Область техники
Изобретение относится к вычислительной технике и может быть использовано для ввода информации.
Предшествующий уровень техники
Одной из главных задач при создании устройств ввода информации является повышение их эргономичности.
Известны конструкции эргономичных клавиатур, например, известна эргономичная клавиатура (патент США 5612691) содержащая не менее двух секций с возможностью их поворота и наклона друг относительно друга при помощи шарнира.
Также известна эргономичная клавиатура (патент США 7338224) содержащая эргономичные клавиши, оптимально расположенные для ввода информации пользователем.
Известно также устройство для ввода информации, выполненное в виде браслета, использующее движения запястья руки (заявка США 20160299570). Жесты запястья распознают при помощи датчиков в браслете. Конкретный жест может быть определен из базы данных на основе анализа сигналов датчиков.
Известно также устройство в виде трехточечного ремня для фиксации фотокамеры (заявка Японии 2013-134682t), расположенного на кисти руки.
Известен также способ и система для виртуального устройства ввода информации (заявка США 20130016070) согласно которому лазерный проектор, установленный в очках пользователя проецирует виртуальную клавиатуру на руку пользователя, а камера, расположенная в очках пользователя, фиксирует его жесты. Камера распознает такие жесты, как нажатие виртуальных клавиш, так и перемещения руки.
Известен также способ ввода информации и устройство для его осуществления (патент РФ 2141685) при котором палец руки приближают к тактильному элементу, нажимают на него и возвращают палец в исходное состояние, при этом один тактильный элемент размещают при помощи основания, например гибкого или эластичного, на одной фаланге пальца. Затем фиксируют его в положении, обеспечивающим точную идентификацию тактильного элемента, который располагают в поле доступа концевой фаланги пальца этой же руки, два пальца одной руки сближают и концевой фалангой одного пальца нажимают на тактильный элемент другого.
Известен также способ и устройство для оптического ввода команд или данных (патент ЕР0554492). В патенте описан способ ввода информации пользователем, позволяющий анализировать движения руки и пальцев человека. Способ позволяет эмулировать различные типы управляемых вручную устройств ввода (мышь, клавиатура и т.д.). Согласно способу наблюдаются движения руки и пальцев пользователя при помощи системы, включающей ТВ-датчик, средства для оцифровки и обработки сигналов от указанного ТВ-датчика, при этом отслеживаются положения и активные движения руки и/или пальцев пользователя, которые в дальнейшем анализируются и интерпретируются как соответствующие входные данные или команды.
Наиболее близким к заявляемому техническому решению является мобильное устройство и способ его управления (заявка США 20160127624). Устройство включает в себя проектор изображения с виртуальным пользовательским интерфейсом, экран, камеру для съемки изображения и процессор, который сконфигурирован для обнаружения указанной области изображения, снятой камерой. Ввод информации осуществляют при помощи виртуального экрана (прототип). Недостатками известных устройств являются:
- неудобство в работе (низкая эргономичность);
- большая масса и габариты;
- низкая надежность обработки информации;
- неудобство при использовании для людей с физическими недостатками.
Раскрытие изобретения
Целью изобретения является расширение функциональных возможностей и областей применения, увеличение эргономичности, снижение массы и габаритов, а также возможность использования для людей с физическими недостатками. Также возможно увеличение объема передаваемой информации в единицу времени и повышение универсальности использования устройства путем изготовления его в виде отдельного съемного модуля.
Поставленная цель достигается тем, что в способе ввода информации, при котором камера захватывает изображения движения пальцев руки пользователя относительно элементов информационной матрицы, которые в последующем идентифицируют и распознают с выдачей команд управления на терминальное устройство, камеру располагают на ладонной поверхности кисти с возможностью захвата движений пальца или пальцев руки относительно друг друга и/или относительно элементов информационной матрицы камерой и размещают на замкнутом или разомкнутом основании, располагающимся на ладонной и тыльной поверхности кисти.
Указанная цель достигается также тем, что на ладонной поверхности кисти располагают проектор, формирующий виртуальную информационную матрицу с элементами на какой-либо поверхности, при этом камеру располагают с возможностью обзора (фиксации) движений пальца или пальцев относительно друг друга и/или относительно элементов виртуальной информационной матрицы.
Указанная цель достигается также тем, что движение пальца относительно выбранного элемента информационной матрицы идентифицируют по его расположению относительно других элементов информационной матрицы, находящихся в поле зрения камеры. Указанная цель достигается также тем, что информационную матрицу с элементами изготавливают с учетом анатомических характеристик пользователя, варьируя при этом -размеры, геометрию, расположение элементов информационной матрицы. Указанная цель достигается также тем, что движения пальца или пальцев руки относительно информационной матрицы интерпретируют как движения компьютерной мышки с нажатием управляющих клавиш компьютерной мышки с выдачей команд управления на терминальное устройство.
