Изобретение относится к области гидроакустики и может быть использовано для построения экспертных интеллектуальных систем распознавания и классификации источников гидроакустических сигналов, обнаруженных в режиме шумопеленгования. Распознавание и классификация морских целей по признакам их полей с помощью вычислительных операций нейронных сетей позволяет ускорить процесс распознавания и повысить вероятность классификации как надводных, так и подводных целей.
Известный способ обнаружения широкополосного шума с дискретными компонентами и реализующее его устройство, по сути, являются многоканальным энергетическим приемником (см. Бурдик B.C. Анализ гидроакустических систем. - Л.: Судостроение, 1988, С. 351–352). Данный способ представляет собой последовательное выполнение операций: многоканальной узкополосной полосовой фильтрации (для формирования отдельных частотных каналов), квадратичного детектирования, интегрирования и сравнения с порогом в каждом частотном канале. Помехоустойчивость приемника на основе квадратичного детектора является нижней границей всех оптимальных приемников. Поэтому в неблагоприятных условиях, которые определяются особенностями помехи и наличием интенсивных направленных источников помех, акустикой окружающей среды (профиль скорости звука, глубина и наклон дна и т.п.) эффективность приемника на основе квадратичного детектора может резко ухудшиться.
В качестве априорных данных о свойствах шумового сигнала от объекта можно использовать данные об узкополосных дискретных компонентах сигнала (дискретных составляющих), которые фактически представляют собой набор элементарных непрерывных синусоидальных сигналов соответствующей частоты. В этом случае можно говорить о решении задачи обнаружения полигармонического сигнала на фоне помехи.
Наиболее близким по технической сущности устройством является обнаружитель шумовых гидроакустических сигналов на основе квадратурного приемника содержащий аналого-цифровой преобразователь, на вход которого подается входной сигнал, а выход которого соединен с входом рециркулятора, выход которого соединен с входами М узкополосных фильтров, выходы которых соединены с первыми входами Μ пар перемножителей, выходы которых соединены с входами Μ пар интеграторов, выходы которых соединены с входами Μ пар квадраторов, выходы которых попарно соединены с входами Μ сумматоров, выходы которых соединены с входами М вычислителей квадратного корня, выходы которых соединены с входами Μ устройств задержки, выходы которых соединены с М входами сумматора, выход которого соединен с входом порогового устройства; 2М выходов постоянного запоминающего устройства соединены со вторыми входами М пар перемножителей; выходы управляющего устройства соединены с управляющими входами аналого-цифрового преобразователя, рециркулятора, постоянного запоминающего устройства и порогового устройства (см. Пат. 2549207 РФ, МПК G01S 15/04 (2006.01). Устройство обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника; опубл. 20.04.2015, бюл. №11).
Устройство-прототип обнаруживает шумовые гидроакустические сигналы в виде дискретных составляющих на фоне аддитивной помехи. Алгоритм работы устройства основан на квадратурном детектировании в каждом частотном канале. Использование большего объема априорной информации об обнаруживаемом полезном сигнале позволяет увеличивать помехоустойчивость обнаружителя широкополосных сигналов и, соответственно, дальность действия гидроакустической системы шумопеленгования.
При практической реализации устройства обнаружения шумовых гидроакустических сигналов на основе квадратурного приемника необходимо определить частотные характеристики узкополосных фильтров, а именно полосы пропускания фильтров (Δfm) и их центральные частоты (fm). Определение вышеуказанных характеристик основано на необходимости обеспечения постоянной скважности фильтров (отношения ширины полосы фильтра к его центральной частоте) во всем диапазоне частот, а именно

После элементарных преобразований можно получить определяющие соотношения
При этом количество узкополосных фильтров в гребенке для общей полосы частот ΔF составит
Время анализа (интегрирования) в полосе каждого фильтра будет определяться выражением
 (1)
(1)
Очевидно, что в случае накопления откликов от нескольких каналов обнаружителя (суммирования выходных процессов) необходимо согласование по времени анализа, т.е. введение временных задержек на выходах каналов перед операцией суммирования. Для гребенки из М фильтров параметры задержки можно определить по формуле
 (2)
(2)
Введение операции накопления откликов обусловлено необходимостью повышения эффективности обнаружения звукоряда полигармонического сигнала и учета возможного влияния эффекта Доплера при взаимном перемещении приемника и источника сигнала.
