Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к способам и системам для эксплуатации датчика отработавших газов с изменяемым опорным напряжением в двигателе внутреннего сгорания.
Уровень техники
Датчик отработавших газов (например, кислородный датчик отработавших газов) может быть расположен в выпускной системе транспортного средства (автомобиля), и может быть использован для выявления различных составляющих отработавшего газа. Согласно одному примеру, датчик отработавших газов может быть использован для определения воздушно-топливного отношения в отработавшем газе, выпускаемом из двигателя внутреннего сгорания автомобиля. Сигнал датчика отработавших газов может затем быть использован для управления работой двигателя внутреннего сгорания в целях приведения автомобиля в движение. Согласно другому примеру, сигналы с выхода датчика отработавших газов могут быть использованы для оценки содержания воды в отработавшем газе. Данные оценки содержания воды с использованием кислородного датчика отработавших газов могут быть использованы для вычисления влажности окружающего воздуха во время работы двигателя. Более того, данные содержания воды могут быть использованы для вычисления содержания спирта в топливе, которое сгорело в двигателе. При определенных условиях датчик отработавших газов можно задействовать как кислородный датчик с изменяемым опорным напряжением ИОН (VVs, Variable Voltage), чтобы еще точнее определять содержание воды в отработавшем газе. При работе в режиме ИОН (VVs) опорное напряжение датчика отработавших газов увеличивают от нижнего, базового уровня (например, приблизительно 450 мВ) до верхнего, целевого уровня (например, в интервале 900-1100 мВ). Согласно некоторым примерам, более высокое, целевое напряжение может представлять собой напряжение, при котором происходит частичная или полная диссоциация молекул воды на кислородном датчике, в то время как базовое напряжение - это напряжение, при котором диссоциация молекул воды на датчике не происходит.
Однако, установлено существование потенциальных проблем, связанных с работой датчика отработавших газов в режиме ИОН (VVs). Согласно одному примеру, оценки воздушно-топливного отношения посредством датчика отработавших газов могут быть недостоверными, когда опорное напряжение увеличивают выше базового уровня, поскольку кислородный датчик более не находится в стехиометрических условиях. Например, при более высоких опорных напряжениях датчик вызывает диссоциацию молекул паров воды и двуокиси углерода, которые вносят вклад в значение концентрации кислорода, которая представлена током накачки - выходной величиной датчика отработавших газов. Поскольку величины содержания паров воды и двуокиси углерода изменяются в зависимости от влажности окружающего воздуха и концентрации этанола в топливе, а эти параметры не известны, то традиционные передаточные функции «воздушно-топливное отношение / ток накачки» не верны при повышенных опорных напряжениях. В результате, автомобиль может быть вынужден работать с разомкнутым контуром управления подачей топлива, что может отрицательно сказываться на выбросе токсичных веществ, расходе топлива и общей характеристике управляемости автомобиля.
Раскрытие изобретения
Согласно одному примеру, для решения вышеуказанных проблем может быть использован способ содержащий: во время работы кислородного датчика отработавших газов в режиме с изменяемым опорным напряжением, когда опорное напряжение кислородного датчика регулируют от более низкого, первого напряжения до более высокого, второго напряжения - регулирование работы двигателя исходя из воздушно-топливного отношения, оцениваемого на основе выходного сигнала кислородного датчика отработавших газов и находимого поправочного коэффициента, основанного на втором напряжении. Другими словами, находимый поправочный коэффициент может быть использован для коррекции данных оценки воздушно-топливного отношения, которые основываются на выходном сигнале кислородного датчика, когда кислородный датчик работает в режиме с изменяемым опорным напряжением. В результате, точность измерения воздушно-топливного отношения, в то время как кислородный датчик отработавших газов работает при более высоком, втором напряжении, может быть увеличена, и тем самым увеличена точность управления двигателем на основе оцениваемого воздушно-топливного отношения.
Согласно одному примеру, кислородный датчик отработавших газов может работать в режиме изменяемого напряжения, при котором опорное напряжение, прикладываемое к кислородному датчику, можно изменять между более низким, первым напряжением, при котором не происходит диссоциации молекул паров воды и двуокиси углерода, и более высоким, вторым напряжением, при котором имеет место диссоциация молекул воды и/или двуокиси углерода. Поправочный коэффициент может быть найден на основе разности между выходным сигналом тока накачки кислородного датчика, когда последний работает при более высоком, втором напряжении, и контрольным током накачки. Контрольный ток накачки может быть основан на известной передаточной функции, которая связывает токи накачки и воздушно-топливные отношения конкретно при втором опорном напряжении. Поправочный коэффициент может быть использован для коррекции измеренных значений воздушно-топливного отношения, когда кислородный датчик работает в режиме с изменяемым напряжением. Таким образом, когда кислородный датчик отработавших газов работает в режиме изменяемого напряжения в целях определения дополнительного параметра работы двигателя, оценка воздушно-топливного отношения может также производиться на основе выходного сигнала кислородного датчика отработавших газов, при этом не возникает необходимости переходить к управлению воздушно-топливным отношением с разомкнутым контуром обратной связи.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
Фиг. 1 схематически изображает двигатель, содержащий кислородный датчик отработавших газов.
Фиг. 2 представляет диаграмму, изображающую, как на результаты оценивания воздушно-топливного отношения могут влиять изменения опорного напряжения кислородного датчика отработавших газов.
Фиг. 3 представляет диаграмму, изображающую влияние опорного напряжения на выходные сигналы кислородного датчика отработавших газов.
Фиг. 4 представляет диаграмму, изображающую влияние концентрации этанола в топливе на выходные сигналы кислородного датчика отработавших газов.
Фиг. 5 изображает блок схему алгоритма осуществления способа для оценивания воздушно-топливного отношения в отработавшем газе во время работы кислородного датчика отработавших газов в режиме с изменяемым напряжением.
Фиг. 6 изображает диаграммы, иллюстрирующие способ фиг. 5.
Фиг. 7 изображает диаграммы, иллюстрирующие изменения результатов оценки воздушно-топливного отношения при изменении условий работы двигателя с использование кислородного датчика отработавших газов.
Осуществление изобретения
Последующее описание относится к системам и способам для оценивания воздушно-топливного отношения в отработавшем газе. Как показано на фиг. 1, двигатель может содержать кислородный датчик отработавших газов, расположенный в выпускном канале двигателя. Этот кислородный датчик может представлять собой кислородный датчик с изменяемым напряжением, так что опорное напряжение кислородного датчика можно регулировать между более низким, первым напряжением, при котором не происходит диссоциации молекул паров воды и двуокиси углерода, и более высоким, вторым напряжением, при котором имеет место диссоциация молекул воды и/или двуокиси углерода. Выходные сигналы кислородного датчика могут быть в форме токов накачки, которые могут быть использованы для определения воздушно-топливного отношения отработавшего газа. Точнее, изменения тока накачки от опорного уровня, взятого, когда кислородный датчик работал в условиях отсутствия подачи топлива, например, в режиме отсечки топлива при замедлении движения автомобиля ОТЗ (DFSO, Deceleration Fuel Shut-Off), могут быть использованы для вычисления воздушно-топливного отношения. Однако, как показано на фиг. 2, при работе с более высоким, вторым напряжением, выходные сигналы кислородного датчика могут быть искажены, и, как таковая, может быть снижена точность оценок воздушно-топливного отношения. При условиях постоянной влажности и концентрации этанола в топливе могут быть определены передаточной функции между током накачки и воздушно-топливным отношением для любого данного опорного напряжения, как показано на фиг. 3. Таким образом, пока влажность окружающего воздуха и концентрация этанола в топливе остаются постоянными, изменения опорного напряжения могут быть учтены путем выбора передаточной функции, соответствующей новому значению опорного напряжения. Однако, если влажность окружающего воздуха и концентрация этанола в топливе изменяются, точность оценки воздушно-топливного отношения с использованием передаточных функций снижается. Более конкретно, изменения концентрации этанола в топливе могут влиять на ток накачки и, следовательно, на оценку воздушно-топливного отношения, что иллюстрирует фиг. 4. На фиг. 5 показан алгоритм осуществления способа увеличения точности оценки воздушно-топливного отношения во время работы кислородного датчика при более высоком, втором опорном напряжении. Точнее, на основе сравнения тока накачки, измеренного при втором опорном напряжении, с контрольным током накачки может быть зафиксировано смещение, как можно видеть из фиг. 6. Найденное смещение затем может быть использовано для коррекции воздушно-топливного отношения. В сущности, могут быть уменьшены ошибки измерения воздушно-топливного отношения, когда кислородный датчик работает в режиме с изменяемым напряжением, что показано на фиг. 7.
На фиг. 1 схематически изображен один цилиндр многоцилиндрового двигателя 10, который может быть включен в систему привода автомобиля. Управление двигателем 10 может осуществляться по меньшей мере частично посредством управляющей системы, содержащей контроллер 12, и командой от оператора (водителя) 132 автомобиля посредством устройства 130 ввода. В данном примере, устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для формирования сигнала ПП пропорционального положению педали. Камера сгорания (т.е. цилиндр) 30 двигателя 10 может содержать стенки 32 и расположенный внутри поршень 36. Поршень 36 может быть связан с коленчатым валом 40 для преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть связан по меньшей мере с одним ведущим колесом автомобиля через промежуточную систему трансмиссии. Кроме того, для обеспечения запуска двигателя 10, с коленчатым валом 40 через маховик может быть связан мотор стартера.
Камера 30 сгорания может принимать всасываемый воздух из впускного коллектора 44 через впускной канал 42, и может высвобождать отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут выборочно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых конструкциях камера 30 сгорания может содержать два или более впускных клапанов и/или два или более выпускных клапанов.
В данном примере управление впускным клапаном 52 и выпускным клапаном 54 может осуществляться при помощи кулачков посредством соответствующих систем 51 и 53 кулачкового привода. Системы 51 и 53 кулачкового привода могут содержать один или более кулачков, и могут реализовывать одну или более из следующих систем газораспределения: систему переключения профилей кулачков ППК (CPS, Cam Profile Switching), систему изменения фаз кулачкового газораспределения ИФКГ (VCT, Variable Cam Timing), систему изменения фаз газораспределения ИФГ (VVT, Variable Valve Timing) и/или систему переменного газораспределения с регулированием высоты подъема клапанов ИВПК (VVL, Variable Valve Lift), которые могут приводиться в действие посредством контроллера 12 в целях изменения программы работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 можно определять посредством соответствующих датчиков 55 и 57 положения. В иных конструкциях управление впускным клапаном 52 и/или выпускным клапаном 54 может осуществляться посредством электромагнита. Как вариант, цилиндр 30 может содержать электроуправляемый впускной клапан, и управляемый кулачком выпускной клапан, при этом могут быть реализованы системы газораспределения ППК (CPS) и/или ИФКГ (VCT).
Согласно некоторым вариантам осуществления, каждый цилиндр двигателя 10 может быть выполнен с одной или более топливными форсунками, для подачи в цилиндр топлива. В качестве примера, который не носит ограничительного характера, показано, что цилиндр 30 содержит одну топливную форсунку 66. Показано, что топливная форсунка 66 связана непосредственно с цилиндром 30 для впрыска топлива напрямую в цилиндр пропорционально длительности импульса впрыска топлива ДИВТ (FPW, Fuel Pulse Width), принимаемого от контроллера 12 через электронный усилитель (драйвер) 68. При таком способе топливная форсунка 66 реализует так называемый непосредственный впрыск топлива в камеру 30 сгорания.
Следует понимать, что в ином варианте топливная форсунка 66 может представлять собой форсунку впрыска топлива во впускной канал, которая подает топливо во впускной канал в область перед цилиндром 30. Следует также понимать, что цилиндр 30 может принимать топливо от нескольких форсунок, например, нескольких форсунок впрыска во впускной канал, нескольких форсунок непосредственного впрыска, или же от комбинации указанных форсунок.
Топливный бак в топливной системе 172 может содержать в себе виды топлива с различными свойствами, например, смеси различных видов топлива. Различия могут заключаться в различном содержании спирта, различном октановом числе, различной теплоте парообразования, различии смесей топлива и/или представлять сочетание указанных различий. В двигателе может использоваться спиртосодержащая топливная смесь, такая как Е85 (которая состоит приблизительно из 85% этанола и 15% бензина) или М85 (которая состоит приблизительно из 85% метанола и 15% бензина). С другой стороны, двигатель может работать с бензином и этанолом в других соотношениях, которые содержатся в топливном баке, включая 100% бензин и 100% этанол, а также с различными промежуточными соотношениями в зависимости от содержания спирта в топливе, которое водитель заливает в бак. Более того, характеристики топлива в топливном баке могут часто меняться. Например, водитель в один день может залить в бак Е85, на следующий день Е10, а на следующий Е50. В сущности, в зависимости от уровня и состава топлива, которое остается в баке на момент заправки, состав топлива в баке может динамично меняться.
