Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к коммуникационным технологиям и, в частности, к способу и устройству для управления мощностью.
Уровень техники
С целью увеличения пропускной способности системы в стандарте «Долгосрочное развитие» усовершенствованной версии (Long Term Evolution-Advance, LTE-Адля краткости) применяют технологию агрегирования несущей.
Во время агрегирования несущей устройство пользователя (User Equipment, UE для краткости) обычно может агрегировать большее количество несущих нисходящей линии связи, тогда как может агрегировать гораздо меньшее количество несущих восходящей линии связи. Как правило, на основании канальной невзаимности для измерения некоторых каналов нисходящей линии связи измерение канала нисходящей линии связи осуществляют с использованием признака невзаимности канала, например, индекса матрицы предварительного кодирования (precoding matrix index, PMI для краткости) и зондирующего опорного сигнала восходящей линии связи (Sounding Reference Symbol, SRS для краткости). Поскольку пропускная способность несущей нисходящей линии связи UE больше, чем его агрегирующая способность несущей восходящей линии связи, то передачу по восходящей линии связи не выполняют на некоторых несущих в режиме дуплекса с временным разделением (дуплекс с временным разделением, TDD для краткости) для передачи UE по нисходящей линии связи. Для обеспечения своевременной SRS передачи требуется переключение несущей. Например, в первом подкадре используют несущую 1 и несущую 2 для передачи по нисходящей линии связи. При необходимости SRS передачи во втором подкадре, выполняют переключение несущей. Несущую 2 заменяют на несущую 3, и несущую 3 используют для SRS передачи. Дополнительно, необходимо контролировать мощность передачи SRS для обеспечения правильного приема SRS.
Установка параметра управления мощностью SRS предшествующего уровня техники зависит от некоторых параметров, относящиеся к управлению мощности физического общего канала восходящей линии связи (Physical Uplink Shared Channel, PUSCH, для краткости), тогда как UE не может получить параметры, относящиеся к управлению мощностью PUSCH на коммутируемой несущей, используемой для передачи SRS. В результате, управление мощностью SRS невозможно, и SRS не может быть корректно принят.
Раскрытие сущности изобретения
Варианты осуществления настоящего изобретения обеспечивают способ и устройство для управления мощностью, так что SRS передают на оптимальной мощности передачи на коммутируемой несущей, гарантируя корректный прием SRS.
Согласно первому аспекту, вариант осуществления настоящего изобретения обеспечивает способ управления мощностью, включающий в себя: получение параметра управления мощностью для зондирующего опорного сигнала SRS, где параметр управления мощностью для SRS включает в себя, по меньшей мере, один из значение параметра целевого уровня мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS; и определение мощности передачи для SRS на первой несущей на основании параметра управления мощностью для SRS. UE может вычислять мощность передачи для SRS на первой несущей на основании вновь сконфигурированного параметра управления мощностью для SRS, так что SRS передают на оптимальной мощности передачи на коммутируемой несущей, гарантируя корректный прием SRS.
В возможной реализации первая несущая является несущей, на который не отправляют PUSCH физический общий канал восходящей линии связи.
В возможной реализации, получение параметра управления мощностью для зондирующего опорного сигнала SRS включает в себя: прием сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, отправленной базовой станцией.
В возможной реализации сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
В возможной реализации, получение параметра управления мощностью для зондирующего опорного сигнала SRS включает в себя: получение параметра управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
В возможной реализации сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию RRC управления радиоресурсами или сигнализацию физического уровня.
С учетом вышеизложенных возможных реализаций UE может получить параметр управления мощностью для SRS различными способами. Способ получения параметра управления мощностью для SRS является гибким и отличается простотой в работе.
В возможной реализации значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS является значением параметра, полученным на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
В возможной реализации получение параметра управления мощностью из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей включает в себя: синтаксический разбор параметра управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей на основании первого временного идентификатора радиосети RNTI.
В возможной реализации определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: получение мощности передачи для SRS на основании, по меньшей мере, одного из максимальной мощности передачи устройства пользователя UE, значения регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значения параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи и оцененного значения потерь в тракте нисходящей линии связи.
В возможной реализации определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: вычисление мощности передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1, является шириной полосы пропускания передачи для SRS; является значением параметра целевой мощности для SRS, где j равно 0, 1 или 2; является коэффициентом компенсации потерь в тракте передачи; и является оцененным значением потерь в тракте нисходящей линии связи.
С вышеуказанными возможными реализациями UE может точно вычислить мощность передачи для SRS, чтобы обеспечить качество передачи SRS.
В возможной реализации до определения мощности передачи для SRS на основании параметра управления мощностью для SRS способ дополнительно включает в себя: определение, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
В возможной реализации, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью замкнутого контура для SRS, значение параметра управления мощностью замкнутого контура для SRS является абсолютным значением или относительным значением регулировки.
В возможной реализации до получения параметра управления мощностью для SRS способ дополнительно включает в себя: получение информации ТРС управления мощностью передачи, где информация ТРС является информацией, скремблированной с первым идентификатором RNTI радиосети.
В возможной реализации получение параметра управления мощностью для SRS включает в себя: синтаксический разбор значения параметра управления мощностью замкнутого контура для SRS из информации ТРС на основе первого RNTI.
В возможной реализации, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью замкнутого контура для SRS, до получения параметра управления мощностью для SRS способ дополнительно включает в себя: получение DCI информации управления нисходящей линии связи.
В возможной реализации, получение параметра управления мощностью для SRS включает в себя: получение значения параметра управления мощностью замкнутого контура для SRS на основании DCI.
В возможной реализации, если DCI является информацией управления, полученной на второй несущей, то DCI включает в себя, по меньшей мере, первый индекс несущей.
В возможной реализации, второй несущий является коммутационная несущая или любая несущая, отличная от коммутационной несущей, и первая несущая является коммутационной несущей.
В возможной реализации, получение значения параметра управления мощностью замкнутого контура для SRS на основании DCI включает в себя: получение значения параметра управления мощностью замкнутого контура для SRS на несущей, соответствующей первому индексу несущей.
В возможной реализации, если DCI является информацией управления, полученной на первой несущей, получение значения параметра управления мощностью замкнутого контура для SRS на основании DCI включает в себя: получение значения параметра управления мощностью замкнутого контура для SRS из DCI.
С учетом вышеизложенных возможных реализаций, UE может получить значение параметра управления мощностью замкнутого контура для SRS различными способами. Дополнительно, определяют новый формат DCI, так что UE может получить полный параметр управления мощностью для SRS, чтобы обеспечить надежность передачи SRS.
В возможной реализации, если значение параметра управления мощностью замкнутого контура для SRS является относительным значением регулировки, способ дополнительно включает в себя:
определение значения параметра управления мощностью замкнутого контура для SRS на основании, по меньшей мере, одного из информации управления мощностью замкнутого контура или относительного значения регулировки для SRS в предшествующем подкадре.
В возможной реализации, определение значения параметра управления мощностью замкнутого контура для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре включает в себя: вычисление значения параметра управления мощностью замкнутого контура для SRS по формуле, где является информацией управления мощностью в замкнутом контуре для SRS в предшествующем подкадре; является значением относительной регулировки; и если SRS сконфигурирован периодически, то является периодичностью подкадра SRS или, если SRS сконфигурирован апериодически, то i- является номером подкадра предшествующего подкадра.
В возможной реализации, определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: получение мощности передачи для SRS на основании, по меньшей мере, одной из максимальной мощности передачи устройства пользователя UE, значения регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значения параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи, оцененного значения потерь в тракте нисходящей линии связи и параметра управления мощностью в замкнутом контуре для SRS.
В возможной реализации, определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: вычисление мощности передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания передачи для SRS; является значением параметра целевой мощности для SRS; является коэффициентом компенсации потерь в тракте передачи; является оценочным значением потерь в тракте нисходящей линии связи; и является значением параметра управления мощностью в замкнутом контуре для SRS.
С учетом вышеизложенных возможных реализаций UE может точно вычислить мощность передачи для SRS в условиях замкнутого контура, чтобы гарантировать корректный прием SRS в различных условиях.
В соответствии со вторым аспектом, вариант осуществления настоящего изобретения предлагает способ управления мощностью, включающий в себя: получение мощности передачи на участке перекрытия символа первого подкадра и второго подкадра, где первый подкадр является подкадром, в котором зондирующий опорный сигнал SRS передают на первой несущей, и второй подкадр является подкадром, в котором SRS или физический канал передают на второй несущей; и, если мощность передачи больше максимальной мощности передачи устройства пользователя UE, управление мощностью передачи подлежащего передаче сигнала, где подлежащий передаче сигнал включает в себя SRS и/или физический канал.
В возможной реализации, до управления мощностью передачи подлежащего передаче сигнала способ дополнительно включает в себя: определение, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
В возможной реализации, управление мощностью передачи подлежащего передаче сигнала включает в себя: управление мощностью передачи подлежащего передаче сигнала на основании периодической конфигурации SRS; или управления мощностью передачи подлежащего передаче сигнала на основании апериодической конфигурации SRS.
В возможной реализации, если SRS сконфигурирован периодически, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или масштабирование мощности для SRS.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является PUSCH физическим общим каналом восходящей линии связи, и PUSCH не включает в себя UCI информацию управления восходящей линии связи, то управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание PUSCH или выполнение масштабирования мощности для PUSCH.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является PUSCH физическим общим каналом восходящей линии связи и PUSCH включает в себя UCI информацию управления восходящей линии связи, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или выполнение масштабирования мощности для SRS.
В возможной реализации, если SRS сконфигурирован апериодически, и физический канал является PUCCH физическим каналом управления восходящей линии связи, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или выполнение масштабирования мощности для SRS; или отбрасывание PUCCH или выполнение масштабирования мощности для PUCCH.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал представляет собой PUCCH физический канал управления восходящей линии связи, и PUCCH включает в себя гибридный автоматический запрос повторения HARQ, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или выполнение масштабирования мощности для SRS.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал представляет собой PUCCH физический канал управления восходящей линии связи, и PUCCH включает в себя только CSI информацию состояния канала, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или выполнение масштабирования мощности для SRS; или отбрасывание PUCCH или выполнение масштабирования мощности для PUCCH.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является PRACH физическим каналом с произвольным доступом, и PRACH является совмещенным, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или выполнение масштабирования мощности для SRS.