Указанная цель достигается также тем, что в устройстве ввода информации, содержащем камеру, размещенную на основании и связанную с терминальным устройством, камера на основании размещена со стороны ладонной поверхности кисти с возможностью отслеживания движений пальца или пальцев руки относительно друг друга и/или относительно элементов информационной матрицы.
Указанная цель достигается также тем, что камера, элемент питания, передатчик и микроконтроллер выполнены в виде отдельного съемного модуля.
Указанная цель достигается также тем, что камера оснащена сверхширокоугольным объективом.
Указанная цель достигается также тем, что основание выполнено в виде браслета или в виде часов, причем камера расположена на стороне браслета или часов, обращенной объективом в сторону ладонной поверхности кисти, с возможностью захвата движений пальцев руки относительно друг друга и/или относительно элементов информационной матрицы.
Указанная цель достигается также тем, что основание с камерой размещено на проксимальной фаланге пальцев.
Краткое описание фигур чертежей
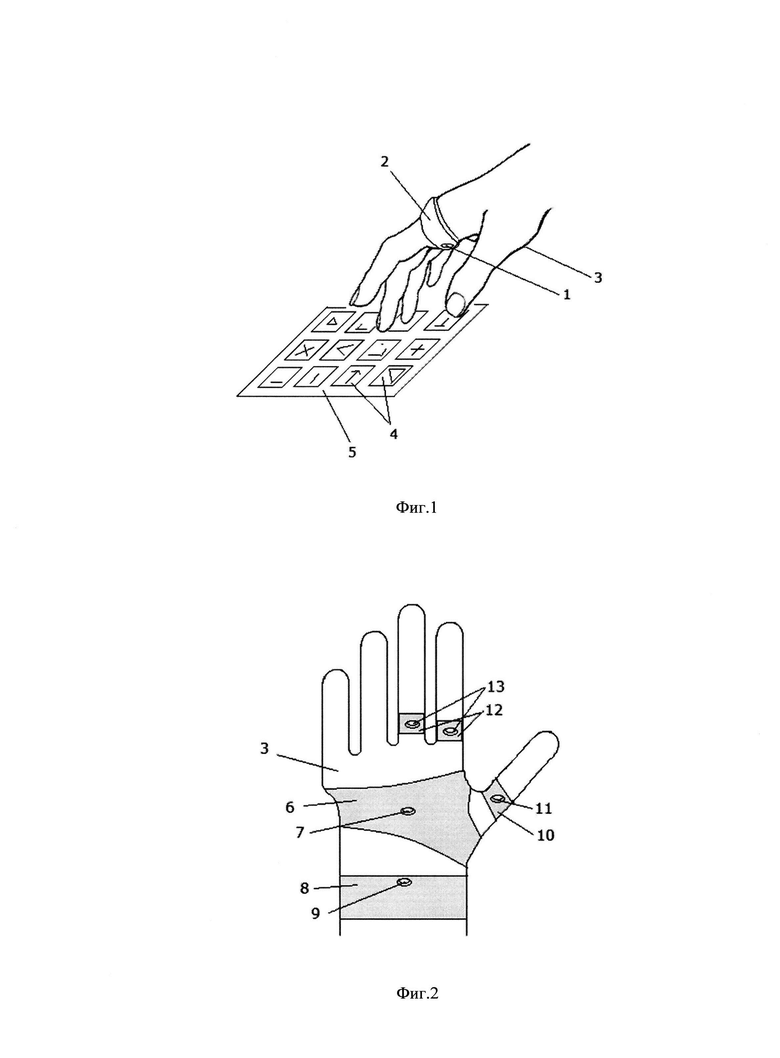
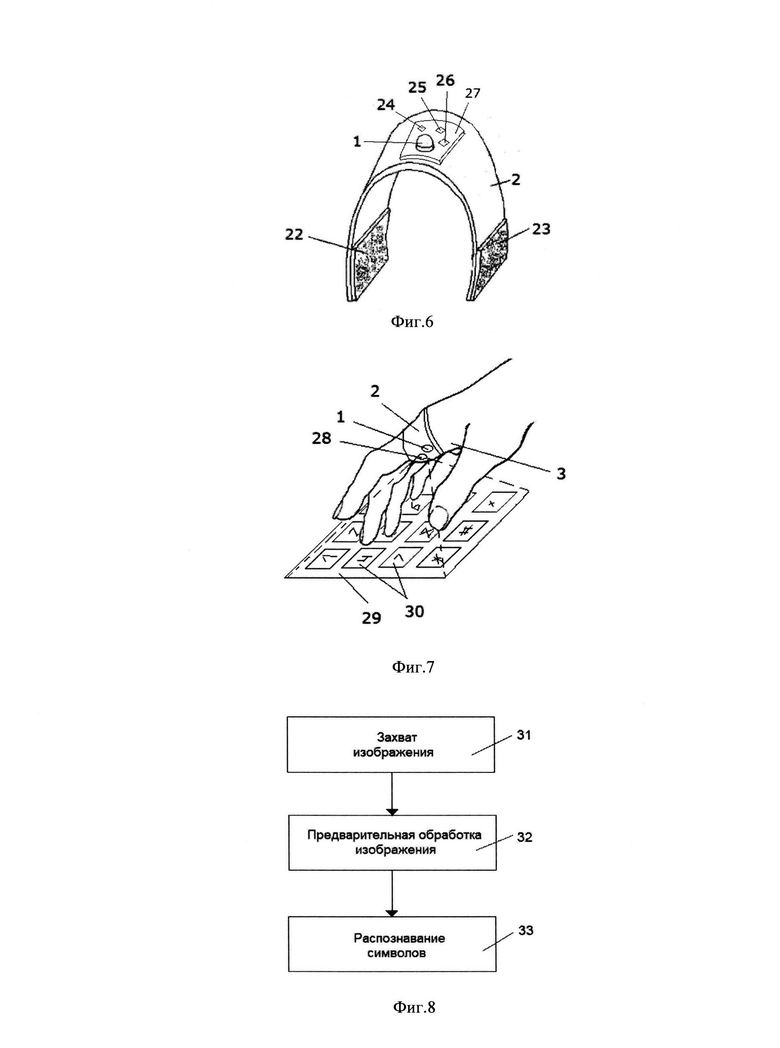
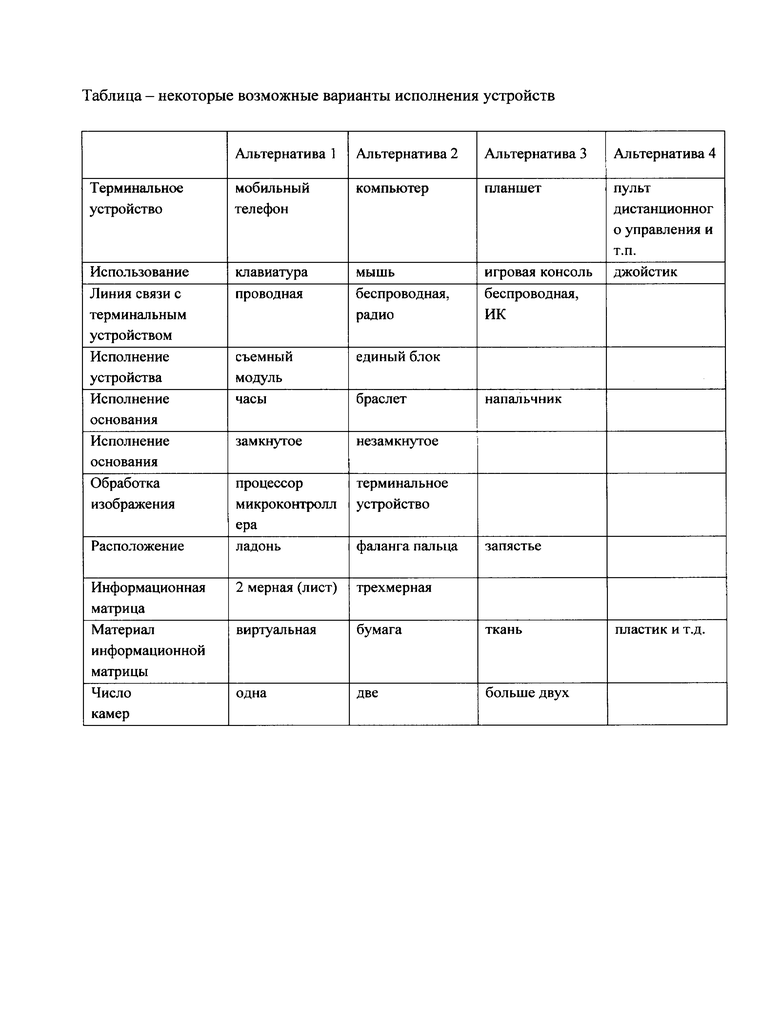
Способ и устройство поясняются чертежами, где на фиг. 1 показан общий вид устройства, на фиг. 2 и 3 изображены возможные схемы расположения устройства на стороне ладонной поверхности кисти руки, на фиг. 4 и 5 даны углы обзора камеры устройства, на фиг. 6 изображено устройство со съемным модулем, на фиг. 7 изображено устройство с проектором и виртуальной информационной матрицей, на фиг. 8 показана возможная блок схема устройства, а на фиг. 9 обработанное изображение, захваченное камерой расположенной на ладонной поверхности кисти руки. В таблице представлены возможные варианты исполнения устройства.
