Область техники
Настоящее описание в целом относится к способам и системам для эксплуатации датчика отработавших газов с переменным напряжением в составе двигателя внутреннего сгорания.
Уровень техники и раскрытие изобретения
Результаты измерения и (или) оценки давления отработавших газов, протекающих через выпускной канал двигателя внутреннего сгорания, можно использовать в качестве входных параметров различных стратегий управления транспортным средством для управления работой двигателя. В одном примере в состав двигателя может входить специализированный отдельный датчик давления, установленный в выпускном канале двигателя выше по потоку от каталитического нейтрализатора, для измерения давления отработавших газов. Однако некоторые двигатели могут не содержать датчик давления отработавших газов. Специализированные датчики давления отработавших газов могут увеличить стоимость системы двигателя и усложнить управление ею. В другом примере давление отработавших газов может быть смоделировано по меняющимся условиям работы двигателя и (или) измерениям датчиков. Однако авторы настоящего изобретения выявили, что модели давления отработавших газов могут иметь ошибки, которые могут оказывать каскадный эффект на другие модели, использующие указанное смоделированное давление отработавших газов. Кроме того, некоторые модели могут быть ограничены неким диапазоном, в котором давление отработавших газов может быть смоделировано только при определенных условиях работы двигателя. В результате управление двигателем на основе оцененных значений давления отработавших газов может иметь сниженную точность во время его применения за пределами указанного диапазона.
В одном примере вышеуказанные недостатки можно устранить, используя способ для: оценки давления отработавших газов, протекающих в выпускном канале двигателя, по разности первого выходного сигнала и второго выходного сигнала датчика кислорода, расположенного в выпускном канале, при этом, как первый, так и второй выходные сигналы снимают после повышения опорного напряжения датчика кислорода с более низкого напряжения первой величины до более высокого напряжения второй величины. Так можно использовать имеющийся датчик двигателя (например, датчик кислорода в отработавших газах) для повышения точности оценки давления отработавших газов двигателя и, как следствие, повышения точности управления двигателем на основе оцененных значений давления отработавших газов.
В одном примере датчик отработавших газов (например, датчик кислорода в отработавших газах) можно установить в выпускном канале двигателя и использовать для получения показаний о содержании различных составляющих отработавших газов. При определенных условиях датчик отработавших газов может эксплуатироваться как датчик кислорода с переменным напряжением ПН (VVs). Во время работы в режиме ПН опорное напряжение датчика отработавших газов повышают с более низкого, базового напряжения (например, около 450 мВ) до более высокого, целевого напряжения (например, порядка 900-1100 мВ). В некоторых примерах указанное более высокое целевое напряжение может представлять собой напряжение, при котором молекулы воды частично или полностью диссоциируют в датчике кислорода, а базовое напряжение представляет собой напряжение, при котором молекулы воды не диссоциируют в датчике. Авторы настоящего изобретения выявили наличие у датчиков отработавших газов характерной зависимости от давления. Поскольку давление меняет способность кислорода проходить через диффузионный барьер датчика, выходной сигнал тока накачки датчика может характеризовать давление отработавших газов, особенно в режиме ПН. В связи с этим, способ может предусматривать формирование датчиком первого выходного сигнала во время работы датчика при напряжении более высокой, второй величины (например, целевом напряжении) и последующее формирование датчиком кислорода второго выходного сигнала во время работы датчика при напряжении той же второй величины и в условиях того же воздушно-топливного отношения (например, воздушно-топливное отношение в отработавших газах остается по существу одинаковым при формировании первого и второго выходных сигналов). Разность первого и второго выходных сигналов может указывать на изменение давления отработавших газов со времени формирования первого выходного сигнала и до формирования второго выходного сигнала. В некоторых примерах давление отработавших газов может впоследствии быть определено в момент второго выходного сигнала. Затем контроллер может отрегулировать работу двигателя в зависимости от установленного значения изменения давления отработавших газов и (или) давления отработавших газов в момент формирования второго выходного сигнала.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Подробное описание». Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Подробное описание». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание Фигур чертежа
На ФИГ. 1 представлена принципиальная схема двигателя, содержащего выпускную систему и датчик отработавших газов.
На ФИГ. 2 представлена принципиальная схема примера датчика отработавших газов.
На ФИГ. 3 представлена блок-схема способа для регулирования работы двигателя на основании смоделированного или оцененного давления отработавших газов.
На ФИГ. 4А-4В представлена блок-схема способа для оценки давления отработавших газов в двигателе с помощью датчика кислорода в отработавших газах с переменным напряжением.
На ФИГ. 5 представлена блок-схема способа для оценки влажности окружающей среды.
На ФИГ. 6 представлена блок-схема способа для оценки воздушно-топливного отношения в отработавших газах во время работы датчика кислорода в отработавших газах в режиме переменного напряжения.
На ФИГ. 7 представлен график изменения результатов оценки воздушно-топливного отношения с помощью датчика кислорода в отработавших газах в меняющихся условиях работы двигателя.
Подробное описание
Нижеследующее описание относится к системам и способам для оценки давления отработавших газов в двигателе. Как показано на ФИГ. 1, двигатель может содержать датчик кислорода в отработавших газах, расположенный в выпускном канале двигателя. Датчик кислорода может представлять собой датчик кислорода с переменным напряжением ПН (VVs), такой как датчик с ПН на ФИГ. 2. Опорное напряжение датчика кислорода может регулироваться от более низкого напряжения первой величины, при котором не происходит диссоциация водяного пара и углекислого газа, до более высокого напряжения второй величины, при котором происходит диссоциация воды и (или) углекислого газа. Датчик кислорода может формировать выходные сигналы в виде токов накачки, которые можно использовать для определения воздушно-топливного отношения отработавших газов. Датчики кислорода в отработавших газах могут зависеть от давления, что особенно ощутимо при работе датчика при более высоком напряжении второй величины. Поэтому датчик кислорода в отработавших газах можно использовать для определения давления отработавших газов, протекающих в выпускном канале, где установлен датчик. Например, на ФИГ. 4А-4В представлен способ эксплуатации датчика кислорода в отработавших газах при более высоком напряжении второй величины и определения давления отработавших газов по изменению выходного сигнала датчика кислорода в отработавших газах между двумя последовательными замерами при одном и том же напряжении и воздушно-топливном отношении. Затем контроллер может использовать результат оценки давления отработавших газов с помощью датчика кислорода непосредственно для управления двигателем, либо для подтверждения и (или) корректировки модели меняющегося давления отработавших газов, как показано на ФИГ. 3. В некоторых примерах выходные сигналы датчика кислорода в отработавших газах можно сначала корректировать с учетом влажности окружающей среды, определяемой способом на ФИГ. 5, до оценки давления отработавших газов. Кроме того, во время работы датчика кислорода в отработавших газах при более высоком напряжении второй величины (и в режиме ПН) для оценки давления отработавших газов, контроллер может оценить воздушно-топливное отношение отработавших газов способом, представленным на ФИГ. 6-7. Так можно повысить эффективность управления двигателем на основании результатов оценки давления отработавших газов в расширенном диапазоне условий работы двигателя.
Обратимся к ФИГ. 1, представляющей собой принципиальную схему, изображающую один из цилиндров многоцилиндрового двигателя 10, который может входить в состав силовой установки автомобиля. Двигателем 10 можно как минимум частично управлять с помощью системы управления, содержащей контроллер 12, и управляющих воздействий водителя 132 через устройство 130 ввода. В данном примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали ПП (РР). Камера 30 сгорания (то есть цилиндр) двигателя 10 может содержать стенки 32 цилиндра с расположенным между ними поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращение коленчатого вала. Коленчатый вал 40 может быть соединен с как минимум одним ведущим колесом транспортного средства через промежуточную систему передачи. Кроме того, для обеспечения запуска двигателя 10, с коленчатым валом 40 может быть соединен стартер через маховик.
Всасываемый воздух может поступать в камеру 30 сгорания из впускного коллектора 44 через впускной канал 42, а отработавшие газы могут выходить через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут избирательно сообщаться с камерой 30 сгорания через впускной клапан 52 и выпускной клапан 54 соответственно. В некоторых вариантах камера 30 сгорания может содержать два и несколько впускных клапана и (или) два и несколько выпускных клапана.
В данном примере впускной клапан 52 и выпускной клапан 54 могут управляться системами 51 и 53 кулачкового привода соответственно. Системы 51 и 53 кулачкового привода могут содержать один или несколько кулачков и могут быть выполнены с возможностью выполнения одной или нескольких из следующих функций: переключение профиля кулачков ППК (CPS), изменение фаз кулачкового распределения ИФКР (VCT), изменение фаз газораспределения ИФГ (VVT) и (или) изменение высоты подъема клапанов ИВПК (VVL), которыми может управлять контроллер 12 для регулирования работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 можно определять с помощью датчиков 55 и 57 положения соответственно. В других вариантах осуществления впускной клапан 52 и (или) выпускной клапан 54 могут быть электроприводными. Например, в другом варианте цилиндр 30 может содержать впускной клапан с электроприводом и выпускной клапан с кулачковым приводом, включая системы ППК и (или) ИФКР.
В некоторых вариантах осуществления каждый цилиндр двигателя 10 может быть выполнен с одной или несколькими топливными форсунками для подачи в него топлива. В качестве неограничивающего примера, цилиндр 30 показан содержащим одну топливную форсунку 66. Топливная форсунка 66 показана соединенной непосредственно с цилиндром 30 для впрыска топлива непосредственно в него пропорционально длительности импульса сигнала ДИВ (FPW), полученному от контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает то, что известно как «непосредственный впрыск» (далее также именуемый «НВ» (DI)) топлива в цилиндр 30.
Следует понимать, что в других вариантах осуществления форсунка 66 может представлять собой форсунку впрыска во впускной канал выше по потоку от цилиндра 30. Следует также понимать, что топливо в цилиндр 30 может поступать из нескольких форсунок, например, из нескольких форсунок впрыска во впускной канал, нескольких форсунок непосредственного впрыска или их комбинаций.
Топливный бак в топливной системе 172 может содержать разные виды топлива с различными характеристиками, например, с разным составом. Различия могут включать в себя: разное содержание спирта, разное октановое число, разную скрытую теплоту парообразования, разные компоненты топливной смеси и (или) комбинации этих различий и т.п. В двигателе можно использовать спиртосодержащую топливную смесь, например Е85 (состоящую приблизительно на 85% из этанола и на 15% из бензина) или М85 (состоящую приблизительно на 85% из метанола и на 15% из бензина). В другом варианте двигатель может работать на смеси с другими соотношениями бензина и этанола в баке, в том числе 100% бензина и 100% этанола, и с переменным соотношением между ними, в зависимости от содержания спирта в топливе, заправляемом водителем в бак. Кроме того, характеристики топлива в баке могут часто меняться. В одном примере водитель может в один день заправить в бак Е85, на следующий день - Е10, а на другой день - Е50. Поэтому, в зависимости от уровня и состава топлива, находящегося в баке на момент дозаправки, состав топлива в баке может динамически меняться.
Ежедневные изменения заправки бака могут, таким образом, привести к частым изменениям состава топлива в топливной системе 172, что сказывается на составе и (или) качестве топлива, подаваемого форсункой 66. Различные составы топлива, впрыскиваемого форсункой 166, в настоящем описании могут именоваться «тип топлива». В одном примере различные составы топлива могут быть качественно охарактеризованы с помощью октанового числа ОЧ (RON), процентного содержания спирта, процентного содержания этанола и т.п.
Следует понимать, что, несмотря на то, что в одном примере осуществления изобретения двигатель можно эксплуатировать с помощью осуществления впрыска топливной смеси переменного состава через форсунку непосредственного впрыска, в других вариантах двигатель можно эксплуатировать, используя две форсунки и изменяя относительное количество топлива, впрыскиваемого каждой из указанных форсунок. Также следует понимать, что, когда двигатель работает с наддувом, создаваемым нагнетательным устройством, например, турбокомпрессором или нагнетателем (не показаны), предел наддува можно увеличивать по мере увеличения содержания спирта в топливной смеси переменного состава.
Вернемся к ФИГ. 1: впускной канал 42 может содержать дроссель 62 с дроссельной заслонкой 64. В данном конкретном примере положение дроссельной заслонки 64 может изменять контроллер 12, направляя сигнал на электромотор или привод в составе дросселя 62; данную конфигурацию обычно называют «электронное управление дроссельной заслонкой» ЭУДЗ (ETC). Таким образом, дроссель 62 может управляться для регулирования подачи всасываемого воздуха в камеру 30 сгорания среди прочих цилиндров двигателя. Контроллер 12 может получать информацию о положении дроссельной заслонки 64 в виде сигнала положения дросселя ПД (TP). Впускной канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для направления сигналов МРВ (MAF) и ДВК (MAP) в контроллер 12. В одном варианте осуществления впускной канал 42 может дополнительно содержать датчик 121 влажности для измерения влажности окружающей среды. В другом варианте датчик 121 влажности можно дополнительно или в качестве альтернативы установить в выпускном канале 48.
Система 88 зажигания может подавать искру зажигания в камеру 30 сгорания с помощью свечи 92 зажигания по сигналу опережения зажигания ОЗ (SA) от контроллера 12 в определенных режимах работы. Несмотря на то, что на фигуре показаны компоненты искрового зажигания, в некоторых вариантах камера 30 сгорания, либо одна или несколько других камер сгорания двигателя 10 могут работать в режиме воспламенения от сжатия, с искрой зажигания или без нее.
Датчик 126 отработавших газов (например, датчик кислорода в отработавших газах) показан соединенным с выпускным каналом 48 выше по потоку от устройства 70 снижения токсичности отработавших газов. Датчик 126 может представлять собой датчик любого типа, подходящего для предоставления данных о воздушно-топливном отношении в отработавших газах, например: линейный датчик кислорода или УДКОГ (UEGO) (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или ДКОГ (EGO), НДКОГ (HEGO) (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. В другом варианте осуществления двигатель может содержать дополнительный датчик отработавших газов, то есть в общей сложности два датчика отработавших газов, при этом оба датчика располагают выше по потоку от устройства 70 снижения токсичности отработавших газов (например, выше по потоку от всех без исключения каталитических нейтрализаторов системы двигателя). Например, датчик 126 отработавших газов может представлять собой датчик воздушно-топливного отношения, а второй датчик отработавших газов может быть предназначен специально для определения давления отработавших газов двигателя, а не для определения воздушно-топливного отношения.
