Настоящее изобретение относится к области радиоэлектроники, а именно - к устройствам обнаружения широкополосных сигналов (со спектральной плотностью мощности в виде отдельных дискретных составляющих полигармонический сигнал) на фоне аддитивной помехи. Основной задачей приемной части системы обнаружения сигналов является принятие решения о наличии или отсутствии полезного сигнала от объекта в наблюдаемом входном процессе.
Поставленная задача решается за счет того, что в приемнике устанавливается порог, выбираемый на основе одного из статистических критериев по заданным вероятностям правильного обнаружения и ложной тревоги, к которому предъявляются наиболее высокие требования, т.к. обнаружение сигнала, как правило, происходит при минимальных отношениях сигнал-помеха.
Достигаемый технический результат заключается в возможности обнаружения сигналов при минимальном значении сигнал-помеха, а также в повышении помехоустойчивости выше отношения сигнал-помеха при установленной вероятности обнаружения сигналов. Высокая эффективность данного устройства, возможность детектировать, сигнал с невысоким значением сигнал-помеха обуславливают высокую экономическую выгоду, которая может быть использована при внедрении в систему обработки гидроакустических сигналов.
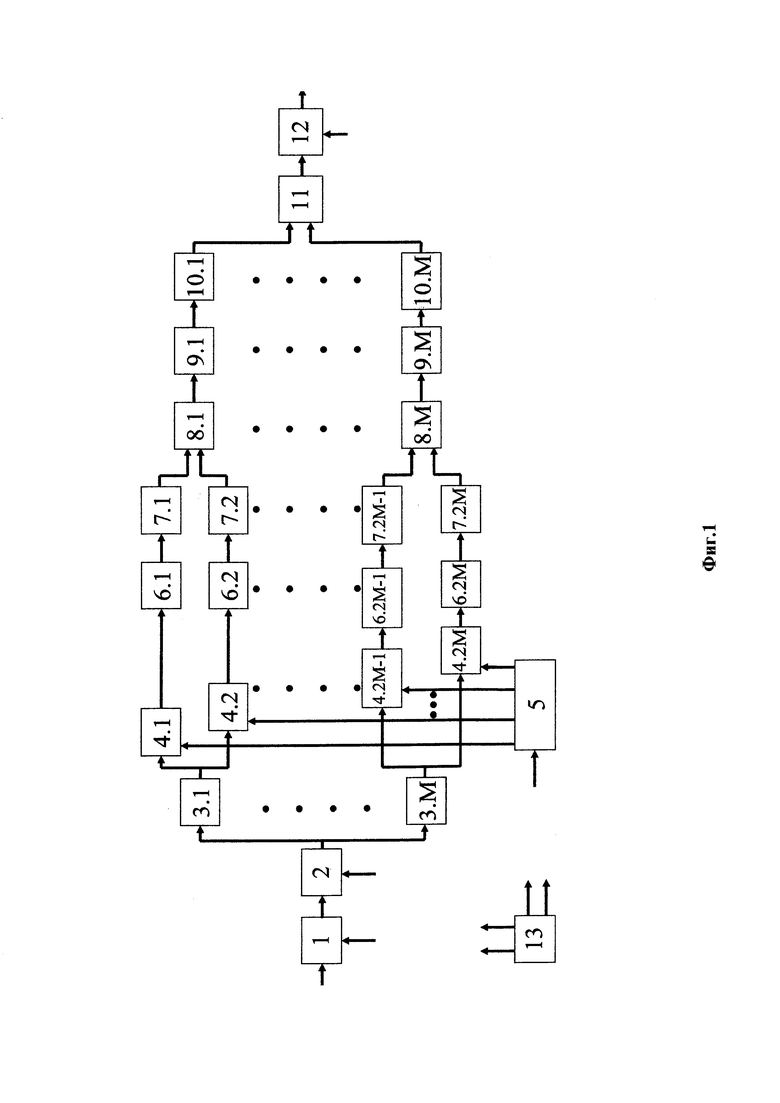
Прототип. В настоящее время для решения этой задачи наибольшее распространение получили так называемые пассивные широкополосные и узкополосные гидроакустические системы [1, 5, 6]. Из предшествующих устройств наиболее интересно устройство обнаружения узкополосных шумовых гидроакустических сигналов на основе квадратурного приемника (прототип; патент №2549207 от 26.03.2015 г.). Схема работы устройства приведена на Фиг. 1,
где:
блок 1 - аналого-цифровой преобразователь (АЦП);
блок 2 - рецйркулятор;
блоки 3.1 - 3.М - набор цифровых узкополосных полосовых фильтров (УПФ), перекрывающих ожидаемый частотный диапазон, с различной шириной полосы пропускания и различными центральными частотами, но с постоянной скважностью фильтров (отношением полосы фильтра к его центральной частоте) во всем диапазоне частот, а именно

Или, учитывая, что ω=2πf

Средняя частота в каждом фильтре определяется выражением
блоки 4.1 - 4.2М - перемножители;
блок 5 - ПЗУ;
блоки 6.1 - 6.2М - интеграторы;
блоки 7.1 - 1.2М - квадраторы;
блоки 8.1 - 8.M - сумматоры;
блоки 9.1 - 9.M - вычислители квадратного корня;
блоки 10.1 - 10.M - устройства задержки
блок 11 - сумматор;
блок 12 - пороговое устройство;
блок 13 - управляющее устройство.
