ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение испрашивает приоритет на основании корейской патентной заявки №10-2015-0136424, поданной 25 сентября 2015 года, раскрытие которой включено в данный документ посредством ссылки во всей своей полноте.
Настоящее изобретение относится к способу управления силой акупрессуры и сканированием человеческого тела в реальном времени, в котором для вычисления целевой силы акупрессуры в соответствии с пользователем в процессе управления силой акупрессуры в реальном времени с использованием акупрессурной секции с автоматическим приведением в движение, измеряют точку перегиба тока двигателя горизонтального приведения в движение в процессе горизонтального приведения в движение акупрессурной секции и вычисляют целевую силу акупрессуры путем учета отклонения между вертикальным положением акупрессурной секции в соответствующем положении и контрольным вертикальным положением для каждого горизонтального положения, сохраненного в базе данных, в значении коррекции силы акупрессуры.
УРОВЕНЬ ТЕХНИКИ
Как правило, акупрессура представляет собой мануальную терапию, направленную на укрепление здоровья или лечение заболеваний путем приложения давления к заданной части поверхности человеческого тела, при этом различные эффекты обеспечиваются путем увеличения или уменьшения силы акупрессуры или поддержания постоянной силы акупрессуры.
Общая терапия акупрессуры осуществляется путем вертикального приложения давления к заданной части, поддержания постоянного давления в течение заданного времени и затем снятия давления. Для поддержания давления постоянным требуется процесс измерения текущего давления и коррекции давления.
Обычные автоматические нагреватели обеспечивают силу акупрессуры, используя прижимающее усилие, прикладываемое к акупрессурной секции в соответствии с весом пользователя, при этом величина силы акупрессуры пропорциональна величине веса, причем для одного и того же веса величина силы акупрессуры изменяется в зависимости от распределения нагрузок, прикладываемых к изделию.
Здесь распределение нагрузок относится к разнице в степени, которой присваивается вес пользователя в каждом положении изделия. Когда нагрузка вследствие веса пользователя концентрируется на массажере, величина силы акупрессуры увеличивается, при этом, когда нагрузка вследствие веса пользователя концентрируется на других структурах, таких как пенопласт, величина силы акупрессуры уменьшается.
Когда акупрессурная секция поднимается, нагрузка концентрируется на массажере по сравнению с нагрузкой предыдущего состояния, так что величина силы акупрессуры увеличивается. Напротив, когда акупрессурная секция опускается, нагрузка концентрируется на других структурах за исключением массажера, так что величина силы акупрессуры уменьшается. Используя этот принцип, управляют величиной силы акупрессуры.
В обычных автоматических нагревателях применяется принцип управления силой акупрессуры с использованием вертикальной высоты акупрессурной секции. Однако, ввиду отсутствия устройства для измерения текущей силы акупрессуры, увеличение или уменьшение силы акупрессуры может быть достигнуто лишь на основе текущей силы акупрессуры, так что обычные автоматические нагреватели не могут реализовать силу акупрессуры при определенном значении.
Кроме того, обычные автоматические нагреватели имеют алгоритм управления силой акупрессуры, в котором измеряют горизонтальное положение, соответствующее положению позвонка пользователя, посредством процесса сканирования тела, вычисляют вертикальную высоту, соответствующую интенсивности массажа в соответствующем положении, и управляют акупрессурной секцией для ее перемещения в вертикальное положение, соответствующее вертикальной высоте, всякий раз, когда акупрессурная секция проходит через соответствующее горизонтальное положение.
Однако, когда пользователь перемещается в процессе массажа, и, таким образом, положение позвонка изменяется или пользователь заменяется другим пользователем, вертикальное положение также должно быть изменено в соответствии с этими изменениями. Однако процессом массажа управляют для использования предварительно сохраненного вертикального положения, что вызывает, таким образом, разницу между фактической силой акупрессуры и предполагаемой силой акупрессуры.
Это связано с тем, что процесс массажа выполняют с силой акупрессуры, соответствующей предварительно сохраненному положению позвонка, т.е. предварительно сохраненному вертикальному положению акупрессурной секции, даже когда положение позвонка пользователя изменяется, при этом существует ограничение на получение оптимального эффекта массажа с результатом, в котором не учитывается величина смещения, соответствующая смещению позвонка, вызванному пользователем.
Документ предшествующего уровня техники
Внесенный в реестр корейский патент №10-0495450 (2005.06.04.)
Техническая проблема
Настоящее изобретение создано для решения описанных выше проблем, при этом настоящее изобретение направлено на создание технологии для обеспечения силы акупрессуры, подходящей для пользователя, путем измерения точки перегиба измеренного значения тока приведения в движение, подаваемого в двигатель горизонтального приведения в движение в процессе горизонтального приведения в движение акупрессурной секции в начальном процессе массажа, вычисления новой целевой силы акупрессуры путем учета отклонения между вертикальным положением акупрессурной секции, соответствующим точке перегиба, и контрольным вертикальным положением для каждого горизонтального положения, сохраненного в базе данных, в значении коррекции силы акупрессуры, и учета новой целевой силы акупрессуры в управлении силой акупрессуры.
Настоящее изобретение также направлено на создание технологии, в которой, когда положение пользователя изменяется в процессе массажа или пользователь заменяется другим пользователем, и, таким образом, изменяется информация о сканировании, активно отслеживают измененное положение позвоночника с использованием информации о сканировании человеческого тела в реальном времени, и обеспечивают силу акупрессуры в точном положении.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном из аспектов настоящего изобретения предложен способ управления силой акупрессуры в реальном времени, причем способ содержит этапы: (а) установка контрольной вертикальной высоты для каждого горизонтального положения акупрессурной секции и установка целевой силы акупрессуры в диапазоне контрольной вертикальной высоты; (b) вычисление текущей измеренной силы акупрессуры из данных измерения нагрузки пользователя, приложенной к датчику нагрузки; и (с) сравнение целевой силы акупрессуры с текущей измеренной силой акупрессуры и управление вертикальной высотой акупрессурной секции.
На этапе (с) акупрессурная секция может быть вертикально опущена или вертикально поднята, когда текущая измеренная сила акупрессуры больше целевой силы акупрессуры или текущая измеренная сила акупрессуры меньше целевой силы акупрессуры, при этом акупрессурная секция может остановить вертикальное приведение в движение, когда текущая измеренная сила акупрессуры равна целевой силе акупрессуры.
Когда текущая вертикальная высота акупрессурной секции находится вне диапазона контрольной вертикальной высоты, измеренной силе акупрессуры может быть присвоено заданное предельное значение.
Этап (а) может дополнительно содержать (а') применение целевой силы акупрессуры с минимальным значением и определение определенного горизонтального положения, соответствующего точке перегиба измеренного значения тока приведения в движение, подаваемого в двигатель горизонтального приведения в движение в процессе перемещения акупрессурной секции вперед и назад.
Способ может дополнительно содержать вычисление значения коррекции для целевой силы акупрессуры путем использования отклонения между вертикальной высотой акупрессурной секции в определенном горизонтальном положении и контрольной вертикальной высотой в определенном горизонтальном положении.
Точка перегиба измеренного значения тока приведения в движение может быть вычислена в виде определенного положения позвоночника текущего пользователя, при этом, когда текущее положение позвоночника, соответствующее измеренному значению тока приведения в движение, подаваемого в двигатель горизонтального приведения в движение в процессе горизонтального перемещения акупрессурной секции в процессе массажа, отличается от определенного положения позвоночника, положение точки акупрессуры может быть скорректировано со сдвигом на отклонение между текущим положением позвоночника и определенным положением позвоночника.
Когда отношение расстояний для точек акупрессуры предыдущих положений позвоночника изменяется на отношение расстояний для точек акупрессуры текущих положений позвоночника вследствие замены пользователя, может быть скорректировано отношение для точек акупрессуры.
В другом аспекте настоящего изобретения предложен способ управления сканированием человеческого тела в реальном времени, причем способ содержит этапы: (А) сбор данных значения изменения электрического тока в соответствии с приведением в движение горизонтального двигателя, установка секции изменения тока и извлечение информации о положении в точках акупрессуры, соответствующих точке максимального перегиба и точке минимального перегиба секции изменения; (В) когда положение точки акупрессуры текущего пользователя в процессе массажа отличается от положения точки акупрессуры, соответствующей этапу (А), вычисление значения коррекции в соответствии с разницей между этими положениями; и (С) коррекция положений соответствующих точек акупрессуры текущего пользователя на значение коррекции, вычисленное на этапе (В).
Когда расстояние между точками акупрессуры текущего пользователя в течение процесса массажа отличается от расстояния между предыдущими точками акупрессуры, извлеченного на этапе (А), отношение расстояний для точек акупрессуры текущего пользователя может быть скорректировано на отношение расстояния между текущими точками акупрессуры и расстояния между предыдущими точками акупрессуры.
Полезные эффекты
Способ управления силой акупрессуры и сканированием человеческого тела в реальном времени согласно настоящему изобретению может обеспечить возможность оптимального управления интенсивностью массажа в соответствии с состоянием тела пользователя путем вычисления новой целевой силы акупрессуры в соответствии с измененным положением позвонка по отношению к положению текущего пользователя, когда пользователь изменяет свое положение или пользователь заменяется другим пользователем, и путем учета вычисленной новой целевой силы акупрессуры в управлении силой акупрессуры.
