Изобретение относится к малоразмерным бинарным космическим аппаратам (БКА), весом менее 1000 грамм, предназначенным для создания сканирующих реконфигурируемых антенн или многоэлементных антенных систем на базе нескольких БКА для кругового или сферического сканирования.
Используемое в описании изобретения словосочетание «бинарный космический аппарат» (БКА) - понимается как космический аппарат, состоящий из двух цилиндрообразных корпусов и одной общей гибкой ленточной солнечной батареи, расположенной между ними, разворачиваемой за счет разматывания солнечных батарей, намотанных в рулон вокруг первого и второго корпуса, вращение которых и перемещения одного корпуса относительно другого в противоположные стороны осуществляется с помощью мультивекторных матричных ракетных двигателей (ММРД) с волнообразными цилиндрическими поверхностями. Гибкая ленточная солнечная батарея (СБ) - это гибкая диэлектрическая ленточная подложка, на которую нанесен массив соединенных между собой тонкопленочных солнечных фотоэлементов.
Известен микро-спутник с солнечной батареей, выполненной в виде гибкой подложки с нанесенными тонкопленочными солнечными фотоэлементами, намотанной при выведении вокруг корпуса микро-спутника и развертываемой с помощью пружин после выхода на заданную орбиту. Микро-спутник содержит: корпус спутника, механизм развертывания на базе торсионных пружин, солнечные батареи, выполненные из гибкой подложки с нанесенными тонкопленочными фотоэлементами, двигатели, антенны, солнечный датчик, конусный узел стыковки с другим спутником [1].
Недостатком устройства является отсутствие возможности раздельного слежения СБ за Солнцем и перемещающимися в разных направлениях источниками радиосигналов, а также отсутствие возможности свертывания в два рулона гибкой подложки с тонкопленочной ленточной СБ, совмещенной с коллинеарной антенной, наматываемой непосредственно вокруг двух цилиндрообразных корпусов БКА при помощи ММРД с волнообразными цилиндрическими поверхностями.
Наиболее близким по технической сущности является бинарный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями, содержащий два кубических корпуса с закрепленной между ними гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон с нанесенными информационно-силовыми шинами и коллинеарной антенной, позиционной штрих-кодовой лентой, два датчика штрих-кода, два мультивекторных матричных ракетных двигателя, две выдвижные телескопические штанги, два линейных шаговых двигателя, две катушки, два дисковых токосъемника, два шаговых двигателя, два лазерных дальномера, две ПЗС-матрицы, два солнечных датчика, два контроллера, два стабилизатора напряжения, два приемопередатчика [2].
Недостатком устройства является отсутствие возможности раздельного слежения СБ за Солнцем и перемещающимися в разных направлениях источниками радиосигналов, а также отсутствие возможности свертывания в два рулона гибкой подложки с тонкопленочной ленточной СБ, совмещенной с коллинеарной антенной, наматываемой непосредственно вокруг двух цилиндрообразных корпусов БКА при помощи ММРД с волнообразными цилиндрическими поверхностями.