Принцип реализации и полезный эффект способа управления мощностью, предусмотренного в этом варианте осуществления, аналогичны принципам первого аспекта, и подробности не описаны повторно.
В соответствии с третьим аспектом, вариант осуществления настоящего изобретения относится к способу управления мощностью, где способ включает в себя: получение параметра управления мощностью для SRS зондирующего опорного сигнала на первой несущей, где параметр управления мощностью для SRS включает в себя, по меньшей мере, одно из значения параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS; и отправку параметра управления мощностью для SRS в устройство пользователя UE, так что UE определяет мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
В возможной реализации первая несущая является несущей, на которой не передают физический общий канал восходящей линии связи PUSCH.
В возможной реализации отправка параметра управления мощностью для SRS в устройство пользователя UE включает в себя: отправку параметра управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
В возможной реализации сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
В возможной реализации сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
В возможной реализации значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS является значением параметра, полученным на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
В возможной реализации отправка параметра управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления перекрестной несущей включает в себя: скремблирование параметра управления мощностью для SRS на основании первого временного идентификатора радиосети RNTI для генерирования сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей; и отправку сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей в UE.
В возможной реализации SRS конфигурируют периодически или конфигурируют апериодически.
В возможной реализации, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулировки.
В возможной реализации способ дополнительно включает в себя: отправку информации управления мощностью передачи в UE, так что UE выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС, где информация ТРС является скремблированной информацией с первым временным идентификатором радиосети RNTI.
В возможной реализации, если параметр управления мощностью для SRS включает в себя параметр управления мощностью в замкнутом контуре для SRS, способ дополнительно включает в себя: отправку информации управления нисходящей линии связи DCI в UE, так что UE получает значение управления мощностью в замкнутом контуре для SRS на основании DCI.
В возможной реализации, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, индекс первой несущей, и DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу первой несущей.
В возможной реализации второй несущий является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
В возможной реализации, если DCI представляет собой информацию управления, полученную на первой несущей, DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Принцип реализации и полезный эффект способа управления мощностью, предусмотренного в этом варианте осуществления, аналогичны принципам первого аспекта, и подробности здесь не описаны.
В соответствии с четвертым аспектом вариант осуществления настоящего изобретения обеспечивает устройство для управления мощностью, включающее в себя:
модуль получения, выполненный с возможностью получать параметр управления мощностью для зондирующего опорного сигнала SRS, где параметр управления мощностью для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS; и
модуль определения, выполненный с возможностью определять мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
В возможной реализации первая несущая является несущей, на который не передают физический общий канал восходящей линии связи PUSCH.
В возможной реализации модуль получения специально выполнен с возможностью принимать сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, отправленную базовой станцией.
В возможной реализации сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
В возможной реализации модуль получения дополнительно конкретно выполнен с возможностью получать параметр управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
В возможной реализации сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
В возможной реализации значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы; или
значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
В возможной реализации, модуль получения получает параметр управления мощностью из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, что включает в себя:
модуль получения выполняет синтаксический разбор параметра управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей на основании первого временного идентификатора радиосети RNTI.
В возможной реализации модуль определения конкретно выполнен с возможностью получать мощность передачи для SRS на основании, по меньшей мере, одного из максимальной мощности передачи устройства пользователя UE, значения регулировки мощности передачи для SRS, полосы пропускания передачи для SRS, значения параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи и оцененного значения потерь в тракте нисходящей линии связи.
В возможной реализации модуль определения конкретно выполнен с возможностью вычислять мощность передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания для SRS; является значением параметра целевой мощности для SRS, где j равно 0, 1 или 2; является коэффициентом компенсации потерь в тракте передачи; и является оцененным значением потерь в тракте нисходящей линии связи.
В возможной реализации модуль определения дополнительно выполнен с возможностью определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
В возможной реализации, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, то значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулировки.
В возможной реализации модуль получения дополнительно выполнен с возможностью получать информацию управления мощностью передачи ТРС, где информация ТРС является информацией, скремблированной с первым временным идентификатором радиосети RNTI.
В возможной реализации, модуль получения получает параметр управления мощностью для SRS, что включает в себя:
модуль получения выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС на основании первого RNTI.
В возможной реализации, если параметр управления мощностью для SRS включает значение параметра управления мощностью в замкнутом контуре для SRS,
модуль получения дополнительно выполнен с возможностью получать информацию управления нисходящей линии связи DCI.
В возможной реализации, модуль получения получает параметр управления мощностью для SRS, что включает в себя:
модуль получения получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
В возможной реализации, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, первый индекс несущей.
В возможной реализации второй несущий является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
В возможной реализации, модуль получения получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, что включает в себя:
модуль получения получает значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу первой несущей.
В возможной реализации, если DCI является информацией управления, полученной на первой несущей,
модуль получения получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, что включает в себя:
модуль получения получает значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
В возможной реализации, если значение параметра управления мощностью в замкнутом контуре для SRS является относительным значением регулировки,
модуль определения дополнительно выполнен с возможностью определять значения параметра управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре.
В возможной реализации, модуль определения определяет параметр управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре, что включает в себя:
модуль определения вычисляет значение параметра управления мощностью в замкнутом контуре для SRS в соответствии с формулой, где является информацией управления мощностью в замкнутом контуре для SRS в предшествующем подкадре; является значением относительной регулировки; и если SRS сконфигурирован периодически, является периодичностью подкадра SRS или, если SRS сконфигурирован апериодически, i- является номером подкадра предшествующего подкадра.
В возможной реализации, модуль определение определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя:
модуль определения получает мощность передачи для SRS на основании, по меньшей мере, одной из максимальной мощности передачи устройства пользователя UE, значения регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значения параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи, оцененное значение потерь в тракте нисходящей линии связи и параметр управления мощностью в замкнутом контуре для SRS.
В возможной реализации, модуль определения определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя:
модуль определения вычисляет мощность передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания передачи для SRS; является значением параметра целевой мощности для SRS; является коэффициентом компенсации потерь в тракте передачи; является оценочным значением потери в тракте нисходящей линии связи; и является значением параметра управления мощностью в замкнутом контуре для SRS.
Принцип реализации и полезный эффект устройства для управления мощностью, предусмотренного в этом варианте осуществления, аналогичны принципам первого аспекта, и подробности здесь не описаны.
В соответствии с пятым аспектом вариант осуществления настоящего изобретения обеспечивает устройство для управления мощностью, включающее в себя:
модуль получения, выполненный с возможностью получать мощность передачи в участке перекрытия символа первого подкадра и второго подкадра, где первый подкадр является подкадром, в котором передают зондирующий опорный сигнал SRS на первой несущей, и второй подкадр является подкадром, в котором передают SRS или физический канал на второй несущей; и
модуль обработки, выполненный с возможностью, если мощность передачи больше максимальной мощности передачи устройства пользователя UE, управлять мощностью передачи подлежащего передаче сигнала, где подлежащий передаче сигнал включает в себя SRS и/или физический канал.
В возможной реализации модуль обработки дополнительно выполнен с возможностью определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
В возможной реализации, модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки управляет мощностью передачи подлежащего передаче сигнала на основании периодической конфигурации SRS; или
модуль обработки управляет мощностью передачи подлежащего передаче сигнала на основании апериодической конфигурации SRS.
В возможной реализации, если SRS сконфигурирован периодически, модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является физическим общим каналом восходящей линии связи PUSCH, и PUSCH не включает в себя информацию управления восходящей линии связи UCI,
модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает PUSCH или выполняет масштабирование мощности для PUSCH.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является физическим общим каналом восходящей линии связи PUSCH, и PUSCH включает в себя информацию управления восходящей линии связи UCI,
модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является физическим каналом управления восходящей линии связи PUCCH,
модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает SRS или выполняет масштабирование мощности для SRS; или
модуль обработки отбрасывает PUCCH или выполняет масштабирование мощности для PUCCH.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является физическим каналом управления восходящей линии связи PUCCH, и PUCCH включает в себя гибридный автоматический запрос повторения HARQ,
модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является физическим каналом управления восходящей линии связи PUCCH, и PUCCH включает в себя только информацию состояния канала CSI,
модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает SRS или выполняет масштабирование мощности для SRS; или
модуль обработки отбрасывает PUCCH или выполняет масштабирование мощности для PUCCH.
В возможной реализации, если SRS сконфигурирован апериодически, физический канал является каналом произвольного доступа PRACH, и PRACH является совмещенным,
модуль обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя:
модуль обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
Принцип реализации и полезный эффект устройства для управления мощностью, предусмотренного в этом варианте осуществления, аналогичны принципам первого аспекта, и подробности здесь не описаны.
В соответствии с шестым аспектом вариант осуществления настоящего изобретения обеспечивает устройство для управления мощностью, включающее в себя:
модуль получения, выполненный с возможностью получать параметр управления мощностью для зондирующего опорного сигнала SRS на первой несущей, где параметр управления мощности для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS; и
модуль отправки, выполненный с возможностью отправлять параметр управления мощностью для SRS в устройство пользователя UE, так что UE определяет мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
В возможной реализации первая несущая является несущей, на которой не передают физический Общий канал восходящей линии связи PUSCH.
В возможной реализации модуль отправки конкретно выполнен с возможностью отправлять параметр управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления перекрестной несущей.
В возможной реализации сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
В возможной реализации сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
В возможной реализации значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы; или
значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
В возможной реализации, модуль отправки отправляет параметр управления мощностью для SRS в UE, используя сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, что включает в себя:
модуль отправки скремблирует параметр управления мощностью для SRS на основании первого временного идентификатора радиосети RNTI, чтобы генерировать сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей; и отправляет сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей в UE.
В возможной реализации SRS конфигурирует периодически или конфигурирует апериодически.
В возможной реализации, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулировки.
В возможной реализации модуль отправки дополнительно выполнен с возможностью отправлять информацию управления мощностью передачи ТРС в UE, так что UE выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС, где информация ТРС является информацией, скремблированной с первым временным идентификатором радиосети RNTI.
