Область техники
Технические решения относятся к средствам обучения и общения с глухими и/или слепыми, к вычислительной технике и могут быть использованы для информационного обмена с людьми с нарушением зрения и/или слуха, с приборами, системами управления бытовой техники, смартфонами, компьютерами и другими устройствами.
Уровень техники
Для людей с ограниченными возможностями органов чувств возникают определенные информационно-коммуникационные сложности. Особенно сложно приходится людям, которые одновременно страдают глухотой и слепотой. Эта категория людей в целях информационного обмена с окружающим их миром вынуждена прибегать к устройствам, позволяющим получать и отправлять сообщения посредством тактильных механизмов при задействовании органов осязания на их ладонях. Информационный обмен в таких ситуациях может быть основан на использовании азбуки Лорма, согласно которой ладонь подразделена на зоны, каждая из зон соответствует определенной букве, буквам соответствует тактильные касания в этих зонах, а также иные тактильные манипуляции. Для сообщения слепому и глухому обращающийся к нему человек касается указанных точек, набирая как на клавиатуре свое сообщение. В этих точках могут быть расположены датчики, используемые для ввода/вывода информации.
Кроме того, существуют клавиатуры и дисплеи Брайля, позволяющие вводить и выводить информацию на персональный компьютер, но они дороги, громоздки и не мобильны.
Из опубликованной заявки на изобретение известно устройство для информационного обмена («Устройство и способ приема и передачи информации с использованием шрифта Брайля», заявка RU 2015145559), использующее для коммуникации шрифт Брайля, устройство содержит вибраторы и контактные группы.
Способ обмена информацией неочевидно связан со шрифтом Брайля, требует затратить большое время на обучение. При использовании данного устройства пользователю приходится вводить служебный символ после каждой буквы, что резко снижает скорость ввода информации при формировании отправляемого сообщения.
Известно другое устройство для информационного обмена, использующее для коммуникации азбуку Лорма (https://novate.ru/blogs/260512/20795/ «Мобильная перчатка Лорма»), содержащее располагаемое на манипуляторе гибкое основание, на котором закреплены тактильные элементы, выполненные датчиками и используемые при формировании информационного сообщения для его отправления, и тактильные элементы в виде мини-вибраторов, используемые при приеме информационного сообщения, расположенные в определенных точках ладони, соответствующих конкретным буквам алфавита Лорма. Гибкое основание выполнено в виде перчатки.
Известен способ для информационного обмена (https://novate.ru/blogs/260512/20795/), заключающийся в том, что для отправления информационного сообщения осуществляют его ввод посредством нажатия на тактильные элементы - датчики, которыми снабжено располагаемое на манипуляторе гибкое основание, локализованные в определенных точках ладони, соответствующих конкретным буквам алфавита Лорма, импульсы от нажатия преобразуют в сигналы, перекодируемые в текст, посредством Bluetooth отправляемые на воспринимаемое устройство (телефон), для приема информационного сообщения указанную операцию осуществляют в другую сторону, кодируя текст в сигналы, передавая сообщение на тактильные элементы - мини-вибраторы, которыми снабжено располагаемое на манипуляторе гибкое основание, локализованные в определенных точках ладони, соответствующих конкретным буквам алфавита Лорма, и обеспечивающие возникновение вибраций в указанных точках.
Недостатками данных решений является большое количество элементов, вследствие чего возрастает величина погрешности, существует большая вероятность случайного срабатывания устройства, а также снижается временной ресурс использования устройства, и его надежность. Кроме того, недостатком данных решений является необходимость использования обеих рук.
Азбука Лорма менее распространена по сравнению с алфавитом Брайля, для ее использования пользователю придется потратить время на дополнительное обучение.
Наиболее близкими аналогами является устройство и способ для информационного обмена (патент RU 2141685 на изобретение «Способ ввода информации и устройство для его осуществления»).
Устройство содержит располагаемое на манипуляторе гибкое или эластичное основание, на котором закреплены тактильные элементы, связанные с контроллером. В устройстве по крайней мере один тактильный элемент размещен и зафиксирован по крайней мере на одной фаланге по крайней мере одного пальца посредством гибкого или эластичного основания, причем тактильный элемент расположен в поле доступа концевой фаланги пальца этой же руки. Тактильные элементы расположены в виде информационной матрицы Брайля и выполнены в виде датчиков тактильной чувствительности, например в виде обмоток возбуждения электромагнитных вибраторов, обращенных к кожному покрову пальцев руки, - виброэлементов.
Способ для информационного обмена заключается в том, что палец руки приближают к тактильному элементу, нажимают на него и возвращают палец в исходное состояние. В способе по крайней мере один тактильный элемент размещают при помощи располагаемого на манипуляторе гибкого или эластичного основания по крайней мере на одной фаланге по крайней мере одного пальца, фиксируют его в положении, обеспечивающем точную идентификацию тактильного элемента, который располагают в поле доступа концевой фаланги пальца этой же руки, два пальца одной руки сближают и концевой фалангой одного пальца нажимают на тактильный элемент другого.
Концевой фалангой одного пальца касаются тактильного элемента, идентифицируют его и затем нажимают. Тактильный элемент размещают над выступом, прилегающим к поверхности пальца. На концевой фаланге пальца располагают проводящую накладку. Тактильные элементы располагают в виде клавиш пишущей машинки. На концевой фаланге пальца размещают один контакт, а второй контакт располагают на основании и путем соприкосновения двух пальцев замыкают контакты. Концевой фалангой одного пальца нажимают на тактильный элемент и замыкают его контакты.
Тактильные элементы располагают на основании в виде информационной матрицы, воспроизводящей символы, и подают сигналы на соответствующие тактильные элементы, которые возбуждают рецепторы кожного покрова на участках поверхности пальцев рук, прилегающих к соответствующему тактильному элементу, и таким образом считывают информацию. В частном случае тактильные элементы располагают на основании в виде информационной матрицы, воспроизводящей брайлевские значки, и подают сигналы на соответствующие тактильные элементы, которые возбуждают рецепторы кожного покрова на участках поверхности пальцев рук, прилегающих к соответствующему тактильному элементу, и таким образом считывают информацию.
