ОБЛАСТЬ ТЕХНИКИ
Представленные здесь варианты осуществления относятся к сетям связи и, в частности, к способам, устройствам, компьютерным программам и компьютерному программному продукту для предоставления информации о местоположении в сети связи.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В сетях связи может возникнуть проблема, состоящая в получении хорошей производительности и пропускной способности для заданного протокола связи, его параметров и физической среды, в которой развернута сеть связи.
Например, одним из параметров при обеспечении хорошей производительности и пропускной способности для заданного протокола связи в сети связи является формирование луча. Кроме того, для устройств в сети связи может быть выгодным иметь низкое энергопотребление.
Для того чтобы снизить энергопотребление в сети связи и полностью обеспечить возможность использования формирования луча с высоким усилением или других методов с использованием нескольких антенн, предполагалось, что уровень управления/широковещательной передачи может быть отделен от плоскости данных.
В общих чертах, уровень управления, также обозначаемый как плоскость управления системы (SCP), отвечает за функции, связанные с произвольным доступом и поисковым вызовом в сети связи. Чтобы снизить энергопотребление в сети, широковещательные сигналы могут передаваться сетевыми узлами, такими как узлы сети радиодоступа, в сети связи более редко, чем унаследованные опорные сигналы в сотовых системах. Однако представляется, что такая нечастая передача широковещательных сигналов может не быть специфической для сетевого узла, как в унаследованной сети связи. Беспроводное устройство в режиме ожидания не сможет тогда идентифицировать отдельные сетевые узлы до присоединения к сети.
То, что беспроводное устройство не сможет идентифицировать отдельные сетевые узлы до присоединения к сети, могло бы означать, что беспроводное устройство не сможет выполнять позиционирование. В некоторых сценариях, развернутая сетевая инфраструктура, таким образом, является недостаточной для позиционирования. Например, сетевая инфраструктура может устанавливаться постепенно или развертываться только для поддержки потребностей осуществления связи, но не для удовлетворения потребностей в позиционировании. Одним примером является конструирование сетевых узлов, где окружающая среда органично изменяется с течением времени и где потребности в связи могут также со временем изменяться. Другим примером являются шахты, где инфраструктура шахты изменяется с течением времени, а необходимость позиционирования сильно локализована там, где в текущее время проводится работа. Еще одним примером является складское здание, где в некоторых местах здания могут иметься некоторые базовые потребности в позиционировании, и где одновременно могут возникать более жесткие потребности в позиционировании (людей и товаров) вблизи транспортных средств, работающих в здании.
В некоторых таких случаях, позиционирование может по-прежнему опираться на внешние сигналы и системы, такие как Глобальная система спутниковой навигации (GNSS), и сетевая инфраструктура может предоставлять только преимущества с точки зрения предоставления вспомогательных данных для облегчения извлечения сигналов. Однако доступность GNSS может быть ограничена в области рассмотрения, и позиционируемые устройства могут не иметь возможности извлечения сигналов GNSS.
Кроме того, в некоторых других случаях существует адекватное позиционирование, доступное из развернутой сетевой инфраструктуры в частях зоны обслуживания, но не во всей зоне.
Следовательно, по-прежнему существует потребность в улучшенных механизмах предоставления и получения информации о местоположении в сети связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей вариантов осуществления настоящего изобретения является создание эффективных механизмов для предоставления и получения информации о местоположении в сети связи.
Согласно первому аспекту, обеспечен способ предоставления информации о местоположении в сети связи. Этот способ выполняется первым устройством. Первое устройство поддерживает позиционирование других устройств в сети связи. Способ содержит получение конфигурации опорного сигнала позиционирования от узла радиосети в сети связи. Способ содержит получение информации о местоположении от локального объекта позиционирования. Способ содержит предоставление информации о местоположении по меньшей мере одному из узла радиосети и второго устройства в сети связи. Способ содержит передачу опорного сигнала позиционирования в соответствии с конфигурацией опорного сигнала позиционирования.
Предпочтительным образом, это обеспечивает эффективное предоставление информации о местоположении в сети связи.
Предпочтительным образом, это позволяет некоторым устройствам, таким как первое устройство, которые заполняют некоторую область, действовать как гибкие опорные точки и, тем самым, обеспечивать поддержку позиционирования другим устройствам, таким как второе устройство, в данной области. Путем обеспечения возможности сетевого управления, сеть связи может управлять доступностью позиционирования. Первые устройства могут информировать сетевой узел о своих функциональных возможностях, возможно, при их запуске, как только они выполнят само-позиционирование адекватным образом. Таким образом, можно поддерживать позиционирование в средах и в случаях использования, которые органично разрастаются и изменяются с течением времени.
Согласно второму аспекту, обеспечено устройство для предоставления информации о местоположении в сети связи. Устройство поддерживает позиционирование других устройств в сети связи. Устройство содержит схему обработки. Схема обработки сконфигурирована так, чтобы побуждать устройство выполнять набор операций. Набор операций побуждает устройство получать конфигурацию опорного сигнала позиционирования от узла радиосети в сети связи. Набор операций побуждает устройство получать информацию о местоположении от локального объекта позиционирования. Набор операций побуждает устройство предоставлять информацию о местоположении по меньшей мере одному из узла радиосети и второго устройства в сети связи. Набор операций побуждает устройство передавать опорный сигнал позиционирования в соответствии с конфигурацией опорного сигнала позиционирования.
Согласно третьему аспекту, обеспечена компьютерная программа для предоставления информации о местоположении в сети связи, причем компьютерная программа содержит код компьютерной программы, который, при исполнении в схеме обработки устройства, побуждает устройство выполнять способ согласно первому аспекту.
Согласно четвертому аспекту, обеспечен способ для второго устройства, чтобы получать информацию позиционирования в сети связи. Этот способ выполняется вторым устройством. Способ содержит получение информации поддержки позиционирования путем приема информации о местоположении первого устройства, причем первое устройство поддерживает позиционирование других устройств в сети связи, при этом информация о местоположении служит в качестве упомянутой информации поддержки позиционирования для второго устройства. Способ содержит прием опорного сигнала позиционирования от первого устройства, причем опорный сигнал позиционирования принимается в соответствии с конфигурацией опорного сигнала позиционирования. Способ содержит выполнение по меньшей мере одного из первого набора операций и второго набора операций. Первый набор операций содержит оценивание характеристических свойств из принятого опорного сигнала позиционирования. Первый набор операций содержит сообщение оцененных характеристических свойств и их ассоциации с первым устройством к сетевому узлу в сети связи. Второй набор операций содержит определение текущей позиции второго устройства в соответствии с принятой информацией поддержки позиционирования.
Предпочтительным образом, это обеспечивает эффективное получение информации о местоположении в сети связи.
Согласно пятому аспекту, обеспечено устройство для получения информации позиционирования в сети связи. Устройство содержит схему обработки. Схема обработки сконфигурирована, чтобы побуждать устройство выполнять набор операций. Набор операций побуждает устройство получать информацию поддержки позиционирования путем приема информации о местоположении другого устройства, причем другое устройство поддерживает позиционирование других устройств в сети связи, при этом информация о местоположении служит в качестве упомянутой информации поддержки позиционирования для устройства. Набор операций побуждает устройство принимать опорный сигнал позиционирования от этого другого устройства, причем опорный сигнал позиционирования принимается в соответствии с конфигурацией опорного сигнала позиционирования. Набор операций побуждает устройство выполнять по меньшей мере один из первого набора операций и второго набора операций. Первый набор операций содержит оценивание характеристических свойств из принятого опорного сигнала позиционирования. Первый набор операций содержит сообщение оцененных характеристических свойств и их ассоциацию с первым устройством к сетевому узлу в сети связи. Второй набор операций содержит определение текущей позиции второго устройства в соответствии с принятой информацией поддержки позиционирования.
Согласно шестому аспекту, обеспечена компьютерная программа для получения информации позиционирования в сети связи, причем компьютерная программа содержит код компьютерной программы, который, при исполнении в схеме обработки устройства, побуждает устройство выполнять способ согласно четвертому аспекту.
Согласно седьмому аспекту, обеспечен компьютерный программный продукт, содержащий компьютерную программу в соответствии с по меньшей мере одним из третьего аспекта и шестого аспекта, и считываемое компьютером средство, на котором хранится компьютерная программа.
Следует отметить, что любой признак первого, второго, третьего, четвертого, пятого, шестого и седьмого аспектов может быть применен к любому другому аспекту, если это уместно. Аналогично, любое преимущество первого аспекта может в равной степени относиться ко второму, третьему, четвертому, пятому, шестому и/или седьмому аспекту, соответственно, и наоборот. Другие цели, признаки и преимущества прилагаемых вариантов осуществления будут очевидны из следующего подробного раскрытия, из приложенных зависимых пунктов формулы изобретения, а также из чертежей.
Как правило, все термины, используемые в формуле изобретения, должны интерпретироваться в соответствии с их обычным значением в технической области, если только здесь явно не определено иным образом. Все ссылки на ʺэлемент, устройство, компонент, средство, этап и т.д.ʺ должны интерпретироваться открыто, как относящиеся по меньшей мере к одному экземпляру элемента, устройства, компонента, средства, этапа и т.д., если явно не указано иное. Этапы любого способа, раскрытого здесь, не обязательно должны выполняться в точном порядке, как раскрыто, если только не указано явным образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Концепция изобретения описана ниже, в качестве примера, со ссылкой на приложенные чертежи, на которых представлено следующее:
Фиг. 1 - схематичное представление, иллюстрирующее сеть связи в соответствии с вариантами осуществления;
Фиг. 2а - схематичное представление, показывающее функциональные блоки первого устройства в соответствии с вариантом осуществления;
Фиг. 2b - схематичное представление, показывающее функциональные модули первого устройства в соответствии с вариантом осуществления;
Фиг. 3а - схематичное представление, показывающее функциональные блоки второго устройства в соответствии с вариантом осуществления;
Фиг. 3b - схематичное представление, показывающее функциональные модули второго устройства в соответствии с вариантом осуществления;
Фиг. 4 показывает один пример компьютерного программного продукта, содержащего считываемое компьютером средство в соответствии с вариантом осуществления;
Фиг. 5, 6, 7, 8, 9 и 10 - блок-схемы последовательностей операций способов в соответствии с вариантами осуществления; и
Фиг. 11 и 12 - диаграммы сигнализации в соответствии с вариантами осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Далее концепция изобретения будет описана более подробно со ссылкой на прилагаемые чертежи, на которых показаны некоторые варианты осуществления концепции изобретения. Однако эта концепция изобретения может быть воплощена во многих различных формах и не должна истолковываться как ограниченная вариантами осуществления, изложенными в настоящем документе; скорее, эти варианты осуществления приведены в качестве примера, чтобы это раскрытие было подробным и полным и полностью передавало объем концепции изобретения для специалистов в данной области техники. Одинаковые числа относятся к одинаковым элементам в описании. Любой этап или признак, проиллюстрированный пунктирными линиями, следует рассматривать как опциональный.
