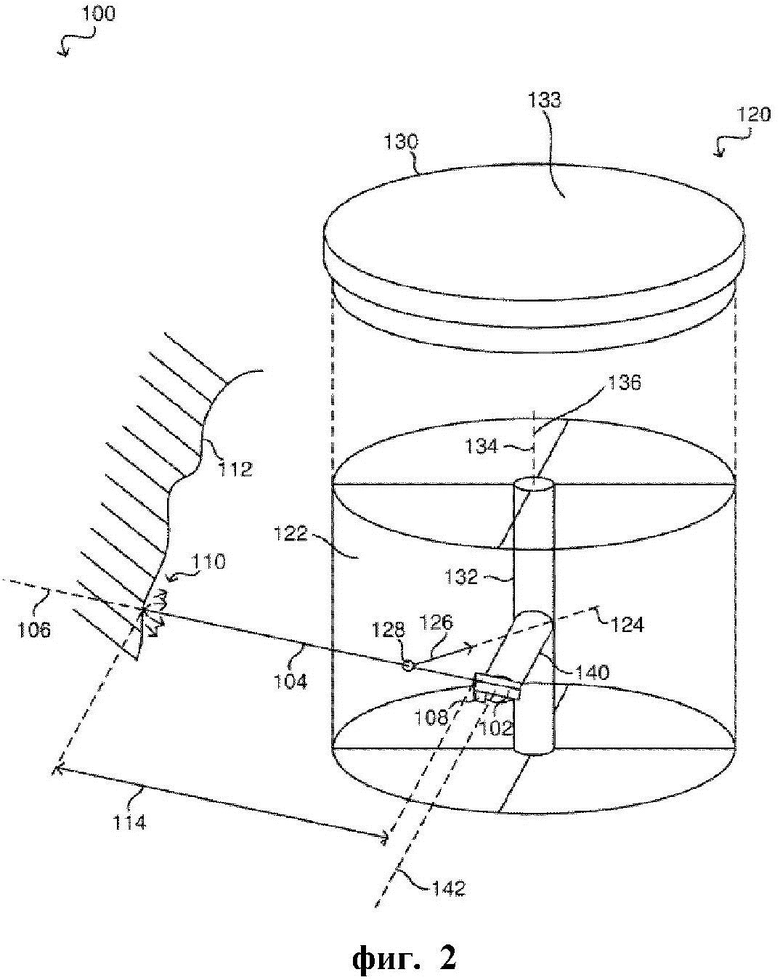
1. Система для определения расстояния, содержащая:
- электромагнитный выход для обеспечения первого луча электромагнитного излучения по пути первого луча;
- электромагнитный вход для приема отраженного электромагнитного излучения первого луча от объекта для определения расстояния системы для определения расстояния от объекта; и
- кожух, содержащий боковую стенку, окружающую центральную ось кожуха, причем боковая стенка проницаема для электромагнитного излучения, обеспечиваемого электромагнитным выходом, и
- первый опорный элемент, выполненный с возможностью поворота внутри кожуха вокруг первой оси поворота, при этом первая ось поворота соосна с центральной осью,
причем электромагнитный выход и электромагнитный вход размещены внутри кожуха и опираются на первый опорный элемент (132) таким образом, что поворот первого опорного элемента: управляет первым лучом, обеспеченным электромагнитным выходом, и управляет электромагнитным входом для приема отраженного электромагнитного излучения первого луча от объекта, и
при этом электромагнитный выход смещен от центральной оси таким образом, что путь первого луча от электромагнитного выхода до боковой стенки не пересекает центральную ось и что электромагнитный вход расположен вне пути второго луча электромагнитного излучения, заданного зеркальным отражением первого луча от боковой стенки, и
при этом угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, превышает 5 градусов.
2. Система для определения расстояния по п. 1, в которой кожух также содержит один или множество элементов, предотвращающих воспламенение газа вне кожуха, вызываемое инициаторами воспламенения изнутри кожуха.
