Область техники
Настоящее изобретение относится к массажеру, а более конкретно - к устройству для управления массажером, сконфигурированному для регулировки продолжительности выполнения массажа и силы массажа для схем массажа, выполняемого массажером спины, массажером, тепловым устройством и т.п., и к соответствующему способу управления.
Предпосылки создания изобретения
Обычный массажер с продольным столом измеряет длину нижней части спины пользователя и работает согласно установленной схеме массажа, и в этом случае скорость перемещения приводного тела всегда постоянна. В этом случае, поскольку каждая из нагрузок, прикладываемых к приводному телу, и длина зоны массажа варьируется согласно весу и длине нижней части спины пользователя, продолжительность выполнения массажа может быть разной.
В связи с этим был предложен способ унификации времени, в течение которого завершается массаж, путем выполнения дополнительного массажа или регулировки времени конкретного перемещения.
Однако при вышеописанной работе, поскольку схема массажа фактически меняется, пользователи получают разный массаж. В частности, при демонстрации массажеров и в других подобных случаях, когда для массажа пользователей используется множество массажеров, пользователям невозможно предоставить один и тот же массаж, и практическое сравнение является трудным, и таким образом эффективность демонстрации снижается.
Кроме того, если пользователь произвольно регулирует время массажа, то, поскольку меняется только время массажа, вся схема массажа не выполняется или же часть схемы выполняется повторно, и, таким образом, невозможно обеспечить практический эффект массажа.
Кроме того, поскольку сила массажа задается ступенчато механической конструкцией приводного тела, сконфигурированного для проведения массажа для каждого продукта, изменение конструкции и процесс изготовления приводного тела усложняются, если требуется обеспечить массаж с силой, не предусмотренной заданной ступенью.
Раскрытие изобретения
Техническая задача
Настоящее изобретение направлено на создание устройства для управления массажером, позволяющего легко регулировать продолжительность и силу массажа, и к соответствующему способу.
Техническое решение
Согласно одному из аспектов настоящего изобретения, предложено устройство для управления массажером, содержащее установочный блок, сконфигурированный для установки режима массажа, и управляющий блок, сконфигурированный для управления скоростью перемещения приводного модуля, выполняющего массаж, для регулировки по меньшей мере одного из продолжительности соответствующей схемы массажа и силы массажа согласно режиму массажа, установленному управляющим блоком, и форме тела пользователя.
В варианте осуществления изобретения управляющий блок управляет транспортным двигателем, сконфигурированным для горизонтального перемещения приводного модуля, для регулировки скорости перемещения приводного модуля.
В варианте осуществления изобретения управляющий блок содержит блок вычисления формы тела, сконфигурированный для сканирования тела пользователя для вычисления по меньшей мере одного из веса пользователя и длины спины пользователя; и блок регулировки времени, сконфигурированный для управления скоростью перемещения приводного модуля на основе вычисленной информации о форме теле для регулировки продолжительности выполнения соответствующей схемы массажа.
В варианте осуществления изобретения регулирующий блок осуществляет регулировку так, что установленная схема массажа может быть завершена за одно и то же время, независимо от вычисленного веса и длины спины пользователя.
В варианте осуществления изобретения блок регулировки времени вычисляет скорость перемещения приводного модуля на основе заранее заданной стандартной продолжительности выполнения массажа и длины спины пользователя для соответствующей схемы массажа для регулировки скорости перемещения приводного модуля.
В варианте осуществления изобретения установочный блок содержит блок регулировки времени выполнения, сконфигурированный для установки продолжительности выполнения соответствующей схемы массажа, и этот блок регулировки времени регулирует скорость перемещения приводного модуля так, чтобы соответствующая схема массажа могла быть завершена согласно установленному времени выполнения.
В варианте осуществления изобретения указанный блок регулировки времени регулирует скорость перемещения приводного модуля на основе установленной продолжительности выполнения массажа и длины спины пользователя.
В варианте осуществления изобретения указанный установочный блок содержит блок выбора силы, сконфигурированный для выбора силы массажа, и блок выбора увеличения/уменьшения силы, сконфигурированный для выбора увеличения/уменьшения силы массажа для точной регулировки силы массажа, при этом управляющий блок содержит блок управления силой, сконфигурированный для управления приводным модулем так, чтобы приводной модуль работал с выбранной силой массажа, и блок регулировки силы, сконфигурированный для увеличения или уменьшения скорости перемещения приводного модуля согласно выбору увеличения/уменьшения для регулировки силы массажа.
В варианте осуществления изобретения блок выбора увеличения/уменьшения может выбирать соответствующую силу массажа аналоговым способом.
Согласно другому аспекту настоящего изобретения, предложен способ управления массажером, включающий установку режима массажа, сканирование тела пользователя и вычисление по меньшей мере одного из веса или длины спины пользователя, а также управление скоростью перемещения приводного модуля на основе вычисленной информации о форме тела и регулировке продолжительности выполнения соответствующей схемы массажа.
В варианте осуществления изобретения регулировка включает управление транспортным двигателем, сконфигурированным для горизонтального перемещения приводного модуля, для регулировки скорости перемещения приводного модуля.
В варианте осуществления изобретения регулировка включает такую регулировку, чтобы установленная схема массажа могла быть завершена за одно и то же время, независимо от вычисленного веса и длины спины пользователя.
В варианте осуществления изобретения регулировка включает вычисление скорости перемещения приводного модуля на основе заранее заданной стандартной продолжительности выполнения и длины спины пользователя для соответствующей схемы массажа для регулировки скорости перемещения приводного модуля.
В варианте осуществления изобретения указанная установка включает установку продолжительности выполнения соответствующей схемы массажа, а регулировка включает регулировку скорости перемещения приводного модуля так, чтобы соответствующая схема массажа могла быть завершена согласно установленной продолжительности выполнения.
В варианте осуществления изобретения указанная регулировка может включать регулировку скорости перемещения приводного модуля на основе установленной продолжительности выполнения и длины спины пользователя.
Согласно еще одному аспекту настоящего изобретения, предложен способ управления массажером, включающий установку силы массажа и схемы массажа, управление приводным модулем так, чтобы приводной модуль работал с выбранной силой массажа, выбор увеличения/уменьшения выбранной силы массажа для точной регулировки силы массажа и увеличение или уменьшение скорости перемещения приводного модуля согласно выбору увеличения/уменьшения и регулировке силы массажа.
Полезные эффекты
В устройстве управления массажером согласно варианту осуществления изобретения и в соответствующем способе, поскольку точным временем массажа можно управлять независимо от формы тела пользователя, управляя скоростью приводного модуля согласно форме тела пользователя, надежность массажного эффекта может быть обеспечена без девиаций для каждого пользователя.
Кроме того, в настоящем изобретении, поскольку скорость массажа может быть отрегулирована, и одинаковый массажный эффект для пользователя может быть достигнут согласно времени, желательному для пользователя, путем выполнения одной и той же схемы массажа согласно времени, выбранному пользователем, может быть повышено удобство для пользователя.
Кроме того, в настоящем изобретении, поскольку сила массажа может непрерывно варьироваться путем ступенчатого изменения силы массажа приводным модулем и регулировке скорости приводного модуля для обеспечения средней силы массажа, пользователь легко может выбрать желательную силу массажа согласно форме тела или состоянию здоровья.
