Предлагаемое изобретение относится к области медицинских электронных приборов, которое может быть использовано для диагностики различных заболеваний, в частности, в учреждениях практического здравоохранения, спортивной медицине, семейной медицине, консультативных диагностических центрах и для неотложного контроля (определения, регистрации, анализа) состояния здоровья человека.
Известно компактное мобильное устройство для исследования кардиореспираторной системы космонавтов на борту космических объектов (Патент на полезную модель РФ №77783, А61М 16/00, по заявке №2008126933/22 от 03.07.2008), содержащее герметичный корпус с размещенными в нем электронными блоками регистрации ЭКГ, фотоплетизмографии и пневмотахографии, расположенные снаружи корпуса соответствующие датчики, зондирующие электроды и средства крепления устройства к телу космонавта, отличающееся тем, что устройство дополнительно снабжено датчиком линейных ускорений для регистрации сейсмокардиограммы и электродами для регистрации кардиограммы, которые вместе с датчиками электрокардиограммы, фотоплетизмограммы и пневмотахограммы собраны в единый кабель и подключены к корпусу прибора, в корпусе прибора размещены соединенные с датчиками посредством единого кабеля последовательно расположенные блоки защиты от статического напряжения, дифференциальные усилители, фильтры низких и высоких частот, общий для всех блоков аналого-цифровой преобразователь, выход которого соединен с первым микроконтроллером, первый микроконтроллер через блок гальванической развязки соединен со вторым микроконтроллером, подключенным к USB-кабелю с помощью унифицированного разъема, электроды и датчики для регистрации сейсмограммы, фотоплетизмограммы, пневмотахограммы, из которых фотодатчик и датчик линейных ускорений подключены к универсальному кабелю через два дополнительных унифицированных разъема, механическая кнопка включения установлена на наружной поверхности корпуса таким образом, чтобы быть доступной для космонавта, дополнительно устройство снабжено световым индикатором его рабочего состояния, средства крепления выполнены с возможностью крепления датчика линейных ускорений в области проекции сердца.
Недостатком данного изобретения является сложность конструкции, избыточное количество кабелей и практически не возможность его использования для неотложного контроля состояния человека в течение длительного времени.
Известна носимая система контроля неотложного состояния человека (Paolo Castiglioni, Andrea Faini, Gianfranco Parati. Wearable Seismocardiography. Proceedings of the 29the Annual International Conference of the IEEE EMBS, Lyon, France, August 23-26, 2007. P. 3954-3957, реализованная, например, в международных заявках WO 2009043196 (А1), МПК А61В 5/00, от 09.04. 2009 и WO 2004086968 (A1), А61В 5/0408, от 14.10.2004 на комплексную структуру для обнаружения физиологических сигналов) содержащая в составе сейсмокардиоблока - электрокардиоблок с электродами и пьезоэлектрический датчик для измерения ритма дыхания, что позволяет учесть информацию о проекциях вектора g на измерительные оси микромеханических акселерометров.
Однако в процессе движения человека происходит изменение ориентации тела относительно плоскости местного горизонта и соответственно измерительных осей датчика микровибраций, а пьезоэлектрический датчик для измерения ритма дыхания не измеряет углы относительно плоскости горизонта, что приводит к значительному искажению сигналов. Кроме того, сама комплексная структура сложна, также как и обеспечение взаимной ориентации ее информационных элементов.
Известен способ измерения пульса (Патент РФ на изобретение №2318432 по заявке №2006109220/14, А61В 5/024, от 24.03.06), включающий преобразование пульсовых колебаний в электрические с помощью датчика, последующую их оцифровку и обработку с вычислением значений частоты и ритмичности пульса. В качестве датчика используют трехосевой микромеханический акселерометр, выходные сигналы которого являются проекциями вектора ускорения от воздействия пульсовых колебаний сердечной мышцы на оси ортогональной системы координат, а при обработке сигналов осуществляют выделение импульсов пульса путем цифровой фильтрации оцифрованных сигналов, амплитудную селекцию импульсных сигналов, их временной анализ и вычисление модуля вектора пульса по трем его проекциям.
