Изобретение относится к гидроакустике, а именно к устройствам регистрации акустических сигналов и может быть использовано для обнаружения, определения местонахождения и классификации движущихся подводных объектов.
Наиболее близким по технической сущности к заявленному изобретению является радиогидроакустический буй на микроконтроллерах (Патент №2659347 RU, МПК В63В 22/00 от 29.06.2018 г.), который выбран в качестве прототипа. Прототип содержит последовательно соединенные гидроакустическую антенну (гидрофон), предварительный усилитель, измерительный блок на микроконтроллере, связанный по входу с выходом предварительного усилителя и реализующий функции управления и цифровой фильтрации, и блок радиопередающих трактов (РПТ), включающий n РПТ всплывающего типа, каждый из которых связан с измерительным блоком через последовательный интерфейс; при этом в состав каждого РПТ включены последовательно соединенные микросхема памяти, микроконтроллер, реализующий функции управления и цифроаналогового преобразования, и радиопередатчик, осуществляющий передачу шумовых сигналов от цели на носитель, а также устройство самоликвидации.
Однако основными недостатками буя на микроконтроллерах являются:
 сложность конструкции буя, имеющего в составе n РПТ всплывающего типа;
сложность конструкции буя, имеющего в составе n РПТ всплывающего типа;
 отсутствие блока звукоподводной связи (ЗПС), что делает не возможным связь между отдельными РГБ в барьере РГБ и исключает возможность подавления шума путем реализации алгоритмов адаптивной фильтрации.
отсутствие блока звукоподводной связи (ЗПС), что делает не возможным связь между отдельными РГБ в барьере РГБ и исключает возможность подавления шума путем реализации алгоритмов адаптивной фильтрации.
На устранение указанных недостатков направлено новое техническое решение «Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи», технической задачей которого является:
- упрощение конструкции буя за счет обеспечения возможности передачи отсчетов сигнала от цели на надводный ретранслятор через звукоподводный канал;
- обеспечение связи между отдельными РГБ в барьере путем их объединения в звукоподводную локальную вычислительную сеть (ЛВС).
Указанный технический результат достигается тем, что создано новое устройство- радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи, содержащий последовательно соединенные гидроакустическую антенну (гидрофон), предварительный усилитель, измерительный блок на микроконтроллере, связанный по входу с выходом предварительного усилителя. Принципиальным отличием от прототипа является то, что дополнительно введен блок звукоподводной связи (ЗПС), связанный с измерительным блоком через последовательный интерфейс и включающий микросхему памяти FlashROM, содержащую отсчеты сигнала от цели, микросхему Ethernet- адаптера, предназначенную для приведения передаваемых по сети данных к формату кадра Ethernet, и модем, осуществляющий подключение буя к звукоподводной локальной вычислительной сети.
Дополнительное введение блока звукоподводной связи, имеющего в своем составе модем, позволяет объединить буи в локальную вычислительную сеть, в результате появляется возможность подавления шума путем реализации алгоритмов адаптивной фильтрации.
Сущность изобретения поясняется чертежами:
Фигура 1. Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи. Функциональная схема.
Фигура 2. Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи. Принципиальная электрическая схема.
Фигура 3. Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи. Алгоритм работы буя.
