Изобретение относится к двигательным ракетным системам для малоразмерных космических аппаратов (МКА) и предназначено для использования в качестве маневрового двигателя с мультивекторной тягой при выполнении операций ориентации, стыковки, причаливания, самосборки и трансформации конструкций, создаваемых из МКА, классифицируемых как пикоспутники - весом менее 1000 грамм, фемтоспутники - весом менее 100 грамм и аттоспутники - весом менее 10 грамм.
Известна матричная ракетная двигательная система с индивидуальным цифровым управлением величиной тяги каждой двигательной ячейки для малоразмерных космических аппаратов, содержащая плоскую монолитную термостойкую диэлектрическую подложку с упорядоченной прямоугольной матричной структурой конусообразных микропор, заполненных твердым топливом, ранжированных по объему в пропорциях последовательных степеней числа два (1-2-4-8-16). На центры оснований конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажатые центрующими отверстиями шин строк и столбцов, нанесенных на поверхности монолитной термостойкой диэлектрической подложки и первой термостойкой диэлектрической мембраны, на которую наложена вторая термостойкая диэлектрическая мембрана со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, образующие двигательные ячейки, коммутатор адресов двигательных ячеек, первый и второй дешифраторы строк, дешифратор столбцов, дешифратор данных, блок памяти отработанных кодовых комбинаций, контроллер [1].
Недостатком известного технического решения является отсутствие возможности цифрового управления величинами разнонаправленных радиальных тяг, равномерно распределенных по окружности, охватывающей квадратный массив перпендикулярно направленных коллинеарных (параллельных) тяг, синхронизированных с радиальными тягами.
Известна реверсивная матричная ракетная двигательная система с индивидуальным цифровым управлением величиной тяги каждой реверсивной двигательной ячейки для малоразмерных космических аппаратов, содержащая плоскую монолитную термостойкую диэлектрическую подложку с упорядоченной прямоугольной матричной структурой конусообразных микропор, заполненных твердым топливом, с двухсторонней встречно направленной ориентацией вершин конусообразных микропор, ранжированных по объему в пропорциях последовательных степеней числа два (1-2-4-8-16). На центры оснований конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажатые центрующими отверстиями шин строк и столбцов первой и третей термостойких диэлектрических мембран, на которые наложены вторая и четвертая термостойкие диэлектрические мембраны со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, образующие реверсивные двигательные ячейки, коммутатор адресов двигательных ячеек, первый и второй дешифраторы строк, дешифратор столбцов, дешифратор данных, блок памяти отработанных кодовых комбинаций, контроллер [2].
Недостатком известного технического решения является отсутствие возможности цифрового управления величинами разнонаправленных радиальных тяг, равномерно распределенных по окружности, охватывающей квадратный массив перпендикулярно направленных коллинеарных (параллельных) тяг, синхронизированных с радиальными тягами.
Наиболее близким по технической сущности является реверсивная матричная ракетная двигательная система с индивидуальным цифровым управлением величиной тяги каждой реверсивной двигательной ячейки для малоразмерных космических аппаратов, содержащая плоскую монолитную термостойкую диэлектрическую подложку с упорядоченной прямоугольной матричной структурой конусообразных микропор, заполненных твердым топливом, с двухсторонней встречно направленной ориентацией вершин конусообразных микропор, ранжированных по объему в пропорциях последовательных степеней числа два (1-2-4-8-16…-n). На центры оснований конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажатые центрующими отверстиями шин строк и столбцов первой и третей термостойких диэлектрических мембран, на которые наложены вторая и четвертая термостойкие диэлектрические мембраны со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, образующие реверсивные двигательные ячейки, коммутатор адресов двигательных ячеек, первый и второй дешифраторы строк, дешифратор столбцов, дешифратор данных, блок памяти отработанных кодовых комбинаций, блок памяти альтернативных кодовых комбинаций, контроллер [3].
Недостатком известного технического решения является отсутствие возможности цифрового управления величинами разнонаправленных радиальных тяг, равномерно распределенных по окружности, охватывающей квадратный массив перпендикулярно направленных коллинеарных (параллельных реверсивных) тяг, синхронизированных с радиальными тягами.
Отличие предлагаемого технического решения от вышеизложенных заключается в ведении кольцеобразной монолитной термостойкой диэлектрической подложки с упорядочено расположенными по ее внешней боковой кольцевой поверхности конусообразными микропорами с радиальной ориентацией всех продольных осей на центр круглой монолитной термостойкой диэлектрической подложки с квадратным массивом реверсивных двигательных ячеек, имеющей диаметр, равный внутринему диаметру кольцеобразной монолитной термостойкой диэлектрической подложки, что позволило создать единую компактную мультивекторную цифровую радиально-реверсивную двигательную систему с перестраиваемыми по величине и направлению векторами тяги в диапазоне изменения направления от 0 до 360° градусов вокруг управляемых параллельных реверсивных тяг синхронизированных с радиальными тягами. Это повышает скорость выполнения сложного маневра по нескольким координатам одной двигательной системой с минимальным расходом твердого топлива.
Введение третьего дешифратора строк позволило осуществить выбор любого сочетания включения нескольких сферических воспламенителей, детонирующих различные объемы зарядов твердого топлива с различными величинами тяги, расположенных на поверхности кольцевой подложки перпендикулярной поверхности круглой монолитной термостойкой диэлектрической подложке с реверсивными двигательными ячейками, что позволило осуществить мультивекторное управление прямыми, обратными и радиальными тягами одновременно или с различными интервалами времени.
Техническим результатом является возможность цифрового управления величинами разнонаправленных радиальных тяг, равномерно распределенных по окружности, охватывающей квадратный массив перпендикулярно направленных коллинеарных (параллельных реверсивных) тяг, синхронизированных с радиальными тягами.