Недостатками данных устройства и способа является большое количество элементов, и, как следствие, существует большая вероятность погрешности, случайного срабатывания устройства. Кроме того, данные аналоги предназначены лишь для одностороннего информационного обмена. Не обеспечивают возможность для приема информации. Также следует отметить низкую скорость ввода информации и, соответственно, ее отправления.
Раскрытие изобретения
Разработка устройства и способа направлены на решение технической проблемы, связанной с созданием технических средств информационного обмена для людей с нарушением зрения и (или) слуха, отвечающих условиям удобства, надежности, легкости в освоении и повышенном сроке эксплуатации.
Техническим результатом является:
- предотвращение случайного срабатывания устройства;
- повышение временного ресурса использования;
- увеличение скорости обмена информации;
- возможность введения одновременно нескольких точек одной триады символа Брайля.
Технический результат достигается в устройстве для информационного обмена, содержащем контроллер, виброэлемент, располагаемое на манипуляторе основание, в котором устройство содержит по крайней мере один виброэлемент, на основании закреплен по крайней мере один датчик, фиксирующий удар и определяющий характер удара, датчик расположен на пальце манипулятора, указанные виброэлемент и датчик электрически связаны с контроллером.
В устройстве контроллер выполнен в составе платы управления.
В устройстве располагаемое на манипуляторе основание является эластичным или гибким.
В устройстве располагаемое на манипуляторе основание выполнено в виде митенки.
В устройстве датчик выполнен в виде МЭМС-датчика - трехосевого акселерометра.
Технический результат достигается в устройстве для информационного обмена, содержащем контроллер, виброэлемент, располагаемое на манипуляторе основание, в котором устройство содержит по крайней мере один виброэлемент, на основании реализована группа закрепленных на нем элементов, включающая по крайней мере одну пару связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, приведенные элементы группы располагают на одном пальце манипулятора, указанные датчики и виброэлементы массива виброэлементов электрически связаны с контроллером.
В устройстве контроллер выполнен в составе платы управления.
В устройстве располагаемое на манипуляторе основание является эластичным или гибким.
В устройстве располагаемое на манипуляторе основание выполнено в виде митенки.
В устройстве датчик для фиксации удара выполнен в виде трехосевого акселерометра, а датчик определения характера удара выполнен в виде тензодатчика.
В устройстве датчик для фиксации удара выполнен в виде механической кнопки, а датчик для определения характера удара выполнен в виде механического размыкателя.
Технический результат достигается в способе для информационного обмена, заключающегося в том, что с помощью устройства для информационного обмена при формировании отправляемого информационного сообщения осуществляют последовательность ударов пальцем, котроллером регистрируют сигналы с датчика, фиксирующего удар и характер удара, передают сигнал на внешнее получающее устройство с помощью вспомогательного модуля, при получении принимаемого сообщения с внешнего устройства посредством контроллера передают последовательно сигналы на виброэлемент, по тактильным ощущениям от воздействия виброэлемента осуществляют восприятие и расшифровку принимаемого сообщения.
В способе характер удара определяют с помощью программного алгоритма.
Технический результат достигается в способе для информационного обмена, заключающегося в том, что с помощью устройства для информационного обмена при формировании отправляемого информационного сообщения осуществляют последовательность ударов пальцем, котроллером регистрируют сигналы с пары связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, передают сигнал на внешнее получающее устройство с помощью вспомогательного модуля, при получении принимаемого сообщения с внешнего устройства посредством контроллера передают последовательно сигналы на виброэлемент, по тактильным ощущениям от виброэлемента осуществляют восприятие и расшифровку принимаемого сообщения.
В способе с помощью устройства для информационного обмена, включающего три пары связанных друг с другом датчиков, каждая из которых расположена на соответствующем пальце манипулятора, а также включающего три пары виброэлементов, осуществляют одновременный удар от одного до трех пальцами, вводя тем самым одну из триад комбинации символа Брайля, котроллером регистрируют сигналы с каждого датчика каждой пары датчиков как точки первой триады символа Брайля, далее таким же образом вводят вторую триаду символа Брайля, котроллером регистрируют сигналы второй триады, или, в случае отсутствия во второй триаде точек символа Брайля, по истечении установленного времени ожидания ввода второй триады, контроллером устанавливают наличие в символе Брайля только точек первой триады, осуществляют формирование сообщения и передают сигнал на внешнее получающее устройство с помощью вспомогательного модуля, при получении принимаемого сообщения с внешнего устройства посредством контроллера передают сигналы на виброэлементы в комбинациях соответствующих триадам выводимых символов, по тактильным ощущениям от воздействия массива виброэлементов осуществляют восприятие и расшифровку принимаемого сообщения.
Суть предлагаемых решений поясняется нижеследующим описанием и прилагаемыми фигурами.
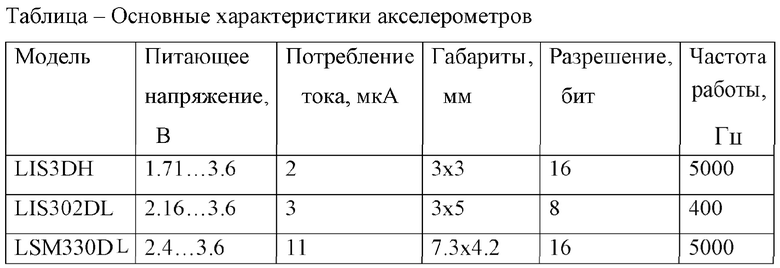
На фиг. 1 показано устройство для информационного обмена, выполненное в виде митенки, выполняющей функцию располагаемого на манипуляторе эластичного или гибкого основания, на котором расположены конструктивные элементы устройства, где:
1 - акселерометр;
2 - тензорезистор;
3 - виброэлемент массива виброэлементов;
4 - плата управления.