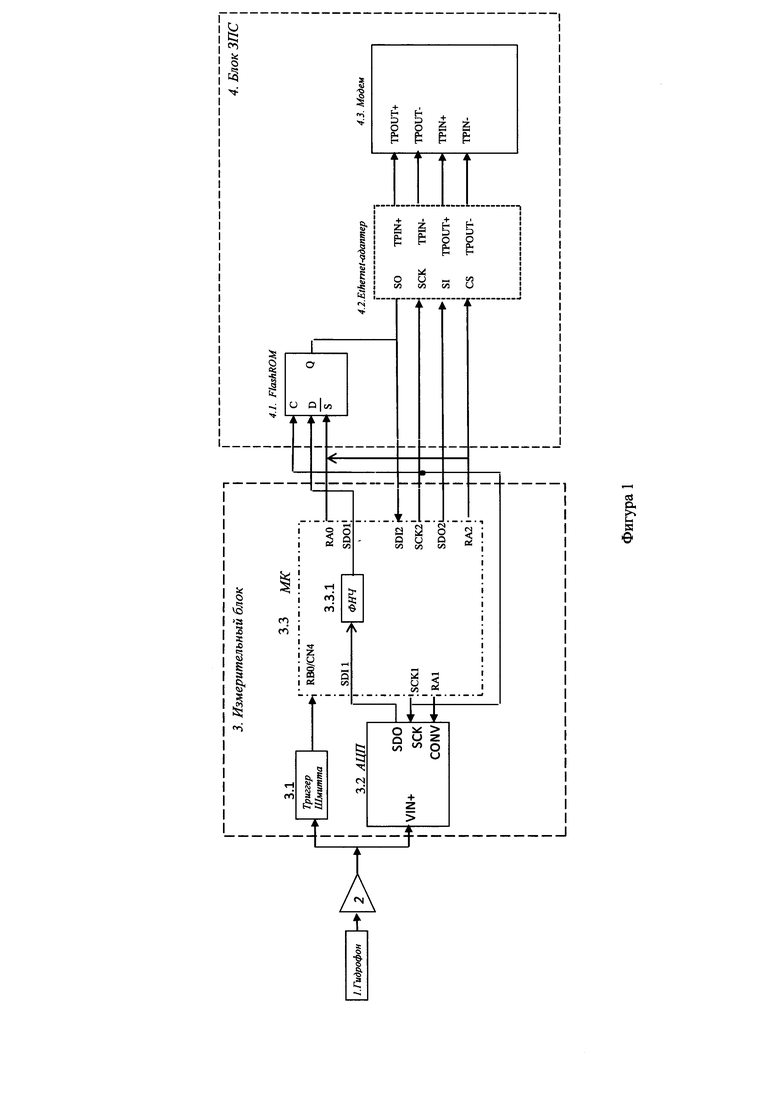
На Фигуре 1 представлена функциональная схема радиогидроакустического буя на микроконтроллере с блоком звукоподводной связи:
1. Гидроакустическая антенна (гидрофон).
2. Предварительный усилитель.
3. Измерительный блок:
3.1. Триггер Шмитта
3.2. Аналого-цифровой преобразователь (АЦП)
3.3 Микроконтроллер (МК):
3.3.1. Фильтр нижних частот (ФНЧ).
4. Блок звукоподводной связи (ЗПС):
4.1. Микросхема памяти FlashROM.
4.2. Ethernet-адаптер.
4.3. Модем.
Все конструктивные элементы буя связаны между собой электрическими связями.
Выход гидрофона 1 связан с входом предварительного усилителя 2. Выход предварительного усилителя 2 связан с установочным входом триггера Шмитта 3.1 и аналоговым входом VIN+ АЦП 3.2 измерительного блока 3. Выход триггера Шмитта 3.1 связан с входом RB0/CN4 микроконтроллера 3.3 измерительного блока 3, по которому организовано прерывание по перепаду напряжения. АЦП 3.2 связан с МК 3.3 измерительного блока 3 через последовательный интерфейс (модуль) SPI1 с использованием трех выводов МК 3.3: последовательный цифровой выход данных SDO связан с последовательным входом данных SDI1 модуля SPI1, вход тактирования SCK АЦП 3.2 связан с выходом тактирования SCK1, вход разрешения (запрещения) преобразования CONV связан с выходом RA1 МК 3.3, на котором программно формируется Лог. 0 для разрешения преобразования или Лог. 1 для разрешения передачи результата преобразования.
Результаты преобразования из выходного регистра АЦП 3.2 измерительного блока 3 последовательным кодом с использованием интерфейса SPI1 передаются в блок ЗПС 4 и записываются в микросхему памяти FlashROM 4.1, которая связана с МК 3.3 измерительного блока 3 следующим образом: вход тактирования С, соединен с выходом тактирования SCK1 модуля SPI1 МК 3.3, вход D соединен с последовательным выходом данных SDO1 модуля SPI1 МК 3.3, вход выбора микросхемы S соединен с выходом RA0 параллельного порта portА МК 3.3, на котором программно формируется Лог. 0 для разрешения записи.
Микросхема памяти FlashROM 4.1 блока ЗПС 4 связана с Ethernet-адаптером 4.2 посредством интерфейса SPI2 МК 3.3 измерительного блока 3 следующим образом: вход тактирования С, соединен с выходом тактирования SCK2 модуля SPI2 МК 3.3, выход Q соединен с последовательным входом данных SDI2 модуля SPI2 МК 3.3, последовательный выход данных SDO2 соединен с входом SI Ethernet-адаптера.