Вариации заправки бака от дня ко дню могут таким образом приводить к частому изменению состава топлива в топливной системе 172, и тем самым могут влиять на состав топлива и/или свойства топлива, подаваемого форсункой 66. Разные составы топлива, подаваемого топливной форсункой 66, можно в данном случае называть типами топлива. Согласно одному примеру, меняющиеся составы топлива можно качественно характеризовать их октановым числом по исследовательскому методу, процентным содержанием спирта, процентным содержанием этанола и т.п.
Следует понимать, что хотя согласно одному варианту осуществления с двигателем можно работать путем подачи различных топливных смесей посредством форсунки непосредственного впрыска, согласно другим вариантам осуществления, с двигателем можно работать, используя две форсунки и варьируя относительное впрыскиваемое количество из каждой форсунки. Также следует понимать, что, когда двигатель работает с наддувом от устройства повышения давления, такого как воздушный нагнетатель или турбонагнетатель (не показаны), предельный наддув может быть увеличен, когда увеличивается содержание спирта в меняющейся топливной смеси.
Согласно фиг. 1, впускной канал 42 может содержать дроссель 62, в состав которых входит дроссельная заслонка 64. В данном конкретном примере положение дроссельной заслонки 64 может изменять контроллер 12 посредством сигнала, подаваемого на электрический мотор или привод, который входит в состав дросселя 62; при этом такая система называется системой электрического управления дросселем ЭУД (ETC, Electronic Throttle Control). Таким образом, дроссель 62 можно приводить в действие, чтобы изменять поток всасываемого воздуха, подаваемого в камеру 30 сгорания наряду с другими цилиндрами двигателя. Информация о положении дроссельной заслонки 64 может передаваться в контроллер 12 посредством сигнала положения дросселя ПД (TP, Throttle Position). Впускной канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для передачи в контроллер 12 соответствующих сигналов абсолютного давления в коллекторе ДВК (MAP, Manifold Absolute Pressure) и массового расхода всасываемого воздуха МРВ (MAF, Mass Air Flow).
Система 88 зажигания может создавать искру зажигания в камере 30 сгорания посредством искровой свечи 92 в ответ на сигнал опережения зажигания ОЗ (SA, Spark Advance) от контроллера 12. Хотя на фиг. 1 показаны компоненты искрового зажигания, в некоторых конструкциях камера 30 сгорания или одна или более других камер сгорания двигателя 10 могут работать в режиме компрессионного воспламенения с искрой зажигания или без искры зажигания.
Показано, что с выпускным каналом 48 в точке перед устройством 70 снижения токсичности выбросов связан универсальный линейный датчик 126 содержания кислорода в отработавших газах УДКОГ (UEGO, Universal Exhaust Gas Oxygen). Кислородный датчик 126 может также представлять собой кислородный датчик с изменяемым опорным напряжением ИОН (VVs). Опорное напряжение VVs кислородного датчика можно регулировать между более низким, базовым уровнем (например, первым напряжением), при котором не происходит диссоциации молекул воды, и более высоким, целевым уровнем (например, вторым напряжением), при котором имеет место диссоциация молекул воды. Выходные сигналы кислородного датчика при этих двух опорных напряжениях можно затем использовать для определения содержания воды в отработавших газах двигателя. Дополнительно, как будет более подробно рассмотрено ниже, кислородный датчик 126 можно использовать для индикации воздушно-топливного отношения отработавшего газа, как во время работы при более низком, базовом напряжении, так и во время работы при более высоком, целевом напряжении. Показано, что по ходу выпускного канала 48, после кислородного датчика ИОН (VVs) 126 расположено устройство 70 снижения токсичности выбросов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор ТКН (TWC, Three-Way Catalyst), уловитель NOx, различные другие устройства снижения токсичности выбросов или комбинацию указанных устройств. Согласно некоторым вариантам осуществления, при работе двигателя 10 устройство 70 снижения токсичности выбросов можно периодически восстанавливать до исходного состояния путем задействования по меньшей мере одного цилиндра двигателя с определенным воздушно-топливным отношением.
Как показано в примере на фиг. 1, система дополнительно содержит датчик 127 всасываемого воздуха, связанный с впускным каналом 44. Датчиком 127 может служить кислородный датчик ИОН (VVs), но датчик 127 может также представлять собой любой подходящий датчик для обеспечения индикации воздушно-топливного отношения отработавшего газа, такой как универсальный линейный датчик содержания кислорода в отработавших газах УДКОГ (UEGO, Universal Exhaust Gas Oxygen), кислородный датчик с двумя состояниями ДКОГ (EGO, Exhaust Gas Oxygen), нагреваемый датчик содержания кислорода в отработавших газах НДКОГ (HEGO, Heated Exhaust Gas Oxygen), датчик NOx, НС или CO.
Далее, согласно раскрываемым вариантам осуществления изобретения, система рециркуляции отработавших газов РОГ (EGR, Exhaust Gas Recirculation) может передавать требуемую часть отработавшего газа из выпускного канала 48 во впускной канал 44 через канал 140 системы РОГ (EGR). Количество отработавшего газа, передаваемого по контуру РОГ (EGR) во впускной канал 44, может изменять контроллер 12 посредством клапана 142 РОГ (EGR). Кроме того, в канале РОГ (EGR) может быть установлен датчик 144, чтобы обеспечивать индикацию одного из следующих параметров: давления, температуры и концентрации отработавшего газа. При некоторых условиях система РОГ (EGR) может быть использована для регулирования температуры воздушно-топливной смеси в камере сгорания, предоставляя тем самым способ управления моментом подачи искры в некоторых режимах горения. Кроме того, при некоторых условиях часть отработавших газов можно удерживать или запирать в камере сгорания путем управления моментом срабатывания выпускного клапана, например, путем управления механизмом ИФГ (VVT).
На фиг. 1 контроллер 12 показан в виде микрокомпьютера, содержащего центральное процессорное устройство ЦПУ (CPU, Central Processing Unit) 102, порты ввода/вывода В/В (I/O, Input-Output) 104, электронную среду хранения исполняемых программ и калибровочных значений, изображенную в данном примере в виде постоянного запоминающего устройства ПЗУ (ROM, Read-Only Memory) 106, оперативное запоминающее устройство ОЗУ (RAM, Random Access Memory) 108, энергонезависимое запоминающее устройство ЭЗУ (КАМ, Keep-Alive Memory) 110 и шину данных. Контроллер 12 может принимать различные сигналы от датчиков, связанных с двигателем 10, дополнительно к тем сигналам, о которых говорилось выше, включая: сигнал массового расхода всасываемого воздуха МРВ (MAF, Mass Air Flow) от датчика 120; сигнал температуры хладагента двигателя ТХД (ЕСТ, Engine Coolant Temperature) от датчика 112, связанного с рубашкой 114 охлаждения; сигнал профиля зажигания ПЗ (PIP, Profile Ignition Pickup) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 40; сигнал положения дросселя ПД (TP, Throttle Position) от соответствующего датчика; и сигнал абсолютного давления в коллекторе ДВК (MAP, Manifold Absolute Pressure) отдатчика 122. Сигнал частоты вращения вала двигателя ЧВД (RPM, Revolutions per Minute) может быть сформирован контроллером 12 из сигнала ПЗ (PIP).
В постоянное запоминающее устройство 106 могут быть записаны машинно-читаемые данные, представляющие собой инструкции, исполняемые процессором 102 для реализации способов, которые будут рассмотрены ниже, а также иных вариантов, возможность существования которых предполагается, но которые конкретно не рассматриваются.
Как говорилось выше, на фиг. 1 показан только один цилиндр многоцилиндрового двигателя, при этом каждый цилиндр может аналогичным образом содержать свой собственный набор впускных/выпускных клапанов, топливную форсунку, искровую свечу и т.п.
На фиг. 2 диаграммы 200 показывают, как воздушно-топливное отношение отработавшего газа, оцениваемое посредством кислородного датчика (например, кислородного датчика 126) может быть искажено за счет изменений опорного напряжения кислородного датчика отработавших газов. График 202 изображает изменения опорного напряжения, приложенного к кислородному датчику, а график 204 воздушно-топливное отношение, оцененное на основе выходного сигнала кислородного датчика в виде тока накачки, о чем шла речь выше. Как говорилось в отношении фиг. 1, выходные сигналы от кислородного датчика отработавших газов с изменяемым опорным напряжением ИОН (VVs) (например, кислородного датчика 126) могут быть использованы для оценивания воздушно-топливного отношения в отработавшем газе. Более конкретно, выходные сигналы кислородного датчика могут быть в виде тока (Ip) накачки, формируемого за счет приложенного опорного напряжения. Ток накачки может изменяться в ответ на изменения количества топлива, подаваемого в цилиндры двигателя (например, цилиндр 30), и таким образом может быть использован в качестве индикатора воздушно-топливного отношения. Воздушно-топливное отношение можно оценивать на основе отклонения тока накачки от базового уровня, при котором топливо не подается в цилиндры двигателя. Значение базового уровня может быть оценено в условиях отсутствия подачи топлива, например, в режиме ОТЗ (DFSO). Дополнительно, кислородный датчик может быть использован для оценки количества воды в отработавшем газе, которое может быть использовано для оценивания различных параметров работы двигателя, таких как влажность окружающего воздуха, содержание этанола в топливе, и, если двигатель является двухтопливным - количества вводимой вторичной жидкости. Чтобы дать оценку содержания воды, опорное напряжение кислородного датчика может быть изменено между более низким, базовым напряжением V1, как показано на фиг. 2, при котором диссоциация молекул воды не происходит (например, приблизительно 450 мВ), и более высоким, целевым напряжением V2, при котором имеет место диссоциация молекул воды (например, приблизительно 1100 мВ). Содержание воды может быть оценено по разности токов накачки на выходе датчика при указанных двух разных опорных напряжениях. Таким образом, как видно из графика 202, чтобы измерить содержание воды в отработавшем газе, можно осуществить модуляцию опорного напряжения между V1 и V2.
Однако, при работе кислородного датчика с более высоким, целевым напряжением результат оценки воздушно-топливного отношения может быть искажен. Более конкретно, при более высоком опорном напряжении V2 кислородный датчик вызывает диссоциацию молекул водяного пара и двуокиси углерода, что может давать вклад в концентрацию кислорода, которую представляет сигнал Ip. Таким образом, в результате увеличения опорного напряжения может увеличиваться сигнал Iр благодаря увеличению концентрации кислорода, вызванной диссоциацией молекул водяного пара и диссоциацией молекул двуокиси углерода. В результате воздушно-топливное отношение может быть завышенным. Как можно видеть на графике 204, когда опорное напряжение увеличивается от V1 до V2, результат оценки воздушно-топливного отношения увеличивается от более низкого, первого уровня L1 до более высокого, второго уровня L2, несмотря на то, что фактическое воздушно-топливное отношение может оставаться на сравнительно том же, первом уровне L1. Следовательно, результаты оценки воздушно-топливного отношения могут иметь более низкую точность, когда кислородный датчик работает при опорном напряжении достаточно высоком, чтобы вызывать диссоциацию молекул воды и/или двуокиси углерода. Таким образом, традиционные способы измерения воздушно-топливного отношения, при которых используется датчик отработавших газов с изменяемым напряжением, могут быть ограничены измерением воздушно-топливного отношения только, когда кислородный датчик работает при более низком, базовом напряжении или при напряжении достаточно низком, чтобы не происходило диссоциации молекул паров воды и двуокиси углерода.
Чтобы увеличить точность измерения воздушно-топливного отношения, когда кислородный датчик работает при опорном напряжении достаточно высоком, чтобы вызывать диссоциацию молекул воды и двуокиси углерода, может быть использован поправочный коэффициент, чтобы компенсировать вклад от дополнительного кислорода, образовавшегося за счет диссоциации молекул воды и двуокиси углерода.