Устройство 70 снижения токсичности отработавших газов показано установленным вдоль выпускного канала 48 ниже по потоку от датчика 126 отработавших газов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор ТКН (TWC), накопитель оксидов азота, устройство снижения токсичности отработавших газов какого-либо иного типа или их комбинацию. В некоторых вариантах осуществления во время работы двигателя 10 устройство 70 снижения токсичности отработавших газов можно периодически возвращать к изначальным установкам, подавая в как минимум один из цилиндров двигателя смесь с определенным воздушно-топливным отношением.
Кроме того, в раскрываемых вариантах осуществления система рециркуляции отработавших газов РОГ (EGR) может направлять необходимое количество отработавших газов из выпускного канала 48 во впускной коллектор 44 по магистрали 140 РОГ. Величину подачи отработавших газов рециркуляции во впускной коллектор 44 может регулировать контроллер 12 с помощью клапана 142 РОГ. Кроме того, датчик 144 РОГ можно установить в магистрали РОГ и использовать для получения одного или нескольких из следующих показаний: давления, температуры и концентрации отработавших газов. В определенных условиях, систему РОГ можно использовать для регулирования температуры топливовоздушной смеси внутри камеры сгорания, обеспечивая, таким образом, способ регулирования момента зажигания в некоторых режимах сжигания топлива. Кроме того, при некоторых условиях часть газообразных продуктов сгорания можно удерживать в камере сгорания, изменяя фазы газораспределения выпускных клапанов, например, путем регулирования механизма изменения фаз газораспределения.
Контроллер 12 показан на ФИГ. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронную среду хранения выполняемых программ и калибровочных значений, в данном примере показанную в виде однокристального постоянного запоминающего устройства 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от соединенных с двигателем 10 датчиков, среди которых: измерение массового расхода всасываемого воздуха (МРВ) от датчика 120 массового расхода воздуха; показание температуры хладагента двигателя ТХД (ЕСТ) от датчика 112 температуры, соединенного с рубашкой 114 охлаждения двигателя; сигнал профиля зажигания ПЗ (PIP) от датчика 118 на эффекте Холла (или датчика иного типа), соединенного с коленчатым валом 40; положения дросселя (ПД) от датчика положения дросселя; и сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя (оборотов в минуту) может быть сгенерирован контроллером 12 из сигнала ПЗ.
В носитель информации - постоянное запоминающее устройство 106 - могут быть введены машиночитаемые данные, представляющие собой команды, исполняемые микропроцессором 102 для выполнения раскрытых в настоящей заявке способов, а также других предполагаемых, но конкретно не перечисленных вариантов.
Как раскрыто выше, на ФИГ. 1 показан только один цилиндр многоцилиндрового двигателя, при этом каждый его цилиндр может также содержать собственный комплект впускных/выпускных клапанов, топливную форсунку, свечу зажигания и т.п.
Далее, на ФИГ. 2 схематически изображен пример осуществления УДКОГ 200, выполненного с возможностью измерять концентрацию кислорода (O2) в потоке отработавших газов. Датчик 200 может функционировать как, например, УДКОГ 126 на ФИГ. 1. Датчик 200 содержит несколько слоев одного или нескольких керамических материалов, расположенных друг над другом. В варианте на ФИГ. 2 показаны пять керамических слоев в виде слоев 201, 202, 203, 204 и 205. Эти слои включают в себя один или несколько слоев твердого электролита с кислородно-ионной проводимостью. Примеры подходящих твердых электролитов, включают в себя, помимо прочих, материалы на основе окиси циркония. Кроме того, в некоторых вариантах может быть установлен нагреватель 207, находящийся в тепловом контакте с указанными слоями для увеличения их ионной проводимости. Несмотря на то, что изображенный УДКОГ сформирован из пяти керамических слоев, следует понимать, что УДКОГ может содержать любое подходящее количество керамических слоев.
Слой 202 содержит материал или материалы, создающие диффузионный путь 210. Диффузионной путь 210 выполнен с возможностью направлять отработавшие газы в первую внутреннюю полость 222 за счет диффузии. Диффузионный путь 210 может быть выполнен с возможностью пропускать один или несколько компонентов отработавших газов, включая, помимо прочих, необходимый анализируемый компонент (например, O2), для диффузии во внутреннюю полость 222 с интенсивностью, ограниченной по сравнению с той, с которой анализируемый компонент могут накачивать внутрь или выкачивать наружу пара электродов 212 и 214 накачки. Таким образом, в первой внутренней полости 222 можно получить стехиометрическое содержание O2.
Датчик 200 также содержит вторую внутреннюю полость 224 в пределах слоя 204, отделенную от первой внутренней полости 222 слоем 203. Вторая внутренняя полость 224 выполнена с возможностью поддержания постоянного парциального давления кислорода, соответствующего стехиометрическому составу смеси, например, содержание кислорода во второй внутренней полости 224 равно тому, которое присутствовало бы в отработавших газах, если бы воздушно-топливное отношение было стехиометрическим. Концентрацию кислорода во второй внутренней полости 224 поддерживают постоянной с помощью напряжения накачки Vcp. Поэтому вторую внутреннюю полость 224 можно рассматривать как эталонную ячейку.
Пара измерительных электродов 216 и 218 расположена с возможностью связи с первой внутренней полостью 222 и эталонной ячейкой 224. Пара измерительных электродов 216 и 218 обнаруживает градиент концентрации, который может образоваться между первой внутренней полостью 222 и эталонной ячейкой 224 из-за того, что концентрация кислорода в отработавших газах превышает стехиометрический уровень или находится ниже его. Причиной высокой концентрации кислорода может быть бедный состав отработавших газов, а низкой концентрации кислорода - богатый состав отработавших газов.
Пара электродов 212 и 214 накачки расположена с возможностью связи с внутренней полостью 222 и выполнена с возможностью выкачивать электрохимическим способом выбранный компонент газа (например, O2) из внутренней полости 222 через слой 201 и за пределы датчика 200. В другом варианте пара электродов 212 и 214 накачки могут быть выполнены с возможностью накачивать электрохимическим способом выбранный газ через слой 201 во внутреннюю полость 222. В этом случае, пара электродов накачки 212 и 214 может рассматриваться как элемент накачки O2.
Электроды 212, 214, 216 и 218 можно выполнять из различных подходящих материалов. В некоторых вариантах электроды 212, 214, 216 и 218 могут быть выполнены как минимум частично из материала, катализирующего диссоциацию молекулярного кислорода. Неограничивающими примерами таких материалов могут служить электроды, содержащие платину и (или) серебро.
Процесс электрохимической накачки кислорода из внутренней полости 222 или в нее включает в себя подачу напряжения Vp (например, опорного напряжения) на пару электродов 212 и 214 накачки. Напряжение накачки Vp, поданное на элемент накачки O2, накачивает кислород в первую внутреннюю полость 222 или выкачивает кислород из нее для поддержания стехиометрического уровня кислорода в полости ячейки накачки. Возникающий при этом ток накачки Ip пропорционален концентрации кислорода в отработавших газах. Система управления (не показана на ФИГ. 2) формирует сигнал тока накачки Ip в зависимости от величины подаваемого напряжения накачки Vp, необходимой для поддержания стехиометрического уровня в первой внутренней полости 222. Таким образом, если смесь является бедной, то кислород будет выкачиваться из внутренней полости 222, а если смесь является богатой, то кислород будет закачиваться во внутреннюю полость 222.
Следует понимать, что УДКОГ, раскрытый в настоящей заявке, является не более чем примером осуществления УДКОГ, и то, что другие варианты осуществления УДКОГ могут иметь дополнительные и (или) другие признаки и (или) конструктивные исполнения.
Таким образом, датчик кислорода на ФИГ. 2 может представлять собой датчик кислорода с переменным напряжением, выполненный с возможностью работы при напряжении (например, опорном напряжении) первой, более низкой, величины, когда диссоциация молекул воды не происходит, и при напряжении (например, опорном напряжении) второй, более высокой, величины, когда происходит полная диссоциация молекул воды. При этом напряжение второй величины выше напряжения первой величины.
Как более подробно раскрыто ниже, УДКОГ, изображенный на ФИГ. 2, можно с успехом использовать для оценки давления отработавших газов, протекающих по выпускному каналу двигателя, в области выше по потоку от каталитического нейтрализатора (например, выше по потоку от системы нейтрализации отработавших газов, содержащей один или несколько каталитических нейтрализаторов), а также влажности окружающей среды. А именно, изменение выходного сигнала тока накачки (разность Ip) датчика при двух разных величинах опорного напряжения используют для определения количества кислорода, образующегося при диссоциации воды и (или) CO2. В другом примере результат сравнения двух выходных сигналов тока накачки, формируемых датчиком в два разных момента времени, но при одном и том же более высоком опорном напряжении второй величины, можно использовать для определения давления отработавших газов двигателя.
В другом примере датчик кислорода в отработавших газах (например, УДКОГ на ФИГ. 2 и (или) датчик 126 отработавших газов на ФИГ. 1) может функционировать как традиционный датчик кислорода (например, датчик контроля воздушно-топливного отношения), при опорном напряжении более низкой первой величины (например, около 450 мВ). Данное более низкое напряжение в настоящем описании может именоваться «базовое опорное напряжение». Иначе говоря, УДКОГ можно использовать как датчик контроля воздушно-топливного отношения для определения воздушно-топливного отношения в отработавших газах. В некоторых примерах на основе полученного значения воздушно-топливного отношения можно затем оценить содержание этанола в сожженном в двигателе топливе (например, оцененное значение EtOH).
Таким образом, датчик отработавших газов (например, датчик кислорода в отработавших газах) можно использовать для предоставления данных о различных составляющих отработавших газов. При определенных условиях датчик отработавших газов может эксплуатироваться в режиме переменного напряжения (ПН). Как раскрыто выше, во время работы в режиме ПН опорное напряжение датчика отработавших газов повышают с более низкого базового напряжения (например, около 450 мВ, в настоящем описании также именуемого «номинальный режим») до более высокого целевого напряжения (например, в пределах 900-1100 мВ). В некоторых примерах указанное более высокое целевое напряжение может представлять собой напряжение, при котором молекулы воды частично или полностью диссоциируют в датчике кислорода, а базовое напряжение представляет собой напряжение, при котором молекулы воды не диссоциируют в датчике.
Авторы настоящего изобретения выявили наличие у датчиков отработавших газов характерной зависимости от давления. Поскольку давление меняет способность кислорода проникать через диффузионный барьер датчика, изменения давления (например, изменения давления отработавших газов) в среде, в которой расположен датчик (например, отработавшие газы в выходном канале), могут отражаться в выходном сигнале тока накачки датчика. В номинальных условиях Vs (например, когда датчик работает при более низком, базовом, напряжении), датчик кислорода в отработавших газах может генерировать ток накачки, величина которого примерно равна нулю, или воздушно-топливное отношение, приблизительно равное единице. В режиме ПН, когда датчик эксплуатируется при более высоком напряжении второй величины, измеренные значения тока накачки могут значительно превышать ноль в связи с диссоциацией воды в отработавших газах при более высоком опорном напряжении. Это может обеспечить повышенную чувствительность для обнаружения изменений давления отработавших газов, поскольку изменения тока накачки, отражающие изменения давления отработавших газов, могут быть более выраженными при эксплуатировании датчика при более высоком опорном напряжении, чем при более низком, базовом, напряжении. Поэтому изменения давления отработавших газов могут основываться на изменении выходного сигнала тока накачки датчика кислорода в отработавших газах между двумя разными замерами (например, в два разных момента времени), когда датчик кислорода работает при одном и том же более высоком целевом опорном напряжении, а воздушно-топливное отношение контролируют и удерживают на одном уровне во время обоих замеров. Разность тока накачки между двумя замерами при одних и тех же опорном напряжении и воздушно-топливном отношении можно затем преобразовать в значение изменения давления отработавших газов, используя переводной коэффициент. Изменение давления отработавших газов, определенное по выходным сигналам датчика кислорода, можно использовать для регулирования работы двигателя. Дополнительно или в качестве альтернативы изменение давления отработавших газов, определенное по выходным сигналам датчика кислорода, можно использовать для подтверждения, корректировки или замены значения давления отработавших газов, определенного по модели давления отработавших газов. Например, модель давления отработавших газов может оценивать давление отработавших газов по дополнительным условиям работы двигателя (отличным от выходных сигналов датчика кислорода). Однако, как разъяснялось выше, точность смоделированных значений давления отработавших газов может быть ниже, чем у результатов оценки с помощью датчика кислорода, особенно тогда, когда условия работы двигателя выходят за пределы заданного диапазона (например, заданных условий работы двигателя) для моделирования давления отработавших газов с использованием выбранных условий работы двигателя. Ошибки в смоделированном давлении отработавших газов могут оказывать каскадный эффект на другие модели и (или) алгоритмы управления двигателем, использующие указанное смоделированное значение давления отработавших газов в качестве входного параметра, в результате чего снижается точность управления двигателем. Определяя давление отработавших газов по выходным сигналам датчика кислорода в отработавших газах, как раскрыто выше и как будет более детально описано ниже, можно повысить точность оценки давления отработавших газов и, тем самым, точность управления двигателем.
Системы на ФИГ. 1-2 представляют собой систему, содержащую: датчик кислорода в отработавших газах, расположенный в выпускном канале двигателя выше по потоку от каталитического нейтрализатора; и контроллер с машиночитаемыми командами для: регулирования работы двигателя в зависимости от давления отработавших газов, протекающих по выпускному каналу, причем давление отработавших газов оценивают по первому выходному сигналу датчика кислорода в отработавших газах во время работы датчика кислорода в отработавших газах в режиме переменного напряжения, причем опорное напряжение указанного датчика находится на уровне целевого напряжения, при котором диссоциируют молекулы воды, и во время работы двигателя при первом воздушно-топливном отношении, и по второму выходному сигналу датчика кислорода в отработавших газах, полученного по прошествии некоего интервала после первого выходного сигнала, во время работы датчика кислорода в отработавших газах при целевом напряжении и работы двигателя при первом воздушно-топливном отношении. В одном примере в основе указанного интервала лежит время между формированием первого выходного сигнала и получением контроллером запроса оценки давления отработавших газов, причем указанный запрос выдают при соблюдении одного или нескольких из следующих условий: датчик кислорода в отработавших газах работает при целевом напряжении, двигатель работает за пределами диапазона обновления для модели давления отработавших газов, основанной на меняющихся параметрах работы двигателя, и наличие запроса для подтверждения смоделированного значения давления отработавших газов, определенного по указанной модели давления отработавших газов.