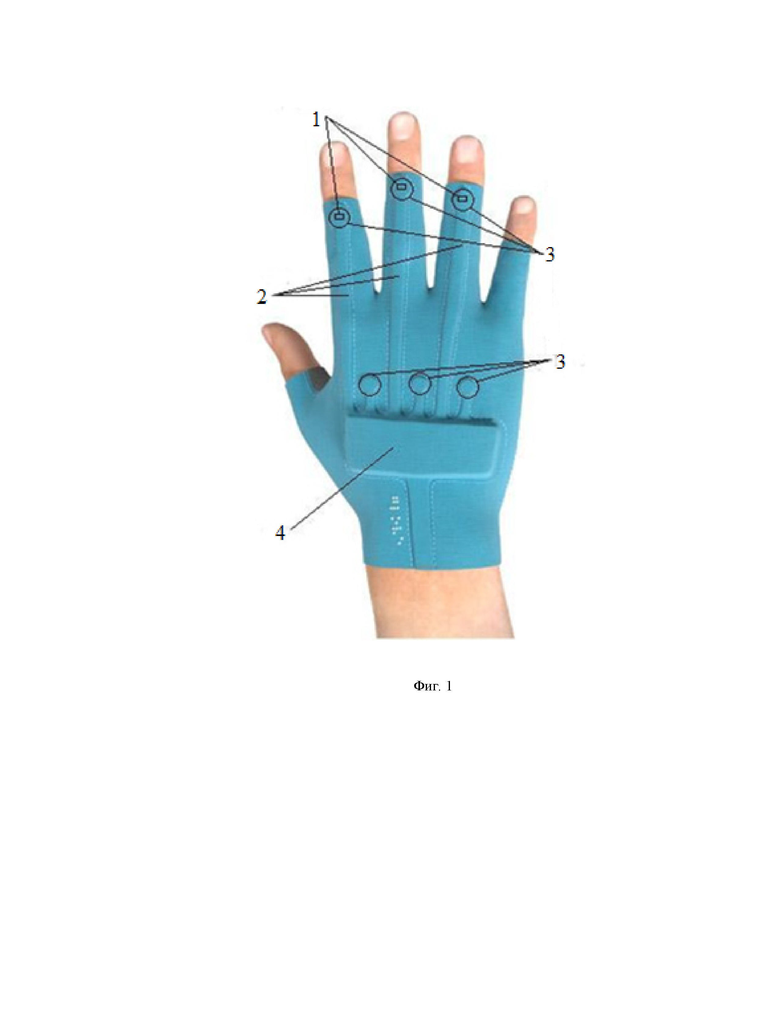
На фиг. 2 приведена Таблица 1, представляющая русский вариант шрифта Брайля, в котором каждому из приведенных брайлевских значков, поставлено в соответствие конкретная буква русского алфавита.
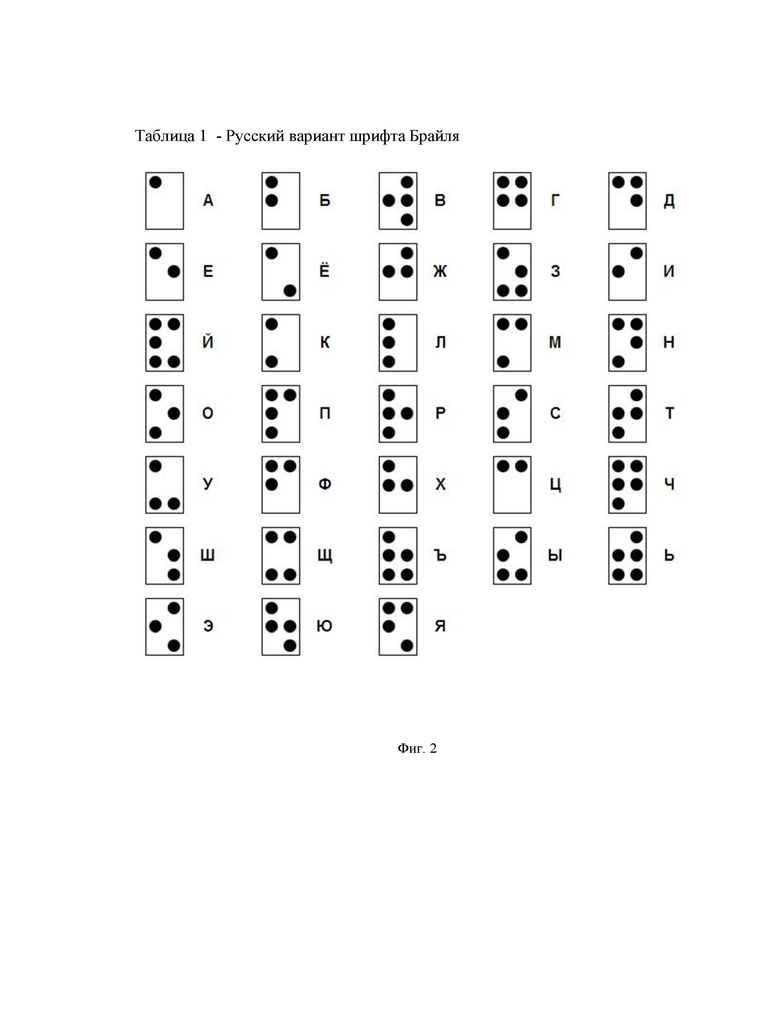
На фиг. 3 показана блок-схема основных функциональных элементов устройства для информационного обмена и вспомогательных, обеспечивающих функционирование устройства, модулей.
В предлагаемых решениях при формировании отправляемого информационного сообщения для кодирования информации лежит использование двух типов ударных воздействий, которые осуществляет манипулятор - ударное действие согнутым пальцем и ударное действие прямым пальцем. Для кодирования принимаемого сообщения используется массив виброэлементов.
