Изобретение относится к освоению подводных месторождений полезных ископаемых, преимущественно жидких и газообразных, с помощью комплекса технологического оборудования, часть которого размещают на дне, для обеспечения проведения, например, нефтегазопромысловых работ на глубоководном шельфе открытого моря. Изобретение может быть применено при разработке способов освоения природных ресурсов Мирового океана.
Для избежания воздействия на комплекс для добычи полезных ископаемых ледовых, штормовых и прочих нагрузок, снижения объема работ на строительство фундаментов и опорных конструкций, сокращения сроков возведения, повышения мобильности, применяют метод освоения месторождений при расположении части оборудования на дне. Для перемещения добытых ископаемых, извлекаемых из подводного месторождения, особенно в ледовых условиях арктических морей, используют транспортные системы.
Задачей настоящего изобретения является организация доставки добытых ископаемых, извлекаемых из глубоководного месторождения, при снижении стоимости капитальных и эксплуатационных затрат на обустройство морских глубоководных нефтегазовых месторождений.
Известен способ глубоководного производства промысловых работ (патент US 8794710, публ. 05.08.2014). Способ осуществляют с помощью производственного комплекса, выполненного с подводной и надводной частями. Подводная часть включает оборудование для добычи полезных ископаемых, стационарный подводный модуль для временного хранения добытых полезных ископаемых, которые собирают в контейнеры для транспортировки их со дна на поверхность моря. Кроме того, подводный модуль включает средства обеспечения плавучести контейнерам. Надводная часть включает сопровождаемое модуль и связанное с ним плавсредство. Способ включает установку на требуемой глубине стационарного подводного модуля, связанного с надводным плавсредством, добычу и сбор в контейнеры подводного модуля добытых полезных ископаемых, отделение контейнеров от подводного модуля и подъем их на поверхность, на сопровождаемое платформу плавсредство, с последующей разгрузкой добытых полезных ископаемых. Подъем контейнеров с добытыми полезными ископаемыми осуществляют устройством изменения его плавучести путем придания контейнерам движущей силы - плавучести. Устройство изменения плавучести представляет собой объем, связанный с контейнером и заполненный средой (льдом, жидкостью или другим телом), плотность которой меньше плотности морской воды. Текучая среда подается с плавсредства через линии связи его с подводным модулем. При использовании льда замораживают воду после заполнения объема. За счет использования этого объема контейнеры могут свободно всплыть на поверхность, либо быть доставлены на поверхность с помощью троса или другого средства, если этого объема недостаточно для свободного всплытия.
Недостатком этого способа является большая стоимость затрат на возведение сооружений и выполнение промысловых работ, сложность эксплуатации, трудоемкость и большие энергозатраты. Кроме того, по завершению разработки месторождения утилизация стационарного модуля (тем более в подводном исполнении) представляет собой определенные трудности и затраты на его демонтаж могут оказаться весьма высокими.
Известен другой способ производства промысловых работ с помощью производственного комплекса, включающего надводную часть - судно и мобильную подводную часть - самоходный подводный модуль для сбора полезных ископаемых, с автономным приводом, связанным с судном кабелями управления (Кронин Д. Подводные минеральные месторождения, М. Мир, 1983, с. 348-353). Самоходный модуль поддерживается тросами с судна и снабжен съемным контейнером-сборником с подъемным устройством для регулировки плавучести, оборудованным источником наполнения газом. Способ включает спуск контейнера-сборника на подводный модуль, управляемый с судна, сбор полезных ископаемых путем драгирования дна и погрузки их с помощью транспортера в контейнер-сборник, после наполнения которого по сигналу датчика груза на контейнере-сборнике останавливают модуль и снимают с него контейнер-сборник, затем надувают подъемное устройство газом для создания подъемной силы, поднимают с помощью этого устройства контейнер-сборник с полезными ископаемыми на поверхность, на судно, осуществляют разгрузку контейнера и опускают его обратно к модулю на морское дно для его нового наполнения.
Недостаток такого способа связан с тем, что при наличии рыхлого, мягкого грунта большие давления движущегося по дну модуля с добытыми полезными ископаемыми, особенно по неровной и загроможденной поверхности, потребует повышенной мощности для преодоления сопротивления движению, а изломы поверхности дна могут оказаться непреодолимыми для него. Кроме того, при добыче на больших глубинах (тысячи метров) вес поддерживающих тросов и кабелей управления с судна оказывается настолько большим, что становится трудным и даже проблематичным обеспечение их прочности, особенно в условиях волнения на поверхности океана, когда судно-носитель имеет вертикальные перемещения, что создает дополнительную динамическую нагрузку на них, повышая опасность разрыва тросов и кабелей.