В возможной реализации, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS,
модуль отправки дополнительно выполнен с возможностью отправлять информацию управления нисходящей линии связи DCI в UE, так что UE получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
В возможной реализации, если DCI представляет собой информацию управления, полученную на второй несущей, DCI включает в себя, по меньшей мере, индекс первой несущей, и DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу первой несущей.
В возможной реализации второй несущий является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
В возможной реализации, если DCI является информацией управления, полученной на первой несущей, DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Принцип реализации и полезный эффект устройства управления мощностью, предусмотренного в этом варианте осуществления, аналогичны принципам первого аспекта, и подробности здесь не описаны.
Краткое описание чертежей
С целью более подробного описания технических решений в вариантах осуществления настоящего изобретения или в предшествующем уровне техники, нижеследующее кратко описывает прилагаемые чертежи, необходимые для описания вариантов осуществления или предшествующего уровня техники. Очевидно, что прилагаемые чертежи в нижеследующем описании показывают некоторые варианты осуществления настоящего изобретения, и специалисты в данной области техники могут все еще получать другие чертежи из этих сопроводительных чертежей без творческих усилий.
Фиг. 1 представляет собой схему сценария использования способа управления мощностью согласно варианту осуществления настоящего изобретения;
Фиг. 2 представляет собой блок-схему последовательности операций способа управления мощностью согласно варианту 1 осуществления настоящего изобретения;
Фиг. 3 представляет собой блок-схему последовательности операций способа управления мощностью согласно варианту 2 осуществления настоящего изобретения;
Фиг. 4 представляет собой блок-схему последовательности операций способа управления мощностью согласно варианту 3 осуществления настоящего изобретения;
Фиг. 5 представляет собой блок-схему последовательности операций способа управления мощностью согласно варианту 4 осуществления настоящего изобретения;
Фиг. 6 представляет собой схему устройства для управления мощностью согласно варианту 5 осуществления настоящего изобретения;
Фиг. 7 представляет собой схему устройства управления мощностью согласно варианту 6 осуществления настоящего изобретения;
Фиг. 8 представляет собой схему устройства для управления мощностью согласно варианту 7 осуществления настоящего изобретения;
Фиг. 9 представляет собой схему UE согласно варианту 8 осуществления настоящего изобретения; и
Фиг. 10 представляет собой схему базовой станции согласно варианту 9 осуществления настоящего изобретения.
Осуществление изобретения
Фиг. 1 представляет собой схему сценария применения способа управления мощностью согласно варианту осуществления настоящего изобретения. Способ применяют к системе беспроводной связи, например, к LTE-A системе. Как показано на фиг. 1, сценарий включает в себя сетевое устройство 1, пользовательский терминал 2 и пользовательский терминал 3. Способ управления мощностью, предоставляемый в настоящем изобретении, в основном, используют для передачи данных между сетевым устройством и пользовательским терминалом. Следует отметить, что сценарий может дополнительно включать в себя другие сетевые устройства и другие пользовательские терминалы. Фиг. 1 является просто примером для описания и не налагает никаких ограничений.
Пользовательский терминал, используемый в этом варианте осуществления настоящего изобретения, может быть устройством, которое обеспечивает голосовую передачу и/или данных для пользователя, карманным устройством с функцией беспроводного соединения или другим устройством обработки, подключенное к модему беспроводной связи. Терминал беспроводной связи может устанавливать связь с одной или несколькими базовыми сетями через сеть радиодоступа (сеть радиодоступа, RAN для краткости). Терминал беспроводной связи может быть мобильным терминалом, таким как мобильный телефон (также называемый «сотовым» телефоном) или компьютером, снабженным мобильным терминалом, и, например, может быть переносным мобильным устройством, портативным мобильным устройством, карманным мобильным устройством, встроенным в компьютер мобильным устройством или мобильным устройством, которое обеспечивает обмен голосовыми сигналами и/или данными с сетью радиодоступа.
Сетевое устройство, используемое в этом варианте осуществления настоящего изобретения, может представлять собой базовую станцию, точку доступа или устройство, устанавливающее связь с терминалом беспроводной связи через один или несколько секторов радиринтерфейса в сети доступа. Базовая станция может быть выполнена с возможностью преобразовывать принятый радиокадр в IP-пакет и преобразовывать принятый IP-пакет в радиокадр и служить в качестве маршрутизатора между терминалом беспроводной связи и остальной частью сети доступа, где остальная часть сети доступа может включать в себя сеть интернет-протокола (IP). Базовая станция может координировать управление атрибутами радиоинтерфейса. Например, базовая станция может быть базовой станцией в GSM или CDMA (базовая приемопередающая станция, BTS для краткости), может быть базовой станцией в WCDMA (NodeB) или может быть развитым узлом В в LTE (NodeB, eNB или e-NodeB, развитый узел В). Данный аспект в настоящем изобретении не ограничен.
Фиг. 2 представляет собой блок-схему последовательности операций способа управления мощностью согласно первому варианту осуществления настоящего изобретения, где способ выполняют устройством пользователя UE. Как показано на фиг. 2, способ включает в себя следующие этапы.
Этап 101: Получают параметр управления мощностью для зондирующего опорного сигнала SRS, где параметр управления мощностью для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS.
В этом варианте осуществления UE может получить параметр управления мощностью для SRS различными способами. Например, базовая станция передает предварительно сконфигурированный параметр управления мощностью для SRS в UE с использованием коммутируемой из или коммутируемой в несущей для передачи SRS. В качестве альтернативы, базовая станция отправляет значение параметра целевой мощности для SRS и коэффициент компенсации потерь в тракте передачи в UE посредством использования сигнализации физического уровня или сигнализации управления, и затем указывает значение параметра управления мощностью в замкнутом контуре для SRS в UE, используя информацию управления мощностью передачи (управление мощностью передачи, ТРС). Альтернативно, могут быть получены различные значения параметра управления мощностью для SRS другими способами.
Этап 102: Определяют мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
В этом варианте осуществления первая несущая является коммутируемой на несущую после переключения несущей на основе SRS, и также упоминается как несущая невосходящей линии связи, для выполнения передачи SRS на несущей. UE может вычислять мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS, так что SRS отправляют на первой несущей с соответствующей мощностью передачи.
В способе управления мощностью, предоставленном в этом варианте осуществления, UE получает параметр управления мощностью для SRS, где параметр управления мощностью включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS и определяет мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS. UE может вычислять мощность передачи для SRS на коммутируемой на несущую на основании вновь сконфигурированного параметра управления мощностью для SRS, так что SRS передают с оптимальной мощностью передачи на коммутируемой несущей, гарантируя корректный прием SRS.
Возможно, в варианте осуществления, показанном на фиг. 2, первая несущая является несущей на который не передают физический общий канал восходящей линии связи (Physical Uplink Shared Channel, PUSCH для краткости). To есть, первую несущую используют для отправки SRS, но не для отправки PUSCH.
Фиг. 3 иллюстрирует блок-схему последовательности операций способа управления мощностью согласно варианту 2 осуществления настоящего изобретения, и способ, показанный на фиг. 3 представляет собой конкретный процесс реализации на этапе 101. Как показано на фиг. 3, способ включает в себя следующие этапы.
Этап 201: Принимают сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, отправленную базовой станцией, где сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
В этом варианте осуществления базовая станция может доставлять сигнализацию управления мощностью в UE посредством использования сигнализации управления мощностью на коммутируемой в несущей в UE или может указывать сигнализацию управления мощностью в UE с использованием сигнализации управления мощностью перекрестной несущей. Сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию, которую принимают на коммутируемой из несущей, на которой передают SRS, или на любой несущей, отличной от коммутируемой в несущую, и которую используют для уведомления о соответствующей конфигурации мощности для передачи SRS на коммутируемой в несущей после переключения несущей на основании SRS. Другими словами, сигнализация управления мощностью перекрестной несущей является сигнализацией, отправленной базовой станцией на коммутируемой из несущей или любой несущей, отличной от коммутируемой в несущей, и сигнализация включает в себя параметр управления мощностью для SRS на коммутируемой в несущей. Сигнализация управления мощностью с разомкнутом контуре может включать в себя значение параметра целевой мощности для SRS и коэффициент компенсации потерь в тракте передачи. Сигнализация управления мощностью в замкнутом контуре может включать в себя значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS.
Возможно, сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами (управление радиоресурсами, RRC) или сигнализацию физического уровня.
Этап 202: Получают параметр управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
В этом варианте осуществления после того, как UE принимает сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, доставленную базовой станцией, UE выполняет синтаксический разбор сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, чтобы получить параметр управления мощностью для SRS.
Возможно, значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании первоначального принятого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS является значением параметра, полученным на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
В этом варианте осуществления базовая станция может отправить начальное принимаемое значение целевой мощности преамбулы в UE с использованием сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, и UE рассчитывает значение параметра целевой мощности для SRS на основании принимаемого значения целевой мощности преамбулы. В качестве альтернативы, базовая станция может вычислять значение параметра целевой мощности для SRS путем добавления начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности, и затем отправить рассчитанное значение параметра целевой мощности для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей. Значение регулировки мощности может альтернативно быть получено из ответного сообщения специально определенного канала произвольного доступа (канал произвольного доступа, RACH для краткости). Значение регулировки мощности также упоминается как смещение мощности или смещение мощности (смещение мощности).
Дополнительно, получение параметра управления мощностью из сигнализации управления мощностью или сигнализации управления перекрестной несущей включает в себя: синтаксический разбор параметра управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей на основании первого временного идентификатора радиосети (временной идентификатор радиосети, RNTI для краткости).
В этом варианте осуществления первый RNTI отличается отТРС-RNTI предшествующего уровня техники. Первый RNTI представляет собой RNTI, который в настоящем изобретении переопределен, и первый RNTI может называться TPC-SRS-RNTI. Первый RNTI используют для скремблирования (скремблирования) или маскировки (маскировки) параметра управления мощностью для SRS, и скремблированный параметр передают в сигнализации физического уровня для индикации в UE.
В способе управления мощностью, предусмотренном в этом варианте осуществления, UE принимает сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, отправленную базовой станцией, и получает параметр управления мощностью для SRS из сигнализации управления мощностью или сигнализация управления мощностью перекрестной несущей. Базовая станция может указывать параметр управления мощностью для SRS для UE с использованием сигнализации RRC, сигнализации MAC или сигнализации физического уровня и может дополнительно скремблировать параметр управления мощностью для SRS с использованием вновь определенного RNTI. Базовая станция указывает параметр управления мощностью для SRS для UE различными способами. Этот способ является гибким и отличается простотой в работе.