При этом в основу для реализации указанного подхода кодирования при отправлении информационного сообщения положено формирование группы элементов, включающей датчики (см. фиг. 1), в которой датчики используют следующих типов. Первый тип - датчик, фиксирующий удар и определяющий характер удара (МЭМС-датчик - трехосевой акселерометр 1). Второй тип -датчик, предназначенный для фиксации удара (МЭМС-датчик - трехосевой акселерометр 1). Третий тип - датчик, обеспечивающий определение характера удара (тензодатчик - тензорезистор 2).
В целях обеспечения кодирования данные группы элементов размещают на пальце манипулятора, что обеспечивает возможность фиксации удара и определения характера удара, произведен ли он согнутым или же прямым пальцем.
Массив виброэлементов 3 размещают произвольно. Как пример, виброэлементы, входящие в массив виброэлементов, расположены на фалангах пальцев и удаленно, во внепальцевой зоне (фиг. 1).
Данный подход позволяет существенным образом снизить количество используемых элементов, что исключает случайное срабатывание устройства и снижает ошибку распознавания, повышает временной ресурс использования, увеличивает скорости обмена информации, снижает временные затраты на обучение использованию устройства.
В общем случае выполнения устройство содержит: эластичное или гибкое основание, контроллер, плату управления, массив виброэлементов, группу элементов, включающих датчик, фиксирующий удар и определяющий характер удара, нанесен ли он прямым или согнутым пальцем или пару связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, нанесен ли он прямым или согнутым пальцем.
Гибкое или эластичное основание выполнено с возможностью расположения на манипуляторе.
Группа элементов, включающих датчик, фиксирующий удар и определяющий характер удара, нанесен ли он прямым или согнутым пальцем или пару связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, нанесен ли он прямым или согнутым пальцем, закреплена на основании с возможностью размещения на пальце манипулятора.
Массив виброэлементов выполнен в составе по крайней мере одного виброэлемента или по крайней мере одной пары виброэлементов и расположен произвольно относительно манипулятора.
Каждый элемент из указанной группы элементов и каждый виброэлемент массива виброэлементов электрически связаны с контроллером.
Контроллер выполнен в составе платы управления. Контроллер предназначен для регистрации сигналов с каждого элемента группы элементов, включающих датчик, фиксирующий удар и определяющий характер удара, нанесен ли он прямым или согнутым пальцем, или пару связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, нанесен ли он прямым или согнутым пальцем, а также для подачи сигналов на каждый из виброэлементов массива виброэлементов.
Плата управления обеспечивает подачу питания, а также обеспечивает связь со вспомогательными модулями (например, модуль Bluetooth), не входящими в состав устройства, но обеспечивающими его функционирование.
В частном случае реализации устройства (фиг. 1) эластичное или гибкое основание выполнено в виде митенки.
Устройство содержит три группы элементов, включающих датчики, фиксирующие удар и определяющий характер удара, нанесен ли он прямым или согнутым пальцем, или пару связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, нанесен ли он прямым или согнутым пальцем.
Датчики в составе группы элементов, фиксирующие удар и определяющий характер удара, нанесен ли он прямым или согнутым пальцем, выполнены в виде МЭМС датчиков (акселерометров 1).
Датчики в составе группы элементов, предназначенные для фиксации удара, выполнены в виде МЭМС датчиков (акселерометров 1).
Датчики в составе группы элементов, предназначенные для определения характера удара, нанесен ли он прямым или согнутым пальцем, выполнены в виде тензодатчиков - тензорезисторов 2.
Акселерометры 1, тензорезисторы 2 и виброэлементы массива виброэлентов 3 электрически соединены посредством проводников, смонтированных внутри тканевой митенки, с контроллером на плате управления 4.
Датчики МЭМС - акселерометры 1 и тензодатчики - тензорезисторы 2 реализованы с возможностью расположения на наружной части средней фаланги указательного, среднего, безымянного пальцев (см. фиг. 1).
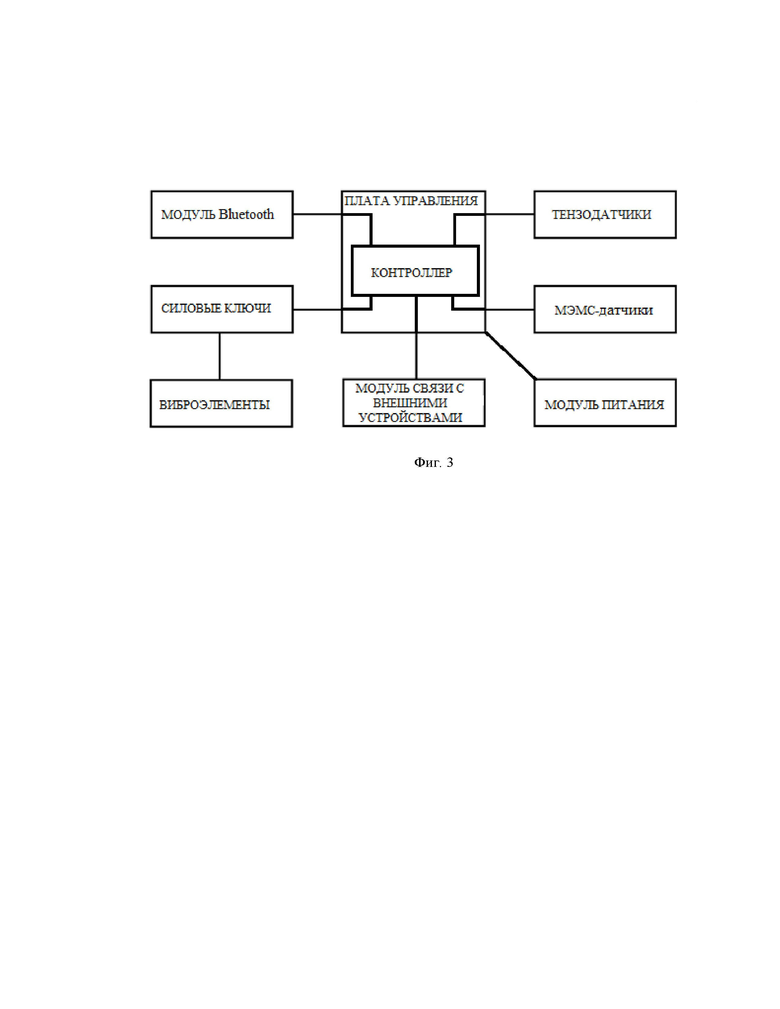
В качестве акселерометров выбрана модель LIS3DH, производителя STMicroelectronics. Основным преимуществом данной микросхемы является наличие встроенных аппаратно-реализованного цифрового фильтра и различных параметризированных алгоритмов распознавания событий. В отличии от ближайших аналогов LIS302DL и LSM330DL, LIS3DH обладает меньшими габаритами и лучшими характеристиками. Приведем для сравнения основные параметры вышеуказанных микросхем акселерометров в таблице.
