Изобретение относится к машиностроению и может быть использовано в приводах различных машин, например, двигателей внутреннего сгорания, компрессоров и т.д. для поддержания частоты вращения вала в заданном диапазоне.
В настоящее время большинство приводов машин оснащаются маховиками с постоянным моментом инерции (Передерий В.П. Устройство автомобиля. - Изд-во Форум, 2011. 288 с.). Их недостатком является невозможность регулировки момента инерции маховика, вследствие чего для накопления энергии, необходимой в начале движения, требуется разгонять маховик с постоянным моментом инерции путем специальных методов пуска, что приводит к повышенному расходу энергии. В случае, если применение специальных методов пуска не выгодно или невозможно, время пуска увеличивается, что плохо сказывается на всей системе в целом.
Известен накопитель механической энергии (АС 1786322 Накопитель механической энергии / Н.В. Гулиа и А.Г. Серх), содержащий цилиндрический кожух, установленный с возможностью вращения на оси, и упругую ленту, размещенную между ними. В зависимости от частоты вращения накопителя лента разматывается или сматывается внутри кожуха, увеличивая или уменьшая момент инерции. Однако такой накопитель обладает малой удельной энергоемкостью и его использование возможно только в приводах малой механизации.
Известен маховик переменного момента инерции (патент РФ № 2516883 маховик переменного момента инерции / А.А. Война), взятый за прототип, содержащий вал, на котором жестко закреплен трехлучевой кронштейн и установлена с помощью подшипников центральная шестерня. На концах кронштейна закреплены соосно маховичные секторы, позволяющие накапливать кинетическую энергию, и зубчатые секторы, жестко соединенные с маховичными секторами. Зубчатые секторы находятся в зубчатом зацеплении с центральной шестерней. Накопитель потенциальной энергии выполнен в виде пружины, навитой вокруг вала в полости, образованной валом и центральной шестерней. Концы пружины соединены с центральной шестерней и трехлучевым кронштейном. Недостатком такой конструкции является большие радиальные размеры при высокой скорости вращения вала, что ограничивает область его применения.
Цель изобретения - уменьшение габаритов и сокращение трудозатрат на изготовление маховика при малом моменте инерции маховика в статике и увеличении махового момента в динамике.
Технический результат, достигаемый при осуществлении изобретения, заключается в легком пуске при малом моменте инерции, а по мере разгона до заявленной скорости, момент инерции увеличивается до максимального значения.
Техническая задача решается предлагаемым маховиком переменного момента инерции, содержащим вал, на котором жестко закреплен диск и через подшипник Т-образный маховик, которые цепляются друг за друга при достижении определенной скорости вращения. Для зацепки на диске имеются три стержня с массивным цилиндром на конце, которые под действием центробежных сил отбрасываются от центра к периферии, входят в углубления на маховике и жестко сцепляют маховик с диском, придавая тем самым высокий момент инерции системе в целом при достижении заданной скорости.