Обратимся к ФИГ. 3, на которой представлен способ 300 для регулирования работы двигателя в зависимости от смоделированного или оцененного (например, оцененного по выходным сигналам датчика кислорода) давления отработавших газов. Давление отработавших газов может представлять собой давление отработавших газов, протекающих по выпускному каналу двигателя. В одном примере давление отработавших газов можно смоделировать, используя модель давления отработавших газов, в основе которой лежат условия работы двигателя, за исключением выходных сигналов датчика кислорода. В другом примере давление отработавших газов можно оценить по показаниям единственного датчика, например, датчика кислорода в отработавших газах (например, датчика 156 и (или) 200 отработавших газов на ФИГ. 1-2). Способ 300 и другие раскрытые в настоящей заявке способы может выполнять контроллер, например, контроллер 12 на ФИГ. 1, в соответствии с командами, хранящимися в запоминающем устройстве контроллера.
Выполнение способа 300 начинают на шаге 302, оценивая и (или) измеряя условия работы двигателя. Условия работы двигателя могут включать в себя нагрузку двигателя, уровень наддува, частоту вращения двигателя, воздушно-топливное отношение отработавших газов, температуру двигателя, влажность окружающей среды, давление окружающей среды, массовый расход воздуха, расход РОГ, давление на впуске и т.п. На шаге 304 способ предусматривает проверку того, находятся ли выбранные условия работы двигателя в пределах диапазона для моделирования давления отработавших газов. В одном примере давление отработавших газов оценивают с помощью модели давления отработавших газов, использующей заданный набор условий работы двигателя в качестве входных параметров. Например, давление отработавших газов можно смоделировать по расходу отработавших газов. В другом примере давление отработавших газов можно смоделировать в зависимости от компоновки (например, расположения и структуры компонентов) двигателя и изменений одного или нескольких параметров работы двигателя. Например, компоновка двигателя может включать в себя конструктивное исполнение, местоположение и (или) размер одного или нескольких каталитических нейтрализаторов, регулирующего клапана продувки РКП (PCV) и системы рециркуляции отработавших газов (РОГ). Тип системы РОГ (например, высокого давления или низкого давления) также может оказывать влияние и учитываться в модели давления отработавших газов. Модель давления отработавших газов также может учитывать наличие или отсутствие у двигателя фильтра твердых частиц (а также его размер, местоположение и конструктивное исполнение), а также способ или систему, используемые для его регенерации. Указанное одно или несколько меняющихся условий работы двигателя, используемые в качестве входных параметров модели давления отработавших газов, могут включать в себя частоту вращения двигателя (например, число оборотов в минуту), скорость транспортного средства, нагрузку двигателя, температуру всасываемого воздуха, выведенное значение барометрического давления, влажность, температуру каталитического нейтрализатора, абсолютное давление воздуха в коллекторе (ДВК), и (или) положение дросселя. Таким образом, в основе модели давления отработавших газов могут лежать структура компонентов двигателя и одно или несколько условий работы двигателя, за исключением выходных сигналов датчика кислорода в отработавших газах. Однако давление отработавших газов можно определять по указанной модели только тогда, когда выбранные условия работы двигателя находятся в пределах пороговых диапазонов, и (или) когда соблюдены определенные условия работы. Например, при некоторых условиях работы точность модели давления отработавших газов может снизиться, что может привести ухудшению управления двигателем.
Если условия работы двигателя для моделирования давления отработавших газов выходят за пределы заданного диапазона, способ переходит к шагу 306 для определения второго значения давления отработавших газов (например, второго оцененного значения давления отработавших газов) по выходным сигналам датчика кислорода в отработавших газах. Например, в основе второго оцененного значения давления отработавших газов, полученного на шаге 306, могут лежать показания датчика кислорода, а не модель давления отработавших газов. В одном примере датчик кислорода в отработавших газах может представлять собой специализированный датчик для оценки давления отработавших газов. В другом примере датчик кислорода в отработавших газах можно использовать для определения как давления отработавших газов, так и воздушно-топливного отношения отработавших газов. Выполнение способа на шаге 306 более подробно раскрыто со ссылкой на ФИГ. 4А-4В. Определив второе значение давления отработавших газов с помощью датчика кислорода в отработавших газах, способ переходит к шагу 308 для регулирования работы двигателя в зависимости от второго значения давления отработавших газов. В одном примере контроллер двигателя может использовать второе значение давления отработавших газов в качестве входного параметра дополнительных алгоритмов управления и моделей рабочих параметров. В другом примере регулирование работы двигателя в зависимости от второго значения давления отработавших газов может предусматривать регулирование одного или нескольких из следующих параметров: подачи топлива в двигатель, заряда воздуха в двигателе, наддува двигателя (например, работы турбокомпрессора), регенерации фильтра твердых частиц и т.п.
В противном случае, если на шаге 304 условия работы двигателя для моделирования давления отработавших газов находятся в пределах заданного диапазона, способ переходит к шагу 310 для определения первого значения давления отработавших газов (например, первого оцененного значения давления отработавших газов), используя модель давления отработавших газов, в основе которой лежат меняющиеся условия работы двигателя. Например, первое значение давления отработавших газов можно моделировать по расходу отработавших газов. В другом примере, как раскрыто выше, первое значение давления отработавших газов можно моделировать в зависимости от структуры двигателя (например, наличия, размера и местоположения таких компонентов двигателя, как глушитель, каталитический нейтрализатор, РКП, система РОГ и т.п.) и одного или нескольких условий работы двигателя (например, частоты вращения двигателя, скорости транспортного средства, нагрузки двигателя, температуры всасываемого воздуха, выведенного значения барометрического давления, влажности, температуры каталитического нейтрализатора, абсолютного давления воздуха в коллекторе (ДВК), и (или) положения дросселя). Таким образом, в основе первой модели давления отработавших газов могут лежать структура компонентов двигателя и одно или несколько условий работы двигателя, за исключением выходных сигналов датчика кислорода в отработавших газах. Затем способ переходит к шагу 312 для проверки наличия запроса на подтверждение первого значения давления отработавших газов. В некоторых примерах смоделированное первое значение давления отработавших газов может требовать подтверждения всегда. В другом примере смоделированное первое значение давления отработавших газов может требовать подтверждения только при определенных условиях работы двигателя, или при наличии оцененного второго значения давления отработавших газов (полученного с помощью датчика кислорода в отработавших газах) для текущих условий работы. Если подтверждение не требуется и (или) не запрошено, способ переходит к шагу 320 для регулирования работы двигателя (как раскрыто выше на шаге 308) в зависимости от первого значения давления отработавших газов (например, смоделированного значения), а не от второго значения давления отработавших газов (например, оцененного значения по выходным сигналам датчика кислорода).
В качестве альтернативы, если подтверждение первого значения давления отработавших газов необходимо, способ переходит к шагу 314 для определения второго значения давления отработавших газов по выходным сигналам датчика кислорода в отработавших газах. Способа на шаге 314 может быть тем же, что и на шаге 306, и будет более подробно раскрыт ниже со ссылкой на ФИГ. 4А-4В. Способ 300 переходит к шагу 316 для проверки того, превышает ли первое значение давления отработавших газов пороговый предел второго значения давления отработавших газов (например, разность первого и второго значений давления отработавших газов ниже пороговой). Если первое и второе значения давления отработавших газов не превышают пороговых пределов друг друга, способ переходит к шагу 318, на котором контроллер может отрегулировать работу двигателя в зависимости либо от первого, либо от второго значения давления отработавших газов. В противном случае, если первое и второе значения давления отработавших газов выходят за пороговые пределы друг друга, способ переходит к шагу 308 для регулирования работы двигателя в зависимости от второго, а не первого, значения давления отработавших газов. Таким образом, при управлении двигателем можно использовать второе оцененное значение давления отработавших газов вместо традиционного смоделированного первого оцененного значения давления отработавших газов. В других вариантах осуществления, если первое и второе значения давления отработавших газов выходят за пороговые пределы друг друга, способ может предусматривать коррекцию первого значения давления отработавших газов по второму значению давления отработавших газов.
Перейдем к ФИГ. 4А-4В, на которых представлен способ 400 для оценки давления отработавших газов в двигателе с помощью датчика кислорода в отработавших газах с переменным напряжением (ПН). Датчик кислорода в отработавших газах с ПН (например, датчики 156 и (или) 200 отработавших газов на ФИГ. 1-2) может быть расположен в выпускном канале двигателя ниже по потоку от двигателя и выше по потоку от каталитического нейтрализатора. Как раскрыто выше, с помощью датчика кислорода в отработавших газах можно оценивать давление отработавших газов, протекающих по выпускному каналу, более точно, чем по модели давления отработавших газов. В одном примере контроллер, например, контроллер 12 на ФИГ. 1, может выполнять способ 400 для определения давления отработавших газов с помощью датчика кислорода в отработавших газах с ПН во время выполнения способа 300, когда условия для моделирования давления отработавших газов не соблюдаются. В другом примере контроллер может выполнять способ 400 для оценки давления отработавших газов с помощью датчика кислорода в отработавших газах с ПН всякий раз при соблюдении условий для работы датчика кислорода в режиме ПН. Следовательно, давление отработавших газов можно оценивать с помощью датчика кислорода постоянно при соблюдении выбранных условий для работы датчика, а не только когда точность модели давления отработавших газов может быть снижена (как раскрыто выше со ссылкой на ФИГ. 3). Способ 400 может дополнительно предусматривать определение влажности окружающей среды и последующее сохранение указанного значения влажности окружающей среды в запоминающем устройстве контроллера.
Выполнение способа 400 начинают на шаге 402, оценивая и (или) измеряя условия работы двигателя. В качестве неограничивающего примера, условия работы двигателя могут включать в себя воздушно-топливное отношение (например, ВТО), величину подачи РОГ в камеры сгорания и условия подачи топлива.
Определив условия работы двигателя, способ 400 переходит к шагу 404 для определения того, находится ли двигатель в условиях без подачи топлива. Условия без подачи топлива включают в себя условия замедления транспортного средства и условия работы двигателя, в которых подача топлива прервана, но двигатель продолжает вращаться, и как минимум один впускной клапан и один выпускной клапан работают; таким образом, воздух протекает через один или несколько цилиндров, но топливо в цилиндры не впрыскивают. В условиях без подачи топлива сгорание не осуществляется, и наружный воздух может протекать через цилиндр из впускной системы в выпускную систему. В этом случае, на датчик, например, УДКОГ (датчик кислорода в отработавших газах), может поступить наружный воздух, для которого можно выполнять измерения, например, определять влажность окружающей среды.
Как сказано выше, условия без подачи топлива могут предусматривать, например, отсечку топлива в режиме замедления ОТРЗ (DFSO). ОТРЗ происходит в случае изменения положения педали водителем (например, когда водитель резко отпускает педаль акселератора, а разгон транспортного средства превышает пороговое значение). ОТРЗ может происходить неоднократно за время цикла езды, поэтому за цикл езды можно получить несколько показаний влажности окружающей среды, например, во время каждого события ОТРЗ. Таким образом, можно точно определять тип топлива по водосодержанию отработавших газов, невзирая на изменения влажности от цикла к циклу езды или даже в пределах одного и того же цикла езды.
Вернемся к ФИГ. 4А-4В: если устанавливается, что двигатель находится в условиях без подачи топлива, например, в условиях ОТРЗ, алгоритм 400 переходит к шагу 406 для определения влажности окружающей среды, используя способы, представленные на ФИГ. 5, которые будут раскрыты ниже. В одном примере влажность окружающей среды можно определить путем изменения опорного напряжения датчика кислорода в отработавших газах и оценки влажности окружающей среды по изменению тока накачки во время изменения напряжения. В других примерах осуществления влажность окружающей среды можно определять другими способами (не с помощью датчика с ПН, как раскрыто ниже со ссылкой на ФИГ. 5) в условиях с подачей и (или) без подачи топлива.
В противном случае, если устанавливается, что двигатель не находится в условиях без подачи топлива, способ 400 на ФИГ. 4А-4В переходит к шагу 408, на котором контроллер может проверить возможность работы датчика кислорода в отработавших газах в режиме переменного напряжения (например, может ли датчик работать при втором, более высоком, напряжении). Как раскрыто выше, режим ПН предусматривает регулирование опорного напряжения (в настоящем описании также именуемого «напряжение накачки») датчика кислорода с более низкого базового напряжения (например, около 450 мВ) до более высокого (например, 1000-1100 мВ) целевого напряжения, при котором в датчике происходит диссоциация молекул воды. Однако в некоторых условиях, например, когда датчик активно измеряет содержание компонентов газа (например, воздушно-топливное отношение), и (или) продолжительность работы датчика при более высоком целевом напряжении уже превысила пороговую, датчик кислорода в отработавших газах можно эксплуатировать при более низком базовом напряжении (например, напряжении первой величины), а не при более высоком целевом напряжении (например, напряжении второй величины). Если датчик кислорода в отработавших газах не может эксплуатироваться при более высоком напряжении второй величины, способ переходит к шагу 410 для использования датчика кислорода при текущем напряжении (например, первой величины) и определения давления отработавших газов по модели давления отработавших газов, как раскрыто выше со ссылкой на ФИГ. 3.
В противном случае, если на шаге 408 устанавливается, что датчик можно эксплуатировать при более высоком напряжении второй величины, способ переходит к шагу 412 для использования датчика кислорода в отработавших газах при более высоком опорном напряжении второй величины V2 и измерения выходного сигнала тока накачки Ip1, генерируемого датчиком. Например, способ на шаге 412 предусматривает подачу опорного напряжения второй величины V2 на элемент накачки кислорода датчика и получение тока накачки первой величины Ip1. В другом примере способ на шаге 412 может предусматривать повышение опорного напряжения датчика кислорода в отработавших газах с более низкой первой величины V1 до более высокой второй величины V2. Опорное напряжение первой величины может выкачивать кислород из ячейки накачки кислорода, будучи достаточно низким (например, V1 = около 450 мВ) для того, чтобы в ячейке накачки не происходила диссоциация молекул воды (H2O). В некоторых примерах напряжение первой величины может быть тем же, что и напряжение, подаваемое на датчик в режиме работы без ПН. При этом опорное напряжение второй величины может быть выше опорного напряжения первой величины, при этом напряжение второй величины может быть достаточно высоким для диссоциации кислородосодержащих соединений, например, молекул воды. Когда опорное напряжение второй величины подают на элемент накачки кислорода, оно генерирует ток накачки первой величины Ip1. Первая величина тока накачки может отражать количество кислорода и воды в пробе газа (например, кислорода, уже присутствующего в пробе газа) плюс кислород из молекул воды, диссоциированных под действием опорного напряжения второй величины).