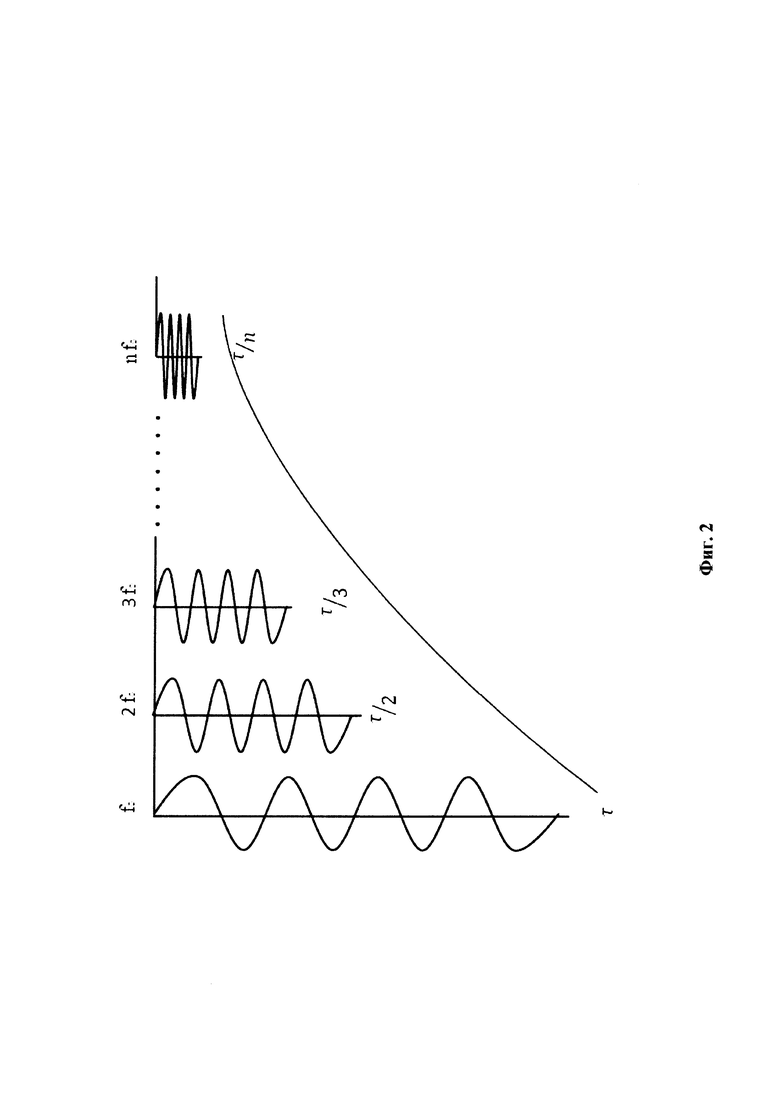
Условие (1) может быть соблюдено, только в случае когда число степеней свободы каждой компоненты полигармонического сигнала одинаковы. Условие (1) означает, что фильтры для каждой компоненты равнодобротны. К примеру, если для частоты f0
соответствует длительность τ, то при частоте 2 f0 соответствует  Фиг. 2
Фиг. 2
Принцип действия устройства заключается в следующем: поступающая реализация входного процесса направляется на вход АЦП (блок 1), где происходит его поступление в виде дискретных отсчетов на вход рециркулятора (блок 2), где формируется и обновляется текущая дискретная выборка. Далее данная выборка поступает одновременно на входы М узкополосных фильтров (блоки 3.1 - 3.M), где одновременно происходит поступление на первые входы М пар перемножителей (блоки 4.1 - 4.2M), с выходов которых результаты поступают в интеграторы (блоки 6.1 - 6.2М). Затем происходит поступление синусных и косинусных составляющих цифровых сигналов из ПЗУ (блок 5) на вторые входы М пар перемножителей (блоки 4.1 - 4.2М). После выхода с M пар интеграторов (блоки 6.1 - 6.2M) результаты поступают на входы квадраторов (блоки 7.1 - 7.2M), после чего происходит их поступление на входы М сумматоров (блоки 8.1 - 8.M), а результаты суммирования затем направляются на входы М вычислителей квадратного корня (блоки 9.1 - 9.M). Позднее результаты вычислений поступают на входы М устройств задержки (блоки 10.1 - 10.М), для обеспечения условия (1), а с выходов этого устройства отклики поступают на входы сумматора (блок 11). Затем результаты суммирования направляются на вход порогового устройства (блок 12), выход которого является выходом устройства. Устройство управления (блок 13) осуществляет синхронизацию работы: аналогово-цифрового преобразователя (блок 1), рециркулятора (блок 2), ПЗУ (блок 5) и порогового устройства (блок 12).