При расположении датчика на груди в области сердца данное свойство сейсмоблока позволяет зафиксировать слабые колебания сердечной мышцы, возникающие в процессе сердцебиения, которые, собственно, и отражают пульс. При этом не требуется наличия электродов, т.к. датчик располагается вместе с блоками обработки и беспроводной передачи данных в одном устройстве (конструктивно устройство представляет собой единый сейсмокардиоблок), и не ограничивается двигательная активность человека.
Недостатком данного способа является то, что микромеханические акселерометры являются измерителями кажущегося ускорения и в его измеренной величине содержатся кроме ускорений сердцебиения проекции вектора силы тяжести, в том числе и низко периодические из-за дыхания человека и изменения ориентации сейсмокардиоблока относительно вектора ускорения свободного падения g.
Исходя из этого, возникает задача учета и исключения влияния на результаты измерения пульса проекции вектора силы тяжести, низко периодических колебаний из-за дыхания человека и изменения ориентации сейсмокардиоблока относительно вектора g, а также измерения углов ориентации осей чувствительности акселерометров относительно плоскости местного горизонта и проведения алгоритмической компенсации показаний акселерометров в сейсмокардиоблоке.
Техническим результатом является существенное уменьшение погрешности измерения модуля вектора ускорения сердцебиения, определение его ориентации относительно тела человека, связанной с положением и состоянием внутренних органов, и тем самым улучшение достоверности диагностики заболевания.
Изделие предполагается для применения как в стационарных диагностических комплексах по определению заболеваний, так и в носимых системах не отложного контроля состояния человека.
Указанный выше технический результат обеспечивается в сейсмокардиоблоке, содержащем корпус с размещенными в нем трехосным блоком микромеханических акселерометров и схемой обработки и передачи данных, тем, что в корпусе дополнительно размещен трехосный блок микромеханических гироскопов, связанный со схемой обработки и передачи данных.
Кроме того, схема обработки и передачи данных содержит вторичный источник питания со стабилизатором напряжения, блок малошумящих операционных усилителей, цифровой микроконтроллер (МК) со встроенными аналого-цифровым преобразователем (АЦП), интерфейсами US ART и JTAG и технологическим разъемом X1 для программирования МК, а также микросхему - преобразователь выходного интерфейса USART - RS-422 с основным разъемом сейсмокардиоблока, при этом три выхода, соответствующие осям трехосного блока микромеханических акселерометров, через соответствующие операционные усилители подключены к входам АЦП МК, три выхода, соответствующие осям трехосного блока микромеханических гироскопов, подключены к другим входам МК, выход вторичного источника питания подключен к входам соответствующих операционных усилителей, входу трехосного блока микромеханических акселерометров, входу МК и входу микросхемы - преобразователю выходного интерфейса USART - RS-422, выход стабилизатора напряжения подключен к входу трехосного блока микромеханических гироскопов и своему входу МК, технологический разъем X1 для программирования МК подключен к интерфейсу JTAG. интерфейс USART связан с микросхемой - преобразователем выходного интерфейса USART - RS-422, содержащей основной разъем сейсмокардиоблока, связанный обшей шиной с входами вторичного источника питания и стабилизатора напряжения.
Также достижение указанного выше технического результата обеспечивается способом измерения сейсмокардиоцикла, включающим преобразование пульсовых колебаний с помощью содержащего трехосный блок микромеханических акселерометров сейсмокардиоблока в электрические выходные сигналы, которые соответствуют проекциям вектора ускорения от воздействия пульсовых колебаний сердечной мышцы на оси ортогональной системы координат, а при обработке сигналов осуществляют выделение импульсов пульса путем цифровой фильтрации оцифрованных сигналов, и вычисление модуля вектора пульса по трем его проекциям, дополнительно используют трехосный блок микромеханических гироскопов с помощью которого преобразуют пульсовые колебания в дополнительные электрические выходные сигналы, вычисляют значения проекций кажущегося ускорения и угловых скоростей на приборную систему координат сейсмокардиоблока, осуществляют первичную фильтрацию и компенсацию систематических погрешностей смещения нулей и погрешностей коэффициентов преобразования акселерометров и гироскопов, вычисляют матрицу поворота текущего шага интегрирования, корректируют матрицу поворота, вычисляют модуль вектора собственного ускорения сердцебиения и углы вектора сердцебиения в приборной системе координат, после чего осуществляют вторичную фильтрацию сейсмокардиосигнала в виде временного ряда.