На основании выше приведенных характеристик LIS3DH превосходит в большинстве необходимых параметров. Более широкий диапазон питающих напряжений и низкий ток важны при использовании перезаряжаемых аккумуляторных батарей. Также он имеет минимальные габариты и высокое разрешение сигнала, обеспечивающее лучшую точность при обработке и анализе.
Тензорезистор представляет собой плоскую проводящую пластину, при изгибе изменяющую сопротивление. Приведем некоторые примеры характеристик тензорезисторов следующих производителей.
Основные характеристики тензорезистора Flex sensor производителя Spectra symbol:
- Номинальное сопротивление 25 кОм;
- Сопротивление приращения ~25 кОм;
- Длина 5,6 см.
Основные характеристики тензорезистора FSR400 производителя Interlink Electronics:
- Номинальное сопротивление 1 МОм;
- Сопротивление приращения ~ 950 кОм;
- Длина 4,4 см.
Первая модель Flex sensor производителя Spectra symbol предпочтительнее, поскольку обладает большей активной площадью, что позволит точнее отслеживать изгибы фаланг пальца манипулятора.
Датчики в составе группы элементов, предназначенные для фиксации удара, могут быть выполнены в виде механических кнопок.
Механическая кнопка представляет собой элементарный физический механизм передачи электрического сигнала различным устройствам путем замыкания или размыкания по крайней мере двух контактов. Механическая кнопка является датчиком внешнего физического воздействия, передающим факт воздействия соединенным с датчиком устройствам.
Датчики в составе группы элементов, предназначенные для определения характера удара, нанесен ли он прямым или согнутым пальцем, могут быть выполнены в виде механических размыкателей.
Механический размыкатель представляет собой элементарный нормально замкнутый физический механизм передачи электрического сигнала различным устройствам путем замыкания или размыкания по крайней мере двух контактов. Размыкатель меняет свое состояние в случае изменения положения его переключателя, для замыкания размыкателя необходимо вернуть переключатель в исходное положение.
Массив виброэлементов, в частном случае, содержит три пары виброэлементов - три виброэлемента, располагаемые на средних фалангах указательного, среднего и безымянного пальцах, конструктивно они жестко соединены с МЭМС датчиками, и три виброэлемента, располагаемые на наружной части кисти манипулятора.
Виброэлементы могут быть реализованы также, как реализованы тактильные элементы в указанном ближайшем аналоге - в виде обмоток возбуждения электромагнитных вибраторов, обращенных, например, к кожному покрову пальцев манипулятора.
С платой управления 4 связан аккумулятор для обеспечения питания датчиков и виброэлементов.
Плата управления 4 с контроллером является коммерчески доступным компонентом устройства. Можно использовать микроконтроллер одного из ведущих производителей на рынке: STMicroelectronics, Microchip (Atmel), Texas Instruments. В устройстве использован микроконтроллер STM32F103C8T6 в корпусе LQFP48. Исходя из имеющих микроконтроллеров одного ценового сегмента, выбор его обусловлен тем, что он обладает повышенной производительностью, контроллер способен более длительно находится в экономичном режиме работы, что положительно влияет на энергопотребление.
Буквы и знаки, записанные шрифтом Брайля (в кодировке Брайля), представляют собой комбинацию из разного количества точек, расположенных в двух столбцах по три элемента в каждом (таблица 1). Условно назовем комбинацию точек в левом столбце - точками первой триады, а комбинацию точек во втором столбце - точками второй триады.
Поэтому, исходя из кодировки Брайля, в частном случае реализации устройство содержит три группы элементов (акселерометры 1 и тензорезисторы 2), по три пары виброэлементов массива виброэлементов 3 (фиг. 1).
Следует заметить, что кодироваться может любой алфавит, для которого существует аналог алфавита Брайля.
Устройство работает следующим образом.
В общем случае, для формирования отправляемого информационного сообщения манипулятор осуществляет последовательность ударов согнутым пальцем или прямым пальцем. Контроллер регистрирует сигналы с датчика, фиксирующего удар и определяющего характер удара, нанесен ли он прямым или согнутым пальцем, или с пары связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, нанесен ли он прямым или согнутым пальцем, и передает с помощью вспомогательных модулей (например, Bluetooth) на внешнее устройство (например, персональный компьютер) (фиг. 3). Для приема информации с внешнего устройства контроллер передает сигналы на массив виброэлементов. По тактильным ощущениям от воздействия массива виброэлементов манипулятор воспринимает и расшифровывает принимаемое сообщение.
В частном случае реализации, при использовании кодировки Брайля, устройство используется следующим образом.
Для ввода информации пользователь осуществляет одновременный удар пальцами (от одного до трех, например, согнутыми, в данном случае манипулятором является рука пользователя), на которых расположены МЭМС-датчики (акселерометры), по поверхности, вводя тем самым одну из триад комбинации символа.
Контроллер регистрирует сигналы с акселерометров, определяет изменения ускорения выше порогового, и считает, что палец, соответствующий этому датчику, произвел удар.
Вместо акселерометров могут использоваться механические кнопки.
Одновременно контроллер регистрирует значение сопротивления тензорезисторов, свидетельствующее о том, согнутым или выпрямленным пальцем был произведен удар. Таким образом, значение сопротивления четко указывает к какой из триад (первой или второй) относятся введенные комбинация.