На шаге 414 способ может предусматривать сохранение в запоминающем устройстве контроллера первой величины тока накачки Ip1 для текущего значения воздушно-топливного отношения (ВТО) BTO1 и опорного напряжения второй величины V2 (например, 1080 мВ, 1100 мВ и т.п.). Например, на шаге 414 способ может дополнительно предусматривать измерение ВТО во время (либо непосредственно до или после) генерирования тока накачки первой величины Ip1. При использовании одного и того же датчика кислорода в отработавших газах для определения воздушно-топливного отношения отработавших газов и давления отработавших газов, способ на шаге 414 может предусматривать оценку воздушно-топливного отношения с помощью датчика кислорода в отработавших газах в режиме ПН, как показано на ФИГ. 6 и более подробно раскрыто ниже. Иными словами, если датчик кислорода в отработавших газах представляет собой датчик воздушно-топливного отношения, а не специализированный датчик с ПН для определения давления отработавших газов, контроллер может одновременно определять воздушно-топливное отношение отработавших газов и получать ток накачки первой величины для определения давления отработавших газов во время работы при напряжении второй величины V2.
Способ переходит к шагу 416 для корректировки первой величины Ip1 тока накачки по влажности окружающей среды. Например, значение влажности окружающей среды можно вычесть из Ip1, отражающей общее содержание воды (включая влажность) и кислорода в отработавших газах. В одном примере влажность окружающей среды можно определить по выходному сигналу датчика кислорода в отработавших газах в условиях без подачи топлива. В другом примере влажность окружающей среды можно определить одним из других способов в зависимости от условий работы двигателя. Способ на шаге 416 может предусматривает определение влажности окружающей среды на текущий момент или поиск последнего из сохраненных в памяти контроллера оцененных значений влажности окружающей среды. Способ для определения влажности окружающей среды более подробно раскрыт ниже со ссылкой на ФИГ. 5.
Скорректировав Ip1 по влажности окружающей среды, способ переходит к шагу 418 для возврата датчика кислорода в отработавших газах в режим работы при необходимом напряжении (например, Vs). Например, способ на шаге 418 может предусматривать снижение опорного напряжения со второй величины до более низкой первой величины и возврат датчика в режим без ПН. В другом примере способ на шаге 418 может предусматривать продолжение подачи на датчик опорного напряжения второй величины. В еще одном примере способ на шаге 418 может предусматривать изменение опорного напряжения датчика кислорода в отработавших газах от первой до второй величины в течение некоторого времени. В другом примере способ на шаге 418 может предусматривать подачу на датчик опорного напряжения третьей величины, превышающей базовое напряжение первой величины, но отличную от второй величины напряжения (например, выше или ниже второй величины напряжения). Например, напряжение третьей величины может быть достаточно высоким для диссоциации молекул воды на датчике, но отличным от напряжения второй величины. Напряжение и режим работы датчика может основываться на необходимости определения дополнительных компонентов отработавших газов с его помощью. Различные алгоритмы определения параметров работы по выходному сигналу датчика могут требовать работу датчика при других величинах опорного напряжения.
На шаге 420 способ предусматривает определение наличия запроса оцененного значения давления отработавших газов (например, определение того, наступило ли время для оценки давления отработавших газов с помощью датчика кислорода в отработавших газах). В одном примере, и как раскрыто выше со ссылкой на ФИГ. 3, оцененное значение давления отработавших газов с помощью датчика кислорода может быть запрошено, когда выбранные параметры для определения давления отработавших газов по модели давления отработавших газов выходят за пределы диапазона обновления (или за предельные значения для использования указанной модели). В другом примере оцененное значение давления отработавших газов с помощью датчика кислорода может быть запрошено для подтверждения, корректировки и (или) замены смоделированного значения давления отработавших газов, определенного по модели давления отработавших газов. В еще одном примере оцененное значение давления отработавших газов с помощью датчика кислорода может быть запрошено по прошествии заданного интервала (например, по прошествии определенного времени или периода работы двигателя), либо когда датчик работает при более высоком напряжении второй величины независимо от точности модели давления отработавших газов. При отсутствии запроса на определение давления отработавших газов с помощью датчика кислорода в отработавших газах, способ переходит к шагу 422 для продолжения работы датчика при напряжении текущей величины.
В противном случае, при наличии запроса оценки давления отработавших газов с помощью датчика кислорода в отработавших газах, способ переходит к шагу 424 для проверки того, равняется ли измеренное на текущий момент воздушно-топливное отношение воздушно-топливному отношению, определенному на шаге 414 (например, BTO1). Иными словами, способ на шаге 424 предусматривает проверку того, регулируют ли в текущий момент времени воздушно-топливное отношение отработавших газов для поддержания его равным воздушно-топливному отношению на момент замера тока накачки первой величины Ip1. То есть способ на шаге 424 предусматривает проверку того, работает ли двигатель на смеси с тем же соотношением воздуха и топлива на выпуске, что и при выполнении шагов 412-414. Если воздушно-топливное отношение не равно BTO1, способ переходит к шагу 426 для ожидания того момента, когда воздушно-топливное отношение по существу не сравняется с BTO1. В другом варианте осуществления способ на шаге 426 может предусматривать регулирование воздушно-топливного отношения для приведения воздушно-топливного отношения в соответствие с BTO1. Например, контроллер может отрегулировать впрыск топлива таким образом, чтобы воздушно-топливное отношение отработавших газов составило то же значение, что и BTO1 по результатам измерения на шаге 414.
Когда двигатель начинает работать с воздушно-топливным отношением, равным тому, что имело место во время замера Ip1, способ переходит к шагу 428 для эксплуатации датчика кислорода в отработавших газах при опорном напряжении второй величины V2 и измерения тока накачки второй величины Ip2 генерируемого датчиком кислорода. Способ на шаге 428 предусматривает подачу опорного напряжения V2 той же величины, что и напряжение, поданное при замере Ip1 (на шаге 412). Таким образом, напряжение датчика кислорода регулируют для обеспечения одного и того же целевого напряжения второй величины V2 во время обоих измерений Ip1 и Ip2. Так оба значения Ip2 и Ip1 измеряются при одинаковом воздушно-топливном отношении и одинаковом опорном напряжении. На шаге 430 способ предусматривает коррекцию второй величины Ip2 тока накачки по влажности окружающей среды. Способ на шаге 430 может быть тем же, что и на шаге 416, как раскрыто выше.
На шаге 432 способ предусматривает определение изменения давления отработавших газов по разности первой и второй величин Ip1 и Ip2 тока накачки. Если оба значения Ip1 и Ip2 были получены в одинаковых условиях давления отработавших газов, разность Ip (например, разница между указанными двумя результатами измерений) будет нулевой. Однако, если давление отработавших газов изменяется в промежутке времени между замерами (например, между моментом первого замера и моментом второго замера), разность Ip отразит это изменение. Изменение давления отработавших газов можно затем определить, умножив разность первой и второй величины тока накачки (Ip1-Ip2) на переводной коэффициент. Переводной коэффициент может представлять собой коэффициент перевода тока накачки в соответствующее ему значение давления.
Изменение давления отработавших газов, определенное на шаге 432, может представлять собой изменение давления отработавших газов относительно исходного измеренного значения (при этом Ip1 является исходным измеренным значением, a Ip2 представляет собой ток или соответствует последним по времени условиям давления отработавших газов). В другом примере изменение давления отработавших газов, определенное на шаге 432, может представлять собой изменение давления отработавших газов относительно предыдущего измеренного значения (при этом Ip1 представляет собой предыдущий выходной сигнал датчика кислорода, использованный для определения давления отработавших газов). Если давление отработавших газов на момент замера Ip1 известно (например, по показанию другого датчика или известно оцененное значение, например, с помощью моделирования давления отработавших газов, или по результату предыдущего определения Ip1, используя способ 400 и другое значение исходного или предыдущего выходного сигнала тока накачки), можно определить давление отработавших газов (например, давление отработавших газов на текущий момент) во время замера Ip2. Например, способ на шаге 434 может предусматривать определение текущего значения давления отработавших газов по изменению давления отработавших газов, определенному на шаге 432 и известному давлению отработавших газов при Ip1. В одном примере давление отработавших газов при Ip1 можно найти в запоминающем устройстве контроллера в виде значения, ранее сохраненного способом на шаге 412. Определив давление отработавших газов, контроллер может сохранить полученное значение давления отработавших газов и соответствующие ему значения тока накачки, напряжения и ВТО в запоминающем устройстве контроллера для сравнения с последующими выходными сигналами датчика кислорода для определения новых значений давления отработавших газов.
Кроме того, определив давление отработавших газов, контроллер может отрегулировать работу двигателя в зависимости от давления отработавших газов (или изменения давления отработавших газов), как раскрыто выше со ссылкой на ФИГ. 3. Таким образом, способ 400 можно выполнять во время выполнения способа на ФИГ. 3 для определения оцененного значения давления отработавших газов двигателя с помощью датчика кислорода в отработавших газах. Как раскрыто выше, эксплуатация датчика кислорода при более высоком опорном напряжении второй величины может повысить его чувствительность в части обнаружения изменения давления отработавших газов. В результате, точность полученного оцененного значения давления отработавших газов может быть выше, чем при использовании других способов оценки давления отработавших газов (например, моделирования давления по меняющимся условиям работы двигателя). В свою очередь, так можно повысить точность управления двигателем в зависимости от результатов оценки давления отработавших газов. Эксплуатация датчика кислорода при более высоком напряжении второй величины также позволяет определять оцененное значение давления отработавших газов в условиях как с подачей, так и без подачи топлива. Иными словами, способ 400 можно осуществлять в условиях как с подачей, так и без подачи топлива, например, во время ОТРЗ. Так можно расширить диапазон работы двигателя (например, увеличить число условий работы), для которого можно оценивать давление отработавших газов.
Обратимся к ФИГ. 5, на которой представлен способ 500 для оценки влажности окружающей среды с помощью датчика кислорода в отработавших газах с переменным напряжением (например, датчиков 126 и 200 содержания кислорода в отработавших газах на ФИГ. 1 и ФИГ. 2 соответственно). Выполнение способа начинают на шаге 502, проверяя, настало ли время для оценки влажности окружающей среды. В одном примере к выполнению способа 500 можно перейти с шага 406 способа 400, как раскрыто выше. Так, если двигатель работает в условиях без подачи топлива, способ может перейти на шаг 504. В другом примере способ 500 можно выполнять по прошествии определенного интервала, представляющего собой, например, период работы двигателя, количество рабочих циклов двигателя, продолжительность езды транспортного средства или расстояние, пройденное транспортным средством. В другом примере способ 500 можно выполнять сразу после запуска двигателя. Если время для оценки влажности окружающей среды не наступило, способ переходит на шаг 503, где влажность окружающей среды не оценивают, а выполнение способа завершают. Если запрос на измерение влажности окружающей среды выдан другим алгоритмом управления, то контроллер может найти предыдущее сохраненное значение влажности окружающей среды.
На шаге 504 способ предусматривает проверку того, предстоит ли в ближайшее время переключение передач. Предстоящее переключение передач можно прогнозировать по одному или нескольким из следующих признаков: установлен или нет флаг запроса переключения, по отслеживанию положения одной или нескольких педалей и (или) ускорению транспортного средства. Во время переключения передач после вхождения в условия без подачи топлива (например, отсечки топлива в режиме замедления), определение влажности с помощью датчика кислорода в отработавших газах может оказаться невозможным из-за необходимости снижения нагрузки во время переключения передач (а определение влажности с помощью датчика кислорода в отработавших газах может предусматривать открытие дросселя для уменьшения помех, вызванных ПВК). Таким образом, если на шаге 504 прогнозируют переключение передач, то способ переходит на шаг 506 для определения влажности окружающей среды другим способом. В одном примере указанный другой способ может предусматривать измерение влажности с помощью специализированного датчика влажности (если двигатель содержит датчик влажности). Указанный другой способ может дополнительно предусматривать определение соответствующего значения тока накачки Ip датчика кислорода по измеренному значению влажности и текущему заданному значению напряжения датчика кислорода в отработавших газах, используемого для определения давления отработавших газов, как раскрыто на ФИГ. 4А-4В. В другом примере указанный другой способ для определения влажности может предусматривать оценку влажности окружающей среды по температуре окружающей среды. Например, влажность окружающей среды можно оценить по температуре наружного воздуха и давлению насыщения пара, определенному, исходя их предполагаемой относительной влажности 50%. Соответствующую величину тока накачки можно определить по полученному оцененному значению влажности.
В противном случае, если на шаге 504 не прогнозируют предстоящее переключение передач, способ переходит к шагу 508 для открытия впускного дросселя (например, дросселя 62 на ФИГ. 1) для дальнейшего снижения количества углеводородов, протекающих мимо датчика кислорода в отработавших газах (например, датчиков 126 на ФИГ. 1 и (или) 200 на ФИГ. 2). Например, открыв дроссель, можно снизить количество углеводородов из ПВК, проходящих через выпускную систему в потоке воздуха. А именно, если впускной дроссель закрыт в условиях без подачи топлива в двигатель, возникает сильное разрежение во впускном коллекторе, в связи с чем возможно втягивание углеводородов из потока принудительной вентиляции картера (ПВК). Даже если отверстие ПВК закрыто во время ОТРЗ, разрежение может быть достаточно сильным для втягивания углеводородов из потока ПВК через поршневые кольца. Проблема втягивания потока ПВК может обостриться в изношенном двигателе из-за просачивания газов ПВК через поршневые кольца и клапаны. Поступившие углеводороды могут отрицательно повлиять на показания датчика кислорода в отработавших газах и исказить результаты измерения влажности. В частности, под воздействием углеводородов результат оценки влажности окружающей среды с помощью датчика оказывается завышенным.
На шаге 510 способ предусматривает принятие решение о том, следует ли использовать датчик кислорода в отработавших газах в режиме переменного напряжения (ПН). Как раскрыто выше, режим ПН предусматривает изменение опорного напряжения (в настоящем описании также именуемого «напряжение накачки») датчика кислорода с более низкого базового напряжения (например, около 450 мВ) до более высокого целевого напряжения, при котором на датчике происходит диссоциация молекул воды. В некоторых примерах работа в режиме ПН может предусматривать постоянное изменение опорного напряжения от базового напряжения (например, напряжения первой величины) до целевого напряжения (например, напряжения второй величины). В некоторых примерах постоянная эксплуатация датчика кислорода в режиме ПН и, в частности, при более высоком напряжении второй величины, может со временем привести к ухудшению характеристик датчика. Поэтому может быть целесообразно сократить продолжительность работы датчика в режиме ПН. В одном примере датчик можно эксплуатировать в режиме ПН только по прошествии определенного времени с предыдущего периода его работы в режиме ПН. В другом примере датчик можно эксплуатировать в режиме ПН, только если общая продолжительность режима ПН за некий период эксплуатации двигателя не превышает верхний пороговый уровень. В еще одном примере датчик можно использовать в режиме ПН по окончании определенного интервала (например, количества времени) после предыдущего измерения. Кроме того, датчик можно выключить, если со времени выполнения измерения прошло общее пороговое количество времени. В другом варианте постоянная эксплуатация датчика кислорода при более высоком напряжении второй величины может не приводить к ухудшению характеристик датчика, если состав газов и напряжение второй величины находятся в пределах определенных пороговых диапазонов, снижающих интенсивность ухудшения характеристик. В рассматриваемом варианте, если состав газа и напряжение второй величины датчика поддерживают в соответствующих пороговых диапазонах, датчик может по умолчанию работать в режиме ПН, и способ может перейти на шаг 512.