Технический результат предложенного изобретения достигается совокупностью существенных признаков, а именно: мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов, содержащая плоскую монолитную термостойкую диэлектрическую подложку с упорядоченной прямоугольной матричной структурой конусообразных микропор, заполненных твердым топливом, с двухсторонней встречно направленной ориентацией вершин конусообразных микропор, ранжированных по объему в пропорциях последовательных степеней числа два, на центры оснований конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажаты центрующими отверстиями шин строк и столбцов первой и третей термостойких диэлектрических мембран, на которые наложены вторая и четвертая термостойкие диэлектрические мембраны со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, образующие реверсивные двигательные ячейки, коммутатор адресов двигательных ячеек, первый и второй дешифраторы строк, дешифратор столбцов, дешифратор данных, блок памяти отработанных кодовых комбинаций, блок памяти альтернативных кодовых комбинаций, контроллер, кольцеобразную монолитную термостойкую диэлектрическую подложку, две кольцеобразные термостойкие диэлектрические мембраны, третий дешифратор строк, причем плоская монолитная термостойкая диэлектрическая подложка, выполнена круглой с геометрически вписанной в ее окружность квадратной реверсивной двигательной матрицей, и вставлена в кольцеобразную монолитную термостойкую диэлектрическую подложку, третий дешифратор строк соединен с шинами строк, опоясывающими кольцеобразную монолитную термостойкую диэлектрическую подложку с упорядочено расположенными по ее внешней боковой кольцевой поверхности конусообразными микропорами, заполненными твердым топливом с радиальной ориентацией всех продольных осей конусообразных микропор вершинами на центр круглой монолитной термостойкой диэлектрической подложки с диаметром, равным внутреннему диаметру кольцеобразной монолитной термостойкой диэлектрической подложки, конусообразные поры которой ранжированы по объему в пропорциях последовательных степеней числа два, на центры оснований конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажатые центрующими отверстиями шин строк и столбцов, нанесенных на поверхность кольцеобразной монолитной термостойкой диэлектрической подложки и первой кольцеобразной термостойкой диэлектрической мембраны, над которой расположена вторая кольцеобразная термостойкая диэлектрическая мембрана со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, образующие радиальные двигательные ячейки, столбцовые шины которых соединены с выходом коммутатора адресов двигательных ячеек.
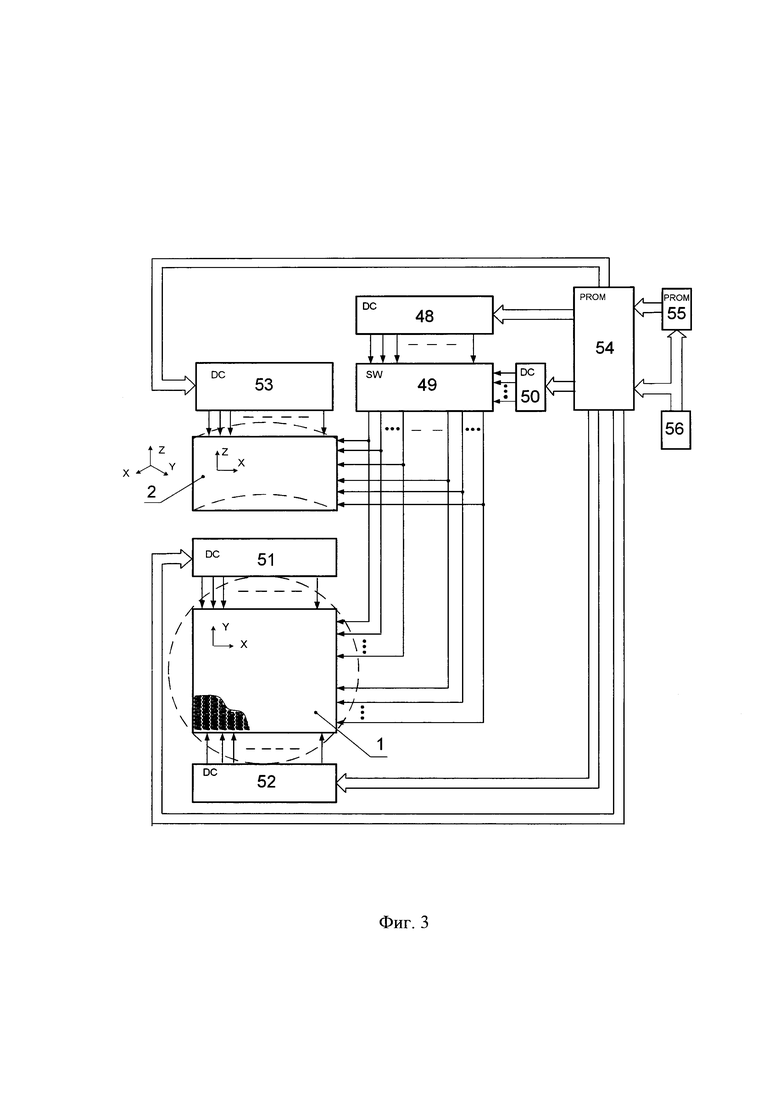
Сущность изобретения поясняется на фиг. 1, где представлена мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов. На фиг. 2 представлен выносной элемент А (10:1) в увеличенном масштабе и разрезе, поясняющий конструкцию мультивекторной матричной ракетной двигательной системы с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов. На фиг. 3 представлена блок-схема, осуществляющая функционирование мультивекторной матричной ракетной двигательной системы с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов.