Способ управления силой акупрессуры и сканированием человеческого тела в реальном времени согласно настоящему изобретению может обеспечить массаж в реальном времени, оптимизированный для пользователя, путем использования точки перегиба измеренного значения тока приведения в движение двигателя горизонтального приведения в движение для горизонтального приведения в движение акупрессурной секции, обнаружения определенного положения отслеживания, соответствующего точке перегиба, в процессе массажа в реальном времени, и учета обнаруженного определенного положения отслеживания при управлении акупрессурной секцией, при этом данный способ может максимально улучшить эффективность работы путем устранения необходимости в дополнительном процессе сканирования человеческого тела, который требуется в обычной технологии.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
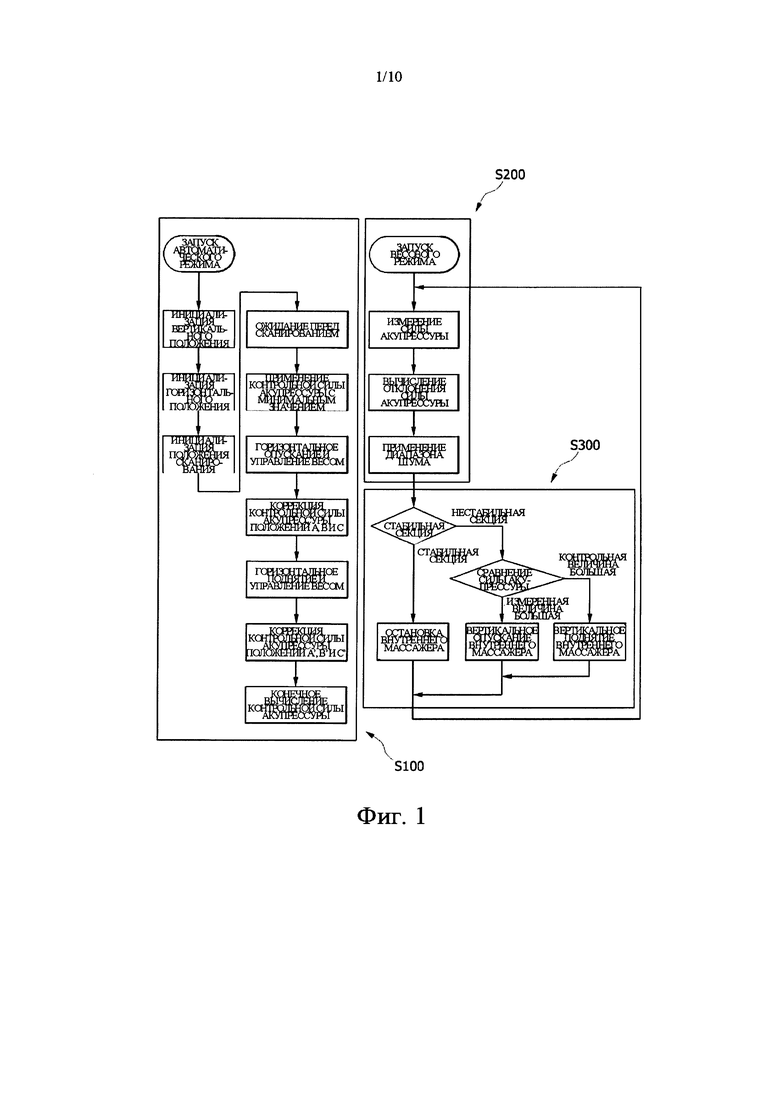
фиг. 1 - блок-схема, показывающая способ управления силой акупрессуры в реальном времени согласно настоящему изобретению.
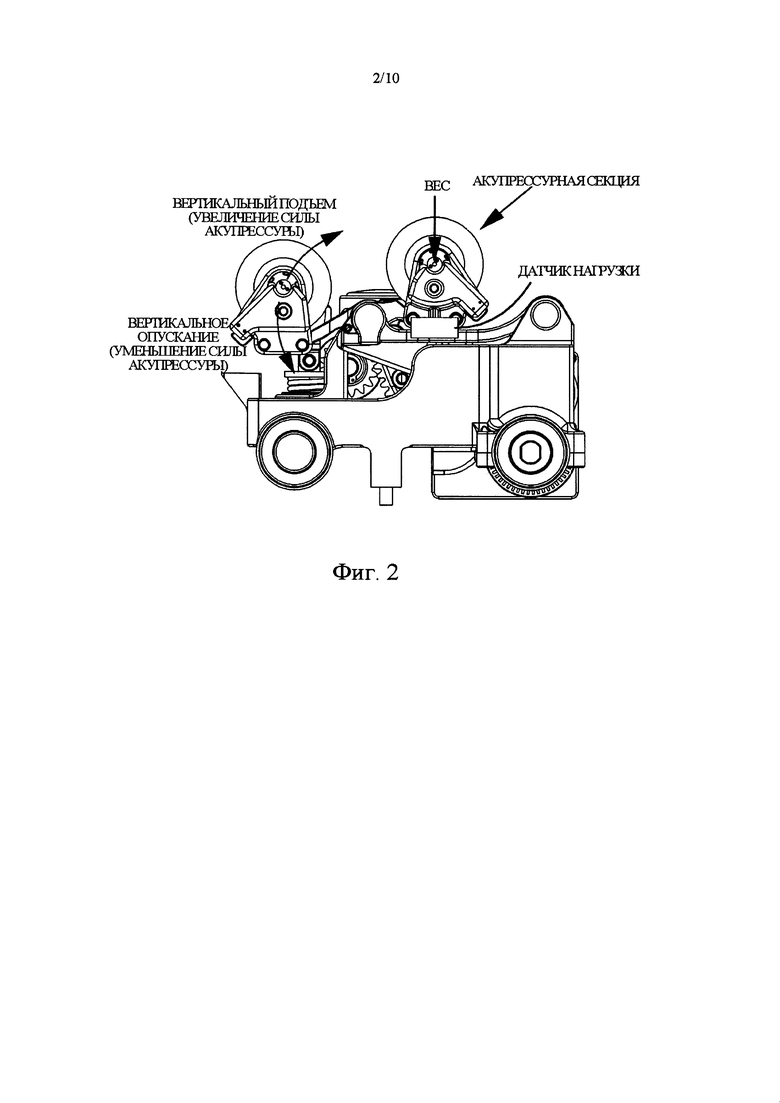
фиг. 2 - вид сбоку, иллюстрирующий модуль приведения в движение, применяемый в способе управления силой акупрессуры и сканированием человеческого тела в реальном времени.
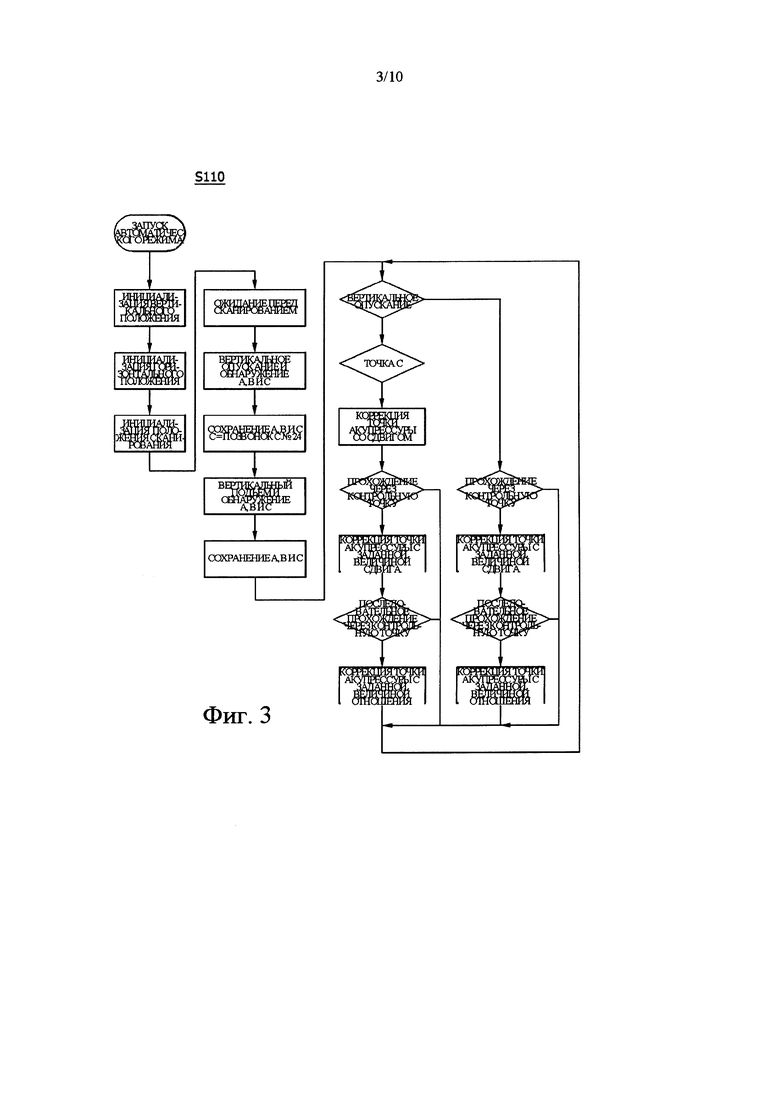
фиг. 3 - блок-схема, показывающая способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению.