Недостатком устройства-прототипа является отсутствие в структурной схеме специальных блоков и их связей с существующими блоками, которые должны обеспечивать классификацию (распознавание) обнаруживаемых объектов, как источников гидроакустических сигналов, на классы надводный объект или подводный объект в автоматическом режиме. Что ограничивает функциональные возможности устройства-прототипа.
Задача, на решение которой направлено заявляемое изобретение, заключается в дальнейшей разработке структурной схемы устройства-прототипа для его реализации как системы обнаружения гидроакустических сигналов и их нейросетевой классификации. Система должна обеспечивать обнаружение источников гидроакустических сигналов в режиме шумопеленгования, их автоматическое распознавание и классификацию по амплитудно-частотным характеристикам на основе нейросетевых технологий и оперативно обновляемой библиотеки математически обработанных образов спектрограмм морских целей.
Техническим результатом предлагаемого изобретения является обеспечение автоматического распознавания и классификации надводных и подводных источников гидроакустических сигналов, обнаруженных в режиме шумопеленгования.
Указанный технический результат достигается тем, что разработана система обнаружения гидроакустических сигналов и их нейросетевой классификации, содержащая аналого-цифровой преобразователь, на вход которого подается входной сигнал, а выход которого соединен с входом рециркулятора, выход которого соединен с входами М узкополосных фильтров. Выходы М узкополосных фильтров соединены с первыми входами Μ пар перемножителей, выходы которых соединены с входами Μ пар интеграторов, выходы которых соединены с входами Μ пар квадраторов. Выходы Μ пар квадраторов попарно соединены с входами Μ сумматоров, выходы которых соединены с входами М вычислителей квадратного корня, выходы которых соединены с входами Μ устройств задержки, выходы которых соединены с М входами сумматора, выход которого соединен с входом порогового устройства. 2М выходов постоянного запоминающего устройства соединены со вторыми входами М пар перемножителей. Выходы управляющего устройства соединены с управляющими входами аналого-цифрового преобразователя, рециркулятора, постоянного запоминающего устройства и порогового устройства. Принципиальным отличием от прототипа является то, что дополнительно введен тракт нейросетевого распознавания и классификации целей, содержащий блок распознавания класса цели по амплитудно-частотной характеристике, охваченный обратной связью с блоком обучения. При этом выход порогового устройства соединен с входом блока распознавания класса цели по амплитудно-частотной характеристике, на выходе которого формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации.
Как известно, обнаружение гидроакустических сигналов и извлечение из них полезной информации определяет основы алгоритмизации обработки данных в экспертной интеллектуальной системе классификации морских целей. Для формирования вектора признаков, являющегося входным информационным массивом распознающей сети, используется метод масок. Процесс формирования информационных массивов необходим для решения двух задач, первая из которых представляет собой процесс формирования эталонных образцов, необходимых для реализации процесса обучения распознающей сети, и вторая для распознавания целей (см. Пятакович В.А., Богданов В.И., Назаренко П.К. Принцип автоматического распознавания образа цели: материалы Международной конференции «Математическое моделирование физических, экономических, технических, социальных систем и процессов». - Ульяновск: УГУ, 2003. - С. 31, 32; Пятакович В.А., Василенко А.М., Хотинский О.В. Распознавание и классификация источников формирования полей различной физической природы в морской среде: монография. - Владивосток: Морской гос. ун-т им. Г.И. Невельского, 2017. - 255 с.; Пятакович В.А., Василенко А.М., Мироненко М.В. Нейросетевые архитектуры для решения задач классификации информационных полей морских объектов, методика их обучения. Интернет-журнал «Науковедение», 2017, Том 9, №2 [Электронный ресурс] - Режим доступа: http: //naukovedenie.ru/PDF/ 54TVN217.pdf); Пятакович В.А., Василенко А.М., Хотинский О.В. Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей: монография. –Владивосток: Морской гос. ун-т им. Г.И. Невельского, 2018. - 263 с.)