Устройство для ввода информации содержит камеру 1 (фиг. 1), размещенную на основании 2 и связанную линией связи с терминальным устройством (не изображены), при этом камера 1 на основании 2 размещена на ладонной поверхности кисти 3 с возможностью отслеживания (мониторинга) движений пальцев руки относительно друг друга и относительно элементов 4 информационной матрицы 5. Камера 1 имеет угол обзора позволяющий отслеживать движения пальцев руки относительно друг друга и относительно элементов 4 информационной матрицы 5. Это достигается использованием, например, сверхширокоугольной камеры или камеры типа «рыбий глаз», или соответствующими насадками (объективами) на камеру. Информационная матрица 5 расположена на какой-либо поверхности (не показана), например, на поверхности стола. Камера 1 может быть соединена посредством линии связи с различными терминальными устройствами, например, с мобильными устройствами - мобильным телефоном, планшетом, также с игровой консолью, ноутбуком, компьютером, пультом дистанционного управления и т.п. Линия связи может быть выполнена в виде проводного или беспроводного соединения. Питание камеры осуществляется от элемента питания (аккумулятора или батарейки), размещенного на основании 2 (на рисунке не показан) или осуществляется при помощи проводного соединения, например от USB соединения от терминального устройства.
Расположение камеры 1 и основания 2 позволяет осуществить съемку камерой 1 взаимодействия и взаимного расположения пальца или пальцев, преимущественно концевых фаланг пальцев с элементом 4 информационной матрицы 5. Основание 2 может быть выполнено гибким, например, из пластмассы или эластичным, например, из латекса или кожи и может представлять собой как замкнутую оболочку с фиксацией, так и разомкнутую оболочку. Также основание 2 может быть выполнено прозрачным, например, из прозрачного пластика. Устройство может быть расположено на одной или двух руках пользователя.
Основание может быть выполнено в виде перчатки, выполненной с пальцами или без пальцев (не изображена) или в виде замкнутой или незамкнутой оболочки (ленты) 6 (фиг. 2), частично расположенной со стороны ладонной поверхности кисти руки 3, а частично со стороны тыльной поверхности кисти руки (не обозначена) с камерой 7, которая расположена на ладонной поверхности кисти 3, с вырезом для большого пальца. Основание 8 также может быть выполнено в виде замкнутой или незамкнутой оболочки расположенной на запястье руки на ладонной 3 и тыльной сторонах поверхности кисти, при этом камера 9 расположена и ориентирована с возможностью отслеживания (мониторинга) движений пальцев руки. Основание 8 может быть выполнено в виде браслета, ремешка, фитнесс-браслета, в виде часов и т.п., причем камера расположена на стороне браслета или часов, обращенной объективом в сторону пальцев, с возможностью отслеживания (мониторинга) движений пальцев руки относительно друг друга и относительно элементов 4 информационной матрицы 5. Камера может быть расположена на специальном возвышении основания (не показано) 8 и/или выдвинута вперед к пальцам руки с целью лучшего обзора движений пальцев руки.
Основание также может быть выполнено в виде замкнутой или незамкнутой оболочки 10 расположенной на большом пальце руки с камерой, при этом камера 11 расположена и ориентирована с возможностью отслеживания движений пальцев руки относительно друг друга и относительно элементов 4 информационной матрицы 5.
Основание 12 также может быть выполнено в виде замкнутой или незамкнутой оболочки в виде напальчника расположенного на фаланге пальца, например на проксимальной фаланге, с камерой 13. Оснований 12 с камерами 13 может быть больше одного - для увеличения точности и надежности идентификации движений пальцев. Основание (фиг. 3) также может быть выполнено в виде замкнутой или незамкнутой оболочки 14 охватывающей кисть руки с ладонной и тыльной сторон, и камеры 15, установленной на стороне ладонной поверхности кисти 3. Замкнутая оболочка 14 может быть выполнена в виде ремешка фиксируемого при помощи застежки (не показан). Незамкнутая оболочка может быть выполнена из гибкого материала, например меди. Основание также может быть выполнено в виде замкнутой или незамкнутой оболочки 16 охватывающей несколько фаланг пальцев с камерой 17, установленной с возможностью фиксации изображения на стороне ладонной поверхности кисти 3.
Основание также может быть выполнено в виде замкнутой или незамкнутой оболочки 18 охватывающей проксимальную фалангу большого пальца с охватом части ладони с камерой 19, установленной на стороне ладонной поверхности кисти 3.
Основание также может быть выполнено в виде замкнутой или незамкнутой оболочки 20 охватывающей среднюю (не показано) или дистальную фалангу пальца с камерой 21. Камера 15 (фиг. 4) на основании 14 размещена на ладонной поверхности кисти 3 и имеет широкий угол обзора А объектива, что достигается использованием сверхширокоугольного объектива камеры 15, например, типа «рыбий глаз» или соответствующими насадками на камеру, т.е. камера имеет возможность обнаруживать движение на ладонной полусфере. Угол обзора камеры 15 может быть менее или более 180 градусов.