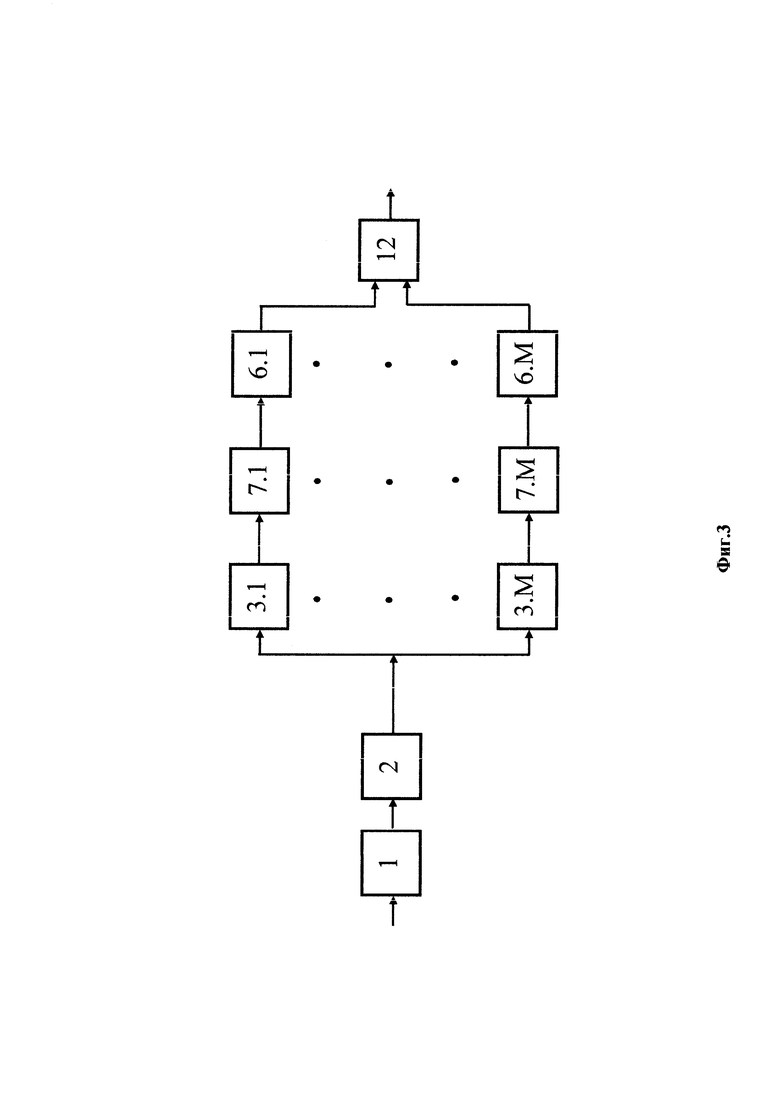
Аналог. Также известен способ, который представляет собой последовательное выполнение операций: многоканальной узкополосной полосовой фильтрации (для формирования отдельных частотных каналов), квадратичного детектирования, интегрирования и сравнения с порогом. Данное устройство (аналог) [1, с. 351-352], реализующее указанный способ обнаружения узкополосного шума, приведено на Фиг. 3,
где:
блок 1 - аналого-цифровой преобразователь (АЦП);
блок 2 - рециркулятор;
блоки 3.1 - 3.М - набор («гребенка») цифровых узкополосных полосовых фильтров (УПФ), с одинаковой шириной полосы пропускания и различными центральными частотами (с равномерным шагом по частоте, равным ширине полосы пропускания одного фильтра);
блоки 7.1 - 7.М - квадраторы;
блоки 6.1 - 6.М - интеграторы;
блок 12 - пороговое устройство.
Принцип действия данного устройства заключается в следующем: на вход устройства поступает реализация входного процесса, которая поступает на вход АЦП (блок 1). С выхода АЦП поступает последовательность импульсов через интервалы удовлетворяющей требованиям теоремы Котельникова: 
fв - верхняя частота спектра сигнала в полосе фильтра;
Δt - интервал дискретизации
С выхода АЦП (блок 1) дискретные отсчеты поступают на вход рециркулятора (блок 2), где формируется и с каждым новым отсчетом обновляется текущая дискретная выборка x(n) длиной N отсчетов. Сформированная текущая дискретная выборка входного процесса x(n) поступает одновременно на входы М цифровых узкополосных фильтров (блоки 3.1 - 3.М) (М - канальной гребенки УПФ), где формируется М отдельных частотных каналов.
Сформированные (расфильтрованные) узкополосные шумовые процессы поступают на входы квадраторов (блоки 7.1 - 7.М), с выходов которых возведенные в квадрат узкополосные сигналы поступают на входы интеграторов (блоки 6.1 - 6.М). Время интегрирования (или накопления) узкополосных сигналов обычно выбирается равным величине, обратно-пропорциональной ширине полосы пропускания УПФ [1], и обеспечивающим потенциальную разрешающую способность по частоте для данного способа спектрального анализа (метода фильтрации). С выходов интеграторов выделенные отклики поступают на вход порогового устройства (блок 12), выход которого является выходом устройства.
В реальных условиях приема полигармонического сигнала на фоне помех о детерминированности полезного сигнала речь идти принципиально не может, так как (как минимум) неизвестна начальная фаза сигнала в обрабатываемой выборке входного процесса, ограниченной по времени. В этом случае предлагается в качестве детектирующего элемента (оптимального приемника) пассивной узкополосной системы использовать оптимальный приемник сигнала с неизвестной начальной фазой (квадратурный детектор).
Предлагаемое устройство. Как правило, в шумовом портрете объекта присутствует несколько полигармонических сигналов, каждый из которых порождается своим источником, который не связан с другими, если на входе принять, что число степеней свободы для каждой компоненты принимаемого сигнала константа (что равносильно  ) и равно N, то на выходе прототипа, отношение сигнал-помеха (ОСП) для каждой компоненты равна
) и равно N, то на выходе прототипа, отношение сигнал-помеха (ОСП) для каждой компоненты равна  Поэтому после обработки сигналов может быть несколько откликов. Если принять, что число компонент в каждом полигармоническом сигнале одинаково (ниже покажем, что это несложно обобщить на случай если число компонент различно) и равно n, то после обработки ОСП увеличится для каждого полигармонического сигнала в
Поэтому после обработки сигналов может быть несколько откликов. Если принять, что число компонент в каждом полигармоническом сигнале одинаково (ниже покажем, что это несложно обобщить на случай если число компонент различно) и равно n, то после обработки ОСП увеличится для каждого полигармонического сигнала в  соответственно отношение сигнал помеха будет иметь следующий вид
соответственно отношение сигнал помеха будет иметь следующий вид  Полученные отклики можно рассматривать как пачку сигналов в спектральной области. Частотный интервал между ними можно рассматривать как аналог скважности. Эту пачку откликов можно запомнить в виде копии в устройстве запоминания в виде опорного сигнала. Если, к примеру, таких полигармонических сигналов m, то после сравнения запомненной копии с реализацией после обработки совокупности полигармонических сигналов отношение сигнал-помеха увеличится
Полученные отклики можно рассматривать как пачку сигналов в спектральной области. Частотный интервал между ними можно рассматривать как аналог скважности. Эту пачку откликов можно запомнить в виде копии в устройстве запоминания в виде опорного сигнала. Если, к примеру, таких полигармонических сигналов m, то после сравнения запомненной копии с реализацией после обработки совокупности полигармонических сигналов отношение сигнал-помеха увеличится  раз. Таким образом, общий выигрыш в ОСП составит
раз. Таким образом, общий выигрыш в ОСП составит  На практике при обработке нескольких полигармонических сигналов возможны ситуации, при которых во входном очередном процессе будет минимальное значение сигнал-помеха, что может привести к отсутствию отклика на выходе вышеописанного устройства. В этом случае, отклик выше порога может быть получен после следующего этапа обработки. Пошагово алгоритм обработки можно представить в следующем виде.