Отличие предлагаемого технического решения от выше изложенных заключается во введении двух цилидрообразных корпусов, что позволило осуществить намотку гибкой солнечной батареи непосредственно вокруг корпусов без применения дополнительных катушек. Введение четырех ММРД с волнообразными цилиндрическими поверхностями, генерирующих пакеты тяг с заданными комбинациями их величин и направлений, позволило осуществить реверсивное вращение двух корпусов в сочетании с реверсивным перемещением их относительно друг друга. Это позволило с помощью ММРД с волнообразными цилиндрическими поверхностями многократно разворачивать и сворачивать в рулон СБ. Введение четырех дискообразных сканирующих лазерных дальномеров, работающих с обзором горизонта в 360° градусов, размещенных на торцах цилиндрообразных корпусов, позволило постоянно отслеживать расстояние между верхними и нижними торцами корпусов и угол наклона оси симметрии одного корпуса относительно другого, а также постоянно отслеживать расстояние до рядом расположенных БКА при развертывании многоэлементных антенных полей заданной конфигурации, состоящих из нескольких синхронизированных БКА. Введение двух натяжных стержней, соединенных по средине между собой компактным электромеханическим узлом, состоящим из коаксиально размещенных кольцевого солнечного датчика, дискового токосъемника и шагового двигателя, позволило убрать с корпуса выступающие части для выполнения равномерной намотки солнечной батареи на цилиндрообразные корпуса и осуществить по принципу «русской матрешки» беспрепятственное выдвижение и вложение ММРД с волнообразными цилиндрическими поверхностями на этапах развертывания и свертывания БКА в космосе. Ведение шагового двигателя позволило осуществлять изменение угла расположения одной антенны относительно другой за счет вращения шагового двигателя на 360° градусов для осуществления секторного или кругового сканирования антенной пространства окружающего БКА. Введение дискового токосъемника, расположенного вокруг оси симметрии шагового двигателя, позволило производить обмен информацией между первым и вторым контролерами во время вращения первой гибкой диэлектрической ленточной подложки относительно второй, при разнонаправленной ориентации солнечных батарей и приемопередающих антенн. Введение кольцеобразного солнечного датчика с равномерным распределением фотоэлементов по внешней поверхности кольца, расположенного вокруг дискового токосъемника, позволило получать информацию о координатах Солнца независимо от вращения гибких диэлектрических ленточных подложек с размещенными антеннами и солнечными батареями и положения БКА относительно Солнца. Введение четырех световозвращающих элементов, закрепленных на торцах первого и второго натяжных стержней, позволило осуществить измерение длины выпущенных гибких диэлектрических ленточных подложек СБ и антенн при перпендикулярном расположении одного корпуса относительно другого, в условия отсутствия прямой видимости между дисковыми сканирующими лазерными дальномерами, закрепленными на торцах первого и второго цилиндрообразных корпусов.
Техническим результатом является возможность раздельного слежения СБ за Солнцем и перемещающимися в разных направлениях источниками радиосигналов, а также возможность свертывания в два рулона гибкой подложки с тонкопленочной ленточной СБ совмещенной с коллинеарной антенной, наматываемой непосредственно вокруг двух цилиндрообразных корпусов БКА при помощи ММРД с волнообразными цилиндрическими поверхностями.
Технический результат предложенного изобретения достигается совокупностью существенных признаков, а именно: бинарный космический аппарат со сканирующей антенной, совмещенной со свертываемой в рулон солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями, содержащий два корпуса с закрепленной между ними гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационно-силовыми шинами и коллинеарной антенной, мультивекторные матричные ракетные двигатели, выдвижные телескопические штанги, шаговый двигатель и линейные шаговые двигатели, лазерные дальномеры, солнечный датчик, два контроллера, два стабилизатора напряжения, два приемопередатчика, четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре выдвижные телескопические штанги, четыре линейных шаговых двигателя, четыре дискообразных сканирующих лазерных дальномера, четыре световозвращающих элемента, два натяжных стержня, к одному из которых прикреплен солнечный датчик, выполненный кольцеобразным с равномерным распределением фотоэлементов по внешней поверхности кольца, внутри которого коаксиально размещены дисковый токосъемник и шаговый двигатель, статоры которых соединены с серединой первого натяжного стержня, а коаксиально расположенные их роторы соединены с серединой второго натяжного стержня, первый и второй корпуса, выполненные цилиндрообразными, на торцах которых закреплены дискообразные сканирующие лазерные дальномеры, наружные диаметры которых меньше внутренних диаметров оснований волнообразных цилиндрических поверхностей мультивекторных матричных ракетных двигателей с волнообразными цилиндрическими поверхностями, которые соединены с торцами цилиндрообразных корпусов через выдвижные телескопические штанги, проходящие через центральные отверстия, расположенные по центрам дискообразных сканирующих лазерных дальномеров, внутренние стороны которых ограничивают по ширине свернутые в рулон полотна гибких диэлектрических ленточных подложек солнечных батарей, края полотен которых крепятся к боковым поверхностям первого и второго цилиндрообразных корпусов, а противоположные края первой и второй гибких диэлектрических ленточных подложек механически соединены с первым и вторым натяжными стержнями, соединенными между собой для выполнения вращения относительно друг друга через статор и ротор шагового двигателя, а электрически - через скользящие сигнальные и силовые контакты дискового токосъемника, соединяющие силовые шины и солнечный кольцеобразный датчик с общей информационной шиной первого и второго контроллера, причем, на торцах натяжных стержней закреплены световозвращающие элементы, возвращающие излучение сканирующих лазерных дальномеров в диапазоне выделенных для сканирования длин волн.
