Изобретение относится к гидроакустике, а именно к устройствам регистрации акустических сигналов, и может быть использовано для обнаружения, определения местонахождения и классификации движущихся подводных объектов.
Известно устройство - радиогидроакустический буй реактивный (Патент №2400392 RU, МПК B63B 22/00 от 27.09.2010 г.), содержащий корпус, батарею, парашютную систему, передатчик, приемник с гидрофонами, запоминающее устройство, кабель-трос, антенну, механизм автоотцепа, блок управления, часовой механизм, ракетный двигатель, стабилизатор, механизм отделения, устройство ввода данных, датчик приводнения, поплавок, газогенератор. Для осуществления пуска радиогидроакустического буя используются счетно-решающий прибор, приборы управления стрельбой и пусковая установка, предназначенные для стрельбы реактивными глубинными бомбами. Достигается сокращение времени, необходимого для доставки устройства в заданную точку и приведения его в рабочее состояние.
Основными недостатками предлагаемого буя являются:
• малая скрытность, обусловленная тем, что поплавковая часть буя постоянно находится в надводном положении;
• время непрерывной работы буя ограничено, так как ретрансляция акустических сигналов на борт носителя производится сразу же с момента установки;
• полоса пропускания буя включает не все спектральные составляющие шума винтов современных ПЛ;
• дрейф характеристик аналоговых фильтров в следствии старения их компонентов.
Известно устройство - энергонезависимый гидроакустический буй (Патент № 2584954 RU, МПК B63B 22/00 от 20.05.2016 г.), содержащий корпус в виде сжатой сферы, оборудованный водометным движителем, корпус сверху обтянут тонкой пленкой на тканевой основе, представляющей собой кремниевую солнечную батарею, в корпусе расположен электрогенератор, через систему управления соединенный с электродвигателем и аккумуляторной батареей, на вал электрогенератора в верхней части за пределами корпуса насажена крыльчатка, к нижней части которой шарнирно прикреплены щетки, прижимаемые к поверхности корпуса пружинами. Данное изобретение направлено на совершенствование системы электропитания радиогидроакустического буя.
Основными недостатками данного буя являются:
• малая скрытность, обусловленная тем, что поплавковая часть буя постоянно находится в надводном положении;
• полоса пропускания буя включает не все спектральные составляющие шума винтов современных ПЛ;
• дрейф характеристик аналоговых фильтров вследствие старения их компонентов.
Наиболее близким по технической сущности к заявленному изобретению является авиационный радиогидроакустический буй РГБ-16, который выбран в качестве прототипа. Прототип содержит опускаемое устройство, включающее в себя гидроакустическую антенну и предварительный усилитель; блок комбинированный, включающий в себя тракт усиления акустического сигнала, радиопередающий тракт, дальномерный канал, стабилизаторы питания; приемо-передающую радиоантенну, источник тока, устройство самоликвидации, парашютную систему, пусковое устройство. (С.В. Попов, В.В. Емельяненко, И.Н. Сургаев. Радиогидроакустические буи противолодочной авиации. Владивосток: ТОВМИ им. С.О. Макарова, 2002.) Однако основными недостатками буя РГБ-16 являются:
• полоса пропускания от 2 до 5000 Гц включает не все спектральные составляющие шума винтов современных ПЛ;
• дрейф характеристик аналоговых фильтров вследствие старения их компонентов;
• малая скрытность, обусловленная тем, что поплавковая часть буя с излучающей радиоантенной, постоянно находится в надводном положении;
• время непрерывной работы буя ограничено 5 ч, так как ретрансляция акустических сигналов на борт носителя производится сразу же с момента приводнения.
На устранение указанных недостатков направлено новое техническое решение «Радиогидроакустический буй на микроконтроллерах», технической задачей которого является:
- повышение вероятности обнаружения цели путем расширения полосы пропускания буя с целью включения всех спектральных составляющих шума винтов современных ПЛ;
- повышение скрытности использования буя и увеличение времени его работы за счет нахождения его в подводном положении в режиме пониженного энергопотребления и наличия n радиопередающих трактов (РПТ).