Под используемым в тексте словами «аверс», «реверс», «гурт» понимается следующее: аверс - лицевая сторона круглой монолитной термостойкой диэлектрической подложки, противоположная стороне реверс. Реверс - оборотная сторона круглой монолитной термостойкой диэлектрической подложки, противоположная стороне аверс. Гурт - боковая поверхность монолитной термостойкой диэлектрической подложки. Элементы аверсной стороны генерируют энергию с прямым направлением векторов тяги, а элементы реверсной стороны генерируют энергию с обратным (противоположным) направлением векторов тяги. Под словосочетанием «реверсивная двигательная ячейка» - понимается наличие возможности у двигателя генерирования векторов тяги одновременно или поочередно в двух противоположных направлениях. Под словосочетанием «радиальные двигательные ячейки» - понимается следующее расположение: ячейки равномерно расположенные по кольцу (по боковой поверхности монолитной термостойкой диэлектрической подложки), продольные оси которых ориентированы на центр кольца, что позволяет изменять направление векторов тяги от 0 до 360° градусов. Мультивекторная двигательная система понимается как создающая массив векторов тяги с различными направлениями и величинами, изменяющимися по времени. Коллинеарные векторы тяги - векторы, лежащие на параллельных прямых (или на одной и той же прямой) независимо от их направления.
Под используемым в тексте словосочетанием «реверсивная двигательная ячейка» понимается следующее: реверсивная двигательная ячейка - это группа F элементов ar(i, j) двух двигательных квадратных матриц n×n с противоположно направленными векторами тяги, элементы которых находятся на пересечении строки ni с группой столбцов nj (количество которых равно количеству разрядов управляющего двоичного кода) и состоят из набора коммутируемых разнокалиберных зарядов (элементов) F={a1w1(i, j+1), a2w2(i, j+2), a3w4(i, j+3), a4w8(i, j+4), a5w16(i, j+5)} твердого топлива в пропорциях 1-2-4-8-16 где: аr - элемент реверсивной двигательной ячейки, r - номер ячейки (r=1, 2,…, N); wk - весовой коэффициент величины тяги элемента реверсивной двигательной ячейки с распределением величин в виде последовательных степеней числа два (k=1, 2, 4, 8, 16,…, (1⋅2h)), (h - максимальное количество разрядов управляющего двоичного кода). Каждому элементу двигательной ячейки в зависимости от объема (массы) размещенного твердого топлива (после его воспламенения) соответствует определенный весовой коэффициент wk величины тяги. В зависимости от управляющего кода, соответствующему определенному двоичному числу, происходит изменение величины тяги двигательной ячейки в интервале от 0 до 100% за счет суммирования выбранных двоичным кодом сочетаний дискретных величин тяг двигательных элементов, образующих двигательную ячейку. Шаг дискретизации (шаг квантования) изменения величины тяги и, соответственно, точность перемещения определяется количеством разрядов реверсивной двигательной ячейки, например, при пятиразрядной организации он составляет ~ 3.2% (100% /31), а для семи разрядной организации двигательной ячейки шаг составляет ~ 0.78% (100% / 127). Количество ранжированных зарядов твердого топлива (элементов) в каждой двигательной ячейки должно быть больше двух и равно максимальной величине двоичного разряда (пять разрядов для данного примера) требуемой точности перемещения МКА. Радиальная двигательная ячейка отличается от реверсивной тем, что плоская поверхность двигательной прямоугольной матрицы m×n изогнуто в кольцо, диаметр которого равен диаметру круглой монолитной термостойкой диэлектрической подложки 1, и все продольные оси двигательных ячеек направлены на центр круга, который также является центром квадратной двигательной матрицы, вписанной в круг (центр - точка пересечения диагоналей квадратной двигательной матрицы). Диагональ квадратной матрицы n×n равна диаметру круглой монолитной термостойкой диэлектрической подложки 1. Длина прямоугольной матрицы m×n, изогнутой в виде кольца, равна произведению длины диагонали квадратной матрицы на число π (пи). Высота боковой поверхности определяется количеством радиальных двигательных ячеек (от 1 до N), расположенных друг над другом, задаваемая в зависимости от соотношения количества двигательных реверсивных ячеек на круглой монолитной термостойкой диэлектрической подложке 1 и количеством радиальных двигательных ячеек на кольцеобразной монолитной термостойкой диэлектрической подложке 2, количество которых может быть как равно, так и не равно друг другу, в зависимости от максимально планируемого количества повторения тех или иных однотипных циклов стыковок МКА.
Мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов, фиг. 1, содержит круглую монолитную термостойкую диэлектрическую подложку 1, на которой размещены в виде квадратной матрицы реверсивные двигательные ячейки (позиции 3-33). По окружности боковой поверхности круглой монолитной термостойкой диэлектрической подложки 1 размещена кольцеобразная монолитная термостойкая диэлектрическая подложка 2, на боковой поверхности которой размещены радиальные двигательные элементы (позиции 34-47), образующие прямоугольную матрицу, опоясывающую круглую монолитную термостойкую диэлектрическую подложку 1. Продольные оси двигательных элементов, размещенных на круглой подложке, перпендикулярны продольным осям двигательных элементов, расположенных на кольцеобразной монолитной термостойкой диэлектрической подложке 2. Элементы (3-47) в увеличенном масштабе приведены на выносном элементе А (10:1), представленном на фиг. 2 (фрагмент вида с боку в разрезе). В нижней части фиг.1 показан один из вариантов крепления мультивекторной двигательной системы с цифровым управлением величиной и направлением тяги двигательных ячеек, например, с помощью телескопической штанги 57, выдвигающейся из корпуса (на безопасное расстояние от двигательных ячеек) малого космического аппарата (МКА) 58 после его вывода на орбиту, где: 14 - микропоры, образующие сопла на пересечении строк и столбцов квадратной матрицы (реверсивной матрицы) с аверсной стороны, 42 - микропоры, образующие сопла, расположенные по кольцу с наружной стороны кольцеобразной матрицы (изогнутой прямоугольной матрицы).
