Изобретение относится к области морской техники и может быть использовано в качестве устройства первичного гидроакустического наблюдения за подводной сигнально-помеховой обстановкой в системах, предназначенных для защиты акваторий от несанкционированного проникновения малошумных подводных объектов в районах охраняемых техногенных объектов (буровые вышки, приливные станции, морские станции экологического мониторинга, морские рубежи и т.д.).
Известны морские системы, которые предназначены для защиты морских рубежей и акваторий от подводных лодок противника, такие как широкополосная якорная мина Mk 60 «Captor» (см. Е.Я.Литвиненко, Г.Ю.Илларионов, В.В.Сидоренков. Характер современной минной угрозы и боевые возможности морского минного оружия. Монография: - С.-Петербург: Судостроение, 2005. - стр.32-33, состоящая на вооружении ВМФ США, и широкополосная самонаводящаяся миноторпеда CSM (см. Е.Я.Литвиненко, Г.Ю.Илларионов, В.В.Сидоренков. Характер современной минной угрозы и боевые возможности морского минного оружия. Монография: - С.-Петербург: Судостроение, 2005. - стр.83-84), состоящая на вооружении ВМФ Италии. Гидроакустическая пассивно-активная аппаратура обнаружения и классификации целей этих систем является наиболее близким аналогом заявляемого устройства и содержит пассивный тракт предварительного обнаружения, пеленгования и классификации (подводная лодка - надводный корабль), реагирующий на первичное гидроакустическое поле кораблей и подводных лодок, и активный тракт целеуказания и доклассификации (подводная лодка - имитатор), реагирующий на вторичное отраженное гидроакустическое поле. В качестве прототипа заявляемого устройства выбрана гидроакустическая аппаратура обнаружения и классификации целей широкополосной якорной мины Mk 60 «Captor».
Прототип содержит тракт шумопеленгования, предназначенный для обнаружения шумящей цели в зоне реагирования мины, определения направления на цель и предварительной ее классификации (подводная лодка - надводный корабль), реагирующий на первичное гидроакустическое поле кораблей и подводных лодок, и активный тракт, осуществляющий уточнение дистанции до цели и доклассификацию (подводная лодка - имитатор), реагирующий на вторичное отраженное гидроакустическое поле.
Прототип работает следующим образом. В дежурном режиме функционирует только тракт шумопеленгования. Классификация осуществляется путем анализа спектра шумоизлучения. Если обнаруженная трактом шумопеленгования цель классифицируется как подводная лодка, аппаратура мины переходит в режим слежения. В этом режиме тракт шумопеленгования последовательно переключается на прием сигналов более высокой частоты для уточнения направления на цель. Затем включается активный тракт. В активном режиме уточняется дистанция до цели и производится ее доклассификация (подводная лодка - имитатор). Оказавшийся в зоне реагирования мины имитатор акустического поля подводной лодки не вызовет срабатывания активного тракта. В силу малых размеров имитатора отраженный эхосигнал не будет соответствовать эхосигналу, отраженному от корпуса подводной лодки. В этом случае активный тракт выключается, и аппаратура мины переходит в режим шумопеленгования. При распознавании подводной лодки выдается команда на старт боевой части.
Успехи кораблестроителей в области постоянного снижения шумности подводных лодок привели к тому, что проблема предварительного обнаружения и пеленгования пассивными методами достигла в настоящее время критического состояния. Отношение сигнал/помеха на требуемых дистанциях обнаружения достигло столь низкого уровня, что не может быть скомпенсировано ни «накоплением» при обработке сигнала вследствие нестационарности помех, ни с помощью антенн больших волновых размеров вследствие раскорреляции сигнала на антенной решетке. При сложившихся к настоящему времени условиях в области обесшумливания подводных лодок радиус зоны обнаружения пассивных гидроакустических систем становится недостаточным. Простое же повышение пороговой чувствительности понижает их помехоустойчивость до неприемлемой величины.
Задачей изобретения является увеличение радиуса зоны обнаружения и повышение помехоустойчивости морских систем, предназначенных для защиты акваторий от несанкционированного проникновения малошумных подводных объектов при сохранении времени боевой службы системы на позиции.