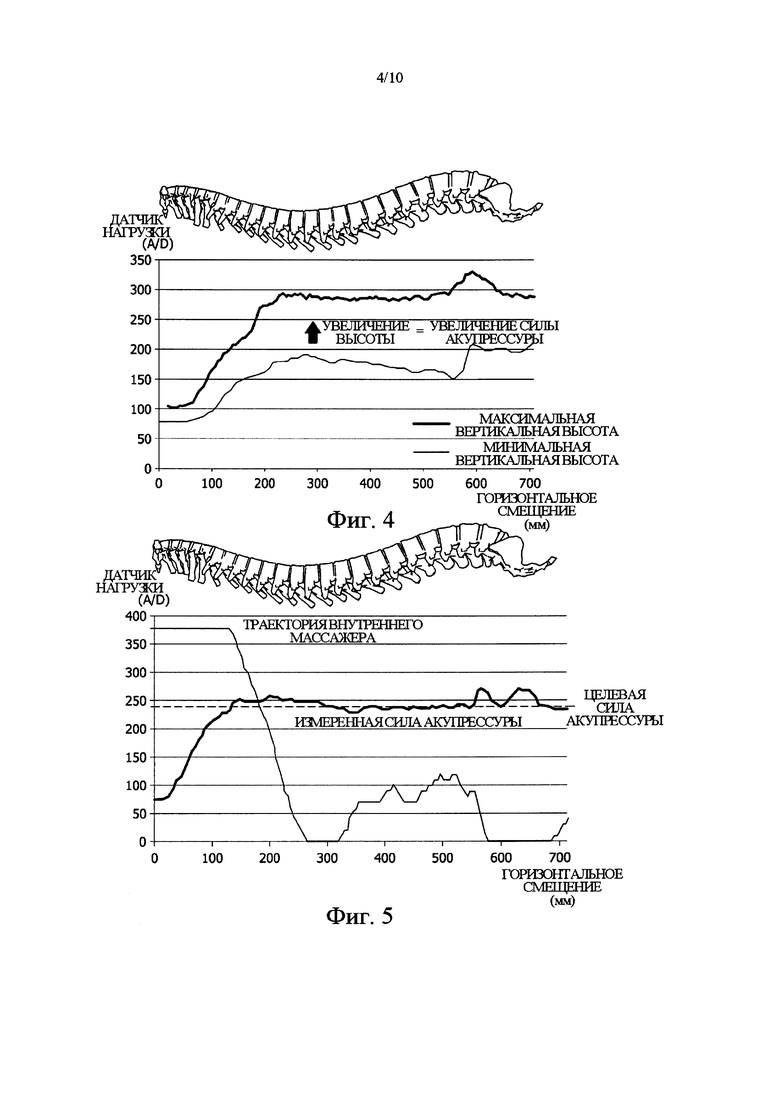
фиг. 4 - график, показывающий данные измерения веса датчика нагрузки с изменением вертикальной высоты и горизонтального смещения акупрессурной секции согласно настоящему изобретению.
фиг. 5 - график, показывающий результат применения способа управления силой акупрессуры в реальном времени согласно настоящему изобретению при определенной целевой силе акупрессуры.
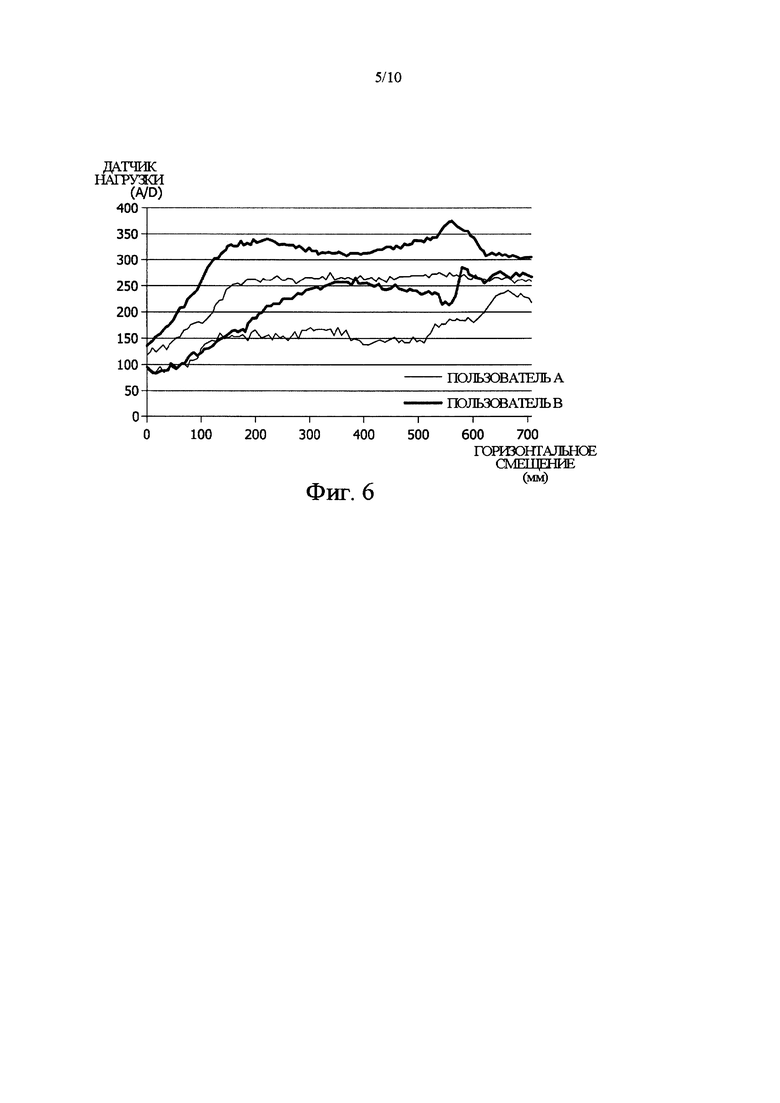
фиг. 6 - график, показывающий различные диапазоны измеренной силы акупрессуры в соответствии с телосложением пользователей.
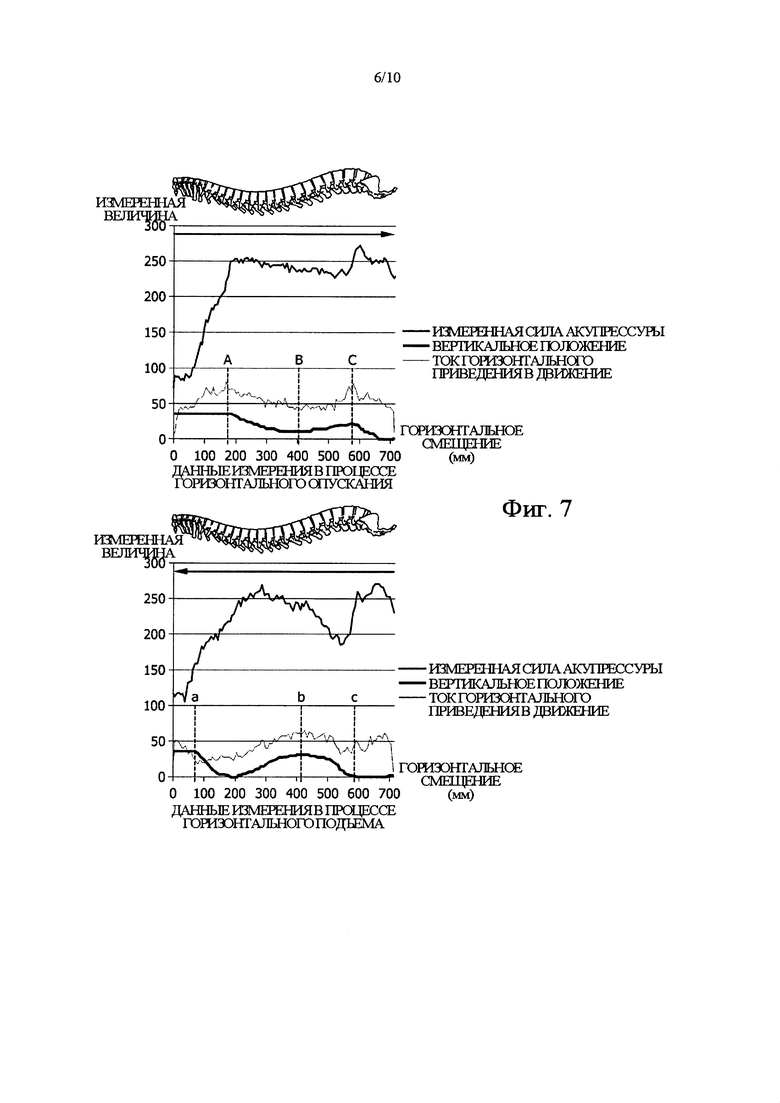
фиг. 7 - график, показывающий данные измерения в процессе контрольного горизонтального опускания и подъема при определенной целевой силе акупрессуры согласно настоящему изобретению.
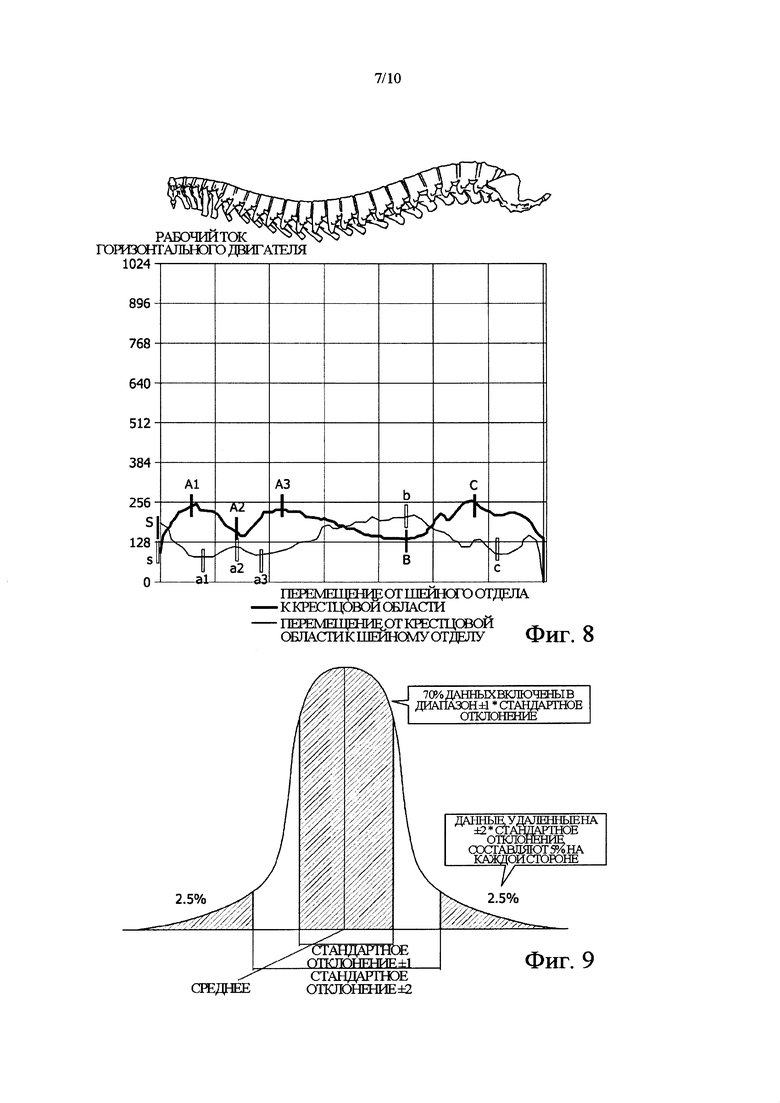
фиг. 8 - график, показывающий данные горизонтального тока сканирования человеческого тела, к которым применяется цервикальный изгиб согласно настоящему изобретению.