Описание чертежей
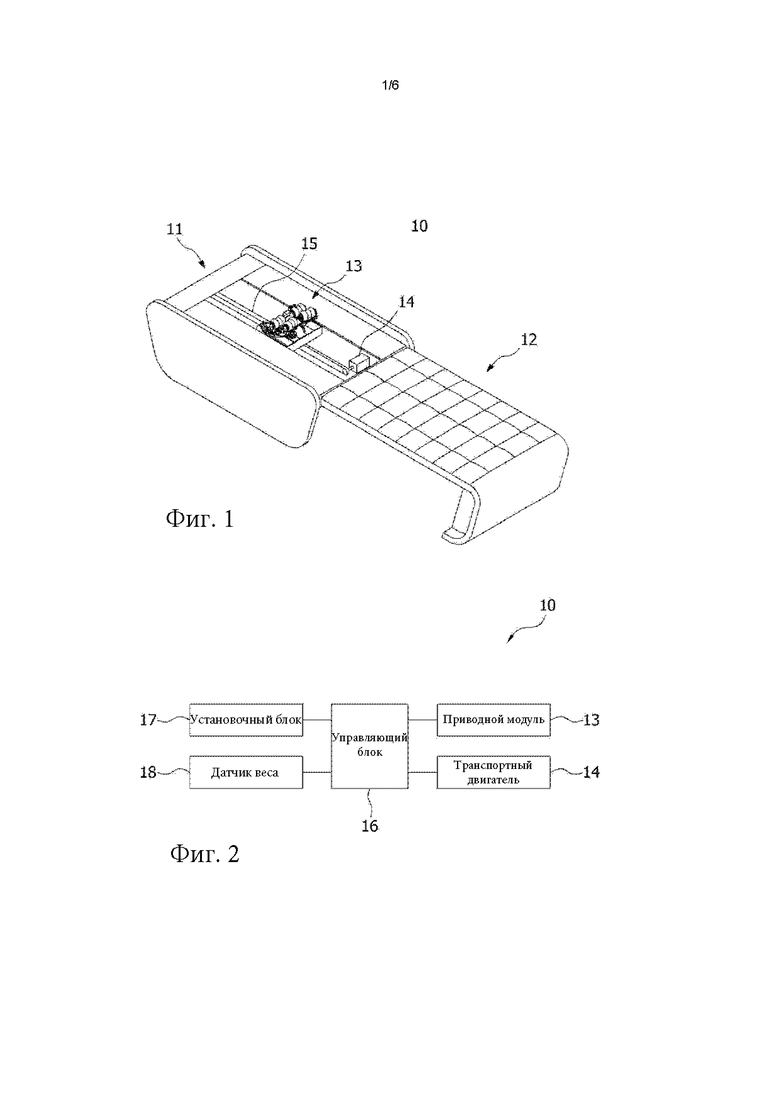
На фиг. 1 показан вид массажера в перспективе согласно одному из вариантов осуществления изобретения;
на фиг. 2 показана блок-схема, иллюстрирующая массажер, показанный на фиг. 1;
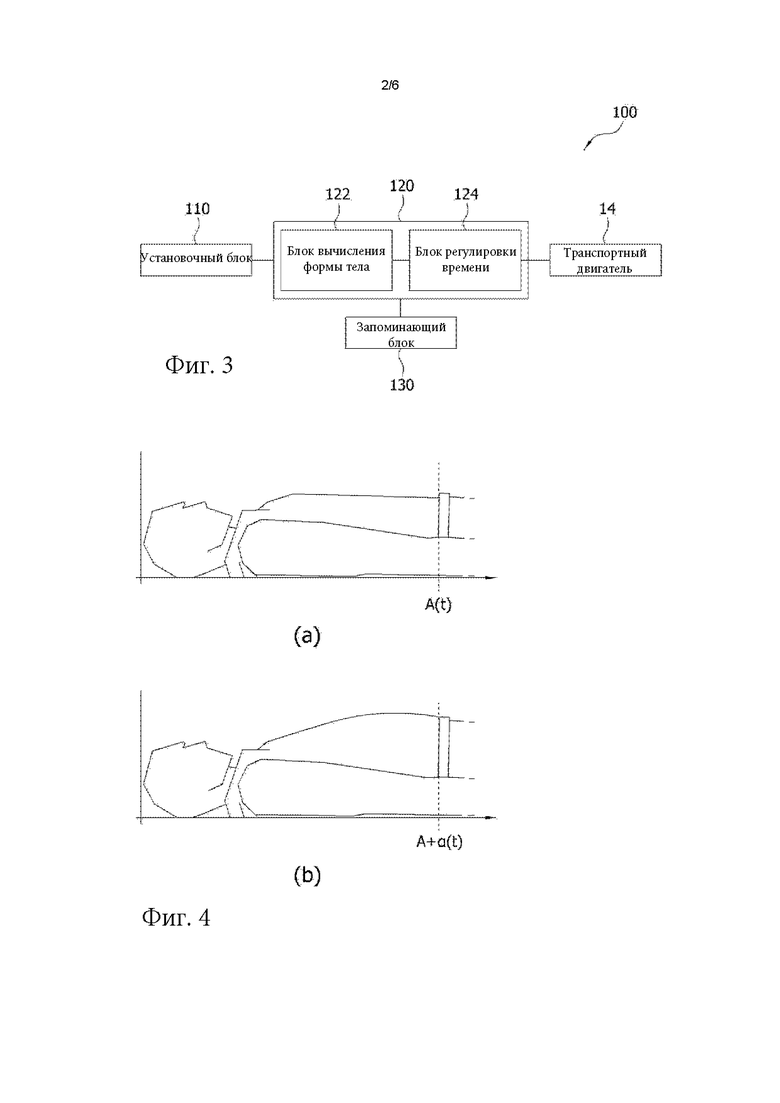
на фиг. 3 показана блок-схема, иллюстрирующая устройство для управления массажером согласно варианту осуществления изобретения;
на фиг. 4 иллюстрируется скорость перемещения приводного модуля, когда пользователи имеют одинаковый рост и различный вес;
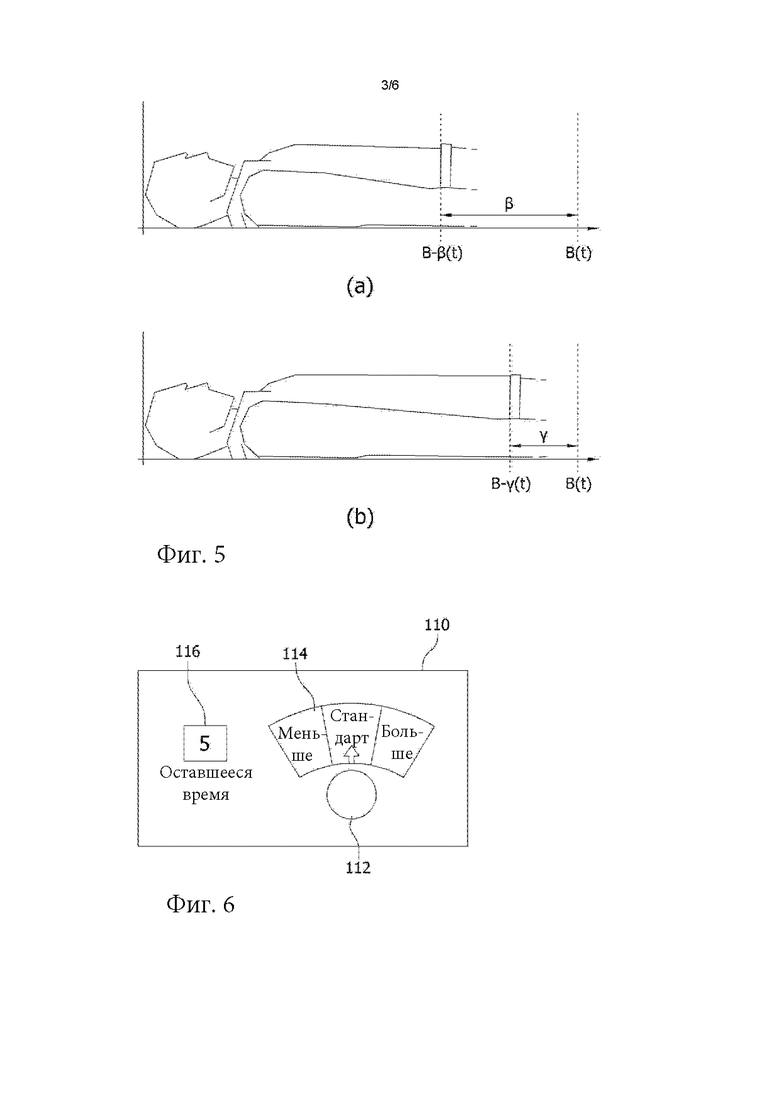
на фиг. 5 иллюстрируется скорость перемещения приводного модуля, когда пользователи имеют одинаковый вес и различный рост;
на фиг. 6 иллюстрируется пример установочного блока, показанного на фиг. 3;
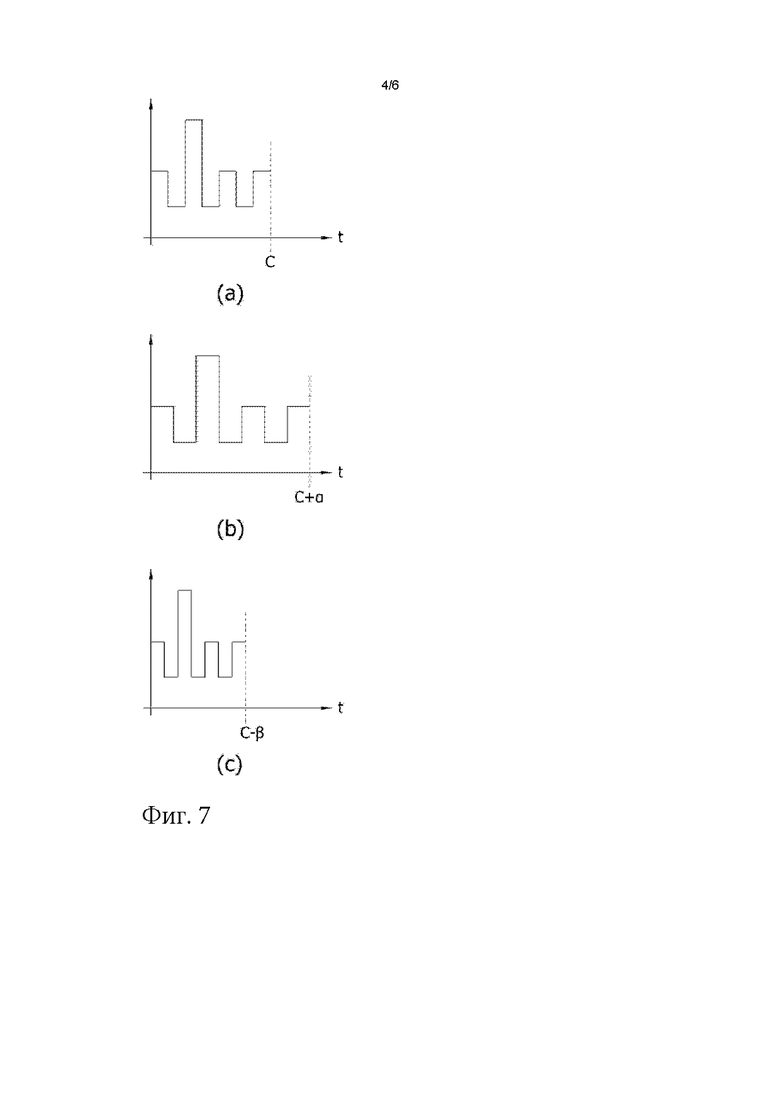
на фиг. 7 показана временная диаграмма, иллюстрирующая схему массажа согласно регулировке продолжительности массажа;
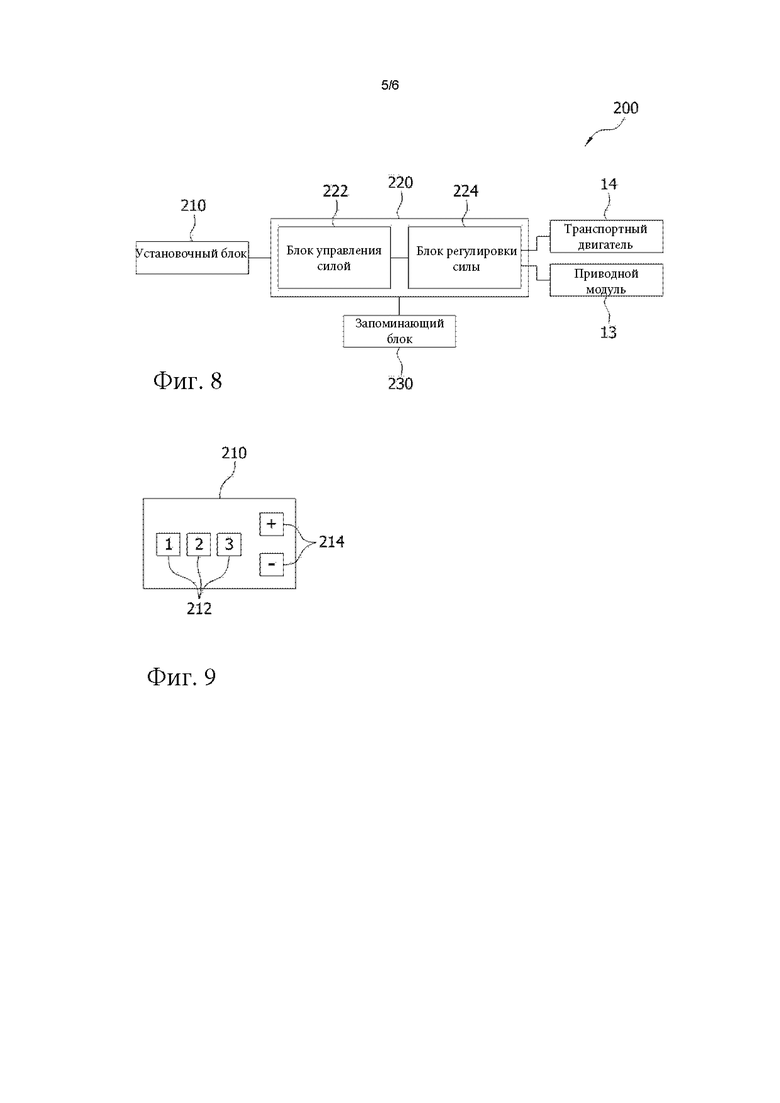
на фиг. 8 показана блок-схема, иллюстрирующая другой пример устройства для управления массажером согласно указанному варианту осуществления изобретения;
на фиг. 9 иллюстрируется пример установочного блока, показанного на фиг. 8;
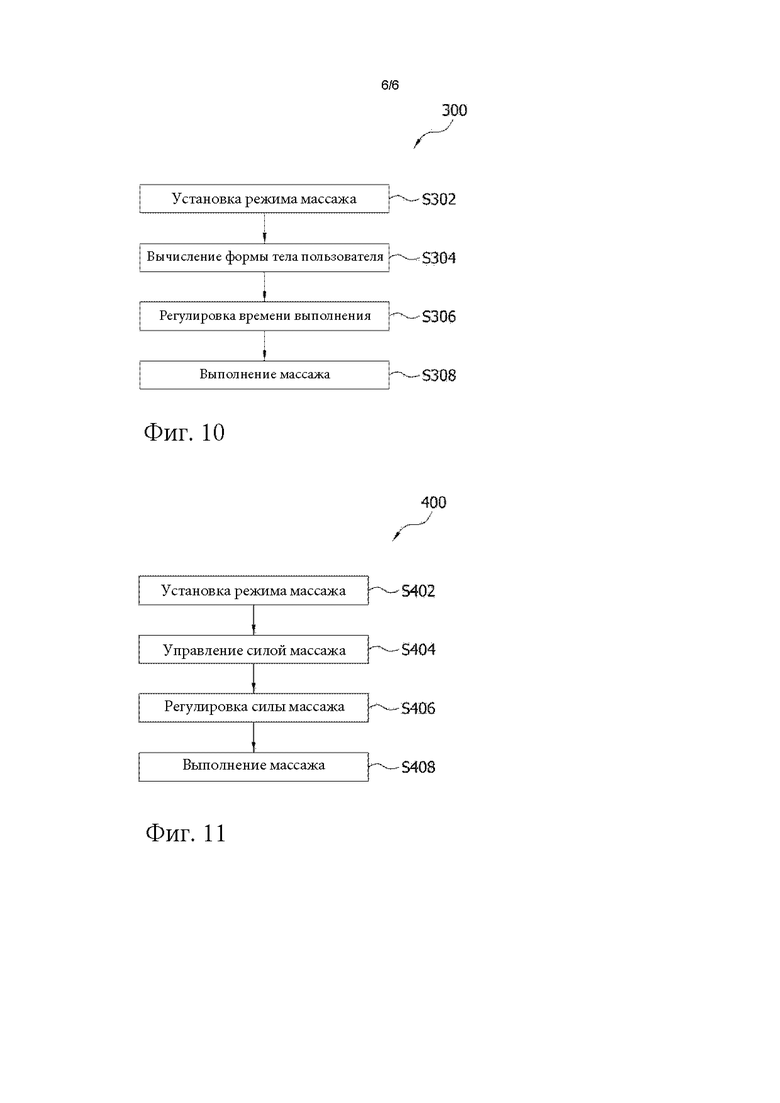
на фиг. 10 показана блок-схема алгоритма, иллюстрирующая способ управления массажером согласно варианту осуществления изобретения; и
на фиг. 11 показана блок-схема алгоритма, иллюстрирующая другой пример способа управления массажером согласно варианту осуществления изобретения.
Варианты осуществления изобретения
Ниже варианты осуществления изобретения, представленные в качестве примера, описаны подробно со ссылками на сопровождающие чертежи, которые позволят специалисту в данной области техники легко реализовать настоящее изобретение. Это изобретение может быть реализовано в различных формах и не ограничено описанными далее вариантами его выполнения. Компоненты, не связанные с описанием, на чертежах опущены для ясности описания, и одинаковыми позициями обозначены одинаковые или аналогичные компоненты.