Если контроллер установит, что датчик кислорода в отработавших газах можно эксплуатировать в режиме ПН, способ переходит к шагу 512 для изменения опорного напряжения датчика кислорода в отработавших газах от напряжения первой величины (V1) до напряжения второй величины (V2). Например, способ на шаге 512 предусматривает: сначала, на шаге 514, подачу напряжения первой величины (V1) на элемент накачки кислорода датчика отработавших газов и получение тока накачки первой величины (Ip1). Первая величина опорного напряжения может быть такой, чтобы выкачивать кислород из ячейки, будучи при этом достаточно низкой (например, V1 = около 450 мВ) для того, чтобы не происходила диссоциация кислородсодержащих соединений, например, H2O (воды). При подаче напряжения первой величины датчик формирует выходной сигнал в виде тока накачки первой величины (Ip1), отражающего количество кислорода в пробе газа. В данном примере, поскольку топливо в двигатель не подают, это количество кислорода может соответствовать количеству кислорода в наружном воздухе, окружающем транспортное средство. Способ на шаге 512 также предусматривает, на шаге 516, подачу напряжения второй величины (V2) на элемент накачки кислорода датчика и получение тока накачки второй величины (Ip2). Напряжение второй величины может быть выше напряжения первой величины, подаваемого на датчик. А именно, напряжение второй величины может быть достаточно высоким для диссоциации необходимого кислородсодержащего соединения. Например, напряжение второй величины может быть достаточно высоким для диссоциации молекул H2O на водород и кислород (например, V2 = около 1.1 V). При подаче напряжения второй величины возникает ток накачки второй величины (12), отражающей количество кислорода и воды в пробе газа. Следует понимать, что термин «вода» в выражении «количество кислорода и воды» в контексте настоящего описания относится к количеству кислорода из диссоциированных молекул H2O в пробе газа.
Влажность окружающей среды (например, абсолютную влажность наружного воздуха, окружающего транспортное средство) можно определить на шаге 518 алгоритма 500 по первой величине тока накачки и второй величине тока накачки (или скорректированным первой и второй величинам тока накачки). Например, первую величину тока накачки можно вычесть из второй величины тока накачки, чтобы получить значение изменения тока накачки, отражающее количество кислорода из диссоциированных молекул воды (например, количество воды) в пробе газа. Данное значение может быть пропорционально влажности окружающей среды. Значение влажности окружающей среды можно использовать для корректировки выходных сигналов тока накачки на шагах 416 и 430 способа 400 и (или) сохранить в запоминающем устройстве контроллера. В других примерах можно регулировать работу двигателя в зависимости от полученного значения влажности окружающей среды.
Возвращаемся к шагу 510, если работа датчика кислорода в отработавших газах в режиме ПН нежелательна, способ взамен может предусматривать определение влажности окружающей среды по выходному сигналу датчика кислорода в отработавших газах при напряжении первой величины и значению тока накачки сухого воздуха. А именно, способ на шаге 520 предусматривает определение тока накачки сухого воздуха. Например, способ может предусматривать эксплуатацию датчика кислорода в отработавших газах при напряжении первой, более низкой, величины для получения первого выходного сигнала, указывающего содержание кислорода во влажном воздухе. Затем на датчик можно подать напряжение второй, более высокой, величины для получения второго выходного сигнала, указывающего содержание кислорода во влажном воздухе, при этом вся влага в воздухе диссоциировала в датчике кислорода. При напряжении средней величины между первой, более низкой, и второй, более высокой, величинами, датчик кислорода может выдать сигнал, указывающий содержание кислорода в сухом воздухе, когда происходит частичная диссоциация влаги. Затем содержание кислорода в сухом воздухе можно оценить с помощью соотношения между первым и вторым выходными сигналами. Так можно определить содержание кислорода в сухом воздухе, используя датчик кислорода в режиме ПН. На шаге 520 контроллер может найти последнее по времени из сохраненных значений тока накачки, соответствующее сухому воздуху, для использования на шаге 520.
Способ переходит к шагу 522 для подачи первого, более низкого, опорного напряжения (например, базового напряжения V1) на датчик кислорода в отработавших газах и получения тока накачки (IpB). Таким образом, способ на шаге 522 предусматривает неиспользование датчика кислорода в режиме ПН, а поддержание опорного напряжения датчика на более низком, базовом, уровне, снижающем интенсивность ухудшения характеристик датчика кислорода. Иначе говоря, способ на шаге 522 не предусматривает изменение опорного напряжения датчика кислорода от более низкого напряжения первой величины до более высокого напряжения второй величины. Значение возникающего тока накачки может отражать содержание кислорода в пробе газа.
Затем алгоритм переходит к шагу 524 для определения влажности окружающей среды по IpB (величине тока накачки, определенной на шаге 522 во время работы датчика без ПН) и величине тока накачки сухого воздуха, определенной и (или) найденной на шаге 520. Затем можно определить величину восстановления кислорода из-за разбавляющего влияния влаги из окружающей среды по разности между током накачки сухого воздуха и током накачки IpB, определенным на шаге 522. Умножив данную разность на переводной коэффициент, ее можно перевести из тока накачки в процентное влагосодержание. Таким образом, сравнив выходной сигнал датчика кислорода, работающего в режиме без ПН при базовом опорном напряжении, с хранящимся в памяти значением тока накачки сухого воздуха, можно определить влажность окружающей среды при постоянной работе датчика кислорода в режиме ПН. Значение влажности окружающей среды, полученное на шаге 524, можно использовать для корректировки значений токов накачки на шагах 416 и 430 способа 400, и (или) сохранить в запоминающем устройстве контроллера. В других примерах можно регулировать работу двигателя в зависимости от полученного значения влажности окружающей среды.
На ФИГ. 6 представлен способ 600 для оценки воздушно-топливного отношения отработавших газов (например, ВТО) во время работы датчика кислорода в отработавших газах в режиме переменного напряжения. Контроллер может использовать способ 600, если датчик кислорода в отработавших газах, используемый для оценки давления отработавших газов, как раскрыто выше, является тем же датчиком, что и датчик кислорода в отработавших газах, используемый для оценки воздушно-топливного отношения отработавших газов (например, тем же датчиком, что датчик воздушно-топливного отношения). При осуществлении способа 600 ток накачки, генерируемый датчиком кислорода в отработавших газах (например, датчиком 126 кислорода), можно сравнивать с опорным током накачки. Опорный ток накачки может представлять собой ток накачки, ожидаемый на основании поданного на датчик кислорода опорного напряжения и известного отношения между током накачки и воздушно-топливным отношением. Иначе говоря, можно использовать ряд функций преобразования значений тока накачки в значения воздушно-топливного отношения при разных значениях опорного напряжения датчика для определения опорного тока накачки.
Так, известное соответствие между током накачки и воздушно-топливным отношением при заданном опорном напряжении датчика кислорода (например, функция преобразования) можно сравнить со значением тока накачки, производимым датчиком кислорода, для определения отклонения. Указанное отклонение можно использовать для оценки воздушно-топливного отношения. Команды для осуществления способа 600 можно хранить в запоминающем устройстве контроллера двигателя, например, контроллера 12 на ФИГ. 1. Таким образом, контроллер может выполнять способ 600.
Выполнение способа 600 начинают на шаге 602, оценивая и (или) измеряя условия работы двигателя. Условия работы двигателя можно определять по сигналам обратной связи от нескольких датчиков, при этом указанные условия могут включать в себя: температуру двигателя, частоту вращения и нагрузку двигателя, массовый расход всасываемого воздуха, давление в коллекторе и т.п.
На шаге 604 контроллер может использовать датчик кислорода в отработавших газах (например, датчик 126 или 200 кислорода на ФИГ. 1-2) как датчик воздушно-топливного отношения и измерять ток накачки первой величины (Ip), генерируемый при подаче более низкого опорного напряжения первой величины на датчик кислорода. Более низкое опорное напряжение первой величины может представлять собой опорное напряжение, достаточно низкое (например, приблизительно 450 мВ) для того, чтобы не происходила диссоциация водяных паров и двуокиси углерода. Ток накачки первой величины датчика кислорода при опорном напряжении первой величины может относительно мало зависеть от изменений влажности окружающей среды или концентрации этанола в топливе, так как диссоциация водяных паров и двуокиси углерода не происходит. Поэтому между током накачки первой величины и воздушно-топливным отношением может существовать прямая зависимость. В связи с этим, контроллер может перейти к шагу 606 для оценки воздушно-топливного отношения по значению тока накачки, полученному на шаге 604. Например, контроллер может оценить воздушно-топливное отношение по изменению тока накачки относительно опорного значения, полученного в режиме без подачи топлива в двигатель, например, во время отсечки топлива в режиме замедления (ОТРЗ).
Затем, на шаге 608, контроллер может проверить соблюдение условий для эксплуатации датчика кислорода в отработавших газах в режиме переменного напряжения (ПН) для оценки давления отработавших газов. А именно, датчик кислорода можно эксплуатировать в режиме ПН, если контроллер устанавливает желательность оценки давления отработавших газов с помощью датчика кислорода в отработавших газах, как раскрыто выше со ссылкой на ФИГ. 3-4. Если контроллер устанавливает, что эксплуатация датчика кислорода в режиме ПН нежелательна, то способ 600 переходит к шагу 610 для оценки воздушно-топливного отношения по выходным сигналам датчика кислорода, работающего при более низком опорном напряжении первой величины. Иными словами, способ на шаге 610 может предусматривать продолжение использования датчика кислорода в отработавших газах в качестве датчика воздушно-топливного отношения при более низком опорном напряжении первой величины. Затем способ может перейти к шагу 620 для регулирования работы двигателя в зависимости от результата оценки воздушно-топливного отношения. В качестве примера, контроллер может отрегулировать количество топлива, впрыскиваемое в цилиндры двигателя (например, цилиндр 30), если результат оценки воздушно-топливного отношения отличается от желаемого воздушно-топливного отношения, при этом желаемое воздушно-топливное отношение может зависеть от параметров работы двигателя, в том числе от нагрузки двигателя, частоты вращения двигателя, температуры двигателя и т.п.
Однако, если на шаге 608 контроллер устанавливает, что работа датчика кислорода в режиме ПН для оценки давления отработавших газов желательна, способ 600 может перейти к шагу 612 для подачи более высокого опорного напряжения второй величины на датчик кислорода и определения опорного Ip при опорном напряжении второй величины. Указанное опорное напряжение второй величины может представлять собой напряжение, достаточно высокое (например, приблизительно 1100 мВ) для диссоциации водяных паров и двуокиси углерода, и напряжение второй величины, необходимое для оценки давления отработавших газов. Опорный Ip можно определить с помощью функции преобразования, связывающей ток накачки с воздушно-топливным отношением для заданного опорного напряжения (например, для опорного напряжения, превышающего базовое опорное напряжение первой величины около 450 мВ). Кроме того, для функции преобразования можно установить ограничения в виде исходного состояния по влажности окружающей среды и концентрации этанола. В одном примере указанным исходным состоянием может быть концентрация этанола и влажность окружающей среды, равные 0%. В другом примере в основе указанного исходного состояния может лежать скорректированная функция преобразования, в которой влажность окружающей среды и концентрация этанола могут отличаться от 0%. Таким образом, контроллер может найти функцию преобразования, относящуюся к опорному напряжению второй величины, подаваемому на датчик на шаге 612, из нескольких функций преобразования, каждая из которых относится к определенному значению опорного напряжения. В одном примере указанные несколько функций преобразования можно хранить в запоминающем устройстве контроллера в виде зависимости от опорного напряжения датчика кислорода. Один пример функции преобразования представлен в виде кривой 702 на диаграмме 700 на ФИГ. 7. Кривая 702 связывает значения воздушно-топливного отношения со значениями опорного тока накачки для того или иного значения опорного напряжения. Кривая 702 может относиться к подаваемому опорному напряжению 1100 мВ. Таким образом, кривая 702 может представлять известное соответствие между током накачки и воздушно-топливным отношением для опорного напряжения второй величины, подаваемого на датчик кислорода при осуществлении способа 600, когда значения влажности и концентрации этанола соответствуют исходному состоянию. Контроллер может использовать функцию преобразования, относящуюся к значению опорного напряжения второй величины, для определения опорного тока накачки.
В одном варианте осуществления контроллер может определить значение опорного тока накачки по значению воздушно-топливного отношения, полученному на шаге 606 в режиме без ПН (например, при подаче на датчик кислорода более низкого опорного напряжения первой величины), и с помощью функции преобразования, относящейся к значению указанного опорного напряжения второй величины. Значение воздушно-топливного отношения, полученное на шаге 606, представляет собой последний по времени результат оценки воздушно-топливного отношения с помощью датчика кислорода, работавшего при более низком напряжении первой величины. Таким образом, контроллер может найти значение тока накачки, полученное с помощью функции преобразования и соответствующее опорному напряжению второй величины при значении воздушно-топливного отношения, полученном на шаге 606. Например, результат оценки воздушно-топливного отношения на шаге 606 может представлять собой воздушно-топливное отношение A1 на графике 700. На графике 700 воздушно-топливное отношение А1 задает точку X1 на кривой 702. К точке X1 относится ток накачки Р1. Так Р1 может служить примером опорного тока накачки, определяемого контроллером на шаге 612. Поскольку опорное напряжение датчика кислорода можно изменять от более низкого напряжения первой величины до более высокого напряжения второй величины за очень короткий отрезок времени, воздушно-топливное отношение может оставаться относительно постоянным во время перехода между двумя указанными опорными напряжениями. Поэтому точка X1 может представлять опорный ток накачки, ожидаемый при текущем значении воздушно-топливного отношения отработавших газов при исходных влажности и концентрации этанола.