На фиг. 3 диаграммы 300 изображают как опорное напряжение, приложенное к кислородному датчику отработавших газов, может влиять на ток накачки - выходной сигнал кислородного датчика. Контроллер (например, контроллер 12) может управлять опорным напряжением, прикладываемым к кислородному датчику, и, как таковое, опорное напряжение, приложенное к кислородному датчику, может быть известно в любой момент времени. Диаграммы 300 представляют множество кривых 300 передаточных функций, причем каждая кривая 300 передаточной функции показывает, как ток накачки и воздушно-топливное отношение могут соотноситься друг с другом при данном опорном напряжении. Точнее, при данном опорном напряжении воздушно-топливное отношение может увеличиваться, когда ток накачки увеличивается. Как говорилось выше, увеличение тока накачки может быть связано с увеличением концентрации кислорода, что может предполагать увеличение количества окружающего воздуха по отношению к топливу. Соотношение между током накачки и воздушно-топливным отношением может быть найдено для любого данного опорного напряжения. Таким образом, для данного опорного напряжения может быть определена известная передаточная функция, связывающая ток накачки и воздушно-топливное отношение. Однако, изменения опорного напряжения также приводят к изменению тока накачки. Для данного воздушно-топливного отношения, когда опорное напряжение возрастает, также возрастает и ток накачки. Как говорилось ранее, увеличение тока накачки может быть вызвано вкладом от молекул воды и двуокиси углерода, когда они диссоциируют при увеличении опорного напряжения. Форма передаточных функций может оставаться постоянной при всех опорных напряжениях, однако, передаточной функции могут быть смещены друг относительно друга. Другими словами, для всех опорных напряжений, изменения воздушно-топливного отношения на данную величину могут соответствовать такому же или подобному изменению тока накачки. Поэтому, все передаточной функции, показанные на диаграммах 300, могут быть наложены одна на другую путем сдвига вверх или вниз по оси тока накачки диаграмм 300. Таким способом может быть учтен дополнительный вклад кислорода от диссоциированных молекул воды и двуокиси углерода. Таким образом, если установить как диссоциированные молекулы воды и двуокиси углерода могут влиять на ток накачки, то в результат оценки воздушно-топливного отношения может быть внесена поправка, основанная на опорном напряжении, приложенном к кислородному датчику. Другими словами, поскольку опорное напряжение, приложенное к кислородному датчику, известно, то передаточная функция, описывающая зависимость между током накачки и воздушно-топливным отношением при известном опорном напряжении, может быть выбрана из множества передаточных функций, представляющих различные опорные напряжения (например, каждая передаточная функция может быть сохранена в памяти контроллера в качестве функции опорного напряжения кислородного датчика). При этом точность определения воздушно-топливного отношения может быть повышена при опорных напряжениях достаточно высоких, чтобы вызывать диссоциацию молекул воды и двуокиси углерода.
Важно отметить, что для всех изображенных передаточных функций на диаграммах 300 предполагается, что влажность окружающего воздуха и концентрация этанола в топливе остаются постоянными. Более конкретно, можно предполагать, что содержание этанола составляет 0%, и влажность окружающего воздуха составляет 0% для каждой передаточной функции, связывающей ток накачки и воздушно-топливное отношение. Однако, влажность окружающего воздуха и содержание этанола в топливе могут отличаться от указанных значений 0% базового уровня. Например, влажность окружающего воздуха может изменяться в зависимости от окружающих условий, где происходит вождение автомобиля, а концентрация этанола в топливе может изменяться после дозаправки. Изменения влажности окружающего воздуха и концентрации этанола в топливе могут влиять на ток накачки кислородного датчика, когда последний работает при опорных напряжениях достаточно высоких, чтобы вызвать диссоциацию молекул водяного пара и/или двуокиси углерода.
В качестве примера, на фиг. 4 диаграммы 400 изображают как концентрация этанола в топливе может влиять на ток накачки - выходной сигнал кислородного датчика (например, кислородного датчика 126), когда кислородный датчик работает при опорном напряжении достаточно высоком, чтобы вызывать диссоциацию молекул водяного пара и двуокиси углерода. Для данной концентрации этанола, как видно из графиков 400, воздушно-топливное отношение может увеличиваться при увеличении тока накачки. Таким образом, для данной концентрации этанола может быть найдена известная зависимость тока накачки от воздушно-топливного отношения. Изменения содержания этанола могут приводить к изменениям тока накачки, даже когда воздушно-топливное отношение остается постоянным. Точнее, ток накачки может увеличиваться в ответ на увеличение концентрации этанола. Однако, если не известна концентрация этанола в топливе, то может быть не известна и та степень, в какой содержание этанола в топливе влияет на ток накачки. На фиг. 3 в результаты оценки воздушно-топливного отношения может быть внесена поправка, основанная на изменениях опорного напряжения, поскольку опорное напряжение, приложенное к датчику, известно. Однако, поскольку концентрация этанола может быть не известна, к воздушно-топливному отношению не может быть применена поправка с учетом изменений концентрации этанола в топливе. Если нет возможности учесть влияние влажности и концентрации этанола на ток накачки, точность результатов оценки воздушно-топливного отношения может быть снижена при опорных напряжениях на кислородном датчике достаточно высоких, чтобы вызывать диссоциацию молекул водяного пара и двуокиси углерода.
На фиг. 5 изображена блок схема алгоритма 500 для коррекции результатов оценки воздушно-топливного отношения с четом изменений влажности окружающего воздуха и/или концентрации этанола в топливе. Более конкретно, может быть выполнено сравнение тока накачки, выдаваемого кислородным датчиком отработавших газов (например, кислородным датчиком 126), с контрольным током накачки. Контрольным током накачки может служить ожидаемый ток накачки, основанный на опорном напряжении, приложенном к кислородному датчику, и известной зависимости между током накачки и воздушно-топливным отношением. Другими словами, передаточной функции, представленные на фиг. 3, могут быть использованы для определения контрольного тока накачки. Таким образом, может быть выполнено сравнение известной зависимости между током накачки и воздушно-топливным отношением при данном опорном напряжении кислородного датчика (т.е. передаточная функция) с током накачки на выходе кислородного датчика, чтобы определить смещение. Указанное смещение может затем быть использовано для оценивания воздушно-топливного отношения. Инструкции для осуществления алгоритма 500 могут храниться в памяти контроллера двигателя, например, контроллера 12, показанного на фиг. 1. Далее, алгоритм 500 может быть исполнен контроллером.
Алгоритм 500 начинается на шаге 502, на котором производится оценивание и/или измерение условий (параметров) работы двигателя. Данные параметров работы двигателя могут основываться на сигналах обратной связи от множества датчиков, и могут включать: температуру двигателя, обороты двигателя и нагрузку, массовый расход воздуха на впуске, давление в коллекторе и т.п.
Основываясь на сигнале обратной связи от кислородного датчика отработавших газов (например, кислородного датчика 126), контроллер может измерить первый ток (Ip) накачки, порожденный более низким, первым опорным напряжением, приложенным к кислородному датчику. Указанным более низким, первым опорным напряжением может быть опорное напряжение достаточно низкое, чтобы не происходило диссоциации молекул водяного пара и двуокиси углерода (например, 450 мВ). Как было сказано ранее в отношении фиг. 2, первый ток накачки кислородного датчика при первом опорном напряжении может быть сравнительно не подвержен влиянию изменений влажности окружающего воздуха и концентрации этанола в топливе, так как не происходит диссоциации молекул паров воды и двуокиси углерода. Таким образом, первый ток накачки может быть непосредственно связан с воздушно-топливным отношением. В сущности, контроллер может перейти к шагу 506 и оценить воздушно-топливное отношение, основываясь на токе накачки, который был измерен на шаге 504. Как было объяснено в отношении фиг. 2, контроллер может оценить воздушно-топливное отношение, основываясь на изменении тока накачки от базового уровня, когда не происходило подачи топлива в двигатель, как, например, в режиме ОТЗ (DFSO).
Далее, на шаге 508 контроллер производит проверку, выполнены ли условия для работы кислородного датчика отработавших газов в режиме с изменяемым опорным напряжением ИОН (VVs). Точнее, с кислородным датчиком можно работать в режиме ИОН (VVs), когда контроллер определяет, что требуется оценивать одно или более свойств отработавшего газа. Кислородный датчик может быть использован в режиме ИОН (VVs), чтобы оценивать различные свойства отработавшего газа, такие как содержание воды, влажность, концентрацию этанола и т.п. Изменения тока накачки - выходного сигнала кислородного датчика, вызванные модуляцией опорного напряжения между первым, более низким уровнем и вторым, более высоким уровнем могут быть использованы для оценивания содержания воды и других свойств отработавшего газа. В качестве примера, если двигатель является двухтопливным, контроллер может определить, что требуется оценить содержание воды в отработавшем газе, так чтобы можно было отрегулировать количество второго топлива, подаваемого в двигатель. Если контроллер определяет, что работа кислородного датчика в режиме ИОН (VVs) не требуется, то алгоритм 500 переходит к шагу 510, и контроллер может продолжить оценивать воздушно-топливное отношение, основываясь на выходных сигналах кислородного датчика, работающего при более низком, первом опорном напряжении. Таким образом, на шаге 510 опорное напряжение кислородного датчика может быть сохранено на более низком, первом уровне, при котором не происходит диссоциации молекул паров воды и двуокиси углерода. Затем контроллер может перейти к шагу 520, и отрегулировать работу двигателя, исходя из оцененного воздушно-топливного отношения. В качестве примера, контроллер может отрегулировать количество топлива, подаваемого в цилиндры двигателя (например, в цилиндр 30), если оцененное воздушно-топливное отношение отличается от требуемого воздушно-топливного отношения, при этом требуемое воздушно-топливное отношение может основываться на параметрах работы двигателя, включая: нагрузку двигателя, обороты двигателя, температуру двигателя и т.п.
Однако, если на шаге 508 контроллер определяет, что требуется, чтобы кислородный датчик работал в режиме ИОН (VVs), алгоритм 500 может перейти к шагу 512, и контроллер может приложить к кислородному датчику более высокое, второе опорное напряжение, и определить контрольный ток Ip при втором опорном напряжении. Вторым опорным напряжением может быть напряжение достаточно высокое, чтобы вызывать диссоциацию молекул водяного пара и двуокиси углерода (например, 1100 мВ). Как говорилось в отношении фиг. 3, контрольный ток Ip может быть определен на основе передаточной функции, связывающей ток накачки с воздушно-топливным отношением для данного приложенного опорного напряжения (например, для данного опорного напряжения более высокого, чем базовое, первое опорное напряжение равное приблизительно 450 мВ). Далее передаточная функция может быть ограничена условием базового уровня для влажности окружающего воздуха и концентрации этанола. Согласно одному примеру, условием базового уровня может быть ситуация, когда обе величины - концентрация этанола и влажность окружающего воздуха - равны 0%. Как будет объяснено ниже, согласно другому примеру, условие базового уровня может основываться на обновленной передаточной функции, когда влажность окружающего воздуха и концентрация этанола могут отличаться от 0%. Таким образом, контроллер может выбрать передаточную функцию, связанную со вторым опорным напряжением, приложенным к датчику на шаге 512, из множества передаточных функций, в котором каждая передаточная функция привязана к конкретному опорному напряжению. Согласно одному примеру, множество передаточных функций может быть сохранено в памяти контроллера, в качестве функций опорного напряжения кислородного датчика. Пример передаточной функции изображен в виде графика 602 на диаграммах 600 фиг. 6. График 602 соотносит воздушно-топливные отношения с контрольными токами накачки для определенного опорного напряжения. График 602 может быть связан с приложенным опорным напряжением 1100 мВ. Как таковой, график 602 может представлять известное соотношение между током накачки и воздушно-топливным отношением для второго опорного напряжения, приложенного к кислородному датчику в алгоритме 500, когда влажность и концентрация этанола соответствуют условию базового уровня. Контроллер затем может использовать передаточную функцию, связанную со вторым опорным напряжением, для определения контрольного тока накачки.
Согласно одному варианту осуществления, контроллер может определить контрольный ток накачки на основе воздушно-топливного отношения, найденного на шаге 506 при работе датчика не в режиме ИОН (VVs) (например, при работе кислородного датчика при более низком, первом опорном напряжении), и передаточную функцию, связанную со вторым опорным напряжением. Воздушно-топливное отношение, найденное на шаге 506, представляет результат самого недавней оценки воздушно-топливного отношения, когда кислородный датчик работал при более низком, первом напряжении. Таким образом, контроллер может отыскать ток накачки, который определяется передаточной функцией, связанной со вторым опорным напряжением при воздушно-топливном отношении, которое было найдено на шаге 506. В качестве примера, воздушно-топливное отношение, оцененное на шаге 506, может представлять собой воздушно-топливное отношение показанное на диаграммах 600. Как видно из диаграмм 600, воздушно-топливное отношение определяет точку A1 на графике 602. Точка Х1 соответствует току накачки Р1. Таким образом, Р1 может служить примером контрольного тока накачки, который определен контроллером на шаге 512. Поскольку опорное напряжение кислородного датчика может быть изменено от более низкого, первого напряжения до более высокого, второго напряжения за очень короткий промежуток времени, во время перехода между двумя опорными напряжениями воздушно-топливное отношение может оставаться сравнительно тем же самым. Поэтому, точка X1 может представлять контрольный ток накачки, который можно было бы ожидать при текущем воздушно-топливном отношении в отработавшем газе при условиях влажности и концентрации этанола базового уровня.