Указанный технический результат достигается тем, что создано новое устройство - радиогидроакустический буй на микроконтроллерах, который содержит последовательно соединенные гидроакустическую антенну (гидрофон), предварительный усилитель, радиопередающий тракт и приемопередающую радиоантенну, а также устройство самоликвидации. Принципиальным отличием радиогидроакустического буя на микроконтроллерах является то, что в его состав дополнительно введен измерительный блок на микроконтроллере, реализующий функции управления и цифровой фильтрации, связанный по входу с выходом предварительного усилителя. Также дополнительно введен блок радиопередающих трактов (РПТ), включающий n РПТ, каждый из которых связан с измерительным блоком через последовательный интерфейс; при этом в состав каждого РПТ включены последовательно соединенные микросхема памяти, микроконтроллер, реализующий функции управления и цифроаналогового преобразования, и радиопередатчик, осуществляющий передачу шумовых сигналов от цели на носитель.
Введение измерительного блока на микроконтроллере позволяет реализовать фильтр нижних частот (ФНЧ) с полосой пропускания, включающей все спектральные составляющие шума винтов современных ПЛ, что способствует увеличению вероятности обнаружения цели и устраняет дрейф характеристик по причине старения радиокомпонентов, присущий аналоговым фильтрам.
Дополнительное введение блока радиопередающих трактов, включающего n РПТ, позволяет увеличить скрытность использования буя, так как блок РПТ находится в подводном положении, и всплытие очередного радиопередающего тракта происходит только в случае обнаружения цели. Увеличивается также и время работы буя за счет наличия n РПТ и нахождения буя в режиме пониженного энергопотребления до момента обнаружения цели.
Сущность изобретения поясняется чертежами.
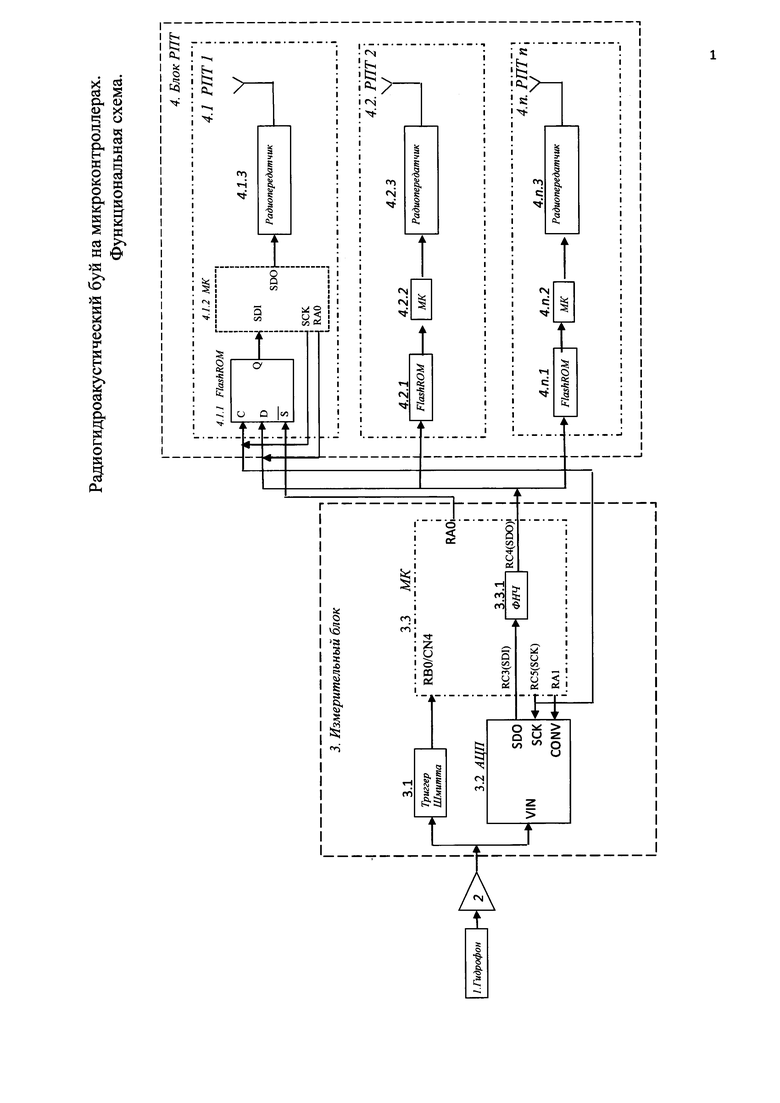
Фигура 1. Радиогидроакустический буй на микроконтроллерах. Функциональная схема.