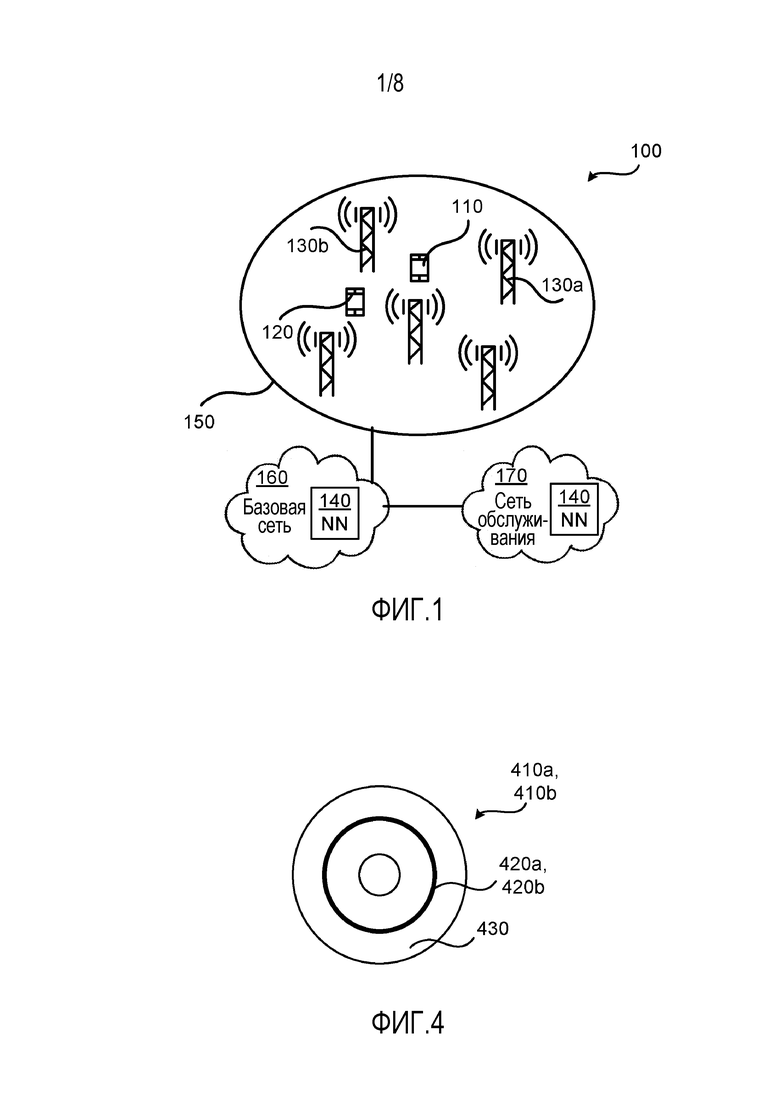
На фиг. 1 показана схема, иллюстрирующая сеть 100 связи, где могут быть применены варианты осуществления, представленные в настоящем документе. Сеть 100 связи содержит узлы 130a, 130b радиосети. Каждый узел 130a, 130b радиосети предоставляет одну или несколько сот 150 для устройства 110, 120, чтобы располагаться в них. Узлы 130a, 130b радиосети функционально соединены с базовой сетью 160, которая, в свою очередь, функционально соединена с сетью 170 обслуживания. Устройство 110, 120, расположенное в соте 150 одного из узлов 130a, 130b радиосети, может, таким образом, иметь доступ к контенту и услугам, предоставляемым сетью 170 обслуживания.
Сеть 100 связи может содержать сетевые узлы (NN) 140. Сетевой узел 140 может быть предусмотрен в базовой сети 160 или в сети 170 обслуживания. В общих чертах, сетевой узел 140 может быть сконфигурирован, чтобы контролировать устройства 110, 120 в некоторой области, например, для отслеживания местоположения устройств 110, 120 в этой области или для отслеживания устройств 110, 120 по отношению к другим устройствам 110, 120, чтобы избежать столкновений.
Узлы 130a, 130b радиосети могут быть обеспечены в виде любой комбинации узлов сети радиодоступа, таких как базовые радиостанции, базовые приемопередающие станции, узлы B и развитые узлы B. Устройства 110, 120 могут быть обеспечены как портативное беспроводное устройство, такое как мобильная станция, мобильный телефон, гарнитура, телефон беспроводного локального шлейфа, пользовательское оборудование (UE), смартфон, портативный компьютер, планшетный компьютер или беспроводное сенсорное устройство.
Следующие определения будут полезны для описания вариантов осуществления, раскрытых в настоящем документе.
Термин ʺпозиционированиеʺ может определяться как определение местонахождения устройства. Позиционирование устройства может оцениваться на основе сигналов от инфраструктурных узлов и устройств.
Термин ʺместоположениеʺ может быть определен как относящийся к местонахождению элемента инфраструктуры. Ввиду раскрытых здесь вариантов осуществления, первое устройство 110 является частью инфраструктуры позиционирования, и поэтому имеет смысл рассматривать местоположение первого устройства 110. Местоположение первого устройства 110 может быть определено посредством позиционирования.
Термин ʺопорный сигнал позиционированияʺ может быть определен как любой тип сигнала, передаваемого инфраструктурными узлами и устройствами для поддержки позиционирования. Кроме того, опорный сигнал позиционирования может содержать идентификатор первого устройства 110. Опорный сигнал позиционирования может быть определен, как предусмотрено в Долгосрочном развитии (LTE), выпуск 9.
Термин ʺинформация о местоположенииʺ может быть определен как местоположение первого устройства 110, как указано в сообщении, передаваемом либо к сетевому узлу, либо к другому устройству, такому как второе устройство 120. Таким образом, информация о местоположении может определять текущее местоположение первого устройства 100. Идентификатор первого устройства 110 также может рассматриваться как пример информации о местоположении.
Термин ʺинформация поддержки позиционированияʺ может быть определен как информация для устройства об одном или нескольких инфраструктурных узлах и устройствах, содержащая конфигурацию опорного сигнала позиционирования и, возможно, информацию о местоположении узла/устройства.
Варианты осуществления, раскрытые здесь, относятся к предоставлению информации позиционирования в сети 100 связи. Для предоставления информации позиционирования в сети связи, предусмотрено устройство 110, обозначенное как первое устройство, способ, выполняемый первым устройством 110, компьютерная программа, содержащая код, например, в форме компьютерного программного продукта, который, при исполнении в схеме обработки первого устройства, побуждает первое устройство выполнять этот способ.
Другие варианты осуществления, раскрытые в настоящем документе, относятся к получению информации позиционирования в сети 100 связи. Для получения информации позиционирования в сети связи, предусмотрено устройство 120, обозначенное как второе устройство, способ, выполняемый вторым устройством 120, и компьютерная программа, содержащая код, например, в форме компьютерного программного продукта, который, при исполнении в схеме обработки второго устройства 120, побуждает второе устройство 120 выполнять этот способ.
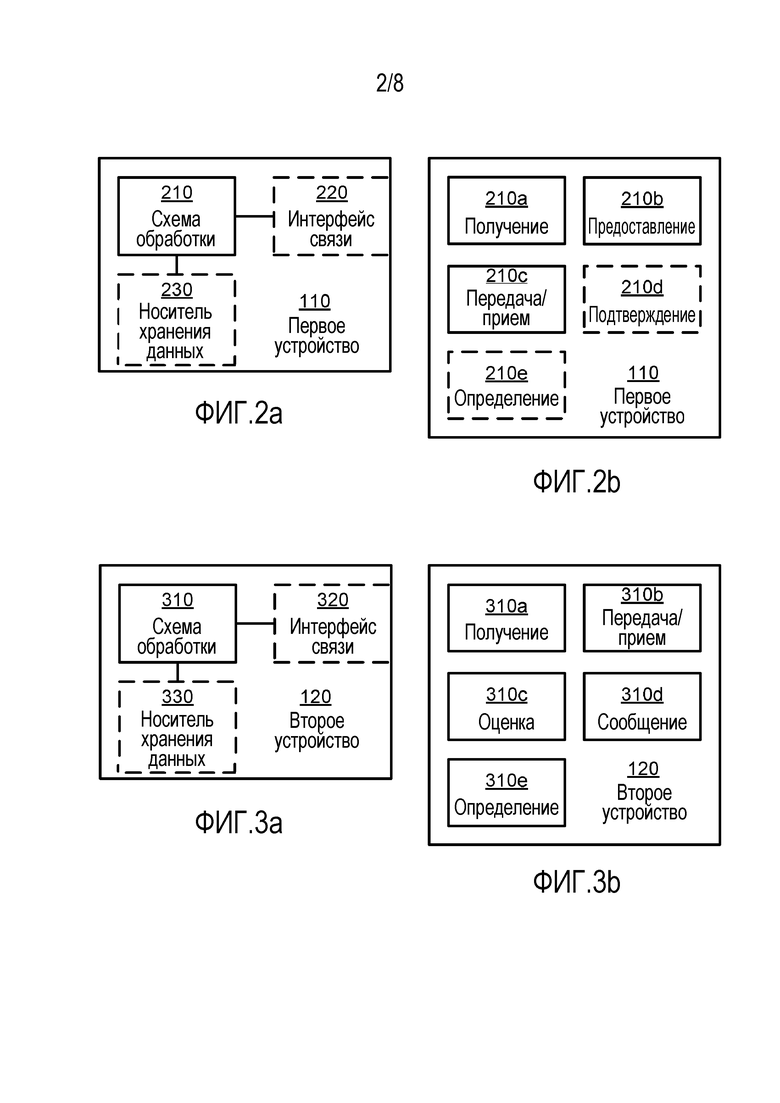
Фиг. 2а схематично иллюстрирует, в терминах ряда функциональных блоков, компоненты первого устройства 110 в соответствии с вариантом осуществления. Обеспечена схема 210 обработки, использующая любую комбинацию одного или нескольких из подходящего центрального процессора (CPU), мультипроцессора, микроконтроллера, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемых вентильных матриц (FPGA) и т.д., способных выполнять программные инструкции, сохраненные в компьютерном программном продукте 410a (как на фиг. 4), например, в форме носителя 230 хранения данных.
В частности, схема 210 обработки сконфигурирована, чтобы побуждать первое устройство 110 выполнять набор операций или этапов S102-S124. Эти операции или этапы S102-S124 будут описаны ниже. Например, носитель 230 хранения данных может хранить набор операций, а схема 210 обработки может быть сконфигурирована, чтобы извлекать набор операций из носителя 230 хранения данных, чтобы побуждать первое устройство 110 выполнять набор операций. Набор операций может быть представлен как набор исполняемых инструкций. При этом схема 210 обработки выполнена таким образом, чтобы выполнять способы, как раскрыто в настоящем документе. Носитель 230 хранения данных может также содержать постоянное устройство хранения, которое, например, может быть любым одним или комбинацией магнитной памяти, оптической памяти, твердотельной памяти или даже удаленно установленной памяти.
Первое устройство 110 может дополнительно содержать интерфейс 220 связи для связи с другими устройствами и узлами 120, 130a, 130b, 140 в сети 100 связи. Таким образом, интерфейс 220 связи может содержать один или несколько передатчиков и приемников, содержащих аналоговые и цифровые компоненты, и подходящее количество антенн для беспроводной связи. Схема 210 обработки управляет общей работой первого устройства 110, например, путем отправки данных и управляющих сигналов на интерфейс 220 связи и носитель 230 хранения данных путем приема данных и сообщений из интерфейса 220 связи и путем извлечения данных и инструкций из носителя 230 хранения данных. Другие компоненты, а также связанные функциональные возможности первого устройства 110 опущены, чтобы не затруднять понимание концепций, представленных в настоящем изобретении.