Идея метода состоит в том, что для каждой маски ищется максимальное амплитудное значение, которое и является ортом вектора классификационных признаков. Для автоматизации процесса поиска экстремума в зоне одной маски использовалась сеть поиска максимума MAXNET (сеть циклического функционирования). Итерации сети завершаются после того, как выходные нейроны сети перестают меняться. Типы входных сигналов - целые или действительные числа, типы выходных - действительные числа. Размерности входных и выходных сигналов совпадают. Тип активационной функции - линейная с насыщением (используется линейный участок). Число синапсов в сети равно N (N - 1). Формирование синаптических весов происходит согласно формуле

где Wij - i-й синаптический вес j-го нейрона; N - число элементов входного сигнала (количество нейронов в сети).
Функционирование сети задается выражением

где хj - элемент (орт) входного сигнала сети; уi - выход j-го нейрона.
Нормализация входного вектора признаков, полученного после анализа масок сетью MAXNET, производится согласно выражения
Границы диапазона значений 
Обучение распознающей сети производится на основе алгоритма обратного распространения ошибки (см. Пятакович В.А., Василенко А.М., Хотинский О.В. Распознавание и классификация источников формирования полей различной физической природы в морской среде: монография. - Владивосток: Морской гос. ун-т им. Г.И. Невельского, 2017. - 255 с.; Пятакович В.А., Василенко А.М. Предварительная обработка информации нейроноподобным категоризатором при распознавании образов морских объектов. Подводное морское оружие. - СПб: 2017. - Вып. 1 (32). - С. 31-34; Пятакович В.А., Василенко А.М. Перспективы и ограничения использования геометрических методов распознавания акустических образов морских объектов применительно к задаче управления нейросетевой экспертной системой. Фундаментальные исследования. - М: 2017. - №7. - С. 65-70; Пятакович В.А., Василенко А.М., Хотинский О.В. Нейросетевые технологии в интеллектуальных системах обнаружения и оперативной идентификации морских целей: монография. - Владивосток: Морской гос. ун-т им. Г.И. Невельского, 2018. - 263 с.), реализующего градиентный метод оптимизации функционала вида:

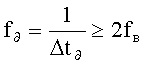
Изобретение поясняется чертежами, где на фиг. 1 показана функциональная схема системы обнаружения гидроакустических сигналов и их нейросетевой классификации, содержащая следующие элементы:
1. Аналого-цифровой преобразователь (АЦП).
2. Рециркулятор.
3.1-3.М. Набор цифровых узкополосных полосовых фильтров (УПФ), перекрывающих ожидаемый частотный диапазон, с различной шириной полосы пропускания и различными центральными частотами, но с постоянной скважностью фильтров (отношением полосы фильтра к его центральной частоте) во всем диапазоне частот.
4.1.1, 4.2.1-4.1.М, 4.2.М. Квадраторы.
5.1.1, 5.2.1-5.1.М, 5.2.М. Интеграторы.
6. Пороговое устройство.
7.1.1, 7.2.1-7.1.М, 7.2.М. Перемножители.
8. Постоянное запоминающее устройство (ПЗУ).
9.1-9.М. Сумматоры.
9. Сумматор.
10.1-10.М. Вычислители квадратного корня.
11.1-11.М. Устройства задержки.
12. Управляющее устройство.
13. Тракт нейросетевого распознавания и классификации целей.
14.1. Блок распознавания класса цели по амплитудно-частотной характеристике.
14.2. Блок обучения.