Согласно другому варианту осуществления, контроллер может определить контрольный ток накачки на основе предварительно заданного воздушно-топливного отношения и передаточной функции, связанной со вторым опорным напряжением. В качестве примера, предварительно заданное воздушно-топливное отношение может равняться 1, как показано на диаграммах 600. Как видно из диаграмм 600, воздушно-топливное отношение равное 1 может определять точку Х2 на графике 602. Точке Х2 соответствует ток накачки Р2. Таким образом, Р2 может служить контрольным током накачки, который определен контроллером на шаге 512. Поэтому контроллер может определить контрольный ток накачки путем отыскания тока накачки, который определяет передаточная функция, соответствующая второму опорному напряжению при предварительно заданном воздушно-топливном отношении. В качестве примера, точка Х2 на диаграммах 600 может представлять контрольный ток накачки, который можно было бы ожидать для приложенного второго опорного напряжения для предварительно заданного воздушно-топливного отношения.
Таким образом, контрольный ток Ip может быть определен на основе результата самой недавней оценки воздушно-топливного отношения, когда кислородный датчик работал при более низком, первом напряжении, и/или на основе предварительно заданного воздушно-топливного отношения.
После того как контроллер определит контрольный ток накачки на шаге 512, затем контроллер может приступить к измерению фактического тока накачки на выходе кислородного датчика при более высоком, втором опорном напряжении (шаг 514). В качестве примера, измеренный ток накачки при более высоком, втором опорном напряжении может иметь уровень Р3, как показано на диаграммах 600 фиг. 6. Как показано, Р3 может быть больше, чем Р1 и Р2. Согласно другому примеру, Р3 может быть меньше, чем Р2, но больше, чем Р1. Согласно еще одному примеру, Р3 может быть меньше, чем Р1 и Р2. Измеренный ток накачки Р3 может отличаться от контрольного тока накачки из-за изменений влажности окружающего воздуха и/или концентрации этанола в топливе относительно условий базового уровня. Затем, на шаге 516 контроллер может определить смещение Ip исходя из Ip, измеренного на шаге 514, и контрольного Ip, найденного на шаге 512.
Согласно одному варианту осуществления, смещение Ip может быть определено на основе разности между контрольным Ip и фактически измеренным Ip при более высоком, втором опорном напряжении. Контрольный ток Ip может представлять собой контрольный ток Ip, который определен на основе результата самой недавней оценки воздушно-топливного отношения, когда кислородный датчик работал при своем более низком, первом опорном напряжении. В качестве примера, на диаграммах 600 фиг. 6 разность D - это разность между контрольным током накачки Р1 и фактически измеренным током накачки Р3. Как уже говорилось в отношении рассмотренного выше варианта осуществления изобретения, можно предположить, что воздушно-топливное отношение остается постоянным на уровне A1 во время перехода от более низкого, первого к более высокому, второму опорному напряжению. Таким образом, точка Х3 может определять измеренный ток накачки Р3 при том же самом воздушно-топливном отношении, что и контрольный ток накачки, который определен в точке Х1. Следовательно, разность D может представлять собой разность между контрольным током накачки и измеренным током накачки для текущего воздушно-топливного отношения. Следовательно, смещение Ip может сдвигать передаточную функцию для соответствующего опорного напряжения на величину разности между контрольным Ip и фактически измеренным Ip.В качестве примера, на фиг. 6 график 602 может быть сдвинут по вертикали вверх на величину D. Другими словами, контроллер может обновить передаточную функцию для соответствующего опорного напряжения, исходя из разности между измеренным Ip и контрольным Ip. В качестве примера, обновленная или сдвинутая передаточная функция может быть представлена графиком 604 на диаграммах 600. Поэтому, воздушно-топливное отношение может быть определено путем отыскания точки на обновленной передаточной функции, которая определяется измеренным током накачки.
Важно отметить, что в данном варианте осуществления смещение Ip можно обновлять непрерывно или по истечении предварительно заданного временного промежутка. Этот промежуток может представлять собой отрезок времени, число циклов двигателя и т.п. Как таковой, контрольный ток Ip может изменяться, если передаточная функция сдвигается в результате ее обновления. Однако, если обновления передаточной функции не производится, а измеренный контрольный ток изменяется, тогда такие изменения тока накачки могут быть связаны с изменениями воздушно-топливного отношения. Поэтому, воздушно-топливные отношения могут быть определены путем отыскания соответствующего воздушно-топливного отношения для измеренного тока накачки, как это определено самой недавно обновленной передаточной функцией.
Согласно другому варианту осуществления, смещение Ip может быть установлено путем сравнения измеренного Ip с контрольным Ip, который определен передаточной функцией, соответствующей более высокому, второму опорному напряжению кислородного датчика для предварительно заданного воздушно-топливного отношения. Изменения Ip по отношению к контрольному Ip могут быть связаны с измерением воздушно-топливного отношения. В качестве примера, ток накачки Р3, как показано на диаграммах 600 фиг. 6, может представлять собой измеренный ток накачки при более высоком, втором опорном напряжении. Как и в предыдущем варианте осуществления, может быть определена разность между измеренным током накачки и током накачки, который определен на основе передаточной функции для второго опорного напряжения и результата самой недавней оценки воздушно-топливного отношения, когда кислородный датчик работал при более низком, первом опорном напряжении. Однако, вместо сдвига передаточной функции, измеренный ток накачки может быть наложен на передаточную функцию для более высокого, второго опорного напряжения при условиях влажности и концентрации этанола, соответствующих базовому уровню. В качестве примера, на фиг. 6 точка Х3 может быть сдвинута вниз к точке Х1. Контроллер затем может определить смещение Ip на основе разности между контрольным током накачки и сдвинутым измеренным Ip. В качестве примера, на диаграммах 600 разность Е может равняться смещению Ip, которое может представлять собой разность токов накачки - разность между контрольным током накачки для заранее заданного воздушно-топливного отношения в точке Х2 и сдвинутым измеренным током накачки Р1 в точке Х1 на передаточной функции, представленной графиком 602. Изменения в смещении Ip могут тогда быть связаны с изменениями воздушно-топливного отношения. Важно отметить, что в данном варианте осуществления базовая передаточная функция не модифицируется, и, как таковая, может представлять условия 0% влажности и концентрации этанола в топливе. Кроме того, смещение Ip можно обновлять непрерывно или по истечении временного промежутка, при этом данный промежуток может быть предварительно задан в виде отрезка времени, числа циклов двигателя и т.п. Таким образом, воздушно-топливное отношение можно оценивать путем определения тока накачки, исходя из смещения Ip, а затем - отыскания воздушно-топливного отношения по передаточной функции, которая определяется смещенным током накачки.
После определения на шаге 516 смещения Ip контроллер затем на шаге 518 может оценить воздушно-топливное отношение на основе смещения Ip и контрольного Ip. Как говорилось выше, смещение Ip может быть использовано для определения соответствия измеренного тока накачки передаточной функции, которая может определять соответствующее воздушно-топливное отношение. Согласно одному примеру, к передаточной функции может быть применена поправка на величину смещения Ip, и воздушно-топливное отношение может быть определено посредством воздушно-топливного отношения, которое определяется указанной величиной для скорректированной передаточной функции, связанной с измеренным Ip. Согласно другому примеру, к измеренному Ip применяется поправка на величину смещения Ip, при этом воздушно-топливное отношение может быть определено посредством воздушно-топливного отношения, которое определяется указанной величиной для контрольной передаточной функции, связанной с измеренным Ip.
После оценивания воздушно-топливного отношения при втором, более высоком опорном напряжении кислородного датчика на шаге 518, контроллер может перейти к шагу 520, и отрегулировать работу двигателя исходя из оцененного воздушно-топливного отношения. Согласно одному примеру, контроллер может отрегулировать количество топлива, подаваемого в цилиндры двигателя (например, в цилиндр 30), исходя из требуемого количества топлива. Требуемое количество топлива может быть определено на основе параметров работы двигателя, таких как нагрузка двигателя, обороты двигателя, температура двигателя, поток в канале РОГ (EGR) и т.п.
Затем алгоритм 500 может перейти к шагу 522, и контроллер может продолжить оценивание воздушно-топливного отношения исходя из смещения Ip, которое было найдено на шаге 516. Таким образом, до тех пор, пока кислородный датчик продолжает работать при том же самом более высоком, втором опорном напряжении, то же самое смещение Ip, которое было найдено на шаге 516, может быть использовано для оценивания воздушно-топливного отношения. Как таковые, последующие изменения тока накачки могут быть признаком изменений воздушно-топливного отношения. В качестве примера, если смещение Ip изменяет передаточную функцию, связанную с более высоким, вторым опорным напряжением, тогда измеренный ток накачки может быть найден на этой измененной передаточной функции, и соответствующее воздушно-топливное отношение может быть использовано в качестве оцененного воздушно-топливного отношения. Таким образом, изменения тока накачки, происходящие после того, как было установлено смещение Ip, могут быть связаны с изменениями воздушно-топливного отношения, которое может быть оценено путем выбора воздушно-топливных отношений, соответствующих измеренным токам накачки на измененной передаточной функции. Согласно другому примеру, если смещение Ip корректирует токи накачки, выдаваемые кислородным датчиком, а не передаточную функцию, тогда изменения в скорректированных токах накачки можно отыскать на передаточной функции, и соответствующие воздушно-топливные отношения можно использовать для оценивания воздушно-топливного отношения.
Когда кислородный датчик больше не работает при более высоком втором опорном напряжении, величина смещения Ip может быть больше не нужна, и воздушно-топливное отношение можно обычно оценивать путем сравнения тока накачки на выходе кислородного датчика с током накачки на его выходе, когда кислородный датчик работал в отсутствии подачи топлива. Однако, когда снова производится ступенчатое увеличение опорного напряжения до более высокого второго уровня, то возможно, что влажность окружающего воздуха и концентрация этанола могли измениться с момента самой последней работы при более высоком, втором опорном напряжении. Таким образом, новые смещения Ip можно определять всякий раз, когда производится изменение опорного напряжения, приложенного к кислородному датчику, от более низкого, первого уровня до более высокого второго уровня. Согласно другому примеру, новые оценки смещения Ip можно производить по истечении предварительно заданного промежутка времени, при этом таким промежутком времени может служить число циклов изменения опорного напряжения. Таким образом, смещение Ip можно определять по прошествии предварительно заданного числа циклов перехода между работой при первом опорном напряжении и втором опорном напряжении. Согласно другим примерам, в качестве временного промежутка может использоваться отрезок времени, число циклов двигателя и т.п.