фиг. 9 - график, показывающий стандарт оценки специфичности данных нормального распределения согласно настоящему изобретению.
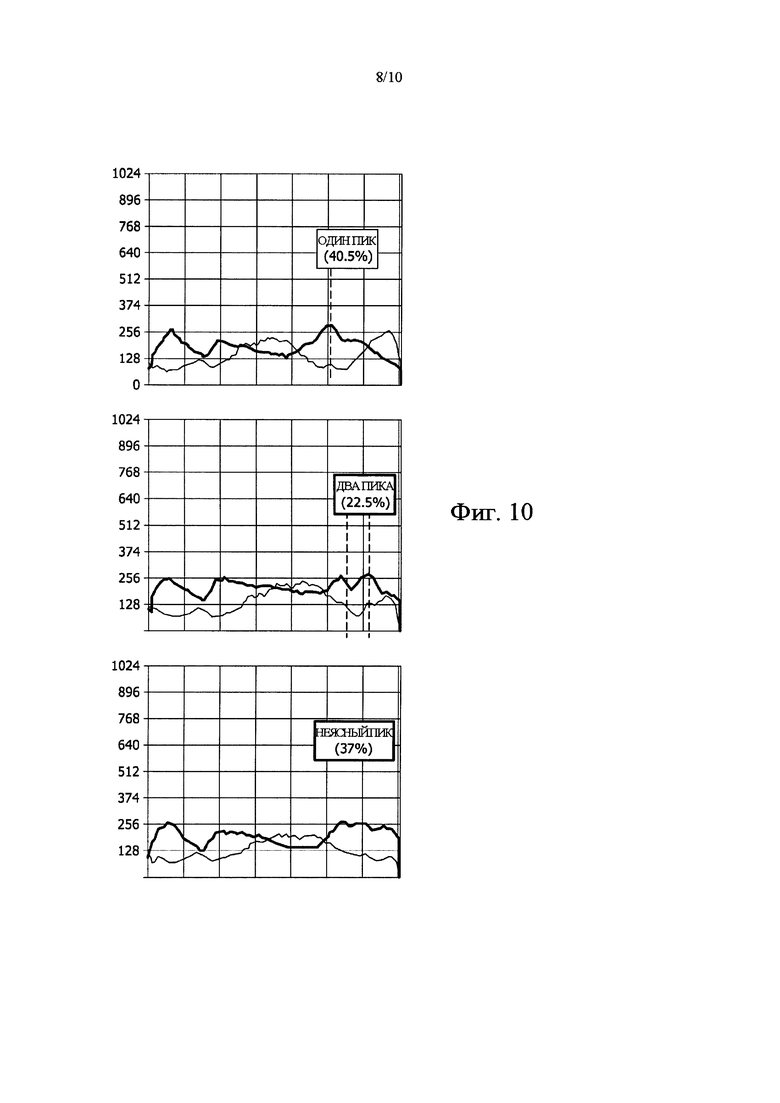
фиг. 10 - график, показывающий три типа обнаружения пика поясничной области согласно способу управления сканированием человеческого тела согласно настоящему изобретению.
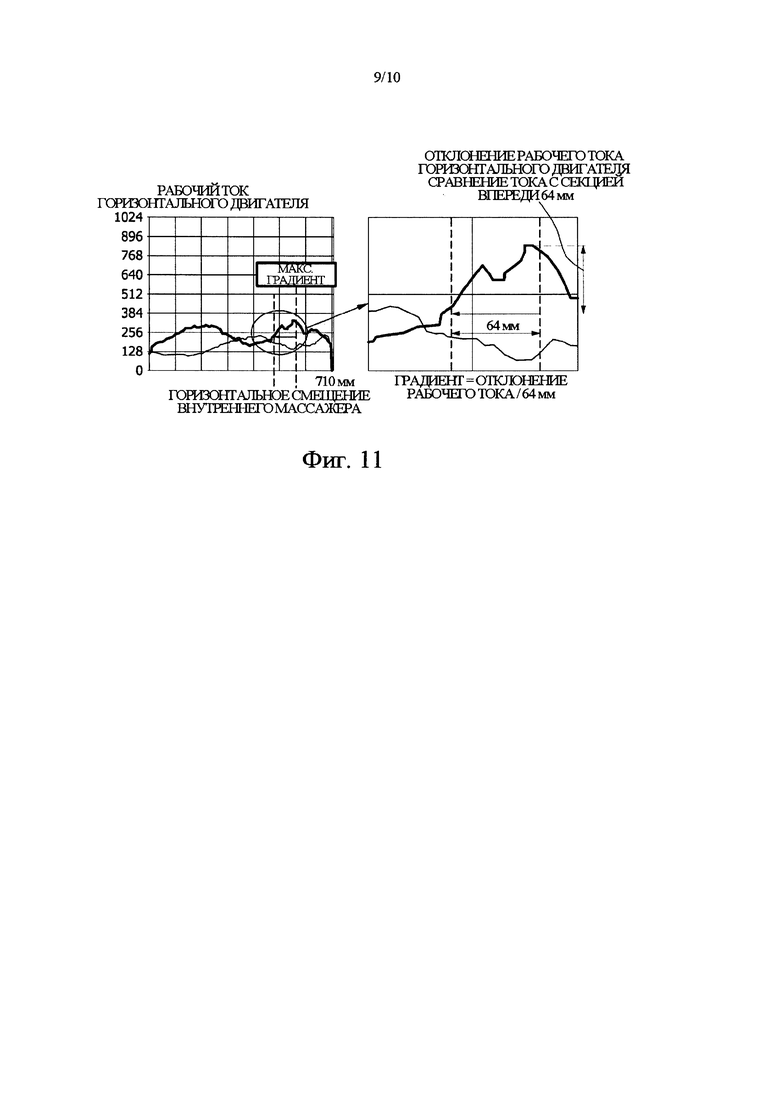
фиг. 11 - график, показывающий обнаружение положения с максимальным градиентом в данных тока горизонтального приведения в движение при сканировании человеческого тела, к которым не применяется цервикальный изгиб, согласно настоящему изобретению.
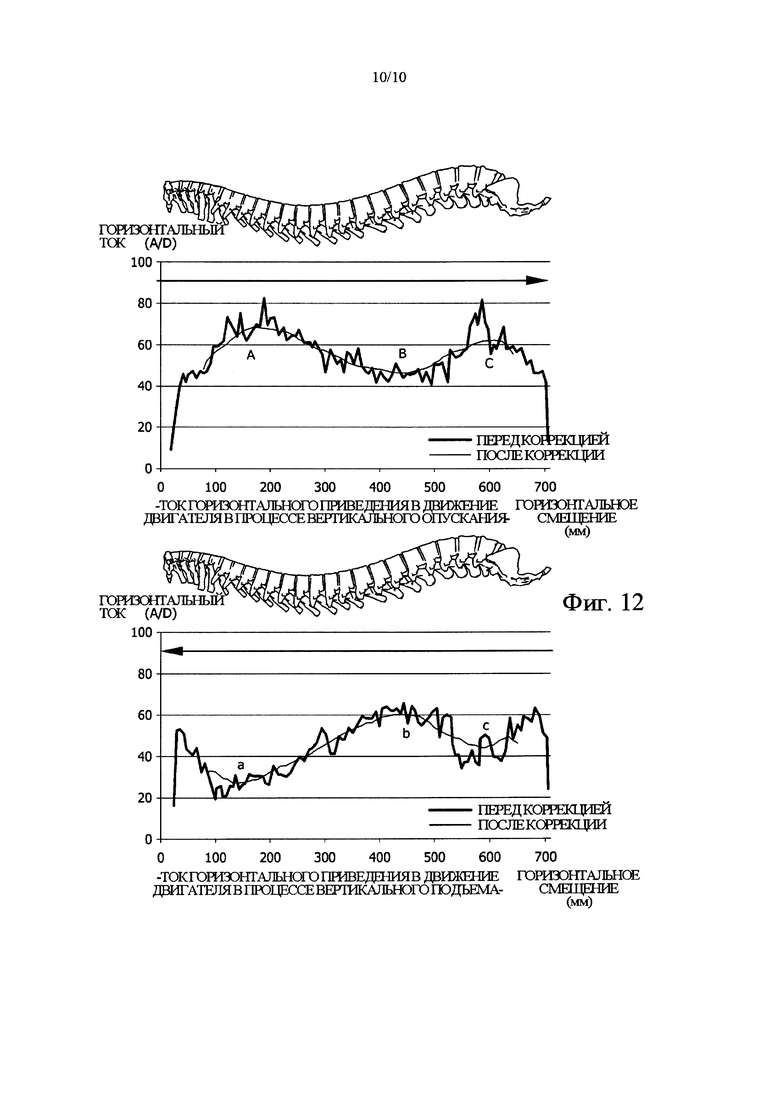
фиг. 12 - график, показывающий данные тока горизонтального приведения в движение нагревателя при сканировании человеческого тела согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже со ссылками на прилагаемые чертежи подробно описывается способ управления силой акупрессуры и сканированием человеческого тела в реальном времени согласно настоящему изобретению.