При изготовлении проводится индивидуальная заводская калибровка изделия, обеспечивающая оптимальную компенсацию погрешностей измерения.
Предлагаемое изобретение поясняется следующими чертежами:
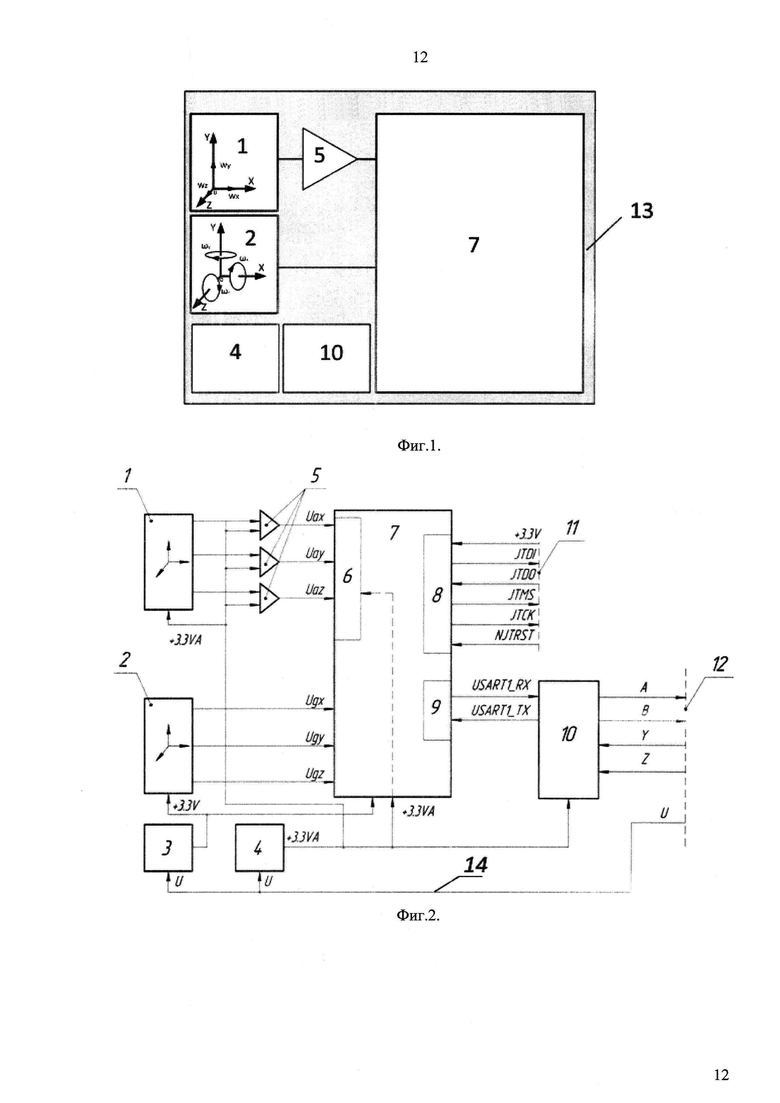
На фиг. 1 приведена компоновочная схема сейсмокардиоблока (СКБ).
На фиг. 2 приведена блок схема электрических связей элементов СКБ.