Таким образом, способ может содержать во время работы кислородного датчика в режиме с изменяемым напряжением, в котором опорное напряжение кислородного датчика изменяют от более низкого, первого напряжения до более высокого, второго напряжения - регулирование работы двигателя исходя из воздушно-топливного отношения, оцененного на основе выходного сигнала кислородного датчика отработавших газов и находимого поправочного коэффициента, основанного на втором напряжении. Выходным сигналом кислородного датчика отработавших газов является ток накачки, в то время как кислородный датчик отработавших газов работает при втором напряжении. Находимый поправочный коэффициент дополнительно основывается на ранее оцененном воздушно-топливном отношении при работе кислородного датчика отработавших газов в режиме с неизменяемым опорным напряжением, при котором опорное напряжение поддерживают на уровне первого напряжения. Способ может дополнительно содержать определение находимого поправочного коэффициента на основе начального тока накачки, выдаваемого кислородным датчиком отработавших газов при втором напряжении, передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения, и контрольного тока накачки, определяемого из передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения при ранее оцененном воздушно-топливном отношении. Определение находимого поправочного коэффициента может дополнительно включать в себя: выбор передаточной функции «ток накачки / воздушно-топливное отношение» из множества таких функций исходя из величины второго напряжения; и коррекцию выбранной передаточной функции «ток накачки / воздушно-топливное отношение» на основе разности между начальным током накачки и контрольным током накачки, при этом для скорректированной передаточной функции входной величиной является выходной сигнал кислородного датчика отработавших газов, а выходной величиной - воздушно-топливное отношение. Способ может дополнительно содержать коррекцию выходного сигнала кислородного датчика отработавших газов на основе находимого поправочного коэффициента, и оценивание воздушно-топливного отношения во время работы при втором напряжении на основе скорректированного выходного сигнала и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения. Способ может дополнительно содержать определение находимого поправочного коэффициента исходя из разности между начальным током накачки, выдаваемым кислородным датчиком отработавших газов при втором напряжении, и первым контрольным током накачки, основанным на предварительно заданном контрольном воздушно-топливном отношении, и разности между начальным током накачки и вторым контрольным током накачки, который определен из передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения при ранее оцененном воздушно-топливном отношении во время работы кислородного датчика отработавших газов в режиме с неизменяемым напряжением, при котором опорное напряжение поддерживают на уровне первого напряжения. Способ может дополнительно содержать во время работы кислородного датчика отработавших газов в режиме с изменяемым напряжением - определение дополнительного параметра работы двигателя исходя из первого выходного сигнала кислородного датчика отработавших газов при более низком, первом напряжении, и второго выходного сигнала кислородного датчика отработавших газов при более высоком, втором напряжении, при этом дополнительным параметром работы двигателя является один или более из следующих параметров: влажность окружающего воздуха, содержание воды в отработавшем газе, и содержание этанола в топливе.
Таким образом, способ может также содержать: эксплуатацию кислородного датчика отработавших газов в режиме с изменяемым напряжением, при котором опорное напряжение кислородного датчика увеличивают от более низкого, первого напряжения до более высокого, второго напряжения, с целью определения первых условий работы двигателя; и во время работы при втором напряжении - коррекцию выходного сигнала кислородного датчика отработавших газов на основе контрольного тока накачки при втором напряжении, и оценивание воздушно-топливного отношения исходя из скорректированного выходного сигнала. Выходным сигналом кислородного датчика отработавших газов является измеряемый ток накачки. Коррекция выходного сигнала кислородного датчика отработавших газов на основе контрольного тока накачки заключается в сравнении контрольного тока накачки с измеренным током накачки и определении смещения на основе разности между измеренным током накачки и контрольным током накачки. Контрольный ток накачки основывается на предыдущем воздушно-топливном отношении, оцененном, когда кислородный датчик отработавших газов работал в режиме с неизменяемым напряжением, до его работы в режиме с изменяемым напряжением, и на передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения. Контрольный ток накачки основывается на предварительно заданном воздушно-топливном отношении и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения. Способ может дополнительно содержать определение скорректированной передаточной функции «ток накачки / воздушно-топливное отношение» путем применения найденного смещения к известной передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения и оценивание воздушно-топливного отношения на основе выходной величины скорректированной передаточной функции, когда входной величиной является измеренный ток накачки. Способ может дополнительно содержать продолжение оценивания воздушно-топливного отношения во время работы кислородного датчика отработавших газов при втором напряжении на основе изменений измеренного тока накачки относительно исходно измеренного тока накачки, где исходно измеренным током накачки является первый ток накачки, выдаваемый кислородным датчиком отработавших газов при переходе на работу в режиме с изменяемым напряжением, и при втором напряжении. Первые условия работы двигателя включают в себя один или более следующих параметров: влажность окружающего воздуха, содержание воды в отработавшем газе, подаваемое количество вторичной жидкости и содержание этанола в топливе.
Согласно одному варианту осуществления, система для двигателя может содержать: кислородный датчик отработавших газов, расположенный в выпускном канале двигателя; и контроллер с машинно-читаемыми инструкциями для: во время действия первых условий, когда кислородный датчик отработавших газов работает при базовом опорном напряжении, при котором не происходит диссоциации молекул воды - оценивания первого воздушно-топливного отношения в отработавшем газе на основе первого выходного сигнала кислородного датчика отработавших газов и регулирования работы двигателя исходя из первого воздушно-топливного отношения; и во время действия вторых условий, когда кислородный датчик отработавших газов работает при втором опорном напряжении более высоком, чем базовое опорное напряжение, при котором имеет место диссоциация молекул воды - оценивания второго воздушно-топливного отношения в отработавшем газе на основе измеренного тока накачки, выдаваемого кислородным датчиком отработавших газов и находимого поправочного коэффициента, причем находимый поправочный коэффициент основывается на втором опорном напряжении и контрольном токе накачки. Система, соответствующая п. 17 формулы изобретения, отличается тем, что находимый поправочный коэффициент основывается на разности между исходно измеренным током накачки при переходе от первых условий ко вторым условиям и контрольным током накачки. Контрольный ток накачки представляет собой либо контрольный ток накачки, основанный на первом воздушно-топливном отношении и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения, либо контрольный ток накачки, основанный на предварительно заданном, контрольном воздушно-топливном отношении и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения. Предварительно заданное, контрольное воздушно-топливное отношение приблизительно равно единице.
На фиг 7 диаграммы 700 показывают, как может изменяться при различных условиях работы двигателя воздушно-топливное отношение, оцененное с использованием кислородного датчика отработавших газов (например, кислородного датчика 126 фиг. 1). График 702 показывает изменение опорного напряжения, приложенного к кислородному датчику, график 704 изображает изменения концентрации этанола в топливе, а график 706 изображает изменение количества топлива, подаваемого в цилиндры двигателя (например, в цилиндр 30). График 708 изображает изменения тока накачки - выходного сигнала кислородного датчика, а график 710 изображает изменения оцененного воздушно-топливного отношения в отработавшем газе. Как говорилось выше, опорное напряжение может представлять собой напряжение, приложенное к кислородному датчику посредством контроллера двигателя (например, контроллера 12). Изменения концентрации этанола в топливе могут возникать, когда для дозаправки двигателя используют топливную смесь с другим содержанием этанола. Количеством топлива, подаваемым в двигатель, также может управлять контроллер в зависимости от потребностей двигателя (нагрузки двигателя, оборотов двигателя, температуры двигателя, потока в контуре РОГ (EGR) и т.п.). Оцененное воздушно-топливное отношение представляет собой воздушно-топливное отношение, оцененное контроллером. Результаты оценивания воздушно-топливного отношения могут основываться на токе накачки на выходе кислородного датчика и передаточных функциях, связывающих токи накачки с воздушно-топливными отношениями для конкретных напряжений.
Перед моментом t1 времени опорное напряжение кислородного датчика находится на уровне более низкого, первого опорного напряжения V1. V1 может представлять собой опорное напряжение достаточно низкое, чтобы не происходило диссоциации молекул водяного пара и двуокиси углерода (например, 450 мВ). Кроме того, количество подаваемого топлива и концентрация этанола в топливе находятся на соответствующих более низких, первых уровнях F1 и Е1 . Как таковой, ток накачки, выдаваемый кислородным датчиком, находится на более низком, первом уровне C1, а оцененное воздушно-топливное отношение - на более высоком, первом уровне А2. В момент t1 опорное напряжение увеличивается от более низкого, первого уровня V1 до более высокого, второго уровня V2. V2 может представлять собой напряжение достаточно высокое, чтобы вызывать диссоциацию молекул паров воды и/или двуокиси углерода (например, 1100 мВ). Как говорилось в отношении фиг. 3, увеличение опорного напряжения, приложенного к кислородному датчику, может приводить к увеличению тока накачки, выдаваемого кислородным датчиком. Как таковой, измеренный ток накачки в момент t1 увеличивается от более низкого, первого уровня C1 до более высокого, второго уровня С3. Концентрация этанола в топливе и количество подаваемого топлива в момент t1 остаются на их соответствующих более низких, первых уровнях E1 и F1. Несмотря на увеличение тока накачки в момент t1, оцененное воздушно-топливное отношение может оставаться на том же самом более высоком первом уровне А2. В силу увеличения опорного напряжения, приложенного к кислородному датчику, контроллер может выбрать передаточную функцию, соответствующую более высокому, второму опорному напряжению V2. Таким образом, эта передаточная функция может быть использована для учета увеличения тока накачки в результате увеличения опорного напряжения в момент t1.
В момент t2 количество топлива, подаваемое в цилиндры двигателя, возрастает от более низкого, первого уровня F1 до более высокого, второго уровня F2. Опорное напряжение остается тем же самым на более высоком втором уровне V2, и, аналогичным образом, концентрация этанола в топливе остается на уровне E1. Из-за увеличения количества подаваемого топлива в момент t2 ток накачки, выдаваемый кислородным датчиком, может снизиться от более высокого второго уровня С3 до промежуточного, третьего уровня С2. С2 может быть больше, чем C1, но меньше, чем С3. Как говорилось ранее, ток накачки может быть непосредственно связан с концентрацией кислорода в отработавшем газе. Увеличение количества подаваемого топлива может привести к снижению концентрации кислорода в отработавшем газе, что может быть отражено в снижении тока накачки. В момент t2 контроллер может продолжить использовать передаточную функцию, соответствующую опорному напряжению V2, и таким образом может зарегистрировать снижение тока накачки, выдаваемого кислородным датчиком, как уменьшение воздушно-топливного отношения. Таким образом, в момент t2 оцененное воздушно-топливное отношение может уменьшиться от более высокого, первого уровня А2 до более низкого, второго уровня A1.
В момент t3 опорное напряжение может вернуться к более низкому, первому уровню V1 от более высокого, второго уровня V2. Одновременно, количество подаваемого топлива может уменьшиться от более высокого, второго уровня F2 до более низкого, первого уровня F1. Из-за снижения опорного напряжения обратно к уровню V1 ток накачки может уменьшиться от промежуточного, третьего уровня С2 до более низкого, первого уровня C1. В момент t3 контроллер может переключиться обратно на использование передаточной функции, соответствующей более низкому, первому опорному напряжению V1 вместо более высокого, второго напряжения V2. Как таковое, оцененное воздушно-топливное отношение может увеличиться от более низкого, второго уровня А1 обратно до более высокого, первого уровня А2. В момент t4 концентрация этанола в топливе может увеличиться от более низкого, первого уровня E1 до более высокого, второго уровня Е2. Однако, поскольку опорное напряжение остается на уровне V1, при котором не происходит диссоциации молекул воды и двуокиси углерода, увеличение концентрации этанола не влияет на ток накачки, выдаваемый кислородным датчиком. Таким образом, в момент t4 измеренный ток накачки остается на более низком, первом уровне C1. Как таковое, оцененное воздушно-топливное отношение остается на более высоком, первом уровне А2. Количество подаваемого топлива остается на более низком, первом уровне F1.
В момент t5 количество подаваемого топлива остается на более низком, первом уровне F1, а концентрация этанола в топливе остается на более высоком, втором уровне Е2. Однако, опорное напряжение кислородного датчика увеличивается от V1 до V2. Из-за увеличения опорного напряжения ток накачки в момент t5 может увеличиться. Однако, ток накачки может увеличиться от более низкого, первого уровня C1 до максимального, четвертого уровня С4, причем С4 может быть больше, чем С3. Это может быть из-за увеличения концентрации этанола в топливе. Как говорилось ранее в отношении фиг. 4, увеличение концентрации этанола в топливе может приводить к увеличению тока накачки, когда кислородный датчик работает при опорном напряжении достаточно высоком, чтобы вызывать диссоциацию молекул паров воды и двуокиси углерода. Из-за того, что в момент t5 кислородный датчик работает при более высоком, втором опорном напряжении V2, концентрация этанола в топливе оказывает влияние на выходной сигнал кислородного датчика. Поэтому, в силу увеличения концентрации этанола от Е1 до Е2, измеренный ток накачки в момент t5 увеличивается от C1 до С4. Таким образом, увеличение тока накачки в момент t5 больше, чем увеличение тока накачки в момент t1 из-за увеличения концентрации этанола в топливе от Е1 до Е2. В момент t5 контроллер для оценивания воздушно-топливного отношения может использовать передаточную функцию, соответствующую более высокому, второму напряжению V2. Однако, без поправки на увеличение концентрации этанола от E1 до Е2 результат оценивания воздушно-топливного отношения контроллером может быть больше, чем первый более высокий уровень А2. Чтобы сделать поправку на увеличение концентрации этанола, контроллер может определить смещение Ip в момент t5, как это подробно рассматривалось согласно фиг. 5. Путем сравнения измеренного тока накачки, выдаваемого кислородным датчиком, с контрольным током накачки контроллер может определить смещение Ip. Смещение Ip может затем быть использовано для коррекции оцененных значений воздушно-топливного отношения. Согласно одному примеру, это может заключаться в сдвиге передаточной функции, соответствующей V2. Согласно другому примеру, смещение Ip может быть использовано для коррекции результатов измерения тока накачки, так, чтобы они подходили к передаточной функции, соответствующей V2.