Фиг. 2b схематично иллюстрирует, в терминах ряда функциональных модулей, компоненты первого устройства 110 в соответствии с вариантом осуществления. Первое устройство 110 согласно фиг. 2b содержит ряд функциональных модулей: модуль 210a получения, сконфигурированный, чтобы выполнять описанные ниже этапы S102, S104, S104a, S114; модуль 210b предоставления, сконфигурированный, чтобы выполнять описанные ниже этапы S106, S112, S116, S120, S124; и модуль 210c передачи и/или приема, сконфигурированный, чтобы выполнять описанные ниже этапы S108, S110, S122. Первое устройство 110, показанное на фиг. 2b, может дополнительно содержать ряд опциональных функциональных модулей, таких как любой из модуля 210d подтверждения, сконфигурированного, чтобы выполнять описанный ниже этап S118, и модуля 210е определения, сконфигурированного, чтобы выполнять описанный ниже этап S104b. Функциональные возможности каждого функционального модуля 210a-210e будут дополнительно раскрыты ниже в контексте, в котором могут использоваться функциональные модули 210a-210e. В общих чертах, каждый функциональный модуль 210a-210e может быть реализован в аппаратных средствах или в программном обеспечении. Предпочтительно, один или несколько или все функциональные модули 210a-210e могут быть реализованы схемой 210 обработки, возможно, во взаимодействии с функциональными блоками 220 и/или 230. Таким образом, схема 210 обработки может быть выполнена так, чтобы извлекать инструкции из носителя 230 хранения данных, как предусмотрено функциональным модулем 210а-210е, и исполнять эти инструкции, тем самым выполняя любые этапы, как будет раскрыто ниже.
Фиг. 3а схематично иллюстрирует, в терминах ряда функциональных блоков, компоненты второго устройства 120 в соответствии с вариантом осуществления. Обеспечена схема 310 обработки, использующая любую комбинацию одного или нескольких из подходящего центрального процессора (CPU), мультипроцессора, микроконтроллера, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемых вентильных матриц (FPGA) и т.д., способных выполнять программные инструкции, сохраненные в компьютерном программном продукте 410b (как на фиг. 4), например, в форме носителя 330 хранения данных.
В частности, схема 310 обработки сконфигурирована, чтобы побуждать второе устройство 120 выполнять набор операций или этапов S202-S216. Эти операции или этапы S202-S216 будут описаны ниже. Например, носитель 330 хранения данных может хранить набор операций, а схема 310 обработки может быть сконфигурирована, чтобы извлекать набор операций из носителя 330 хранения данных, чтобы побуждать второе устройство 120 выполнять набор операций. Набор операций может быть представлен как набор исполняемых инструкций. Таким образом, схема 310 обработки выполнена таким образом, чтобы выполнять способы, как раскрыто в настоящем документе. Носитель 330 хранения данных может также содержать постоянное устройство хранения, которое, например, может быть любым одним или комбинацией магнитной памяти, оптической памяти, твердотельной памяти или даже удаленно установленной памяти.
Второе устройство 120 может дополнительно содержать интерфейс 320 связи для связи с другими устройствами и узлами 110, 130a, 130b, 140 в сети 100 связи. Таким образом, интерфейс 320 связи может содержать один или несколько передатчиков и приемников, содержащих аналоговые и цифровые компоненты, и подходящее количество антенн для беспроводной связи. Схема 310 обработки управляет общей работой второго устройства 120, например, путем отправки данных и управляющих сигналов на интерфейс 320 связи и носитель 330 хранения данных путем приема данных и сообщений из интерфейса 320 связи и путем извлечения данных и инструкций из носителя 330 хранения данных. Другие компоненты, а также связанные функциональные возможности второго устройства 120 опущены, чтобы не затруднять понимание концепций, представленных в настоящем изобретении.
Фиг. 3b схематично иллюстрирует, в терминах ряда функциональных модулей, компоненты второго устройства 120 в соответствии с вариантом осуществления. Второе устройство 120 согласно фиг. 3b содержит ряд функциональных модулей: модуль 310a получения, сконфигурированный, чтобы выполнять описанные ниже этапы S202, S204, модуль 310b передачи и/или приема, сконфигурированный, чтобы выполнять описанные ниже этапы S202a, S206, S214, S216, модуль 310c оценки, сконфигурированный, чтобы выполнять описанный ниже этап S208, модуль 310d сообщения, сконфигурированный, чтобы выполнять описанный ниже этап S210, и модуль 310e определения, сконфигурированный, чтобы выполнять описанный ниже этап S212. Функциональность каждого функционального модуля 310a-310e в контексте, в котором могут использоваться функциональные модули 310a-310e. В общих чертах, каждый функциональный модуль 310a-310e может быть реализован в аппаратных средствах или в программном обеспечении. Предпочтительно один или несколько или все функциональные модули 310a-310e могут быть реализованы схемой 310 обработки, возможно, во взаимодействии с функциональными блоками 320 и/или 330. Таким образом, схема 310 обработки может быть выполнена так, чтобы извлекать инструкции из носителя 230 хранения данных, как предусмотрено функциональным модулем 310а-310е, и исполнять эти инструкции, тем самым выполняя любые этапы, как будет раскрыто ниже.
На фиг. 4 показан один пример компьютерного программного продукта 410a, 410b, содержащего считываемое компьютером средство 430. На этом считываемом компьютером средстве 430 может быть сохранена компьютерная программа 420a, причем компьютерная программа 420a может побуждать схему 210 обработки и функционально связанные с ней объекты и устройства, такие как интерфейс 220 связи и носитель 230 хранения данных, выполнять способы в соответствии с вариантами осуществления, описанными в настоящем документе. Компьютерная программа 420a и/или компьютерный программный продукт 410a могут, таким образом, обеспечивать средство для выполнения любых этапов первого устройства 110, раскрытого здесь. На этом считываемом компьютером средстве 430 может быть сохранена компьютерная программа 420b, причем компьютерная программа 420b может побуждать схему 310 обработки и функционально связанные с ней объекты и устройства, такие как интерфейс 320 связи и носитель 330 хранения данных, выполнять способы в соответствии с вариантами осуществления, описанными здесь. Таким образом, компьютерная программа 420b и/или компьютерный программный продукт 410b могут обеспечивать средство для выполнения любых этапов второго устройства 120, как раскрыто в настоящем документе.
В примере, показанном на фиг. 4, компьютерный программный продукт 410a, 410b проиллюстрирован как оптический диск, такой как CD (компакт-диск) или DVD (цифровой универсальный диск) или Blu-Ray диск. Компьютерный программный продукт 410a, 410b также может быть воплощен как память, например, память с произвольным доступом (RAM), постоянная память (ROM), стираемая программируемая постоянная память (EPROM) или электрически стираемая программируемая постоянная память (EEPROM) и, более конкретно, как энергонезависимый носитель хранения данных устройства во внешней памяти, такой как память USB (универсальная последовательная шина) или флэш-память, такая как компактная флэш-память. Таким образом, хотя компьютерная программа 420a, 420b здесь схематично показана как дорожка на изображенном оптическом диске, компьютерная программа 420a, 420b может быть сохранена любым способом, который подходит для компьютерного программного продукта 410a, 410b.
Фиг. 5 и 6 являются блок-схемами последовательностей операций, иллюстрирующими варианты осуществления способов предоставления информации о местоположении в сети 100 связи, как выполняется первым устройством 110. Фиг. 7 и 8 являются блок-схемами последовательностей операций, иллюстрирующими варианты осуществления способов получения информации позиционирования в сети 100 связи, как выполняется вторым устройством 120. Способы предпочтительным образом предоставляются в виде компьютерных программ 42a, 42b.
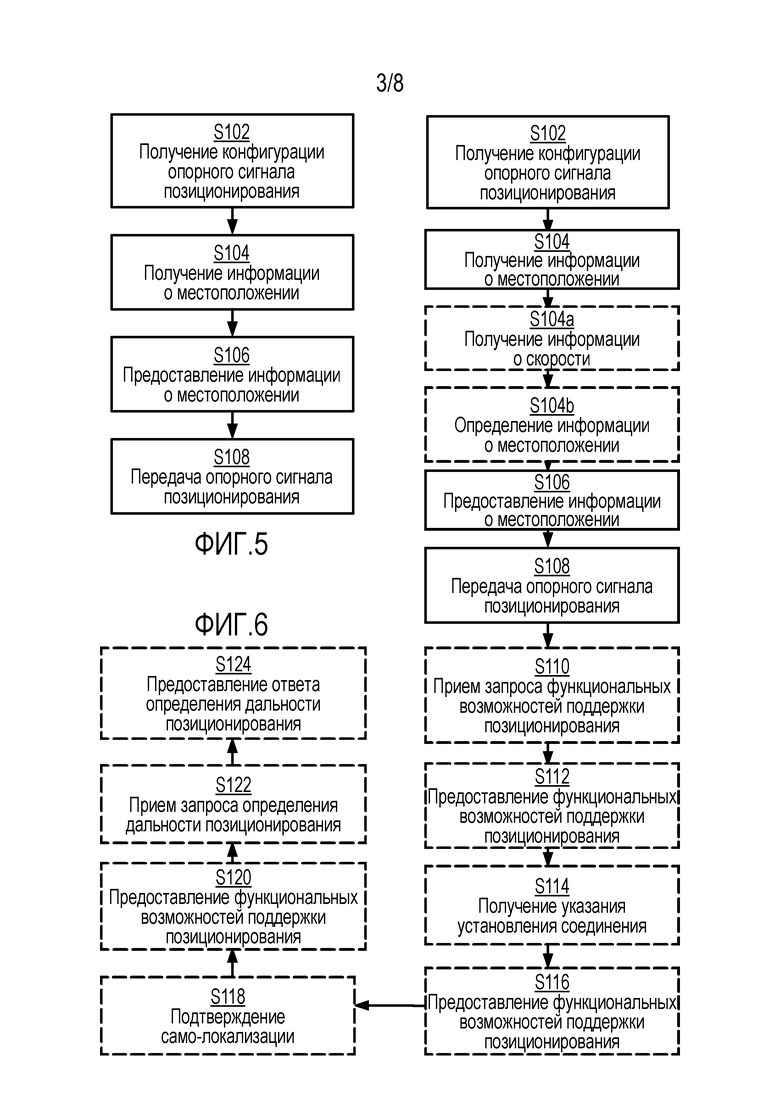
Далее дается ссылка на фиг. 5, иллюстрирующую способ предоставления информации о местоположении в сети 100 связи, как выполняется первым устройством 110 согласно варианту осуществления. Первое устройство 110 поддерживает позиционирование других устройств 120, 130b, 140 в сети 100 связи.