Ниже со ссылками на сопровождающие чертежи более подробно описано устройство управления массажером согласно одному из вариантов осуществления изобретения. На фиг. 1 показан вид в перспективе, иллюстрирующий массажер согласно варианту осуществления изобретения, а на фиг. 2 показана блок-схема массажера, показанного на фиг. 1.
На фиг. 1 и 2 массажер 10, в котором использовано устройство 100 для управления массажером согласно варианту осуществления изобретения, содержит верхнюю часть 11, нижнюю часть 12, приводной модуль 13, транспортный двигатель 14 и транспортный блок 15.
При этом массажер 10 может включать массажер спины, массажер любого назначения или тепловое устройство, может быть устройством, сконфигурированным для перемещения по частям тела пользователя с использованием транспортного двигателя 14 для периодической вибрации или похлопывания по этим частям тела, и не имеет никаких ограничений на свою форму.
Далее, как показано на фиг. 1, массажер 10 содержит ложе, в котором пользователь лежит для проведения массажа, или сидение, на котором пользователь сидит для проведения массажа, и не имеет никаких ограничений на их форму.
Верхняя часть 11 и нижняя часть 12 могут быть расположены параллельно друг другу. В некоторой области верхней части 11 может иметься свободное пространство и может содержаться приводной модуль 13, транспортный двигатель 14 и транспортный блок 15, сконфигурированные для проведения массажа. Нижняя часть 12 может скользить в одном направлении относительно верхней части.
Приводной модуль 13 может выполнять по меньшей мере одно из следующего: массаж и тепловое воздействие - для каждой части тела пользователя. При этом приводной модуль 13 может быть керамическим модулем для теплового воздействия.
Приводной модуль 13 может перемещаться в одном направлении в верхней части 11 транспортным двигателем 14 и транспортным блоком 15. Кроме того, в приводном модуле 13 можно регулировать высоту его части, которая входит в контакт с телом, в зависимости от требуемой силы массажа.
Как показано на фиг. 2, массажер 10 может дополнительно содержать управляющий блок 16, установочный блок 17 и датчик 18 веса.