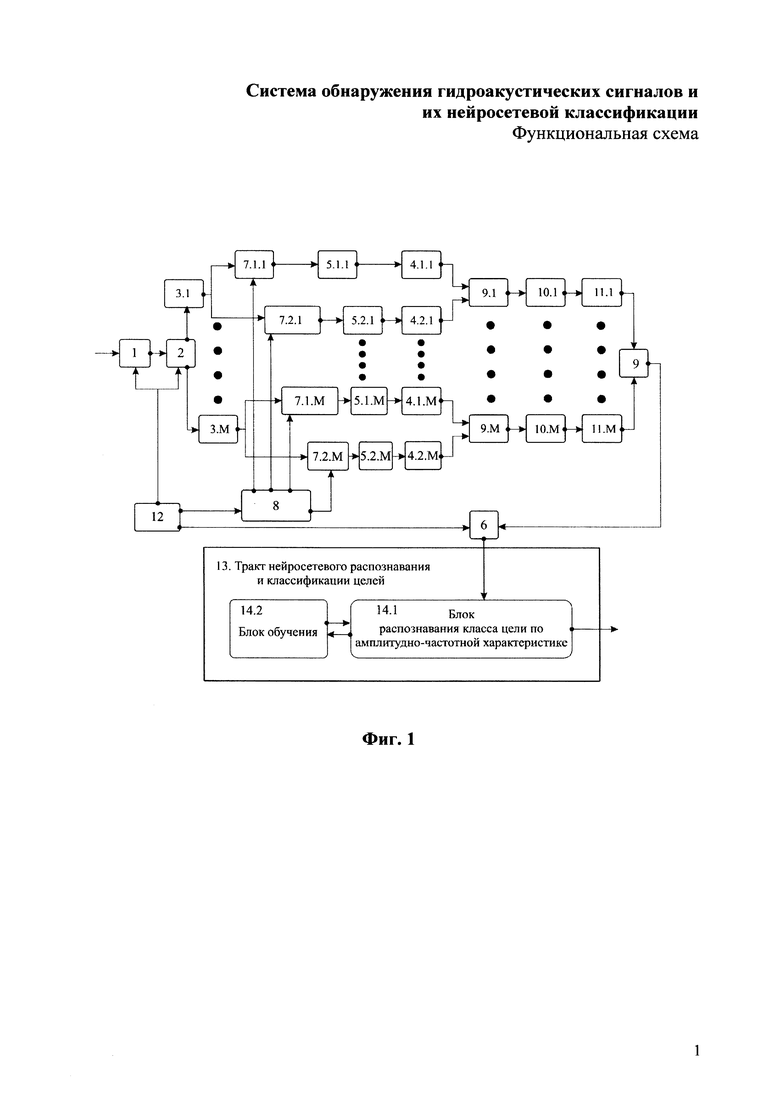
Общая структура распознающей сети представлена на фиг. 2. Нейроны, составляющие сеть, одинаковы и имеют функцию активации известного типа

где х2n(i), yn(i) и In(i) - значения r - го входного сигнала, выходного сигнала и внешнего смещения n - го нейрона i - го слоя; Ni - число нейронов в i - м слое; i=1, 2, 3.
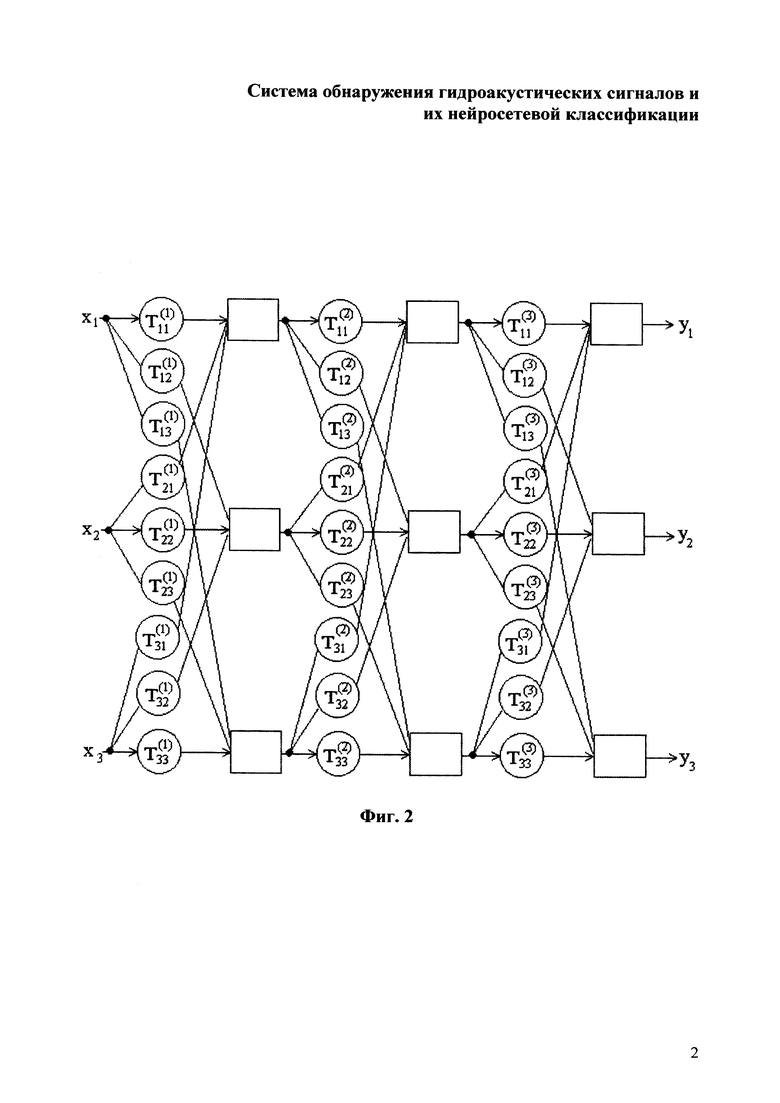
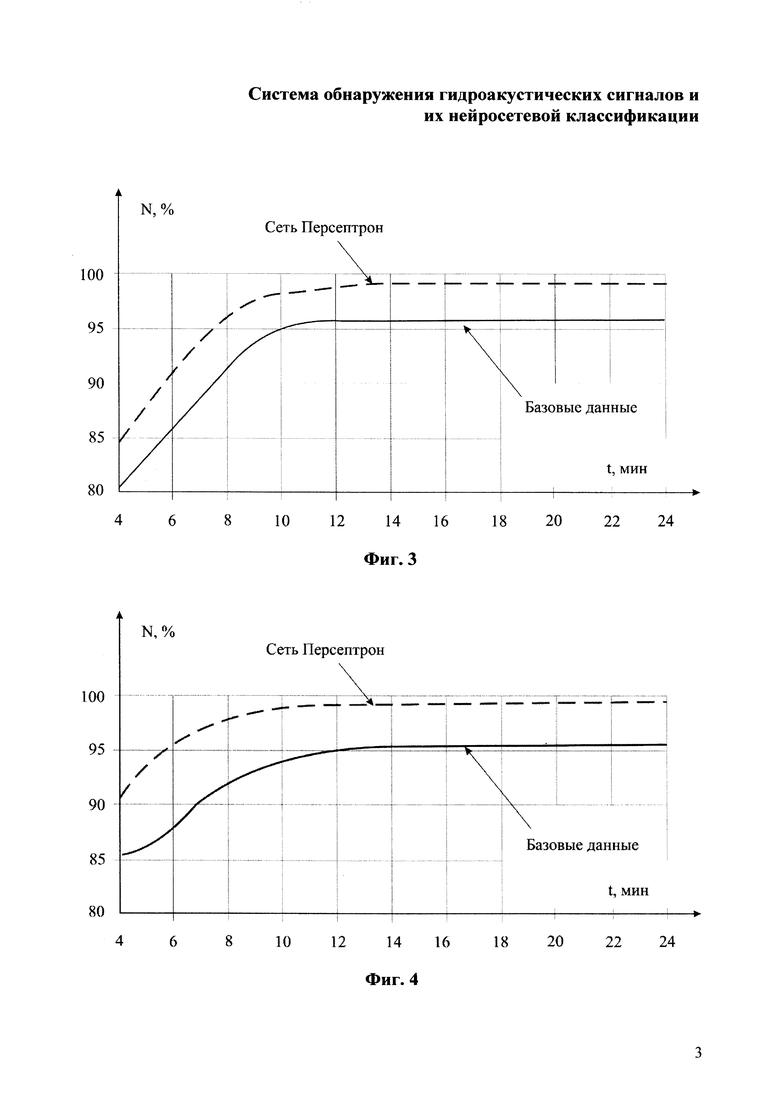
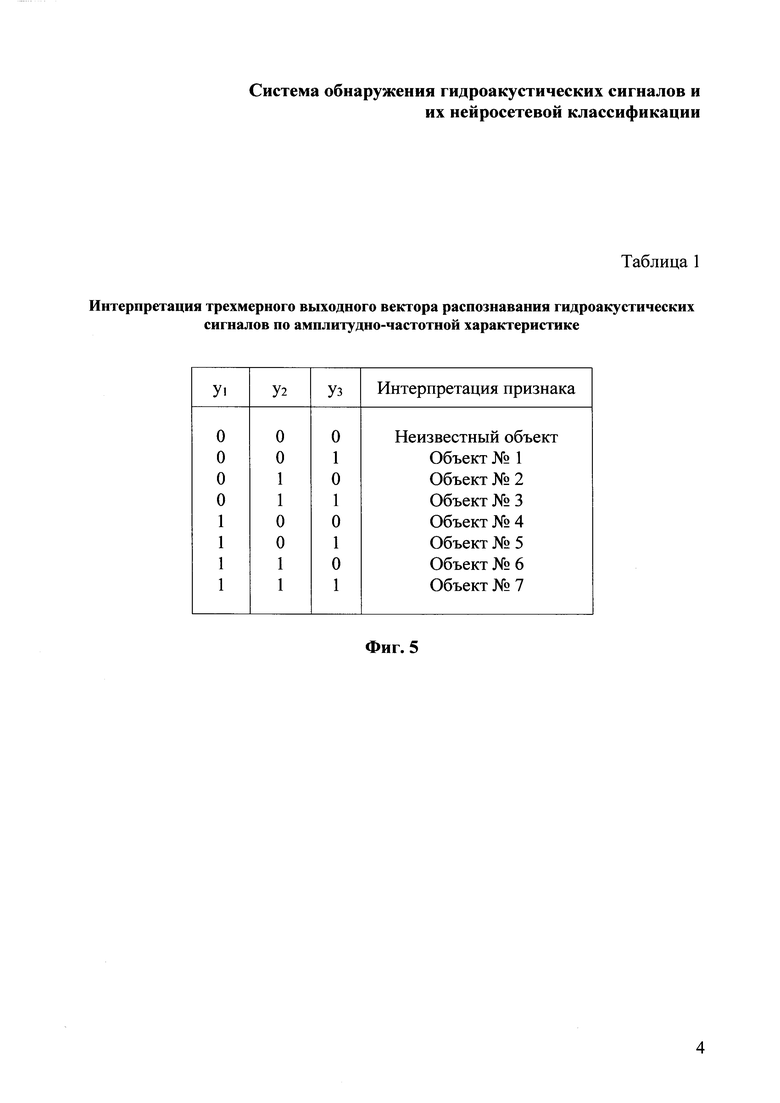
На фиг. 3 и фиг. 4 представлены результаты вычислительного эксперимента по определению коэффициента распознавания (классификации), определяемого как отношение числа распознанных объектов к общему числу испытаний в процентах, для надводных и подводных объектов в условиях зашумления