Фигура 2. Радиогидроакустический буй на микроконтроллерах. Принципиальная электрическая схема.
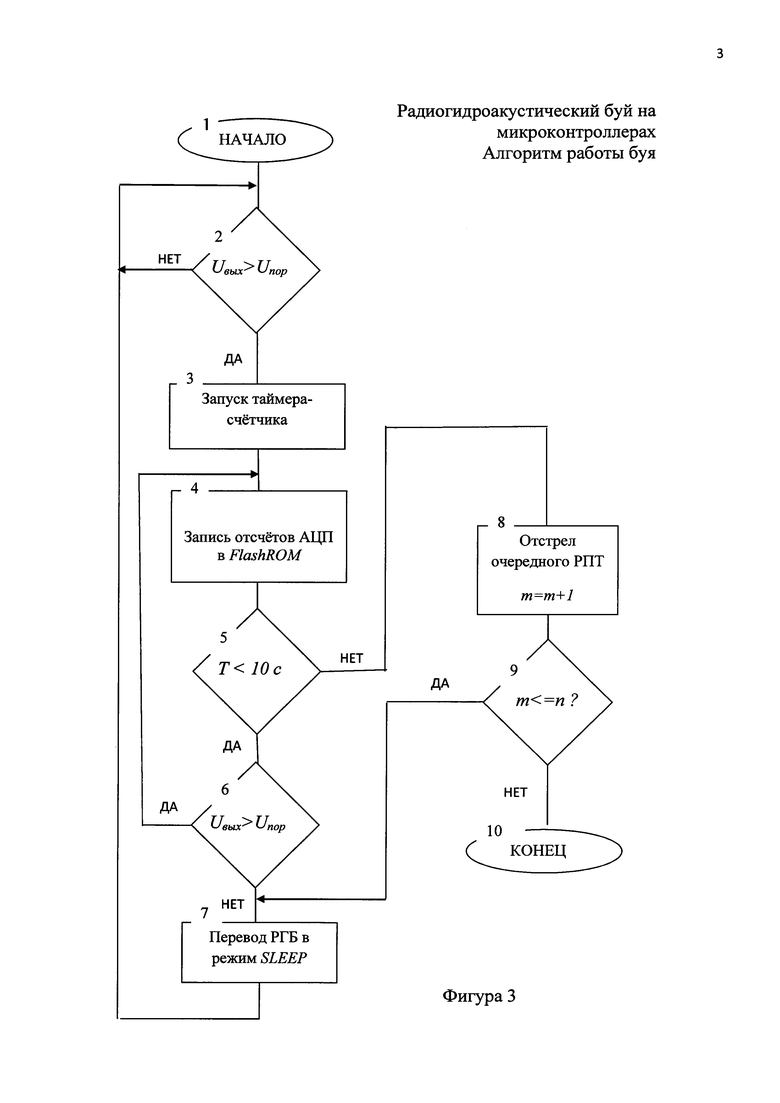
Фигура 3. Радиогидроакустический буй на микроконтроллерах. Алгоритм работы буя.
На Фигуре 1 представлена функциональная схема радиогидроакустического буя на микроконтроллерах:
1. Гидроакустическая антенна (гидрофон).
2. Предварительный усилитель.
3. Измерительный блок:
3.1. Триггер Шмитта
3.2. Аналого-цифровой преобразователь (АЦП)
3.3 Микроконтроллер (МК):
3.3.1 Фильтр нижних частот (ФНЧ).
4. Блок радиопередающих трактов (РПТ):
4.1 (4.2,..4.n). Радиопередающий тракт:
4.1.1(4.2.1…4.n.1). Микросхемы памяти FlashROM
4.1.2(4.2.2…4.n.2). Микроконтроллеры
4.1.3(4.2.3…4.n.3). Радиопередатчики.