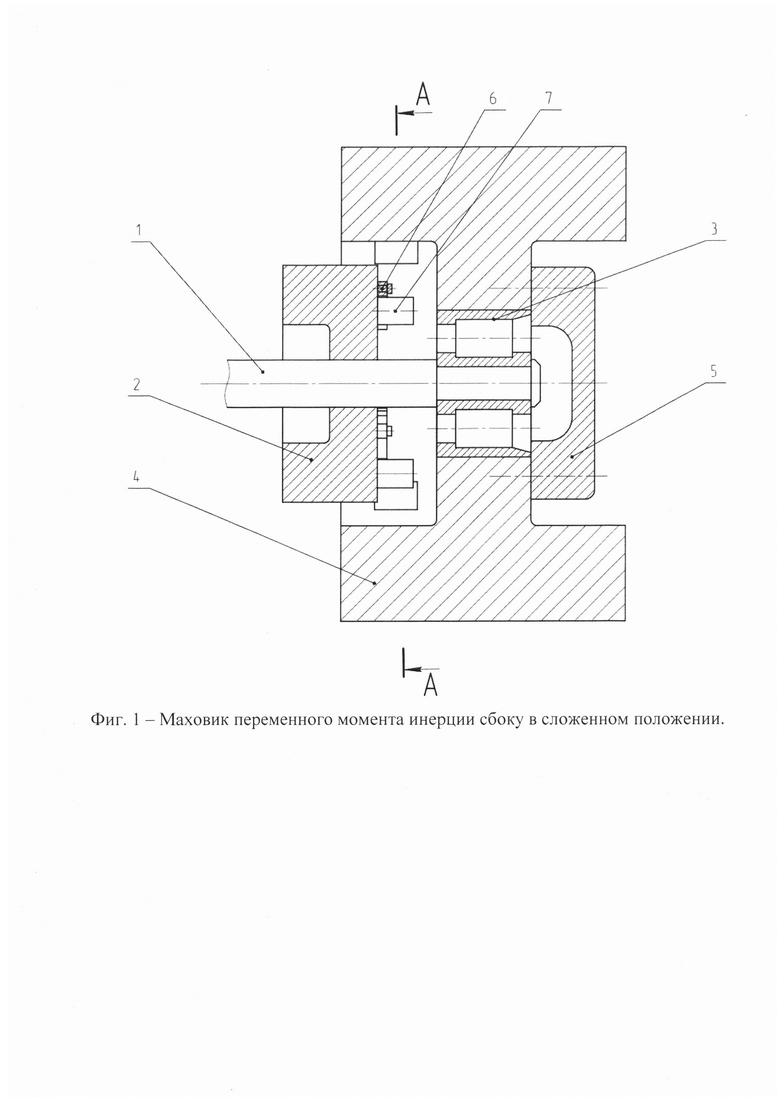
На фиг. 1 изображен маховик переменного момента инерции сбоку в сложенном положении.
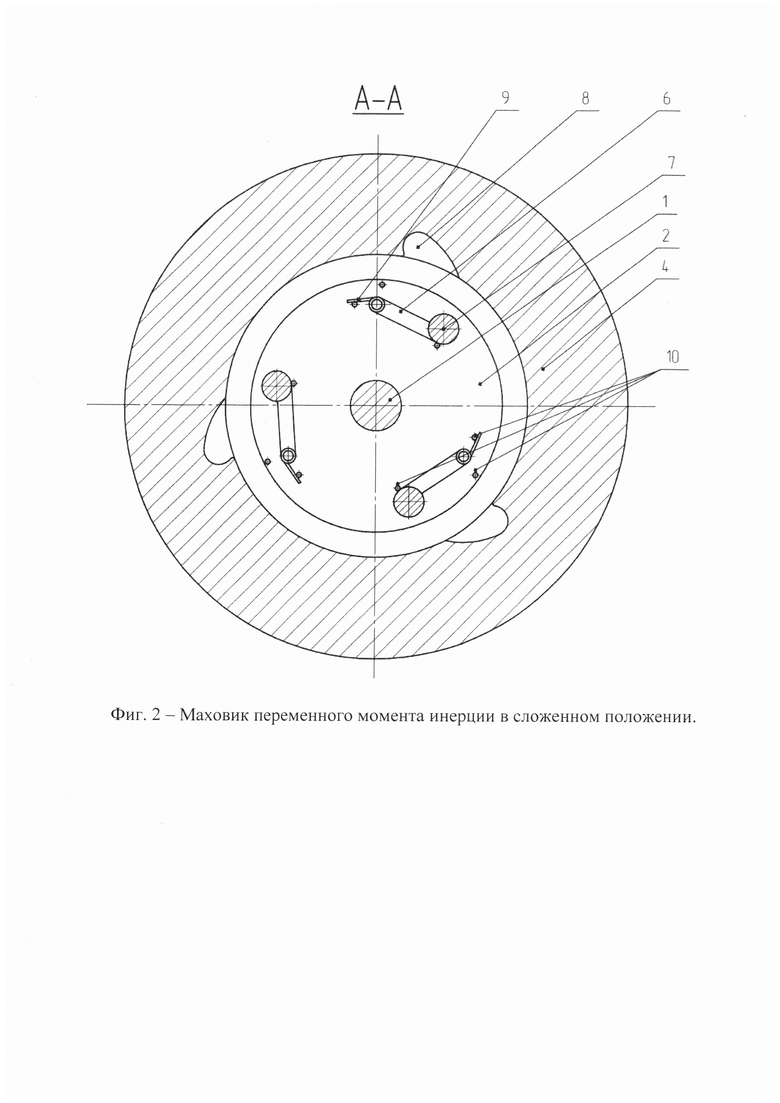
На фиг. 2 изображен маховик переменного момента инерции в сложенном положении.