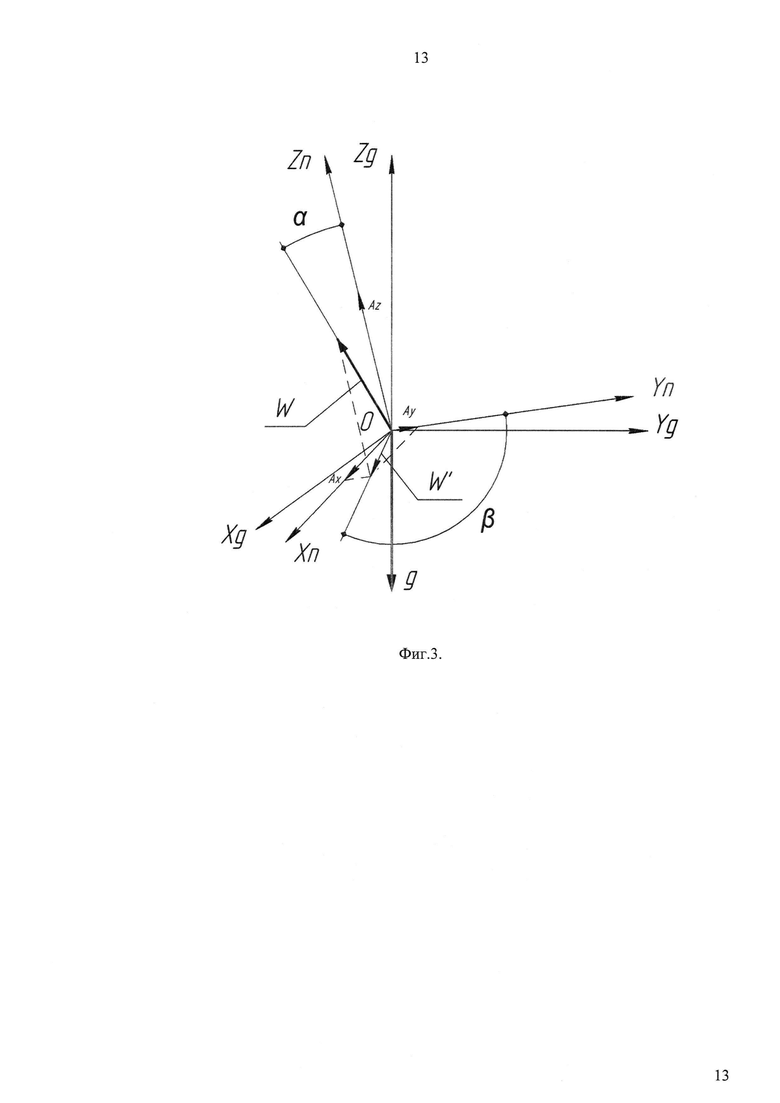
На фиг. 3 приведены системы координат относительно тела человека, используемые при вычислениях.
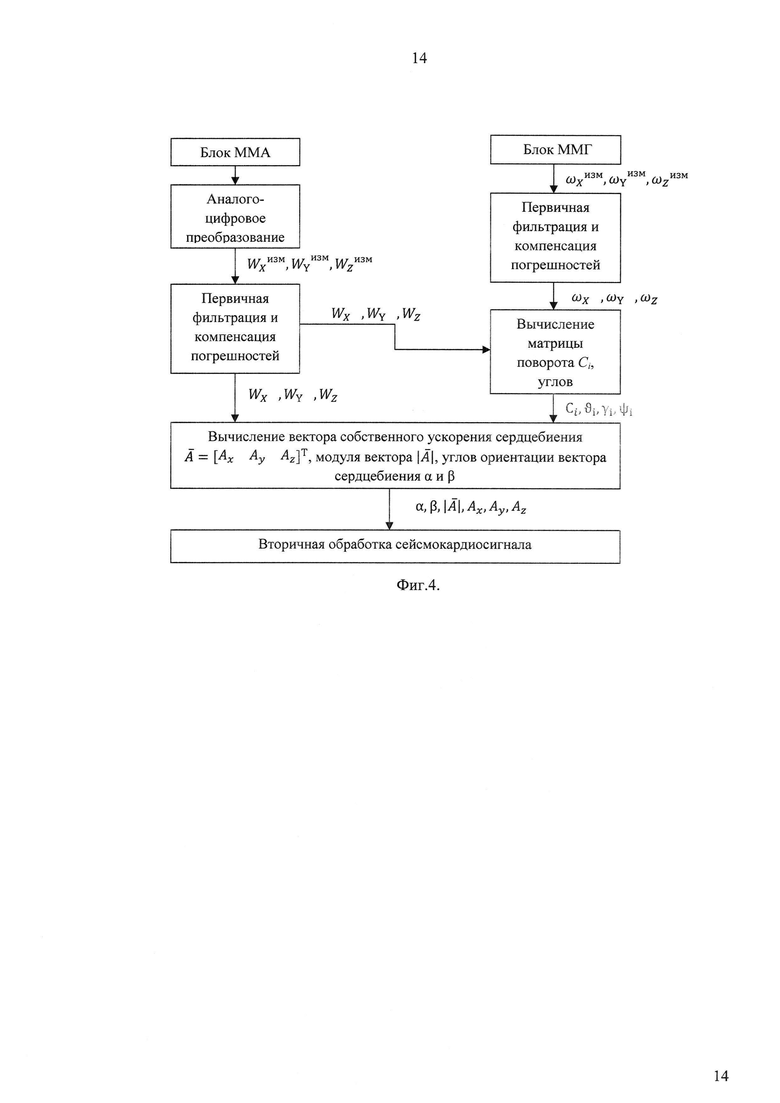
На фиг. 4 приведена блок схема способа измерения и вычисления сейсмокардиоцикла.
На фиг. 1 показано:
1 - трехосный блок микромеханических акселерометров (ММА);
2 - трехосный блок микромеханических гироскопов (ММГ);
4 - вторичный источник питания;
5 - блок буферных усилителей;
7 - микроконтроллер (МК);
10 - микросхема-преобразователь выходного интерфейса.
На фиг. 2 показано:
1 - ММА (аналоговые);
2 - ММГ (цифровые);
3 - стабилизатор напряжения с выходным номинальным напряжением 3,3 В;
4 - вторичный источник питания (стабилизатор напряжения с малым падением напряжения и выходным номинальным напряжением 3,3 В);
5 - малошумящие операционные усилители;
6 - встроенный аналого-цифровой преобразователь (АЦП);
7 - МК (цифровой) со встроенным АЦП и поддержкой интерфейсов USART и JTAG;
8 - интерфейс JTAG МК;
9 - интерфейс USART МК;
10 - микросхема - преобразователь выходного интерфейса USART - RS-422;
11 - технологический разъем X1 для программирования МК при изготовлении;
12 - основной разъем сейсмокардиоблока.
На фиг. 3 показано:
OПXПYПZП - приборная система координат СКБ;
OGXGYGZG - опорная система координат - полусвободная в азимуте географическая система координат;
 - вектор ускорения свободного падения,
- вектор ускорения свободного падения,  ,
,
Аx, Ay, Az, - проекции вектора собственного ускорения сердца в приборной системы координат.
α, - угол отклонения вектора собственного ускорения сердца от вертикали;
β, - угол поворота относительно направления по оси YП (к голове человека).
W - вектор кажущегося ускорения;
 - проекция вектора кажущегося ускорения на плоскость X; Y.
- проекция вектора кажущегося ускорения на плоскость X; Y.
Сейсмокардиоблок содержит корпус 13 с размещенными в нем трехосным блоком микромеханических акселерометров 1 и схемой обработки и передачи данных. В корпусе 13 дополнительно размещен трехосный блок микромеханических гироскопов 2, связанный со схемой обработки и передачи данных.