Возможно, определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: получение мощности передачи для SRS на основании, по меньшей мере, одного из максимальной мощности передачи устройства пользователя UE, значение регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и оцениваемое значение потерь в тракте нисходящей линии связи.
В частности, в случае с разомкнутого контура, определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: вычисление мощности передачи для SRS по формуле, где является максимальной мощностью передачи устройства пользователя UE в i-й подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1, является шириной полосы пропускания передачи для SRS; является значением параметра целевой мощности для SRS, где j равно 0,1 или 2; является коэффициентом компенсации потерь в тракте передачи; и является оцененным значением потерь в тракте нисходящей линии связи, может быть зафиксировано на 1, а для, как правило, j равно 2. Когда j равно 0, является мощностью передачи полупостоянного планирования; когда j равно 1, представляет собой мощность передачи динамического планирования; и когда j равно 2, представляет собой мощность передачи данных произвольного доступа.
Дополнительно, перед определением мощности передачи для SRS на основании параметра управления мощностью для SRS способ дополнительно включает в себя: определение, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
В этом варианте осуществления UE может определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически, и затем определяют мощность передачи для SRS на основании периодической конфигурации, характерной для SRS и параметра управления мощностью для SRS для обеспечения корректного приема SRS в различных условиях.
Возможно, в случае замкнутого контура, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулирования.
В этом варианте осуществления, если значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением, то абсолютное значение может быть непосредственно использовано для вычисления мощности передачи для SRS; если значение параметра управления мощностью в замкнутом контуре для SRS является относительным значением конфигурирования, то значение параметра управления мощностью в замкнутом контуре для SRS должно быть рассчитано сначала на основании значения относительной регулировки, и затем значение параметра управления мощностью в замкнутом контуре для SRS, полученное посредством вычисления, используют для вычисления мощности передачи для SRS.
Возможно, если значение параметра управления мощностью в замкнутом контуре для SRS является относительным значением регулировки, способ дополнительно включает в себя: определение значения параметра управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре.
В частности, определение значения параметра управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре, включает в себя: вычисление значения параметра управления мощностью в замкнутом контуре для SRS по формуле, где является информацией управления мощностью в замкнутом контуре для SRS в предшествующем подкадре; является значением относительной регулировки; и если SRS сконфигурирован периодически, является периодичностью подкадра SRS или, если SRS настроен апериодически, i- является номером подкадра предшествующего подкадра.
Дополнительно, определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: получение мощности передачи для SRS на основании, по меньшей мере, одной из максимальной мощности передачи устройства пользователя UE, значение регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи, оцененное значение потерь в тракте нисходящей линии связи и параметр управления мощностью в замкнутом контуре для SRS.
В частности, определение мощности передачи для SRS на основании параметра управления мощностью для SRS включает в себя: вычисление мощности передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре на коммутируемой на несущей С1; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания передачи для SRS; является значением параметра целевой мощности для SRS; является коэффициентом компенсации потерь в тракте передачи; является оценочным значением потерь в тракте нисходящей линии связи; и является значением параметра управления мощностью в замкнутом контуре для SRS. может быть зафиксировано на 1, и для, как правило, j равно 2. Когда j равно 0, является мощностью передачи полупостоянного планирования; когда] равно 1, представляет собой мощность передачи динамического планирования; и когда j равно 2, представляет собой мощность передачи данных произвольного доступа.
Дополнительно, до получения параметра управления мощностью для SRS способ дополнительно включает в себя: получение информации ТРС управления мощностью передачи, где информация ТРС является информацией, скремблированной или маскируемой с помощью первого RNTI.
Дополнительно, получение параметра управления мощностью для SRS включает в себя: синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС на основании первого RNTI.
В этом варианте осуществления значение параметра управления мощностью в замкнутом контуре для SRS может быть включено в состав информации ТРС, скремблированной первым RNTI, и первый RNTI указан в UE заранее. UE может дескремблировать информацию ТРС на основании первого RNTI, чтобы получить значение параметра управления мощностью в замкнутом контуре для SRS.
Дополнительно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, до получения параметра управления мощностью для SRS способ дополнительно включает в себя: получение информации управления нисходящей линии связи (информация управления нисходящей линии связи, DCI для краткости).
Дополнительно, получение параметра управления мощностью для SRS включает в себя: получение значения параметра управления мощностью в замкнутом контуре для SRS на основании QCI.
В этом варианте осуществления различные форматы DCI могут быть определены конкретно следующим образом:
Первый DCI формат: если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, индекс первой несущей, где вторая несущая является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
Соответственно, в этом варианте осуществления получение значения параметра управления мощностью в замкнутом контуре для SRS на основании DCI включает в себя: получение значения параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу первой несущей.
В этом варианте осуществления в случае уведомление перекрестной несущей DCI, полученного на коммутируемой из несущей, должно включать в себя, по меньшей мере, индекс коммутируемой в несущую, так что UE получает на основании индекса первой несущей, значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу несущей.
Второй DCI формат: если DCI является информацией управления, полученной на первой несущей, получение значения параметра управления мощностью в замкнутом контуре для SRS на основании DCI включает в себя: получение значения параметра управления мощностью в замкнутом контуре для SRS из DCI.
В этом варианте осуществления, когда DCI является информацией управления, полученной на коммутируемой на несущую, значение параметра управления мощностью в замкнутом контуре для SRS в новом формате DCI используют непосредственно для управления мощностью передачи SRS.
Фиг. 4 иллюстрирует блок-схему последовательности операций способа управления мощностью согласно варианту 3 осуществления настоящего изобретения. Способ относится к способу управления мощностью при инициировании переключения несущей на основании SRS, если символы двух подкадров перекрываются и мощность передачи в перекрывающемся участке превышает максимальную мощность передачи UE. Как показано на фиг. 4, способ включает в себя следующие этапы.
Этап 301: Получают мощность передачи в участке перекрытия символа первого подкадра и второго подкадра, где первый подкадр является подкадром, в котором зондирующий опорный сигнал SRS передают на первой несущей, и второй подкадр является подкадром, в котором SRS или физический канал передают на второй несущей.
В этом варианте осуществления, если символ подкадра, в котором передают зондирующий опорный сигнал SRS на первой несущей, перекрывает символ подкадра, в котором передают SRS или физический канал на второй несущей, необходимо вычислит мощность передачи в символе перекрывающегося участка. Например, когда для UE сконфигурированы несколько групп продвижения синхронизации (Timing Advance Group, TAG для краткости), когда символ в подкадре i для SRS передачи UE на одной предполагаемой обслуживающей несущей/соте в одной TAG перекрывает символ в подкадре i или подкадре i+1, используемый для передачи PUCCH на другой обслуживающей несущей/соте, вычисляют мощность передачи в участке перекрытия символа.
Этап 302: Если мощность передачи превышает максимальную мощность передачи UE, управляют мощностью передачи подлежащего передаче сигнала, где подлежащий передаче сигнала включает в себя SRS и/или физический канал.
В этом варианте осуществления, если мощность передачи превышает максимальную мощность передачи UE, управляют мощностью передачи подлежащего передаче сигнала. Например, если мощность передачи мощность передачи превышает максимальную мощность передачи UE, отбрасывают часть подлежащего передаче сигнала соответственно или выполняют масштабирование мощности подлежащего передаче сигнала.
В способе управления мощностью, предусмотренном в этом варианте осуществления, UE получает мощность передачи в участке перекрытия символа первого подкадра, в котором передают зондирующий опорный сигнал SRS на первой несущей, и втором подкадре, в котором передают SRS или физический канал на второй несущей, и если мощность передачи превышает максимальную мощности передачи UE, управление мощностью передачи подлежащего передаче сигнала, так что передают подлежащий передаче сигнал с соответствующей мощностью, обеспечивая эффективность передачи подлежащего передаче сигнала.
Возможно, до управления мощностью передачи подлежащего передаче сигнала, способ дополнительно включает в себя: определение, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
Дополнительно, управление мощностью передачи подлежащего передаче сигнала включает в себя: управление мощностью передачи подлежащего передаче сигнала на основании периодической конфигурации SRS; или управления мощностью передачи подлежащего передаче сигнала на основании апериодической конфигурации SRS.
В этом варианте осуществления может быть выбрано отбрасывание части подлежащего передаче сигнала или масштабирование мощности части подлежащего передаче сигнала на основании периодической характеристики SRS.
Возможно, если SRS сконфигурирован периодически, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SR5 или масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, физический канал является физическим общим каналом восходящей линии связи PUSCH, и PUSCH не включает в себя информацию управления восходящей линии связи UCI, то управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание PUSCH или выполнение масштабирование мощности для PUSCH.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический общий канал восходящей линии связи PUSCH и PUSCH включает в себя информацию управления восходящей линии связи UCI, то управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, и физический канал является физическим каналом управления восходящей линии связи PUCCH, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или масштабирование мощности для SRS; или отбрасывание PUCCH или масштабирования мощности для PUCCH.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический канал управления восходящей линии связи PUCCH и PUCCH включает в себя гибридный автоматический запрос повторения HARQ, управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS-Или выполнение масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, физический канал является PUCCH, и PUCCH включает в себя только информацию состояния канала (информация состояния канала, CSI для краткости), управление мощностью передачи подлежащего передаче сигнала включает в себя:
отбрасывание SRS или масштабирование мощности для SRS; или отбрасывание PUCCH или масштабирования мощности для PUCCH.
В этом варианте осуществления, когда SRS сконфигурирован апериодически, физический канал является PUCCH, PUCCH включает только CSI, и PUCCH не включает в себя гибридный автоматический запрос повторения (Hybrid Automatic Repeat Request, HARQ для краткости), управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или масштабирование мощности для SRS; или отбрасывание PUCCH или масштабирование мощности для PUCCH.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой канал произвольного доступа PRACH, и PRACH является параллельным, то управление мощностью передачи подлежащего передаче сигнала включает в себя: отбрасывание SRS или масштабирование мощности для SRS.