Управляющий блок 16 может управлять установкой и рабочими характеристиками режима массажа. В установочном блоке 17 режим выполняемого массажа может быть установлен пользователем. Датчик 18 веса может быть помещен в приводном модуле 13, чтобы измерять давление, создаваемое телом пользователя.
Ниже более подробно описано управляющее устройство 100, сконфигурированное для управление вышеописанным массажером 10. На фиг. 3 показана блок-схема, иллюстрирующая устройство для управления массажером согласно варианту осуществления изобретения.
На фиг. 3 устройство 100 для управления массажером содержит установочный блок 110, управляющий блок 120 и запоминающий блок 130. При этом установочный блок 110 и управляющий блок 120 могут быть выполнены как элементы управляющего блока 16 и установочного блока 17, показанного на фиг. 2.
Установочный блок 110 может устанавливать режим массажа для массажера 10. В установочном блоке 110 режим массажа может устанавливать пользователь. При этом режим массажа может включать схему массажа, силу массажа и продолжительность массажа.
Управляющий блок 120 может управлять скоростью перемещения приводного модуля 13, сконфигурированного для выполнения массажа, чтобы отрегулировать по меньшей мере одно из следующего: продолжительность выполнения и силу массажа для соответствующей схемы массажа согласно режиму массажа, установленному установочным блоком 110, и форме тела пользователя.
При этом управляющий блок 120 может управлять транспортным двигателем 14, сконфигурированным для горизонтального перемещения приводного модуля 13, для регулировки скорости перемещения приводного модуля 13. Управляющий блок 120 может содержать блок 122 вычисления формы тела и блок 124 регулировки времени.
Блок 122 вычисления формы тела может сканировать тело пользователя для вычисления по меньшей мере одного из веса и длины спины пользователя. При этом под длиной спины подразумевается длина нижней части спины пользователя, на которой производится массаж.
В этом случае блок 122 вычисления формы тела может вычислить вес пользователя согласно давлению тела, измеренному датчиком 18 веса, при сканировании пользователя с использованием приводного модуля 13.