Вместо тензорезисторов могут быть использованы механические размыкатели, по сигналам с которых контроллер фиксирует, согнутым или выпрямленным пальцем был произведен удар.
В случае реализации устройства, когда в качестве группы датчиков, фиксирующих удар и определяющих характер удара, использованы только акселерометры (без тензодатчиков), используется программный алгоритм для определения характера удара (согнутым или выпрямленным пальцем он был произведен). Программный алгоритм заключается в следующем. Трехосевой акселерометр позволяет получать данные об изменении ускорения по каждой из осей устройства, что позволяет достаточно точно определять по какой из осей было максимальное изменение ускорения. Акселерометр так позиционируется относительно пальца, что при ударе выпрямленным пальцем максимальное изменение ускорения будет происходить по одной оси, а в случае удара согнутым пальцем, по другой. Эти данные можно использовать для определения характера удара, согнутым или прямым пальцем произведен удар.
Контроллер регистрирует эти удары как точки первой триады (например, удар указательным и безымянным пальцем означает, что были введены первая и третья точки триады) и ожидает ввода точек второй триады.
В случае, если за установленное время ожидания ввод точек второй триады не произведен, контроллер формирует цифровой сигнал, соответствующий введенному символу.
В случае, если пользователь производит ввод значащих точек второй триады (например, уже с выпрямленными пальцами), контроллер идентифицирует ввод значащих точек, как ввод точек второй триады. После этого контроллер передает на внешнее устройство цифровой сигнал, соответствующий введенному символу и переходит в режим ожидания нового символа.
В шрифте Брайля есть знаки и буквы, которые записываются точками, расположенными только в первой триаде, но нет ни одного знака или буквы, которые записываются точками только во второй триаде.
При выводе информации контроллер получает сигнал от внешнего устройства и передает управляющий сигнал, соответствующий выводимому символу, на силовые ключи (микросхемы управления виброэлементами) (фиг. 3). Комбинация вибрирующих элементов, также соответствующих триадам, является выводимым символом.
В качестве сведений, подтверждающих достижение способом указанного технического результата, приводим нижеследующие примеры реализации.
Пример 1.
В качестве манипулятора используют руку человека. На манипуляторе располагают основание в виде митенки или перчатки. На пальцах манипулятора располагают три группы элементов. Каждая из групп элементов расположена отдельно на своем пальце и состоит из пары связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, нанесен ли он прямым или согнутым пальцем. Датчики, предназначенные для фиксации удара, выполнены в виде акселерометров. Датчики, предназначенные для определения характера удара - в виде тензорезисторов. Массив виброэлементов из трех пар виброэлементов располагают следующим образом. Три виброэлемента располагают на трех пальцах манипулятора, а еще три виброэлемента расположены на запястье. Плата управления с контроллером расположены на внешней стороне ладони. Каждый из датчиков в составе указанных групп элементов и каждый виброэлемент массива виброэлементов электрически связывают с контроллером на плате управления.
Далее осуществляют ввод информации на внешнее устройство фразу, например, «где». Фраза состоит из трех букв (символов), причем (см. фиг. 2) каждая буква в кодировке шрифта Брайля содержит точки и в первой, и во второй триаде. Пусть удары согнутыми пальцами относятся к введению точек первой триады, а удары прямыми пальцами относятся к введению точек второй триады.
Осуществляют последовательность ударов пальцами.
Для буквы «г» производят удар согнутыми средним и безымянным пальцами. Контроллером регистрируют сигналы с датчиков, фиксирующих удар, и с датчиков, предназначенных для определения характера удара, как точки первой триады символа Брайля. Затем, для буквы «г» производят удар уже выпрямленными средним и безымянным пальцем, вводя таким образом точки второй триады символа Брайля. Контроллером формируют и отправляют информационное сообщение с помощью вспомогательного модуля Bluetooth на внешнее устройство, например, смартфон.
Далее осуществляют ввод следующей буквы, «д». Производят удар согнутым безымянным пальцем. Контроллером регистрируют ввод точек первой триады. Далее осуществляют удар прямым средним и безымянным пальцами. Контроллером регистрируют ввод точек второй триады символа Брайля, формируют и отправляют информационное сообщение на внешнее устройство.
Затем осуществляют ввод буквы «е». Производят удар согнутым безымянным пальцем. Контроллером регистрируют ввод точек первой триады. Далее осуществляют удар прямым средним пальцем. Контроллером регистрируют ввод точек второй триады символа Брайля, формируют и отправляют информационное сообщение на внешнее устройство.
При получении принимаемого сообщения с внешнего устройства, например, ответа (на предыдущую фразу) «дома» осуществляют следующее.
Последовательно передают посредством контроллера сигналы на виброэлементы массива виброэлементов. «Дома» содержит четыре буквы (символа), причем буква «а» не содержит точек во второй триаде символа Брайля (см. фиг. 2).
Пусть виброэлементы, расположенные на пальцах руки, соответствуют первой триаде символа Брайля, а виброэлементы, расположенные на запястье, соответствуют второй триаде символа Брайля.
Для приема буквы «д» посредством контроллера передают сигналы на виброэлемент, расположенный на безымянном пальце, и на виброэлементы на запястье (на средний виброэлемент и на крайний, соответствующий кодировке, виброэлемент). По тактильным ощущениям от воздействия массива виброэлементов осуществляют восприятие и расшифровку принимаемой буквы «д».
Далее осуществляют прием буквы «о». Посредством контроллера передают сигналы на виброэлементы, расположенные на указательном и безымянном пальцах, и на средний расположенный на запястье виброэлемент. По тактильным ощущениям от воздействия массива виброэлементов осуществляют восприятие и расшифровку принимаемой буквы «о».
Далее осуществляют прием буквы «м». Посредством контроллера передают сигналы на виброэлементы, расположенные на указательном и безымянном пальцах, и на крайний, расположенный на запястье и соответствующий кодировке, виброэлемент. По тактильным ощущениям от воздействия массива виброэлементов осуществляют восприятие и расшифровку принимаемой буквы «м».