Далее приведено подробное описание способа «управления мощностью передачи подлежащего передаче сигнала на основании периодической характеристики SRS» на основании различных конфигураций UE.
Случай 1:
Когда для UE сконфигурировано множество TAGs, когда символ в подкадре i, используют для SRS передачи UE на одной предполагаемой обслуживающей несущей/соте в одной TAG, перекрывает символ в подкадре i или подкадре i+1, используемом для PUCCH/PUSCH на другой обслуживающей несущей/соте, если мощность передачи в участке перекрытия символов превышает максимальную мощность передачи UE, применяют следующие случаи:
(1) Когда SRS сконфигурирован периодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(2) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует только PUSCH, и PUSCH не включает в себя информацию управления восходящей линии связи (информация управления восходящей линии связи, UCI для краткости), UE отбрасывает передачу PUSCH или выполняет масштабирование мощности для передачи PUSCH; или UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(3) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует только PUSCH, и PUSCH включает в себя UCI, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(4) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE и присутствует PUCCH, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS; или UE отбрасывает передачу PUSCH или выполняет масштабирование мощности для передачи PUSCH.
(5) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует PUCCH, и PUCCH включает в себя гибридный автоматический запрос повторения (Hybrid Automatic Repeat Request, HARQ для краткости), UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(6) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует PUCCH, и PUCCH включает в себя только CSI, UE отбрасывает передачу SRS или PUCCH; или UE выполняет масштабирование мощности для передачи SRS или выполняет масштабирование мощности для PUCCH.
Случай 2:
Когда для UE сконфигурировано множество TAGs и более двух обслуживающих несущих/сот, когда символ в подкадре i используют для передачи SRS на одной обслуживающей несущей/соте, перекрывает символ в подкадре i, использованный для передачи SRS на другой несущую/соте и/или перекрывает символ в подкадре i или подкадре i+1, используемом для передачи PUCCH/PUSCH на другой обслуживающей несущей/соте, если мощность передачи для участка перекрытия символов превышает максимальную мощность передачи UE, применяются следующие случаи:
(1) Когда SRS сконфигурирован периодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(2) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует только PUSCH, и PUSCH не включает в себя информацию управления восходящей линии связи UCI, UE отбрасывает передачу PUSCH или выполняет масштабирование мощности для передачи PUSCH; или UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(3) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует только PUSCH, и PUSCH включает в себя информацию управления восходящей линии связи UCI (информация управления восходящей линии связи), UE отбрасывает SRS передачу или выполняет масштабирование мощности для передачи SRS.
(4) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE и присутствует PUCCH, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS; или UE отбрасывает передачу PUSCH или выполняет масштабирование мощности для передачи PUSCH.
(5) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует PUCCH, и PUCCH включает в себя HARQ, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(6) Когда SRS сконфигурирован апериодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, присутствует PUCCH, и PUCCH включает в себя только CSI, UE отбрасывает передачу SRS или PUCCH; или UE выполняет масштабирование мощности для передачи SRS или выполняет масштабирование мощности для PUCCH.
Случай 3:
Когда для UE сконфигурировано множество TAGs, UE передает физический канал произвольного доступа (физический канал произвольного доступа, PRACH для краткости) на вторичной обслуживающей несущей/соте, и PRACH является параллельным в символе в подкадре, используемом для SRS на другой обслуживающей несущей/соте, если мощность передачи в участке перекрытия символов превышает максимальную мощность передачи UE, применяют следующие случаи:
(1) Когда SRS сконфигурирован периодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
(2) Когда SRS сконфигурирован периодически, если мощность передачи в любом перекрывающемся символе превышает максимальную мощность передачи UE, и PRACH является параллельным, UE отбрасывает передачу SRS или выполняет масштабирование мощности для передачи SRS.
Фиг. 5 иллюстрирует блок-схему последовательности операций способа управления мощностью согласно варианту 4 осуществления настоящего изобретения. Способ выполняют базовой станцией. Как показано на фиг. 5, способ включает в себя следующие этапы.
Этап 401: Получают параметр управления мощностью для зондирующего SRS опорного сигнала на первый несущий, где параметр управления мощности для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS.
В этом варианте осуществления параметр управления мощностью для SRS конкретно выполнен с возможностью обеспечивать вычисление мощности передачи для SRS на коммутируемой несущей.
Этап 402: Отправляют параметр управления мощностью для SRS в устройство пользователя UE, чтобы UE определяло мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
В этом варианте осуществления базовая станция может отправлять параметр управления мощностью для SRS различными способами. Например, базовая станция передает предварительно сконфигурированный параметр управления мощностью для SRS в UE с использованием на коммутируемой несущей для передачи SRS. В качестве альтернативы, базовая станция отправляет значение параметра целевой мощности для SRS и коэффициент компенсации потерь в тракте передачи в UE посредством использования сигнализации физического уровня или сигнализации управления, и затем указывает значение параметра управления мощностью в замкнутом контуре для SRS в UE, используя информацию управления мощностью передачи (управление мощностью передачи, ТРС). В качестве альтернативы, базовая станция отправляет различные значения в параметре управления мощностью для SRS в UE другими способами. UE может вычислять мощность передачи для SRS на первой несущей на основе параметра управления мощностью для SRS, так что SRS отправляют на первой несущей с соответствующей мощностью передачи.
В способе управления мощностью, предусмотренном в этом варианте осуществления, базовая станция получает параметр управления мощностью для SRS на первой несущей, где параметр управления мощностью включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS, отправляет параметр управления мощностью для SRS в устройство пользователя UE, так что UE определяет мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS. Таким образом, UE может вычислять мощность передачи для SRS на коммутируемой несущей на основании вновь сконфигурированного параметра управления мощностью для SRS, так что SRS передают на коммутируемой несущей с оптимальной мощностью передачи, обеспечивая корректный прием SRS.
Возможно, первая несущая является несущей, на которой не отправляют PUSCH.
Возможно, отправка параметра управления мощностью для SRS в устройство пользователя UE включает в себя: отправку параметра управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
Сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
Сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
Возможно, значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании первоначального принятого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основе начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
Дополнительно, отправка параметра управления мощностью для SRS в UE с использованием сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей включает в себя: скремблирование параметра управления мощностью для SRS на основании первого временного идентификатора радиосети RNTI для генерирования сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей; и отправку сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей в UE.
Возможно, SRS конфигурируют периодически или конфигурируют апериодически.
Дополнительно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулировки.
Дополнительно, способ дополнительно включает в себя: отправку информации ТРС в UE, так что UE выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС, где информация ТРС является информацией, скремблированной первым временным идентификатором радиосети RNTI.
Дополнительно, если параметр управления мощностью для SRS включает в себя параметр управления мощностью в замкнутом контуре для SRS, способ дополнительно включает в себя: отправку информации управления нисходящей линии связи DCI в UE, так что UE получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
Возможно, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, первый индекс несущей, и DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей первому индексу несущей.
Вторая несущая представляет собой коммутируемую из несущей или любую несущую, отличную от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
Возможно, если DCI представляет собой информацию управления, полученную на первой несущей, DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Способ управления мощностью, предусмотренный в этом варианте осуществления, реализуют базовой станцией и соответствует способу управления мощностью на стороне UE. Подробные описания принципа реализации и конкретных технических характеристик способа может быть сделано со ссылкой на способ управления мощностью на стороне UE в вариантах осуществления на фиг. 2 - фиг. 4. Детали не описаны здесь снова.
Фиг. 6 иллюстрирует схему устройства управления мощностью согласно варианту 5 осуществления настоящего изобретения. Как показано на фиг. 6, устройство включает в себя модуль 11 получения и модуль 12 определения. Модуль 11 получения выполнен с возможностью получать параметр управления мощностью для зондирующего опорного сигнала SRS, где параметр управления мощностью для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS. Модуль 12 определения выполнен с возможностью определять мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
Устройство в этом варианте осуществления может быть выполнено с возможностью реализовывать техническое решение варианта осуществления способа, показанного на фиг. 2. Их принципы реализации и технические эффекты аналогичны, и более подробные сведения в настоящем документе опущены.
Возможно, первая несущая является несущей, на которой не посылают физический канал восходящей линии связи PUSCH.
Возможно, модуль 11 получения конкретно выполнен с возможностью получать сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, передаваемой базовой станцией.
Возможно, сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
Возможно, модуль 11 получения дополнительно конкретно выполнен с возможностью получать параметр управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
Возможно, сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
Возможно, значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании первоначального принятого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
Возможно, что модуль 11 получения получает параметр управления мощностью из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, что включает в себя, модуль 11 получения выполняет синтаксический разбор параметра управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей на основании первого временного идентификатора радиосети RNTI.
Возможно, модуль 12 определения конкретно выполнен с возможностью получать мощность передачи для SRS на основании, по меньшей мере, одного из максимальной мощности передачи устройства пользователя UE, значения регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значения параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи и оцененного значения потерь в тракте нисходящей линии связи.
Возможно, модуль 12 определения конкретно выполнен с возможностью вычислять мощность передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания для SRS; является целевым значением параметра мощности для SRS, где j равно 0,1 или 2; является коэффициентом компенсации потерь в тракте передачи; и является оцененным значением потерь в тракте нисходящей линии связи.
Возможно, модуль 12 определения дополнительно выполнен с возможностью определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
Возможно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением корректировки.
Возможно, модуль 11 получения дополнительно выполнен с возможностью получать информацию управления мощностью передачи ТРС, где информация ТРС является информацией, скремблированной первым временным идентификатором радиосети RNTI.
Возможно, модуль 11 получения получает параметр управления мощностью для SRS, что включает в себя, модуль 11 получения выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС на основании первого RNTI.
Возможно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, модуль 11 получения дополнительно выполнен с возможностью получать информацию управления нисходящей линии связи DCI.
Возможно, модуль 11 получения получает параметр управления мощностью для SRS, что включает в себя, модуль 11 получения получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
Возможно, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, индекс первой несущей.
Возможно, вторая несущая является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
Возможно, модуль 11 получения получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, что включает в себя, модуль 11 получения получает значение параметра управления мощностью в замкнутом контуре для SRS на несущей соответствующей индексу первой несущей.