Кроме того, блок 122 вычисления формы тела может измерять токи для каждого местоположения транспортного двигателя 14 для вычисления длины спины пользователя согласно вариациям токов.
Блок 124 регулировки времени может управлять скоростью перемещения приводного модуля 13 на основе информации о форме тела, вычисленной блоком 122 вычисления формы тела, для регулировки продолжительности выполнения соответствующей схемы массажа.
При этом скорость перемещения приводного модуля 13 меняется согласно форме тела пользователя. На фиг. 4 иллюстрируется скорость перемещения приводного модуля, когда пользователи имеют одинаковый рост и различный вес, а на фиг. 5 иллюстрируется скорость перемещения приводного модуля, когда пользователи имеют одинаковый вес и различный рост.
Как показано на фиг. 4, когда рост (то есть, длина нижней части спины) одинаков, но веса отличаются, время окончания массажа меняется в зависимости от веса пользователя для одной и той же схемы массажа. Например, в случае, показанном на фиг. 4А, когда вес мал, время окончания массажа может быть A(t), а в случае, показанном на фиг. 4В, когда вес большой, время окончания массажа может быть A+α(t).
При этом, когда рост одинаков, длины перемещения приводного модуля 13 одинаковы. Однако, поскольку нагрузка на приводной модуль 13 меняется из-за различия в весе, скорость перемещения приводного модуля 13 меняется пропорционально разности между весами для одной и той же схемы массажа. Соответственно, в случае, показанном на фиг. 4 В, когда вес больше, появляется разность α между значениями времени окончания массажа по сравнению со случаем, показанным на фиг. 4А, когда вес мал.
Кроме того, как показано на фиг. 3, когда веса одинаковы, но рост (то есть, длина нижней части спины) различается, время окончания массажа меняется в зависимости от роста пользователя для одной и той же схемы массажа. Например, для стандартного времени B(t) окончания в соответствующей схеме массажа, в случае, показанном на фиг. 5А, когда рос мал, время окончания массажа может уменьшиться на β и, таким образом, будет составлять B-β(t), а в случае, показанном на фиг. 5 В, когда рост большой, время окончания массажа может уменьшиться на γ и, таким образом, будет составлять В-γ(t).
При этом, когда веса одинаковые, нагрузка на приводной модуль 13 одинаковая. Однако, поскольку длина, на которую приводной модуль 13 должен переместиться вследствие разности в росте, меняется, длина перемещения приводного модуля 13 меняется на разность между ростами для той же самой схемы массажа. Соответственно, в случае, показанном на фиг. 5 В, когда рост большой, время окончания массажа может быть уменьшено на разность (γ-β) по сравнению со случаем, показанным на фиг. 5А, когда рост мал.
Как описано выше, поскольку скорость перемещения приводного модуля 13 меняется согласно форме тела пользователя для той же схемы массажа, пользователи может ощущать другое воздействие. В частности, в таком случае как демонстрация и т.п., когда множество пользователей испытывают воздействие массажа, время окончания массажа для пользователей может отличаться, или предложенные схемы массажа могут отличаться. Соответственно, время окончания массажа должно быть отрегулировано так, чтобы не зависеть от пользователя.
С этой целью блок 124 регулировки времени может быть отрегулирован так, чтобы схема массажа, установленная установочным блоком 110, могла быть завершена за одно и то же время независимо от веса и длины спины пользователя.
Более конкретно, во-первых, блок 124 регулировки времени может быть отрегулирован так, чтобы скорость перемещения приводного модуля 13 могла меняться равномерно согласно вариации нагрузки, действующей на приводной модуль 13 вследствие веса пользователя. В этом случае блок 124 регулировки времени может осуществлять управление в режиме реального времени, измеряя скорость перемещения приводного модуля 13 и стремясь к целевой скорости перемещения.
Кроме того, блок 124 регулировки времени может вычислять скорость перемещения приводного модуля 13 на основе заранее заданной стандартной продолжительности выполнения и длины спины пользователя для соответствующей схемы массажа. При этом скорость перемещения приводного модуля 13 может быть вычислена с учетом длины спины пользователя и стандартной продолжительности выполнения.
Кроме того, блок 124 регулировки времени может управлять транспортным двигателем 14 для перемещения приводного модуля 13 с отрегулированной скоростью перемещения. Например, блок 124 регулировки времени может управлять транспортным двигателем 14 путем управления приводными токами транспортного двигателя 14.
Соответственно, поскольку устройство 100 управления массажером может точно управлять временем массажа независимо от формы тела пользователя, надежность массажного воздействия можно обеспечить без девиации для каждого пользователя.
В то же время устройство 100 управления массажером может регулировать продолжительность выполнения одной и той же схемы массажа по выбору пользователя. На фиг. 6 иллюстрируется пример установочного блока, показанного на фиг. 3, а на фиг. 7 показана временная диаграмма, иллюстрирующая схему массажа согласно регулировке продолжительности массажа.
Для этого в установочном блоке 110 продолжительность выполнения соответствующей схемы массажа может быть установлена пользователем. В качестве примера на фиг. 6 показано, что установочный блок 110 может содержать блок 112 регулировки продолжительности выполнения, блок 114 отображения продолжительности выполнения и блок 116 отображения оставшегося времени.
Блок 112 регулировки продолжительности выполнения может быть переключателем дискового типа или кнопочного типа, позволяющим выбрать продолжительность массажа, отображаемую блоком 114 отображения продолжительности выполнения.
Блок 114 отображения продолжительности выполнения может отображать продолжительность и будет описан ниже. При этом, как описано выше, имеется стандарт для выполнения соответствующей схемы массажа за одно то же время независимо от формы тела пользователя, и предусмотрено уменьшение и увеличение продолжительности выполнения согласно выбору пользователя и выполнение соответствующей схемы массажа в течение уменьшенного или увеличенного времени по сравнению с указанным стандартом.
На фиг. 6, хотя блок 114 отображения продолжительности выполнения показан и описан с тремя градациями, включающими уменьшенное, стандартное и увеличенное время, уменьшенное и увеличенное время может включать множество градаций или последовательных аналоговых градаций.
Блок 116 отображения оставшегося времени может отображать оставшееся время соответствующего режима массажа при выполнении массажа согласно выбранной продолжительности выполнения. Соответственно, пользователь может легко регулировать продолжительность массажа.
В этом случае блок 124 регулировки времени может регулировать скорость перемещения приводного модуля 13 так, чтобы соответствующая схема массажа могла завершиться согласно продолжительности выполнения, установленной установочным блоком 110. Таким образом, блок 124 регулировки времени может вычислять скорость перемещения приводного модуля 13 на основе установленной продолжительности выполнения и измеренной длины спины пользователя.
При этом блок 124 регулировки времени может управлять приводными токами транспортного двигателя 14 для перемещения приводного модуля 13 с отрегулированной скоростью перемещения.
Как показано на фиг. 7, в случае, показанном на фиг. 7А, когда схема массажа выполняется со стандартной скоростью перемещения, предполагается, что стандартная продолжительность массажа равна C(t). При этом схема массажа имеет заранее заданную конфигурацию и может представлять собой силу и скорость, с которыми тело пользователя обстукивается или массажируется. Таким образом, схема массажа может быть схемой работы приводного модуля 13.