На выносном элементе А (10:1), фиг. 2, представлены элементы реверсивной двигательной ячейки расположенной на круглой монолитной термостойкой диэлектрической подложке и элементы радиальной двигательной ячейки расположенная на кольцеобразной монолитной термостойкой диэлектрической подложке, в разрезе, где: круглая монолитная термостойкая диэлектрическая подложка 1, кольцеобразная монолитная диэлектрическая термостойкая подложка 2. На лицевой стороне круглой монолитной термостойкой диэлектрической подложки 1 размещена первая конусообразная микропора 3, вторая конусообразная микропора 4, третья конусообразная микропора 5, четвертая конусообразная микропора 6, пятая конусообразная микропора 7, заполненные твердым топливом 8, (конусообразные микропоры 3, 4, 5, 6, 7 - калиброваны и ранжированы по объему соответственно в пропорциях 1-2-4-8-16), сферические воспламенители 9, вложенные в сквозные цилиндрические микропоры 10, расположенные на первой термостойкой диэлектрической мембране 11, на поверхности которой, обращенной к круглой монолитной термостойкой диэлектрической подложке 1, нанесена строковая шина 12, на второй термостойкой диэлектрической мембране 13 расположены сквозные конусообразные микропоры 14, и со стороны меньших диаметров оснований конусов нанесены первая столбцовая шина 15, вторая столбцовая шина 16, третья столбцовая шина 17, четвертая столбцовая шина 18, пятая столбцовая шина 19. На обратной стороне круглой монолитной термостойкой диэлектрической подложки 1 размещена шестая конусообразная микропора 20, седьмая конусообразная микропора 21, восьмая конусообразная микропора 22, девятая конусообразная микропора 23, десятая конусообразная микропора 24, заполненные твердым топливом 8, (конусообразные микропоры 20, 21, 22, 23, 24 - калиброваны и ранжированы по объему соответственно в пропорциях 1-2-4-8-16), сферические воспламенители 9, вложенные в сквозные цилиндрические микропоры 10, расположенные на третей термостойкой диэлектрической мембране 25, на поверхности которой, обращенной к монолитной термостойкой диэлектрической подложке 1, нанесена строковая шина 26, на четвертой термостойкой диэлектрической мембране 27 расположены сквозные конусообразные микропоры 28, и со стороны меньших диаметров оснований конусов нанесены шестая столбцовая шина 29, седьмая столбцовая шина 30, восьмая столбцовая шина 31, девятая столбцовая шина 32, десятая столбцовая шина 33. Продольные оси всех конусообразных микропор, размещенных на круглой монолитной термостойкой диэлектрической подложки 1, параллельны друг другу и перпендикулярны плоской лицевой и обратной стороне круглой монолитной термостойкой диэлектрической подложки 1. На наружной стороне кольцеобразной монолитной термостойкой диэлектрической подложки 2 размещены одиннадцатая конусообразная микропора 34, двенадцатая конусообразная микропора 35, тринадцатая конусообразная микропора 36, четырнадцатая конусообразная микропора 37, пятнадцатая конусообразная микропора 38, заполненные твердым топливом 8, (конусообразные микропоры 34, 35, 36, 37, 38 - калиброваны и ранжированы по объему соответственно в пропорциях 1-2-4-8-16), сферические воспламенители 9, вложенные в сквозные цилиндрические микропоры 10, расположенные на первой кольцеобразной термостойкой диэлектрической мембране 39, на поверхности которой, обращенной к кольцеобразной монолитной термостойкой диэлектрической подложке 2, нанесена строковая шина 40, на второй кольцеобразной термостойкой диэлектрической мембране 41 расположены сквозные конусообразные микропоры 42, и со стороны меньших диаметров оснований конусов нанесены одиннадцатая столбцовая шина 43, двенадцатая столбцовая шина 44, тринадцатая столбцовая шина 45, четырнадцатая столбцовая шина 46, пятнадцатая столбцовая шина 47. Продольные оси всех радиально расположенных конусообразных микропор направлены вершинами на центр кольцеобразной монолитной термостойкой диэлектрической подложки 2 и перпендикулярны ее боковой поверхности.
На фиг. 3 приведены квадратная матрица двигательных элементов, размещенная на круглой монолитной термостойкой диэлектрической подложки 1, прямоугольная кольцеобразная матрица, расположенная на внешней кольцеобразной поверхности монолитной термостойкой диэлектрической подложки 2, опоясывающей по боковой поверхности круглую монолитную термостойкую диэлектрическую подложку 1, дешифратор столбцов 48, коммутатор адресов двигательных ячеек 49, дешифратор данных 50, первый дешифратор строк 51, второй дешифратор строк 52, третий дешифратор строк 53, блок памяти альтернативных кодовых комбинаций 54, блок памяти отработанных кодовых комбинаций 55, контроллер 56.
В зависимости от класса управляемого МКА, устройство может быть реализовано с помощью известных микроструктурных технологий, используемых для изготовления микроэлектромеханических систем (МЭМС) в диапазоне размеров элементов менее 100 микрометров. Монолитная термостойкая диэлектрическая подложка может быть изготовлена из кварцевого стекла, керамики, термостойкого полимерного композита. В зависимости от назначения двигательной системы, в качестве твердого топлива может быть использовано однокомпонентное, двухкомпонентное или нанокомпозитное топливо (например, нанотермит), и пиротехнические воспламенители, осуществляемые торцевое воспламенение заряда со стороны сопла, используемые в известных двигательных системах для МКА, построенные по МЭМС технологии. Микропоры различных форм в интервале, близком к нано размерному уровню, также могут быть получены с помощью ионно-трековых технологий (основанные на получении с помощью ионов узких латентных треков с последующим их травлением).