Схема обработки и передачи данных содержит вторичный источник питания 4 со стабилизатором напряжения 3, блок малошумящих операционных усилителей 5, цифровой микроконтроллер (МК) 7 со встроенными аналого-цифровым преобразователем (АЦП) 6, интерфейсами USART 9 и JTAG 8 и технологическим разъемом X1 11 для программирования МК, а также микросхему - преобразователь 10 выходного интерфейса USART - RS-422 с основным разъемом сейсмокардиоблока 12, при этом три выхода, соответствующие осям трехосного блока микромеханических акселерометров 1, через соответствующие операционные усилители 5 подключены к входам АЦП 6 МК, три выхода, соответствующие осям трехосного блока микромеханических гироскопов 2, подключены к другим входам МК 7, выход вторичного источника питания 4 подключен к входам соответствующих операционных усилителей 5, входу трехосного блока микромеханических акселерометров 1, входу МК 7 и входу микросхемы - преобразователю 10 выходного интерфейса USART - RS-422, выход стабилизатора напряжения 3 подключен к входу трехосного блока микромеханических гироскопов 2 и своему входу МК 7, технологический разъем X1 11 для программирования МК подключен к интерфейсу JTAG 8, интерфейс USART 9 связан с микросхемой - преобразователем 10 выходного интерфейса USART - RS-422, содержащей основной разъем 12 сейсмокардиоблока, связанный обшей шиной 14 с входами вторичного источника питания 4 и стабилизатора напряжения 3.
Сейсмокардиоблок работает следующим образом.
Чувствительными элементами в составе сейсмокардиоблока являются трехосный блок ММА 1 и трехосный блок ММГ 2. Сигналы с ММА 1 через блок буферных повторителей на основе малошумных операционных усилителей 5 и с ММГ 2 поступают в МК 3, где выполняется основные вычисления, включающие цифроаналоговое преобразование сигналов, первичную фильтрацию данных, вычисления и передачу данных. Для обеспечения высокой производительности и малого времени обработки данных выбирается микроконтроллер с высокой тактовой частотой. Прием команд и передача данных осуществляется по встроенному интерфейсу 10. Вторичный источник питания с малым падением напряжения 4 преобразует входное напряжения питания в 3.3 В для питания ММА 1, каскада повторителей 5 и встроенного АЦП 6 МК 7. Стабилизатор напряжения 3 обеспечивает напряжение входное напряжение для ММА 1, МК 7 и микросхемы интерфейса 10. Для программирования МК 7 в процессе разработки используется технологический разъем X1 11, соединенный со встроенным интерфейсом JTAG 8 микроконтроллера. Сейсмокардиоблок устанавливается на грудной клетке в области сердца пациента, который располагается горизонтально.
На фиг. 3 изображены используемые системы координат:
OПXПYПZП - приборная система координат СКБ;
OGXGYGZG - опорная система координат (полусвободная в азимуте географическая система координат);
 - вектор ускорения свободного падения,
- вектор ускорения свободного падения,  ,
,
Аx, Ay, Az, - проекции вектора собственного ускорения сердца в приборной системы координат.
α,° - угол отклонения вектора собственного ускорения сердца от вертикали;
β,° - угол поворота относительно направления по оси YП (к голове человека).
W - вектор кажущегося ускорения;
W' - проекция вектора кажущегося ускорения на плоскость XПOПYП,
С центром масс сейсмокардиоблока связаны приборная система координат и опорная системы координат. Центр приборной системы координат ОП (фиг. 3) лежит в центре посадочной плоскости OПXПYП СКБ. Ось ZП направлена вверх перпендикулярно посадочной плоскости. Направляющая плоскость YПOПZП, причем при креплении на человеке ось YП направлена к голове. Ось ХП дополняет систему координат до правой.
В качестве опорной системы координат используется географическая система координат полусвободная в азимуте OGXGYGZG, у которой оси XG и YG лежат в плоскости местного горизонта, а ось Z направлена перпендикулярно поверхности Земли (вертикально вверх).
При этом предполагается, что направление осей чувствительности акселерометров и гироскопов совпадают с соответствующими осями приборной системы координат. Погрешности установки ММА и ММГ относительно приборной системы координат компенсируются по результатам заводской калибровки.