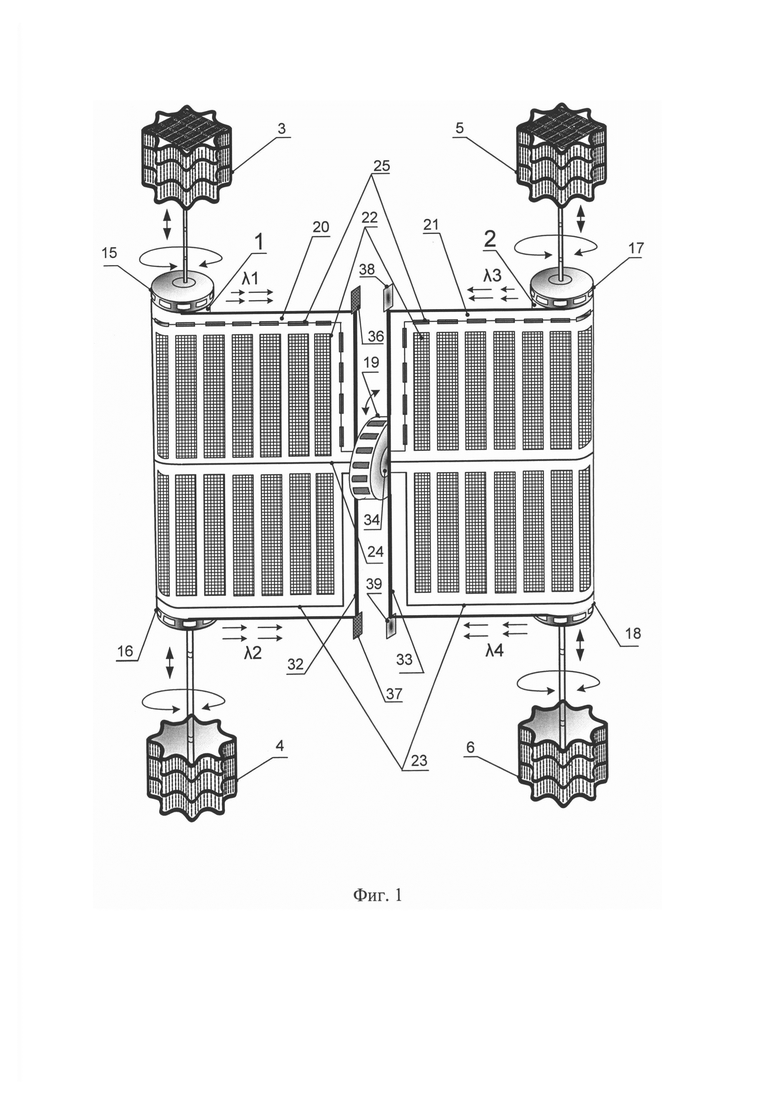
Сущность изобретения поясняется на Фиг. 1, где представлен бинарный космический аппарат со сканирующей антенной, совмещенной со свертываемой в рулон солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями в момент развертывания гибкой ленточной СБ. На Фиг. 2 представлена структурная блок-схема бинарного космического аппарата со сканирующей антенной, совмещенной со свертываемой в рулон солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями На Фиг. 3, Фиг. 4, Фиг. 5, Фиг. 6 поясняются этапы развертывания свернутой в рулон гибкой солнечной батареи. Фиг. 3, первый этап - выполнение тестирования после выведения на заданную орбиту. Фиг. 4, второй этап - выполнение развертывания гибкой СБ. Фиг. 5, третий этап - выполнение развертывания гибкой СБ с одновременной ориентацией ее на Солнце и на заданный источник радиосигнала. Фиг. 6, четвертый этап - выполнение сканирования антенной заданного углового сектора.