Сборка предлагаемой конструкции мультивекторной матричной двигательной системы с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов, при ее изготовлении, может осуществляется например, в следующей последовательности: с аверса на монолитную термостойкую диэлектрическую подложку, с заполненными твердым топливом конусообразными микропорами, накладывается первая термостойкая диэлектрическая мембрана с вложенными сферическими воспламенителями; на нее накладывается вторая термостойкая диэлектрическая мембрана со сквозными конусообразными микропорами. После этого аналогичные операции производят со стороны реверса. На монолитную термостойкую диэлектрическую подложку с заполненными твердым топливом конусообразными микропорами накладывается третья термостойкая диэлектрическая мембрана с вложенными сферическими воспламенителями; на нее накладывается четвертая термостойкая диэлектрическая мембрана со сквозными конусообразными микропорами. Следующим этапам, на круглую монолитную термостойкую диэлектрическую подложку 1 надевается собранная кольцеобразная монолитная термостойкая диэлектрическая подложка 2, с двумя закрепленными кольцеобразными термостойкими диэлектрическими мембранами 39, 41, охватывающая боковую поверхность круглой монолитной термостойкой диэлектрической подложки 1. Конструкция выполнена таким образом, чтобы при сборке многослойного пакета обеспечить самоцентровку полюсов сферических воспламенителей в прилегающих к ним контактных отверстиях шин строк и столбцов по линиям шаровых поясов, при механическом стягивании или склеивании подложки с мембранами. Дешифраторы строк, столбцов, данных, коммутатор адресов двигательных ячеек, блоки памяти могут быть реализованы на радиационно-стойкой (для использования в космосе) программируемой логической интегральной схеме (ПЛИС).
Устройство работает следующим образом: управляющее кодовое слово с контроллера 56 (блок-схема фиг. 3) поступает на информационные входы блока памяти отработанных кодовых комбинаций 55 и блока памяти альтернативных кодовых комбинаций 54. Управляющее кодовое слово состоит: из битов, определяющих направление векторов тяги (вверх-вниз, вперед - назад, влево - вправо); кода адреса строк и столбцов квадратной матрицы, определяющего геометрическое размещение реверсивной двигательной ячейки на поверхности круглой монолитной термостойкой диэлектрической подложки 1; кода адреса строк и столбцов кольцеобразной матрицы, определяющего местоположение радиальной двигательной ячейки на боковой поверхности кольцеобразной монолитной термостойкой диэлектрической подложки 2 и кода данных, определяющего в двоичном коде величину тяги каждой двигательной ячейки. Блок памяти отработанных кодовых комбинаций 55 запоминает коды всех отработанных сферических воспламенителей 9 с целью исключения попыток повторного включения отработанных двигательных элементов, и, в случае появления повторной кодовой комбинации, выдает команду на блок памяти альтернативных кодовых комбинаций 54 на выборку заранее смоделированных и введенных перед началом работы таблиц принятия оптимальных решений в конкретных ситуациях в виде множества наборов альтернативных целенаправленных кодовых комбинаций. Например, если в двигательной ячейке с координатами Xn, Yn уже был использован заряд w4 с тяговым весовым коэффициентом w равным 4, то выбирается в соседней ячейки с адресом Xn+1, Yn заряд с тяговым весовым коэффициентом w равным 4, если же и он также использован, выбирается в двух соседних ячейках с адресами Xn+1, Yn, Хn-1, Yn два заряда w2 и w2 по 2 весовых коэффициента в сумме составляющие 4, если же и они использованы, то выбираются неиспользованные заряды из ближайшего геометрического окружения по координатам Xn, Yn+1, Xn, Yn-1. Также могут быть осуществлены более сложные сочетания комбинаций в разных удаленных друг от друга точках на поверхности круглой монолитной термостойкой диэлектрической подложки 1 и кольцеобразной монолитной термостойкой диэлектрической подложки 2, одинаково влияющих на величины изменения линейных и угловых перемещений, направленных на оптимизацию расхода топлива и живучесть двигательной системы. С пяти информационных выходов блока памяти альтернативных кодовых комбинаций 54 преобразованные кодовые комбинации через адресные шины строк, столбцов и шину данных одновременно поступают на входы первого дешифратора строк 51, который выбирает по координате Y адресную шину реверсивной двигательной ячейки с лицевой стороны подложки (аверса) или с оборотной стороны (реверса) с помощью второго дешифратора строк 52 или с помощью третьего дешифратора строк 53 выбирается адресная шина радиальной двигательной ячейки. С четвертого адресного выхода, через дешифратор столбцов 48, выбирается адресная шина по координате X реверсивной двигательной ячейки единая для коммутируемых элементов реверсивных и радиальных двигательных ячеек, расположенных как на лицевой, так и на оборотной стороне круглой монолитной термостойкой диэлектрической подложки 1, так и на боковой поверхности кольцеобразной монолитной термостойкой диэлектрической подложки 2. Кодовое слово, определяющее адрес реверсивной двигательной ячейки по координате X с дешифратора столбцов 48, поступает на вход коммутатора адресов двигательных ячеек 49, на второй вход которого поступает код с выхода дешифратора данных 50, определяющий величину тяги реверсивной или радиальной двигательной ячейки. Коммутатор адресов двигательных ячеек 49 производит соединение группы шин столбцов с группой шин данных каждой реверсивной или радиальной двигательной ячейки отдельно или нескольких одновременно, задавая кодовой комбинацией, определенный весовой коэффициент тяги в двоичном коде, который в данном примере при использовании пятиразрядного двоичного кода может принимать значения от 1 до 31 (количество разрядов определяется требованиями к точности выполнения маневра МКА). В зависимости от управляющих битов (аверс/реверс/гурт), первый, второй, или третий дешифраторы