На ток накачки, выдаваемый кислородным датчиком, могут влиять изменения количества топлива, подаваемого в цилиндры двигателя, концентрации этанола в топливе, и изменения опорного напряжения, прикладываемого к кислородному датчику. Более конкретно, увеличение опорного напряжения может вызывать увеличение тока накачки. Однако, увеличение количества подаваемого топлива может вызывать уменьшение тока накачки. На ток накачки может влиять только концентрация этанола в топливе, когда датчик работает при напряжении достаточно высоком, чтобы происходила диссоциация молекул водяного пара и двуокиси углерода. При работе при напряжении достаточно высоком, чтобы происходила диссоциация молекул водяного пара и двуокиси углерода, ток накачки, выдаваемый кислородным датчиком, может увеличиваться в ответ на увеличение концентрации этанола в топливе. Однако, на фактическое воздушно-топливное отношение в отработавшем газе может влиять только количество топлива, подаваемого в цилиндры двигателя. Более конкретно, увеличение количества подаваемого топлива может приводить к уменьшению воздушно-топливного отношения. Таким образом, изменения концентрации этанола в топливе и опорного напряжения кислородного датчика фактически не могут влиять на воздушно-топливное отношение. Следовательно, результаты оценки воздушно-топливного отношения основанного на токе накачки, выдаваемом кислородным датчиком, могут быть искажены, когда изменяется опорное напряжение кислородного датчика или концентрация этанола в топливе. Таким образом, чтобы учесть изменения тока накачки, которые не соответствуют фактическим изменениям воздушно-топливного отношения, контроллер применяет несколько находимых поправочных коэффициентов, чтобы увеличить точность оценок воздушно-топливного отношения. Чтобы учесть изменения тока накачки, вызванные изменениями опорного напряжения, контроллер может выбрать передаточную функцию, соответствующую опорному напряжению, при котором в текущий момент времени работает кислородный датчик. Если ток накачки изменяется из-за изменений концентрации этанола в топливе, когда кислородный датчик работает при напряжении достаточно высоком, чтобы вызывать диссоциацию молекул водяного пара или двуокиси углерода, контроллер может найти смещение Ip. Это смещение Ip может быть использовано либо для коррекции последующих выходных сигналов кислородного датчика, либо для коррекции передаточной функции, которая используется для оценивания воздушно-топливного отношения при опорном напряжении, которое действует в текущий момент времени.
Таким образом, рассмотренные в настоящем описании системы и способ могут увеличить точность результатов оценивания воздушно-топливного отношения при работе кислородного датчика отработавших газов в режиме с изменяемым напряжением, при котором датчик перестраивают между более низким, первым напряжением и более высоким, вторым напряжением. Более конкретно, точность измерения воздушно-топливного отношения может быть увеличена, когда кислородный датчик работает при опорном напряжении достаточно высоком, чтобы вызывать диссоциацию молекул водяного пара и/или двуокиси углерода. Кислородный датчик можно перестраивать между более низким, первым напряжением, при котором диссоциации молекул воды и двуокиси углерода не происходит, и более высоким, вторым напряжением, при котором имеет место диссоциация молекул паров воды и дополнительно двуокиси углерода. Когда датчик работает при более высоком, втором напряжении, выходные сигналы кислородного датчика в форме тока накачки (Ip) могут становиться искаженными из-за того вклада в концентрацию кислорода, который вносят диссоциированные молекулы водяного пара и/или двуокиси углерода. Оценивать воздушно-топливное отношение можно путем сравнения тока накачки кислородного датчика с выходным сигналом кислородного датчика в условиях работы без подачи топлива, как например в режиме ОТЗ (DFSO). Таким образом, на точность оценки воздушно-топливного отношения может влиять точность кислородного датчика. Как таковая, точность оценки воздушно-топливного отношения может быть снижена, когда кислородный датчик работает при более высоком, втором опорном напряжении. Для учета изменений тока накачки кислородного датчика при работе при втором опорном напряжении может быть найдено первое смещение. Однако, вклад от водяных паров и/или двуокиси углерода в выходной сигнал кислородного датчика может меняться в зависимости от влажности окружающего воздуха и концентрации этанола в топливе. Как таковая, точность оценки воздушно-топливного отношения может быть снижена из-за изменений влажности окружающего воздуха и/или концентрации этанола в топливе.
Однако, для учета изменений тока накачки кислородного датчика, вызванных изменениями влажности окружающего воздуха и концентрации этанола в топливе, может быть найдено второе смещение. Таким образом, технический эффект, заключающийся в увеличении точности оценки воздушно-топливного отношения достигается во время работы кислородного датчика отработавших газов в режиме с изменяемым напряжением путем сравнения контрольного тока накачки кислородного датчика с измеренным током накачки, и определения смещения на основе отклонения данного тока накачки от контрольного тока накачки. Более конкретно, контрольный ток накачки может быть определен на основе результата самой недавней оценки воздушно-топливного отношения, когда кислородный датчик не работал в режиме с изменяемым напряжением, а напротив работал при напряжении достаточно низком, чтобы не происходило диссоциации молекул паров воды и/или двуокиси углерода. В ином варианте, контрольный ток накачки может быть определен на основе предварительно заданного тока накачки. Затем может быть произведено сравнение контрольного тока накачки с током накачки, измеренным, когда кислородный датчик работает при напряжении достаточно высоком, чтобы вызывать диссоциацию молекул паров воды и/или двуокиси углерода. На основе отклонения измеренного тока накачки от контрольного тока накачки может быть определено смещение Ip. Смещение Ip затем может быть использовано для оценивания воздушно-топливного отношения. Согласно одному примеру, смещение Ip может производить коррекцию известной передаточной функции, которая связывает токи накачки с воздушно-топливными отношениями, для более высокого, второго опорного напряжения кислородного датчика. Воздушно-топливное отношение затем может быть оценено на основе воздушно-топливного отношения, соответствующего точке на скорректированной передаточной функции, которую определяет измеренный ток накачки. Согласно другому примеру, смещение Ip может производить коррекцию измеренного тока накачки до точки на известной передаточной функции, которая связывает токи накачки с воздушно-топливными отношениями, при условиях влажности и концентрации этанола в топливе, соответствующих базовому уровню. Базовый уровень условий влажности и концентрации этанола в топливе может быть определен, когда обе указанные величины составляют 0%.