На практике при обработке нескольких полигармонических сигналов возможны ситуации, при которых во входном очередном процессе будет минимальное значение сигнал-помеха, что может привести к отсутствию отклика на выходе вышеописанного устройства. В этом случае, отклик выше порога может быть получен после следующего этапа обработки. Пошагово алгоритм обработки можно представить в следующем виде.
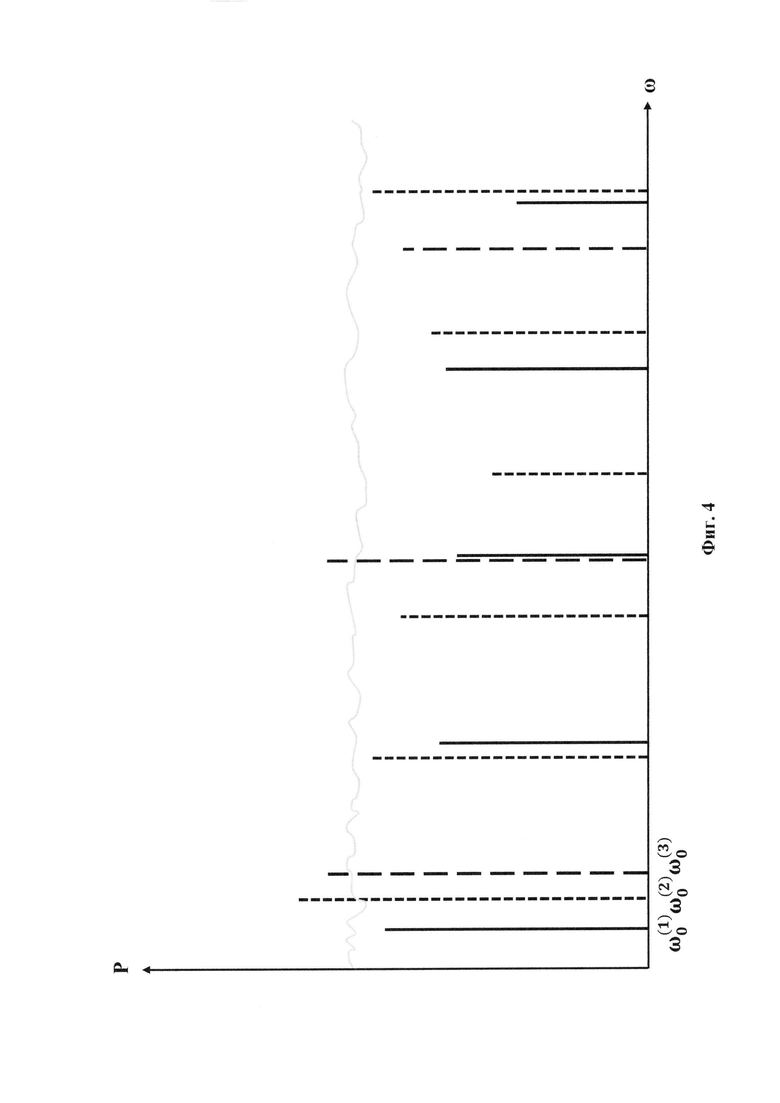
1. На первом этапе принимается реализация состоящая из нескольких полигармонических сигналов (в рассматриваемом случае 3-х. ОСП положим равно  , i=1,2,3…n., N-число степеней свободы. Фиг. 4.
, i=1,2,3…n., N-число степеней свободы. Фиг. 4.