строк 51, 52, 53 производят включение элементов реверсивных двигательных ячеек на лицевой или оборотной стороне круглой монолитной термостойкой диэлектрической подложки 1 или на боковой стороне кольцеобразной монолитной термостойкой диэлектрической подложки 2, осуществляя этим выбор направления тяги (вверх - вниз, вперед - назад, влево - вправо). Выполнение изменения направлений векторов тяги и управление их величинами поясняется на примере организации работы одной реверсивной и одной радиальной двигательной ячейки, представленных в разрезе на фиг. 2. Первый дешифратор строк 51 производит включение шин строк 12 на лицевой стороне (аверсе) круглой монолитной термостойкой диэлектрической подложке 1 для создания прямого направления векторов тяги, а второй дешифратор строк 52 производит включение шин строк 26 на оборотной стороне (реверсе) круглой монолитной термостойкой диэлектрической подложки 1 для создания векторов тяги с противоположными направлениями. Для создания векторов тяги с управляемым углом в диапазоне от 0 до 360° градусов перпендикулярных реверсным коллинеарным векторам тяги, третий дешифратор строк 53 производит включение шин строк 40 на кольцеобразной монолитной термостойкой диэлектрической подложке 2. Коммутатор адресов двигательных ячеек 49 переключение шин столбцов 15-19, 29-33 и 34-38 осуществляет одновременно с двух сторон круглой монолитной термостойкой диэлектрической подложки 1 и внешней стороны кольцеобразной монолитной термостойкой диэлектрической подложки 2. Шины с выходов коммутатора адресов двигательных ячеек 49 соединены с шинами столбцов 15-19, 29-33 и 34-38, а шины с выходов первого, второго и третьего дешифраторов строк 51, 52, 53 соединены со строковыми 12, 26, 40 шинами. Между строковыми шинами 12, 26, 40 и, соответственно, между столбцовыми шинами 15-19, 29-33 и 43-47, для обеспечения устойчивого электрического контакта, зажаты сферические воспламенители 9. В зависимости от поступившего управляющего кода каждой логической «1», осуществляется воспламенение соответствующих сферических воспламенителей 9, за счет протекания через них электрического тока, вызывающего их детонацию и воспламенение расположенных под ними зарядов твердого топлива 8, размещенных в разных по объему конусообразных микропорах 3-7, 20-24 и 34-38. Каждый воспламенитель 9, разрушаясь, воспламеняет только свой заряд твердого топлива 8 с определенным весовым коэффициентом тяги в определенной реверсивной или радиальной двигательной ячейке. Продукты сгорания твердого топлива 8, вырываясь через сквозные цилиндрические микропоры 10 (свободные от сферических воспламенителей после их распыления при детонации), и за тем через конусообразные сквозные микропоры 14, или 28 или 42, работающие как сопла, создают реактивную тягу. Величина тяги каждой двигательной ячейки может дискретно управляться в зависимости от ее разрядности и может принимать любые дискретные значения в заданном интервале, например, при пяти разрядной организации - 1-31 или при семи разрядной - 1-127.
На фиг. 1 также приведен примерный трехмерный график распределения величин и направлений векторов тяги W по координате Z и координатам X, Y при выполнении маневра малоразмерным космическим аппаратом в определенный момент времени, где:  - величины прямого направления по координате Z вектора тяги,
- величины прямого направления по координате Z вектора тяги,  - величина обратного направления вектора тяги реверсивной двигательной ячейки по координате Z,
- величина обратного направления вектора тяги реверсивной двигательной ячейки по координате Z,  - величины радиальных направлений векторов тяги, (при пяти разрядной организации двигательных ячеек,
- величины радиальных направлений векторов тяги, (при пяти разрядной организации двигательных ячеек,  принимают значения от 1 до 31 с шагом в одну единицу, задаваемые кодом от 00001 до 11111, при коде 00000 - двигательная ячейка выключена);
принимают значения от 1 до 31 с шагом в одну единицу, задаваемые кодом от 00001 до 11111, при коде 00000 - двигательная ячейка выключена);
Предлагаемая конструкция мультивекторной ракетной двигательной системы с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов, соединенная, например, с помощью телескопической штанги с МКА, позволяет одной мультивекторной двигательной ракетной системой, при оптимальном расходе твердого топлива, осуществить коррекцию эволюции орбиты МКА и его ориентацию за счет цифрового управления величинами разнонаправленных радиальных тяг, равномерно распределенных по окружности, охватывающей квадратный массив перпендикулярно направленных коллинеарных тяг синхронизированных с радиальными тягами, что ранее невозможно было осуществить известными двигательными системами, работающими на твердом топливе.
Источники информации
1. Патент на полезную модель RU 178924 U1, 23.04.2018, F02K 9/94, F02K 9/95, B64G 1/40, В81В 7/04. МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ИНДИВИДУАЛЬНЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ ТЯГИ КАЖДОЙ ДВИГАТЕЛЬНОЙ ЯЧЕЙКИ ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ/ Линьков В.А., Вишняков Н.В., Линьков Ю.В., Линьков П.В., Таганов А.И., Гусев С.И.
2. Патент на полезную модель RU 178748 U1, 18.04.2018, F02K 9/94, F02K 9/95, B64G 1/40, В81В 7/04. РЕВЕРСИВНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ИНДИВИДУАЛЬНЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ ТЯГИ КАЖДОЙ РЕВЕРСИВНОЙ ДВИГАТЕЛЬНОЙ ЯЧЕЙКИ ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ/ Линьков В.А., Вишняков Н.В., Линьков Ю.В., Линьков П.В., Таганов А.И., Гусев С.И.
3. Патент RU 2654782 С1, 22.05.2018, F02K 9/94, F02K 9/95, B64G 1/40, В81В 7/04. РЕВЕРСИВНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ИНДИВИДУАЛЬНЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ ТЯГИ КАЖДОЙ РЕВЕРСИВНОЙ ДВИГАТЕЛЬНОЙ ЯЧЕЙКИ ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ/ Линьков В.А., Линьков Ю.В., Линьков П.В., Таганов А.И., Гусев С.И.