В этом случае, как показано на фиг. 7В, где продолжительность выполнения массажа увеличена для более обстоятельного массажа по сравнению со стандартной продолжительностью массажа, блок 124 регулировки времени может управлять работой так, чтобы схема массажа линейно увеличивалась до заданного времени (С+α). Таким образом, блок 124 регулировки времени может управлять так, чтобы скорость перемещения приводного модуля 13 уменьшилась, и увеличилась продолжительность схемы массажа по оси времени по сравнению со случаем стандартной скорости перемещения, показанной на фиг. 7А, чтобы сохранить ту же самую схему массажа, даже когда продолжительность массажа увеличивается.
Кроме того, в случае фиг. 7С, в котором продолжительность массажа уменьшена для более быстрого массажа по сравнению со стандартной продолжительностью массажа, блок 124 регулировки времени может управлять работой так, чтобы продолжительность выполнения схемы массажа линейно уменьшилась до установленного времени (С-β). Таким образом, блок 124 регулировки времени может управлять так, чтобы скорость перемещения приводного модуля 13 увеличилась, и уменьшилась продолжительность схемы массажа по оси времени по сравнению со случаем стандартной скорости перемещения, показанным на фиг. 7А, чтобы сохранить ту же самую схему массажа, даже когда продолжительность массажа уменьшается.
Соответственно, поскольку устройство 100 для управления массажером может регулировать скорость массажа согласно времени, желательному для пользователя, и может обеспечить тот же массажный эффект для пользователя, удобство для пользователя может быть повышено.
Информация, связанная с регулировкой продолжительности массажа в управляющем блоке 120, может храниться в запоминающем блоке 130. При этом заранее заданная стандартная продолжительность выполнения для каждой схемы массажа и скорость перемещения, вычисленная согласно измеренной информации о форме тела (длина спины и/или вес), могут также храниться в запоминающем блоке 130.
Кроме того, устройство для управления массажером согласно варианту осуществления изобретения может обеспечивать регулировку силы массажа в последовательно-аналоговом режиме. На фиг. 8 показана блок-схема, иллюстрирующая другой пример устройства управления массажером согласно этому варианту осуществления изобретения, а на фиг. 9 показан пример установочного блока, показанного на фиг. 8.
Устройство 200 для управления массажером содержит установочный блок 210, управляющий блок 220 и запоминающий блок 230.
Установочный блок 210 может выбрать или точно отрегулировать силу массажа. Например, как показано на фиг. 9, установочный блок 210 может содержать блок 212 выбора силы и блок 214 выбора увеличения/уменьшения.
Блок 212 выбора силы может выбирать силу массажа. При этом блок 212 выбора силы может содержать множество кнопок, сконфигурированных для показа ступенчатой силы массажа, но этим он не ограничен и может обеспечивать ступенчатый выбор силы массажа согласно введенному числу и т.п.
Блок 214 выбора увеличения/уменьшения может выбрать увеличение/уменьшение силы массажа, выбранной блоком 212 выбора силы, для точной регулировки выбранной силы массажа. При этом блок 214 выбора увеличения/уменьшения может выбирать силу массажа в аналоговом режиме. В этом случае блок 214 выбора увеличения/уменьшения может содержать кнопку (+) увеличения или кнопку (-) уменьшения, но этим не ограничен и может обеспечивать точный выбор силы массажа в аналоговом режиме с использованием диска и т.п. Соответственно, пользователь может легко отрегулировать желательную силу массажа.
Управляющий блок 220 может регулировать силу массажа так, чтобы сила массажа, установленная установочным блоком 210, могла быть обеспечена в аналоговом режиме. Управляющий блок 220 может содержать блок 222 управления силой и блок 224 регулировки силы.
Блок 222 управления силой 222 может управлять приведением приводного модуля 13 в действие с силой массажа, установленной установочным блоком 210.
Блок 224 регулировки силы может увеличить или уменьшить скорость перемещения приводного модуля 13 согласно выбору увеличения/уменьшения, точно отрегулированному установочным блоком 210, для регулировки силы массажа.
При этом, когда скорость перемещения приводного модуля 13 увеличивается при той же силе массажа, сила массажа, которую ощущает пользователь, может увеличиться пропорционально увеличивающейся скорости перемещения, а когда скорость перемещения приводного модуля 13 уменьшается, сила массажа, которую ощущает пользователь, может уменьшаться пропорционально уменьшающейся скорости перемещения. Вариацию вышеуказанной скорости перемещения приводного модуля 13 и силы массажа можно заранее вычислить экспериментально и сохранить в запоминающем блоке 230.
Соответственно, блок 224 регулировки силы может регулировать скорость перемещения приводного модуля 13, приводимого в движение с установленной силой массажа, для регулировки силы массажа. Таким образом, сила массажа может быть точно отрегулирована между ступенчатыми уровнями силы массажа, обеспечиваемыми приводным модулем 13.
Информация, связанная с регулировкой силы массажа в управляющем блоке 220, может храниться в запоминающем блоке 230. При этом значение вариации силы массажа согласно уровню силы массажа и скорости перемещения приводного модуля 13 также может храниться в запоминающем блоке 230.
Соответственно, поскольку сила массажа в устройстве 200 управления массажером может изменяться непрерывно, пользователь может легко выбрать желательную силу массажа согласно форме тела или состоянию здоровья пользователя.
Ниже со ссылками на фиг. 10 и 11 описан способ управления массажером согласно настоящему изобретению. На фиг. 10 показана блок-схема алгоритма, иллюстрирующая способ управления массажером согласно варианту осуществления изобретения. При этом способ 300 управления массажером призван унифицировать скорость массажа независимо от формы тела пользователя или обеспечить одну и ту же схему массажа согласно значениям времени, установленным пользователем.
Способ 300 управления массажером включает установку (S302) режима массажа, вычисление (S304) формы тела пользователя, регулировку (S306) продолжительности массажа и выполнение (S308) массажа.
Более конкретно, как показано на фиг. 10, сначала пользователь устанавливает (S302) режим массажа в устройстве 100 управления массажером. В этом случае режим массажа может содержать схему массажа, силу массажа и продолжительность массажа.
Кроме того, устройство 100 управления массажером сканирует тело пользователя для вычисления (S304) формы тела пользователя. При этом по фигуре пользователя можно вычислить одно из следующего: вес и длину спины пользователя.
В этом случае вес пользователя может быть вычислен согласно давлению тела, измеренному датчиком 18 веса во время сканирования пользователя с использованием приводного модуля 13. Кроме того, длина спины пользователя может быть вычислена согласно вариации токов путем измерения токов для каждого местоположения приводного двигателя 14.
Кроме того, устройство 100 управления массажером может регулировать (S306) продолжительность выполнения соответствующей схемы массажа на основе вычисленной информации о теле. В этом случае продолжительность выполнения соответствующей схемы массажа можно регулировать путем регулировки скорости перемещения приводного модуля 13. При этом, как описано в отношении фиг. 3 и 6, поскольку скорость перемещения приводного модуля 13 меняется согласно форме тела пользователя для одной и той же схемы массажа, время окончания массажа должно быть отрегулировано одинаково независимо от пользователя.
С этой целью схема массажа, установленная пользователем, может быть отрегулирована так, чтобы массаж завершился за одно и то же время независимо от веса и длины спины пользователя. В этом случае транспортным двигателем 14, сконфигурированным для горизонтального перемещения приводного модуля 13, можно управлять для регулировки скорости перемещения приводного модуля 13.