Увеличение радиуса зоны обнаружения и повышение помехоустойчивости достигается тем, что в гидроакустическую пассивно-активную аппаратуру обнаружения и классификации целей вводится маломощный активный канал обнаружения и пеленгования. Для повышения достоверности обнаружения и обеспечения скрытности функционирования в качестве зондирующей посылки используется шумоподобный сигнал.
Маломощный активный канал обнаружения и пеленгования включает в себя равномерно ориентированные направленные широкополосные гидроакустические приемно-излучающие антенны, перекрывающие в совокупности пространство обзора в горизонтальной плоскости в пределах 360°, усилители мощности с регулируемым уровнем излучения, регулятор уровня излучения, устанавливающий уровень излучения усилителей мощности, соответствующий уровню гидроакустических шумов в полосе приема, задающий генератор, формирующий шумоподобную зондирующую посылку на усилители мощности и ее копию на опорные входы многоканальных квадратурных корреляторов, временной синхронизатор, задающий рабочий цикл маломощного активного канала обнаружения и пеленгования, логическое устройство, блокирующее рабочий цикл по сигналу от пассивного канала классификации, генератор сетки частот, генерирующий опорные сигналы для многоканальных квадратурных демодуляторов, перекрывающие в совокупности доплеровское расширение спектра эхосигнала, приемные каналы, осуществляющие многоканальную доплеровскую корреляционную обработку сигналов с выхода соответствующих приемно-излучающих антенн, решающее устройство, выполняющее сравнение сигналов на выходах многоканальных квадратурных корреляторов с пороговым значением и формирующее команду на включение активного тракта целеуказания и доклассификации. Каждый приемный канал состоит из последовательно включенных полосового частотно-избирательного усилителя, согласованного по полосе пропускания со спектром зондирующей посылки и доплеровским расширением спектра эхосигнала, многоканального квадратурного демодулятора и многоканального квадратурного коррелятора. Количество приемных каналов как и количество усилителей мощности равно числу приемно-излучающих антенн.
Предлагаемое построение устройства гидроакустического наблюдения за подводной сигнально-помеховой обстановкой позволяет увеличить радиус зоны обнаружения независимо от шумности подводного объекта, повысить вероятность правильного обнаружения и помехоустойчивость, обеспечить скрытность функционирования и минимизировать энергопотребление.
На фиг.1 приведена структурная схема заявляемого устройства гидроакустического наблюдения за подводной сигнально-помеховой обстановкой. На схеме показаны: пассивный канал классификации 1, активный канал целеуказания и доклассификации 2, маломощный активный канал обнаружения и пеленгования 3, включающий в себя четыре приемно-излучающие антенны 4, четыре усилителя мощности с регулируемым уровнем излучения 5, задающий генератор шумоподобной зондирующей посылки и ее копии 6, регулятор уровня излучения 7, генератор сетки частот 8, временной синхронизатор 9, логическое устройство 10, решающее устройство 11, четыре приемных канала 12, состоящие каждый из полосового частотно-избирательного усилителя 13, многоканального квадратурного демодулятора 14 и многоканального квадратурного коррелятора 15.
Выход канала предварительной классификации 1 подключен к входу логического устройства 10. Ко второму входу логического устройства 10 подключен один из двух выходов временного синхронизатора 9. Второй выход временного синхронизатора 9 подключен к одному из двух управляющих входов задающего генератора 6 и к управляющему входу решающего устройства 11. Выход логического устройства 10 подключен к управляющим входам регулятора уровня излучения 7 и временного синхронизатора 9, а также - ко второму управляющему входу задающего генератора 6. Один выход задающего генератора 6 подключен к сигнальным входам усилителей мощности 5, а другой выход - к опорным входам многоканальных квадратурных корреляторов 15. Выход каждого усилителя мощности 5 соединен с входом соответствующей приемно-излучающей антенны 4. Выход регулятора уровня излучения 7 соединен с управляющими входами усилителей мощности 5, а каждый из сигнальных входов - с выходом полосового частотно-избирательного усилителя 13 соответствующего приемного канала 12. Выходы генератора сетки частот 8 подключены к опорным входам многоканального квадратурного демодулятора 14 каждого из приемных каналов 12.
Количество выходов генератора сетки частот 8 для каждой из квадратурных составляющих равно числу доплеровских каналов. Количество доплеровских каналов определяется разрешающей способностью по частоте конкретно выбранной шумоподобной зондирующей посылки и максимальной скоростью объекта обнаружения. Количество опорных входов как и количество выходов многоканального квадратурного демодулятора 14 равно числу выходов генератора сетки частот 8.