сигнала в диапазоне от -10 до 20° дБ. Как видно из рисунков, распознавание и классификация морских целей с помощью вычислительных операций сети персептрон позволяет повысить вероятность классификации как надводных, так и подводных целей на 5-7%. На фиг. 5 приведена таблица интерпретации элиментов выходного вектора распознавания гидроакустических сигналов по амплитудно-частотной характеристике.
Система обнаружения гидроакустических сигналов и их нейросетевой классификации работает следующим образом.
На вход АЦП 1 поступает входной процесс x(t) с частотой дискретизации, удовлетворяющей требованиям теоремы Котельникова
С выхода АЦП 1 дискретные отсчеты поступают на вход рециркулятора 2, где формируется и с каждым новым отсчетом обновляется текущая дискретная выборка x(n) длиной N отсчетов.
Сформированная текущая дискретная выборка входного процесса x(n) поступает одновременно на входы М узкополосных фильтров 3.1-3.М.
С выходов М узкополосных фильтров 3.1-3.М М соответствующих узкополосных процессов одновременно поступают на первые входы М пар перемножителей 7.1.1, 7.2.1-7.1.М, 7.2.М, с выходов которых результаты перемножения поступают на входы М пар интеграторов 5.1.1, 5.2.1-5.1.М, 5.2.М. Время интегрирования в полосе каждого фильтра определяется выражением (1).
Из ПЗУ 8 на вторые входы М пар перемножителей 7.1.1, 7.2.1-7.1.М, 7.2.М поступают М пар синусных и косинусных составляющих (монохроматических) цифровых сигналов с частотами, соответствующими центральным частотам УПФ fm.