Бинарный космический аппарат со сканирующей антенной, совмещенной со свертываемой в рулон солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями, содержит: (Фиг. 1, Фиг. 2) первый цилиндрообразный корпус 1, второй цилиндрообразный корпус 2, первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями, первый 7, второй 8, третий 9, четвертый 10 линейные шаговые двигатели, первую 11, вторую 12, третью 13, четвертую 14 выдвижные телескопические штанги; первый 15, второй 16, третий 17, четвертый 18 дискообразные сканирующие лазерные дальномеры, кольцеобразный солнечный датчик 19, первую 20 и вторую 21 гибкую диэлектрическую ленточную подложку, тонкопленочные солнечные фотоэлементы 22, силовые шины 23, информационную шину 24, коллинеарную антенну 25, первый 26 и второй 27 контроллеры, первый 28 и второй 29 стабилизаторы напряжения, первый 30 и второй 31 приемопередатчики, первый натяжной стержень 32, второй натяжной стержень 33, соединенные между собой через ротор и статор шагового двигателя 34, дисковый токосъемник 35, первый 36, второй 37, третий 38, четвертый 39 световозвращающие элементы, закрепленные на торцах первого 32 и второго 33 натяжных стержней. Первый 32 и второй 33 натяжные стержни в сочетании с шаговым двигателем 34 образуют Н-образную раму с возможностью управляемого прецизионного поворота одного натяжного стержня относительно другого на 360° градусов. На Фиг. 2, в границах замкнутых пунктирных линий, расположены элементы, конструктивно размещенные в первом 1 и втором 2 цилиндрообразных корпусах. λ1, λ2, λ3, λ4 - выделенные длинны волн электромагнитного излучения оптического диапазона, излучаемые первым 15, вторым 16, третьим 17, четвертым 18 дискообразными сканируемыми лазерными дальномерами.
Для успешного развертывания БКА, собранного по принципу «русской матрешки», должны быть выполнены следующие условия: наружный диаметр дисков дискообразных сканирующих лазерных дальномеров должен быть меньше минимального внутреннего диаметра волнообразного контура мультивекторных матричных ракетных двигателей (ММРД) с волнообразными цилиндрическими поверхностями; толщина намотки гибкой СБ, не должна выходить за наружный диаметр дисков сканирующих лазерных дальномеров; ширина гибкой диэлектрической ленточной подложки СБ не должна превышать расстояния между дисками сканирующих лазерных дальномеров, расположенных на торцах первого и второго цилиндрообразных корпусов; толщина дискового токосъемника должна быть достаточной для того, чтобы в процессах свертывания и развертывания ММРД не смогли задеть друг друга цилиндрическими поверхностями при выдвижении их телескопическими штангами.
Для осуществления изобретения могут быть использованы, например, известные технологии изготовления компонентов. В качестве мультивекторного матричного ракетного двигателя (ММРД) с волнообразной цилиндрической поверхностью может быть использована мультивекторная матричная ракетная двигательная система с цифровым управлением величины и направления тяги, которая состоит из плоской дискообразной с волнообразным внешним контуром монолитной термостойкой диэлектрической подложки, с размещенными на ней квадратной матричной реверсивной структурой двигательных ячеек, соединенной с повторяющим ее контур цилиндрообразной полой с волнообразным профилем монолитной термостойкой диэлектрической подложкой с радиально-веерной ориентацией всех продольных осей конусообразных микропор на центры чередующихся сопряженных вогнутых и выпуклых полуокружностей, образующих в совокупности замкнутую волнообразную внешнею поверхность. Все конусообразные микропоры заполнены твердым топливом и ранжированы по объему в пропорциях последовательных степенях числа два (1-2-4-8-16-32), обеспечивающих генерацию множества разнонаправленных векторов тяги с прецизионным цифровым управлением в двоичном коде величиной тяги каждой ячейки. [3, 4].
При изготовлении гибкой СБ могут быть использованы известные технологии изготовления гибких солнечных тонкопленочных батарей, выполненных на базе гибкой подложки с нанесенными тонкопленочными фотогальваническими элементами, изготовленными, по меньшей мере, из аморфного кремния (a-Si), теллурида кадмия (CdTe), арсенида галлия (GaAs) [1].