Выход каждой приемно-излучающей антенны 4 подключен к входу полосового частотно-избирательного усилителя 13 соответствующего приемного канала 12. В каждом приемном канале 12 выход полосового частотно-избирательного усилителя 13 соединен с соответствующим сигнальным входом регулятора уровня излучения 7 и сигнальным входом многоканального квадратурного демодулятора 14, причем выходы последнего подключены к сигнальным входам многоканального квадратурного коррелятора 15.
Количество входов многоканального квадратурного коррелятора 15 равно числу выходов многоканального квадратурного демодулятора 14, а количество выходов - числу доплеровских каналов.
Выходы многоканальных квадратурных корреляторов 15 каждого приемного канала 12 подключены к соответствующим сигнальным входам решающего устройства 11. Количество входов решающего устройства 11 равно числу доплеровских каналов, умноженному на 4 (по количеству приемных каналов). Выход решающего устройства 11 подключен к входу активного канала целеуказания и доклассификации 2.
Заявляемое устройство работает следующим образом. При включении питания маломощный активный канал обнаружения и пеленгования 3 и пассивный канал классификации 1 работают в дежурном режиме.
Временной синхронизатор 9 задает рабочий цикл маломощного активного канала обнаружения и пеленгования 3 с определенной скважностью. Рабочий цикл состоит из процесса излучения зондирующей посылки и процесса обработки гидроакустических сигналов в рабочей зоне. Длительность рабочей зоны определяется временем прохождения зондирующим импульсом расстояния, равного удвоенному радиусу рабочей зоны.
По управляющему сигналу временного синхронизатора 9 задающий генератор 6 формирует шумоподобный зондирующий импульс, который усиливается усилителями мощности 5 и через приемно-излучающие антенны 4 излучается в водную среду. Мощность излучения зондирующего импульса определяется регулятором уровня излучения 7. Излученный импульс, отраженный от движущегося подводного объекта, в виде эхосигнала принимается приемно-излучающими антеннами 4, которые преобразуют его в электрический сигнал. С выхода каждой приемно-излучающей антенны 4 электрический сигнал поступает на вход соответствующего приемного канала 12, в котором подвергается усилению и частотной фильтрации полосовыми частотно-избирательными усилителями 13. Полоса усилителей 13 согласована со спектром зондирующей посылки и доплеровским расширением спектра эхо-сигнала, обусловленным скоростью движущегося подводного объекта. С выходов частотно-избирательных усилителей 13 сигнал последовательно поступает на входы соответствующих квадратурных демодуляторов 14. Опорные сигналы для квадратурных демодуляторов, перекрывающие в совокупности доплеровское расширение спектра эхосигнала, формируются генератором сетки частот 8. Квадратурные составляющие эхосигнала, полученные после демодуляции, поступают на входы соответствующих корреляторов 15. На выходе корреляторов 15 формируется сигнал, величина которого определяется временной сверткой текущего значения квадратурных составляющих на выходе демодуляторов 14 с копией излучаемого сигнала, формируемой задающим генератором 6. Выходные сигналы корреляторов 15 поступают на соответствующие входы решающего устройства 11. В решающем устройстве 11 выходные сигналы корреляторов 15 сравниваются с пороговым значением. При превышении порогового значения принимается решение о наличии в зоне обнаружения подводного объекта - нарушителя. Номер приемного канала 12, выходное напряжение которого превысило пороговое значение, определяет пространственный сектор, в котором произошло обнаружение подводного объекта. По окончании рабочей зоны на выходе решающего устройства 11 формируется управляющий сигнал на включение активного канала целеуказания и доклассификации 2, и через время, определяемое скважностью излучения зондирующей посылки, временной синхронизатор 9 возобновит рабочий цикл. Если активный канал целеуказания и доклассификации 2 подтвердит наличие в зоне обнаружения подводного объекта-нарушителя, то принимается окончательное решение о наличии в охраняемой зоне объекта-нарушителя. Информация об этом может передаваться на мобильные или стационарные средства наблюдения или использоваться для старта боевой части.
Если на протяжении рабочей зоны выходной сигнал приемных каналов 12 не превысит порогового значения в решающем устройстве 11, то по окончании рабочей зоны на выходе решающего устройства управляющий сигнал на включение активного канала целеуказания и доклассификации 2 не формируется, и временной синхронизатор 9 возобновит рабочий цикл. Это событие трактуется как отсутствие в охраняемой зоне подводного объекта-нарушителя.