Как показано на фиг. 1 и 3, способ управления силой акупрессуры и сканированием тела согласно настоящему изобретению содержит (а) установку контрольной вертикальной высоты для каждого горизонтального положения акупрессурной секции и установку целевой силы акупрессуры в диапазоне контрольной вертикальной высоты (S100); (b) вычисление текущей измеренной силы акупрессуры из данных измерения нагрузки пользователя, приложенной к датчику нагрузки (S200); и (с) сравнение целевой силы акупрессуры с текущей измеренной силой акупрессуры и управление вертикальной высотой акупрессурной секции (S300).
Как показано на фиг. 1-3, этап (а) в операции S100 согласно настоящему изобретению представляет собой процесс установки контрольной вертикальной высоты для каждого горизонтального положения акупрессурной секции и установки целевой силы акупрессуры в диапазоне контрольной вертикальной высоты.
Прежде всего, нагреватель согласно настоящему изобретению содержит модуль приведения в движение для приведения в движение акупрессурной секции, причем модуль приведения в движение содержит двигатель горизонтального и вертикального приведения в движение, выполненный в виде бесщеточного двигателя постоянного тока (BLDC), и акупрессурную секцию, выполненную в виде массажных элементов, расположенных в два ряда в направлении вперед-назад, при этом под акупрессурной секцией расположен датчик нагрузки для измерения нагрузки пользователя.
Как показано на фиг. 1-3, этап (b) в операции S200 согласно настоящему изобретению представляет собой процесс вычисления измеренной силы акупрессуры путем измерения нагрузки пользователя с использованием датчика нагрузки.
Иными словами, вес, приложенный к верхней стороне акупрессурной секции, переносится в датчик нагрузки через акупрессурную секцию, при этом электрический сигнал датчика нагрузки, измененный в соответствии с приложенным весом, определяется как измененное количество веса через цепь управления.
В ответ на изменение измеренного количества веса, цепь управления может управлять величиной силы акупрессуры путем поднимания или опускания акупрессурной секции, так что реализуется постоянная сила акупрессуры.
Одной из основных характеристик способа управления силой акупрессуры нагревателя согласно настоящему изобретению является то, что управление силой акупрессуры осуществляется в реальном времени.
Иными словами, обычный способ управления силой акупрессуры нагревателя осуществляется таким образом, что обнаруживают горизонтальные положения, соответствующие положениям позвонков пользователя, посредством процесса сканирования тела, вычисляют вертикальную высоту, соответствующую интенсивности массажа в соответствующем положении, и управляют акупрессурной секцией для ее перемещения в вертикальное положение, соответствующее вертикальной высоте, всякий раз, когда акупрессурная секция проходит через соответствующее горизонтальное положение.
Соответственно, когда положение позвонка перемещается в соответствии с перемещением пользователя в процессе массажа, вертикальное положение должно быть изменено в соответствии с этим перемещением положения позвонка, однако процессом массажа управляют на основе предварительно сохраненного вертикального положения, что, таким образом, вызывает разницу между фактической силой акупрессуры и предполагаемой силой акупрессуры.
Однако способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению вычисляет вертикальное положение, соответствующее текущему горизонтальному положению акупрессурной секции в реальном времени, посредством измерения и анализа силы акупрессуры, так что силой акупрессуры точно управляют для достижения целевого значения независимо от перемещения пользователя.
В этом случае целевая сила акупрессуры может быть установлена разной или одной и той же между горизонтальными положениями, так что силой акупрессуры можно управлять, чтобы она была разной между подучастками, или управлять, чтобы она была одной и той же на всех участках.
Как показано на фиг. 1-3, этап (с) в операции S300 согласно настоящему изобретению представляет собой процесс управления вертикальной высотой акупрессурной секции путем сравнения целевой силы акупрессуры с измеренной силой акупрессуры.
С этой целью нагреватель согласно настоящему изобретению имеет вертикальное положение акупрессурной секции, фиксированное на максимальном пределе и минимальном пределе, как показано на фиг. 3, и, при перемещении акупрессурной секции из положения позвоночника пользователя с номером 1 к секции максимального горизонтального хода путем горизонтального приведения в движение, собирает данные измерения веса с помощью датчика нагрузки вдоль горизонтальных положений акупрессурной секции.
По этим данным можно видеть, что существует разница в силе акупрессуры, которая изменяется с управлением вертикальной высотой акупрессурной секции в соответствии с горизонтальным положением.
Например, на фиг. 4 видно, что минимальный предел вертикальной высоты составляет около 180 A/D, при этом максимальный предел вертикальной высоты составляет около 290 A/D из данных датчика нагрузки в положении горизонтального смещения, составляющего 300 мм, таким образом, сила акупрессуры может быть реализована в диапазоне от 180 A/D до 290 A/D с помощью управления вертикальной высотой акупрессурной секции в положении горизонтального смещения, составляющего 300 мм.
Операция управления силой акупрессуры начинается с установки целевой силы акупрессуры на 240 A/D с минимальным пределом вертикальной высоты в положении горизонтального смещения, составляющем 300 мм, при этом операция управления силой акупрессуры прекращается, когда измеренная сила акупрессуры достигает 240 A/D, идентично целевой силе акупрессуры, тогда как вертикальная высота акупрессурной секции увеличивается, так что достигается целевая сила акупрессуры, составляющая 240 A/D.
Это может быть выражено в виде следующего условного выражения.
Если (целевая сила акупрессуры > измеренной силы акупрессуры), то выполняется вертикальное приведение в движение с подъемом
Иначе если (целевая сила акупрессуры < измеренной силы акупрессуры), то выполняется вертикальное приведение в движение с опусканием
Иначе остановка вертикального приведения в движение
Дополнительно, на фиг. 5 показан результат применения способа управления силой акупрессуры в реальном времени, в котором, когда целевая сила акупрессуры устанавливается равной 240 A/D и затем нагреватель перемещается из положения позвоночника с номером 1 к секции максимального горизонтального хода нагревателя посредством горизонтального приведения в движение, измеренная сила акупрессуры составляет 240 A/D, что является целевой силой акупрессуры, в диапазоне вертикальной подвижности акупрессурной секции таким же образом, как описано выше.
Согласно описанному выше результату, когда измеренная сила акупрессуры меньше 240 A/D, акупрессурная секция приводится в движение вертикально вверх, и, наоборот, когда измеренная сила акупрессуры больше 240 A/D, акупрессурная секция приводится в движение вертикально вниз, при этом когда измеренная сила акупрессуры составляет 240 A/D, акупрессурная секция не приводится в движение и остается в состоянии вертикальной остановки, так что на всех участках массажа достигается целевая сила акупрессуры, составляющая 240 A/D.
Однако управление выполняется в диапазоне вертикального приведения в движение, причем когда акупрессурная секция расположена на минимальном вертикальном пределе, сила акупрессуры больше не может быть уменьшена, при этом когда акупрессурная секция расположена на максимальном вертикальном пределе, сила акупрессуры больше не может быть увеличена.
В этом случае, когда фактические средства управления конфигурированы, значение измерения датчика нагрузки может иметь колебания вследствие шума, и, таким образом, измеренная сила акупрессуры также может иметь колебания.
Соответственно, существует необходимость в применении диапазона шума к целевой силе акупрессуры, при этом значение, превышающее в два раза шум текущей реализованной цепи, определяется как пригодное в качестве диапазона.
Описанное выше условное выражение при применении диапазона шума может быть изменено следующим образом.
Если (целевая сила акупрессуры > измеренной силы акупрессуры + диапазон шума), то выполняется вертикальное приведение в движение с подъемом
Иначе если (целевая сила акупрессуры < измеренной силы акупрессуры - диапазон шума), то выполняется вертикальное приведение в движение с опусканием
Иначе остановка вертикального приведения в движение
В случае, когда диапазон шума установлен равным 10 A/D в результате, показанном на фиг. 5, когда измеренная сила акупрессуры больше 250 A/D по отношению к целевой силе акупрессуры, составляющей 240 A/D, акупрессурная секция приводится в движение вертикально вниз, и, наоборот, когда измеренная сила акупрессуры меньше 230 A/D, акупрессурная секция приводится в движение вертикально вверх.
Когда измеренная сила акупрессуры попадает в диапазон от 230 АЛЭ до 250 A/D, акупрессурная секция находится в состоянии остановки вертикального приведения в движение, которое считается стабилизированным состоянием управления силой акупрессуры, при этом когда акупрессурная секция приводится в движение вертикально, как описано выше, для удобства описания считается, что акупрессурная секция находится в нестабилизированном состоянии управления силой акупрессуры.
Способ управления силой акупрессуры в реальном времени может быть реализован с использованием описанного выше примера. Однако когда пользователь заменен, должна быть использована другая целевая сила акупрессуры в соответствии с текущим использованием.
На фиг. 6 показаны различные диапазоны измеряемой силы акупрессуры в зависимости от телосложения пользователей, которые измеряются в процессе перемещения от положения позвоночника пользователя с номером 1 до секции максимального горизонтального хода нагревателя посредством горизонтального приведения в движение с вертикальным положением акупрессурной секции, фиксированным при максимальном пределе и минимальном пределе.
Иными словами, в случае пользователя А (малый вес) данные датчика нагрузки изменяются в диапазоне от 170 A/D до 260 A/D в точке горизонтального смещения 300 мм, а в случае пользователя В (большой вес), данные датчика нагрузки изменяются в диапазоне от 250 A/D до 320 A/D в точке горизонтального смещения 300 мм.
Когда подходящая целевая сила акупрессуры принимается за средний уровень диапазона, средний уровень, составляющий 215 A/D для пользователя А, и средний уровень, составляющий 285 A/D для пользователя В, не совпадают друг с другом, при этом когда целевая сила акупрессуры, составляющая 285 A/D для пользователя В, применяется к пользователю А, целевая сила акупрессуры, составляющая 285 A/D, превышает максимальную силу акупрессуры, реализуемую посредством вертикального приведения в движение акупрессурной секции и, таким образом, она не считается подходящей целевой силой акупрессуры.
Таким образом, целевая сила акупрессуры различна для каждого пользователя, при этом применение неподходящей целевой силы акупрессуры приводит к отклонению от диапазона, реализованного посредством вертикального приведения в движение акупрессурной секции, так что способ управления силой акупрессуры в реальном времени не может быть применен.