Далее осуществляют прием буквы «а». Посредством контроллера передают сигнал на виброэлемент, расположенный на безымянном пальце. По тактильным ощущениям от воздействия массива виброэлементов осуществляют восприятие и расшифровку принимаемой буквы «а».
Пример 2
В качестве манипулятора используют руку человека. На манипуляторе располагают основание в виде перчатки. На пальцах манипулятора располагают три группы элементов. Каждая из групп элементов расположена отдельно на своем пальце и состоит из датчика, фиксирующего удар и определяющего характер удара, нанесен ли он прямым или согнутым пальцем. Датчики выполнены в виде акселерометров. Массив виброэлементов из трех пар виброэлементов располагают следующим образом. Три виброэлемента располагают на трех пальцах манипулятора, а еще три виброэлемента расположены на запястье. Плата управления с контроллером расположены на внешней стороне ладони. Каждый из датчиков в составе указанных групп элементов и каждый виброэлемент массива виброэлементов электрически связывают с контроллером на плате управления.
Ввод и вывод информации производится аналогично примеру 1, отличие заключается в том, что при вводе информации для определения характера удара, нанесен он согнутым или выпрямленным пальцем, используется сложный программный алгоритм. По алгоритму обрабатывают сигналы с акселерометров и фиксируют, был ли нанесен удар, а также каким образом он был нанесен - согнутым или выпрямленным пальцем.
Пример 3
В качестве манипулятора используют руку человека. На манипуляторе располагают основание в виде перчатки. На пальцах манипулятора располагают три группы элементов. Каждая из групп элементов расположена отдельно на своем пальце и состоит из механической кнопки, фиксирующей удар (касание) и механического размыкателя, определяющего, произведен удар прямым или согнутым пальцем. Массив виброэлементов из трех пар виброэлементов располагают следующим образом. Три виброэлемента располагают на трех пальцах манипулятора, а еще три виброэлемента расположены на запястье. Плата управления с контроллером расположены на внешней стороне ладони. Каждый из датчиков в составе указанных групп элементов и каждый виброэлемент массива виброэлементов электрически связывают с контроллером на плате управления.
Ввод и вывод информации производится аналогично примеру 1, отличие заключается в том, что при вводе информации для определения характера удара, произведен он согнутым или выпрямленным пальцем, используется сигнал с механического размыкателя. По алгоритму обрабатывают сигналы с кнопок и фиксируют, был ли произведен удар, а также каким образом он был выполнен - согнутым или выпрямленным пальцем.
Изобретения относятся к вычислительной технике и могут быть использованы для информационного обмена с людьми с нарушением зрения и/или слуха. Техническим результатом является предотвращение случайного срабатывания устройства, повышение временного ресурса использования, увеличение скорости обмена информации, возможность введения одновременно нескольких точек одной триады символа Брайля. Устройство для информационного обмена содержит контроллер, виброэлемент, располагаемое на манипуляторе основание, причем содержит по крайней мере одну пару виброэлементов, при этом виброэлементы расположены как на пальцах манипулятора, так и вне пальцевой зоны, на основании закреплен по крайней мере один датчик, фиксирующий удар и определяющий характер удара, датчик расположен на пальце манипулятора, указанные виброэлементы и датчик электрически связаны с контроллером. 4 н. и 11 з.п. ф-лы, 3 ил., 1 табл.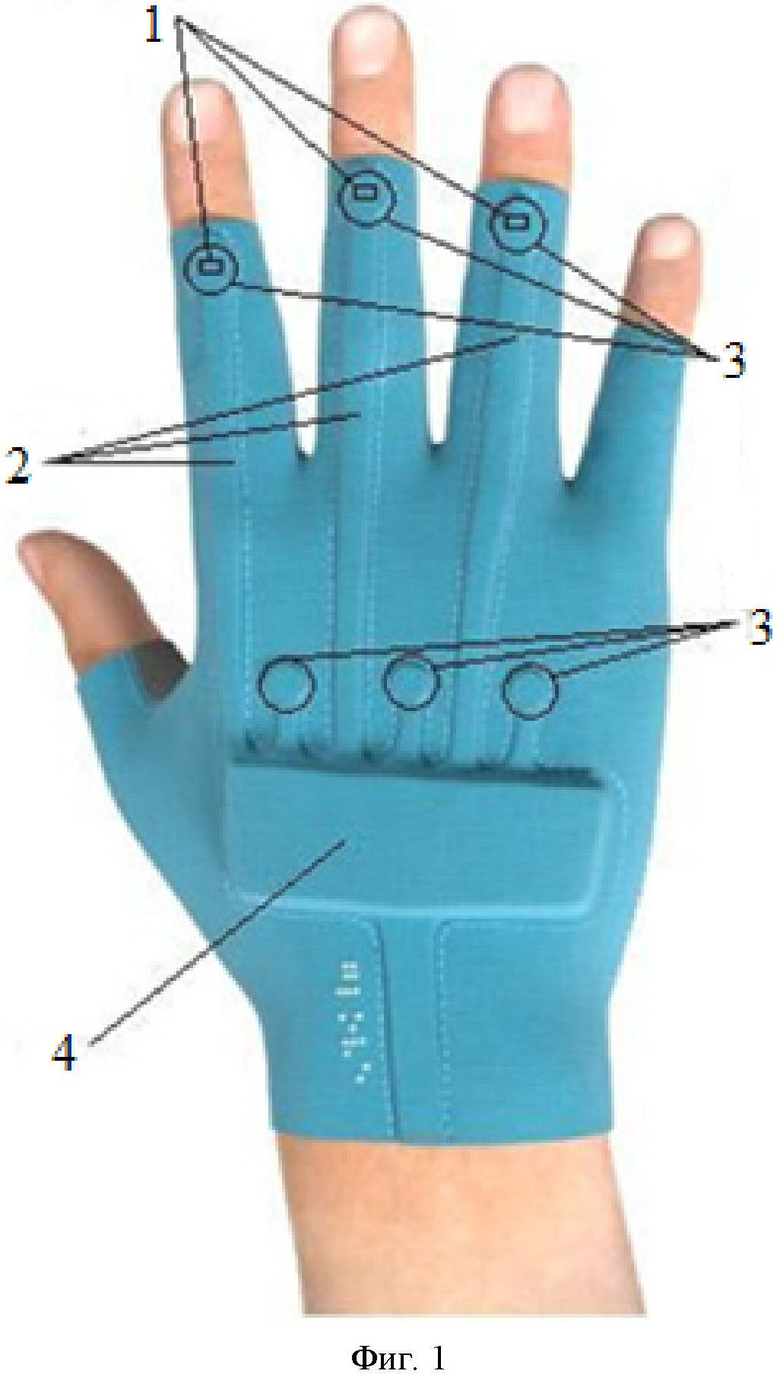
1. Устройство для информационного обмена, содержащее контроллер, виброэлемент, располагаемое на манипуляторе основание, отличающееся тем, что содержит по крайней мере одну пару виброэлементов, при этом виброэлементы расположены как на пальцах манипулятора, так и вне пальцевой зоны, на основании закреплен по крайней мере один датчик, фиксирующий удар и определяющий характер удара, датчик расположен на пальце манипулятора, указанные виброэлементы и датчик электрически связаны с контроллером.