Вход выбора микросхемы FlashROM 4.1 блока ЗПС 4 S соединен с выходом RA2 параллельного порта portА МК 3.3 измерительного блока 3, на котором программно формируется Лог. 0 для разрешения чтения.
Микроконтроллер 3.3 измерительного блока 3 осуществляет чтение записанных данных из микросхемы FlashROM 4.1 блока ЗПС 4 и передачу их через интерфейс SPI2 на вход SI Ethernet-адаптера 4.2 блока ЗПС 4.
Микросхема Ethernet- адаптера 4.2 связана с микросхемой модема 4.3 блока ЗПС 4 следующим образом: выходы адаптера TPOUT+ и TPOUT- соединены с входами модема TPIN+ и TPIN- соответственно, входы адаптера TPIN+ и TPIN- соединены с выходами модема TPOUT+ и TPOUT- соответственно.
Ethernet-адаптер 4.2 блока ЗПС 4 осуществляет приведение данных к формату кадра Ethernet и передачу их на вход модема 4.3 блока ЗПС 4, который осуществляет передачу данных далее по звукоподводному каналу на надводный ретранслятор.
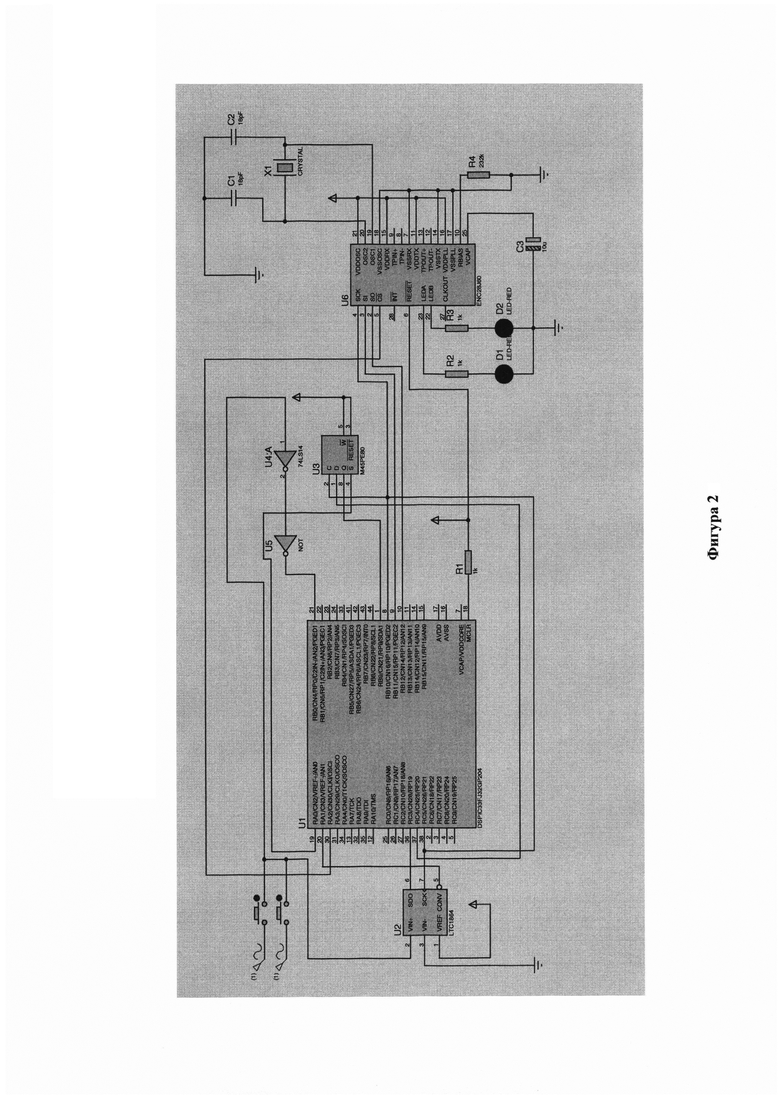
На Фигуре 2 приведена принципиальная электрическая схема измерительного блока 3 с микросхемами памяти и Ethernet-адаптера блока ЗПС 4. Данная схема используется для моделирования работы буя в программе Proteus. В состав схемы входят:
U1 - микроконтроллер dsPIC33FJ32GP204;
U2 - АЦП LTC1864;
U3 - микросхема FlashROM М45РЕ80;
U4.A - триггер Шмитта 74LS14;
U5 - логический элемент НЕ;
U6 - микросхема Ethernet- адаптера ENC28J60;
R1, R2, R3 - резисторы 1К;
R4 - резистор 232К;
X1 - кварцевый резонатор;
С1, С2 - конденсаторы 18pF;
С3 - конденсатор 10u.