Соответственно, должен быть рассмотрен способ управления автоматическим вычислением другой целевой силы акупрессуры для каждого пользователя.
Иными словами, способ управления автоматическим вычислением другой целевой силы работает на основе принципа, корректирующего целевую силу акупрессуры с использованием вертикальной высоты акупрессурной секции в определенном горизонтальном положении.
Иными словами, фиг. 7 является результатом применения способа управления силой акупрессуры в реальном времени на основе целевой силы акупрессуры, составляющей 240 A/D, к определенному пользователю, при этом может быть выделено определенное горизонтальное положение в процессе перемещения вперед (называемого ниже "горизонтальное опускание") и перемещения назад (называемого ниже "горизонтальный подъем"), причем может быть вычислено значение коррекции целевой силы акупрессуры с использованием вертикальной высоты акупрессурной секции в выделенном определенном горизонтальном положении.
В этом случае выделение определенного горизонтального положения осуществляется с использованием точки перегиба измеренного значения тока приведения в движение двигателя горизонтального приведения в движение, применяемого для горизонтального перемещения акупрессурной секции.
Ток горизонтального приведения в движение представляет три точки перегиба для каждого из горизонтального опускания и горизонтального подъема по отношению ко всей секции массажа независимо от целевой силы акупрессуры, при этом горизонтальное положение акупрессурной секции называется определенным горизонтальным положением.
Ниже подробно описывается способ управления сканированием человеческого тела в реальном времени в соответствии со способом выделения точки перегиба с использованием тока горизонтального приведения в движение.
Прежде всего, как показано на фиг. 3, способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению содержит этапы: (А) установка секции изменения тока путем сбора данных значения изменения электрического тока в соответствии с приведением в движение горизонтального двигателя и извлечение информации о положении в точках акупрессуры, соответствующих точке максимального перегиба и точке минимального перегиба секции изменения; (В) когда положение точки акупрессуры текущего пользователя в процессе массажа отличается от положения точки акупрессуры, соответствующей этапу (А), вычисление значения коррекции в соответствии с разницей между этими положениями; и (С) коррекция положений соответствующих точек акупрессуры текущего пользователя на значение коррекции, вычисленное на этапе (В).
В этом случае способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению содержится в (а') определении определенного горизонтального положения, соответствующего точке перегиба измеренного значения тока приведения в движение, подаваемого в двигатель горизонтального приведения в движение в процессе горизонтального опускания или подъема акупрессурной секции (S110) в описанном выше способе управления силой акупрессуры в реальном времени.
Этап (А) согласно настоящему изобретению представляет собой способ обнаружения положений точек акупрессуры, различных для каждого пользователя, в котором отслеживают определенное положение позвоночника пользователя путем использования изменения силы отталкивания, применяемой к акупрессурной секции в течение горизонтального перемещения акупрессурной секции по отношению ко всей секции позвоночника пользователя, и который реализуют с использованием тока приведения в движение двигателя горизонтального приведения в движение.
Поскольку положение точки акупрессуры связано с определенным положением позвоночника, отслеживание определенного положения позвоночника представляет собой отслеживание положения точки акупрессуры.
Соответственно, собирают данные тока приведения в движение двигателя горизонтального приведения в движение, как показано на фиг. 7, когда акупрессурная секция перемещается от положения позвоночника с номером 1 к секции максимального горизонтального хода нагревателя посредством горизонтального приведения в движение с фиксированным вертикальным положением.
Положения точек перегиба от А1 до С и от a1 до с в данных, показанных на фиг. 8, могут быть связаны с положением определенных позвонков, при этом из испытаний на 138 пациентах было доказано, что положение точки перегиба С соответствует положению нижней стороны позвонка с номером 24. Напротив, положения позвонков, связанные с положениями точек перегиба от А1 до В и от a1 до с, изменяются у пользователей и не могут быть применены к способу управления сканированием человеческого тела в реальном времени.
Точность измерения положения нижней стороны позвонка с номером 23 в соответствии с настоящим испытанием получается путем вычисления длины позвоночника с использованием максимального значения нагрузки поясничной области, в котором измеряют расстояние от нижней части ушей (верхняя сторона позвоночника с номером 1) до верхней части тазовой кости (нижняя сторона позвоночника с номером 23), обнаруживают нижнюю сторону позвоночника с номером 24 с использованием точки максимального значения поясничной области в данных сканирования человеческого тела (т.е. точки 'С' на фиг. 7), и затем вычисляют номер 23 позвоночника.
Согласно приведенному выше результату вычисляют среднюю погрешность и стандартное отклонение 'В' относительно 'А', как показано на фиг. 8, где средняя погрешность измерения нижней стороны позвоночника с номером 23 составляет 3,63 мм, а стандартное отклонение составляет 30,85 мм.
Согласно исследованиям по измерениям тела корейцев, средняя длина позвоночника корейцев составляет 668 мм, при этом, когда средняя длина позвоночника делится на 30, количество позвонков, вычисляется средняя длина одного позвонка, которая составляет 22,27 мм.
Когда степень точности сканирования человеческого тела направлена на среднюю длину одного позвонка, для того, чтобы 70% всех субъектов измерения были включены в целевой диапазон, значение "средняя ошибка + стандартное отклонение" должно составлять 22,27 мм или меньше с учетом специфики нормального распределения, однако значение, соответствующее указанному выше результату измерения, оказывается равным 34,48 мм, что находится за пределами целевого диапазона.
(На фиг. 9 показано, что около 70% данных включено в диапазон ±1, помноженное на стандартное отклонение, и около 95% данных включено в диапазон ±2, помноженное на стандартное отклонение, в соответствии со специфичностью данных нормального распределения).
Стандартное отклонение результата измерения является относительно большим по сравнению со средней погрешностью, поскольку данные тока горизонтального приведения в движение сканирования человеческого тела представлены в трех типах, как показано на фиг. 10, и если один пик четко не обнаружен, то в результате сканирования человеческого тела возникает большая ошибка.
Основная причина неудачи обнаружения одного явного пика заключается в том, что акупрессурная секция имеет два ряда на верхней и нижней сторонах и, таким образом, при прохождении через тазовую область пользователя имеет пик в каждом из ряда верхней стороны и ряда нижней стороны или имеет пик в форме соответствующих суммированных пиков.
Способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению повышает точность измерения со следующими улучшениями.
Как показано на фиг. 11, чтобы минимизировать влияние акупрессурной секции с двумя рядами на верхней и нижней сторонах, может быть использован способ управления с использованием точки, в которой данные тока приведения в движение при сканировании человеческого тела имеют максимальную величину изменения до и после интервала, составляющего 64 мм, который представляет собой интервал с верху до низу акупрессурной секции, при этом точность измерения положения позвонка с номером 23 является следующей.
Способ испытаний для вычисления длины позвоночника с использованием 12 испытуемых пациентов и максимального градиента нагрузки поясничной области совершают сначала путем измерения расстояния от нижней части ушей (верхняя сторона позвоночника с номером 1) до верхней части тазовой кости (нижняя сторона позвоночника с номером 23) и обнаружения положения нижней стороны позвоночника с номером 24 с использованием положения максимального градиента поясничной области в данных сканирования человека, и затем вычисления позвоночника с номером 23.
Согласно приведенному выше результату вычисляют среднюю погрешность и стандартное отклонение 'В' относительно 'А', как показано на фиг. 8, где средняя погрешность измерения нижней стороны позвоночника с номером 23 составляет 6,25 мм, а стандартное отклонение составляет 15,74 мм.
Поскольку значение "средняя ошибка + стандартное отклонение" составляет 21,99 мм, что меньше 2,27 мм, средней длины одного позвонка, можно видеть, что 70% всех субъектов измерения включены в целевой диапазон.
Однако, согласно описанному выше способу управления, отслеживание положения выполняется только на определенной секции, что представляет собой сканирование человеческого тела на начальном этапе приведения в движение в автоматическом режиме, при этом, когда положение точки акупрессуры изменяется вследствие изменения положение пользователя после сканирования человеческого тела, измененное положение точки акупрессуры не учитывается в нагревателе.
Соответственно, хотя описанный выше способ управления сканированием человеческого тела в реальном времени доступен только при сканировании человеческого тела в определенной секции, в последующем описании приводится способ управления сканированием человеческого тела в реальном времени, который может учитывать измененное положение в нагревателе посредством постоянного слежения за точкой акупрессуры в процессе массажа.
В этом случае на способ может быть оказано небольшое воздействие в зависимости от того, зафиксировано ли вертикальное положение акупрессурной секции или нет.
Кроме того, в отличие от обычного способа, в котором положение точки акупрессуры вычисляют после полного завершения горизонтального приведения в движение с полным ходом и применяют вычисленное положение точки акупрессуры к нагревателю, в нижеследующем способе вычисляют положение точки акупрессуры всякий раз при прохождении определенного положения путем минимального горизонтального приведения в движение и применяют вычисленное положение к нагревателю.
Дополнительно, приведенный ниже способ может содержать не только коррекцию положения точки акупрессуры вследствие перемещения пользователя в процессе работы нагревателя, но также может содержать, при замене пользователя, определение замены пользователя с помощью только определенной секции горизонтального перемещения и повторное вычисление положения точки акупрессуры, так что процесс сканирования человека включен в операцию массажа.
С этой целью на фиг. 12 показаны данные измерения тока горизонтального приведения в движение двигателя горизонтального приведения в движение по отношению к горизонтальному положению акупрессурной секции, когда акупрессурная секция перемещается из положения позвоночника пользователя с номером 1 к секции максимального горизонтального хода нагревателя посредством горизонтального приведения в движение в состоянии, в котором акупрессурная секция имеет фиксированное вертикальное положение или работает в состоянии вверх/вниз для регулировки силы акупрессуры.