Камера 9 (фиг. 5) на основании 8 размещена на запястье со стороны ладонной поверхности кисти 3 и выполнена в виде браслета или наручных часов, и имеет широкий угол обзора В объектива, что достигается использованием широкоугольного объектива камеры 9 или соответствующими оптическими насадками на камеру 9. При необходимости оптические насадки на камеру 9 могут быть выполнены съемными и иметь разные углы обзора.
Основание 2 может быть выполнено в форме ленты (фиг. 6), на обеих концах которой расположены фиксаторы 22 и 23, выполненные, например, в виде ленты-липучки типа «крючок-петля». Фиксаторы 22 состоят из крючков, а фиксаторы 23 из петель. Камера 1 размещена с возможностью обзора части ладонной поверхности кисти руки и связана (не показано) с элементом питания 24, например, аккумулятором, микроконтроллером 25 и передатчиком 26, например WiFi передатчиком. При этом все элементы - 1, 24, 25 и 26 расположены в отдельном съемном модуле 27, скрепленном с основанием 2. Съемный модуль 27 выполнен с возможностью его фиксации с основанием 2.
На основании 2 (фиг. 7) может быть размещен проектор 28, например лазерный, который проецирует виртуальную информационную матрицу 29 с виртуальными элементами 30 на поверхность (не показана), при этом камера 1 на основании 2 расположена с возможностью фиксации движения пальцев руки и их взаимного расположения относительно информационной матрицы 29 с виртуальными элементами 30. В качестве поверхности может быть использованы, например, поверхность стола, лист бумаги, спинка кресла, поверхность двери, тыльная поверхность другой руки и т.п. Информационная матрица 29 с виртуальными элементами 30 может быть выполнена в виде клавиатуры, набора элементов кодового замка, элементов пульта дистанционного управления и т.п.
Блок-схема предлагаемого технического решения изображена на фиг. 8 и включает в себя блок захвата изображения 31, блок предварительной обработки изображения 32 и блок распознавания информации 33. Техническое решение может включать одну или несколько операций, функций или действий, как показано в одном или нескольких блоках 31,32 и 33. Хотя блоки показаны в последовательном порядке, эти блоки также могут быть выполнены параллельно и/или в другом порядке, чем описанные здесь. Кроме того, различные блоки могут быть объединены в меньшее количество блоков, разделены на дополнительные блоки и/или удалены на основе желаемой реализации устройства. Линии связи между блоками могут быть как проводными, так и беспроводными, например Wi-Fi, инфракрасная линия связи или Bluetooth.
Блок-схема показывает функциональность и работу одной из возможных реализаций вариантов устройства. В связи с этим каждый блок может представлять модуль, сегмент или часть программного кода, который включает одну или несколько инструкций, исполняемых процессором для реализации определенных логических функций. Код программы может храниться на любом типе читаемого носителя, например, на устройстве хранения, таком как флэш-накопитель, жесткий диск, память микроконтроллера или компьютера.
Варианты осуществления изобретения
Способ ввода информации может быть реализован следующим образом (фиг. 1). Информационную матрицу 5, в виде, например, клавиатуры, изготавливают путем графической печати на листе бумаги лазерным принтером элементов 4. Расположение и размер элементов 4 может быть выполнен в виде клавиш стандартной клавиатуры QWERTY. Также расположение и размер элементов 4 может быть выбран с учетом анатомических особенностей конкретного пользователя. В дальнейшем информационную матрицу 5 располагают на плоской поверхности, например поверхности стола, а пользователь закрепляет устройство на кисти руки.
После поступления нервного импульса от головного мозга концевая фаланга пальца руки пользователя приближается к выбранному элементу 4 информационной матрицы 5. Камера 1 расположенная на основании 2 со стороны ладонной поверхности кисти 3 захватывает движение пальцев руки относительно элементов 4 информационной матрицы 5, а также нажатие пальца руки на определенный элемент 4 информационной матрицы 5 и передает видеоизображение на терминальное устройство или в микроконтроллер (не показаны) по проводной или беспроводной линии связи (не показана). Захваченное камерой 1 изображение может предаваться как необработанный видеосигнал, так и предварительно обработанный программно в микроконтроллере (не обозначен), с целью оптимизации передачи файлов цифрового видео.
Изображение при необходимости обрабатывается, производится распознавание образа информации и сравнение с базовыми символами, находящимися в памяти терминального устройства или микроконтроллера. Поскольку символ на нажимаемом элементе 4 может быть скрыт самим пальцем от камеры 1, то акт нажатия на элемент 4 программно рассчитывается относительно видимых камерой 1 близлежащих элементов 4 информационной матрицы 5. Сам акт нажатия идентифицируется программно в процессоре терминального устройства или микроконтроллера и соответственно вырабатывается команда для сравнения, при этом используются алгоритмы сравнения с эталоном или по критериям. В дальнейшем производится выработка команды управления - например набор цифры при наборе номера мобильного телефона, буквы при наборе текста или команды пульта дистанционного управления. Анализируется одно изображение или ряд изображений, что позволяет рассматривать динамику движения пальцев, а также прогнозировать последовательность движения пальцев относительно элементов 4 информационной матрицы 5. Захват изображения оптической матрицей камеры 1 происходит в блоке 31 (фиг. 8). Перед обработкой изображения алгоритмами распознавания может проводиться его предварительная обработка в блоке 32. Например, сжатие изображения и/или обработка, направленная на улучшение качества изображения.