При прохождении через зону обнаружения надводного корабля или неконтактного гидроакустического трала на выходе пассивного канала классификации 1 устанавливается логический сигнал, запрещающий излучение активным каналом обнаружения и пеленгования 3 зондирующей посылки. Соответственно не будет включения активного канала целеуказания и доклассификации 2. После прохода надводного корабля или неконтактного акустического трала через охраняемую зону логический сигал на выходе пассивного канала классификации 1 снимается, и временной синхронизатор 9 возобновляет рабочий цикл излучения зондирующей посылки, а также приема и обработки эхосигнала.
Совокупность описываемых признаков позволяет существенно увеличить радиус зоны обнаружения малошумных подводных объектов, повысить помехоустойчивость морских систем, предназначенных для защиты акваторий от несанкционированного проникновения, при сохранении времени боевой службы системы на позиции. Использование шумоподобного сигнала в качестве зондирующей посылки позволяет существенно улучшить работоспособность таких систем в условиях мелководья, сохранить длительный срок службы на боевой позиции без замены источника питания и обеспечить скрытность функционирования.
К моменту заявления разработан и изготовлен макет описываемого устройства гидроакустического наблюдения за подводной сигнально-помеховой обстановкой и проводятся его натурные испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство гидроакустического наблюдения за подводной сигнально-помеховой обстановкой | 2021 |
|
RU2772739C1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| Активный гидролокатор | 2019 |
|
RU2719214C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ ПО МНОГОЛУЧЕВОМУ КАНАЛУ СВЯЗИ | 2013 |
|
RU2573586C2 |
Устройство относится к области морской техники и может быть использовано в морских системах, предназначенных для защиты акваторий от несанкционированного проникновения малошумных подводных объектов в районах охраняемых техногенных объектов. Технический результат - увеличение радиуса обнаружения и повышение помехоустойчивости. Устройство содержит гидроакустическую пассивно-активную аппаратуру обнаружения и классификации целей, в которую введен маломощный активный канал обнаружения и пеленгования. Маломощный активный канал обнаружения и пеленгования включает в себя равномерно ориентированные направленные широкополосные гидроакустические приемно-излучающие антенны, перекрывающие в совокупности пространство обзора в горизонтальной плоскости в пределах 360°, усилители мощности с регулируемым уровнем излучения, регулятор уровня излучения, устанавливающий уровень излучения усилителей мощности, соответствующий уровню гидроакустических шумов в полосе приема, задающий генератор, формирующий шумоподобную зондирующую посылку на усилители мощности и ее копию на опорные входы многоканальных квадратурных корреляторов, временной синхронизатор, задающий рабочий цикл маломощного активного канала обнаружения и пеленгования, логическое устройство, блокирующее рабочий цикл по сигналу от пассивного канала классификации, генератор сетки частот, генерирующий опорные сигналы для многоканальных