Эти данные имеют небольшие колебания в данных измерения тока горизонтального приведения в движение, однако они могут быть преобразованы в стабильное состояние путем коррекции с использованием среднего для определенной секции.
Эта определенная секция представляет собой диапазон контрольной коррекции горизонтального смещения, при этом для сведения к минимуму ошибок интервал между верхней стороной и нижней стороной акупрессурной секции предпочтительно может быть применен к определенной секции, причем для быстрого обнаружения точки акупрессуры определенный диапазон должен быть уменьшен надлежащим образом.
Положения точек от А до С и от а до с перегиба данных могут быть связаны с положениями определенных позвонков, в частности ожидается, что положение точки перегиба С соответствует положению нижней стороны позвонка с номером 24, как показано в существующем способе управления сканированием человеческого тела.
Дополнительно, этап (В) способа управления сканированием человеческого тела в реальном времени начинается с использования положений от А до В и от а до с при обнаружении точек акупрессуры.
В этом случае положения позвонков, связанные с положениями от А до В и от а до с, изменяются в зависимости от пользователей и не используются непосредственно в качестве положений позвонков.
Однако расстояния между А и С и а и с постоянны для каждого пользователя.
Например, положение точки перегиба А пользователя может быть обнаружено в положении, смещенном на сдвиг X в процессе массажа, но поскольку расстояния от А до В и до С и от а до с постоянны, положения от В до С и положения от а до с также должны быть смещены на сдвиг в X.
Иными словами, на этапе (С) согласно настоящему изобретению используется принцип, согласно которому, когда положение точки перегиба А смещается, смещение положения позвонка шейного отдела, связанного с положением точки перегиба А, отслеживают не непосредственно, но опосредованно отслеживают смещенные положения других позвонков посредством смещения положения С, что соответствует нижней стороне позвонка с номером 24, в соответствии со смещением точки перегиба А.
В описанном выше принципе отслеживания важно различать положения от А до С и от а до с относительно точек перегиба тока горизонтального приведения в движение двигателя.
Со ссылкой на данные на фиг. 12 видно, что А, С, а и с характеризуются увеличением и затем уменьшением, а В и b характеризуются уменьшением и затем увеличением.
Однако эти характеристики могут временно появляться даже в других точках, причем не только в положениях от А до С и от а до с, таким образом, другие точки могут быть ошибочно определены как положения от А до С и от а до с.
Дополнительно, каждая из А и С имеет одни те же характеристики, при этом каждая из а и с имеет одни те же характеристики, таким образом, различие между А и С и между а и с является неясным.
Соответственно, при определении положений от А до С и от а до с используется процесс идентификации точек перегиба путем деления всей горизонтальной секции перемещения на три области.
При делении горизонтальной секции перемещения на три области должна быть определена длина позвоночника в соответствии с высотой пользователя.
В случае нагревателя, имеющего диапазон горизонтального перемещения, составляющий 710 мм, согласно настоящему изобретению, известно, что стабильное сканирование человеческого тела может быть выполнено на пользователе с высотой от 1200 мм до 1864 мм, поскольку высота соответствует длине позвоночника от 498 до 774 мм на основе среднего отношения длины позвоночника к высоте, составляющего 41,53%, в соответствии с исследованиями измерений тела корейцев.
Значение 774 мм - это значение 710 мм, которое представляет собой секцию горизонтального перемещения, плюс 64 мм, что является расстоянием от верхней до нижней части акупрессурной секции.
Пользователь, имеющий тело западного типа, характеризуется тем, что длина верхней части тела меньше длины нижней части тела по сравнению с корейцами. В этом случае максимальная высота, гарантирующая стабильное сканирование человеческого тела, может быть больше 1864 мм.
Причина учета высоты пользователя заключается в том, что когда секция горизонтального перемещения разделяется на три области, положения от А до С и от а до с должны быть обнаружены без исключения длины позвоночника от 498 до 774 мм.
С этой целью положения А, В, С, a, b и с измерены на пяти испытуемых субъектах посредством тестового сканирования человеческого тела, при этом результаты показаны в таблице 1 ниже.
Дополнительно, используя результаты испытаний, точки для разделения областей могут быть установлены так, что точки А и а расположены в первой области, точки В и b расположены во второй области, а точки С и с расположены в третьей области. Эти точки показаны в таблице 2 ниже.
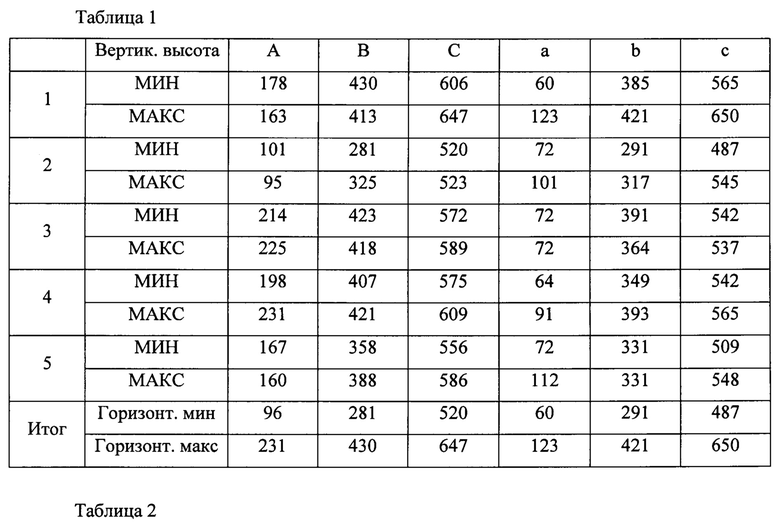
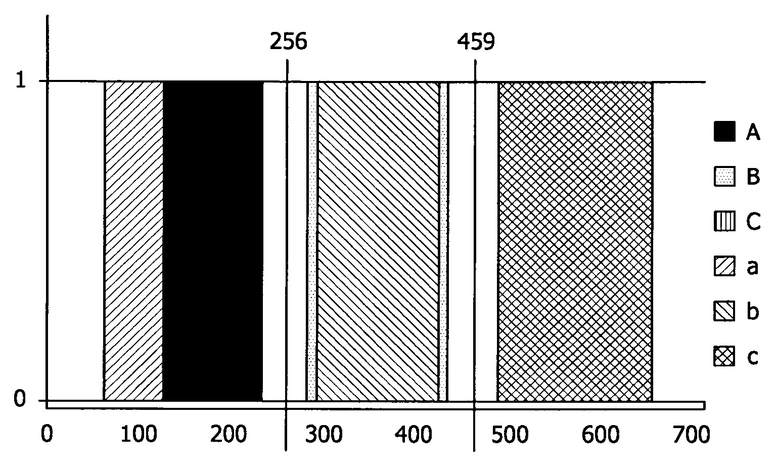
В соответствии с приведенными выше результатами можно видеть, что области обнаружения от А до С и от а до с не перекрываются друг с другом, когда секция горизонтального перемещения разделена в точках на расстояниях 256 мм и 459 мм от начального положения сканирования.
Дополнительно, в отношении указанных выше данных, при измерении положений от А до С и от а до с использованы максимальное и минимальное значения среднего определенной секции (±64 мм) тока приведения в движение двигателя горизонтального приведения в движение.
При использовании вместо этого максимального градиента, как показано на фиг. 11, возможно более точное извлечение данных.
В процессе последующей операции массажа способ обнаружения положений от А до С и от а до с на основе приведенного выше описания выполняют следующим образом.
Для тока горизонтального приведения в движение во время горизонтального опускания максимальное значение в первой области представляет собой А, минимальное значение во второй области представляет собой В, и максимальное значение в третьей области представляет собой С.
Для тока горизонтального приведения в движение во время горизонтального подъема минимальное значение в первой области представляет собой а, максимальное значение во второй области представляет собой b, а минимальное значение в третьей области представляет собой с.
Когда положения от А до С и от а до с изменяются в соответствии с перемещением пользователя, также должны быть изменены положения границ для разделения трех областей.
В связи с этим дополнительно должен быть рассмотрен еще один аспект. А именно, способ определения, когда интервал между точками акупрессуры изменяется вследствие замены пользователя в процессе использования нагревателя, т.е. при изменении отношения каждой из длин между А и С, В и С, а и С, b и С, и между с и С относительно длины между начальным положением сканирования и С.
Другими словами, первичная концепция применения сдвига, соответствующего измененному значению, к положениям всех точек акупрессуры в ответ на изменение одного положения от А до С и а до с сочетается со вторичной концепцией выполнения коррекции на всех точках акупрессуры посредством отношения секции на изменение отношения вследствие изменения нескольких положений от А до С и от а до с, что, таким образом, компенсирует способ управления сканированием человеческого тела в реальном времени.
С этой целью способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению может дополнительно содержать процесс коррекции положений точек акупрессуры посредством отношения секции с использованием данных, показанных в таблице 1 выше.
Когда вертикальная высота секции акупрессуры является наименьшей, испытуемый пациент 1 имеет положение А при 178 мм и положение В при 430 мм.
Когда положение А смещается в точку 200 мм в процессе операции массажа, положение В задается как 430+(200-178)=452 мм путем применения описанной выше первичной концепции.
Когда перемещение пользователя является естественным перемещением в соответствии с работой изделия, при этом В проходят после прохождения А без какой-либо специальной операции (без преобразования в горизонтальном направлении, остановки или трехмерного движения в середине операции), положение В должно быть обнаружено при 452 мм, как указано выше.
Когда положение В обнаруживают в положении, отличном от 452 мм, определяют, что пользователь не просто перемещен, а был заменен. В этом случае вместо смещения сдвига для точки акупрессуры с помощью первичной концепции требуется коррекция с использованием отношения секции для точек акупрессуры с помощью вторичной концепции.
Дополнительно к величине 452 мм должна быть применена заданная величина диапазона ошибок измерения, при этом вторичная концепция может быть применена только при последовательном прохождении двух положений относительно положений от А до С и от а до с.