3. Система для определения расстояния по п. 2, в которой один или множество элементов содержат уплотнительные элементы, которые, в совокупности с боковой стенкой, изолируют внутреннюю часть кожуха от внешней среды вне кожуха таким образом, что один или множество уплотнительных элементов предотвращают воспламенение газа вне кожуха, вызываемое инициаторами воспламенения изнутри кожуха.
4. Система для определения расстояния по любому из пп. 1-3, также содержащая:
- второй опорный элемент для обеспечения опоры между электромагнитным выходом и первым опорным элементом, причем второй опорный элемент выполнен с возможностью поворота вокруг второй оси поворота, и причем поворот второго опорного элемента обеспечивает управление первым лучом, обеспеченным электромагнитным выходом.
5. Система для определения расстояния по п. 4, в которой вторая ось поворота перпендикулярна первой оси поворота.
6. Система для определения расстояния по любому из пп. 1-5, также содержащая:
- модуль контроллера для управления первым лучом с обеспечением множества пространственных ориентаций луча с целью обеспечения множества определений расстояния для объекта(-ов) в окружающей среде.
7. Система для определения расстояния по п. 6, также содержащая:
- процессор для выработки модели изображения окружающей среды в трех измерениях на основании множества определений расстояния.
8. Система для определения расстояния по любому из предшествующих пунктов, в которой электромагнитный выход содержит лазерный излучатель для обеспечения первого луча в виде лазерного излучения, причем электромагнитный вход содержит светочувствительный элемент для приема отраженного от объекта лазерного излучения.
9. Система для определения расстояния по любому из пп. 1-8, также содержащая:
- лазерный излучатель для обеспечения первого луча в виде лазерного излучения,
причем электромагнитный выход содержит первый отражатель для перенаправления первого луча на путь первого луча.
10. Система для определения расстояния по п. 9, также содержащая:
- светочувствительный элемент для обнаружения отраженного от объекта лазерного излучения,
причем электромагнитный вход содержит второй отражатель для перенаправления отраженного лазерного излучения по направлению к светочувствительному элементу.
11. Система для определения расстояния по любому из предшествующих пунктов, в которой угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, меньше критического угла относительно боковой стенки.
12. Система для определения расстояния по любому из предшествующих пунктов, в которой боковая стенка представляет собой цилиндрическую боковую стенку.
13. Установка для определения расстояния, предназначенная для использования внутри огнеупорного кожуха, содержащего цилиндрическую боковую стенку, окружающую центральную ось кожуха, причем установка для определения расстояния содержит:
- электромагнитный выход для обеспечения первого луча электромагнитного излучения по пути первого луча сквозь цилиндрическую боковую стенку, которая является проницаемой для электромагнитного излучения;
- электромагнитный вход для приема отраженного электромагнитного излучения первого луча от объекта для определения расстояния установки для определения расстояния от объекта;
- первый опорный элемент, выполненный с возможностью поворота вокруг первой оси поворота, при этом первая ось поворота соосна с центральной осью,
причем электромагнитный выход и электромагнитный вход опираются на первый опорный элемент, а поворот первого опорного элемента: управляет первым лучом, обеспеченным электромагнитным выходом, и управляет электромагнитным входом для приема отраженного электромагнитного излучения первого луча от объекта, и
причем электромагнитный выход установлен со смещением относительно центральной оси таким образом, что путь первого луча от электромагнитного выхода до цилиндрической боковой стенки не пересекает центральную ось, в результате чего при нахождении установки для определения расстояния внутри кожуха, когда первая ось поворота соосна центральной оси цилиндрической боковой стенки, электромагнитный вход расположен вне пути второго луча, вызванного зеркальным отражением первого луча от цилиндрической боковой стенки, и
при этом угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, превышает 5 градусов.
14. Установка для определения расстояния по п. 13, также содержащая:
- второй опорный элемент для обеспечения опоры между электромагнитным выходом и первым опорным элементом, причем второй опорный элемент выполнен с возможностью поворота вокруг второй оси поворота, причем поворот второго опорного элемента обеспечивает управление первым лучом, обеспеченным электромагнитным выходом,
и причем вторая ось поворота перпендикулярна первой оси поворота.