В общем, первое устройство 100 в сети 100 связи ассоциировано с функциональной возможностью предоставления опорных сигналов позиционирования. Это обеспечивает возможность того, что второе устройство 120, сконфигурированное для контроля и измерения извлекаемых опорных сигналов позиционирования от первого устройства 110, может либо определять позицию, используя информацию поддержки позиционирования из сети 100 связи, либо сообщать измерения, ассоциированные с опорными сигналами позиционирования, к сетевому узлу, который может представлять собой узел 130a, 130b радиосети или сетевой узел 140 вне части сети радиодоступа сети 100 связи.
Первое устройство 110 сконфигурировано, чтобы на этапе S102 получать конфигурацию опорного сигнала позиционирования от узла 130a радиосети в сети 100 связи. Примеры конфигурации опорного сигнала позиционирования и того, каким образом первое устройство 110 может осуществлять связь с узлом 130a радиосети, будут представлены ниже.
Первое устройство 110 сконфигурировано, чтобы на этапе S104 получать информацию о местоположении от локального объекта позиционирования. Примеры информации о местоположении и локальных объектов позиционирования будут представлены ниже.
Первое устройство 110 сконфигурировано, чтобы на этапе S106 предоставлять информацию о местоположении узлу 130b радиосети и/или второму устройству 120 в сети 100 связи. Примеры того, каким образом первое устройство 110 и/или второе устройство 120 могут осуществлять связь с узлом 130b радиосети и/или с вторым устройством 120, будут представлены ниже.
Первое устройство 110 сконфигурировано, чтобы на этапе S108 передавать опорный сигнал позиционирования в соответствии с конфигурацией опорного сигнала позиционирования. Примеры опорного сигнала позиционирования будут представлены ниже.
Раскрытый таким образом механизм для предоставления информации о местоположении в сети 100 связи с выгодой для себя использует устройства, такие как первое устройство 110, со специальными функциональными возможностями, такими как способность само-локализации и способность передавать опорные сигналы позиционирования, тем самым содействуя позиционированию других устройств, таких как второе устройство 120, в сети.
Далее будут раскрыты варианты осуществления, касающиеся дополнительных подробностей предоставления информации о местоположении в сети 100 связи.
Первое устройство 110 может быть способным определять свое местоположение либо в абсолютных единицах, либо относительно наблюдаемых признаков. Функциональная возможность поддержки позиционирования первого устройства 110 касается его способности получать само-локализацию; поскольку первое устройство 110 считается частью инфраструктуры позиционирования, его местонахождение упоминается как его местоположение, см. выше.
Первое устройство 110 может быть сконфигурировано с интерфейсом 220 связи и схемой 210 обработки, способной определять свою информацию о местоположении путем извлечения опорных сигналов позиционирования от узлов 130a, 130b радиосети, как на этапе S102, возможно, при поддержке с помощью информации поддержки от узла 140 сети.
Первое устройство 110 может быть сконфигурировано с интерфейсом 220 связи и схемой 210 обработки, способной определять свою информацию о местоположении на основе оценок ранжирования (определения дальности) путем обмена пакетами с узлами 130a, 130b радиосети, возможно, при поддержке с помощью информации поддержки от узла 140 сети.
Первое устройство 110 может быть сконфигурировано с такими датчиками, как визуальные и инфракрасные камеры, радары, ультразвуковые датчики и другие датчики и системы, нацеленные на определение информации о местоположении первого устройства 110, опционально по отношению к идентифицированным объектам и признакам или по отношению к информации карты, возможно, при поддержке с помощью информации поддержки от узла 140 сети.
Кроме того, могут быть различные примеры локальных объектов позиционирования, от которых первое устройство 110 может получать информацию о местоположении, как на этапе S104. Например, локальный объект позиционирования может представлять собой Глобальную систему спутниковой навигации (GNSS), Глобальную систему позиционирования (GPS), Глобальную систему спутниковой навигации (GLONAS), систему спутниковой навигации BeiDou (BDS) или объект, поддерживаемый Galileo. Для получения информации о местоположении от локальных объектов позиционирования, интерфейс 220 связи и схема 210 обработки должны, таким образом, быть сконфигурированы для приема и обработки информации, передаваемой таким локальным объектом позиционирования. Например, если локальным объектом позиционирования является Глобальная система позиционирования, первое устройство 110 может быть оснащено навигационным устройством GPS для приема информации о местоположении от спутника GPS и т.д. То есть первое устройство 110 может быть сконфигурировано с интерфейсом 220 связи и схемой 210 обработки, способной определять свою информацию о местоположении, используя информацию GPS, возможно, при поддержке сетевого узла 140. Дополнительная информация о том, как должно быть сконфигурировано первое устройство 110, чтобы осуществлять связь с такими локальными объектами позиционирования, известна в данной области техники, и поэтому подробное описание этого опущено.
Как отмечено выше, первое устройство 110 сконфигурировано, чтобы принимать конфигурацию опорного сигнала позиционирования от узла 130а радиосети в сети 100 связи. Возможны различные виды конфигурации опорного сигнала позиционирования. Ниже будут описаны различные варианты осуществления, относящиеся к ним. Например, конфигурация опорного сигнала позиционирования может быть подобна опорным сигналам позиционирования, определенным для LTE, разделенным на последовательность и отображение ресурсов в 3GPP TS 36.211. Это будет описано ниже.
В общих чертах, конфигурация опорного сигнала позиционирования (PRS) может содержать одну или более из конфигурации последовательности PRS, указывающей, какую последовательность генерировать для реализации сигнала позиционирования, конфигурации шаблона ресурсов PRS, описывающей, как отображать последовательность PRS на элементы ресурсов в пределах блоков ресурсов передаваемого сигнала, конфигурации блока ресурсов времени/частоты PRS, определяющей, какие блоки ресурсов должны использоваться для передачи PRS, конфигурации луча PRS, характеризующей конфигурацию антенных весов первого устройства 110 для передачи опорного сигнала позиционирования, конфигурации общей доступности и ограниченной доступности PRS, конфигурации приема запроса и передачи ответа ранжирования (определения дальности) позиционирования, чтобы позволить другим устройствам, таким как второе устройство 120, обмениваться сообщениями с первым устройством 110 для целей определения дальности.
Таким образом, конфигурация опорного сигнала позиционирования может определять конфигурацию последовательности, конфигурацию шаблона ресурсов, конфигурацию блока ресурсов времени/частоты, конфигурацию луча для определения того, как первое устройство должно передавать опорный сигнал позиционирования, или любую их комбинацию.
Различные устройства 110, 120 могут иметь различные возможности в отношении поддерживаемых конфигураций PRS. Поэтому, опционально, первое устройство 110 и/или второе устройство 120 могут указывать свои функциональные возможности относительно конфигураций PRS как часть сигнализации с сетевым узлом 130a, 130b, 140.
Далее дается ссылка на фиг. 6, иллюстрирующую способы предоставления информации о местоположении в сети 100 связи, как выполняется первым устройством 110 в соответствии с другими вариантами осуществления.
В дополнение к получению информации о местоположении от локального объекта позиционирования, как на этапе S104, первое устройство 110a может использовать вспомогательную информацию для определения информации о местоположении. Например, первое устройство 110a может использовать информацию о скорости, такую как величина и направление скорости, или скорость, разделенную на компоненты координат, доступные из компонентов, ассоциированных с первым устройством 110. Информация о скорости включает в себя указания, находится ли первое устройство 110 в движении или в стационарном состоянии. Следовательно, согласно варианту осуществления, первое устройство 110 сконфигурировано, чтобы на этапе S104a получать информацию о скорости первого устройства 110. В свою очередь, информация о скорости может быть основана на последовательности измерений, полученных от локального объекта позиционирования. Первое устройство 110 может тогда быть сконфигурировано так, чтобы на этапе S104b определять информацию о местоположении на основе информации о скорости.
Первое устройство 110 может быть сконфигурировано, чтобы сигнализировать о возможностях поддержки позиционирования к узлу 130a радиосети или другому сетевому узлу 140. Далее будут описаны различные варианты осуществления, относящиеся к этому.
Передача опорного сигнала позиционирования на этапе S108 может сопровождаться поддержкой для приема сообщений запроса определения дальности позиционирования и передачи сообщений ответа определения дальности позиционирования. Таким образом, один вариант осуществления основан на том, что первое устройство 110 сигнализирует о функциональных возможностях поддержки позиционирования к узлу 130a радиосети по требованию. В соответствии с этим вариантом осуществления, первое устройство 110 сконфигурировано, чтобы на этапе S110 принимать от сетевого узла 140 запрос о функциональных возможностях поддержки позиционирования первого устройства 110. Первое устройство 110 тогда сконфигурировано, чтобы в ответ на это на этапе S112 предоставлять функциональные возможности поддержки позиционирования к сетевому узлу 140.
Один вариант осуществления основан на том, что первое устройство 110 сигнализирует о функциональных возможностях поддержки позиционирования к узлу 130a радиосети при установлении соединения. В соответствии с этим вариантом осуществления, первое устройство 110 сконфигурировано так, чтобы на этапе S114 получить указание установления соединения к узлу 130a радиосети. То, каким образом устанавливается соединение между первым устройством 110 и узлом 130a радиосети, известно в данной области техники, поэтому подробное описание этого опущено. Первое устройство 110 тогда сконфигурировано, чтобы в ответ на это на этапе S116 предоставлять функциональные возможности поддержки позиционирования первого устройства 110 к узлу 130a радиосети.
Первое устройство 110 может опционально предоставлять такую информацию о функциональных возможностях сетевому узлу 140. Более подробно, когда первое устройство 110 получило обновленную или новую информацию о местоположении, оно может отправить информацию о местоположении к сетевому узлу, например, как часть информации о функциональных возможностях поддержки позиционирования, отправляемой к сетевому узлу 140. Таким образом, один вариант осуществления основан на том, что первое устройство 110 сигнализирует о функциональных возможностях поддержки позиционирования к сетевому узлу 140, после того как устройство 110 адекватным образом само-локализовано. В соответствии с этим вариантом осуществления, первое устройство 110 сконфигурировано, чтобы на этапе S118 подтвердить, что первое устройство само-локализовано. Первое устройство 110 тогда сконфигурировано, чтобы в ответ на это на этапе S120 предоставлять функциональные возможности поддержки позиционирования первого устройства 110 к сетевому узлу 140.
Как будет описано ниже, второе устройство 120 может передавать запрос определения дальности позиционирования к первому устройству 110. Следовательно, согласно варианту осуществления, первое устройство 110 сконфигурировано так, чтобы на этапе S122 принимать запрос определения дальности позиционирования от другого устройства в сети 100 связи. Первое устройство 110 может тогда быть сконфигурировано, чтобы в ответ на это на этапе S124 предоставлять ответ определения дальности позиционирования к другому устройству. Это другое устройство может быть вторым устройством 120. Однако в общем случае оно может быть любым устройством или узлом в сети 100 связи с функциональной возможностью передачи такого запроса определения дальности позиционирования.
Могут иметься различные способы для первого устройства 110, чтобы осуществлять связь с сетевым узлом 140, узлами 130a, 130b радиосети и вторым устройством 120, соответственно. Ниже будут описаны различные примеры, относящиеся к этому.
Например, все сообщения между первым устройством 110 и сетевым узлом 140 могут быть сообщениями плоскости управления или сообщениями протокола позиционирования пользовательской плоскости. Примерами таких протоколов являются LPP (протокол позиционирования LTE) и SUPL (безопасное определение местоположения пользовательской плоскости).