Она может включать фильтрацию изображения от шумов, повышение резкости и контрастности изображения, выравнивание и преобразование в используемый системой формат (фиг. 9). В дальнейшем изображение попадает на вход блока распознавания символов 33 (фиг. 8), где производится сегментация изображения. Задачей этого блока является выявление структурных единиц, например букв и символов, или отслеживание движений пальцев пользователя относительно информационной матрицы и/или относительно друг друга. В некоторых случаях для решения задачи сегментации на уровне букв могут использоваться сложные эвристические алгоритмы.
Способ ввода информации может быть также реализован следующим образом. Основание 8 изготавливают в виде браслета, который охватывает запястье (фиг. 2). Камера 9 скреплена с основанием 8, при этом объектив (не показан) камеры 1 находится на торцевой части браслета, обращенной к пальцам руки (фиг. 5) с возможностью обзора, движений пальцев относительно друг друга и/или относительно элементов информационной матрицы. Объектив камеры захватывает изображение с углом обзора В, в который попадают движения пальцев руки. Информационную матрицу 5 с элементами 4 изготавливают при помощи 3D-принтера (фиг. 1), т.е. изготавливают объемной, с учетом эргономических особенностей пользователя или группы пользователей. Пользователь закрепляет устройство на запястье. Камера 8 (фиг. 5) захватывает движение пальцев пользователя относительно друг друга и относительно элементов 4 информационной матрицы 5 и передает видеоизображение по проводной линии USB на терминальное устройство, например, планшет. Входной сигнал программно обрабатывается и нажатый элемент 4 информационной матрицы 5 распознается с последующей выработкой команды на управление терминальным устройством, например курсором планшета или вводом символа.
Способ ввода информации может быть также реализован следующим образом. Пользователь надевает устройство на палец с основанием 2 в виде ленты и скрепленным с лентой съемным модулем 27 (фиг. 6). В момент соприкосновения половинок ленты 2 происходит зацепление фиксаторов 22 и 23 - петель за крючки, и таким образом происходит фиксация устройства на пальце. Фиксация по типу "крючок-петля" позволяет многократно соединять ленту, практически без потери сил сцепления. Съемный модуль 27 с камерой 1 размещают на фаланге пальца (со стороны подушечки пальца) с возможностью обзора ладонной поверхности кисти руки и связывают с микроконтроллером 25, который связан с передатчиком 26, например WiFi. передатчиком. Питание камеры 1, микроконтроллера 25 и передатчика 26 осуществляет элемент питания 24, например аккумулятор. При этом все элементы - 1, 24, 25 и 26 располагают в отдельном съемном модуле 27. Захваченное камерой 1 изображение обрабатывается программно процессором микроконтроллера 25, где изображение (или последовательность изображений) обрабатывается, распознается и предается при помощи передатчика 26 беспроводным способом на терминальное устройство, например на дисплей или мобильный телефон.
Способ ввода информации может быть также реализован следующим образом. На основании 2 (фиг. 7) размещают камеру 1 и проектор 28. Проектор 28 проецирует, например, при помощи лазера, виртуальную информационную матрицу 29 с виртуальными элементами 30 на какую-нибудь поверхность (не показана), например, на крышку стола. Камеру 1 располагают на том же основании 2 и захватывают изображение движения пальцев руки, их взаимное расположение относительно друг друга и относительно виртуальных элементов 30 виртуальной информационной матрицы 29. Пользователь перемещает палец относительно лазерного рисунка информационной матрицы 29 с виртуальными элементами 30 и осуществляет выбор одного из виртуальных элементов 30. Камера 1 захватывает изображения пальца, когда палец движется, чтобы идентифицировать выбор одного из объектов лазерного рисунка. Изображение от камеры 1 передают в микроконтроллер или в терминальное устройство, в котором оно оцифровывается и обрабатывается. Далее программно распознается и анализируются положение и активные движения руки и/или пальцев пользователя, которые в дальнейшем интерпретируются для выработки соответствующих команд на терминальной устройство.