В другом варианте осуществления контроллер может определять опорный ток накачки по заданному значению воздушно-топливного отношения и функции преобразования, относящейся к опорному напряжению второй величины. Например, указанное заданное значение воздушно-топливного отношения может составлять 1, как показано на графике 700. Согласно графику 700, воздушно-топливное отношение, равное 1, может задавать точку Х2 на кривой 702. К точке Х2 относится ток накачки Р2. Таким образом, Р2 может представлять собой опорный ток накачки, определенный контроллером на шаге 612. Следовательно, контроллер может определить опорный ток накачки, найдя значение тока накачки, определенное с помощью функции преобразования, относящейся к опорному напряжению второй величины при заданном значении воздушно-топливного отношения. Например, точка Х2 на графике 700 может представлять опорный ток накачки, ожидаемый при подаче опорного напряжения второй величины для заданного значения воздушно-топливного отношения.
Таким образом, опорный Ip можно определить по последнему по времени результату оценки воздушно-топливного отношения, когда датчик кислорода работал при более низком напряжении первой величины, и (или) по заданному значению воздушно-топливного отношения.
Определив опорный ток накачки на шаге 612, контроллер может перейти к измерению фактического тока накачки, генерируемого датчиком кислорода при более высоком опорном напряжении второй величины, на шаге 614. Например, ток накачки по результатам измерения при указанном более высоком опорном напряжении второй величины может находиться на уровне Р3 согласно графику 700 на ФИГ. 7. Как показано, Р3 может превышать P1 и Р2. В других примерах Р3 может быть ниже Р2, но выше P1. В другом примере Р3 может быть ниже P1 и Р2. Измеренное значение тока накачки Р3 может отличаться от опорного тока накачки из-за изменений влажности окружающей среды и (или) концентрации этанола в топливе относительно исходного состояния. В этом случае, на шаге 616 контроллер может определить отклонение Ip по измеренному значению Ip, полученному на шаге 614, и опорному Ip, определенному на шаге 612.
В одном варианте осуществления отклонение Ip можно определить по разности опорного Ip и фактического измеренного Ip при более высоком опорном напряжении второй величины. Опорный Ip может представлять собой опорный Ip, определенный по последнему по времени результату оценки воздушно-топливного отношения во время работы датчика кислорода при более низком опорном напряжении первой величины. Например, на графике 700 на ФИГ. 7 указанная разность D может представлять собой разницу между опорным током накачки P1 и фактическим измеренным током накачки Р3. Как разъяснялось в отношении раскрытого выше варианта осуществления, воздушно-топливное отношение можно принять постоянным при А, во время перехода от более низкого первого к более высокому второму опорному напряжению. Таким образом, точка Х3 может обозначать измеренное значение тока накачки Р3 при том же воздушно-топливном отношении, что и опорный ток накачки, обозначенный точкой X1. Следовательно, разность D может представлять разницу между опорным током накачки и измеренным значением тока накачки для текущего значения воздушно-топливного отношения. Поэтому отклонение Ip может вызвать смещение функции преобразования для соответствующего опорного напряжения на величину разности опорного Ip и фактического измеренного Ip. Например, на ФИГ. 7 возможно смещение кривой 702 вертикально вверх на величину D. Иначе говоря, контроллер может обновить функцию преобразования для соответствующего опорного напряжения в зависимости от разности измеренного Ip и опорного Ip. Например, обновленная или смещенная функция может быть представлена кривой 704 на графике 700 ФИГ. 7. Следовательно, воздушно-топливное отношение можно определить, найдя соответствующую точку на обновленной функции преобразования, определенную измеренным значением тока накачки.
Важно учесть, что в рассматриваемом варианте осуществления отклонение Ip можно обновлять постоянно или по прошествии заданного интервала. Указанный интервал может представлять собой период времени, количество рабочих циклов двигателя и т.п. Поэтому опорный Ip может меняться в случае смещения функции преобразования в результате ее обновления. Однако, если функция преобразования не обновляется, а измеренное значение тока накачки меняется, то эти изменения тока накачки могут быть связаны с изменениями воздушно-топливного отношения. Следовательно, значения воздушно-топливного отношения можно определить путем поиска значения воздушно-топливного отношения, соответствующего измеренному значению тока накачки, определяемого последней по времени обновленной функцией преобразования.
В другом варианте осуществления отклонение Ip можно определить, сравнив измеренное значение Ip с опорным Ip, определяемым функцией преобразования, относящейся к более высокому опорному напряжению второй величины датчика кислорода для заданного значения воздушно-топливного отношения. Изменения Ip относительно опорного Ip могут быть связаны с каким-либо измеренным значением воздушно-топливного отношения. Например, ток накачки Р3 согласно графику 700 на ФИГ. 7 может представлять собой измеренное значение тока накачки при более высоком опорном напряжении второй величины. Как и в предыдущем варианте осуществления, можно определить разность измеренного значения тока накачки и значения тока накачки, полученного с помощью функции преобразования для опорного напряжения второй величины и последнего по времени результата оценки воздушно-топливного отношения во время работы датчика кислорода при более низком опорном напряжении первой величины. Однако вместо смещения функции преобразования, измеренное значение тока накачки можно наложить на функцию преобразования для указанного более высокого опорного напряжения второй величины при исходных влажности и концентрации этанола. Например, на ФИГ. 7 возможно смещение точки Х3 вниз до точки X1. Затем контроллер может определить отклонение Ip по разности опорного тока накачки и смещенного измеренного значения Ip. Например, на графике 700 указанная разность Е может представлять собой отклонение Ip, которое, в свою очередь, может представлять собой разность опорного тока накачки для заданного значения воздушно-топливного отношения на Х2 и смещенного измеренного значения тока накачки P1 и точки Х1 на функции преобразования, представленной в виде кривой 702. Изменения отклонения Ip могут быть связаны с изменениями воздушно-топливного отношения. Важно отметить, что в рассматриваемом варианте исходную функцию не изменяют, в связи с чем она может соответствовать условиям влажности и концентрации этанола в топливе, составляющим 0%. Кроме того, значение отклонения Ip можно обновлять постоянно или по прошествии определенного интервала, который можно задать заранее в виде периода времени, количества рабочих циклов двигателя и т.п. Итак, воздушно-топливное отношение можно оценить путем определения тока накачки по отклонению Ip с последующим поиском соответствующего значения воздушно-топливного отношения на кривой функции преобразования по отклонению тока накачки.
Определив отклонение Ip на шаге 616, контроллер может оценить воздушно-топливное отношение на шаге 618 по отклонению Ip и опорному Ip. Как раскрыто выше, отклонение Ip можно использовать для сопоставления измеренного значения тока накачки с функцией преобразования, которая может определять соответствующее значение воздушно-топливного отношения. В одном примере функцию преобразования можно скорректировать с учетом отклонения Ip и определить воздушно-топливное отношение по значению воздушно-топливного отношения, определенного для скорректированной функции преобразования, относящейся к измеренному значению Ip. В другом примере измеренное значение Ip корректируют на значение отклонения Ip, а воздушно-топливное отношение можно определить по значению воздушно-топливного отношения для опорной функции преобразования, относящейся к измеренному значению Ip.
Оценив воздушно-топливное отношение при более высоком опорном напряжении второй величины датчика кислорода на шаге 618, контроллер может перейти на шаг 620 и отрегулировать работу двигателя в зависимости от результата оценки воздушно-топливного отношения. В одном примере контроллер может изменить количество топлива, впрыскиваемого в цилиндры двигателя (например, цилиндр 30) в зависимости от желаемого количества топлива. Желаемое количество топлива можно определить в зависимости от таких параметров работы двигателя, как нагрузка двигателя, частота вращения двигателя, температура двигателя, расход РОГ и т.п.
Затем способ 600 может перейти на шаг 622, а контроллер может продолжить оценивать воздушно-топливное отношение по отклонению Ip, определенному на шаге 616. Таким образом, пока датчик кислорода работает при том же более высоком опорном напряжении второй величины, одно и то же значение отклонения Ip, определенное на шаге 616, можно использовать для оценки воздушно-топливного отношения. Последующие изменения тока накачки могут указывать на изменения воздушно-топливного отношения. Например, если отклонение Ip используют для корректировки функции преобразования, относящейся к указанному более высокому опорному напряжению второй величины, то измеренное значение тока накачки можно найти с помощью скорректированной функции преобразования, а соответствующее значение воздушно-топливного отношения можно использовать в качестве результата оценки воздушно-топливного отношения. Так, изменения тока накачки после того, как было определено отклонение Ip, могут быть связаны с изменениями воздушно-топливного отношения, которое можно оценить, найдя значения воздушно-топливного отношения, соответствующие измеренным значениям тока накачки с помощью скорректированной функции преобразования. В другом примере, если отклонение Ip используют для корректировки значений тока накачки, генерируемого датчиком кислорода, а не функции преобразования, то изменения скорректированных значений тока накачки можно находить с помощью функции преобразования, а соответствующие значения воздушно-топливного отношения можно использовать для оценки воздушно-топливного отношения.
Таким образом, давление отработавших газов двигателя можно оценивать по выходным сигналам датчика кислорода в отработавших газах, расположенного в выпускном канале двигателя. А именно, контроллер может получить первый выходной сигнал датчика кислорода, когда датчик кислорода работает при более высоком опорном напряжении второй величины, при котором диссоциируют молекулы воды в датчике. Затем контроллер может получить второй выходной сигнал датчика кислорода, работающего при том же напряжении второй величины и том же воздушно-топливном отношении, что и во время формирования первого выходного сигнала. Изменения давления отработавших газов можно определить по разности первого и второго выходных сигналов, при этом давление отработавших газов изменятся тем больше, чем больше разность первого и второго выходных сигналов. Сравнивая выходные сигналы датчика кислорода при более высоком напряжении второй величины, изменения давления отработавших газов можно определить с большей точностью, чем сравнивая выходные сигналы датчика кислорода при более низком напряжении первой величины (например, базовом напряжении около 450 мВ). Кроме того, используя датчик при более высоком напряжении второй величины, давление отработавших газов можно оценивать во время работы двигателя в условиях как с подачей, так и без подачи топлива. Так можно оценивать давление отработавших газов с большей точностью в расширенном диапазоне условий работы двигателя. В результате, точность управления двигателем в зависимости результатов оценки давления отработавших газов можно повысить.
В одном варианте осуществления способ предусматривает оценку давления отработавших газов, протекающих в выпускном канале двигателя, по разности первого выходного сигнала и второго выходного сигнала датчика кислорода, расположенного в выпускном канале, при этом, как первый, так и второй выходные сигналы снимают после повышения опорного напряжения датчика кислорода с более низкой первой величины до более высокой второй величины. В одном примере способ дополнительно содержит формирование второго выходного сигнала во время работы двигателя при том же воздушно-топливном отношении и при том же напряжении второй величины, что и во время формирования первого выходного сигнала. Кроме того, способ предусматривает формирование второго выходного сигнала во время работы двигателя с подачей топлива, когда осуществляется процесс регулирования воздушно-топливного отношения. В другом примере способ дополнительно содержит оценку изменения давления отработавших газов по разности первого и второго выходных сигналов. В еще одном примере способ дополнительно содержит корректировку значений первого и второго выходных сигналов с поправкой на влажность окружающей среды и оценку давления отработавших газов по скорректированным значениям первого и второго выходных сигналов.
Указанные первый и второй выходные сигналы датчика кислорода представляют собой выходные сигналы тока накачки во время работы датчика кислорода при напряжении второй величины. Кроме того, в одном примере оценка давления отработавших газов предусматривает оценку давления отработавших газов по разности первого и второго выходных сигналов и переводному коэффициенту, причем переводной коэффициент преобразовывает значение изменения тока накачки в соответствующее ему значение давления отработавших газов.
В одном примере оценку давления отработавших газов выполняют в одном или нескольких из следующих случаев: условия работы двигателя выходят за пределы диапазона для определения давления отработавших газов по модели давления отработавших газов, в основе которой лежат выбранные условия работы двигателя, и наличие запроса на подтверждение смоделированного значения давления отработавших газов, определенного по указанной модели давления отработавших газов. Способ может дополнительно содержать оценку топливно-воздушного отношения по указанному второму выходному сигналу во время оценки давления отработавших газов, когда датчик кислорода работает при напряжении второй величины. Кроме того, способ может дополнительно содержать регулирование работы двигателя в зависимости от результата оценки давления отработавших газов, причем регулирование работы двигателя включает в себя регулирование одного или нескольких из следующих параметров: подачи топлива в двигатель, заряда воздуха в двигателе и наддува двигателя. В одном примере напряжение первой величины представляет собой напряжение, при котором не происходит диссоциация молекул воды на датчике кислорода, а напряжение второй величины представляет собой напряжение, при котором происходит диссоциация молекул воды. Кроме того, датчик кислорода может быть расположен в выпускном канале двигателя выше по потоку от каталитического нейтрализатора.
В другом варианте осуществления способ содержит в условиях работы двигателя с подачей топлива: формирование первого выходного сигнала датчика кислорода, работающего при целевом опорном напряжении, при котором диссоциируют молекулы воды, когда воздушно-топливное отношение находится на первом уровне, причем датчик кислорода расположен в выпускном канале двигателя; последующее формирование второго выходного сигнала датчика кислорода, работающего при целевом опорном напряжении, когда воздушно-топливное отношение находится на первом уровне; и оценку давления отработавших газов, протекающих по выпускному каналу двигателя, по разности первого и второго выходных сигналов. В одном примере формирование первого выходного сигнала предусматривает формирование выходного сигнала тока накачки первой величины, генерируемого датчиком кислорода при целевом опорном напряжении при известном значении давления отработавших газов. Кроме того, второй выходной сигнал датчика кислорода представляет собой выходной сигнал тока накачки второй величины, генерируемого датчиком кислорода при целевом опорном напряжении, а оценка давления отработавших газов может предусматривать оценку давления отработавших газов по изменению давления отработавших газов во время между формированием первого выходного сигнала и второго выходного сигнала и известному значению давления отработавших газов, причем изменение давления отработавших газов определяют по разности первого и второго выходных сигналов. В другом примере способ дополнительно содержит корректировку значений первого и второго выходных сигналов с поправкой на влажность окружающей среды и оценку давления отработавших газов по разности скорректированных значений первого и второго выходных сигналов. Способ может дополнительно содержать оценку влажности окружающей среды по изменению выходного сигнала тока накачки датчика кислорода при постоянном изменении опорного напряжения датчика кислорода от более низкой первой величины до более высокой второй величины при отсутствии подачи топлива в цилиндры двигателя, содержащего указанный выпускной канал. Способ может дополнительно содержать регулирование работы двигателя в зависимости от результата оценки давления отработавших газов, при этом регулирование работы двигателя предусматривает регулирование одного или нескольких из следующих параметров: подачи топлива в двигатель, заряда воздуха в двигателе, наддува двигателя и регенерации фильтра твердых частиц.