Возможно, если DCI представляет собой информацию управления, полученную на первой несущей, что модуль получения 11 получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, что включает в себя, модуль 11 получения получает значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Возможно, если значение параметра управления мощностью в замкнутом контуре для SRS является относительным значением регулировки, модуль 12 определения дополнительно выполнен с возможностью определять значение параметра управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одного из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре.
Возможно, модуль 12 определения определяет параметр управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре, что включает в себя, модуль 12 определения вычисляет значение параметра управления мощностью в замкнутом контуре для SRS по формуле, где является информацией управления мощностью в замкнутом контуре для SRS в предшествующем подкадре; является значением относительной регулировки; и, если SRS сконфигурирован периодически, является периодичностью субкадра SRS или, если SRS сконфигурирован апериодически, i- является номером подкадра предшествующего подкадра.
Возможно, модуль 12 определения определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя то, модуль 12 определения получает мощность передачи для SRS на основании, по меньшей мере, одной из максимальной мощности передачи устройства пользователя UE, значения регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значения параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи, оценочного значения потерь в тракте нисходящей линии связи и параметра управления мощностью в замкнутом контуре для SRS.
Возможно модуль 12 определения определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя, модуль 12 определения вычисляет мощность передачи для SRS согласно формуле, где является максимальной мощностью передачи устройства пользователя UE в i-м подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1, является шириной полосы пропускания для SRS; является значением значения целевой мощности для SRS; является коэффициентом компенсации потерь в тракте передачи; является оценочным значением потерь в тракте нисходящей линии связи; и является значением параметра управления мощностью в замкнутом контуре для SRS.
Устройство в этом варианте осуществления может быть выполнено с возможностью реализовать техническое решение варианта осуществления способа, показанного на фиг. 2 или фиг. 3. Принципы их реализации и технические эффекты аналогичны, и более подробная информация опущена.
Фиг. 7 иллюстрирует схему устройства для управления мощностью согласно варианту 6 осуществления настоящего изобретения. Как показано на фиг. 7, устройство включает в себя модуль 21 получения и модуль 22 обработки. Модуль 21 получения выполнен с возможностью получать мощность передачи в участке перекрытия символа первого подкадра и второго подкадра, где первый подкадр является подкадром, в котором передают зондирующий опорный сигнал SRS на первой несущей, и второй подкадр является подкадром, в котором передают SRS или физический канал на второй несущей. Модуль 22 обработки выполнен с возможностью, если мощность передачи превышает максимальную мощность передачи устройства пользователя UE, управлять мощностью передачи подлежащего передаче сигнала, где подлежащий передаче сигнал включает в себя SRS и/или физический канал.
Возможно, модуль 22 обработки дополнительно выполнен с возможностью определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
Возможно, модуль 22 обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, модуль 22 обработки управляет мощностью передачи подлежащего передаче сигнала на основании периодической конфигурации SRS; или модуль 22 обработки управляет мощностью передачи подлежащего передаче сигнала на основании апериодической конфигурации SRS.
Возможно, если SRS сконфигурирован периодически, модуль 22 обработки управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, модуль 22 обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, физический канал является физическим общим каналом восходящей линии связи PUSCH, и PUSCH не содержит информацию управления восходящей линии связи UCI, модуль 22 управления управляет мощностью передачи для передаваемого сигнала, включает в себя то, что модуль 22 обработки отбрасывает PUSCH или выполняет масштабирование мощности для PUSCH.
Возможно, если SRS сконфигурирован апериодически, физический канал является физическим общим каналом восходящей линии связи PUSCH, и PUSCH включает в себя информацию управления восходящей линии связи UCI, модуль 22 управления управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, модуль обработки 22 отбрасывает SRS или выполняет масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, и физический канал представляет собой физический канал управления восходящей линии связи PUCCH, модуль 22 управления управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, модуль 22 обработки отбрасывает SRS или выполняет масштабирование мощности для SRS; или модуль 22 обработки отбрасывает PUCCH или выполняет масштабирование мощности для PUCCH.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический канал управления восходящей линии связи PUCCH, и PUCCH включает в себя гибридный автоматический запрос повтора HARQ, модуль 22 управления управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, модуль 22 обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический канал управления восходящей линии связи PUCCH, и PUCCH включает только информацию состояния канала CSI, модуль 22 обработки управляет мощностью передачи подлежащего передаче сигнала, модуль обработки 22 отбрасывает SRS или выполняет масштабирование мощности для SRS; или модуль 22 обработки отбрасывает PUCCH или выполняет масштабирование мощности для PUCCH.
Возможно, если SRS сконфигурирован апериодически, физический канал является каналом произвольного доступа PRACH, и PRACH является параллельным, модуль 22 управления управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, модуль 22 обработки отбрасывает SRS или выполняет масштабирование мощности для SRS.
Устройство в этом варианте осуществления может быть выполнено с возможностью реализовывать техническое решение варианта осуществления способа, показанного на фиг. 4. Их принципы реализации и технические эффекты аналогичны, и в настоящем документе более подробная информация опущена.
Фиг. 8 иллюстрирует схему устройства для управления мощностью согласно варианту 7 осуществления настоящего изобретения. Как показано на фиг. 8, устройство включает в себя модуль 31 получения и модуль 32 отправки. Модуль 31 получения выполнен с возможностью получать параметр управления мощностью для зондирующего опорного сигнала SRS на первой несущей, где параметр управления мощностью для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS. Модуль 32 отправки выполнен с возможностью отправлять параметр управления мощностью для SRS в устройство пользователя UE, так что UE определяет мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
Возможно, первая несущая является несущей, на которой не посылают физический общий канал восходящей линии связи PUSCH.
Возможно, модуль специально отправки конкретно выполнен с возможностью отправлять параметр управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
Возможно, сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
Возможно, сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
Возможно, значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании первоначального принятого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
Возможно, модуль отрывки отправляет параметр управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, что включает в себя, модуль отправки скремблирует параметр управления мощностью для SRS на основании первого временного идентификатора радиосети RNTI, чтобы генерировать сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей; и посылает сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей в UE.
Возможно, SRS конфигурируют периодически или конфигурируют апериодически.
Возможно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением корректировки.
Возможно, модуль отправки дополнительно выполнен с возможностью отправлять информации управления мощностью передачи ТРС в UE, так что UE выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС, где информация ТРС является информацией, скремблированной с помощью первого временного идентификатора радиосети RNTI.
Возможно, если параметр управления мощностью для SRS включает в себя параметр управления мощностью в замкнутом контуре для SRS, модуль отправки дополнительно выполнен с возможностью отправлять информацию управления нисходящей линии связи DCI в UE, так что UE получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
Возможно, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, индекс первой несущей, и DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей к индексу первой несущей.
Возможно, вторая несущая является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
Возможно, если DCI представляет собой информацию управления, полученную на первой несущей, DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Устройство в этом варианте осуществления может быть выполнено с возможностью выполнять техническое решение варианта осуществления способа, показанного на фиг. 5. Принципы их реализации и технические эффекты аналогичны, и в настоящем документе более подробно не приводится.
Фиг. 9 иллюстрирует схему UE согласно восьмому варианту осуществления настоящего изобретения. UE может включать в себя процессор 401 и память 402. Устройство может дополнительно включать в себя интерфейс 403 передачи и интерфейс 404 приема. Интерфейс 403 передачи и интерфейс 404 приема могут быть подключены к процессору 401. Интерфейс 403 передачи используют для передачи данных или информации, и интерфейс 403 передачи может быть устройством для радиопередачи. Интерфейс 404 приема используют для приема данных или информации, и интерфейс 404 приема может быть устройством для радиоприема. Память 402 хранит исполняемую инструкцию. Когда устройство работает, процессор 401 взаимодействует с памятью 402, и процессор 401 вызывает исполняемую инструкцию в памяти 402 для выполнения следующих операций:
получение параметра управления мощностью для зондирующего опорного сигнала SRS, где параметр управления мощностью для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS; и
определение мощности передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
Возможно, первая несущая является несущей, на которую не посылают физический канал восходящей линии связи PUSCH.
Возможно, процессор 401 получает параметр управления мощностью для зондирующего опорного сигнала SRS, что включает в себя, процессор 401 принимает сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей, отправленной базовой станцией.
Возможно, сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
Возможно, процессор 401 получает параметр управления мощностью для зондирующего опорного сигнала SRS, что включает в себя, что процессор 401 получает параметр управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
Возможно, сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
Возможно, значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании первоначального принятого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основе начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
Возможно, процессор 401 получает параметр управления мощностью из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, что включает в себя, процессор 401 выполняет синтаксический разбор параметра управления мощностью для SRS из сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей на основании первого временного идентификатора радиосети RNTI.
Возможно, процессор 401 определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя, процессор 401 получает мощность передачи для SRS на основании, по меньшей мере, одной из максимальной мощности передачи устройства пользователя UE, значение регулировки мощности передачи для SRS, ширину полосы пропускания передачи для SRS, значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и оцениваемое значение потерь в тракте нисходящей линии связи.
Возможно, процессор 401 определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя, процессор 401 вычисляет мощность передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-ом подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания передачи для SRS; является целевым значением параметра мощности для SRS, где j равно 0,1 или 2; является коэффициентом компенсации потерь в тракте передачи; и является оцененным значением потерь в тракте нисходящей линии связи.
Возможно, процессор 401 дополнительно выполнен с возможностью определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
Возможно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулировки.
Возможно, процессор 401 дополнительно выполнен с возможностью получать информацию управления мощностью передачи ТРС, где информация ТРС является информацией, скремблированной с первым временным идентификатором RNTI радиосети.
Возможно, процессор 401 дополнительно выполнен с возможностью выполнять синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС на основании первого RNTI.
Возможно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, процессор 401 дополнительно выполнен с возможностью получать информацию управления нисходящей линии связи DCI.
Возможно, процессор 401 получает параметр управления мощностью для SRS, что включает в себя, процессор 401 получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
Возможно, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, первый индекс несущей.
Возможно, вторая несущая является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
Возможно, процессор 401 получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, что включает в себя то, что процессор 401 получает значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу первой несущей.
Возможно, если DCI является информацией управления, полученной на первой несущей, то процессор 401 получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, что включает в себя, процессор 401 получает значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Возможно, если значение параметра управления мощностью в замкнутом контуре для SRS является относительным значением регулировки, процессор 401 дополнительно выполнен с возможностью определять значение параметра управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одного из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре.