15. Система для определения расстояния по любому из пп. 1-12, соответствующая одному или множеству из международных стандартов IEC 60079-0; IEC 60079-1; стандартов США: ANSI/UL1203: 2006, стандартов Великобритании BS EN 60079-1: 2007; и стандартов Австралии AS60079-1: 2007.
16. Система для определения расстояния, содержащая:
- лазерный излучатель для обеспечения первого луча лазерного излучения по пути первого луча;
- светочувствительный элемент для приема отраженного от объекта лазерного излучения для определения расстояния системы для определения расстояния от объекта;
- кожух, содержащий цилиндрическую боковую стенку, окружающую центральную ось кожуха, причем боковая стенка проницаема для излучения, обеспечиваемого лазерным излучателем, причем кожух содержит один или множество элементов, предотвращающих воспламенение газа вне кожуха, вызываемое инициаторами воспламенения изнутри кожуха; и
первый опорный элемент, выполненный с возможностью поворота внутри кожуха вокруг первой оси поворота, при этом первая ось поворота соосна с центральной осью, причем лазерный излучатель и светочувствительный элемент опираются на первый опорный элемент таким образом, что поворот первого опорного элемента: управляет первым лучом, обеспеченным лазерным излучателем, и управляет электромагнитным входом для приема отраженного лазерного излучения первого луча от объекта; и
причем лазерный излучатель и светочувствительный элемент размещены внутри кожуха, при этом лазерный излучатель расположен смещенным от центральной оси таким образом, что путь первого луча от лазерного излучателя до боковой стенки не пересекает центральную ось, и что светочувствительный элемент расположен вне пути второго луча лазерного излучения, заданного зеркальным отражением первого луча от цилиндрической боковой стенки, и
при этом угол падения между путем первого луча и поверхностью, нормальной относительно боковой стенки, превышает 5 градусов.
17. Система для определения расстояния по п. 16, также содержащая контроллер для
наведения первого луча по направлению к отражателю;
определения значения интенсивности, указывающего на интенсивность света, отраженного от отражателя и принятого светочувствительным элементом; и
определения уровня загрязнения частицами угольной пыли на основании значения интенсивности.
18. Применение системы для определения расстояния по любому из пп. 1-12 и 15 для определения расстояния от объекта внутри закрытой среды.
19. Применение системы для определения расстояния по любому из пп. 16 и 17 для определения расстояния от объекта внутри закрытой среды.
20. Применение установки для определения расстояния по п. 13 или 14 для определения расстояния от объекта внутри закрытой среды.
21. Применение по любому из пп. 18-20, в котором закрытая среда представляет собой угольную шахту.
22. Способ моделирования поверхности одного или множества объектов, причем способ включает:
выполнение множества определений расстояния до одного или множества объектов с помощью системы по любому из пп. 1-12 и 15,
определение ориентации одного или более объектов относительно точки(-ек) наблюдения и данных о местоположении точки(-ек) наблюдения,
построение карты поверхности одного или более объектов на основе определений расстояния, ориентации и данных о местоположении.
23. Способ моделирования поверхности угольного забоя, причем способ включает:
выполнение множества определений расстояния до множества точек на угольном забое с помощью системы по любому из пп. 1-12 и 15,
определение ориентации множества точек на угольном забое относительно точки(-ек) наблюдения и данных о местоположении точки(-ек) наблюдения, и
построение карты поверхности одного или более объектов на основе определений расстояния, ориентации и данных о местоположении.
24. Применение системы для определения расстояния по любому из пп. 1-12, 15 для осуществления множества определений расстояния от одного или множества объектов.
25. Применение системы для определения расстояния по любому из пп. 16 и 17 для осуществления множества определений расстояния от одного или множества объектов.
26. Применение установки для определения расстояния по п. 13 или 14 для осуществления множества определений расстояния от одного или множества объектов.
| US 2014029001 A1, 30.01.2014 | |||
| US 4003655 A, 18.01.1977 | |||
| US 2008002176 A1, 03.01.2008 | |||
| US 2012001743 A1, 05.01.2012 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ И СРЕДНЕГО РАЗМЕРА ЧАСТИЦ ПЫЛИ | 2012 |
|
RU2510498C1 |
| US 4557598 A1, 10.12.1985. | |||