Например, все сообщения между первым устройством 110 и узлами 130а, 130b радиосети, могут быть сообщениями протокола управления радиоресурсами (RRC) или сообщениями протокола доступа к среде (MAC).
Например, все сообщения между первым устройством 110 и вторым устройством 120 могут быть сообщениями протокола прямого соединения. Дополнительно или альтернативно, как только первое устройство 110 получает обновленную или новую информацию о местоположении, оно может отправлять информацию о местоположении к второму устройству 120 посредством обычной широковещательной передачи или по требованию (например, используя сообщения протокола прямого соединения).
Например, опорный сигнал позиционирования может на этапе S108 передаваться посредством ресурса нисходящей линии связи в дуплексной конфигурации с временным разделением, посредством ресурса восходящей линии связи в дуплексной конфигурации с временным разделением, посредством ресурса восходящей линии связи в дуплексной конфигурации с частотным разделением (одним примером является ресурс прямого соединения, сконфигурированный для связи между устройствами) или посредством ресурса прямого соединения, сконфигурированного для целей поддержки позиционирования.
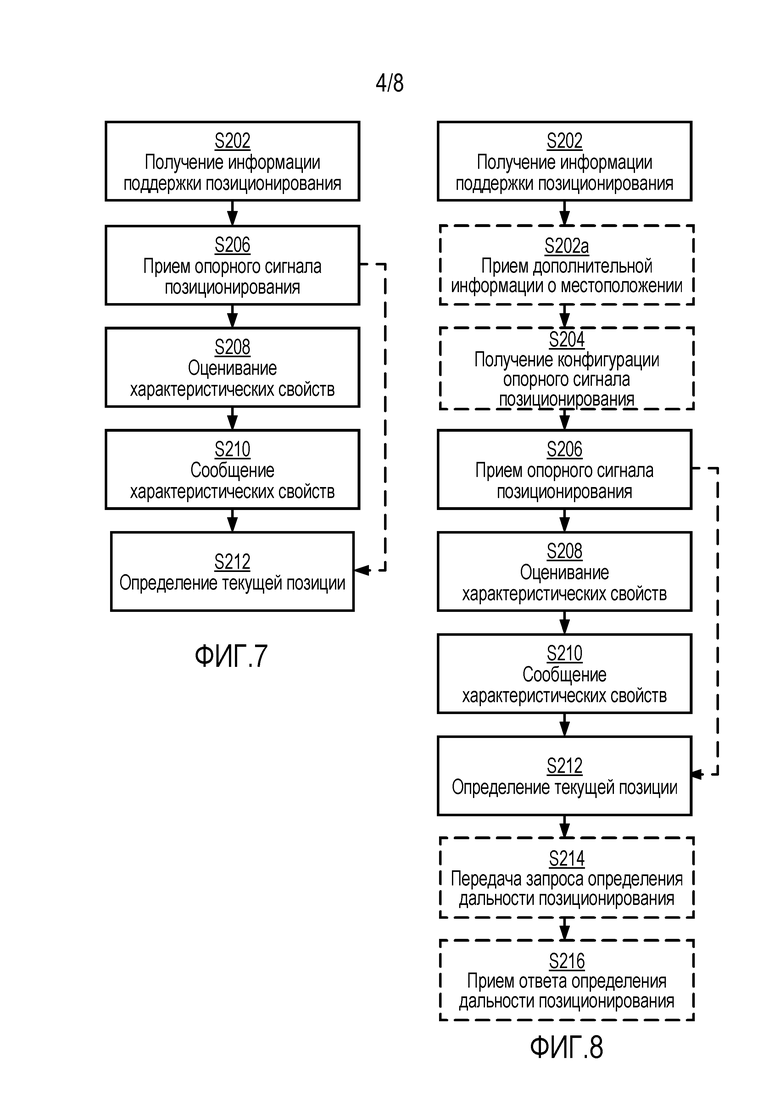
Далее дается ссылка на фиг. 7, иллюстрирующую способ получения информации позиционирования в сети 100 связи, как выполняется вторым устройством 120 согласно варианту осуществления.
Второе устройство 120 сконфигурировано, чтобы на этапе S202 получать информацию поддержки позиционирования. Информация поддержки позиционированию получается вторым устройством 120, принимающим информацию о местоположении первого устройства 110. Таким образом, информация о местоположении служит в качестве информации поддержки позиционирования для второго устройства 120. Как отмечено выше, первое устройство 110 поддерживает позиционирование других устройств 120, 130b, 140 в сети 100 связи. Информация поддержки позиционирования может быть получена от сетевого узла 140 или узла 130a, 130b радиосети в сети 100 связи или даже от первого устройства 110.
Как отмечено выше, первое устройство 110 сконфигурировано, чтобы на этапе S108 передавать опорный сигнал позиционирования. Этот опорный сигнал позиционирования, по меньшей мере согласно настоящему варианту осуществления, предположительно будет принятым вторым устройством 120. Поэтому второе устройство 120 сконфигурировано, чтобы на этапе S206 принимать опорный сигнал позиционирования от первого устройства 110. Опорный сигнал позиционирования принимается вторым устройством 120 в соответствии с конфигурацией опорного сигнала позиционирования.
Второе устройство 120 дополнительно сконфигурировано, чтобы выполнять первый набор операций S208, S210 и/или второй набор операций S212. Эти наборы операций будут раскрыты ниже.
Для выполнения первого набора операций, второе устройство 120 сконфигурировано, чтобы на этапе S208 оценивать характеристические свойства из принятого опорного сигнала позиционирования. Примеры таких характеристических свойств и то, как они могут оцениваться, будут представлены ниже.
Для выполнения первого набора операций, второе устройство 120 дополнительно сконфигурировано, чтобы на этапе S210 сообщать оцененные характеристические свойства и их ассоциацию с первым устройством к сетевому узлу 140 в сети связи. Примеры того, как второе устройство 120 может осуществлять связь с сетевым узлом 140, будут представлены ниже.
Для выполнения второго набора операций, второе устройство 120 сконфигурировано, чтобы на этапе S212 определять текущую позицию второго устройства 120. Текущая позиция второго устройства 120 определяется в соответствии с принятой информацией поддержки позиционирования. Примеры того, как второе устройство 120 может определить текущую позицию, будут представлены ниже.
Далее будут раскрыты варианты осуществления, касающиеся дополнительных подробностей получения информации о местоположении в сети 100 связи.
Как отмечено выше, второе устройство 120 дополнительно сконфигурировано, чтобы выполнять первый набор операций S208, S210 и/или второй набор операций S212. Второе устройство 120 может быть сконфигурировано, чтобы осуществлять выбор того, какой набор операций выполнять, на основе информации о конфигурации.
Могут иметься различные виды характеристических свойств. Например, характеристики могут относиться к идентификатору, ассоциированному с опорным сигналом позиционирования, временем прихода принимаемого опорного сигнала позиционирования, уровнем принятого сигнала для принимаемого опорного сигнала позиционирования, оцененной дальности принятого опорного сигнала позиционирования или их комбинации.
Могут иметься различные виды информации поддержки позиционирования. Например, информация поддержки позиционирования может содержать информацию о по меньшей мере одном инфраструктурном узле или устройстве в сети 100 связи. Например, информация поддержки позиционирования может содержать конфигурацию опорного сигнала позиционирования. Например, информация поддержки позиционирования может содержать информацию о местоположении второго устройства 120. Например, информация поддержки позиционирования может содержать направление луча, ассоциированное с опорным сигналом позиционирования, опционально также ширину луча.
Могут иметься различные виды алгоритмов определения позиционирования для определения позиции второго устройства 120 в зависимости от доступности и измерений характеристических свойств опорных сигналов позиционирования. Как правило, каждое такое измерение, обозначенное yk, k=1,…, K, где K - количество измерений, ассоциировано с моделью, которая включает в себя неизвестную позицию p второго устройства 120 и известную позицию, ассоциированную с опорным сигналом pk позиционирования. Модель также может включать в себя погрешность ek модели для описания ожидаемой погрешности в модели, например аддитивной погрешности:
yk=h(p, pk)+ek,
где h - функция измерения, представляющая либо расстояние, время прихода (TOA), разность времен прихода (TDOA), время прохождения сигнала в прямом и обратном направлении (RTT), угол прихода (AOA), уровень принятого сигнала (RSS), информацию цифровой карты, либо оценки позиции для ее входных аргументов p и pk. Существуют и другие альтернативные модели, которые не основаны на аддитивных погрешностях.
Позиция второго устройства может быть определена как позиция  , которая лучше всего объясняет измерения, например, в смысле наименьших квадратов:
, которая лучше всего объясняет измерения, например, в смысле наименьших квадратов:
где 'arg min' означает минимизирующий аргумент. Более подробная информация о различных подходящих алгоритмах определения местоположения и функциях h измерения представлена в Gustafsson, F.; Gunnarsson, F., ʺMobile positioning using wireless networks: possibilities and fundamental limitations based on available wireless network measurements,ʺ Signal Processing Magazine, IEEE, vol.22, no.4, pp. 41-53, July 2005, doi: 10.1109/MSP.2005.1458284, а также в Radnosrati, K.; Gunnarsson, F.; Gustafsson, F., ʺNew Trends in Radio Network Positioning,ʺ proceedings of the International Conference on Information Fusion, Washington DC, USA, July 2015.
Далее дается ссылка на фиг. 8, иллюстрирующую способы получения информации позиционирования в сети 100 связи, как выполняется вторым устройством 120 в соответствии с дополнительными вариантами осуществления.
Как отмечено выше, второе устройство 120 на этапе S202 принимает информацию о местоположении от первого устройства 110. Однако второе устройство 120 может дополнительно принимать дополнительную информацию о местоположении от другого устройства или узла в сети 100 связи. Поэтому, согласно варианту осуществления, второе устройство 120 дополнительно сконфигурировано, чтобы на этапе S202a принимать дополнительную информацию о местоположении от сетевого узла 140 или узла 130a, 130b радиосети в сети 100 связи.
Для того чтобы второе устройство 120 могло получать опорный сигнал позиционирования в соответствии с конфигурацией опорного сигнала позиционирования, второе устройство 120 должно быть сконфигурировано, чтобы получать доступ к такой конфигурации опорного сигнала позиционирования. Конфигурация опорного сигнала позиционирования может быть сохранена на носителе 330 данных или может быть получена от другого устройства или узла в сети 100 связи (до приема опорного сигнала позиционирования на этапе S206). Согласно варианту осуществления второе устройство 120 сконфигурировано, чтобы на этапе S204 получать конфигурацию опорного сигнала позиционирования от сетевого узла 140 или узла 130a, 130b радиосети в сети 100 связи.
Второе устройство 120 может запрашивать информацию определения дальности позиционирования от первого устройства 110. Такая информация определения дальности позиционирования может дополнительно обрабатываться вторым устройством 120, чтобы второе устройство 120 определяло свое местоположение. Следовательно, согласно варианту осуществления, второе устройство 120 сконфигурировано, чтобы на этапе S214 передавать запрос определения дальности позиционирования к первому устройству 110. Предполагается, что первое устройство 110 принимает и отвечает на запрос определения дальности. Следовательно, в соответствии с этим вариантом осуществления, второе устройство 120 сконфигурировано, чтобы на этапе S216 принимать ответ определения дальности позиционирования от первого устройства 110 в ответ на передачу запроса на этапе S214 для обеспечения возможности оценки дальности до первого устройства 110.