Возможно, процессор 401 определяет параметр управления мощностью в замкнутом контуре для SRS на основании, по меньшей мере, одной из информации управления мощностью в замкнутом контуре или относительного значения регулировки для SRS в предшествующем подкадре, что включает в себя то, что процессор 401 вычисляет значение параметра управления мощностью в замкнутом контуре для SRS в соответствии с формулой, где является информацией управления мощностью в замкнутом контуре для SRS в предшествующем подкадре; является значением относительной регулировки; и, если SRS сконфигурирован периодически, то является периодичностью субкадра SRS или, если SRS сконфигурирован апериодически, то i-является номером подкадра предшествующего подкадра.
Возможно, процессор 401 определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, что включает в себя то, что процессор 401 получает мощность передачи для SRS на основании, по меньшей мере, одной из максимальной мощности передачи устройства пользователя UE, значение регулировки мощности передачи для SRS, ширины полосы пропускания передачи для SRS, значение параметра целевой мощности для SRS, коэффициента компенсации потерь в тракте передачи, оцененное значение потери в тракте нисходящей линии связи и параметр управления мощностью в замкнутом контуре для SRS.
Возможно, процессор 401 определяет мощность передачи для SRS на основании параметра управления мощностью для SRS, включает в себя, что процессор 401 вычисляет мощность передачи для SRS в соответствии с формулой, где является максимальной мощностью передачи устройства пользователя UE в i-ой подкадре; является значением регулировки мощности передачи для SRS, где m равно 0 или 1; является шириной полосы пропускания передачи для SRS; является значение параметра целевой мощности для SRS; является коэффициентом компенсации потерь в тракте передачи; является оценочным значением потерь в тракте нисходящей линии связи; и является значением параметра управления мощностью в замкнутом контуре для SRS.
UE в этом варианте осуществления может быть выполнено с возможностью выполнять техническое решение варианта осуществления способа, показанного на фиг. 2 или фиг. 3. Принципы их реализации и технические эффекты аналогичны, и в настоящем документе более подробную информацию не повторяют.
Вариант осуществления настоящего изобретения дополнительно предоставляет UE, где структура UE является такой же, как структура UE, показанная на фиг. 9. При инициировании UE, процессор взаимодействуете памятью, и процессор вызывает исполняемую инструкцию в памяти для выполнения следующих операций:
получение мощности передачи в участке перекрытия символа первого подкадра и второго подкадра, где первый подкадр является подкадром, в котором передают зондирующий опорный сигнал SRS на первой несущей, и второй подкадр является подкадром, в котором передают SRS или физический канал на второй несущей; и
если мощность передачи превышает максимальную мощность передачи UE, управление мощностью передачи подлежащего передаче сигнала, где подлежащий передаче сигнала включает в себя SRS и/или физический канал.
Возможно, процессор дополнительно выполнен с возможностью определять, сконфигурирован ли SRS периодически или сконфигурирован апериодически.
Возможно, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, процессор управляет мощностью передачи подлежащего передаче сигнала на основании периодической конфигурации SRS; или процессор управляет мощностью передачи подлежащего передаче сигнала на основании апериодической конфигурации SRS.
Возможно, если SRS сконфигурирован периодически, то процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя отбрасывание SRS или масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, физический канал является физическим общим каналом восходящей линии связи PUSCH, и PUSCH не включает в себя информацию управления восходящей линии связи UCI, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя то, что процессор отбрасывает PUSCH или выполняет масштабирование мощности для PUSCH.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический общий канал восходящей линии связи PUSCH, и PUSCH включает в себя информацию управления восходящей линии связи UCI, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, что процессор отбрасывает SRS или выполняет масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, и физический канал представляет собой физический канал управления восходящей линии связи PUCCH, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя то, что процессор отбрасывает SRS или выполняет масштабирование мощности для SRS; или что процессор отбрасывает PUCCH или выполняет масштабирование мощности для PUCCH.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический канал управления восходящей линии связи PUCCH, и PUCCH включает в себя гибридный автоматический запрос повтора HARQ, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя то, что процессор отбрасывает SRS или выполняет масштабирование мощности для SRS.
Возможно, если SRS сконфигурирован апериодически, физический канал представляет собой физический канал управления восходящей линии связи PUCCH, и PUCCH включает в себя только информацию состояния канала CSI, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя то, что процессор отбрасывает SRS или выполняет масштабирование мощности для SRS; или что процессор отбрасывает PUCCH или выполняет масштабирование мощности для PUCCH.
Возможно, если SRS сконфигурирован апериодически, физический канал является каналом произвольного доступа PRACH, и PRACH является параллельным, процессор управляет мощностью передачи подлежащего передаче сигнала, что включает в себя, процессор отбрасывает SRS или выполняет мощность масштабирование для SRS.
UE в этом варианте осуществления может быть выполнено с возможностью выполнять техническое решение варианта осуществления способа, показанного на фиг. 4. Их принципы реализации и технические эффекты алогичны, и здесь не приводится более подробных сведений.
Фиг. 10 является схемой базовой станции согласно варианту 9 осуществления настоящего изобретения. Как показано на фиг. 10, базовая станция включает в себя процессор 501 и передатчик 502. Процессор 501 выполнен с возможностью получать параметр управления мощностью для зондирующего опорного сигнала SRS на первый несущий, где параметр управления мощности для SRS включает в себя, по меньшей мере, одно из значение параметра целевой мощности для SRS, коэффициент компенсации потерь в тракте передачи и значение параметра управления мощностью в замкнутом контуре для SRS. Передатчик 502 выполнен с возможностью посылать параметр управления мощностью для SRS в устройство пользователя UE, так что UE определяет мощность передачи для SRS на первой несущей на основании параметра управления мощностью для SRS.
Возможно, первая несущая является несущей, на которую не посылают физический общий канал восходящей линии связи PUSCH.
Возможно, передатчик 502 отправляет параметр управления мощностью для SRS в устройство пользователя UE, что включает в себя то, что передатчик 502 отправляет параметр управления мощностью для SRS в UE с помощью сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей.
Возможно, сигнализация управления мощностью включает в себя сигнализацию управления мощностью в разомкнутом контуре и/или сигнализацию управления мощностью в замкнутом контуре.
Возможно, сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей включает в себя сигнализацию управления радиоресурсами RRC или сигнализацию физического уровня.
Возможно, значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основании первоначального принятого значения целевой мощности преамбулы; или значение параметра целевой мощности для SRS представляет собой значение параметра, полученное на основе начального принимаемого значения целевой мощности преамбулы и значения регулировки мощности.
Возможно, передатчик 502 отправляет параметр управления мощностью для SRS в UE с использованием сигнализации управления мощностью или сигнализации управления мощностью перекрестной несущей, что включает в себя то, что передатчик 502 скремблирует параметр управления мощностью для SRS на основании RNTI для генерации сигнализация управления мощностью или сигнализация управления мощностью перекрестной несущей; и отправляет сигнализацию управления мощностью или сигнализацию управления мощностью перекрестной несущей в UE.
Возможно, SRS конфигурируют периодически или конфигурируют апериодически.
Возможно, если параметр управления мощностью для SRS включает в себя значение параметра управления мощностью в замкнутом контуре для SRS, значение параметра управления мощностью в замкнутом контуре для SRS является абсолютным значением или относительным значением регулировки.
Возможно, передатчик 502 дополнительно выполнен с возможностью отправлять информацию управления мощностью передачи ТРС в UE, так что UE выполняет синтаксический разбор значения параметра управления мощностью в замкнутом контуре для SRS из информации ТРС, где информация ТРС является информацией, скремблированной с помощью первого временного идентификатора радиосети RNTI.
Возможно, если параметр управления мощностью для SRS включает в себя параметр управления мощностью в замкнутом контуре для SRS, передатчик 502 дополнительно выполнен с возможностью отправлять информацию управления нисходящей линии связи DCI в UE, так что UE получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI.
Возможно, если DCI является информацией управления, полученной на второй несущей, DCI включает в себя, по меньшей мере, индекс первой несущей, и DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS на несущей, соответствующей индексу первой несущей.
Возможно, вторая несущая является коммутируемой от несущей или любой несущей, отличной от коммутируемой на несущую, и первая несущая является коммутируемой на несущую.
Возможно, если DCI представляет собой информацию управления, полученную на первой несущей, DCI используют для указания UE получить значение параметра управления мощностью в замкнутом контуре для SRS из DCI.
Возможно, как показано на фиг. 10, базовая станция может дополнительно включать в себя память 503 и приемник 504. Память 503 выполнена с возможностью хранить инструкцию и данные, и приемник 504 выполнен с возможностью принимать данные или информацию.
Устройство в этом варианте осуществления может быть выполнено с возможностью выполнять техническое решение варианта осуществления способа, показанного на фиг. 5. Принципы их реализации и технические эффекты аналогичны, и здесь более подробно не приводится.
Специалисты в данной области техники могут понять, что все или некоторые этапы вариантов осуществления способа могут быть реализованы программой, инструктирующей соответствующее аппаратное обеспечение. Программа может храниться на машиночитаемом носителе данных. При выполнении программы, выполняют этапы вариантов осуществления способа. Вышеупомянутый носитель данных включает в себя: любой носитель, который может хранить программный код, такой как постоянное запоминающее устройство (постоянное запоминающее устройство, ROM для краткости), оперативное запоминающее устройство (оперативное запоминающее устройство, RAM для краткости), магнитный диск, или оптический диск.
В заключение, следует отметить, что приведенные выше варианты осуществления просто предназначены для описания технических решений настоящего изобретения, но не для ограничения настоящего изобретения. Хотя настоящее изобретение подробно описано со ссылкой на вышеприведенные варианты осуществления, специалисты в данной области техники должны понимать, что они могут все еще вносить изменения в технические решения, описанные в вышеприведенных вариантах осуществления, или сделать эквивалентную замену некоторым или всем техническим характеристикам, не отступая от объема технических решений вариантов осуществления настоящего изобретения.