Устройство работает следующим образом: после вывода на орбиту БКА включаются первый 7, второй 8, третий 9, четвертый 10 линейные шаговые двигатели, осуществляющие выдвижение первой 11, второй 12, третей 13, четвертой 14 телескопических штанг, отводящие первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями от торцов первого 1 и второго 2 цилиндрообразных корпусов. Одновременно включаются первый 15, второй 16, третий 17, четвертый 18 сканирующие лазерные дальномеры, работающие на выделенных длинах волн λ1, λ2, λ3, λ4 для исключения влияния помех от активных или пассивных источников. После проверки работоспособности сканирующих лазерных дальномеров 15, 16, 17, 18 включаются ММРД с волнообразными цилиндрическими поверхностями 3, 4, 5, 6, которые создают вращение первого 1 и второго 2 цилиндрообразных корпусов, разматывая свернутые в рулон первую 20 и вторую 21 гибкие диэлектрические ленточные подложки СБ, с одновременным удалением одного цилиндрообразного корпуса от другого, растягивая полотно СБ в противоположные стороны для исключения провисания (Фиг. 4). После развертывания на требуемую длину первой 20 и второй 21 гибких диэлектрических ленточных подложек с тонкопленочными солнечными фотоэлементами 22 БКА переходит в режим ориентации и слежения за Солнцем. Поворот плоскостей первой 20 и второй 21 гибких диэлектрических ленточных подложек в направлении Солнца и одновременное оптимальное натяжение их осуществляется с помощью первого 3, второго 4 и третьего 5. четвертого 6 ММРД с волнообразными цилиндрическими поверхностями, осуществляющие сближение или удаление, или изменение угла наклона, соответственно, первого 1 или второго 2 цилиндрообразных корпусов. Согласно коду координат Солнца, полученного от кольцеобразного солнечного датчика 19 и информации, поступающей с первого 15, третьего 17 и второго 16, четвертого 18 сканирующих лазерных дальномеров о расстоянии и углах осей между первым 1 и вторым 2 цилиндрообразными корпусами, осуществляются синхронные угловые повороты первого 1 и второго 2 цилиндрообразных корпусов, без изменения расстояния между ними (Фиг. 5). На первой 20 и второй 21 гибких диэлектрических ленточных подложках, кроме тонкопленочных солнечных фотоэлементов 22 и соединяющих их силовых шин 23, также нанесены коллинеарная антенна 25 и проводной двунаправленный канал связи в виде информационной шины 24 для обмена информацией между первым 26 и вторым 27 контроллерами и получения информации от кольцеобразного солнечного датчика 19, выполненного с равномерным распределением фотоэлементов по внешней поверхности кольца. Электрический ток, выработанный тонкопленочными солнечными фотоэлементами 22, поступает на входы первого 28 и второго 29 стабилизаторов напряжения, которые выдают стабилизированные напряжения для питания первого 30 и второго 31 приемопередатчиков, для зарядки аккумуляторов первого 26 и второго 27 контроллеров и для обеспечения электропитанием всех датчиков и двигателей.
При возникновении существенных отклонений в углах ориентации СБ направленной на Солнце, и элементов коллинеарной антенны, направляемых на источник радиосигналов, включается раздельное сопровождение нескольких источников электромагнитного излучения. Это достигается поворотом первого полотна гибкой диэлектрической ленточной подложки 20 относительно второго полотна 21 на заданный угол, синхронным изменением положения второго натяжного стержня 33 и второго цилиндрообразного корпуса 2, с сохранением оптимального натяжения гибких диэлектрических ленточных подложек между первым 1 и вторым 2 цилиндрообразными корпусами (Фиг. 6). Поворот первого 32 и второго 33 натяжных стержней относительно друг друга осуществляется шаговым двигателем 34, статор которого соединен со серединой первого натяжного стержня 32, а ротор - с серединой второго 33 натяжного стержня, который изменяет угол наклона синхронно с изменением угла наклона второго 2 цилиндрообразного корпуса, коррекция положения которого осуществляется с помощью третьего 5 и четвертого 6 ММРД с волнообразными цилиндрическими поверхностями. В зависимости от режимов работы сканирование антенной окружающего БКА пространства может выполняться как в узком секторе (секторное сканирование), так и по кругу (круговое сканирование). При поворотах первой 20 и второй 21 гибких диэлектрических ленточных подложек относительно друг друга до 360° градусов, сохранение связи между информационно-силовыми шинами осуществляется с помощью скользящих сигнальных и силовых кольцевых контактов дискового токосъемника 35, статор и ротор которого расположены коаксиально статору и ротору шагового двигателя 34. Первый 36, второй 37, третий 38, четвертый 39 световозвращающие элементы закрепленные на торцах первого 32 и второго 33 натяжных стержней, позволяют осуществить устойчивое измерение длины выпущенных гибких диэлектрических ленточных подложек СБ и коллинеарных антенн, включая перпендикулярное расположение одного корпуса относительно другого (Фиг. 6) в условия отсутствия прямой видимости между дисковыми сканирующими лазерными дальномерами, закрепленными на торцах первого и второго цилиндрообразных корпусов при вращении полотна одной гибкой диэлектрической ленточной подложки относительно другой, в режиме поиска источников электромагнитного излучения.