Могут иметься различные способы для второго устройства 120, чтобы осуществлять связь с сетевым узлом 140, узлами 130а, 130b радиосети и с первым устройством 110, соответственно. Различные примеры, относящиеся к этому, будут представлены ниже.
Например, все сообщения между вторым устройством 120 и сетевым узлом 140 могут представлять собой сообщения плоскости управления или сообщения протокола позиционирования пользовательской плоскости. Примерами таких протоколов являются LPP и SUPL.
Например, все сообщения между вторым устройством 120 и узлами 130a, 130b радиосети могут быть сообщениями протокола RRC или сообщениями протокола MAC.
Например, как отмечено выше, все сообщения между первым устройством 110 и вторым устройством 120 могут быть сообщениями протокола прямого соединения.
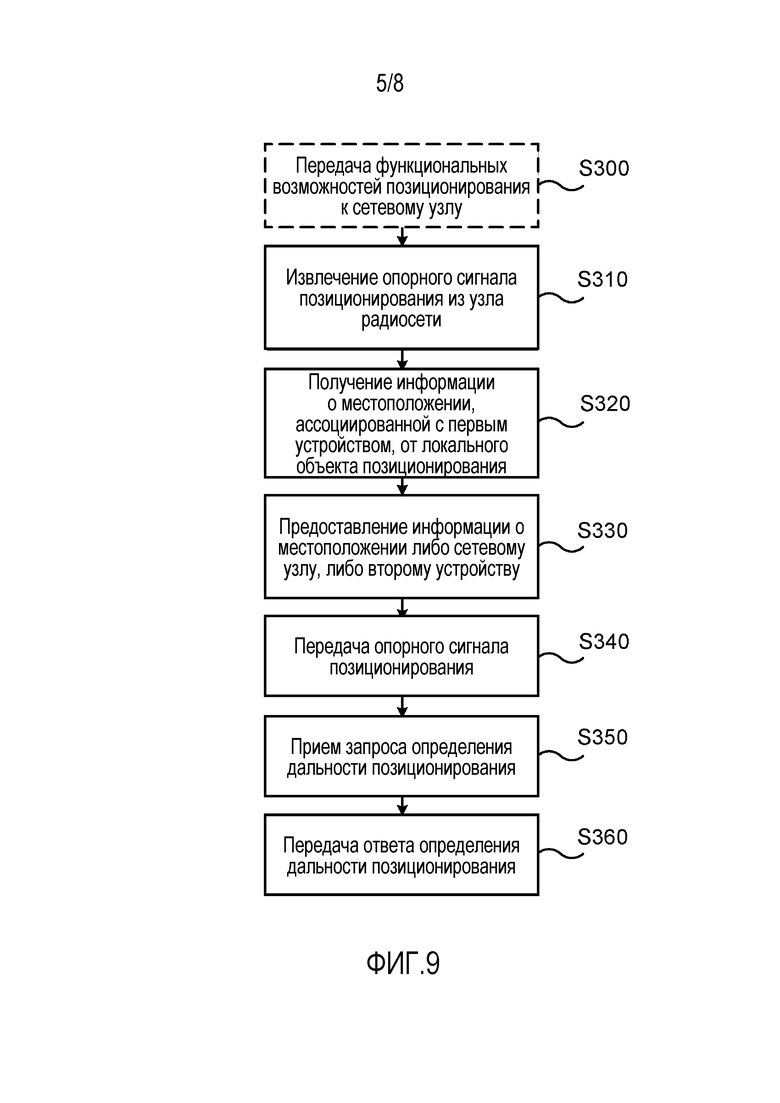
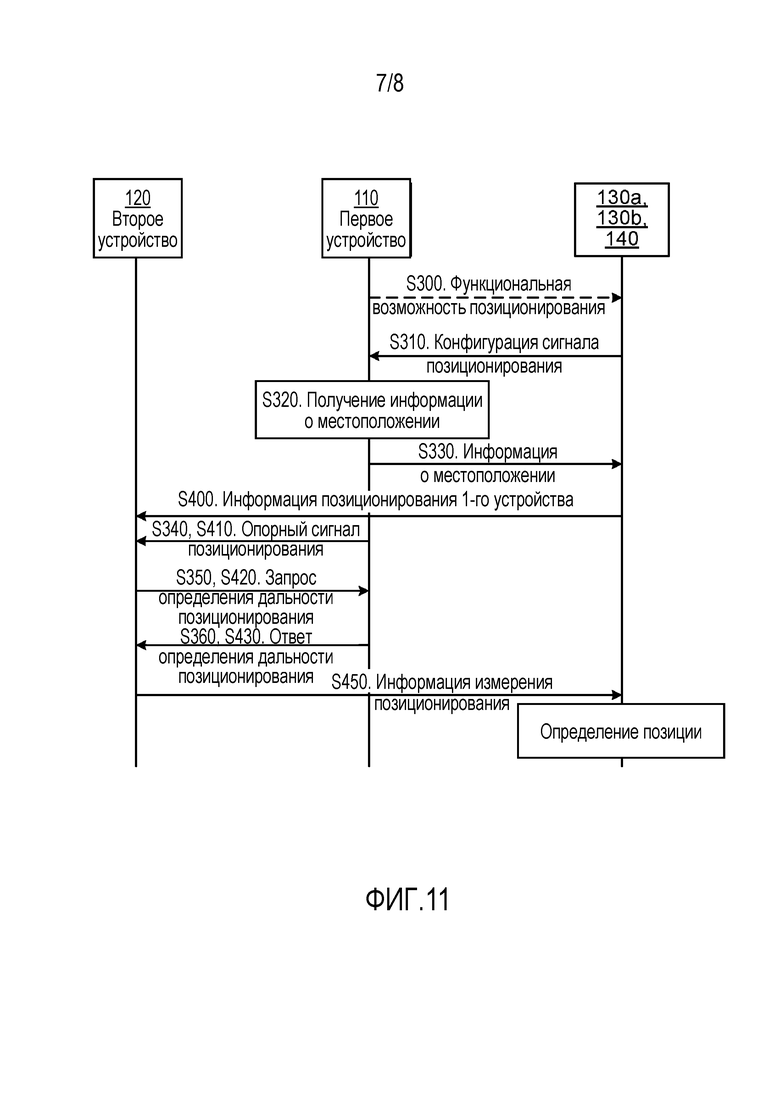
Конкретный вариант осуществления для предоставления информации позиционирования в сети 100 связи на основе по меньшей мере некоторых из вышеописанных вариантов осуществления будет теперь подробно раскрыт со ссылками на блок-схему последовательности операций согласно фиг. 9 и диаграммы сигнализации на фиг. 11 и 12.
S300 (опционально): первое устройство 110 сигнализирует о своей функциональной возможности поддержки позиционирования сетевому узлу. Одним из способов реализации этапа S300 является выполнение этапа S112.
S310: Сетевой узел 400 конфигурирует опорные сигналы позиционирования для первого устройства 110. Один из способов реализации этапа S310 состоит в выполнении этапа S102.
S320: Первое устройство 110 получает информацию о местоположении для своего собственного местоположения. Функциональная возможность устройства для само-локализации может быть обеспечена как часть этапа S300. Одним способом реализации этапа S320 является выполнение этапа S104.
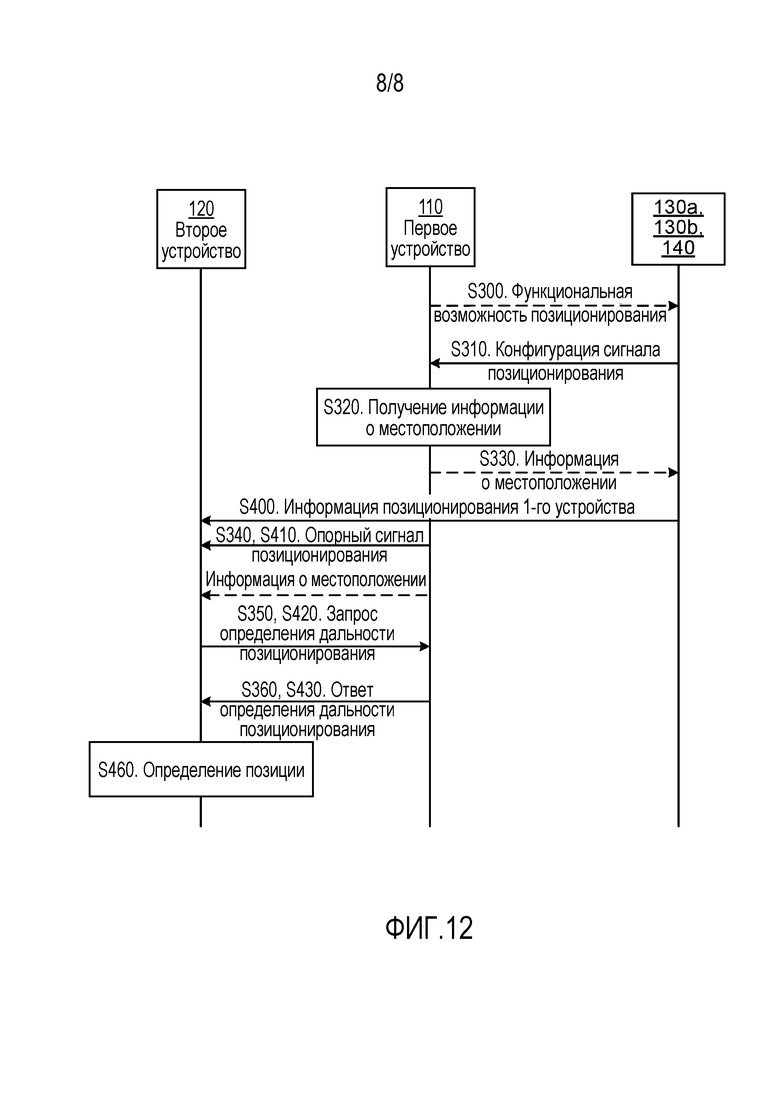
S330: Определенная информация о местоположении может быть предоставлена сетевому узлу. Альтернативой является то, что первое устройство 110 первоначально получает свою информацию о местоположении и предоставляет информацию о местоположении как часть информации о функциональной возможности поддержки позиционирования на этапе S300. Оно может даже запустить сигнализацию сообщения о функциональной возможности поддержки, когда реализована адекватная само-локализация. Еще одна альтернатива заключается в том, что информация о местоположении предоставляется непосредственно второму устройству 120, как показано на фиг. 12. Последнее имеет то преимущество, что временной интервал от получения информации о местоположении первым устройством 110 до момента, когда второе устройство 120 принимает информацию о местоположении, является коротким, что позволяет учитывать мобильные первые устройства при более высоких скоростях по сравнению с тем, как в случае отправки информации о местоположении через сетевой узел. Одним способом реализации этапа S330 является выполнение этапа S106.