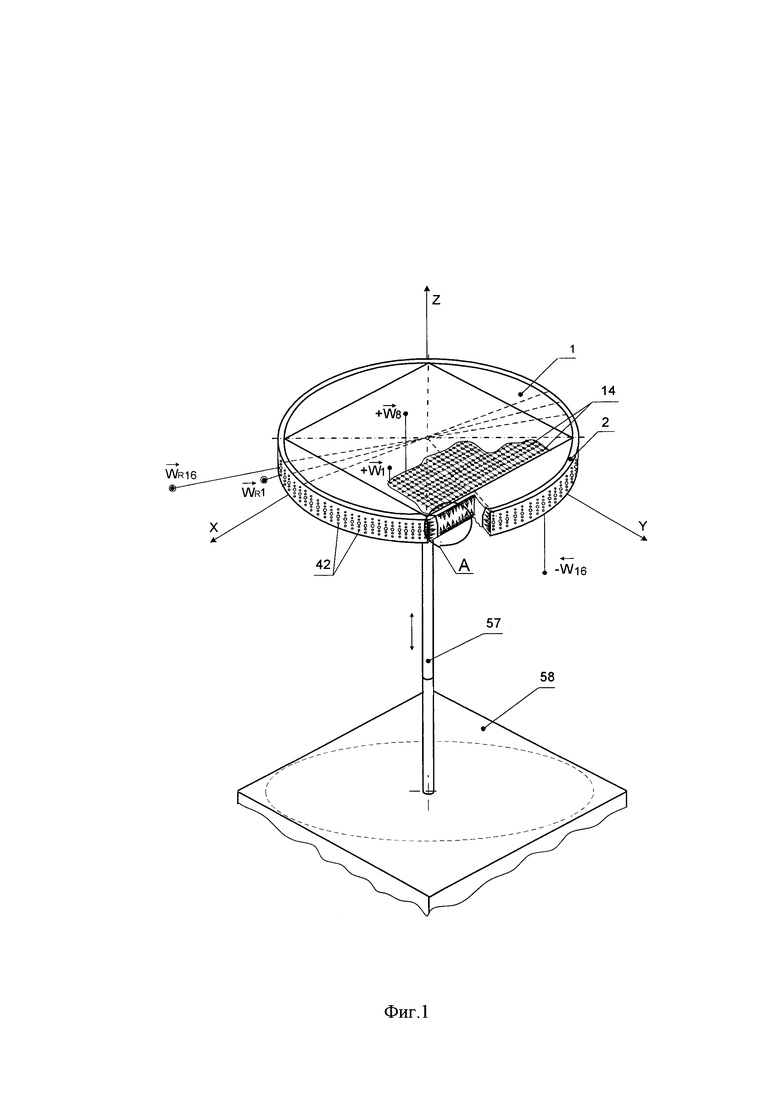
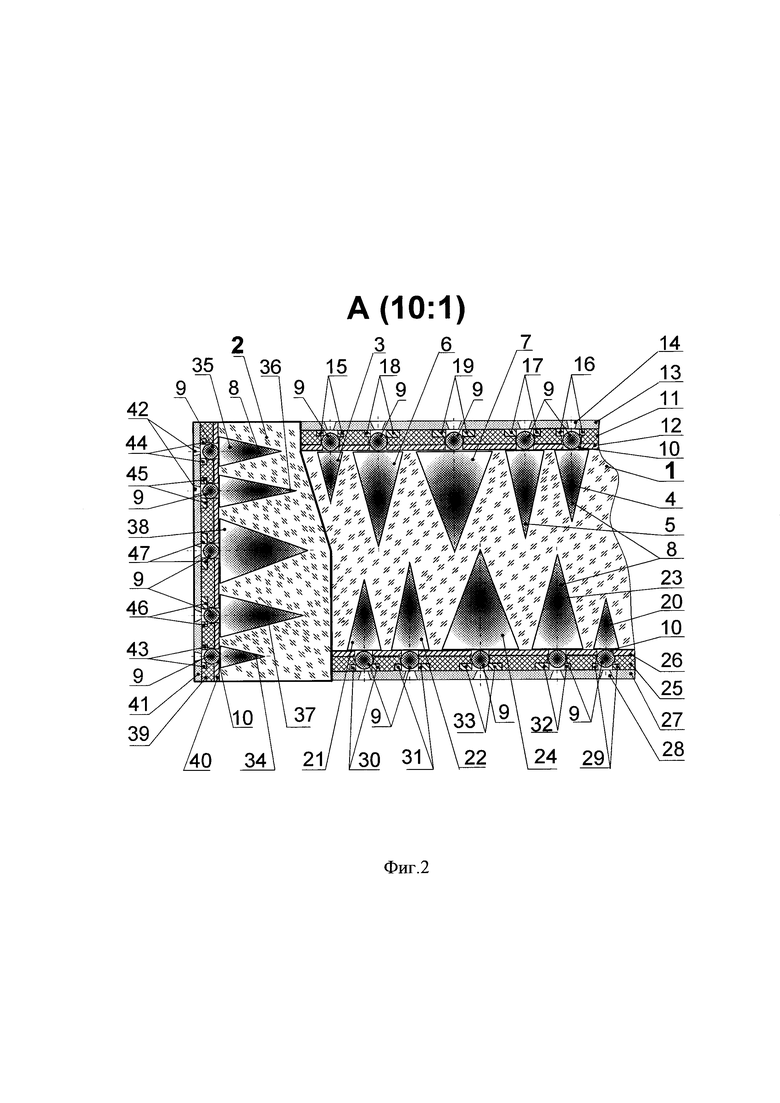
Изобретение относится к двигательным системам для маневрирования и ориентации, преимущественно малых (нано- и пико-) спутников. Система, связанная штангой (57) со спутником (58), содержит круглую (1) и кольцеобразную (2) термостойкие диэлектрические подложки. В подложке (1) размещена квадратная матрица реверсивных двигательных ячеек (14), а в подложке (2) - совокупность радиальных двигательных ячеек (42). Ячейки (14) создают тягу по оси Z, а ячейки (42) – в плоскости XY. Ячейки образованы конусообразными микропорами (соплами) в подложках, заполненными твердым топливом. В центрах оснований конусов, на пересечении шин строк и столбцов соответствующих матриц установлены воспламенители. Цифровое управление векторами тяг производится посредством коммутатора адресов ячеек, дешифраторов строк и столбцов, блока памяти отработанных кодовых комбинаций и др. блоков. Техническим результатом является возможность генерирования прецизионных мультивекторных трехмерных массивов тяг с повышением скорости и точности управления движением малых спутников и иных космических аппаратов. 3 ил.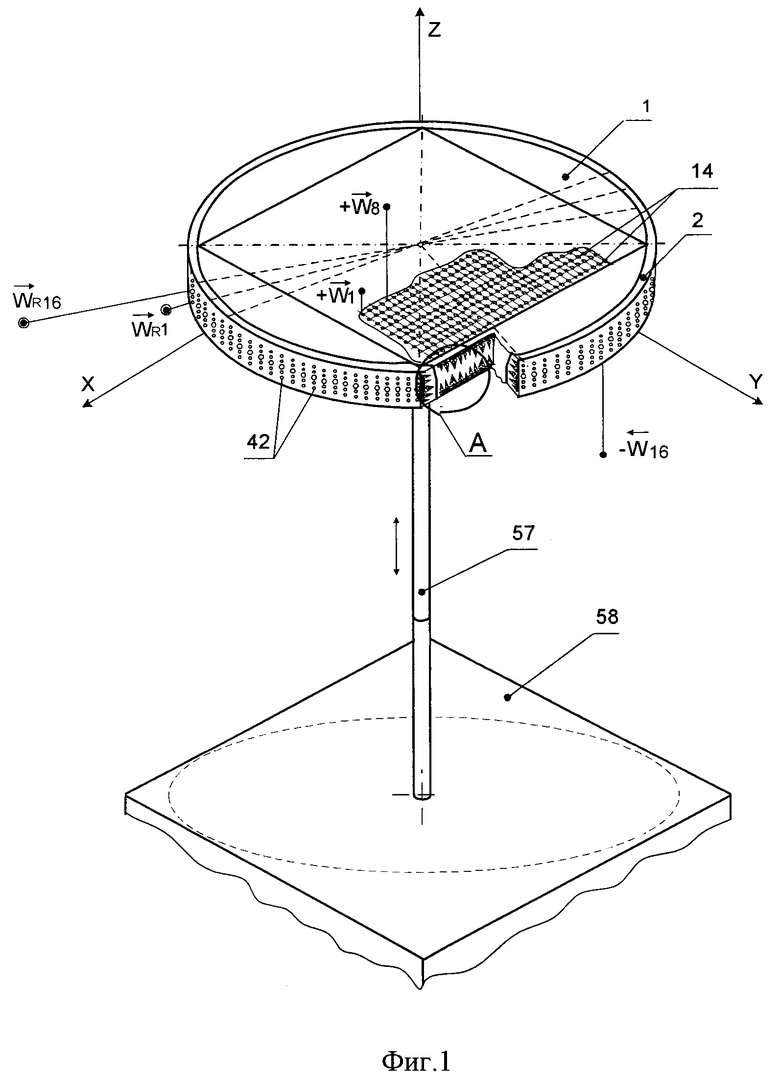
Мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов, содержащая плоскую монолитную термостойкую диэлектрическую подложку с упорядоченной прямоугольной матричной структурой конусообразных микропор, заполненных твердым топливом, с двухсторонней встречно направленной ориентацией вершин конусообразных микропор, ранжированных по объему в пропорциях последовательных степеней числа два, причём реверсивные двигательные ячейки образованы так, что на центры оснований конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажатые центрующими отверстиями шин строк и столбцов первой и третей термостойких диэлектрических мембран, на которые наложены вторая и четвертая термостойкие диэлектрические мембраны со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, коммутатор адресов двигательных ячеек, первый и второй дешифраторы строк, дешифратор столбцов, дешифратор данных, блок памяти отработанных кодовых комбинаций, блок памяти альтернативных кодовых комбинаций, контроллер, отличающая