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти, и могут быть реализованы посредством управляющей системы, содержащей контроллер в сочетании с различными датчиками, исполнительными органами и прочими аппаратными устройствами двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемых событиями, управляемых прерываниями, многозадачных, многопотоковых и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машинно-читаемого носителя данных в системе управления двигателем; при этом описанные действия выполняются путем исполнения инструкций в системе, содержащей различные аппаратные элементы в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема от идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ КИСЛОРОДНЫМ ДАТЧИКОМ РЕГУЛИРУЕМОГО НАПРЯЖЕНИЯ | 2015 |
|
RU2702068C2 |
| Способ (варианты) и система для эксплуатации датчика отработавших газов с переменным напряжением в двигателе внутреннего сгорания | 2016 |
|
RU2717188C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ЭТАНОЛА В ТОПЛИВЕ ПРИ ПОМОЩИ ДАТЧИКА КИСЛОРОДА (ВАРИАНТЫ) | 2015 |
|
RU2691275C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ НА ОСНОВЕ ОЦЕНКИ СОДЕРЖАНИЯ СПИРТА В ТОПЛИВЕ | 2016 |
|
RU2717478C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РАСЧЕТА ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ ПОСРЕДСТВОМ КИСЛОРОДНОГО ДАТЧИКА ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2691872C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ВЛАГИ В ОКРУЖАЮЩЕМ ВОЗДУХЕ ПОСРЕДСТВОМ ДАТЧИКА ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2665765C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОЦЕНКИ ВНЕШНЕГО ДАВЛЕНИЯ ПРИ ПОМОЩИ КИСЛОРОДНОГО ДАТЧИКА | 2016 |
|
RU2677915C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА АНТИДЕТОНАЦИОННОЙ ЖИДКОСТИ | 2016 |
|
RU2704371C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ ВОЗДУХА И НАЛИЧИЯ ПОТОКА ИЗ КАРТЕРА ПОСРЕДСТВОМ ДАТЧИКА ВЫХЛОПНОГО ГАЗА | 2014 |
|
RU2676831C2 |
| СПОСОБЫ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2014 |
|
RU2663678C2 |
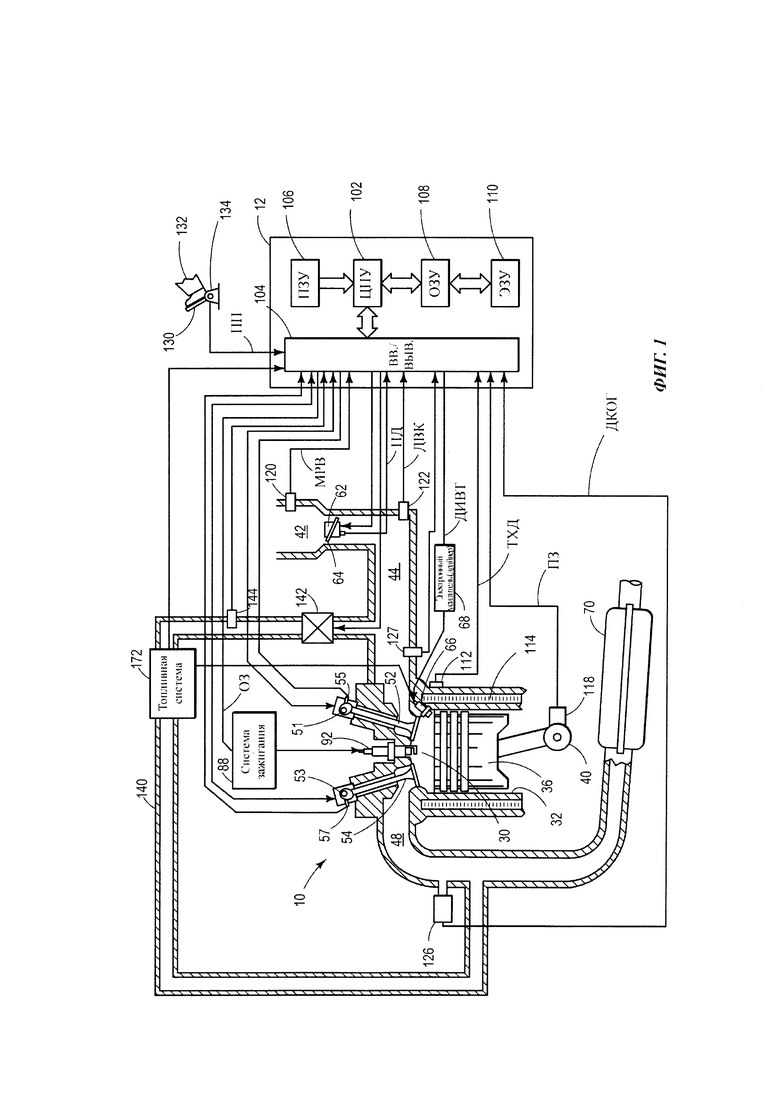
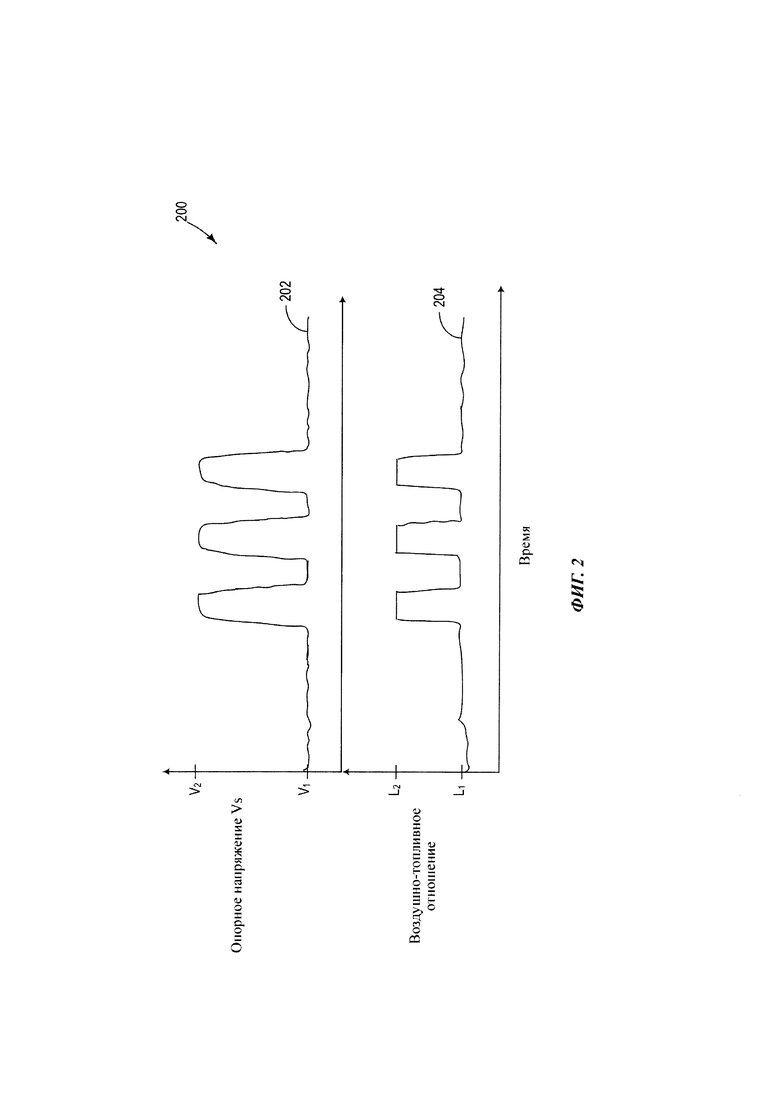
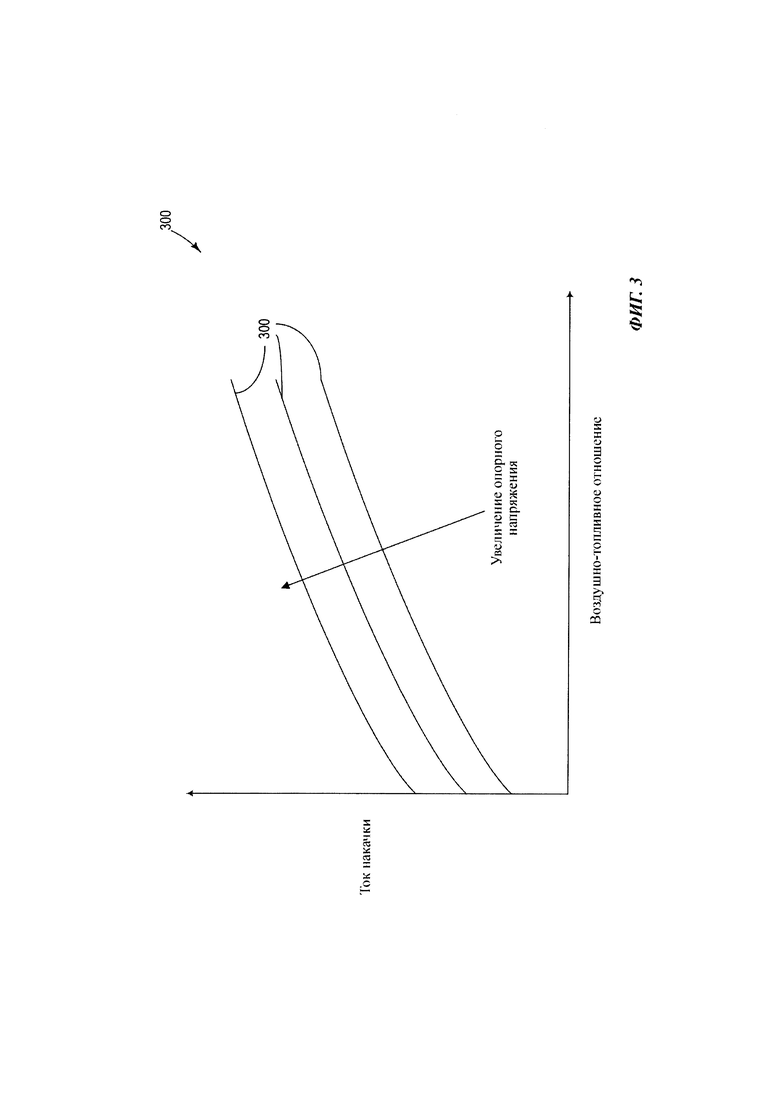
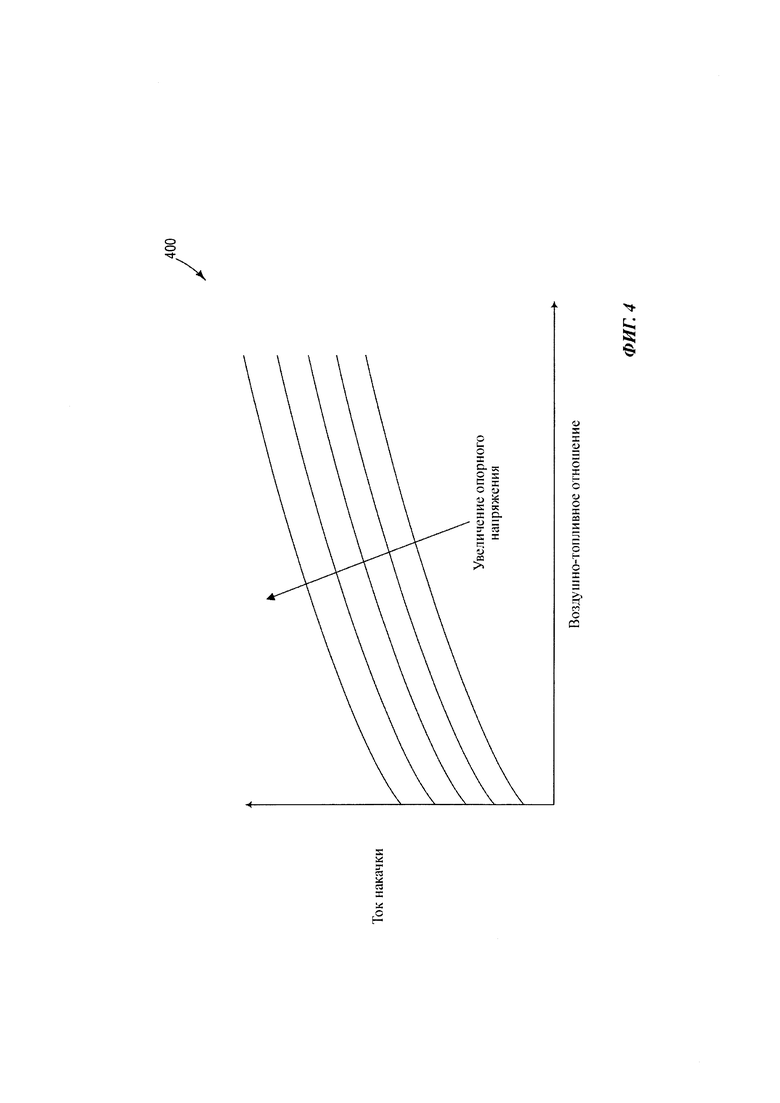
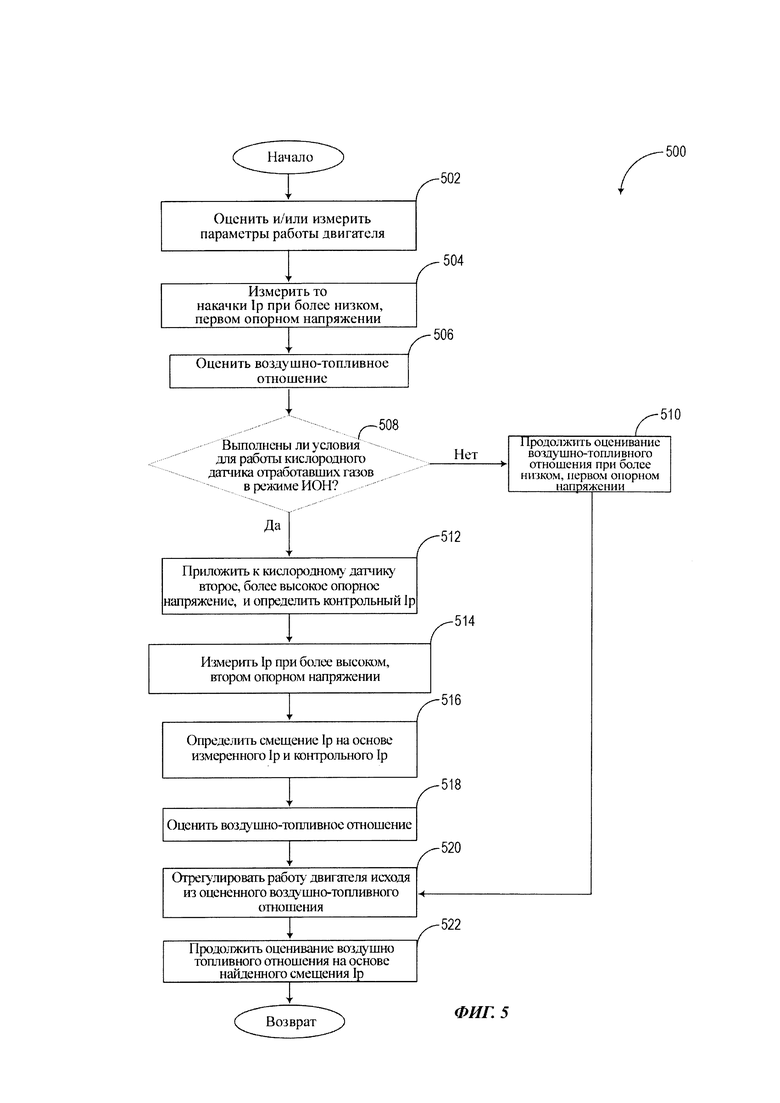
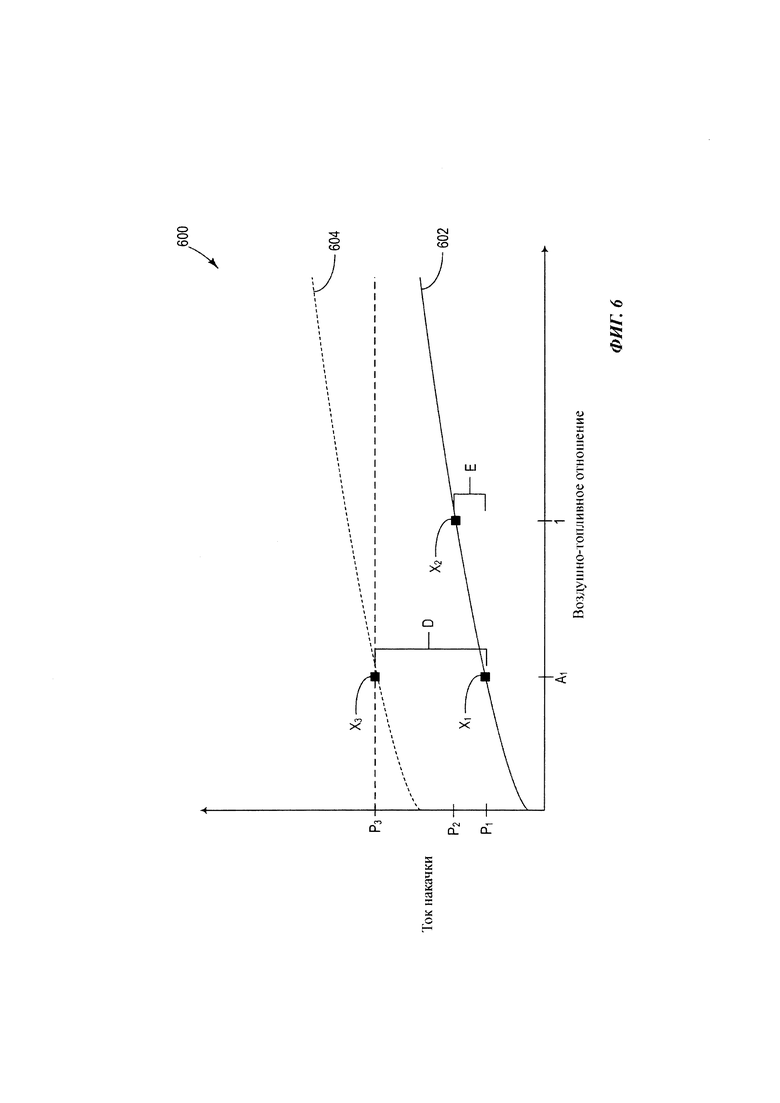
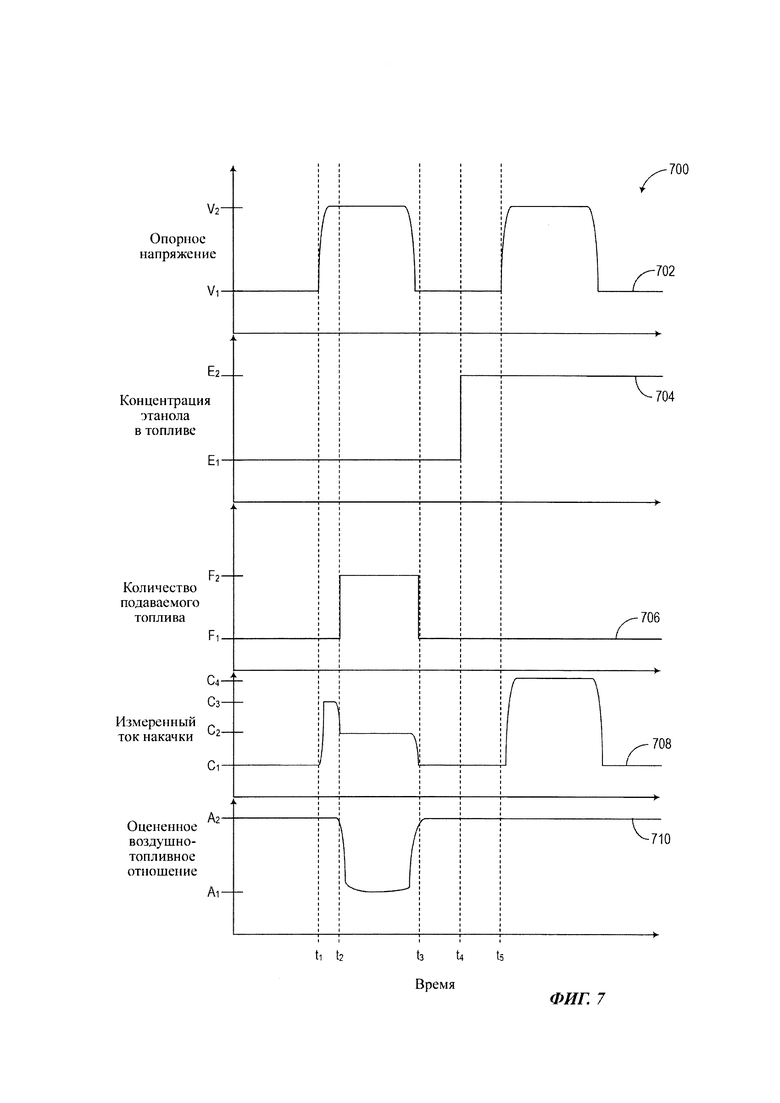
Изобретение в целом относится к способам и системы для измерения воздушно-топливного отношения на основе выходных сигналов кислородного датчика отработавших газов. Согласно одному примеру, способ может содержать регулирование работы двигателя исходя из воздушно-топливного отношения, оцениваемого на основе выходного сигнала кислородного датчика отработавших газов и находимого поправочного коэффициента. Например, кислородный датчик может работать в режиме с изменяемым напряжением, при котором опорное напряжение кислородного датчика можно изменять между более низким первым напряжением и более высоким вторым напряжением, при этом находимый поправочный коэффициент основывается на указанном втором напряжении. 3 н. и 17 з.п. ф-лы, 7 ил.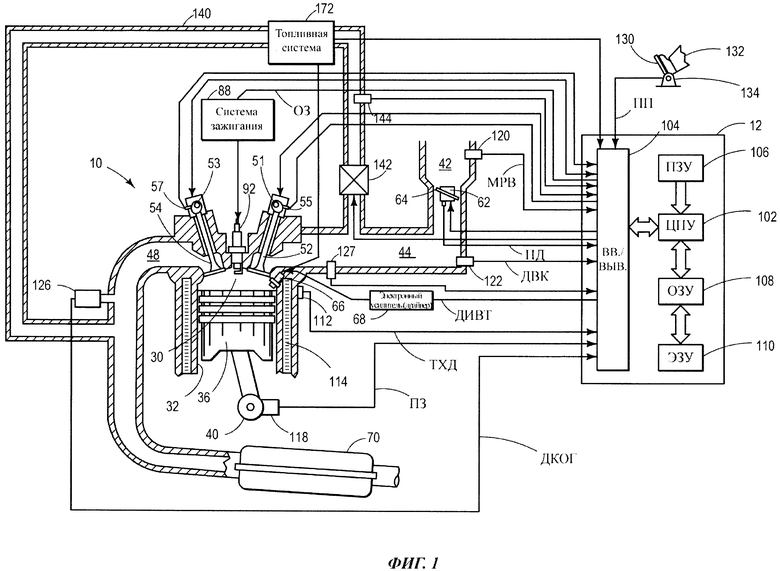
1. Способ управления двигателем, содержащий шаги, на которых:
во время работы кислородного датчика отработавших газов в режиме с изменяемым напряжением, в котором опорное напряжение кислородного датчика изменяют от более низкого первого напряжения до более высокого второго напряжения, регулируют работу двигателя исходя из воздушно-топливного отношения, измеренного на основе выходного сигнала кислородного датчика отработавших газов и находимого поправочного коэффициента, основанного на втором напряжении.
2. Способ по п. 1, отличающийся тем, что выходным сигналом кислородного датчика отработавших газов является ток накачки, в то время как кислородный датчик отработавших газов работает при втором напряжении.
3. Способ по п. 1, отличающийся тем, что находимый поправочный коэффициент дополнительно основан на ранее оцененном воздушно-топливном отношении при работе кислородного датчика отработавших газов в режиме с неизменяемым напряжением, при котором опорное напряжение поддерживают на уровне первого напряжения.
4. Способ по п. 3, отличающийся тем, что дополнительно определяют находимый поправочный коэффициент на основе начального тока накачки, выдаваемого кислородным датчиком отработавших газов при втором напряжении, передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения, и контрольного тока накачки, определяемого из передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения при ранее оцененном воздушно-топливном отношении.
5. Способ по п. 4, отличающийся тем, что определение находимого поправочного коэффициента дополнительно включает в себя следующие шаги:
выбирают передаточную функцию «ток накачки / воздушно-топливное отношение» из множества таких передаточных функций исходя из величины второго напряжения; и
корректируют выбранную передаточную функцию «ток накачки / воздушно-топливное отношение» на основе разности между начальным током накачки и контрольным током накачки, при этом для скорректированной передаточной функции входной величиной является выходной сигнал кислородного датчика отработавших газов, а выходной величиной - воздушно-топливное отношение.
6. Способ по п. 1, отличающийся тем, что дополнительно корректируют выходной сигнал кислородного датчика отработавших газов на основе находимого поправочного коэффициента и оценивают воздушно-топливное отношение во время работы при втором напряжении на основе скорректированного выходного сигнала и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения.