S340: Первое устройство 110 передает опорный сигнал позиционирования в соответствии с конфигурацией опорного сигнала позиционирования. Одним из способов реализации этапа S340 является выполнение этапа S108.
S350: Первое устройство 110 принимает запрос определения дальности позиционирования от второго устройства 120. Один из способов реализации этапа S350 состоит в выполнении этапа S122.
S360: Первое устройство 110 отвечает на запрос определения дальности позиционирования на второе устройство 120. Один способ реализации этапа S360 состоит в выполнении этапа S124.
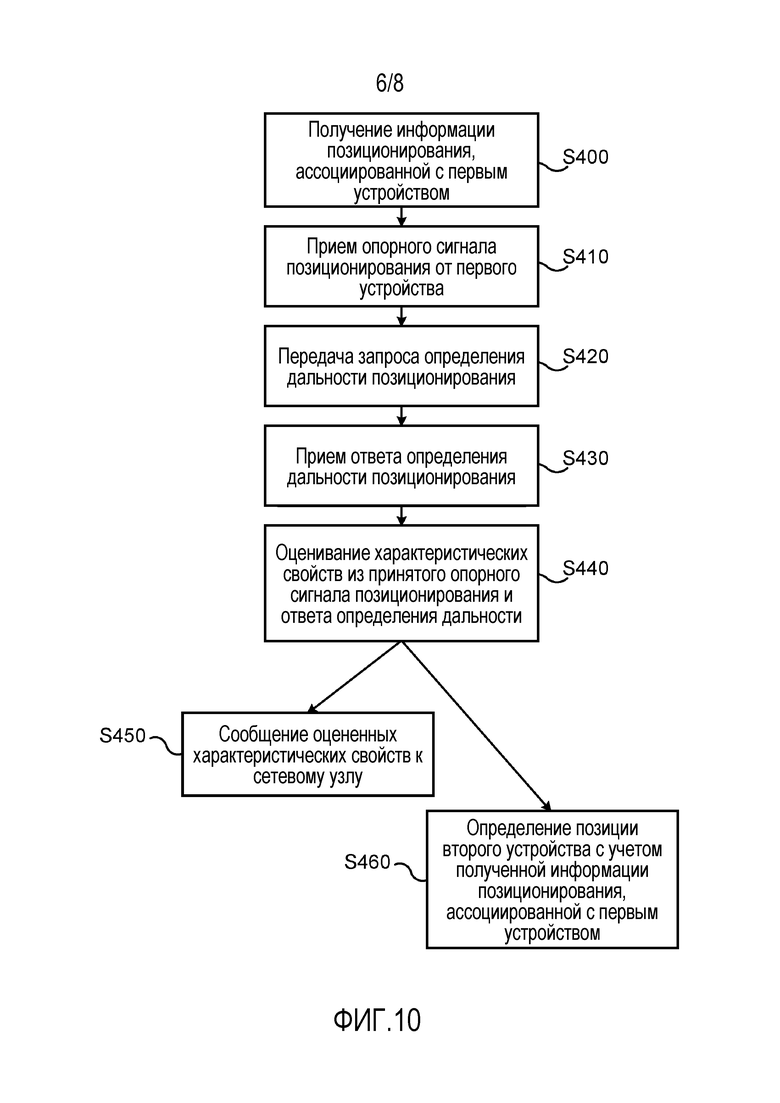
Конкретный вариант осуществления для получения информации позиционирования в сети 100 связи, основанный по меньшей мере на некоторых из вышеописанных вариантов осуществления, будет теперь подробно раскрыт со ссылками на блок-схему последовательности операций согласно фиг. 10 и диаграммы сигнализации на фиг. 11 и 12.
S400: Второе устройство 120 получает информацию позиционирования, ассоциированную с первым устройством 110. Таким образом, второе устройство 120 может обнаруживать и анализировать опорный сигнал позиционирования от первого устройства (как на этапе S410 ниже), а также принимать и декодировать опциональную сигнализацию информации о местоположении первого устройства. Один способ реализации этапа S400 состоит в выполнении этапа S02.
S410: Второе устройство 120 принимает опорный сигнал позиционирования от первого устройства 110. Один способ реализации этапа S410 состоит в выполнении этапа S206.
S420: Второе устройство 120 инициирует передачу запроса определения дальности позиционирования к первому устройству 110. Один способ реализации этапа S420 состоит в выполнении этапа S214.
S430: Второе устройство 120 принимает ответ определения дальности позиционирования от первого устройства 110 и может оценивать дальность до первого устройства 110 на основе времени, когда запрос был передан, и оцененного времени прихода ответа с учетом необходимого времени обработки в первом устройстве 110. Один способ реализации этапа S430 состоит в выполнении этапа S216.
S440: Второе устройство 120 оценивает характеристические свойства из принятого опорного сигнала позиционирования. Один способ реализации этапа S440 состоит в выполнении этапа S208.
S450: Второе устройство 120 сообщает оцененные характеристические свойства и их ассоциацию с первым устройством 110 к сетевому узлу в сети 100 связи. Один способ реализации этапа S450 состоит в выполнении этапа S210.
S460: Второе устройство 120 использует принятую и оцененную информацию для оценки позиции второго устройства 120. Один способ реализации этапа S460 состоит в выполнении этапа S212. После оценки позиции второго устройства 120, оценка позиции может сигнализироваться сетевому узлу или некоторому другому объекту в сети 100 связи.
Опорные сигналы позиционирования, определенные для LTE, разделенные на последовательность и отображение ресурсов в 3GPP TS 36.211, будут раскрыты ниже более подробно. Последовательность опорных сигналов позиционирования основана на псевдослучайной последовательности, определяемой Gold-последовательностью длины 31. В частности, выходная последовательность c(n) длины MPN, где n=0,1,…, MPN-1, определяется следующим образом:

где NC=1600 и первая m-последовательность должна быть инициализирована при  . Инициализация второй m-последовательности записывается как
. Инициализация второй m-последовательности записывается как  со значением, зависящим от применения последовательности.
со значением, зависящим от применения последовательности.
Последовательность  опорного сигнала определяется посредством
опорного сигнала определяется посредством

где ns - номер сегмента в радиокадре, l - номер символа OFDM в сегменте, где OFDM является коротким для мультиплексирования с ортогональным частотным разделением. Псевдослучайная последовательность c(i) определена в разделе 7.2 3GPP TS 36.211. Генератор псевдослучайной последовательности инициализируется с  в начале каждого символа OFDM, где
в начале каждого символа OFDM, где
где CP является коротким для циклического префикса. Кроме того, отображение на элементы ресурсов (показано только для нормального циклического префикса) приведено в разделе 7.2 3GPP TS 36.211. Последовательность  опорного сигнала отображается на комплексно-значные символы модуляции
опорного сигнала отображается на комплексно-значные символы модуляции  , используемые в качестве опорного сигнала для антенного порта р=6 в сегменте ns соответствии с
, используемые в качестве опорного сигнала для антенного порта р=6 в сегменте ns соответствии с
где для нормального циклического префикса:
Ширина полосы для опорных сигналов  позиционирования сконфигурирована более высокими уровнями, а специфический для соты сдвиг частоты задан посредством
позиционирования сконфигурирована более высокими уровнями, а специфический для соты сдвиг частоты задан посредством  .
.
Таким образом, в соответствии с некоторыми вариантами осуществления был раскрыт способ, согласно которому, опционально, первое устройство 110 предоставляет свою специфическую функциональную возможность поддержки позиционирования сетевому узлу. Когда/если сетевой узел идентифицирует необходимость поддержки позиционирования, он конфигурирует одно из нескольких первых устройств 110. Таким образом, первое устройство 110 принимает конфигурацию опорного сигнала позиционирования от сетевого узла. Первое устройство 110 также извлекает свое собственное местоположение. Первое устройство 110 отправляет информацию о местоположении либо к сетевому узлу, либо к второму устройству и передает опорный сигнал позиционирования. В соответствии с некоторыми вариантами осуществления раскрыт способ, согласно которому второе устройство 120 получает информацию поддержки позиционирования, относящуюся к первому устройству 110, и принимает опорный сигнал позиционирования от первого устройства 110. После оценки характеристических свойств принятого сигнала, второе устройство 120 выбирает на основе конфигурации, должно ли оно сообщать оцененные характеристики к сетевому узлу или определять свою позицию с учетом принятой информации и характеристик оценки.
Концепция изобретения в основном описана выше со ссылкой на несколько вариантов осуществления. Однако, как должно быть понятно специалисту в данной области техники, другие варианты осуществления, кроме раскрытых выше, одинаково возможны в пределах объема концепции изобретения, как определено прилагаемыми пунктами формулы изобретения.
Изобретение относится к сетям связи. Техническим результатом является создание эффективных механизмов для предоставления и получения информации о местоположении в сети связи. Упомянутый технический результат достигается тем, что получают конфигурации опорного сигнала позиционирования от узла радиосети в сети связи, получают информацию о местоположении от локального объекта позиционирования, предоставляют информацию о местоположении по меньшей мере одному из узла радиосети и второго устройства в сети связи, передают опорный сигнал позиционирования в соответствии с конфигурацией опорного сигнала позиционирования. 6 н. и 27 з.п. ф-лы, 14 ил.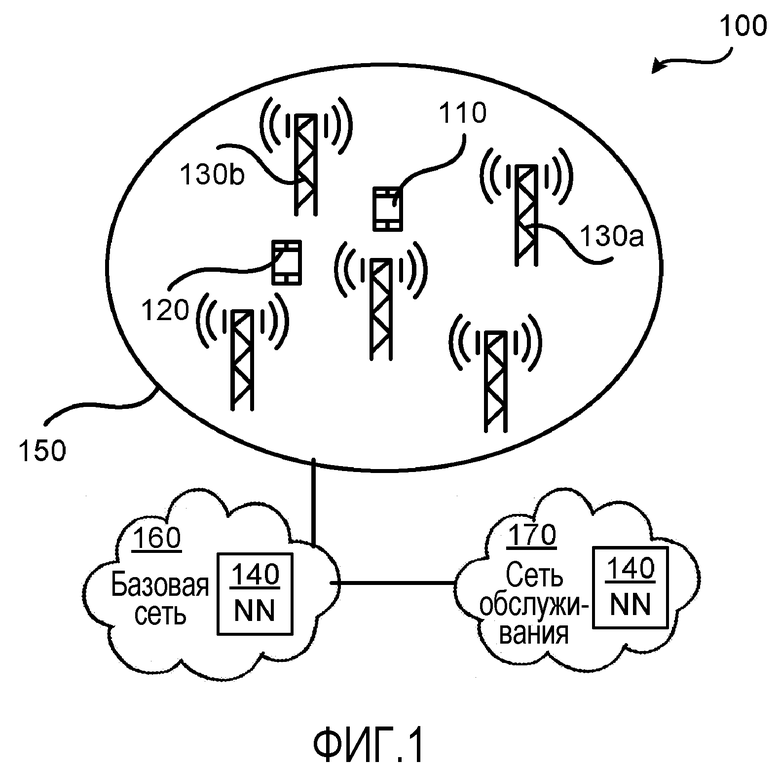
1. Способ предоставления информации о местоположении в сети (100) связи, причем способ выполняется первым устройством (110), первое устройство поддерживает позиционирование других устройств (120, 130b, 140) в сети связи, причем способ содержит:
получение (S102) конфигурации опорного сигнала позиционирования от узла (130а) радиосети в сети связи;
получение (S104) информации о местоположении от локального объекта позиционирования;
предоставление (S106) информации о местоположении по меньшей мере одному из узла (130b) радиосети и второго устройства (120) в сети связи; и
передачу (S108) опорного сигнала позиционирования в соответствии с конфигурацией опорного сигнала позиционирования, при этом
все сообщения между вторым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
2. Способ по п. 1, дополнительно содержащий:
прием (S110) от сетевого узла (140) запроса функциональных возможностей поддержки позиционирования первого устройства; и в ответ на прием упомянутого запроса
предоставление (S112) упомянутых функциональных возможностей поддержки позиционирования сетевому узлу.