На фиг. 4 изображена последовательность действий способа в виде алгоритма обработки данных. Результатом обработки входных измеренных проекций угловых скоростей и кажущихся ускорений является модуль А вектора собственного ускорения сердцебиения, значения его проекций на оси приборной системы координат и значения углов α и β.

Способ определения сейсмокардиоцикла сердца человека заключается в следующей последовательности действий по обработке сигналов с акселерометров и гироскопов, в соответствии с фиг. 4.
Измерение значений проекций кажущегося ускорения на оси приборной системы координат, аналого-цифровое преобразование сигналов и первичная фильтрация, компенсация смещения нулей и погрешностей коэффициента преобразования (для ускорений).
Измерение проекции угловых скоростей на оси приборной системы координат и компенсации смещения нулей и погрешности коэффициентов преобразования гироскопов (для угловых скоростей).
На основе полученных значений проекций угловых скоростей и кажущихся ускорений выполняется вычисление матрицы поворота приборной системы координат относительно опорной и вычисление углов ориентации крен, тангаж, рыскание. Далее вычисляется значение вектора собственного ускорения сердцебиения, его модуль и углы α и β.
Вторичная обработка полученных значений может производиться вне сейсмокардиоблока или, в случае носимого прибора, в микроконтроллере сейсмокардиоблока в упрощенном виде. Вторичная обработка полученного сейсмокардиосигнала в виде временного ряда подразумевает выполнение следующих действий.
Выполняется анализ шума сигнала с использованием метода вариации Аллана. Выполняется многоуровневый анализ сигнала с использованием банка фильтров (кратномасштабный вейвлет-анализ). При этом обеспечивается удаление шума, сглаживание, а также компрессия сигнала.
Выполняется сегментация сейсмокардиосигнала.
Выполняется спектральный анализ сигнала с помощью БПФ, строится АКФ сигнала. Производится обобщенная полиномиальная аппроксимация сегментированного сейсмокардиосигнала с использованием полиномов Чебышева.
По значениям коэффициентов аппроксимирующего полинома производится анализ формы волны сигнала и вычисляются следующие его характерные показатели: длительность фаз, размах значение фаз, смещение между средней точкой базовой линии и центрами фаз, площадь под кривой.
Выполняется многомерная обработка и анализ полученных показателей с помощью фазового и кластерного анализа данных. Для автоматического выявления принадлежности сигнала к одному из типов патологий или норме используется метод машинного обучения (нейронная сеть) и метод оценивания по Байесу.
Таким образом, получен технический результат, заключающийся в существенном уменьшении погрешности измерения модуля вектора ускорения сердцебиения, определение его ориентации относительно тела человека, связанной с положением и состоянием внутренних органов, и тем самым улучшении достоверности диагностики заболевания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ неинвазивного определения биофизических сигналов | 2020 |
|
RU2761741C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ИНФОРМАЦИИ О ТРАНСПОРТНОМ СРЕДСТВЕ | 2005 |
|
RU2298832C2 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| СПОСОБ СЧИСЛЕНИЯ КООРДИНАТ ПРИ НЕОРТОГОНАЛЬНОЙ ОРИЕНТАЦИИ ВХОДНЫХ ОСЕЙ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ | 2020 |
|
RU2785971C2 |
Группа изобретений относится к медицинской технике. Сейсмокардиоблок содержит корпус с размещенными в нем трехосным блоком микромеханических акселерометров, трехосным блоком микромеханических гироскопов и схемой обработки и передачи данных. Схема обработки и передачи данных содержит вторичный источник питания со стабилизатором напряжения, блок буферных повторителей на основе малошумящих операционных усилителей, цифровой микроконтроллер (МК) со встроенными аналого-цифровым преобразователем (АЦП), интерфейсами и технологическим разъемом для программирования МК, а также микросхему - преобразователь выходного интерфейса с основным разъемом сейсмокардиоблока. Три выхода, соответствующие осям трехосного блока микромеханических акселерометров, через операционные усилители подключены к входам АЦП, три выхода, соответствующие осям трехосного блока микромеханических гироскопов, подключены к другим входам МК, выход вторичного источника питания подключен к входам соответствующих операционных усилителей, входу трехосного блока микромеханических акселерометров, входу МК и входу преобразователя выходного интерфейса. Выход стабилизатора напряжения подключен к входу трехосного блока микромеханических гироскопов и входу МК. МК выполнен с возможностью цифроаналогового преобразования полученных сигналов, их фильтрации и вычисления модуля вектора собственного ускорения сердца и углов его ориентации в приборной системе координат для последующего контроля состояния человека. Раскрыт способ измерения вектора собственного ускорения сердца. Технический результат состоит в повышении достоверности диагностики за счет снижения погрешности измерения, определения ориентации вектора ускорения сердцебиения относительно тела человека. 2 н.п. ф-лы, 4 ил.