Более конкретно, во-первых, скорость перемещения приводного модуля 13 может быть отрегулирована так, чтобы скорость перемещения приводного модуля 13 могла меняться равномерно согласно вариации нагрузки, приложенной к приводному модулю 13 весом пользователя. В этом случае скоростью перемещения приводного модуля 13 можно управлять в режиме реального времени, измеряя скорость перемещения приводного модуля 13 для следования целевой скорости перемещения.
Кроме того, скорость перемещения приводного модуля 13 может быть вычислена на основе заранее заданной стандартной продолжительности выполнения и длины спины пользователя для соответствующей схемы массажа. При этом скорость перемещения приводного модуля 13 может быть вычислена на основе длины спины пользователя и стандартной продолжительности выполнения.
Далее устройство 100 управления массажером выполняет (S308) массаж согласно отрегулированной продолжительности выполнения. В этом случае массаж может быть выполнен с использованием установленной схемы массажа и силы массажа для отрегулированной продолжительности выполнения.
В вышеописанном способе, поскольку точным временем массажа можно управлять независимо от формы тела пользователя, надежность массажного эффекта может быть обеспечена без девиации для каждого пользователя.
При этом способ 300 управления массажером позволяет регулировать продолжительность выполнения одной и той же схемы массажа согласно выбору пользователя.
С этой целью на шаге S302 пользователем может быть установлена продолжительность выполнения соответствующей схемы массажа. В этом случае может быть выбран один из режимов: стандартный, уменьшенный и увеличенный. При этом, как описано выше, стандартный режим обеспечивает завершение соответствующей схемы массажа в одно и то же время независимо от формы тела пользователя, а уменьшенный и увеличенные режимы предоставлены, чтобы регулировать продолжительность выполнения согласно выбору пользователя и выполнять соответствующую схему массажа в течение уменьшенного или увеличенного времени по сравнению со стандартным.
В этом варианте осуществления изобретения, хотя показаны и описаны три режима, включающие уменьшенный, стандартный и увеличенный, режимы уменьшения и увеличения могут включать множество градаций или последовательных значений в аналоговом режиме.
Далее, на шаге S306, скорость перемещения приводного модуля 13 можно регулировать так, чтобы соответствующая схема массажа могла быть завершена согласно продолжительности выполнения, установленной пользователем. Таким образом, скорость перемещения приводного модуля 13 может быть вычислена на основе продолжительности выполнения, установленной пользователем, и длины спины пользователя, измеренной на шаге S304. В этом случае приводными токами транспортного двигателя 14 можно управлять для перемещения приводного модуля 13 с отрегулированной скоростью перемещения.
В этом случае, как описано со ссылкой на фиг. 7, когда продолжительность массажа увеличивается, схемой массажа можно управлять так, чтобы ее продолжительность линейно увеличилась до времени, установленного пользователем. Таким образом, управляют так, что скорость перемещения приводного модуля уменьшается, и схема массажа приводного модуля 13 увеличивается по оси времени по сравнению со случаем стандартной скорости перемещения, чтобы сохранить ту же схему массажа, даже когда продолжительность массажа увеличивается.
Кроме того, когда продолжительность выполнения массажа уменьшается, схемой массажа можно управлять так, чтобы его продолжительность линейно уменьшилась до времени, установленного пользователем. Таким образом, управляют так, что скорость перемещения приводного модуля 13 увеличивается, и схема массажа приводного модуля 13 уменьшается по оси времени по сравнению со случаем стандартной скорости перемещения, чтобы сохранить ту же схему массажа, даже когда продолжительность массажа уменьшилась.
В этом случае, как описано выше, скорость приводного модуля 13 может регулироваться на основе разности между скоростями приводного модуля 13 вследствие нагрузки, действующей на приводной модуль 13 в соответствии с весом пользователя.
Соответственно, поскольку скорость массажа может регулироваться, и одинаковый массажный эффект может быть обеспечен пользователю согласно времени, желательному для пользователя, удобство для пользователя повышается.
Также способ управления массажером согласно настоящему изобретению может обеспечить ступенчатое изменение силы массажа. На фиг. 11 показана блок-схема, иллюстрирующая другой пример способа управления массажером согласно варианту осуществления изобретения.
Способ 400 управления массажером включает установку (S402) режима массажа, управление (S404) силой массажа, регулировку (S406) силы массажа и выполнение (S408) массажа.
Более подробно, как показано на фиг. 11, вначале пользователь устанавливает (S402) режим массажа в устройстве 200 для управления массажером. В этом случае сила массажа и схема массажа устанавливается как режим массажа. При этом сила массажа может быть установлена множеством кнопок ступенчатой регулировки.
Кроме того, устройство 200 для управления массажером управляет (S404) работой приводного модуля 13, обеспечивая силу массажа в режиме массажа, установленном пользователем. Как описано выше, пользователь может выбрать увеличение/уменьшение силы массажа, чтобы точно регулировать силу массажа и выполнять массаж с установленной силой массажа.
Кроме того, устройство 200 управления массажером увеличивает или уменьшает скорость перемещения приводного модуля 13 согласно выбору увеличения/уменьшения, точно регулируемого пользователем, для регулировки силы массажа, выполняемого приводным модулем 13 (S406).
При этом, поскольку скорость перемещения приводного модуля 13 увеличивается или уменьшается при одной и той же силе массажа, сила массажа, которую ощущает пользователь, может также увеличиваться или уменьшаться. В этом случае скорость перемещения приводного модуля 13 и значение вариации силы массажа может быть экспериментально вычислено заранее и сохранено.
Соответственно, сила массажа может быть точно отрегулирована в промежутках между ступенчатыми уровнями силы массажа путем регулировки скорости перемещения приводного модуля 13, приводимого в движение с установленной силой массажа.
Кроме того, устройство 200 управления массажером выполняет (S408) массаж согласно регулируемой силе массажа. В этом случае, поскольку приводной модуль 13 выполняет массаж с использованием установленной схемы массажа и заданного уровня силы массажа, и скорость перемещения приводного модуля 13 увеличена, массаж может быть выполнен с отрегулированной силой массажа.
Соответственно, поскольку сила массажа может изменяться непрерывно, пользователь может легко выбрать желательную силу массажа согласно форме тела или состоянию здоровья.
Вышеописанные способы могут быть осуществлены устройствами 100 и 200 для управления массажером, показанными на фиг. 3 и 8, а в частности, могут быть реализованы в виде программ, сконфигурированных для выполнения описанных выше шагов, и в этом случае программы могут храниться на считываемом компьютером носителе или передаваться в виде компьютерных сигналов данных на несущей волне в передающих средах или по сети.
В этом случае считываемый компьютером носитель включает все виды записывающих устройств, в которых хранятся считываемые компьютером данные, например, постоянное запоминающее устройство (ROM), запоминающее устройство с произвольной выборкой (RAM), компакт-диск (CD-ROM), постоянное запоминающее устройство формата DVD (ROM DVD), запоминающее устройство с произвольной выборкой формата DVD (RAM DVD), магнитную ленту, дискету, жесткий диск, оптическое устройство хранения данных и т.д.