Все конструктивные элементы буя связаны между собой электрическими связями.
Выход гидрофона 1 связан с входом предварительного усилителя 2. Выход предварительного усилителя 2 связан с установочным входом триггера Шмитта 3.1 и аналоговым входом VIN+ АЦП 3.2 измерительного блока 3. Выход триггера Шмитта 3.1 связан с входом RB0/CN4 микроконтроллера 3.3 измерительного блока 3, по которому организовано прерывание по перепаду напряжения. АЦП 3.2 связан с МК 3.3 измерительного блока 3 через последовательный интерфейс (модуль) SPI c использованием трёх выводов МК 3.3: последовательный цифровой выход данных SDO связан с последовательным входом данных RC3(SDI) модуля SPI, вход тактирования SCK АЦП 3.2 связан с выходом тактирования RC5(SCK), вход разрешения (запрещения) преобразования CONV связан с выходом RA1 МК 3.3, на котором программно формируется Лог. 0 для разрешения преобразования или Лог. 1 для разрешения передачи результата преобразования.
Результаты преобразования из выходного регистра АЦП 3.2 измерительного блока 3 последовательным кодом с использованием интерфейса SPI передаются в блок РПТ 4 и записываются в микросхемы памяти FlashROM 4.1.1…4.n.1, которые связаны с МК 3.3 измерительного блока 3 следующим образом: входы тактирования C, соединены с выходом тактирования RC5(SCK) модуля SPI МК 3.3, входы D соединены с последовательным выходом данных RC4(SDO) модуля SPI МК 3.3, входы выбора микросхемы S соединены с выходом RA0 параллельного порта portA МК 3.3, на котором программно формируется Лог. 0 для разрешения записи.
Микросхемы памяти FlashROM 4.1.1…4.n.1 каждого РПТ 4.1…4.n блока РПТ 4 связаны с микроконтроллерами 4.1.2…4.n.2 посредством интерфейса SPI. Микроконтроллеры 4.1.2…4.n.2 осуществляют чтение записанных данных из памяти, приведение их к аналоговому виду и передачу на вход радиопередатчиков 4.1.3…4.n.3.
На Фигуре 2 приведена принципиальная электрическая схема измерительного блока 3с микросхемами памяти блока радиопередающих трактов 4для случая, когда число РПТ n=3. Данная схема используется для моделирования работы буя в программе Proteus. В состав схемы входят:
U2 - микроконтроллер dsPIC33FJ32GP204;
U3 - АЦП LTC1864;
U1, U4, U7 - микросхемы FlashROM M45PE80;
U5.A - триггер Шмитта74LS14;
U6 - логический элемент НЕ;
R1 - резистор 1К.
Все элементы схемы соединены электрическими связями.
Напряжение на выходе предварительного усилителя буя, пропорциональное уровню шума, имитируется при помощи двух генераторов. Первый генератор - «Шум моря», второй - «Шум ПЛ». Генераторы подключаются к установочному входу 1 триггера Шмитта U5:A переключателями. Начальное состояние триггера - нулевое. Когда подключен только генератор «Шум моря», состояние триггера не изменяется. При подключении дополнительно генератора «Шум ПЛ», напряжение на входе 1 триггера U5:A превысит пороговое значение и произойдёт переключение триггера в единичное состояние. На выходе триггера 2 будет сформирован отрицательный перепад напряжения, так как выход триггера инверсный. На выходе логического элемента НЕ U6 и на входе CN4 микроконтроллера U2 сформируется положительный перепад напряжения, являющийся запросом на прерывание. Запустится программа - обработчик прерывания, который инициализирует запись отсчётов АЦП U3 в микросхемы FlashROM U1, U4, U7 через интерфейс SPI («Программа управления радиогидроакустическим буем на микроконтроллере». Свидетельство о регистрации № 2017613161, дата государственной регистрации в реестре программ для ЭВМ 13.03.2017 г.).