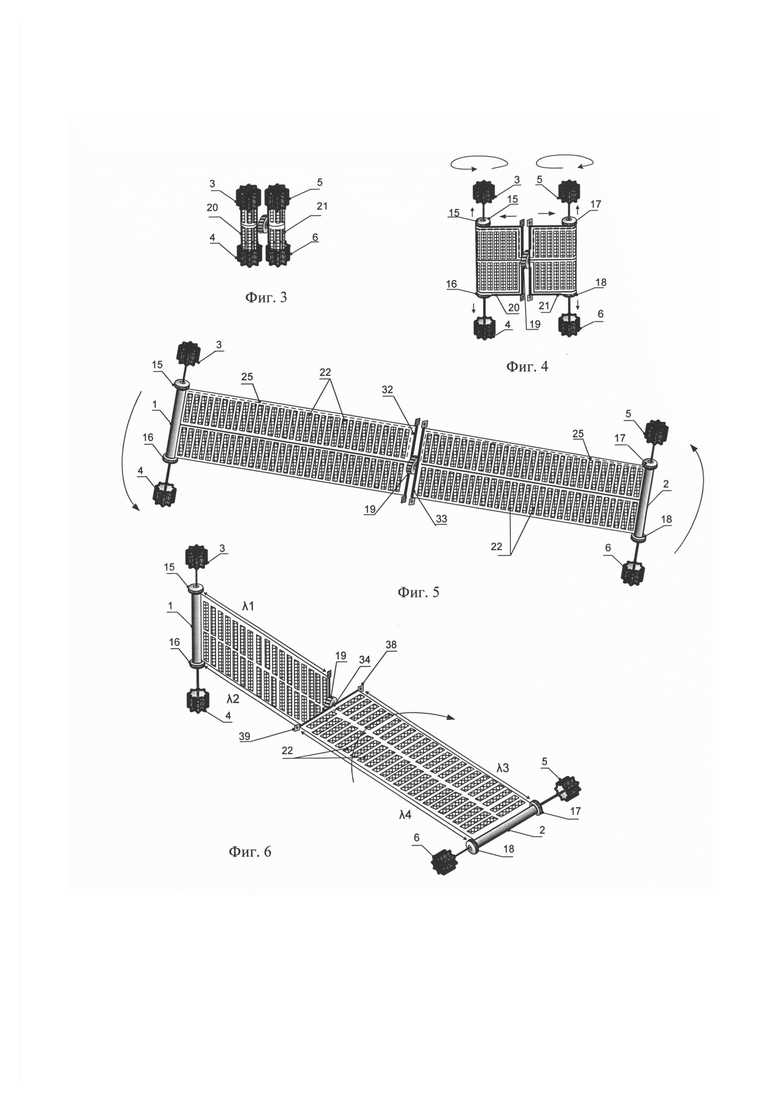
На Фиг. 3, Фиг. 4, Фиг. 5, Фиг. 6 поясняются этапы развертывания гибкой солнечной батареи. Фиг. 3, первый этап - выполнение тестирования после выведения на заданную орбиту. На этом этапе тестируется электроника всех ММРД с волнообразными цилиндрическими поверхностями, в полости которых вложены вершины первого и второго цилиндрических корпусов по принципу «русской матрешки», с целью уменьшения габаритов БКА. Также, в этот режим БКА может переходить при завершении основной работы и для уменьшения размеров отражающей поверхности БКА, когда не требуется полного развертывания СБ и ее ориентации на солнце, а площади двух открытых для освещения участков солнечной батареи достаточно для выработки энергии, обеспечивающей работу БКА в дежурном режиме. Фиг. 4, второй этап - выполнение развертывания гибкой СБ. На этом этапе первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями с помощью первой 11, второй 12, третьей 13, четвертой 14 выдвижных телескопических штанг отводятся от первого 1 и второго 2 цилиндрообразных корпусов. После этого включаются первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями, которые разматывают рулоны и растягивают размотанное полотно первой 20 и второй 21 гибких диэлектрических ленточных подложек в противоположные стороны за счет создания мультивекторных тяг и ориентируясь по показаниям сканирующих лазерных дальномеров с длинами волн λ1, λ2, λ3, λ4. Фиг. 5, третий этап - выполнение развертывания гибкой солнечной батареи с одновременной ориентацией ее на Солнце и источник радиосигнала. На этом этапе первый 3, второй 4, третий 5, четвертый 6 ММРД с волнообразными цилиндрическими поверхностями осуществляют синхронные угловые развороты первого 1 и второго 2 цилиндрообразных корпусов, согласно заданным координатам ориентации поверхностей первой 20 и второй 21 гибких диэлектрических ленточных подложек с тонкопленочными солнечными фотоэлементами 22, с последующей ориентацией и слежением одной гибкой диэлектрической ленточной подложки за Солнцем, а другой - за заданным источником радиосигнала. Фиг. 6, четвертый этап - выполнение сканирования антенной заданного углового сектора. На этом этапе шаговый двигатель 34 синхронно с третьим 5 и четвертым 6 ММТД с волнообразными цилиндрическими поверхностями