7. Способ по п. 1, отличающийся тем, что дополнительно определяют находимый поправочный коэффициент исходя из разности между начальным током накачки, выдаваемым кислородным датчиком отработавших газов при втором напряжении, и первым контрольным током накачки, основанным на предварительно заданном контрольном воздушно-топливном отношении, и разности между начальным током накачки и вторым контрольным током накачки, который определен из передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения при ранее оцененном воздушно-топливном отношении во время работы кислородного датчика отработавших газов в режиме с неизменяемым напряжением, при котором опорное напряжение поддерживают на уровне первого напряжения.
8. Способ по п. 1, отличающийся тем, что дополнительно во время работы кислородного датчика отработавших газов в режиме с изменяемым напряжением определяют дополнительный параметр работы двигателя исходя из первого выходного сигнала кислородного датчика отработавших газов при более низком, первом напряжении, и второго выходного сигнала кислородного датчика отработавших газов при более высоком, втором напряжении, при этом дополнительным параметром работы двигателя является один или более из следующих параметров: влажность окружающего воздуха, содержание воды в отработавшем газе, и содержание этанола в топливе.
9. Способ управления двигателем, содержащий шаги, на которых:
эксплуатируют кислородный датчик отработавших газов в режиме с изменяемым напряжением, при котором опорное напряжение кислородного датчика увеличивают от более низкого первого напряжения до более высокого второго напряжения, с целью определения первых условий работы двигателя; и
во время работы при втором напряжении корректируют выходной сигнал кислородного датчика отработавших газов на основе контрольного тока накачки при втором напряжении и оценивают воздушно-топливное отношение исходя из скорректированного выходного сигнала.
10. Способ по п. 9, отличающийся тем, что выходным сигналом кислородного датчика отработавших газов является измеряемый ток накачки.
11. Способ по п. 10, отличающийся тем, что коррекция выходного сигнала кислородного датчика отработавших газов на основе контрольного тока накачки включает в себя шаг, на котором сравнивают контрольный ток накачки с измеренным током накачки и определяют смещение на основе разности между измеренным током накачки и контрольным током накачки.
12. Способ по п. 11, отличающийся тем, что контрольный ток накачки основан на предыдущем воздушно-топливном отношении, оцененном, когда кислородный датчик отработавших газов работал в режиме с неизменяемым напряжением, до его работы в режиме с изменяемым напряжением, и на передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения.
13. Способ по п. 11, отличающийся тем, что контрольный ток накачки основан на предварительно заданном воздушно-топливном отношении и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения.
14. Способ по п. 11, отличающийся тем, что дополнительно определяют скорректированную передаточную функцию «ток накачки / воздушно-топливное отношение» путем применения найденного смещения к известной передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения и оценивают воздушно-топливное отношение на основе выходной величины скорректированной передаточной функции, когда входной величиной является измеренный ток накачки.
15. Способ по п. 10, отличающийся тем, что дополнительно продолжают оценивание воздушно-топливного отношения во время работы кислородного датчика отработавших газов при втором напряжении на основе изменений измеренного тока накачки относительно исходно измеренного тока накачки, где исходно измеренным током накачки является первый ток накачки, выдаваемый кислородным датчиком отработавших газов при переходе на работу в режиме с изменяемым напряжением, и при втором напряжении.
16. Способ по п. 9, отличающийся тем, что первые условия работы двигателя включают в себя один или более следующих параметров: влажность окружающего воздуха, содержание воды в отработавшем газе, подаваемое количество вторичной жидкости и содержание этанола в топливе.
17. Система для управления двигателем, содержащая:
кислородный датчик отработавших газов, расположенный в выпускном канале двигателя; и
контроллер с машинно-читаемыми инструкциями для:
во время действия первых условий, когда кислородный датчик отработавших газов работает при базовом опорном напряжении, при котором не происходит диссоциации молекул воды, - оценивания первого воздушно-топливного отношения в отработавших газах на основе первого выходного сигнала кислородного датчика отработавших газов и регулирования работы двигателя исходя из первого воздушно-топливного отношения в отработавших газах; и
во время действия вторых условий, когда кислородный датчик отработавших газов работает при втором опорном напряжении более высоком, чем базовое опорное напряжение, при котором имеет место диссоциация молекул воды, - оценивания второго воздушно-топливного отношения в отработавших газах на основе измеренного тока накачки, выдаваемого кислородным датчиком отработавших газов, и находимого поправочного коэффициента, причем находимый поправочный коэффициент основан на втором опорном напряжении и контрольном токе накачки.
18. Система по п. 17, отличающаяся тем, что находимый поправочный коэффициент основан на разности между исходно измеренным током накачки при переходе от первых условий ко вторым условиям и контрольным током накачки.
19. Система по п. 17, отличающаяся тем, что контрольный ток накачки представляет собой либо контрольный ток накачки, основанный на первом воздушно-топливном отношении и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения, либо контрольный ток накачки, основанный на предварительно заданном, контрольном воздушно-топливном отношении и передаточной функции «ток накачки / воздушно-топливное отношение» для второго напряжения.
20. Система по п. 19, отличающаяся тем, что предварительно заданное, контрольное воздушно-топливное отношение приблизительно равно единице.
| Устройство для изготовления и запрессовки проволочных штырьков в изоляционные монтажные платы | 1960 |
|
SU140108A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ОТРАБОТАВШИХ ГАЗОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2400638C1 |
| US 20130333677 A1, 19.12.2013 | |||
| US 20110132340 A1, 09.06.2011 | |||
| US 20100236532 A1, 23.09.2010. | |||