квадратурных демодуляторов, перекрывающие в совокупности доплеровское расширение спектра эхосигнала, приемные каналы, осуществляющие многоканальную доплеровскую корреляционную обработку сигналов с выхода соответствующих приемно-излучающих антенн, решающее устройство, выполняющее сравнение сигналов на выходах многоканальных квадратурных корреляторов с пороговым значением и формирующее команду на включение активного тракта целеуказания и доклассификации. Каждый приемный канал состоит из последовательно включенных полосового частотно-избирательного усилителя, согласованного по полосе пропускания со спектром зондирующей посылки и доплеровским расширением спектра эхосигнала, многоканального квадратурного демодулятора и многоканального квадратурного коррелятора. Количество приемных каналов как и количество усилителей мощности равно числу приемно-излучающих антенн. 1 ил.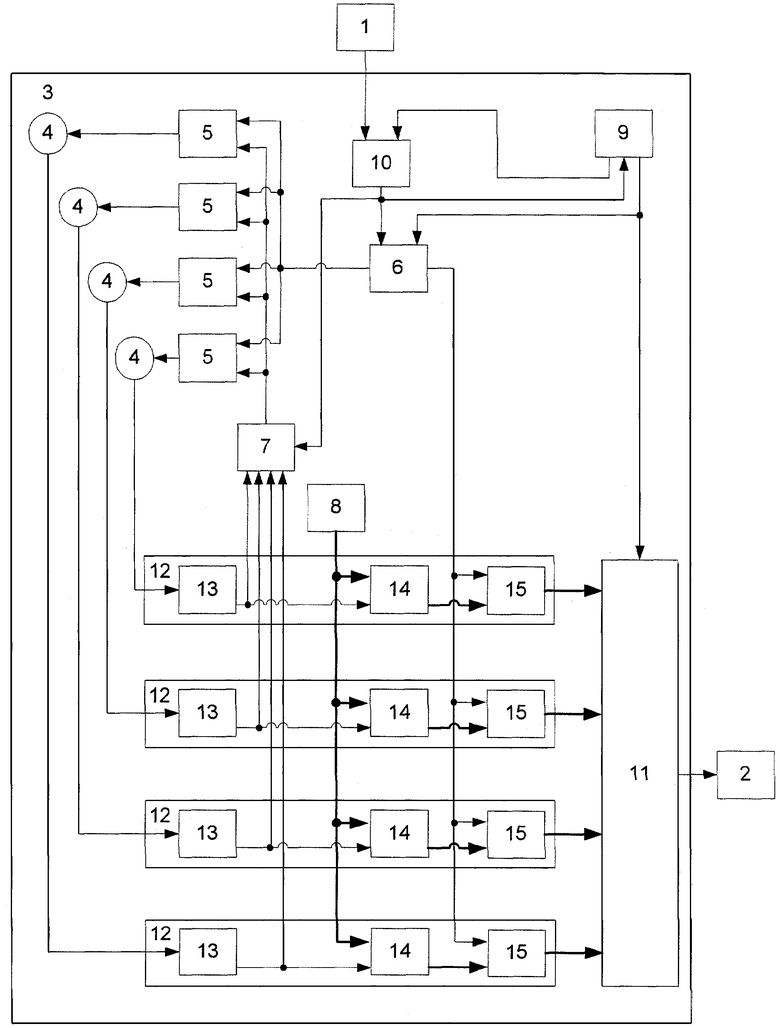
Устройство гидроакустического наблюдения за подводной сигнально-помеховой обстановкой, содержащее гидроакустическую пассивно-активную аппаратуру обнаружения и классификации целей, отличающееся тем, что оно снабжено маломощным активным каналом обнаружения и пеленгования, включающим в себя равномерно ориентированные направленные широкополосные гидроакустические приемно-излучающие антенны, перекрывающие в совокупности пространство обзора в горизонтальной плоскости в пределах 360°, усилители мощности с регулируемым уровнем излучения, число которых равно числу антенн, регулятор уровня излучения, устанавливающий уровень излучения усилителей мощности, соответствующий уровню гидроакустических шумов в полосе приема, задающий генератор, формирующий шумоподобную зондирующую посылку на усилители мощности и ее копию на опорные входы многоканальных квадратурных корреляторов, временной синхронизатор, задающий рабочий цикл маломощного активного канала обнаружения и пеленгования, логическое устройство, блокирующее рабочий цикл по сигналу от пассивного канала классификации, генератор сетки частот, генерирующий опорные сигналы для многоканальных квадратурных демодуляторов, перекрывающие в совокупности доплеровское расширение спектра эхосигнала, приемные каналы, количество которых равно числу приемно-излучающих антенн, осуществляющие каждый многоканальную доплеровскую корреляционную обработку сигнала с выхода соответствующей антенны, и состоящие из последовательно включенных полосового частотно-избирательного усилителя, согласованного по полосе пропускания со спектром зондирующей посылки и доплеровским расширением спектра эхосигнала, многоканального квадратурного демодулятора и многоканального квадратурного коррелятора, решающее устройство, сравнивающее уровень сигналов на выходах многоканальных квадратурных корреляторов с пороговым значением и формирующее команду на включение активного канала целеуказания и доклассификации.
| ЛИТВИНЕНКО Е.Я | |||
| и др | |||
| Характер современной минной угрозы и боевые возможности морского минного оружия | |||
| Монография | |||
| - СПб.: Судостроение, 2005, стр.32, 33 | |||
| US 6802236 B1, 12.10.2004 | |||
| DE 3532309 A1, 19.03.1987 | |||
| US 4185580 A, 29.01.1980. |