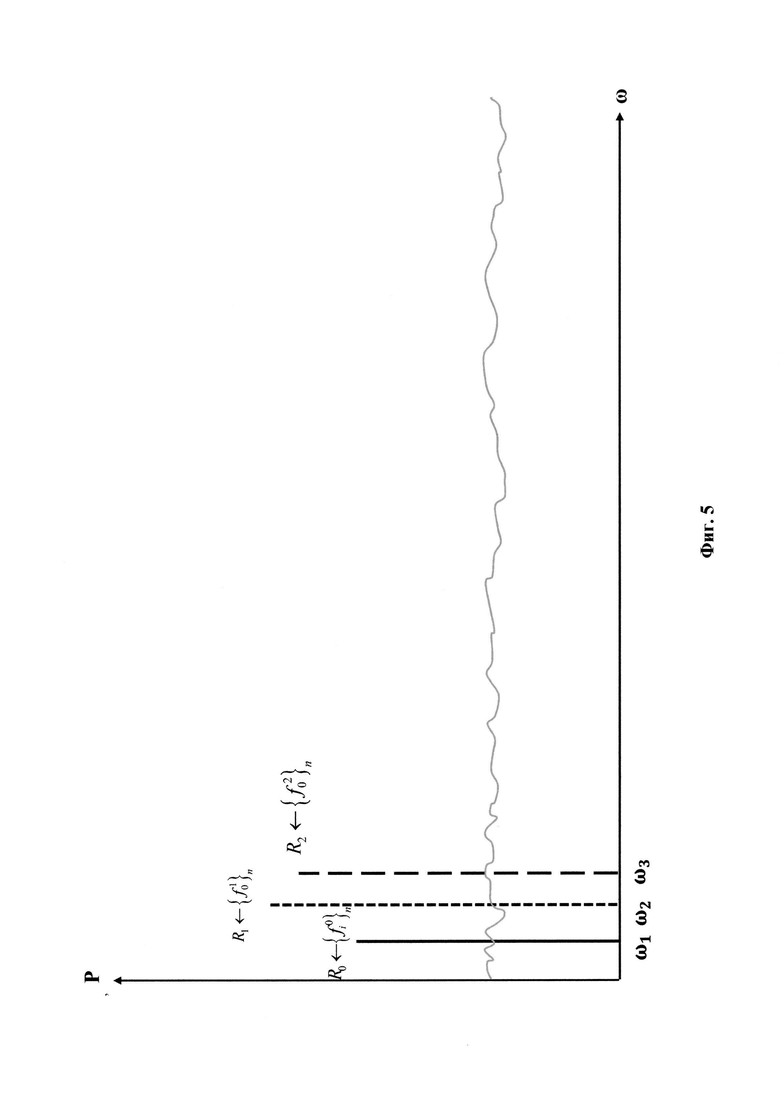
2. На втором этапе проводится обработка сигнала прототипом. В результате на выходе будем иметь для каждого отклика ОСП 
 Фиг. 5
Фиг. 5
3. На третьем этапе, если выделены отклики полигармонических сигналов, вычисляются расстояния между ними по частоте (аналог скважности) и в виде эталона заносится в память.
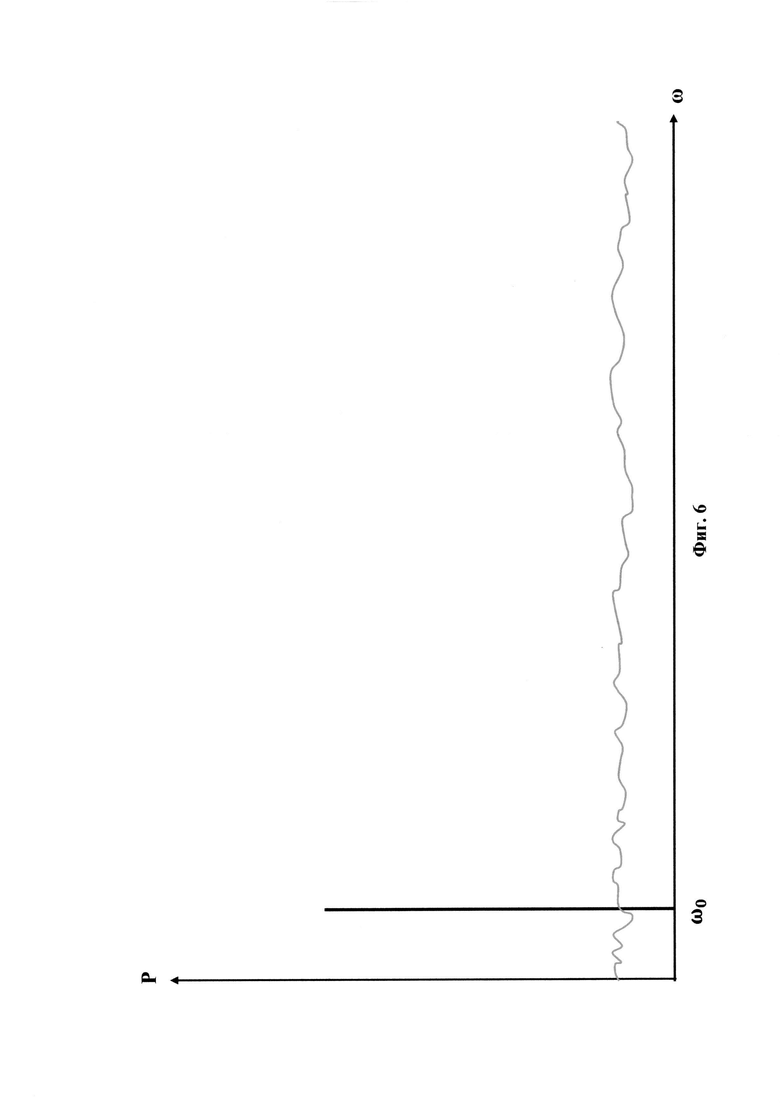
4. На четвертом этапе запомненная копия (эталон) сравнивается с результатом обработки на третьем этапе. В результате получаем выигрыш в ОСП, который можно представить в виде следующего выражения. Фиг. 6
 , для случая
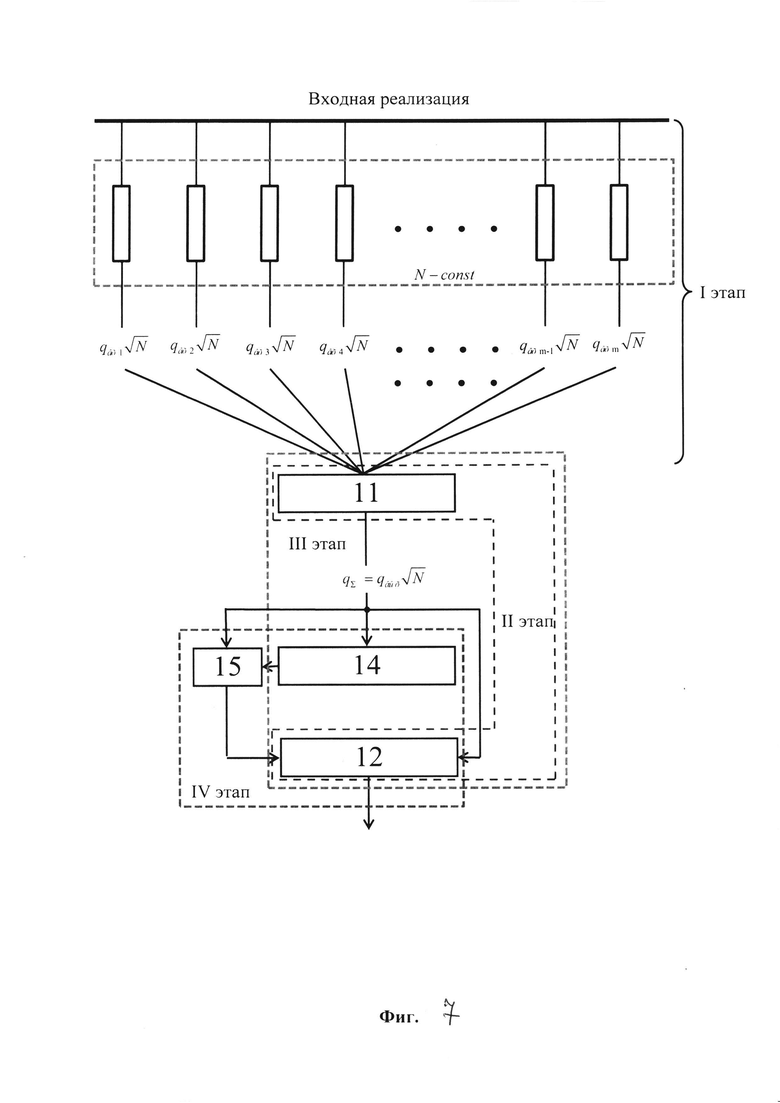
, для случая  Пояснительная схема представлена на Фиг. 7
Пояснительная схема представлена на Фиг. 7
При реализации, предложенного обнаружителя полигармонических сигналов, был решен ряд задач, связанных с необходимостью обеспечения постоянного отношения полосы компоненты к ее центральной частоте (скважность фильтра) во всем диапазоне частот и накопления откликов от нескольких каналов обнаружителя (суммирования выходных процессов) на основе согласования по времени анализа, т.е. введение временных задержек на выходах каналов перед операцией суммирования. Таким образом, предполагаемый положительный эффект при реализации данного устройства обнаружения широкополосных полигармонических сигналов по сравнению с традиционными, достигается благодаря использованию большего объема априорной информации об обнаруживаемом полезном сигнале.