В другом варианте осуществления способ содержит: при первом условии, когда условия работы двигателя находятся в пределах диапазона (например, предельных диапазонов) для моделирования давления отработавших газов, регулирование работы двигателя в зависимости от первого значения давления отработавших газов, оцененного по модели давления отработавших газов, основанной на выбранных условиях работы двигателя; и при втором условии регулирование работы двигателя в зависимости от второго значения давления отработавших газов, оцененного по первому выходному сигналу датчика кислорода в отработавших газах в режиме переменного напряжения, когда опорное напряжение датчика кислорода находится на целевом уровне, на котором диссоциируют молекулы воды, и во время работы двигателя при первом воздушно-топливном отношении, при этом второй выходной сигнал датчика кислорода в отработавших газах формируют по прошествии определенного интервала после первого выходного сигнала, во время работы датчика при целевом напряжении и работы двигателя при первом воздушно-топливном отношении. В одном примере первое условие дополнительно предусматривает нахождение первого значения давления отработавших газов в пределах второго значения давления отработавших газов. Способ может дополнительно содержать корректировку первого значения давления отработавших газов по второму значению давления отработавших газов и регулирование работы двигателя в зависимости от скорректированного первого значения давления отработавших газов.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и (или) транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых команд в долговременной памяти и выполняться системой управления, содержащей контроллер, совместно с различными датчиками, исполнительными механизмами и другими аппаратными средствами в составе двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и (или) функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и (или) функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия осуществляют путем выполнения указанных команд в системе, содержащей различные аппаратные средства в составе двигателя, совместно с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и (или) свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ НА ОСНОВЕ ОЦЕНКИ СОДЕРЖАНИЯ СПИРТА В ТОПЛИВЕ | 2016 |
|
RU2717478C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ НА ОСНОВЕ ОЦЕНКИ ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ ПОСРЕДСТВОМ КИСЛОРОДНОГО ДАТЧИКА С ИЗМЕНЯЕМЫМ НАПРЯЖЕНИЕМ | 2016 |
|
RU2717476C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РАСЧЕТА ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ ПОСРЕДСТВОМ КИСЛОРОДНОГО ДАТЧИКА ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2691872C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ КИСЛОРОДНЫМ ДАТЧИКОМ РЕГУЛИРУЕМОГО НАПРЯЖЕНИЯ | 2015 |
|
RU2702068C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ С ПОМОЩЬЮ ДАТЧИКА КИСЛОРОДА В ОТРАБОТАВШИХ ГАЗАХ | 2017 |
|
RU2669451C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ВЛАГИ В ОКРУЖАЮЩЕМ ВОЗДУХЕ ПОСРЕДСТВОМ ДАТЧИКА ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2665765C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОЦЕНКИ ВНЕШНЕГО ДАВЛЕНИЯ ПРИ ПОМОЩИ КИСЛОРОДНОГО ДАТЧИКА | 2016 |
|
RU2677915C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА АНТИДЕТОНАЦИОННОЙ ЖИДКОСТИ | 2016 |
|
RU2704371C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЭКСПЛУАТАЦИИ ДАТЧИКА СОДЕРЖАНИЯ КИСЛОРОДА В ОТРАБОТАВШИХ ГАЗАХ В ЗАВИСИМОСТИ ОТ КОНТАКТА ВОДЫ С ДАТЧИКОМ | 2017 |
|
RU2704895C2 |
| Способ обеспечения измерения влажности | 2016 |
|
RU2689227C2 |
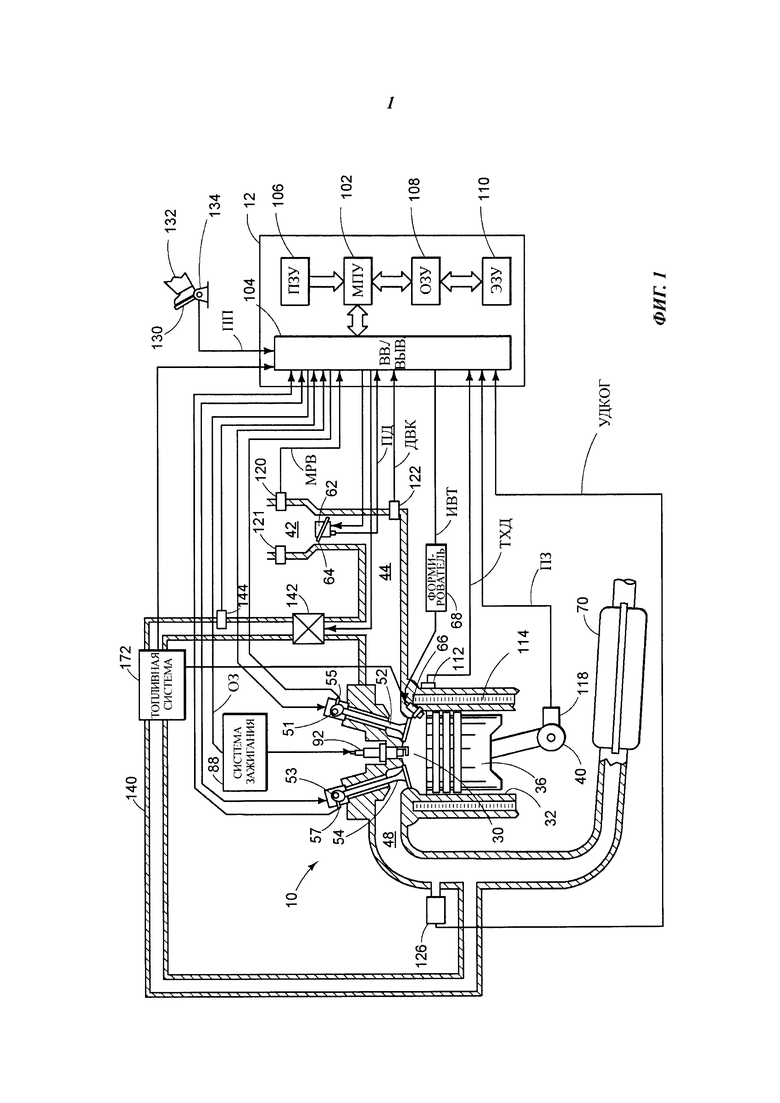
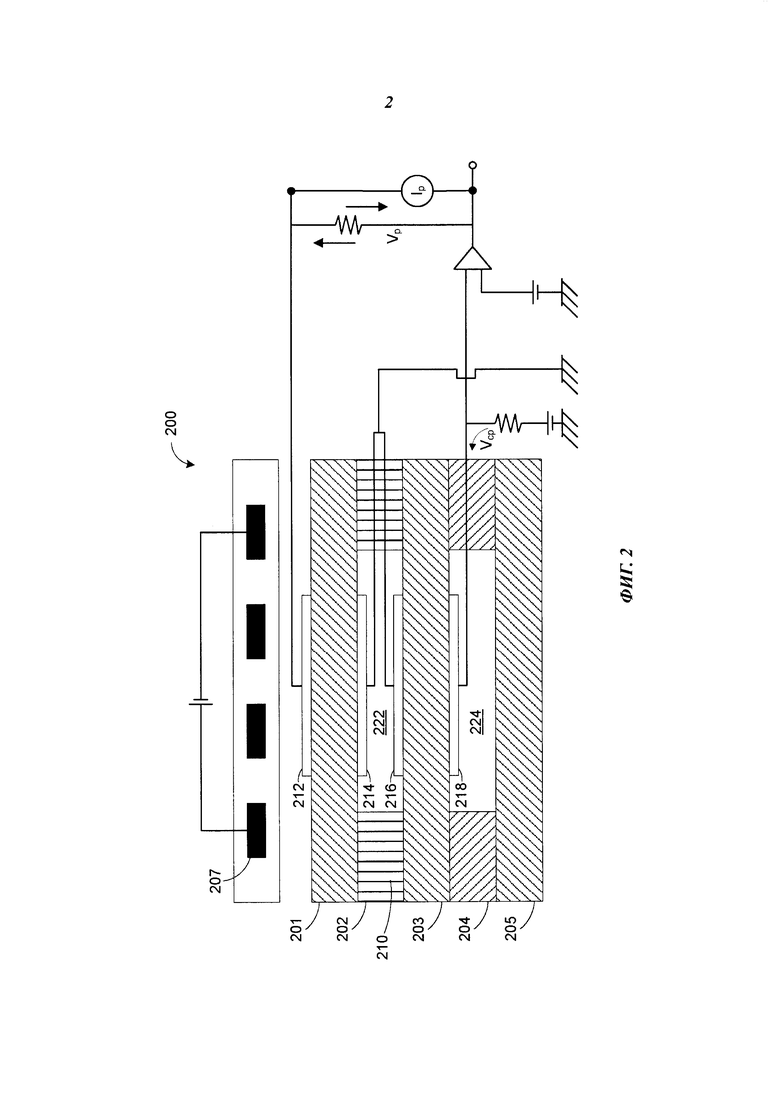
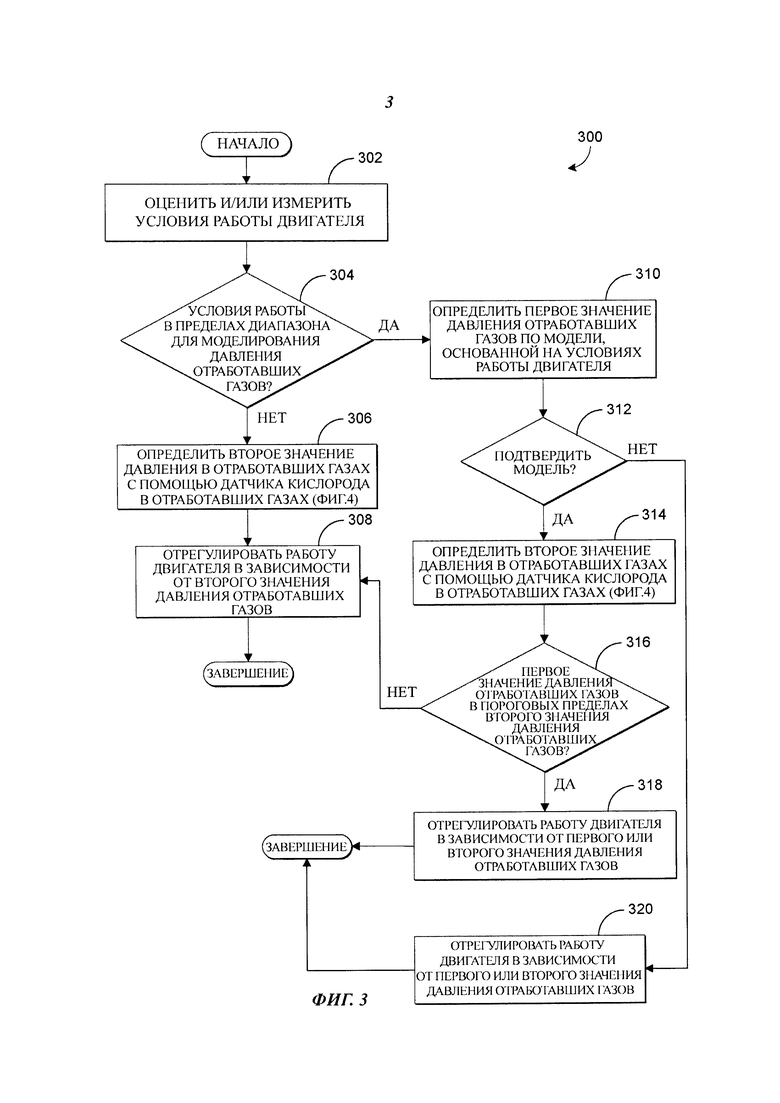
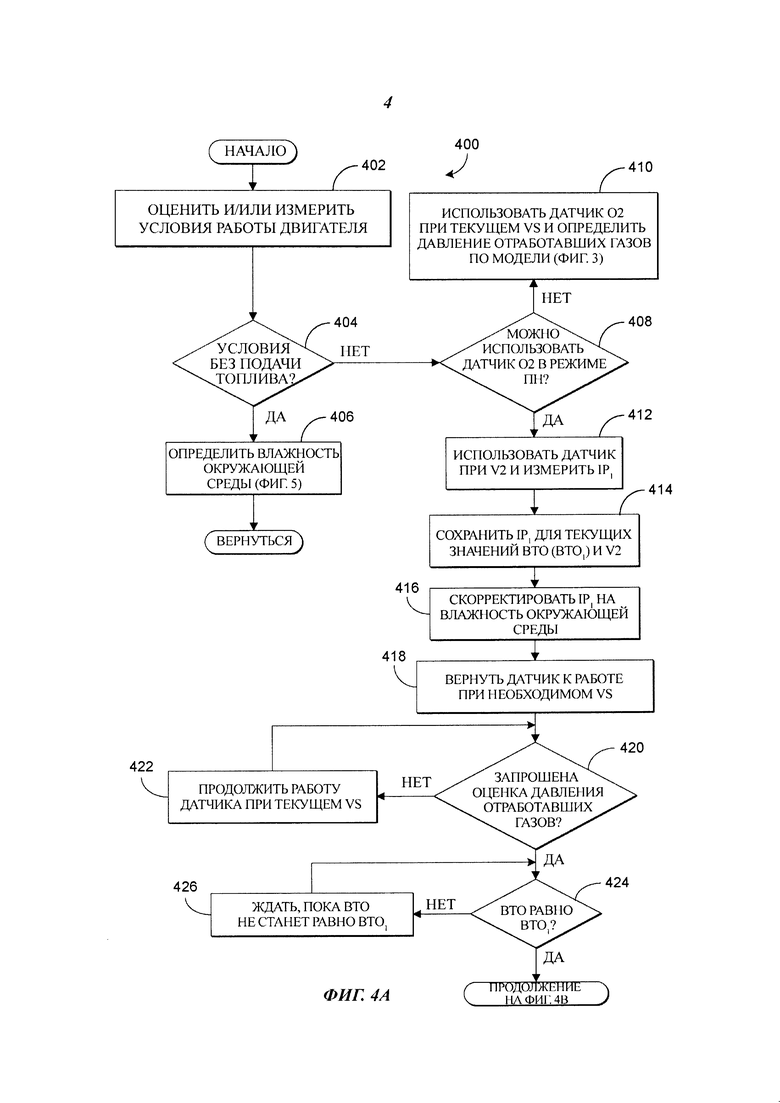

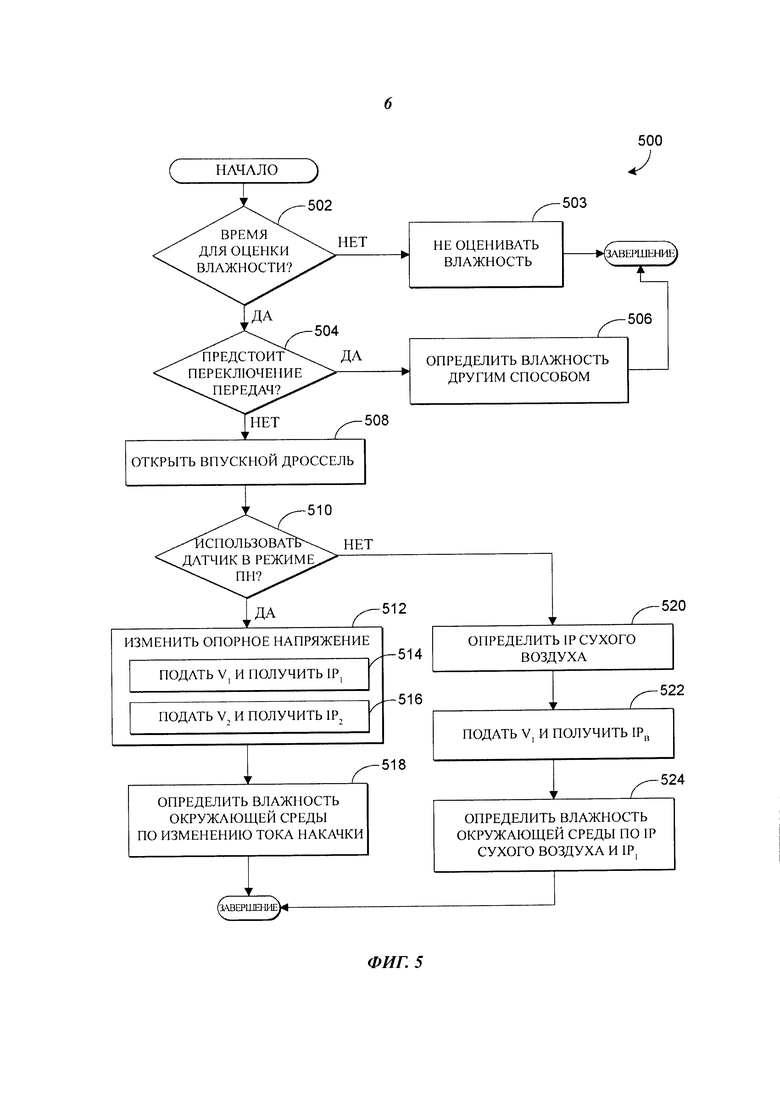

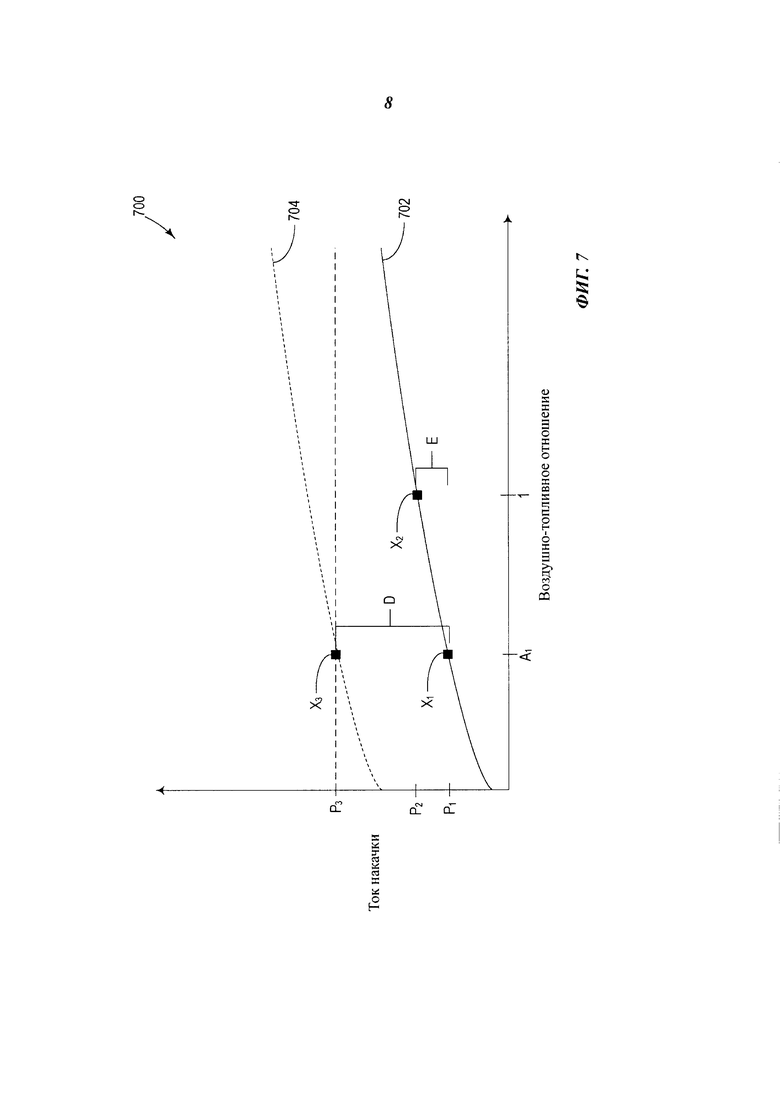
Группа изобретений относится к регулированию двигателя внутреннего сгорания. Предложены способы и система эксплуатации датчика отработавших газов с переменным напряжением в двигателе внутреннего сгорания. Сущность изобретений заключается в том, что способ может предусматривать оценку давления отработавших газов, протекающих в выпускном канале двигателя, по разности первого выходного сигнала и второго выходного сигнала датчика кислорода, расположенного в выпускном канале, с последующим регулированием работы двигателя в зависимости от оценённого давления отработавших газов. В одном примере как первый, так и второй из указанных выходных сигналов можно снимать во время работы двигателя в режиме переменного напряжения, после повышения опорного напряжения датчика кислорода с более низкого напряжения первой величины до более высокого напряжения второй величины. 3 н. и 17 з.п. ф-лы, 8 ил.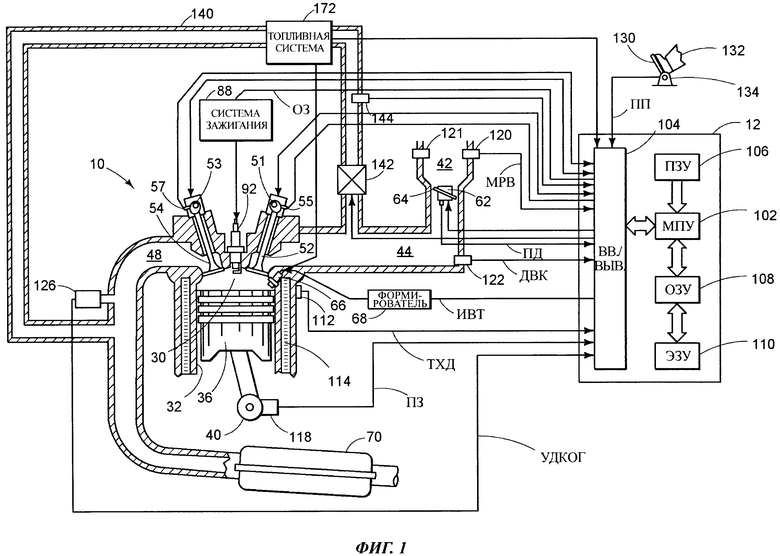
1. Способ эксплуатации датчика отработавших газов с переменным напряжением в двигателе внутреннего сгорания, содержащий шаги:
регулируют работу двигателя в зависимости от давления отработавших газов, протекающих по выпускному каналу двигателя, оцененному по разности первого выходного сигнала датчика кислорода, расположенного в указанном выпускном канале двигателя, и второго выходного сигнала указанного датчика кислорода, при этом оба: первый и второй, выходные сигналы снимают после повышения опорного напряжения датчика кислорода с более низкого напряжения первой величины до более высокого напряжения второй величины.
2. Способ по п. 1, в котором дополнительно второй выходной сигнал формируют во время работы двигателя в условиях того же воздушно-топливного отношения и при том же напряжении второй величины, что и во время формирования первого выходного сигнала.
3. Способ по п. 2, в котором дополнительно второй выходной сигнал формируют во время подачи топлива в двигатель, в то время как обеспечена возможность контролирования воздушно-топливного отношения.
4. Способ по п. 1, в котором дополнительно оценивают изменение давления отработавших газов по разности первого и второго выходных сигналов.
5. Способ по п. 1, в котором дополнительно корректируют значения каждого: первого и второго выходных сигналов в зависимости от влажности окружающей среды, и оценивают давление отработавших газов по скорректированным значениям первого и второго выходных сигналов.
6. Способ по п. 1, отличающийся тем, что первый и второй выходные сигналы датчика кислорода представляют собой выходные сигналы тока накачки, в то время как датчик кислорода работает при напряжении второй величины.