2. Устройство по п. 1, отличающееся тем, что контроллер выполнен в составе платы управления.
3. Устройство по п. 1, отличающееся тем, что располагаемое на манипуляторе основание является эластичным или гибким.
4. Устройство по п. 1, отличающееся тем, что располагаемое на манипуляторе основание выполнено в виде митенки.
5. Устройство по п. 1, отличающееся тем, что датчик выполнен в виде МЭМС-датчика - трехосевого акселерометра.
6. Устройство для информационного обмена, содержащее контроллер, виброэлементы, располагаемое на манипуляторе основание, отличающееся тем, что содержит по крайней мере одну пару виброэлементов, при этом виброэлементы расположены как на пальцах манипулятора, так и вне пальцевой зоны, на основании реализована группа закрепленных на нем элементов, включающая по крайней мере одну пару связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, приведенные элементы группы располагают на одном пальце манипулятора, указанные датчики и виброэлементы электрически связаны с контроллером.
7. Устройство по п. 6, отличающееся тем, что контроллер выполнен в составе платы управления.
8. Устройство по п. 6, отличающееся тем, что располагаемое на манипуляторе основание является эластичным или гибким.
9. Устройство по п. 6, отличающееся тем, что располагаемое на манипуляторе основание выполнено в виде митенки.
10. Устройство по п. 6, отличающееся тем, что датчик для фиксации удара выполнен в виде трехосевого акселерометра, а датчик определения характера удара выполнен в виде тензодатчика.
11. Устройство по п. 6, отличающееся тем, что датчик для фиксации удара выполнен в виде механической кнопки, а датчик для определения характера удара выполнен в виде механического размыкателя.
12. Способ для информационного обмена, заключающийся в том, что с помощью устройства для информационного обмена при формировании отправляемого информационного сообщения осуществляют последовательность в том числе из одновременных ударов пальцами, контроллером регистрируют сигналы с датчика, фиксирующего удар и характер удара, передают сигнал на внешнее получающее устройство с помощью вспомогательного модуля, при получении принимаемого сообщения с внешнего устройства посредством контроллера передают последовательно сигналы на виброэлементы, по тактильным ощущениям от воздействия виброэлементов осуществляют восприятие и расшифровку принимаемого сообщения.
13. Способ для информационного обмена по п. 12, отличающийся тем, что характер удара определяют с помощью программного алгоритма.
14. Способ для информационного обмена, заключающийся в том, что с помощью устройства для информационного обмена при формировании отправляемого информационного сообщения осуществляют последовательность в том числе из одновременных ударов пальцами, контроллером регистрируют сигналы с пары связанных друг с другом датчиков, один из которых предназначен для фиксации удара, а второй - для определения характера удара, передают сигнал на внешнее получающее устройство с помощью вспомогательного модуля, при получении принимаемого сообщения с внешнего устройства посредством контроллера передают последовательно сигналы на виброэлементы, по тактильным ощущениям от виброэлементов осуществляют восприятие и расшифровку принимаемого сообщения.
15. Способ для информационного обмена по п. 14, отличающийся тем, что с помощью устройства для информационного обмена, включающего три пары связанных друг с другом датчиков, каждая из которых расположена на соответствующем пальце манипулятора, а также включающего три пары виброэлементов, осуществляют одновременный удар от одного до трех пальцами, вводя тем самым одну из триад комбинации символа Брайля, контроллером регистрируют сигналы с каждого датчика каждой пары датчиков как точки первой триады символа Брайля, далее таким же образом вводят вторую триаду символа Брайля, контроллером регистрируют сигналы второй триады, или, в случае отсутствия во второй триаде точек символа Брайля, по истечении установленного времени ожидания ввода второй триады, контроллером устанавливают наличие в символе Брайля только точек первой триады, осуществляют формирование сообщения и передают сигнал на внешнее получающее устройство с помощью вспомогательного модуля, при получении принимаемого сообщения с внешнего устройства посредством контроллера передают сигналы на виброэлементы в комбинациях соответствующих триадам выводимых символов, по тактильным ощущениям от воздействия массива виброэлементов осуществляют восприятие и расшифровку принимаемого сообщения.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 6035274 A, 07.03.2000 | |||
| US 6380923 B1, 30.04.2002 | |||
| УСТРОЙСТВО И СПОСОБ ПРИЁМА И ПЕРЕДАЧИ ИНФОРМАЦИИ ПОСРЕДСТВОМ ШРИФТА БРАЙЛЯ | 2016 |
|
RU2651444C2 |
| БЕСФИТИЛЬНАЯ ГОРЕЛКА ДЛЯ КЕРОСИНОВОЙ КУХНИ | 1926 |
|
SU10895A1 |