Таким образом, помехоустойчивость прототипа можно увеличить, если использовать апостериорные данные о свойствах сложного полигармонического сигнала, состоящего из нескольких полигармонических сигналов, т.е. выделенные отклики приемника, которые превышают установленный порог. Используя для дальнейшей обработки коррелятор, выделенные отклики можно использовать как опорный сигнал. В корреляторе производится количественная оценка степени сходства откликов очередной дискретной выборки с предыдущей, что позволяет осуществить принцип согласованной фильтрации, и увеличить помехоустойчивость схемы прототипа.
В данном случае дополнительной информацией является совокупность откликов от нескольких полигармонических сигналов и измеренных между ними частотными расстояниями (аналог скважности во времени). С другой стороны, совокупность полигармонических сигналов обладает более сложной структурой и поэтому если эта структура известна, то естественно будет выигрыш в ОСП.
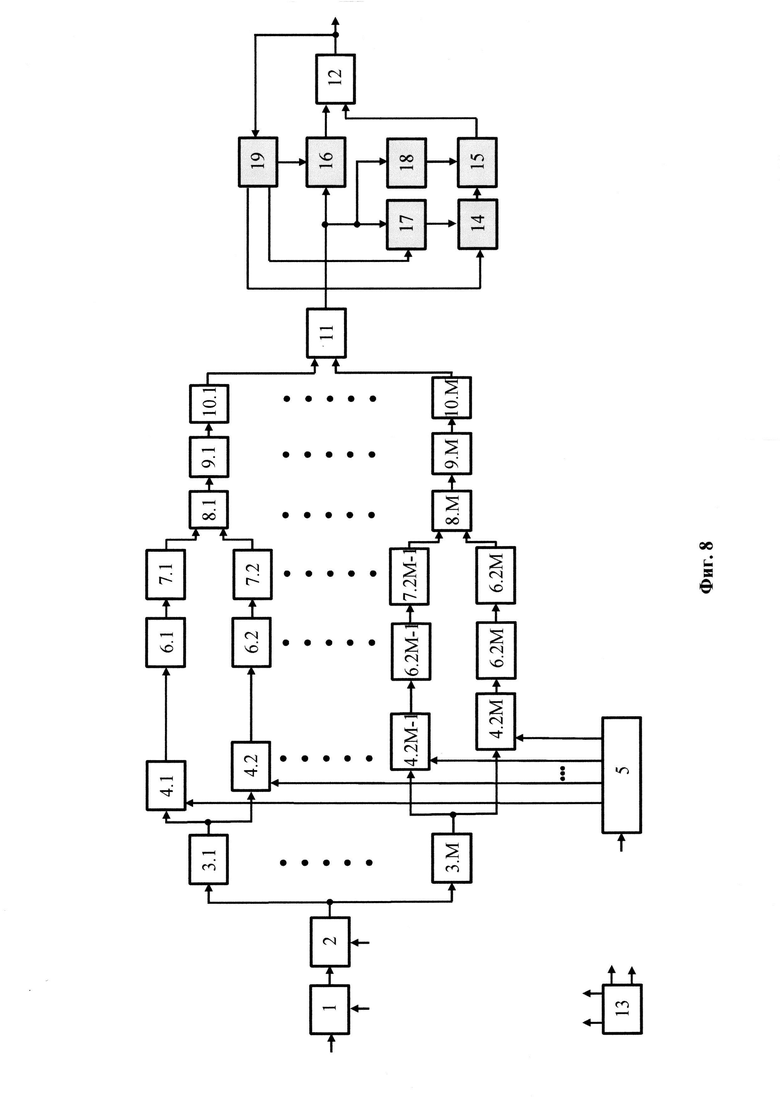
Схема работы предлагаемого устройства на основе прототипа, представлена на фиг. 8,
где:
блок 1 - аналого-цифровой преобразователь (АЦП);
блок 2 - рециркулятор;
блоки 3.1 - 3.М набор цифровых узкополосных полосовых фильтров (УПФ);
блоки 4.1 - 4.М - перемножители;
блок 5 - ПЗУ;
блоки 6.1 - 6.М - интеграторы;
блоки 7.1 - 7.М - квадраторы;
блоки 8.1 - 8.М - сумматоры;
блоки 9.1- 9.М - вычислители квадратного корня;
блоки 10.1 - 10.М - устройства задержки;
блок 11 - сумматор;
блок 12 - пороговое устройство,
блок 13 - управляющее устройство.