Хотя выше описан один вариант осуществления изобретения, объем настоящего изобретения не ограничен этим вариантом осуществления, и специалисты в данной области техники могут предложить другие варианты путем добавления, изменения или изъятия некоторых элементов в рамках сущности настоящего изобретения, при этом такие варианты осуществления изобретения также входят в его объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕРМОТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2018 |
|
RU2725967C1 |
| СПОСОБ УПРАВЛЕНИЯ УСИЛИЕМ АКУПРЕССУРЫ И СКАНИРОВАНИЕМ ТЕЛА В РЕАЛЬНОМ ВРЕМЕНИ | 2016 |
|
RU2726475C1 |
| СПОСОБ УПРАВЛЕНИЯ УСИЛИЕМ АКУПРЕССУРЫ И СКАНИРОВАНИЕМ ТЕЛА В РЕАЛЬНОМ ВРЕМЕНИ | 2016 |
|
RU2704217C1 |
| ПЕРЕМЕЩАЮЩИЙСЯ МАССАЖЕР И СПОСОБ ОСУЩЕСТВЛЕНИЯ МАССАЖА С ЕГО ПОМОЩЬЮ | 2013 |
|
RU2551939C1 |
| МАССАЖНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ БИОСИГНАЛОВ | 2021 |
|
RU2836676C1 |
| ГОРИЗОНТАЛЬНЫЙ МАССАЖЕР | 2004 |
|
RU2318486C2 |
| РЕГУЛИРОВОЧНОЕ УСТРОЙСТВО МАССАЖНОГО РОЛИКА, РАБОТАЮЩЕГО НА ОСНОВЕ КОЛЕБАТЕЛЬНОГО МЕТОДА ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ ПОЗВОНОЧНОГО СУСТАВА | 2021 |
|
RU2777946C1 |
| МАССАЖЕР | 2019 |
|
RU2756932C1 |
| Массажер | 2019 |
|
RU2711495C1 |
| ПЕРЕНОСНОЙ ВАКУУМНЫЙ МАССАЖЕР | 2001 |
|
RU2187294C1 |
Группа изобретений относится к управлению массажером применительно к регулировке режима массажа. Устройство для управления массажером содержит: установочный блок, сконфигурированный для установки режима массажа, и управляющий блок, сконфигурированный для управления скоростью перемещения приводного модуля, выполняющего массаж, для регулировки по меньшей мере одного из продолжительности выполнения схемы массажа и силы массажа согласно режиму массажа, установленному управляющим блоком, и форме тела пользователя. При этом управляющий блок содержит блок вычисления формы тела, сконфигурированный для сканирования тела пользователя для вычисления информации о форме тела, включающей по меньшей мере одно из веса пользователя и длины спины пользователя. Также управляющий блок содержит блок регулировки времени, сконфигурированный для управления скоростью перемещения приводного модуля на основе информации о форме тела для регулировки продолжительности выполнения упомянутой схемы массажа и для регулировки так, что упомянутая схема массажа завершается за одно и то же время независимо от информации о форме тела. Помимо этого представлен способ управления массажером. Достигается легкость регулирования продолжительности и силы массажа. 2 н. и 10 з.п. ф-лы, 11 ил.
1. Устройство для управления массажером, содержащее: установочный блок, сконфигурированный для установки режима массажа, и управляющий блок, сконфигурированный для управления скоростью перемещения приводного модуля, выполняющего массаж, для регулировки по меньшей мере одного из продолжительности выполнения схемы массажа и силы массажа, согласно режиму массажа, установленному управляющим блоком, и форме тела пользователя,
при этом управляющий блок содержит:
блок вычисления формы тела, сконфигурированный для сканирования тела пользователя для вычисления информации о форме тела, включающей по меньшей мере одно из веса пользователя и длины спины пользователя; и
блок регулировки времени, сконфигурированный для управления скоростью перемещения приводного модуля на основе информации о форме тела для регулировки продолжительности выполнения упомянутой схемы массажа и для регулировки так, что упомянутая схема массажа завершается за одно и то же время независимо от информации о форме тела.
2. Устройство по п. 1, в котором управляющий блок управляет транспортным двигателем, сконфигурированным для горизонтального перемещения приводного модуля, для регулировки скорости перемещения приводного модуля.
3. Устройство по п. 1, в котором блок регулировки времени вычисляет скорость перемещения приводного модуля на основе заранее заданной стандартной продолжительности выполнения и длины спины пользователя для схемы массажа для регулировки скорости перемещения приводного модуля.
4. Устройство по п. 1, в котором:
установочный блок содержит блок регулировки времени выполнения, сконфигурированный для установки продолжительности выполнения схемы массажа; и
блок регулировки времени регулирует скорость перемещения приводного модуля так, чтобы схема массажа завершалась согласно установленному времени выполнения.
5. Устройство по п. 4, в котором блок регулировки времени регулирует скорость перемещения приводного модуля на основе установленной продолжительности выполнения и длины спины пользователя.
6. Устройство по п. 1, в котором:
установочный блок содержит блок выбора силы, сконфигурированный для выбора силы массажа, и блок выбора увеличения/уменьшения силы, сконфигурированный для выбора увеличения/уменьшения выбранной силы массажа для точной регулировки силы массажа; и
управляющий блок содержит блок управления силой, сконфигурированный для управления приводным модулем так, чтобы приводной модуль работал с выбранной силой массажа, и блок регулировки силы, сконфигурированный для увеличения или уменьшения скорости перемещения приводного модуля согласно выбору увеличения/уменьшения для регулировки силы массажа.
7. Устройство по п. 6, в котором блок выбора увеличения/уменьшения силы выбирает силу массажа аналоговым способом.
8. Способ управления массажером, включающий: установку режима массажа,
сканирование тела пользователя и вычисление информации о форме тела, включающей по меньшей мере одно из веса пользователя и длины спины пользователя, и
управление скоростью перемещения приводного модуля на основе вычисленной информации о форме тела и регулировке продолжительности выполнения схемы массажа,
при этом регулировка продолжительности выполнения упомянутой схемы массажа включает такую регулировку, чтобы упомянутая схема массажа завершалась за одно и то же время независимо от информации о форме тела.
9. Способ по п. 8, в котором регулировка продолжительности выполнения схемы массажа включает управление транспортным двигателем, сконфигурированным для горизонтального перемещения приводного модуля, для регулировки скорости перемещения приводного модуля.
10. Способ по п. 8, в котором регулировка продолжительности выполнения схемы массажа включает вычисление скорости перемещения приводного модуля на основе заранее заданной стандартной продолжительности выполнения и длины спины пользователя для схемы массажа для регулировки скорости перемещения приводного модуля.
11. Способ по п. 8, в котором указанная установка включает установку продолжительности выполнения схемы массажа и
регулировка включает регулировку скорости перемещения приводного модуля так, чтобы схема массажа завершалась согласно установленной продолжительности выполнения.
12. Способ по п. 11, в котором указанная регулировка продолжительности выполнения схемы массажа включает регулировку скорости перемещения приводного модуля на основе установленной продолжительности выполнения и длины спины пользователя.
| ПЕРЕМЕЩАЮЩИЙСЯ МАССАЖЕР И СПОСОБ ОСУЩЕСТВЛЕНИЯ МАССАЖА С ЕГО ПОМОЩЬЮ | 2013 |
|
RU2551939C1 |
| JPH 06125964 A, 10.05.1994 | |||
| УСТРОЙСТВО ДЛЯ ВАКУУМНОГО МАССАЖА | 2011 |
|
RU2454215C1 |
| МАССАЖЕР | 2009 |
|
RU2392917C1 |
| ПЕРЕНОСНОЙ ВАКУУМНЫЙ МАССАЖЕР | 2001 |
|
RU2187294C1 |
| Контактор низкого напряжения | 1958 |
|
SU126936A1 |
| Способ выделения алкалоида паравалларина | 1960 |
|
SU149358A1 |
| CN 204319195 U, 13.05.2015 | |||
| JP 2011130811 A, 07.07.2011. | |||