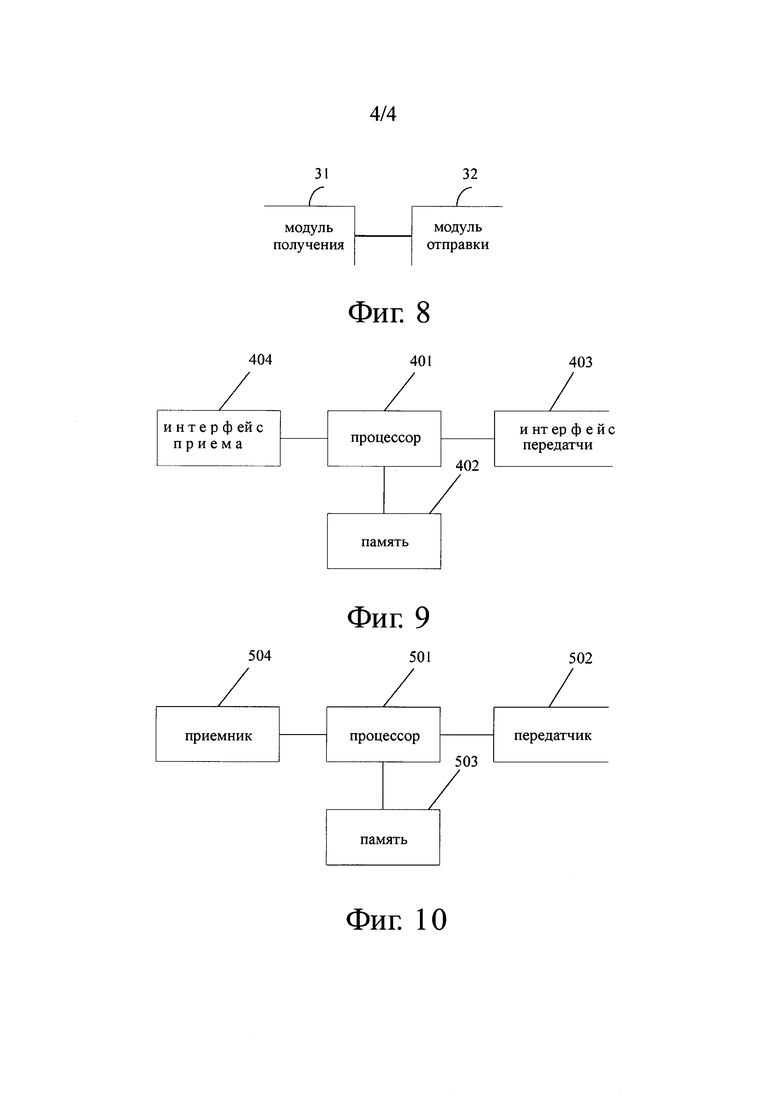
Изобретение относится к области связи. Варианты осуществления настоящего изобретения обеспечивают способ и устройство для управления мощностью. Способ включает в себя: получение параметра управления мощностью для зондирующего опорного сигнала (SRS), причем параметр управления мощностью для SRS включает в себя по меньшей мере одно из целевого значения параметра мощности для SRS, коэффициента компенсации потерь в тракте и значения параметра управления мощностью в замкнутом контуре для SRS; и определение мощности передачи для SRS на первой несущей на основании параметра управления мощностью для SRS. Таким образом, SRS передается на оптимальном уровне мощности передачи на коммутируемой несущей, обеспечивая корректный прием SRS. 4 н. и 3 з.п. ф-лы, 10 ил.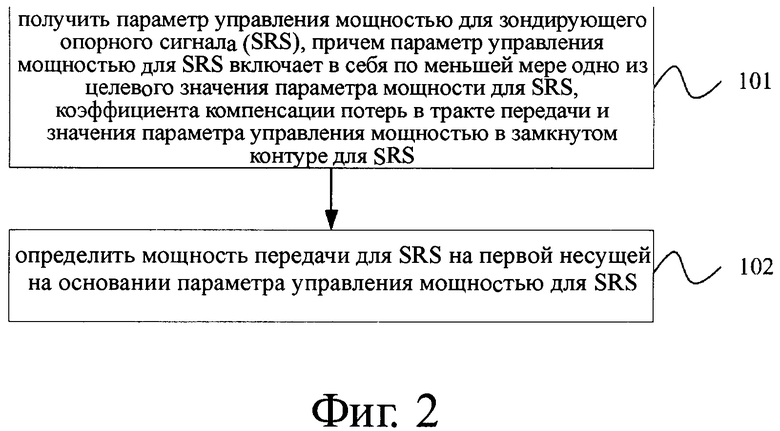
1. Способ управления мощностью, содержащий этапы, на которых:
получают сигнализацию управления радиоресурсами (RRC), причем сигнализация RRC содержит целевое значение параметра мощности для зондирующего опорного сигнала (SRS) и коэффициент компенсации потерь в тракте передачи для SRS; получают информацию управления нисходящей линии связи (DCI);
получают значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, причем значение параметра управления мощностью для SRS соответствует индексу первой несущей, причем индекс первой несущей используется для идентификации первой несущей, на которой не отправляется физический общий канал восходящей линии связи (PUSCH); и
определяют мощность передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи и значения параметра управления мощностью в замкнутом контуре;
при этом на этапе получения значения параметра управления мощностью в замкнутом контуре для SRS на основании DCI:
получают информацию управления мощностью передачи (TPC), причем информация TPC представляет собой информацию, скремблированную первым временным идентификатором радиосети (RNTI), причем первый RNTI представляет собой TPC-SRS-RNTI;
извлекают значение параметра управления мощностью в замкнутом контуре для SRS из информации TPC на основании первого RNTI.
2. Способ по п.1, в котором первая несущая является несущей, на которую выполняется переключение после переключения несущей на основании SRS.
3. Способ по п.1, дополнительно содержащий перед этапом определения мощности передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи и значения параметра управления мощностью в замкнутом контуре этап, на котором:
определяют конфигурацию SRS, причем конфигурация SRS является периодической конфигурацией SRS или апериодической конфигурацией SRS;
при этом на этапе определения мощности передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи и значения параметра управления мощностью в замкнутом контуре:
определяют мощность передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи, значения параметра управления мощностью в замкнутом контуре и конфигурации SRS.
4. Способ управления мощностью, содержащий этапы, на которых:
получают целевое значение параметра мощности для зондирующего опорного сигнала (SRS) и коэффициент компенсации потерь в тракте передачи для SRS;
отправляют в устройство пользователя (UE) сигнализацию управления радиоресурсами (RRC), содержащую целевое значение параметра мощности для SRS и коэффициент компенсации потерь в тракте передачи; и
отправляют информацию управления нисходящей линии связи (DCI) в UE, так что UE получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, причем значение параметра управления мощностью для SRS соответствует индексу первой несущей, причем индекс первой несущей используется для идентификации первой несущей, на которой не отправляется физический общий канал восходящей линии связи (PUSCH); и
UE определяет мощность передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи и значения параметра управления мощностью в замкнутом контуре;
при этом способ дополнительно содержит этап, на котором:
отправляют информацию управления мощностью передачи (TPC) в UE, причем информация TPC скремблирована первым временным идентификатором радиосети (RNTI), причем первый RNTI представляет собой TPC-SRS-RNTI, так что UE извлекает значение параметра управления мощностью в замкнутом контуре для SRS из информации TPC на основании первого RNTI.
5. Способ по п.4, в котором SRS конфигурирован периодически или апериодически.
6. Устройство для управления мощностью, содержащее:
модуль получения, выполненный с возможностью получать сигнализацию управления радиоресурсами (RRC), причем сигнализация RRC содержит целевое значение параметра мощности для зондирующего опорного сигнала (SRS) и коэффициент компенсации потерь в тракте передачи для SRS; получать информацию управления нисходящей линии связи (DCI) и получать значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, причем значение параметра управления мощностью в замкнутом контуре для SRS соответствует индексу первой несущей, причем индекс первой несущей используется для идентификации первой несущей, на которой не отправляется физический общий канал восходящей линии связи (PUSCH); и
модуль определения, выполненный с возможностью определять мощность передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи и значения параметра управления мощностью в замкнутом контуре;
при этом модуль получения дополнительно выполнен с возможностью получать информацию управления мощностью передачи (TPC), причем информация TPC представляет собой информацию, скремблированную первым временным идентификатором радиосети (RNTI), причем первый RNTI представляет собой TPC-SRS-RNTI; и извлекать значение параметра управления мощностью в замкнутом контуре для SRS из информации TPC на основании первого RNTI.
7. Устройство для управления мощностью, содержащее:
модуль получения, выполненный с возможностью получать целевое значение параметра мощности для зондирующего опорного сигнала (SRS) и коэффициент компенсации потерь в тракте передачи для SRS; и
модуль отправки, выполненный с возможностью отправлять в устройство пользователя (UE) сигнализацию управления радиоресурсами (RRC), причем сигнализация содержит целевое значение параметра мощности для SRS и коэффициент компенсации потерь в тракте передачи; отправлять информацию управления нисходящей линии связи (DCI) в UE, так что UE получает значение параметра управления мощностью в замкнутом контуре для SRS на основании DCI, причем значение параметра управления мощностью в замкнутом контуре для SRS соответствует индексу первой несущей, причем индекс первой несущей используется для идентификации первой несущей, на которой не отправляется физический общий канал восходящей линии связи (PUSCH), так что UE определяет мощность передачи для SRS на первой несущей на основании целевого значения параметра мощности, коэффициента компенсации потерь в тракте передачи и значения параметра управления мощностью в замкнутом контуре; и отправлять информацию управления мощностью передачи (TPC) в UE, причем информация TPC скремблирована первым временным идентификатором радиосети (RNTI), причем первый RNTI представляет собой TPC-SRS-RNTI, так что UE извлекает значение параметра управления мощностью в замкнутом контуре для SRS из информации TPC на основании первого RNTI.
| US 2015223213 A1, 06.08.2015 | |||
| RU 2012145853 A, 10.06.2014 | |||
| CN 103369654 A, 23.10.2013 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ НАПРАВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ПОЛОС, ВКЛЮЧАЮЩИЕ В СЕБЯ ИЗНАШИВАЕМЫЕ ЧАСТИ, ИМЕЮЩИЕ НЕСУЩИЙ ЭЛЕМЕНТ | 2019 |
|
RU2765732C1 |
| CN 104955144 A, 30.09.2015. | |||