дополнительно-включенные блоки:
блок 14 запоминающее устройство; блок
15 - коррелятор;
блок 16 - первое коммутирующие устройство;
блок 17 - второе коммутирующие устройство.
блок 19 - блок управления коммутаторами;
Работает устройство следующим образом:
На вход устройства поступает реализация входного процесса x(t), которая поступает на вход АЦП (блок 1) с частотой дискретизации, удовлетворяющей требованиям теоремы Котельникова: 
С выхода АЦП (блок 1) дискретные отсчеты поступают на вход рециркулятора (блок 2), где формируется и с каждым новым отсчетом обновляется текущая дискретная выборка x(n) длиной N отсчетов.
Сформированная текущая дискретная выборка входного процесса x(n) поступает одновременно на входы М узкополосных фильтров (блоки 3.1 - 3.М). С выходов М узкополосных фильтров (блоки 3.1 - 3.М) М соответствующих узкополосных процессов одновременно поступают на первые входы М пар перемножителей (блоки 4.1 - 4.2М), с выходов которых результаты перемножения поступают на входы М пар интеграторов (блоки 6.1 - 6.2М).
Из ПЗУ (блок 5) на вторые входы М пар перемножителей (блоки 4.1 - 4.2М) поступают М пар синусных и косинусных составляющих (монохроматических) цифровых сигналов с частотами, соответствующими центральным частотам УПФ fm.
С выходов М пар интеграторов (блоки 6.1 - 6.2М) результаты интегрирования поступают на входы М пар квадраторов (блоки 7.1 - 7.2М), с выходов которых квадраты откликов попарно поступают на входы М сумматоров (блоки 8.1 - 8.M), с выходов которых результаты суммирования поступают на входы М вычислителей квадратного корня (блоки 9.1 - 9.М), с выходов которых результаты вычислений поступают на входы М устройств задержки (блоки 10.1 - 10.М). С выходов М устройств задержки (блоки 10.1 - 10.M). С выходов М устройств задержки (блоки 10.1 - 10.М) отклики поступают на входы сумматора (блок 11), с выхода которого отклики поступают на коммутирующие устройства (блоки 16, 17, 18), на первом цикле коммутирующие устройства (блок 17, 18) закрыты, после прохождения через коммутирующее устройство (блок 16) отклик поступает на пороговое устройство (блок 12) где принимается решение о наличии или отсутствии полезного сигнала после чего при наличии сигнала информация подается на выход устройства и подается команда на вход устройства управления (блок 19), которое подает команду на закрытие первого коммутирующего устройства (блок 16) и второго коммутирующего устройства (блок 17) и запись полученной реализации в запоминающем устройстве (блок 14), с поступлением очередной реализации начинается второй цикл в случае принятия решения пороговым устройством (блок 12) о наличии сигнала цикл 1 повторяется, в случае принятия решения об отсутствия полезного сигнала в пороговом устройстве (блок 12) в устройство управления (блок 19) поступает команда об отсутствии полезного сигнала, с которого подается команда на закрытие первого коммутатора (блок 16) и второго коммутатора (блок 17) и команда на выдачу записанной реализации из запоминающего устройства (блок 14) в коррелятор (блок 15). Третий цикл: С поступлением очередной реализации с сумматора (блок 11), через открытый третий коммутатор (блок 18), производится корреляция запомненной копии (эталон) с результатом обработки, результат поступает на второй вход порогового устройства (блок 12), и подается на выход устройства и вход устройства управления (блок 19) и цикл повторяется как в первом цикле, в противном случае управляющее устройство отключает ключи и схема работает в режиме прототипа, пока не появятся вновь несколько звукорядов.
Список использованных источников
1. Бутырский Е.Ю., Смагулов А.Б., Шаталов Г.В., Якунин К.В. Устройство обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника. Патент на изобретение №2549207 от 26.03.2015 г. (Прототип)
2. Бурдик В.С. Анализ гидроакустических систем. Л.: Судостроение, 1988, с. (Аналог, с. 351-352).
3. Болгов B.M., Плахов Д.Д., Яковлев В.Е. Акустические шумы и помехи на судах. Л.: Судостроение, 1984, 192 с.
4 .Бутырский Е.Ю. Функция неопределенности сигналов на группе преобразований. Информация и космос. 2008. №3. с. 31-39.
5. Ван-Трис Г. Теория обнаружения, оценок и модуляции, т. 1, М.: Сов. радио, 1972, 744 с.
6. Ван-Трис Г. Теория обнаружения, оценок и модуляции, т. 3, М.: Сов. радио, 1977, 661 с.