В качестве ближайшего аналога выбран способ производства промысловых работ с помощью производственного комплекса, включающего надводную (судно) и мобильную подводную (самоходный подводный модуль для сбора полезных ископаемых с автономным приводом, управляемым по кабельным линиям связи с судна в виде самоходного шасси) части (патент RU 2053366, публик. 27.01.1996), который частично устраняет недостатки предыдущего аналога. Самоходный модуль поддерживается тросами с судна и снабжен съемным контейнером-сборником с подъемным устройством для регулировки плавучести, оборудованным источником наполнения его воздухом или газом и емкостью нулевой плавучести. Способ включает спуск контейнера-сборника за счет наполнения емкостей нулевой плавучести балластом на подводный модуль, управляемый с судна, сбор полезных ископаемых путем драгирования дна и погрузки их с помощью транспортера в контейнер-сборник. В отличие от предыдущего аналога в процессе движения подводного модуля по дну океана и наполнения контейнера-сборника осуществляют регулировку давления на грунт океана массой модуля путем наддува подъемного устройства контейнера-сборника, что позволяет существенно уменьшить сопротивление движению подводного модуля со стороны неровного и рыхлого грунта дна и преодолевать всякого рода изломы и неровности дна, что по сравнению с предыдущим аналогом приведет к снижению энергозатрат, потребляемых комплексом для работы. После наполнения контейнера по сигналу датчика груза на контейнере-сборнике останавливают модуль и додувают подъемное устройство воздухом или газом для создания подъемной силы, поднимают с помощью этого устройства контейнер-сборник с полезными ископаемыми на поверхность, на судно. В процессе подъема объем газа в подъемном устройстве расширяется и стравливается через обратный клапан сливного трубопровода контейнера-сборника. После поднятия осуществляют разгрузку контейнера, заполняют балластом емкость с нулевой плавучестью и опускают его обратно к модулю на морское дно для его нового наполнения.
Следует отметить, что способ, выбранный в качестве ближайшего аналога, не до конца решает проблему, связанную с большим давлением движущегося по дну модуля с добытыми полезными ископаемыми, особенно по неровной и загроможденной поверхности, т.к. меры принятые для регулировки давления недостаточны.
Технический результат заявляемого способа заключается в уменьшение трудоемкости и энергозатрат при добыче полезных ископаемых на больших глубинах.
Указанный технический результат достигается за счет того, что в способе производства промысловых работ на глубоководном шельфе, включающем спуск поддерживаемого тросом с надводного плавсредства подводного перемещаемого вдоль морского дна модуля с отделяемым контейнером для сбора полезных ископаемых, снабженного устройством изменения его плавучести и размещение их в рабочее положение путем балластировки конструкции, погрузку полезных ископаемых в контейнер, отделение контейнера от подводного модуля после его наполнения и подъем на сопровождаемое плавсредство путем изменения плавучести контейнера с последующей разгрузкой добытых полезных ископаемых, новым является то, что подводный модуль выполняют с переменной плавучестью в виде плота, состоящего из полых труб и снабжают натяжными опорами с балластным грузом, при этом плот размещают так, чтобы при эксплуатационном рабочем положение опоры не касались дна, осуществляя контроль натяжения опор с помощью датчиков определения натяжения, которыми снабжают натяжные опоры, и, в случае изменении внешних условий и давления на плот контейнера с полезными ископаемыми, осуществляют регулировку их натяжения с изменением плавучести, причем перемещение плота на другое место осуществляют, изменяя его плавучесть и используя поддерживающий трос, связывающий его с надводным плавсредством, и бортового привода, размещенного на плавсредстве.
Выполнение подводного модуля переменной плавучестью в виде плота, состоящего из полых труб и снабжение его натяжными опорами в виде балластного груза, при этом плот размещают так, чтобы при эксплуатационном рабочем положение опоры не касались дна, позволяет уменьшить массу системы управления плавучестью, давая возможность тем самым повысить полезную нагрузку, при этом конструктивно просто повысить маневренность при величине натяжения натяжных опор, соответствующего нулевому положению, что упрощает управление остаточной плавучестью, в том числе и в экстремальных условиях по параметрам окружающей воды.