На Фигуре 3 приведен алгоритм работы радиогидроакустического буя на микроконтроллерах. Алгоритм включает следующие блоки:
Блок 1 - Начало алгоритма;
Блок 2 - Проверка условия «Уровень напряжения на выходе предварительного усилителя превышает пороговый уровень ?»;
Блок 3 - Запуск таймера счётчика для измерения интервала времени Т, в течение которого выполняется условие «UВЫХ>Uпор»;
Блок 4 - Запись отсчётов АЦП в память FlashROM каждого из n РПТ;
Блок 5 - Проверка условия Т< 10 c;
Блок 6 - Проверка условия UВЫХ>Uпор;
Блок 7 - Перевод РГБ в режим пониженного потребления (SLEEP);
Блок 8 - Отстрел m-го РПТ, где m - номер РПТ;
Блок 9 - Проверка условия «m<=n?», где n - количество РПТ;
Блок 10- Конец алгоритма.
Радиогидроакустический буй на микроконтроллерах работает следующим образом:
Алгоритм работы радиогидроакустического буя на микроконтроллерах представлен на Фигуре 3. Буй находится в подводном положении в режиме пониженного энергопотребления (режим SLEEP). При обнаружении цели происходит отсоединение (отстрел) очередного m-го РПТ 4.1…4.n от буя, который всплывает за счёт имеющейся у него положительной плавучести. После окончания сеанса связи происходит самоликвидация РПТ 4.m.
Для снижения влияния шумов квантования и соответственно повышения чувствительности буя используется внешний АЦП 3.2 измерительного блока 3 (Фигура 1) с разрядностью 16 (встроенный в микроконтроллер АЦП имеет разрядность 12). Работа микроконтроллера (МК) 3.3 измерительного блока 3 организована с использованием внешних прерываний, вызываемых изменением уровня напряжения на выводе CN4 микроконтроллера 3.3 («Программа управления радиогидроакустическим буем на микроконтроллере». Свидетельство о регистрации № 2017613161, дата государственной регистрации в реестре программ для ЭВМ 13.03.2017 г.).
Для того чтобы активизировать прерывание по изменению сигнала, в программе предусмотрены следующие действия:
- настройка канала CN4 на вход с помощью регистра TRISB;
- включение контроля изменения сигнала на входе CN4 с помощью регистров CNEN1 и CNEN2;
- включение подтягивающих резисторов с помощью регистров CNPU1 и CNPU2;
- разрешение прерывания по изменению сигнала на CN4 ( _CNIE=1);
- в подпрограммах обработки прерываний сбрасываются флаги прерываний.
Теперь как только изменится сигнал на контролируемом выводе CN4, установится флаг прерывания _CNIF, и управление будет передано в функцию обработки прерывания.
При отсутствии цели (UВЫХ<Uпор) РГБ находится в режиме пониженного электропотребления (SLEEP). Когда напряжение на выходе гидрофона UВЫХ превысит пороговое значение Uпор, триггер Шмитта 3.1 измерительного блока 3 переключится в единичное состояние и на выводе CN4 МК 3.3 (Фигура 1) сформируется положительный перепад напряжения, что является сигналом внешнего прерывания. Произойдёт переход к обработчику прерывания. Начнётся запись последовательных отсчётов в микросхемы памяти FlashROM 4.1.1…4.n.1 всех РПТ 4.1…4.n блока РПТ 4. Если в процессе записи напряжение на выходе гидрофона станет меньше порогового, триггер Шмитта переключится в нулевое состояние, при этом будет выработан сигнал прерывания, который запустит обработчик, останавливающий процесс записи и переводящий РГБ в режим SLEEP. Если сигнал от цели появится повторно, то снова будет включен режим «Запись» и запись отсчётов АЦП начнётся с «нулевых» ячеек в микросхемы памяти FlashROM 4.1.1…4.n.1 всех РПТ4.1…4.n блока РПТ 4. По истечению 10 секунд после начала записи будет выработан сигнал прерывания, который запустит обработчик, обеспечивающий выработку сигнала на отстрел очередного РПТ4.1…4.n и переведёт РГБ в режим SLEEP.
Технический результат изобретения заключается в создании нового радиогидроакустического буя на микроконтроллерах. Реализация поставленной задачи позволяет достичь следующий суммарный технический результат:
- повышение вероятности обнаружения цели путём расширения полосы пропускания буя с целью включения всех спектральных составляющих шума винтов современных ПЛ и устранение дрейфа характеристик ФНЧ;
- повышение скрытности использования буя и увеличение времени его работы за счет нахождения его в подводном положении в режиме пониженного энергопотребления.