тем, что содержит кольцеобразную монолитную термостойкую диэлектрическую подложку, две кольцеобразные термостойкие диэлектрические мембраны, третий дешифратор строк, причем плоская монолитная термостойкая диэлектрическая подложка выполнена круглой с геометрически вписанной в ее окружность квадратной реверсивной двигательной матрицей и вставлена в кольцеобразную монолитную термостойкую диэлектрическую подложку, третий дешифратор строк соединен с шинами строк, опоясывающими указанную кольцеобразную диэлектрическую подложку с упорядочено расположенными по ее внешней боковой кольцевой поверхности конусообразными микропорами, заполненными твердым топливом, с радиальной ориентацией всех продольных осей конусообразных микропор вершинами на центр указанной круглой диэлектрической подложки, диаметр которой равен внутреннему диаметру кольцеобразной монолитной термостойкой диэлектрической подложки, причём указанные конусообразные микропоры ранжированы по объему в пропорциях последовательных степеней числа два, а радиальные двигательные ячейки образованы так, что на центры оснований указанных конусообразных микропор наложены сферические воспламенители, закрепленные в сквозных цилиндрических микропорах и зажатые центрующими отверстиями шин строк и столбцов, нанесенных на поверхность кольцеобразной монолитной термостойкой диэлектрической подложки и первой кольцеобразной термостойкой диэлектрической мембраны, над которой расположена вторая кольцеобразная термостойкая диэлектрическая мембрана со сквозными конусообразными микропорами, образующими сопла над конусообразными микропорами, заполненными твердым топливом, при этом столбцовые шины радиальных ячеек соединены с выходом коммутатора адресов двигательных ячеек.
| РЕВЕРСИВНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ИНДИВИДУАЛЬНЫМ ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ ТЯГИ КАЖДОЙ РЕВЕРСИВНОЙ ДВИГАТЕЛЬНОЙ ЯЧЕЙКИ ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2654782C1 |
| US 6378292 B1, 30.04.2002 | |||
| US 5318256 А, 07.06.1994 | |||
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2498103C1 |
| US 8464640 В2, 18.06.2013 | |||
| US 20160061148 A1, 03.03.2016. | |||