7. Способ по п. 6, в котором оценка давления отработавших газов предусматривает оценку давления отработавших газов по разности первого и второго выходных сигналов и переводному коэффициенту, причем переводной коэффициент преобразует изменение тока накачки в соответствующее ему давление отработавших газов.
8. Способ по п. 1, в котором оценку давления отработавших газов осуществляют в одном или нескольких из следующих случаев: условия работы двигателя выходят за пределы диапазона для моделирования давления отработавших газов с помощью модели давления отработавших газов, в основе которой лежат выбранные условия работы двигателя, и наличие запроса на подтверждение смоделированного давления отработавших газов, определенного по указанной модели давления отработавших газов.
9. Способ по п. 1, в котором дополнительно оценивают воздушно-топливное отношение по указанному второму выходному сигналу во время оценки давления отработавших газов, в то время как датчик кислорода работает при напряжении второй величины.
10. Способ по п. 1, в котором регулирование работы двигателя предусматривает регулирование одного или нескольких из следующих параметров: подачи топлива в двигатель, заряда воздуха в двигателе и наддува двигателя.
11. Способ по п. 1, в котором напряжение первой величины представляет собой напряжение, при котором не происходит диссоциация молекул воды в датчике кислорода, а напряжение второй величины представляет собой напряжение, при котором происходит диссоциация молекул воды.
12. Способ по п. 1, в котором датчик кислорода расположен в выпускном канале двигателя выше по потоку от каталитического нейтрализатора.
13. Способ эксплуатации датчика отработавших газов с переменным напряжением в двигателе внутреннего сгорания, содержащий шаги:
в условиях подачи топлива в двигатель:
формируют первый выходной сигнал датчика кислорода, работающего при целевом опорном напряжении, при котором молекулы воды диссоциируют, когда воздушно-топливное отношение находится на первом уровне, при этом датчик кислорода расположен в выпускном канале двигателя;
затем формируют второй выходной сигнал датчика кислорода, работающего при целевом опорном напряжении, когда воздушно-топливное отношение находится на первом уровне; и
оценивают давление отработавших газов, протекающих по выпускному каналу двигателя, по разности первого и второго выходных сигналов.
14. Способ по п. 12, в котором формирование первого выходного сигнала предусматривает формирование выходного сигнала тока накачки первой величины с помощью датчика кислорода при целевом опорном напряжении при известном значении давления отработавших газов.
15. Способ по п. 13, в котором второй выходной сигнал датчика кислорода представляет собой выходной сигнал тока накачки второй величины, генерируемый датчиком кислорода, при целевом опорном напряжении, причем оценка давления отработавших газов предусматривает оценку давления отработавших газов по изменению давления отработавших газов во время между формированием первого выходного сигнала и второго выходного сигнала и известному значению давления отработавших газов, при этом изменение давления отработавших газов основывается на разности первого и второго выходных сигналов.
16. Способ по п. 12, в котором дополнительно корректируют значения первого и второго выходных сигналов в зависимости от влажности окружающей среды и оценивают давление отработавших газов по разности скорректированных значений первого и второго выходных сигналов.
17. Способ по п. 16, в котором дополнительно оценивают влажность окружающей среды по изменению выходного сигнала тока накачки, генерируемого датчиком кислорода, при постоянном варьировании опорного напряжения датчика кислорода между напряжением более низкой первой величины и напряжением более высокой второй величины, в то время как топливо не впрыскивают в цилиндры двигателя, содержащего указанный выпускной канал двигателя.
18. Способ по п. 12, в котором дополнительно регулируют работу двигателя в зависимости от оцененного давления отработавших газов, при этом регулирование работы двигателя предусматривает регулирование одного или нескольких из следующих параметров: подачи топлива в двигатель, заряда воздуха в двигателе, наддува двигателя и регенерации фильтра твердых частиц.
19. Система для эксплуатации датчика отработавших газов с переменным напряжением в двигателе внутреннего сгорания, содержащая:
датчик кислорода в отработавших газах, расположенный в выпускном канале двигателя выше по потоку от каталитического нейтрализатора; и
контроллер с машиночитаемыми командами для:
регулирования работы двигателя в зависимости от давления отработавших газов, протекающих по выпускному каналу, при этом давление отработавших газов оценивают по первому выходному сигналу датчика кислорода в отработавших газах, в то время как датчиком кислорода в отработавших газах управляют в режиме переменного напряжения, при этом опорное напряжение указанного датчика находится на уровне целевого напряжения, при котором диссоциируют молекулы воды, в то время как двигателем управляют при первом воздушно-топливном отношении, и по второму выходному сигналу датчика кислорода в отработавших газах, полученному по прошествии некоего интервала после первого выходного сигнала, в то время как датчиком кислорода в отработавших газах управляют при целевом напряжении, в то время как двигателем управляют при первом воздушно-топливном отношении.
20. Система по п. 19, в которой в основе указанного интервала лежит время между формированием первого выходного сигнала и получением контроллером запроса оценки давления отработавших газов, при этом указанный запрос осуществляется при соблюдении одного или нескольких из следующих условий: датчик кислорода в отработавших газах работает при целевом напряжении, двигатель работает за пределами обновляемого диапазона для модели давления отработавших газов, основанной на меняющихся параметрах работы двигателя, и наличие запроса подтверждения смоделированного давления отработавших газов, определенного по указанной модели давления отработавших газов.
| US 8056393 B, 15.11.2011 | |||
| US 5261271 A, 16.11.1993 | |||
| US 5287283 A, 15.02.1994 | |||
| US 2003089164 A1, 15.05.2003 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ПО МЕЖЦИКЛОВОЙ НЕСТАБИЛЬНОСТИ ПРОЦЕССА СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029124C1 |