Предполагая, что положение В обнаружено при 440 мм, а не 452 мм, и применен допуск измерения 10 мм, погрешность положения В превышает допустимый допуск измерения 10 мм, таким образом, В подлежит применению вторичной концепции.
В этом случае можно видеть, что интервал между А и В уменьшается от 430-178=252 мм до 440-200=240 мм. В результате, когда расстояние от текущей точки акупрессуры до другой точки акупрессуры на предыдущем этапе равно R, а расстояние от текущей точки акупрессуры до другой точки акупрессуры на текущем этапе равно Rn, Rn выражается следующим образом.
Уравнение 1
'Rn=R * (текущее расстояние между двумя точками / предыдущее расстояние между двумя точками)=R * 240/252'
Измененное положение Pn определенной точки акупрессуры на расстоянии от начального положения сканирования определяется следующим образом.
Уравнение 2
'Pn = текущее положение - Rn'
Когда положение определенной точки акупрессуры расположено на расстоянии Р от начального положения сканирования, изменение положения Dp измененной определенной точки акупрессуры Pn определяется следующим образом.
Уравнение 3
'Dp=Р-Pn'
Согласно концепции работы нагревателя значение Dp, большее или равное заданному значению, может быть определено как замена пользователя, при этом может быть применен новый процесс, такой как отображение устройства дистанционного управления и перезапуск режима приведения в движение.
Определенные горизонтальные положения различаются точкой перегиба тока приведения в движение двигателя горизонтального приведения в движение, как описано выше, при этом в состоянии, в котором установлена нормальная целевая сила акупрессуры, вертикальная высота в определенном горизонтальном положении сходна с определенным значением стандартного изгиба позвоночника.
Когда вертикальная высота меньше определенного значения, это означает, что целевая сила акупрессуры установлена равной небольшому значению, при этом, когда вертикальная высота выше определенного значения, это означает, что целевая сила акупрессуры установлена равной большому значению.
Дополнительно, поскольку отклонение между текущей установленной силой акупрессуры и подходящей целевой силой акупрессуры пропорционально отклонению между текущей вертикальной высотой и вертикальной высотой в определенном положении, значение коррекции для текущей целевой силы акупрессуры может быть вычислено с использованием пропорционального отношения для вычисления подходящей целевой силы акупрессуры.
Дополнительно, контрольные значения вертикальной высоты акупрессурной секции в определенных горизонтальных положениях, реализованных посредством способа управления силой акупрессуры в реальном времени, когда целевая сила акупрессуры установлена надлежащим образом, могут быть использованы следующим образом.
'А: максимальная вертикальная высота, В: 1/4 положения вертикальной максимальной высоты, С: 3/4 положения вертикальной максимальной высоты'
'а: максимальная вертикальная высота, b: 3/4 положения вертикальной максимальной высоты, с: минимальная вертикальная высота'
В этом случае способ автоматического вычисления целевой силы акупрессуры начинается с целевого давления при наименьшем значении.
В начале работы нагревателя, целевая сила акупрессуры имеет самое низкое значение, таким образом, акупрессурная секция поднимается до максимальной вертикальной высоты независимо от текущей силы акупрессуры.
Соответственно, работа нагревателя начинается с шейного отдела, в котором вертикальная высота поднимается до максимального уровня независимо от телосложения.
В процессе работы с целевой силой акупрессуры при самом низком значении, вертикальное положение акупрессурной секции всегда является максимальной вертикальной высотой, так что целевая сила акупрессуры постепенно увеличивается путем сравнения вертикальной высоты в каждом определенном положении.
После завершения вычисления целевой силы акупрессуры путем сравнения вертикальной высоты по отношению к шести определенным горизонтальным положениям посредством горизонтального опускания и подъема акупрессурной секции, целевая сила акупрессуры может быть применена к интенсивности массажа. Когда в процессе работы изделия определяют замену пользователя, необходимо заново применить описанный выше способ автоматического управления целевой силой акупрессуры.
Дополнительно, в отношении положений А, а и с, контрольное значение вертикальной высоты которых является самым высоким или самым низким, может иметь место ситуация, когда сравнение вертикальной высоты не может быть выполнено. Соответственно, предпочтительно учитывать отклонение между измеренной силой акупрессуры и целевой силой акупрессуры при вычислении новой целевой силы акупрессуры, при этом для применения подходящего отношения для отклонения может быть использована постоянная коррекции 'F'.
Дополнительно, способ автоматического вычисления целевой силы акупрессуры может непосредственно преобразовывать целевую силу акупрессуры путем сравнения вертикального положения в каждом определенном горизонтальном положении, при этом для предотвращения внезапного изменения целевой силы акупрессуры и предотвращения ошибки вычисления общей целевой силы акупрессуры вследствие ошибки мгновенного измерения, может быть применена постоянная коррекции 'Р', так что выполняется постепенная коррекция. Постоянная коррекции 'Р' может быть установлена равной 0,5 и может быть надлежащим образом изменена в соответствии с условием использования.
Наконец, конечную целевую силу акупрессуры вычисляют путем применения среднего значения для значений коррекции в шести определенных положениях.
В этом случае вычисляют новую целевую силу акупрессуры и конечную силу акупрессуры с использованием постоянных коррекции F и Р согласно следующим выражениям.
Уравнение 4
Новая целевая сила акупрессуры = предыдущая целевая сила акупрессуры + коэффициент коррекции F * (измеренная сила акупрессуры - целевая сила акупрессуры) + постоянная коррекции Р * (вертикальное контрольное положение - вертикальное текущее положение)
Уравнение 5
Конечная целевая сила акупрессуры = (сумма целевых сил акупрессуры в положениях от А до С и от а до с) / количество определенных положений
Как описано выше, поскольку измерение и управление осуществляют в реальном времени при управлении вертикальной высотой акупрессурной секции в соответствии с данными измерения веса датчика нагрузки, частью и всеми секциями управляют по отдельности или совместно с требуемой целевой силой акупрессуры независимо от перемещения пользователя.
Хотя способ управления сканированием человеческого тела в реальном времени согласно настоящему изобретению описан выше со ссылками на прилагаемые чертежи по отношению к определенной форме и направлению, специалисту в данной области техники очевидно, что могут быть выполнены различные модификации и изменения без отхода от объема и сущности настоящего изобретения.
Изобретение относится к медицине, а именно к способам управления силой акупрессуры в реальном времени. При этом устанавливают контрольную вертикальную высоту для каждого горизонтального положения акупрессурной секции. Устанавливают целевую силу акупрессуры в диапазоне контрольной вертикальной высоты. Вычисляют текущую измеренную силу акупрессуры из данных измерения нагрузки пользователя, приложенной к датчику нагрузки. Сравнивают целевую силу акупрессуры с текущей измеренной силой акупрессуры. Управляют вертикальной высотой акупрессурной секции. Обеспечивается технология для вычисления силы акупрессуры, подходящей для пользователя. 6 з.п. ф-лы, 12 ил., 2 табл.
1. Способ управления силой акупрессуры в реальном времени, причем способ содержит следующие этапы:
(a) установка контрольной вертикальной высоты для каждого горизонтального положения акупрессурной секции и установка целевой силы акупрессуры в диапазоне контрольной вертикальной высоты (S100);
(b) вычисление текущей измеренной силы акупрессуры из данных измерения нагрузки пользователя, приложенной к датчику нагрузки (S200); и
(c) сравнение целевой силы акупрессуры с текущей измеренной силой акупрессуры и управление вертикальной высотой акупрессурной секции (S300).
2. Способ по п. 1, в котором на этапе (с) операции S300:
акупрессурную секцию вертикально опускают или вертикально поднимают, когда текущая измеренная сила акупрессуры больше целевой силы акупрессуры или текущая измеренная сила акупрессуры меньше целевой силы акупрессуры;
при этом акупрессурная секция останавливает вертикальное приведение в движение, когда текущая измеренная сила акупрессуры равна целевой силе акупрессуры.
3. Способ по п. 2, в котором, когда текущая вертикальная высота акупрессурной секции находится вне диапазона контрольной вертикальной высоты, измеренной силе акупрессуры присваивают заданное предельное значение.
4. Способ по п. 1, в котором этап (а) операции S100 дополнительно содержит (а’) применение целевой силы акупрессуры с минимальным значением и определение горизонтального положения, соответствующего точке перегиба измеренного значения тока приведения в движение, подаваемого в двигатель горизонтального приведения в движение в процессе перемещения акупрессурной секции вперед и назад (S110).
5. Способ по п. 4, дополнительно содержащий вычисление значения коррекции для целевой силы акупрессуры путем использования отклонения между вертикальной высотой акупрессурной секции в определенном горизонтальном положении и контрольной вертикальной высотой в горизонтальном положении.
6. Способ по п. 4, в котором вычисляют точку перегиба измеренного значения тока приведения в движение в виде определенного положения позвоночника текущего пользователя, при этом, когда текущее положение позвоночника, соответствующее измеренному значению тока приведения в движение, подаваемого в двигатель горизонтального приведения в движение в процессе горизонтального перемещения акупрессурной секции в процессе массажа, отличается от определенного положения позвоночника, положение точки акупрессуры корректируют со сдвигом на отклонение между текущим положением позвоночника и определенным положением позвоночника.
7. Способ по п. 6, в котором, когда отношение расстояний для точек акупрессуры предыдущих положений позвоночника изменяется на отношение расстояний для точек акупрессуры текущих положений позвоночника вследствие замены пользователя, корректируют отношение для точек акупрессуры.
| ПОЛУСВОБОДНЫЙ ЗАТВОР СТРЕЛКОВОГО ОРУЖИЯ | 2016 |
|
RU2638889C2 |
| US 5545177 A1, 13.08.1996 | |||
| КОМПЛЕКСНОЕ УСТРОЙСТВО ДЛЯ АКУПРЕССУРЫ | 1997 |
|
RU2153316C2 |
| KR 100984026 B1, 28.09.2010 | |||
| JP 2007014442 A, 25.01.2007 | |||
| JP 4982199 B2, 25.07.2012. | |||