Способ ввода информации может быть реализован также следующим образом (фиг. 1). Информационную матрицу 5 выполняют в виде, например, напечатанной на принтере сетки или используют естественную, например, деревянную поверхность с элементами 4. Элементами 4 может служить, например текстура дерева, или, например текстура или графические изображения на ткани. Захваченные камерой 1 движения пальца или пальцев руки относительно информационной матрицы 5 программно распознают и интерпретируют как движения компьютерной мышки, распознают также как нажатие управляющих клавиш компьютерной мышки с последующей выдачей команд управления на терминальное устройство. Движения пальца параллельно поверхности информационной матрицы 5 интерпретируют, например, как движение мышки, а движения пальца или пальцев перпендикулярно поверхности информационной матрицы 5 интерпретируют как нажатие на соответствующую клавишу мышки. Сам акт нажатия распознается программно в процессоре терминального устройства или микроконтроллера с выработкой управляющей команды.
Под "камерой" понимаются устройства, выполненные в виде видеокамеры, оснащенные объективами, например, сверхширокоугольными объективами или сменными оптическими насадками - сменными объективами с разным фокусным расстоянием. Могут использоваться как одна камера, так и несколько для более точной идентификации элементов информационной матрицы и движения пальца или пальцев. Под "информационной матрицей" понимается поверхность, выполненная из искусственных или природных материалов. На поверхность информационной матрицы могут быть нанесены буквенно-символьные изображения элементов. Также может использоваться текстура поверхности природных или искусственных материалов информационной матрицы, которая представляет в этом случае поверхность, например поверхность деревянного стола или поверхность ткани. Информационная матрица может быть выполнена из бумаги, пластика, кожи, дерева, металла и т.п. Под "информационной матрицей" понимается также виртуальная информационная матрица и виртуально созданное изображение на какой-либо поверхности при помощи проектора. Под "элементами информационной матрицы" понимаются элементы, с нанесенными на них графическими изображениями в виде символьно-буквенных клавиш, цифровых клавиш, управляющих клавиш, функциональных клавиш, клавиш управления курсором, клавиш кода Брайля, в виде сетки, естественные поверхности и т.п. Также в качестве элементов может рассматриваться текстура поверхности, что целесообразно использовать при работе устройства в качестве компьютерной мышки.
Под "основанием" понимается гибкое или эластичное основание (например, из резины), имеющее в зависимости от реализации технического решения различные конструктивные исполнения - напальчник для одной фаланги пальца, перчатка, лента, ремешок, браслет и т.д. В зависимости от размеров руки основания могут индивидуально подбираться для конкретной руки. Основание может полностью охватывать кисть или часть кисти, или пальцев, или запястье или быть разомкнутым. Разомкнутое основание может быть выполнено из металла в виде разомкнутого кольцеобразного элемента, который устанавливают и фиксируют путем его сгибания, а снимают путем его разгибания. Под "ладонной поверхности кисти" понимаются, такие области поверхности руки, как пальцы, ладонь или запястье со стороны ладони. Аналогично для тыльной поверхности кисти.
Под "микроконтроллером" понимается вычислительное устройство, которое сочетает функции процессора и периферийных устройств, содержит ОЗУ и (или) ПЗУ. Под "линией связи" понимается как проводная, так и радио- или инфракрасная связь. Под "терминальным устройством" понимаются, например, различные устройства, такие, как мобильные телефоны, планшеты, компьютеры, наручные часы, браслеты, пульты дистанционного управления, дисплеи, различного рода замки и т.п.
Устройство может также использоваться в качестве мыши или джойстика с использованием данных о параллельных и перпендикулярных перемещениях пальца или пальцев относительно информационной матрицы для ввода информации о перемещении. Устройство может также использоваться в качестве пульта дистанционного управления с использованием данных о перемещении и взаимном расположении пальцев относительно информационной матрицы или других пальцев (частей ладони) для ввода информации. Устройство может также использоваться для распознавания жестов при общении глухих людей.
Промышленная применимость
При анализе изобретения на соответствие критерию "новизна" выявлено, что часть признаков заявленной совокупности является новой, следовательно, изобретение соответствует критерию "новизна".
При анализе изобретения на соответствие критерию "изобретательский уровень" выявлено, что техническое решение анализируемого объекта ново, следовательно, признаки соответствуют критерию "изобретательский уровень", поскольку оно представляет собой новую совокупность признаков, как сочетание известных признаков и нового технического свойства, и также представляет собой новое расположение, количество и связи элементов. Кроме того, посредством предлагаемого способа и устройства достигнут результат, удовлетворяющий давно существующим потребностям (ускорению ввода информации, повышению эргономичности работы).