3. Способ по п. 1, дополнительно содержащий:
получение (S114) указания установления соединения с узлом радиосети; и
предоставление (S116) функциональных возможностей поддержки позиционирования первого устройства узлу радиосети в ответ на прием упомянутого указания.
4. Способ по п. 1, дополнительно содержащий:
подтверждение (S118), что первое устройство является само-локализованным; и в ответ на упомянутое подтверждение
предоставление (S120) функциональных возможностей поддержки позиционирования первого устройства сетевому узлу.
5. Способ по п. 1, дополнительно содержащий:
прием (S122) запроса определения дальности позиционирования от другого устройства в сети связи; и в ответ на прием упомянутого запроса
предоставление (S124) ответа определения дальности позиционирования упомянутому другому устройству.
6. Способ по п. 5, в котором упомянутое другое устройство является упомянутым вторым устройством.
7. Способ по п. 1, в котором конфигурация опорного сигнала позиционирования определяет по меньшей мере одну из конфигурации последовательности, конфигурации шаблона ресурсов, конфигурации блока ресурсов времени/частоты и конфигурации луча для того, каким образом первому устройству передавать опорный сигнал позиционирования.
8. Способ по п. 1, в котором информация о местоположении определяет текущее местоположение первого устройства.
9. Способ по п. 1, в котором опорный сигнал позиционирования содержит идентификатор первого устройства.
10. Способ по п. 1, в котором опорный сигнал позиционирования определен, как в Долгосрочном развитии, LTE, выпуск 9.
11. Способ по п. 1, в котором локальным объектом позиционирования является глобальная система спутниковой навигации, GNSS, глобальная система позиционирования, GPS, глобальная система спутниковой навигации, GLONAS, система спутниковой навигации BeiDou, BDS, или объект с поддержкой Galileo.
12. Способ по п. 1, дополнительно содержащий:
получение (S104a) информации о скорости первого устройства; и
определение (S104b) упомянутой информации о местоположении на основе упомянутой информации о скорости.
13. Способ по п. 2 или 4, в котором все сообщения между первым устройством и сетевым узлом представляют собой сообщения плоскости управления или сообщения протокола позиционирования пользовательской плоскости.
14. Способ по п. 1 или 3, в котором все сообщения между первым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
15. Способ по п. 1, в котором все сообщения между первым устройством и вторым устройством представляют собой сообщения протокола прямого соединения.
16. Способ для второго устройства (120) для получения информации позиционирования в сети (100) связи, причем способ выполняется вторым устройством, при этом способ содержит:
получение (S202) информации поддержки позиционирования путем приема информации о местоположении первого устройства (110), причем первое устройство поддерживает позиционирование других устройств (120, 130b, 140) в сети связи, при этом информация о местоположении служит в качестве упомянутой информации поддержки позиционирования для второго устройства;
прием (S206) опорного сигнала позиционирования от первого устройства, причем опорный сигнал позиционирования принимается в соответствии с конфигурацией опорного сигнала позиционирования; и выполнение по меньшей мере одного из первого набора операций и второго набора операций, причем упомянутый первый набор операций содержит
оценивание (S208) характеристических свойств из принятого опорного сигнала позиционирования; и
сообщение (S210) оцененных характеристических свойств и их ассоциации с первым устройством к сетевому узлу (140) в сети связи; и при этом упомянутый второй набор операций содержит
определение (S212) текущей позиции второго устройства в соответствии с принятой информацией поддержки позиционирования, при этом
все сообщения между вторым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
17. Способ по п. 16, дополнительно содержащий:
получение (S204) упомянутой конфигурации опорного сигнала позиционирования от сетевого узла (140) или узла (130а) радиосети в сети связи.
18. Способ по п. 16, дополнительно содержащий:
прием (S202a) дополнительной информации о местоположении от сетевого узла (140) или узла (130а) радиосети в сети связи.
19. Способ по п. 16, в котором характеристики относятся по меньшей мере к одному из идентификатора, ассоциированного с опорным сигналом позиционирования, времени прихода принимаемого опорного сигнала позиционирования, уровня принятого сигнала принимаемого опорного сигнала позиционирования и оцененной дальности принятого опорного сигнала позиционирования.
20. Способ по п. 16, в котором информация поддержки позиционирования содержит информацию по меньшей мере об одном инфраструктурном узле и/или устройстве в сети связи.
21. Способ по п. 16, в котором информация поддержки позиционирования содержит конфигурацию опорного сигнала позиционирования.
22. Способ по п. 16, в котором информация поддержки позиционирования содержит информацию о местоположении второго устройства.
23. Способ по п. 16, дополнительно содержащий:
передачу (S214) запроса определения дальности позиционирования к первому устройству; и
прием (S216) ответа определения дальности позиционирования от первого устройства в ответ на это, чтобы обеспечить возможность оценки дальности до первого устройства.
24. Способ по п. 16, 17 или 18, в котором все сообщения между вторым устройством и сетевым узлом являются сообщениями плоскости управления или сообщениями протокола позиционирования пользовательской плоскости.
25. Способ по п. 16, в котором все сообщения между вторым устройством и первым устройством представляют собой сообщения протокола прямого соединения.
26. Устройство (110) для предоставления информации о местоположении в сети связи (100), причем устройство (110) поддерживает позиционирование других устройств (120, 130b, 140) в сети связи, причем устройство (110) содержит схему (210) обработки, причем схема обработки сконфигурирована, чтобы побуждать устройство (110) выполнять набор операций, содержащий:
получение конфигурации опорного сигнала позиционирования от узла радиосети в сети связи;
получение информации о местоположении от локального объекта позиционирования;
предоставление информации о местоположении по меньшей мере одному из узла (130b) радиосети и второго устройства (120) в сети связи; и
передачу опорного сигнала позиционирования в соответствии с конфигурацией опорного сигнала позиционирования, при этом
все сообщения между вторым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
27. Устройство (110) по п. 26, дополнительно содержащее носитель (230) хранения данных, хранящий упомянутый набор операций, и в котором схема обработки сконфигурирована для извлечения упомянутого набора операций из носителя хранения данных, чтобы побуждать устройство (110) выполнять упомянутый набор операций.
28. Устройство (110) по п. 26 или 27, в котором упомянутый набор операций предоставлен как набор исполняемых инструкций.
29. Устройство (120) для получения информации позиционирования в сети (100) связи, причем устройство (120) содержит схему (310) обработки, причем схема обработки сконфигурирована, чтобы побуждать устройство (120) выполнять набор операций, содержащий:
получение информации поддержки позиционирования путем приема информации о местоположении другого устройства (110), причем другое устройство поддерживает позиционирование других устройств (120, 130b, 140) в сети связи, при этом информация о местоположении служит в качестве упомянутой информации поддержки позиционирования для устройства (120);
прием опорного сигнала позиционирования от другого устройства, причем опорный сигнал позиционирования принимается в соответствии с конфигурацией опорного сигнала позиционирования; и по меньшей мере одного из первого набора операций и второго набора операций, причем упомянутый первый набор операций содержит
оценивание характеристических свойств из принятого опорного сигнала позиционирования; и
сообщение оцененных характеристических свойств и их ассоциации с первым устройством к сетевому узлу (140) в сети связи; и причем упомянутый второй набор операций содержит
определение текущей позиции второго устройства в соответствии с принятой информацией поддержки позиционирования, при этом
все сообщения между вторым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
30. Устройство (120) по п. 29, дополнительно содержащее носитель (330) хранения данных, хранящий упомянутый набор операций, и в котором схема обработки сконфигурирована для извлечения упомянутого набора операций из носителя хранения данных, чтобы побуждать устройство (120) выполнять упомянутый набор операций.
31. Устройство (120) по п. 29 или 30, в котором упомянутый набор операций предоставлен как набор исполняемых инструкций.
32. Машиночитаемый носитель, имеющий компьютерную программу (420а) для предоставления информации о местоположении в сети (100) связи, причем компьютерная программа содержит компьютерный код, который, при исполнении в схеме (210) обработки устройства (110), поддерживающего позиционирование других устройств (120, 130b, 140) в сети связи, побуждает устройство (110):
получать (S102) конфигурацию опорного сигнала позиционирования от узла радиосети (130а) в сети связи;
получать информацию о местоположении (S104) от локального объекта позиционирования;
предоставлять (S106) информацию о местоположении по меньшей мере одному из узла (130b) радиосети и другого устройства (120) в сети связи; и
передавать (S108) опорный сигнал позиционирования в соответствии с конфигурацией опорного сигнала позиционирования, при этом
все сообщения между вторым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
33. Машиночитаемый носитель, имеющий компьютерную программу (420b) для получения информации позиционирования в сети (100) связи, причем компьютерная программа содержит компьютерный код, который, при исполнении в схеме (310) обработки устройства (120), побуждает устройство (120):
получать (S202) информацию поддержки позиционирования путем приема информации о местоположении другого устройства (110), причем другое устройство поддерживает позиционирование других устройств (120, 130b, 140) в сети связи, при этом информация о местоположении служит в качестве упомянутой информации поддержки позиционирования для устройства (120);
принимать (S206) опорный сигнал позиционирования от другого устройства, причем опорный сигнал позиционирования принимается в соответствии с конфигурацией опорного сигнала позиционирования; и выполнять по меньшей мере один из первого набора операций и второго набора операций, причем упомянутый первый набор операций содержит
оценивание (S208) характеристических свойств из принятого опорного сигнала позиционирования; и
сообщение (S210) оцененных характеристических свойств и их ассоциации с первым устройством к сетевому узлу (140) в сети связи; и при этом упомянутый второй набор операций содержит
определение (S212) текущей позиции второго устройства в соответствии с принятой информацией поддержки позиционирования, при этом
все сообщения между вторым устройством и узлом радиосети представляют собой сообщения протокола управления радиоресурсами, RRC, или сообщения протокола управления доступом к среде, MAC.
| US 2011117926 А1, 19.05.2011 | |||
| US 2013116908 А1, 09.05.2013 | |||
| US 2013190009 А1, 25.07.2013 | |||
| US 2007184864 A1, 09.08.2007 | |||
| US 2012176270 A1, 12.07.2012 | |||
| US 2015139005 A1, 21.05.2015 | |||
| US 2007159971 А1, 12.07.2007 | |||
| US 2010232330 А1, 16.09.2010 | |||
| RU 2013111840 A, 31.01.2011. |