С выходов М пар интеграторов 5.1.1, 5.2.1-5.1.М, 5.2.М результаты интегрирования поступают на входы М пар квадраторов 4.1.1, 4.2.1-4.1.М, 4.2.М, с выходов которых квадраты откликов попарно поступают на входы М сумматоров 9.1-9.М, с выходов которых результаты суммирования поступают на входы М вычислителей квадратного корня 10.1-10.М, с выходов которых результаты вычислений поступают на входы М устройств задержки 11.1-11.М. Параметры задержки в каждом частотном канале определяются соотношением (2).
С выходов М устройств задержки 11.1-11.М отклики поступают на входы сумматора 9, с выхода которого результат суммирования поступает на вход порогового устройства 6, где принимается решение о наличии или отсутствии сигнала.
Далее сигнал с выхода порогового устройства 6 передается на вход блока распознавания класса цели по амплитудно-частотной характеристике 14.1 тракта нейросетевого распознавания и классификации целей 13. Задача распознавания и классификации надводных и подводных источников гидроакустических сигналов решается с помощью трехслойной нейронной сети, которая распознает семь объектов и позволяет выделить один неизвестный класс, что в перспективе позволит значительно расширить круг распознаваемых морских технических объектов
Анализ низкочастотной, среднечастотной и высокочастотной составляющих амплитудно-частотной характеристики производится раздельно, так как генеральные признаки для различных типов объектов могут находиться в различных частотных диапазонах. Как показано на фиг. 2, на каждый нейрон первого слоя через синапсы с весами {Tij(1)}, i=1, 2, 3; j=1, 2, 3 подаются все компоненты входного вектора 

Набор выходных сигналов блока распознавания класса цели по амплитудно-частотной характеристике 14.1 поступает в память блока обучения 14.2, где происходит сравнение результатов с математическими образами спектрограмм морских объектов для формирования вывода о степени принадлежности исследуемой области спектра объекту классификации, а настройка весовых коэффициентов распознающей сети определяется алгоритмом обратного распространения ошибки. Основная идея которого состоит в распространении сигналов ошибки от выходов сети к ее входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Для возможности применения метода обратного распространения ошибки необходимо, чтобы передаточная функция нейронов была дифференцируема. Сформированный третьим слоем распознающей нейронной сети сигнал по типу цели, согласно степени принадлежности исследуемой области спектра объекту классификации, поступает на выход блока 14.1, который является выходом системы.
Таким образом, используя оперативно обновляемую библиотеку математически обработанных образов спектрограмм морских целей и разработанную архитектуру распознающей нейронной сети в виде трехслойного персептрона, можно в автоматическом режиме распознавать класс цели по амплитудно-частотной характеристике и делать вывод о степени принадлежности исследуемой области спектра объекту классификации.
Предлагаемая система обнаружения гидроакустических сигналов и их нейросетевой классификации промышленно применима, так как для ее создания используются распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