7. Зарайский B.A., Тюрин A.M. Теория гидролокации. Л.: ВМА, 1975, 604 с.
8. Ольшевский В.В. Статистические методы в гидролокации. Л.: Судостроение, 1983, 280 с.
9. Урик Р. Дж. Основы гидроакустики. Л.: Судостроение, 1978, 446 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| Система обнаружения гидроакустических сигналов и их нейросетевой классификации | 2018 |
|
RU2681252C1 |
| Нейросетевая система обнаружения и оперативной идентификации морских целей | 2018 |
|
RU2695985C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ | 2004 |
|
RU2282209C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ НА ОСНОВЕ ДИСКРЕТНОГО ВЕЙВЛЕТ-ПРЕОБРАЗОВАНИЯ | 2010 |
|
RU2439601C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ И ПРИЕМА ДЛЯ ШИРОКОПОЛОСНОЙ РАДИОСВЯЗИ | 1980 |
|
SU1840131A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ В ВИДЕ ЗВУКОРЯДА НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2011 |
|
RU2464588C1 |
| ЦИФРОВОЙ СОГЛАСОВАННЫЙ ФИЛЬТР СИГНАЛОВ С ДИСКРЕТНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 1992 |
|
RU2114514C1 |
Изобретение относится к области радиоэлектроники и гидроакустики, а именно к устройствам обнаружения сигналов при наличии помех. Устройство позволяет повысить помехоустойчивость за счет использования и включения в схему изобретения коррелятора, который, запоминая успешные отклики, поступающие на него, может детектировать сигнал с минимальным значением сигнал-помеха. Изобретение основано на применении квадратурного детектирования в каждом частотном канале пассивной системы вместо традиционных энергетических приемников на основе квадратичного детектирования. Отличительной особенностью является добавление коррелятора после обработки сигнала прототипом, что позволяет провести дополнительную обработку откликов нескольких полигармонических сигналов, рассматриваемых как единый сигнал (аналог пачки сигналов, как во временной области), что основано на необходимости обеспечения постоянной скважности фильтров, и в  раз улучшить отношение сигнал помеха (где m - количество полигармонических сигналов (аналог для коэффициента узкополосности -
раз улучшить отношение сигнал помеха (где m - количество полигармонических сигналов (аналог для коэффициента узкополосности -  , что должно соблюдаться во всем диапазоне частот). Техническим результатом является возможность обнаружения сигналов при минимальном значении сигнал-помеха, а также повышение помехоустойчивости выше отношения сигнал-помеха при установленной вероятности обнаружения сигналов. 8 ил.
, что должно соблюдаться во всем диапазоне частот). Техническим результатом является возможность обнаружения сигналов при минимальном значении сигнал-помеха, а также повышение помехоустойчивости выше отношения сигнал-помеха при установленной вероятности обнаружения сигналов. 8 ил.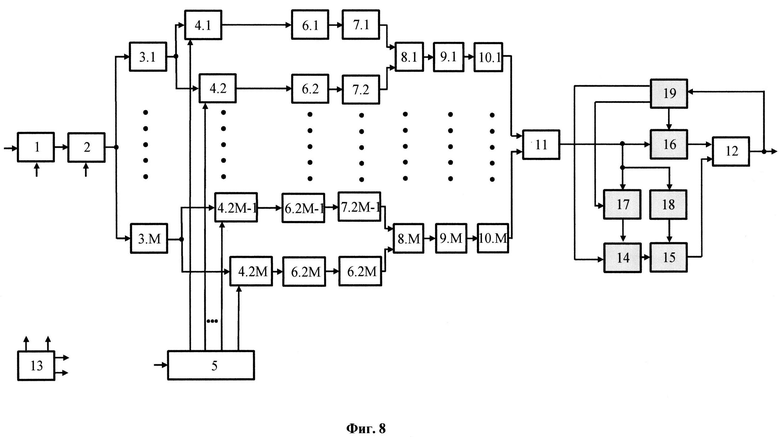
Устройство обнаружения широкополосных полигармонических сигналов на основе квадратурного приемника, содержащее аналого-цифровой преобразователь, на вход которого подается входной сигнал, а выход которого соединен с входом рециркулятора, выход которого соединен с входами М узкополосных фильтров, выходы M узкополосных фильтров соединены с первыми входами М пар перемножителей, выходы которых соединены с входами М пар интеграторов, выходы которых соединены с входами М пар квадратов, выходы которых попарно соединены с входами М сумматоров, выходы которых соединены с входами М вычислителей квадратного корня, выходы которых соединены с входами М устройств задержки, выходы которых соединены с М входами сумматора, выход которого соединен с входом порогового устройства, выход которого является выходом устройства; 2М выходов постоянного запоминающего устройства соединены со вторыми входами М пар перемножителей; выходы управляющего устройства соединены с управляющими входами аналого-цифрового преобразователя, рециркулятора, постоянного запоминающего устройства и порогового устройства, отличающееся тем, что в целях повышения помехоустойчивости и эффективности прототипа выход сумматора подключен к первому входу второго коммутатора и входу третьего коммутатора и первому входу первого коммутатора, выход которого подключен к первому входу порогового устройства, выход которого является выходом устройства и подключен к входу устройства управления, первый вход которого подключен ко второму входу второго коммутатора, выход которого подключен к первому входу запоминающего устройства, второй вход которого подключен ко второму выходу устройства управления, третий выход которого подключен ко второму входу первого коммутатора, выход запоминающего устройства подключен ко второму входу коррелятора, первый вход которого подключен к выходу третьего коммутатора, выход коррелятора подключен ко второму входу порогового устройства.
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| РАДИОГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН ИСТОЧНИКОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2015 |
|
RU2593673C2 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| JP 10221434 A, 21.08.1998. | |||