периодически, реверсивно поворачивают вторую гибкую диэлектрическую ленточную подложку 21 на заданные углы в интервале от 0 до 360° градусов (на Фиг. 6 приведен момент поворота второй подложки 21 на 90° градусов). Это позволяет гибко сочетать изменение режимов сканирования антенны (углов поворота) с реконфигурированием антенны (изменением ее параметров). Двунаправленными стрелками показаны направления развертывания и свертывания гибкой солнечной батареи.
Предложенная конструкция бинарного космического аппарата со сканирующей антенной, совмещенной со свертываемой в рулон солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями, позволила осуществить скоростное свертывание и развертывание гибкой диэлектрической ленточной подложки непосредственно наматывая или сматывая СБ на один или одновременно на два цилиндрообразных корпуса, что дает возможность получить максимальное отношение площади развертываемой солнечной батареи по отношению к сверхмалой площади поверхности корпуса БКА. Разделение полотна гибкой диэлектрической ленточной подложки СБ на две части, растягиваемых с помощью двух натяжных стержней, соединенных по средине между собой компактным электромеханическим узлом, состоящим из коаксиально размещенных кольцевого солнечного датчика, дискового токосъемника и шагового двигателя, позволило осуществлять одновременное раздельное слежение СБ за Солнцем и перемещающимися в разных направлениях источниками радиосигналов, что ранее невозможно было осуществить с помощью известных конструкций малоразмерных космических аппаратов.
Источники информации
1 Patent US 9758260 В2, Sep.12, 2017, B64G 1/22, B64G 1/10, LOW VOLUME MICRO SATELLITE WITH ELEXIBLE WINDED PANELS EXPANDABLE AFTER LAUNCH.
2. Патент на полезную модель RU 190495 U1, 02.07.2019, B64G 1/22, B64G 1/10, БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С ГИБКОЙ ЛЕНТОЧНОЙ СОЛНЕЧНОЙ БАТАРЕЕЙ, РАЗВЕРТЫВАЕМОЙ МУЛЬТИВЕКТОРНЫМИ МАТРИЧНЫМИ РАКЕТНЫМИ ДВИГАТЕЛЯМИ / Линьков В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А.И.
3. Патент RU 2707474 С1, 26.11.2019, F02K 9/95, B64G 1/40, МУЛЬТИВЕКТОРНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ И НАПРАВЛЕНИЕМ ТЯГИ ДВИГАТЕЛЬНЫХ ячеек для малоразмерных космических аппаратов / Линьков В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А.И.