Все элементы схемы соединены электрическими связями.
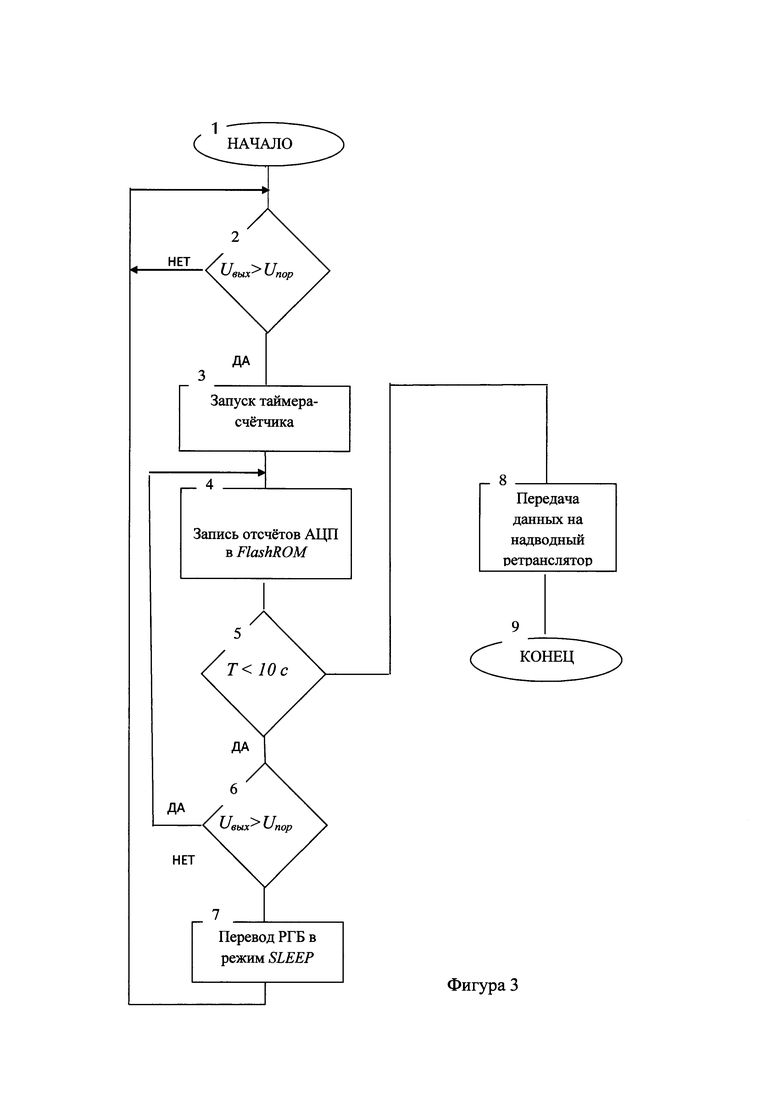
Напряжение на выходе предварительного усилителя буя, пропорциональное уровню зашумленного сигнала от цели, имитируется при помощи двух генераторов. Первый генератор- «Шум моря», второй - «Шум ПЛ». Генераторы подключаются к установочному входу 1 триггера Шмитта U4:A переключателями. Начальное состояние триггера - нулевое. Когда подключен только генератор «Шум моря», состояние триггера не изменяется. При подключении дополнительно генератора «Шум ПЛ», напряжение на входе 1 триггера U4:A превысит пороговое значение и произойдет переключение триггера в единичное состояние. На выходе триггера 2 будет сформирован отрицательный перепад напряжения, так как выход триггера инверсный. На выходе логического элемента НЕ U5 и на входе CN4 микроконтроллера U1 сформируется положительный перепад напряжения, являющийся запросом на прерывание. Запустится программа- обработчик прерывания, который инициализирует запись отсчетов АЦП U2 в микросхему FlashROM U3 через интерфейс SPI1 («Программа управления радиогидроакустическим буем на микроконтроллере». Свидетельство о регистрации №2017613161, дата государственной регистрации в реестре программ для ЭВМ 13.03.2017 г.). На Фигуре 3 приведен алгоритм работы радиогидроакустического буя на микроконтроллере с блоком ЗПС. Алгоритм включает следующие блоки:
Блок 1 - Начало алгоритма;
Блок 2 - Проверка условия «Уровень напряжения на выходе предварительного усилителя превышает пороговый уровень ?»;
Блок 3 - Запуск таймера счетчика для измерения интервала времени Т, в течении которого выполняется условие «UВЫХ>Uпор»;
Блок 4 - Запись отсчетов АЦП в память FlashROM блока ЗПС;
Блок 5 - Проверка условия Т < 10 с;
Блок 6 - Проверка условия UВЫХ>Uпор;
Блок 7 - Перевод РГБ в режим пониженного потребления (SLEEP);
Блок 8 - Передача данных на надводный ретранслятор;
Блок 9 - Конец алгоритма.
Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи работает следующим образом:
Алгоритм работы радиогидроакустического буя на микроконтроллере с блоком ЗПС представлен на Фигуре 3. Буй находится в подводном положении в режиме пониженного энергопотребления (режим SLEEP). При обнаружении цели происходит передача шумовых сигналов через звукоподводный канал на надводный ретранслятор. Для снижения влияния шумов квантования и соответственно повышения чувствительности буя используется внешний АЦП 3.2 измерительного блока 3 (Фигура 1) с разрядностью 16 (встроенный в микроконтроллер АЦП имеет разрядность 12). Работа микроконтроллера (МК) 3.3 измерительного блока 3 организована с использованием внешних прерываний, вызываемых изменением уровня напряжения на выводе CN4 микроконтроллера 3.3 («Программа управления радиогидроакустическим буем на микроконтроллере». Свидетельство о регистрации № 2017613161, дата государственной регистрации в реестре программ для ЭВМ 13.03.2017 г. ).
Для того, чтобы активизировать прерывание по изменению сигнала, в программе предусмотрены следующие действия:
- настройка канала CN4 на вход с помощью регистра TRISB;
- включение контроля изменения сигнала на входе CN4 с помощью регистров CNEN1 и CNEN2;
- включение подтягивающих резисторов с помощью регистров CNPU1 и CNPU2;
- разрешение прерывания по изменению сигнала на CN4 (_СNIE=1);
- в подпрограммах обработки прерываний сбрасываются флаги прерываний.
Теперь как только изменится сигнал на контролируемом выводе CN4, установится флаг прерывания CNIF, и управление будет передано в функцию обработки прерывания.
При отсутствии цели (UВЫХ>Uпор) РГБ находится в режиме пониженного электропотребления (SLEEP). Когда напряжение на выходе гидрофона UВЫХ превысит пороговое значение Uпор, триггер Шмитта 3.1 измерительного блока 3 переключится в единичное состояние и на выводе CN4 МК 3.3 измерительного блока 3 (Фигура 1) сформируется положительный перепад напряжения, что является сигналом внешнего прерывания. Произойдет переход к обработчику прерывания. Начнется запись последовательных отсчетов в микросхему памяти FlashROM 4.1 блока ЗПС 4. Если в процессе записи напряжение на выходе гидрофона станет меньше порогового, триггер Шмитта переключится в нулевое состояние, при этом будет выработан сигнал прерывания, который запустит обработчик, останавливающий процесс записи и переводящий РГБ в режим SLEEP. Если сигнал от цели появится повторно, то снова будет включен режим «Запись» и запись отсчетов АЦП начнется с «нулевых» ячеек в микросхему памяти FlashROM 4.1 блока ЗПС 4. По истечению 10 секунд после начала записи будет выработан сигнал прерывания, который запустит обработчик, обеспечивающий чтение записанных данных из микросхемы памяти FlashROM 4.1 блока ЗПС 4 и передачу их на вход Ethernet-адаптера 4.2 блока ЗПС 4.