1. Сейсмокардиоблок, содержащий корпус с размещенными в нем трехосным блоком микромеханических акселерометров, трехосным блоком микромеханических гироскопов и схемой обработки и передачи данных, отличающийся тем, что схема обработки и передачи данных содержит вторичный источник питания со стабилизатором напряжения, блок буферных повторителей на основе малошумящих операционных усилителей, цифровой микроконтроллер (МК) со встроенными аналого-цифровым преобразователем (АЦП), интерфейсами USART и JTAG и технологическим разъемом для программирования МК, а также микросхему-преобразователь выходного интерфейса USART - RS-422 с основным разъемом сейсмокардиоблока, при этом три выхода, соответствующие осям трехосного блока микромеханических акселерометров, через операционные усилители подключены к входам АЦП МК, три выхода, соответствующие осям трехосного блока микромеханических гироскопов, подключены к другим входам МК, выход вторичного источника питания подключен к входам соответствующих операционных усилителей, входу трехосного блока микромеханических акселерометров, входу МК и входу преобразователя выходного интерфейса USART - RS-422, выход стабилизатора напряжения подключен к входу трехосного блока микромеханических гироскопов и своему входу МК, технологический разъем для программирования МК подключен к интерфейсу JTAG, интерфейс USART связан с микросхемой-преобразователем выходного интерфейса USART - RS-422, содержащей основной разъем сейсмокардиоблока, связанный общей шиной с входами вторичного источника питания и стабилизатора напряжения, при этом МК выполнен с возможностью цифроаналогового преобразования полученных сигналов, их фильтрации и вычисления модуля вектора собственного ускорения сердца и углов его ориентации в приборной системе координат для последующего контроля состояния человека.
2. Способ измерения вектора собственного ускорения сердца, включающий преобразование колебаний сердца с помощью содержащего трехосный блок микромеханических акселерометров сейсмокардиоблока в электрические выходные сигналы, которые соответствуют проекциям вектора кажущегося ускорения сердца на оси ортогональной системы координат, оцифровывают и подвергают фильтрации, отличающийся тем, что дополнительно используют трехосный блок микромеханических гироскопов, с помощью которого преобразуют сердцебиения в дополнительные электрические выходные сигналы, при этом осуществляют первичную фильтрацию сигналов и компенсацию систематических погрешностей смещения нулей и коэффициентов преобразований, на основе полученных значений проекций угловых скоростей и кажущихся ускорений вычисляют матрицу поворота приборной системы координат относительно опорной и углы ее ориентации, вычисляют модуль вектора собственного ускорения сердца и углы его ориентации в приборной системе координат, после чего осуществляют вторичную фильтрацию полученных значений в виде временного ряда и используют полученные данные для определения состояния человека.
| US 2015287338 A1, 08.10.2015 | |||
| US 2016325143 A1, 10.11.2016 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУЛЬСА ЧЕЛОВЕКА | 2006 |
|
RU2318432C2 |
| RU 77783 U1, 10.11.2008. | |||