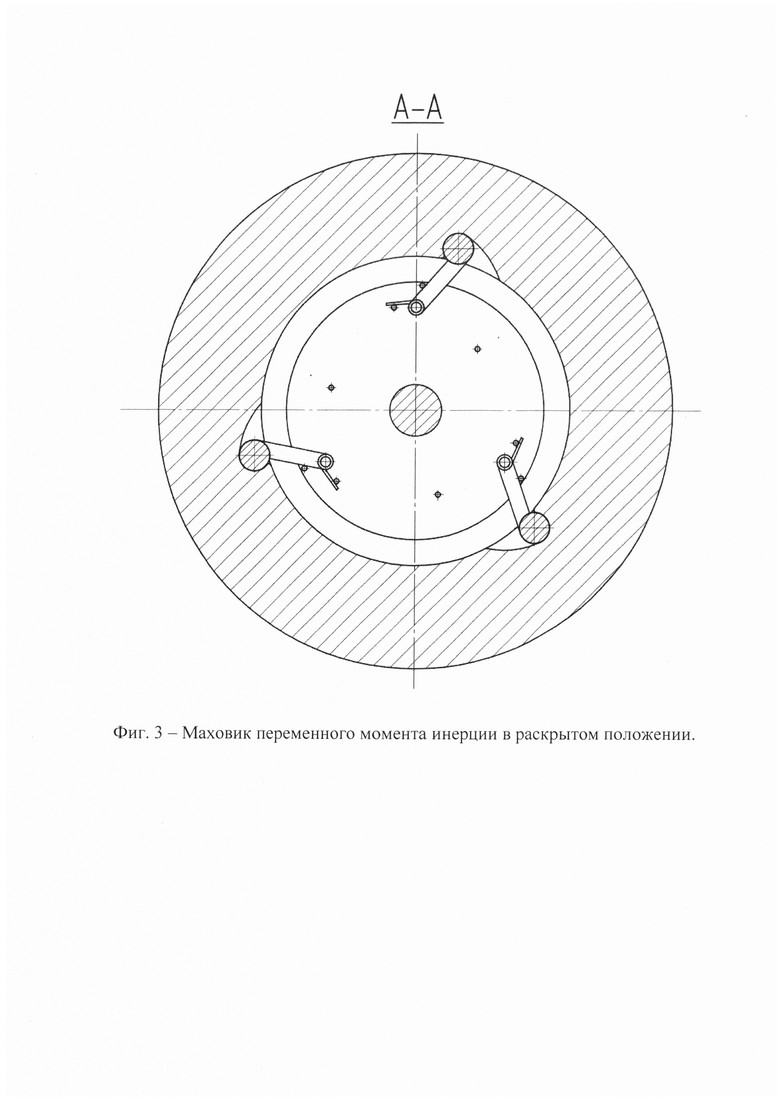
На фиг. 3 изображен маховик переменного момента инерции в раскрытом положении.