Регулировка плавучести платформы и натяжения натяжных опор при ведении производственных процессов в случае изменения внешних условий, позволяет обеспечить устойчивость при различных неблагоприятных воздействиях.
Использование показаний датчиков определения натяжения, которыми снабжены натяжные опоры, позволяет оперативно определять в процессе работы параметры натяжения для проведения мероприятий, направленных на повышение устойчивости плота при изменяющихся внешних условиях и обстановки.
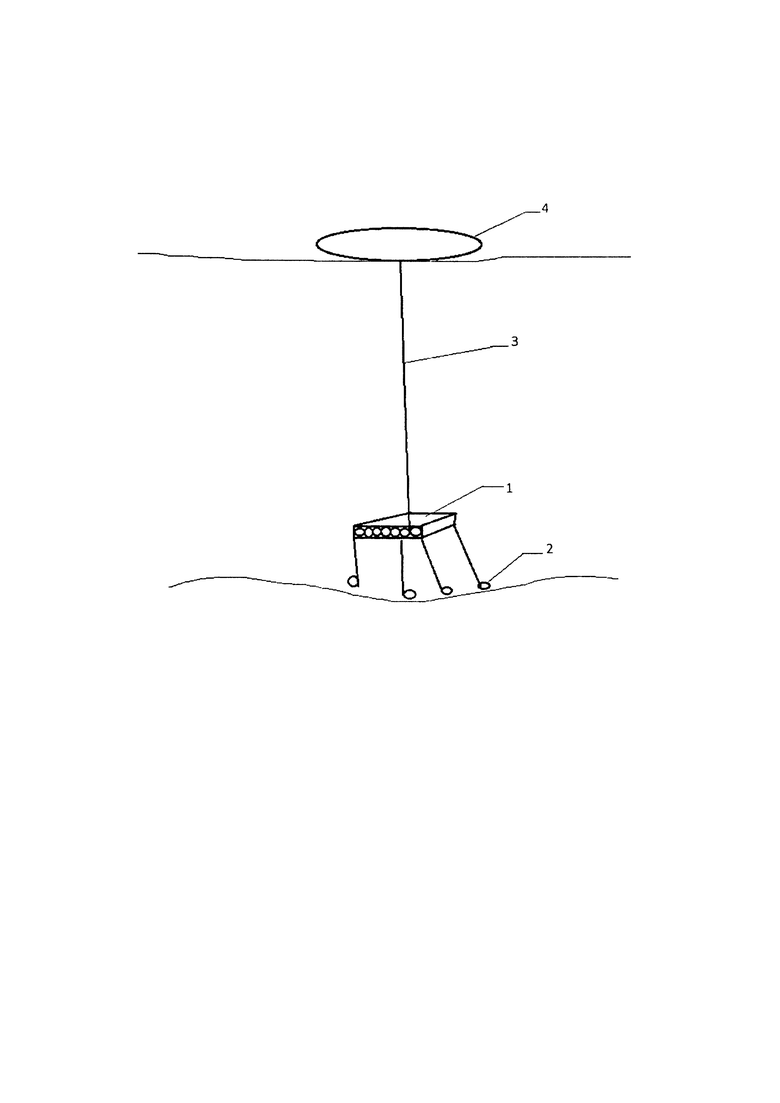
На фиг. приведена схема производственного комплекса для глубоководной добычи полезных ископаемых, где: 1 - плот; 2 - натяжные опоры; 3 - трос; 4 - транспортное судно.
Заявляемый способ может быть реализован с помощью производственного комплекса для проведения работ на глубоководном шельфе. Надводная часть включает транспортное судно. Подводная часть включает оборудование для добычи полезных ископаемых, плот с переменной плавучестью, который поддерживается тросом с надводным судном, и отделяемый контейнер для сбора и временного хранения добытых полезных ископаемых. Плот представляет собой облегченную конструкцию, собранную из полых труб и приспособленную для эксплуатации на сверхбольших глубинах. Плот в рабочем состоянии находится в толще воды, оснащен техническим оборудованием, назначение которого связано с выполняемыми производственными работами. Плот связан электрическими кабелями с надводным транспортным судном, которое в свою очередь снабжено приводом для приведения в движение троса. Плот снабжен натяжными опорами с балластным грузом. Натяжные опоры могут быть выполнены вертикальными и/или наклонными в виде многозвенных цепей, и/или канатов, и/или телескопических элементов, последние, например, так же, как в патенте RU 2581430 (публик. 20.04.2016). Балластные грузы не касаются грунта. Натяжные опоры снабжены датчиками для измерения силы натяжения, выполненными, например, по патенту на полезную модель RU 47517 (публик. 27.08.2005). Устройство управления плавучестью контейнеров может представлять собой объем, связанный с контейнером и заполненный средой, например, как в патенте US 8794710 (публ. 05.08.2014), или баллон с воздухом (патент US 4010560, публ.03.08.1977), баллон с газом (патент US 4336662, публик. 29.06.1982).