Технический результат изобретения заключается в создании нового радиогидроакустического буя на микроконтроллере с блоком ЗПС, имеющего в своем составе звукоподводный модем для связи с надводным ретранслятором. Реализация поставленной задачи позволяет достичь следующий суммарный технический результат:
- упрощение конструкции буя за счет обеспечения возможности передачи отсчетов сигнала от цели на надводный ретранслятор через звукоподводный канал;
- обеспечение связи каждого РГБ в барьере с надводным ретранслятором и объединение их в звукоподводную локальную вычислительную сеть (ЛВС);
Заявленное устройство промышленно применимо, так как при его изготовлении могут быть использованы распространенные устройства и компоненты, такие как:
- МК на интегральной микросхеме (ИМС) dsPIC33FJ32GP204;
- аналого-цифровой преобразователь (АЦП) на ИМС LTC1864;
- триггер Шмитта на ИМС 74LS14;
- FlashROM на ИМС М45РЕ80;
- Ehernet-адаптер на ИМС ENC28J60;
- модем S2CR18/34
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиогидроакустический буй на микроконтроллерах | 2017 |
|
RU2659347C1 |
| Радиогидроакустический буй на микроконтроллерах с базой данных эталонных сигналов | 2019 |
|
RU2723914C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2021 |
|
RU2769559C1 |
| РЕАКТИВНЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2021 |
|
RU2788510C2 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| Радиогидроакустическая система экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2618671C1 |
| Способ компенсации фазовых искажений в многоканальных системах аналого-цифрового преобразования сигналов и устройство для его реализации | 2019 |
|
RU2723566C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| АВИАЦИОННЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2020 |
|
RU2753986C1 |
Изобретение относится к гидроакустике, а именно к устройствам регистрации акустических сигналов и может быть использовано для обнаружения, определения местонахождения и классификации движущихся подводных объектов. Буй содержит последовательно соединенные гидроакустическую антенну (гидрофон), предварительный усилитель, измерительный блок на микроконтроллере, связанный по входу с выходом предварительного усилителя. В его состав дополнительно введен блок звукоподводной связи, связанный с измерительным блоком через последовательный интерфейс и включающий микросхему памяти FlashROM, содержащую отсчеты сигнала от цели, микросхему Ethernet- адаптера, предназначенную для приведения передаваемых по сети данных к формату кадра Ethernet, и модем, осуществляющий подключение буя к звукоподводной локальной вычислительной сети. Упрощается конструкция буя. Обеспечивается связь между отдельными РГБ в барьере путем их объединения в звукоподводную локальную вычислительную сеть. 3 ил.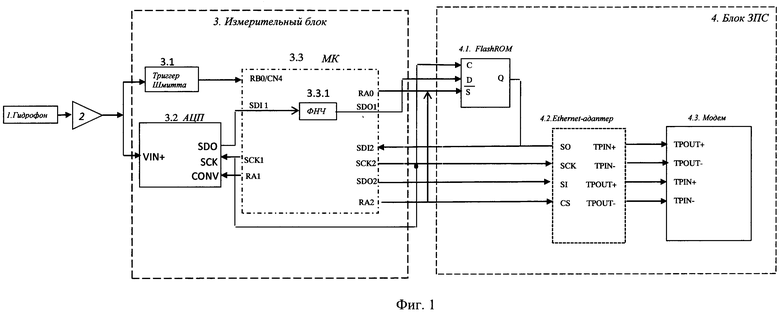
Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи, содержащий последовательно соединенные гидроакустическую антенну (гидрофон), предварительный усилитель, измерительный блок на микроконтроллере, связанный по входу с выходом предварительного усилителя, отличающийся тем, что дополнительно введен блок звукоподводной связи (ЗПС), связанный с измерительным блоком через последовательный интерфейс и включающий микросхему памяти FlashROM, содержащую отсчеты сигнала от цели, микросхему Ethernet- адаптера, предназначенную для приведения передаваемых по сети данных к формату кадра Ethernet, и модем, осуществляющий подключение буя к звукоподводной локальной вычислительной сети.
| Радиогидроакустический буй на микроконтроллерах | 2017 |
|
RU2659347C1 |
| Устройство и способ энергосбережения автономного приемопередатчика морского радиогидроакустического буя | 2016 |
|
RU2653403C2 |
| 0 |
|
SU99621A1 | |
| ГИДРОАКУСТИЧЕСКИЙ БУЙ ДЛЯ ИССЛЕДОВАНИЯ МИРОВОГО ОКЕАНА | 2005 |
|
RU2297940C2 |
| Швартовый петлевой капкан | 1959 |
|
SU130290A1 |