Изобретение относится к области гидроакустики и может быть использовано для построения экспертных интеллектуальных систем распознавания и классификации источников гидроакустических сигналов, обнаруженных в режиме шумопеленгования. Система обнаружения гидроакустических сигналов и их нейросетевой классификации, содержащая аналого-цифровой преобразователь, на вход которого подается входной сигнал, а выход которого соединен с входом рециркулятора, выход которого соединен с входами М узкополосных фильтров. Выходы М узкополосных фильтров соединены с первыми входами Μ пар перемножителей, выходы которых соединены с входами Μ пар интеграторов, выходы которых соединены с входами Μ пар квадраторов. Выходы Μ пар квадраторов попарно соединены с входами Μ сумматоров, выходы которых соединены с входами М вычислителей квадратного корня, выходы которых соединены с входами Μ устройств задержки, выходы которых соединены с М входами сумматора, выход которого соединен с входом порогового устройства. 2М выходов постоянного запоминающего устройства соединены со вторыми входами М пар перемножителей. Выходы управляющего устройства соединены с управляющими входами аналого-цифрового преобразователя, рециркулятора, постоянного запоминающего устройства и порогового устройства. Принципиальным отличием от прототипа является, что дополнительно введен тракт нейросетевого распознавания и классификации целей, содержащий блок распознавания класса цели по амплитудно-частотной характеристике, охваченный обратной связью с блоком обучения. При этом выход порогового устройства соединен с входом блока распознавания класса цели по амплитудно-частотной характеристике, на выходе которого формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации. Техническим результатом изобретения является обеспечение автоматического распознавания и классификации надводных и подводных источников гидроакустических сигналов, обнаруженных в режиме шумопеленгования. 5 ил.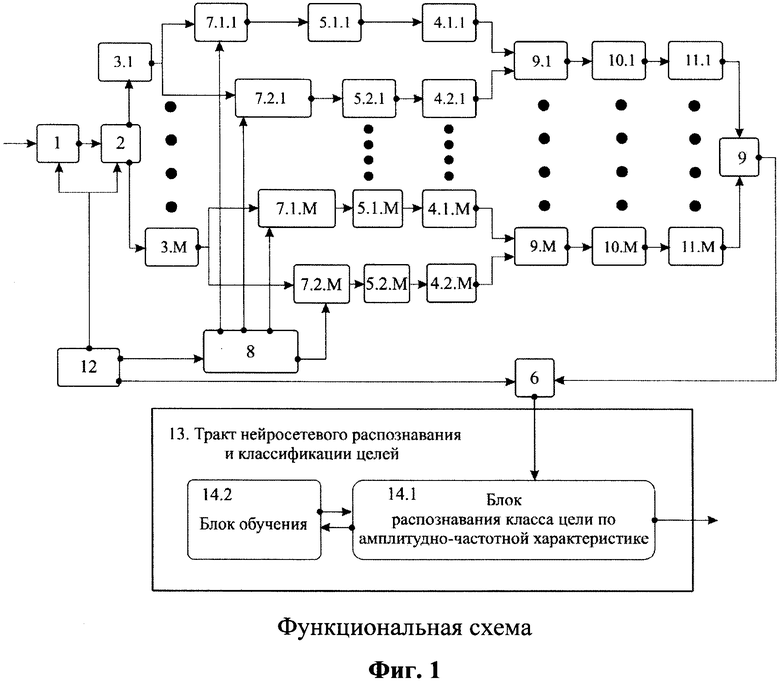
Система обнаружения гидроакустических сигналов и их нейросетевой классификации, содержащая аналого-цифровой преобразователь, на вход которого подается входной сигнал, а выход которого соединен с входом рециркулятора, выход которого соединен с входами М узкополосных фильтров, выходы которых соединены с первыми входами Μ пар перемножителей, выходы которых соединены с входами Μ пар интеграторов, выходы которых соединены с входами Μ пар квадраторов, выходы которых попарно соединены с входами Μ сумматоров, выходы которых соединены с входами М вычислителей квадратного корня, выходы которых соединены с входами Μ устройств задержки, выходы которых соединены с М входами сумматора, выход которого соединен с входом порогового устройства; 2М выходов постоянного запоминающего устройства соединены со вторыми входами М пар перемножителей; выходы управляющего устройства соединены с управляющими входами аналого-цифрового преобразователя, рециркулятора, постоянного запоминающего устройства и порогового устройства, отличающаяся тем, что дополнительно введен тракт нейросетевого распознавания и классификации целей, содержащий блок распознавания класса цели по амплитудно-частотной характеристике, охваченный обратной связью с блоком обучения; при этом выход порогового устройства соединен с входом блока распознавания класса цели по амплитудно-частотной характеристике, на выходе которого формируется сигнал по типу цели согласно степени принадлежности исследуемой области спектра объекту классификации.
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2011 |
|
RU2472116C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ ВОЛН ИЗ МОРСКОЙ СРЕДЫ В АТМОСФЕРУ И ОБРАТНО | 2015 |
|
RU2593625C2 |
| СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ГИДРОФИЗИЧЕСКИХ И ГЕОФИЗИЧЕСКИХ ВОЛН В МОРСКОЙ СРЕДЕ | 2013 |
|
RU2536836C1 |
| РАДИОГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН ИСТОЧНИКОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2015 |
|
RU2593673C2 |
| JP 8201500 A, 09.08.1996 | |||
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ В МОРСКОЙ СРЕДЕ | 2011 |
|
RU2474793C1 |