Способ эксплуатации производственного комплекса для проведения работ на глубоководном шельфе включает в себя следующие операции.
Осуществляют сборку плота 1 в конструкцию, снаряжают его контейнером, с устройством изменения плавучести, с натяжными опорами с балластным грузом 2.
Укомплектованный всем необходимым плот буксируется к заданной точке с помощью транспортного судна 4 и погружается с помощью бортового привода на требуемую глубину, поддерживаемый тросом 3.
Осуществляют позиционирование и установку в погруженном состоянии в рабочее положение, балластировки конструкции и последовательного натяжения натяжных опор. Натяжение и осадка плота могут регулироваться за счет балластировки при его установке и в процессе эксплуатации в зависимости от весовой нагрузки, внешних условий, сезона, уровня моря для оптимизации противодействия внешним нагрузкам.
Устройство управления плавучестью представляет собой набор конструктивных элементов, участвующих в создании определенной для разных режимов эксплуатации плавучести контейнера.. Отдельными модулями управления плавучести могут являться балластные водовытесняющие системы и водозаполняемые либо надувные эластичные элементы, участвующие в балластировке при установке плота. При эксплуатационном рабочем положение плота осуществляют контроль натяжения натяжных опор с помощью датчиков определения натяжения, которыми снабжают натяжные опоры, и, в случае изменении внешних условий, осуществляют регулировку их натяжения с изменением плавучести.
В процессе проведения работ при рабочем положении плота выполняют мероприятия, направленные на изменение плавучести в зависимости от показаний датчиков определения натяжения, которыми снабжены натяжные опоры.
После завершения работ осуществляют перемещение платформы на другое место.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ добычи железомарганцевых конкреций со дна океана с глубин до 5 км и более и устройство для его осуществления | 2019 |
|
RU2715108C1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ШЕЛЬФОВОЙ ЗОНЫ МИРОВОГО ОКЕАНА | 2006 |
|
RU2301338C1 |
| СПОСОБ РАЗРАБОТКИ УГЛЕВОДОРОДНЫХ МЕСТОРОЖДЕНИЙ АРКТИЧЕСКОГО ШЕЛЬФА И ТЕХНИЧЕСКИЕ РЕШЕНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2013 |
|
RU2529683C1 |
| СПОСОБ СЕЛЕКТИВНОГО ОТБОРА И ПРЕДВАРИТЕЛЬНОГО ОБОГАЩЕНИЯ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2375578C1 |
| ПОЛУПОГРУЖНАЯ БУРОВАЯ ПЛАТФОРМА КАТАМАРАННОГО ТИПА | 2012 |
|
RU2529098C2 |
| Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом | 2016 |
|
RU2640896C1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2006 |
|
RU2349489C2 |
| СПОСОБ СООРУЖЕНИЯ МОРСКОЙ ГЛУБОКОВОДНОЙ ПЛАТФОРМЫ | 2002 |
|
RU2229556C1 |
| ПОДВОДНЫЙ ДОБЫВАЮЩИЙ АППАРАТ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2371580C1 |
| СПОСОБ УСТАНОВКИ И ДЕМОНТАЖА ДОННОГО КОМПЛЕКСА ДЛЯ ВЫПОЛНЕНИЯ РАБОТ НА ШЕЛЬФЕ И КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381135C1 |