Изобретение может использоваться в вычислительной технике, может быть тиражировано и, следовательно, соответствует критерию "промышленная применимость". Преимущества заявляемого способа и устройства ввода информации:
- малая масса и габариты;
- снижение туннельного синдрома при работе;
- удобство применения;
- адаптивность;
- возможность использования для людей с физическими недостатками;
- эргономичность, возможность учета анатомических особенностей конкретного пользователя;
- универсальность, достигаемая использованием съемного модуля,
- решение задачи распознавания жестов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЕМА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2132565C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141685C1 |
| Способ жестового управления и устройство для его реализации | 2021 |
|
RU2777910C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ СЕНСОРНОЙ ПЛОСКОСТИ | 2014 |
|
RU2577467C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2670649C9 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2012 |
|
RU2493580C1 |
| СПОСОБ, АППАРАТУРА И УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ | 2015 |
|
RU2662408C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАХВАТА ДВИЖЕНИЙ И ПОЛОЖЕНИЯ ТЕЛА ЧЕЛОВЕКА И ЧАСТЕЙ ТЕЛА ЧЕЛОВЕКА | 2017 |
|
RU2662399C1 |
| Перчатка-экзоскелет с линейными актуаторами | 2019 |
|
RU2717046C1 |


Изобретение относится к вычислительной технике и может быть использовано для ввода информации. Технический результат заключается в реализации указанного заявителем назначения заявленного изобретения, заключающегося в обеспечении ввода информации. Такой результат достигается тем, что движение пальца относительно выбранного элемента информационной матрицы идентифицируют по его расположению по отношению к другим элементам информационной матрицы, находящимся в поле зрения камеры, при этом акт взаимодействия пальца с элементом информационной матрицы программно рассчитывается относительно видимых камерой элементов информационной матрицы, соответственно вырабатывается команда для сравнения, при этом используются алгоритмы сравнения с эталоном или по критериям. 9 ил., 1 табл.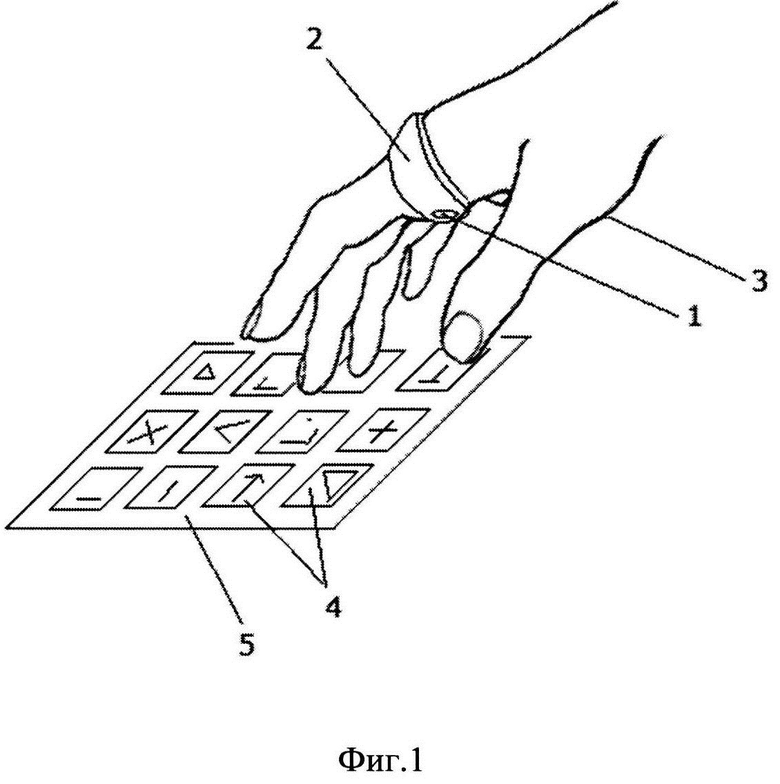
Способ ввода информации, при котором камера захватывает движения пальцев руки пользователя относительно элементов информационной матрицы, которые в последующем идентифицируют и распознают с выдачей команд управления на терминальное устройство, при этом камеру при помощи основания располагают со стороны ладонной поверхности кисти с возможностью обзора движений пальца или пальцев руки относительно друг друга и матрицы камерой, отличающийся тем, что движение пальца относительно выбранного элемента информационной матрицы идентифицируют по его расположению по отношению к другим элементам информационной матрицы, находящимся в поле зрения камеры, при этом акт взаимодействия пальца с элементом информационной матрицы программно рассчитывается относительно видимых камерой элементов информационной матрицы, соответственно вырабатывается команда для сравнения, при этом используются алгоритмы сравнения с эталоном или по критериям.
| WO 2016121034 A1, 04.08.2016 | |||
| НАСТИЛОЧНЫЙ СЛОЙ ДЛЯ СБОРНОГО МЕШКА | 2013 |
|
RU2634670C2 |
| JP 2005301583 A, 27.10.2005 | |||
| US 20160124500 A1, 05.05.2016 | |||
| US 20160127624 A1, 05.05.2016 | |||
| CN 105824431 A, 03.08.2016 | |||
| US 20170315620 A1, 02.11.2017 | |||
| US 20160370861 A1, 22.12.2016 | |||
| СПОСОБ ВВОДА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141685C1 |