Заявленное устройство промышленно применимо, так как при его изготовлении могут быть использованы распространённые устройства и компоненты, такие как:
- МК на интегральной микросхеме (ИМС) dsPIC33FJ32GP204;
- аналого-цифровой преобразователь (АЦП) на ИМС LTC1864;
- триггер Шмитта на ИМС 74LS14;
- микроконтроллер на ИМС PIC16F877A;
- FlashROM на ИМС М45РЕ80;
- радиопередатчик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиогидроакустический буй на микроконтроллерах с базой данных эталонных сигналов | 2019 |
|
RU2723914C1 |
| Радиогидроакустический буй на микроконтроллере с блоком звукоподводной связи | 2019 |
|
RU2703406C1 |
| РЕАКТИВНЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2021 |
|
RU2788510C2 |
| Способ измерения шумности подводного аппарата | 2023 |
|
RU2801077C1 |
| Способ освещения подводной обстановки и нейтрализации обнаруженных объектов | 2022 |
|
RU2789185C1 |
| СПОСОБ ПОИСКА ПОДВОДНЫХ ОБЪЕКТОВ ПОДО ЛЬДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662323C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2681476C2 |
| АВИАЦИОННЫЙ ПЛАВАЮЩИЙ ПОДВОДНЫЙ СНАРЯД | 2020 |
|
RU2753986C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| Радиогидроакустическая система экологического мониторинга и охраны районов нефтегазодобычи | 2016 |
|
RU2618671C1 |

Изобретение относится к гидроакустике, а именно к устройствам регистрации акустических сигналов, и может быть использовано для обнаружения, определения местонахождения и классификации движущихся подводных объектов. Радиогидроакустический буй на микроконтроллерах содержит последовательно соединенные гидроакустическую антенну (гидрофон), предварительный усилитель, радиопередающий тракт и приемо-передающую радиоантенну, а также устройство самоликвидации. В его состав также включены измерительный блок на микроконтроллере, в котором реализуются функции управления и цифровой фильтрации, связанный по входу с выходом предварительного усилителя, и блок радиопередающих трактов (РПТ), включающий n РПТ, каждый из которых связан с измерительным блоком через последовательный интерфейс. В состав каждого РПТ включены последовательно соединенные микросхема памяти, микроконтроллер, реализующий функции управления и цифроаналогового преобразования, и радиопередатчик, осуществляющий передачу шумовых сигналов от цели на носитель. Технический результат заключается в повышении вероятности обнаружения цели, повышении скрытности использования буя и увеличении времени его работы. 3 ил. 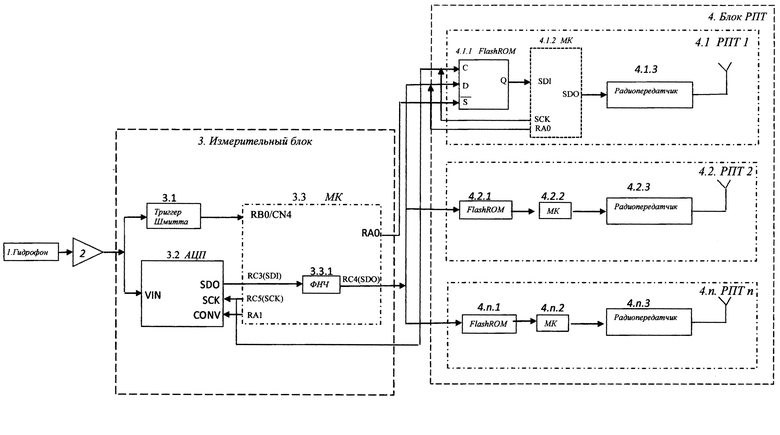
| УСТРОЙСТВО для СИНФАЗНОГО ВРАЩЕНИЯ РОТОРОВ | 0 |
|
SU160239A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| Барабанная сушилка для тканей | 1949 |
|
SU86694A1 |
| CN 203996792 U, 10.12.2014 | |||
| JP H08152473 A, 11.06.1996. | |||