4. Патент на полезную модель RU 189442 U1, 22.05.2019, F02K 9/94, F02K 9/95, B64G 1/40, В81 В 7/04, мулътивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов / Линьков В.А., Гусев С.И., Колесников С.В., Линьков Ю.В., Линьков П.В., Таганов А.И.

Изобретение относится к малоразмерным бинарным космическим аппаратам (БКА), предназначенным для создания реконфигурируемых антенных систем. БКА содержит два цилиндрических корпуса, на торцах которых с помощью телескопических штанг размещены мультивекторные матричные ракетные двигатели (ММРД), осуществляющие развертывание гибкой подложки солнечной батареи (СБ), интегрированной с антенной. Подложка СБ разделена в её середине натяжными стержнями на два полотна, наматываемых на корпусы в виде рулонов. Поворот одного полотна относительно другого осуществляется взаимным разворотом натяжных стержней электроприводом, установленным посередине стержней. Для управления ММРД при развертывании СБ и ориентации БКА служат четыре дисковых сканирующих лазерных дальномера, закрепленных на торцах корпусов. Техническим результатом является обеспечение многократного развертывания и свертывания БКА в компактное положение, а также одновременного слежения СБ за Солнцем, а антенны – за источниками радиосигналов. 6 ил.
Бинарный космический аппарат со сканирующей антенной, совмещенной со свертываемой в рулон солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями, содержащий два корпуса с закрепленной между ними гибкой подложкой с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, с нанесенными информационно-силовыми шинами и коллинеарной антенной, мультивекторные матричные ракетные двигатели, выдвижные телескопические штанги, шаговый двигатель и линейные шаговые двигатели, лазерные дальномеры, солнечный датчик, два контроллера, два стабилизатора напряжения, два приемопередатчика, отличающийся тем, что содержит четыре мультивекторных матричных ракетных двигателя с волнообразными цилиндрическими поверхностями, четыре выдвижные телескопические штанги, четыре линейных шаговых двигателя, четыре дискообразных сканирующих лазерных дальномера, четыре световозвращающих элемента, два натяжных стержня, к одному из которых прикреплен солнечный датчик, выполненный кольцеобразным с равномерным распределением фотоэлементов по внешней поверхности кольца, внутри которого коаксиально размещены дисковый токосъемник и шаговый двигатель, статоры которых соединены с серединой первого натяжного стержня, а их коаксиально расположенные роторы - с серединой второго натяжного стержня, первый и второй корпусы выполнены цилиндрообразными, и на их торцах закреплены дискообразные сканирующие лазерные дальномеры, наружные диаметры которых меньше внутренних диаметров оснований волнообразных цилиндрических поверхностей указанных мультивекторных матричных ракетных двигателей, которые соединены с торцами цилиндрообразных корпусов через выдвижные телескопические штанги, проходящие через отверстия, расположенные по центрам дискообразных сканирующих лазерных дальномеров, внутренние стороны которых ограничивают по ширине свернутые в рулон два полотна гибкой диэлектрической пленочной подложки солнечных батарей, причём одни края полотен крепятся к боковым поверхностям первого и второго цилиндрообразных корпусов, а противоположные края полотен механически соединены с первым и вторым натяжными стержнями, соединенными между собой для выполнения относительного вращения через статор и ротор указанного шагового двигателя, а электрически - через скользящие сигнальные и силовые контакты дискового токосъемника, соединяющие силовые шины и солнечный кольцеобразный датчик с общей информационной шиной первого и второго контроллеров, причем на торцах натяжных стержней закреплены световозвращающие элементы, отражающие излучение сканирующих лазерных дальномеров в диапазоне выделенных для сканирования длин волн.
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С ГИБКОЙ ЛЕНТОЧНОЙ СОЛНЕЧНОЙ БАТАРЕЕЙ, РАЗВЕРТЫВАЕМОЙ МУЛЬТИВЕКТОРНЫМИ МАТРИЧНЫМИ РАКЕТНЫМИ ДВИГАТЕЛЯМИ | 2019 |
|
RU2714064C1 |
| 0 |
|
SU183937A1 | |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТАМИ С ПОМОЩЬЮ ГИБКОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017659C1 |
| US 8464640 В2, 18.06.2013 | |||
| US 7914912 В2, 29.03.2011. | |||