Изобретение относится к области подводной добычи полезных ископаемых. Предложен способ производства промысловых работ на глубоководном шельфе, включающий спуск поддерживаемого тросом с надводного плавсредства подводного перемещаемого вдоль морского дна модуля с отделяемым контейнером для сбора полезных ископаемых, снабженного устройством изменения его плавучести, и размещение их в рабочее положение путем балластировки конструкции, погрузку полезных ископаемых в контейнер, отделение контейнера от подводного модуля после его наполнения и подъем на сопровождаемое плавсредство путем изменения плавучести контейнера с последующей разгрузкой добытых полезных ископаемых, причем подводный модуль выполняют с переменной плавучестью в виде плота, состоящего из полых труб, и снабжают натяжными опорами в виде балластного груза, при этом плот размещают так, чтобы при эксплуатационном рабочем положении опоры не касались дна, осуществляя контроль натяжения опор с помощью датчиков определения натяжения, которыми снабжают натяжные опоры, и в случае изменения внешних условий и давления на плот контейнера с полезными ископаемыми осуществляют регулировку их натяжения с изменением плавучести, причем перемещение плота на другое место осуществляют, изменяя его плавучесть и используя поддерживающий трос, связывающий его с надводным плавсредством, и бортовой привод, размещенный на плавсредстве. Технический результат заключается в снижении трудоемкости и энергозатрат при добыче полезных ископаемых. 1 ил.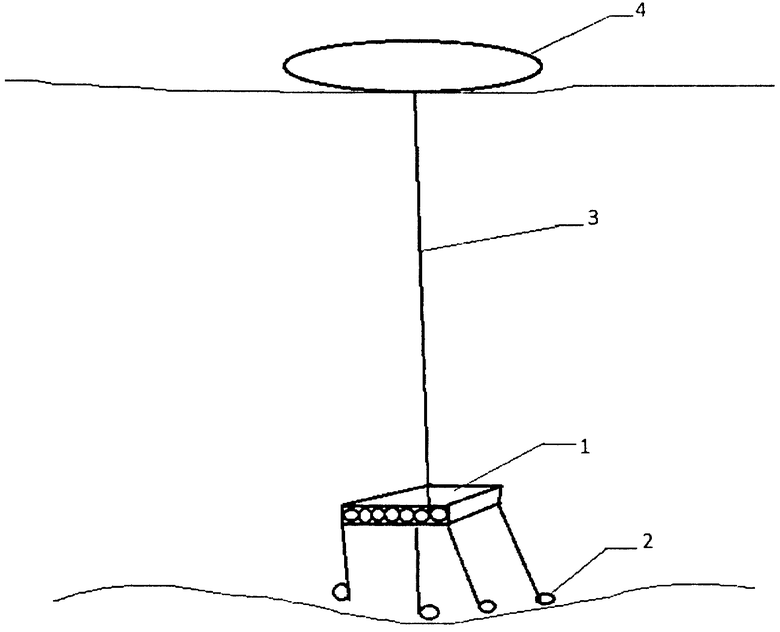
Способ производства промысловых работ на глубоководном шельфе, включающий спуск поддерживаемого тросом с надводного плавсредства подводного перемещаемого вдоль морского дна модуля с отделяемым контейнером для сбора полезных ископаемых, снабженного устройством изменения его плавучести, и размещение их в рабочее положение путем балластировки конструкции, погрузку полезных ископаемых в контейнер, отделение контейнера от подводного модуля после его наполнения и подъем на сопровождаемое плавсредство путем изменения плавучести контейнера с последующей разгрузкой добытых полезных ископаемых, отличающийся тем, что подводный модуль выполняют с переменной плавучестью в виде плота, состоящего из полых труб, и снабжают натяжными опорами в виде балластного груза, при этом плот размещают так, чтобы при эксплуатационном рабочем положении опоры не касались дна, осуществляя контроль натяжения опор с помощью датчиков определения натяжения, которыми снабжают натяжные опоры, и в случае изменения внешних условий и давления на плот контейнера с полезными ископаемыми осуществляют регулировку их натяжения с изменением плавучести, причем перемещение плота на другое место осуществляют, изменяя его плавучесть и используя поддерживающий трос, связывающий его с надводным плавсредством, и бортовой привод, размещенный на плавсредстве.
| СПОСОБ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ СО ДНА ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2053366C1 |
| US 8794710 B2, 05.08.2014 | |||
| Установка для добычи магнитных конкреций со дна моря | 1990 |
|
SU1810551A1 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА ОКЕАНА | 1990 |
|
SU1714991A1 |
| КОМПЛЕКС ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ ФОРМАЦИЙ | 1999 |
|
RU2151872C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2010 |
|
RU2426883C1 |
| DE 4039473 A1, 17.06.1992 | |||
| US 4010560 A, 08.03.1977. | |||