Маховик переменного момента инерции содержит вал 1, на котором жестко закреплен диск 2 и через подшипник 3 Т-образный маховик 4, для фиксации которого применяют крышку 5. На диске 2 имеются три стержня 6 с массивным цилиндром 7 на конце, который под действием центробежных сил отбрасывается от центра к периферии и тем самым войдет в углубления 8, расположенные на маховике 4. Для того чтобы стержни 6, находящиеся в нижней части диска 2 под собственным весом не опустились их в исходное положение возвращает упругая пластина 9 (её функцию может выполнять и пружина кручения), которая будет изгибаться по мере того как центробежная сила будет увеличиваться и тем самым заставлять стержни 6 поворачиваться в сторону периферии. Для ограничения максимального отклонения предусмотрены ограничители 10.
Работает маховик следующим образом. В начальный момент времени, когда вал не вращается, стержни 6 прижаты под действием упругой пластины (пружины кручения) 9 по направлению к центру; маховик 4 свободен относительно диска 2. По мере разгона стержни 6 с массивным цилиндром 7 на конце стержни будут поворачиваться вокруг своих осей вращения под действием центробежной силы. В тот момент, когда стержни повернутся на угол, позволивший массивным цилиндрам переместиться до опора с пока неподвижным маховиком 4, происходит небольшой по силе удар цилиндров с маховиком, который заставит начать двигаться маховик 4 в ту же сторону, что и диск 2. После удара стержни, получив кинетическую энергию, немного отпросятся назад, но т.к. центробежная сила будет продолжать расти, а упругая пластина (пружины кручения) будет поглощать эту энергию удара, то они снова соприкоснуться с маховиком 2 и так несколько раз, разгоняя маховик до скорость близкой к скорости вала 1 с диском 2. Когда скорость диска 2 и маховика 4 станут примерно равными, стержень 6 повернётся на такой угол, что цилиндр зацепится за углубления в маховике 4 и они станут вращаться с одной скоростью, таким образом момент инерции у предложенного маховика возрастет при выходе на рабочий диапазон вращения системы. Углубления в маховике 8 имеют такую форму, что они цепляют стержни с цилиндром на конце и система работает единым целым до тех пор, пока центробежная сила велика (частота вращения не ниже заданного уровня). В случае остановки, стержни будут возвращаться в исходное состояние и зацепление между диском 2 и маховиком 4 пропадает. Удары цилиндров 7 не изменят пусковые свойства системы, в особенности время запуска. Постепенный разгон маховика позволит избежать валу больших динамических нагрузок, которые последовали, если бы маховик зацеплялся из состояния покоя.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ СИЛОВОЙ ЭНЕРГЕТИЧЕСКИЙ АГРЕГАТ ДЛЯ АВТОМОБИЛЯ И ТРАКТОРА С ЭЛЕКТРОТРАНСМИССИЕЙ И МОТОР-КОЛЕСАМИ (ВАРИАНТЫ) | 2001 |
|
RU2184040C1 |
| Электромеханическое устройство с повышенным кинетическим моментом ротора-маховика (варианты) | 2022 |
|
RU2796643C1 |
| Узел полива | 1986 |
|
SU1426657A1 |
| КОМБИНИРОВАННЫЙ СПОСОБ НАКОПЛЕНИЯ ЭНЕРГИИ | 2013 |
|
RU2548229C2 |
| МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 2012 |
|
RU2516883C1 |
| МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 2012 |
|
RU2509241C1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| ЦЕНТРОБЕЖНЫЙ ПРЕСС-МАХОВИК (ВАРИАНТЫ) | 2021 |
|
RU2779735C2 |
| СПОСОБ РЕКУПЕРАЦИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ И ТРАНСПОРТНОЕ СРЕДСТВО С РЕКУПЕРАТОРОМ (ВАРИАНТЫ) | 2001 |
|
RU2184660C1 |
| МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 2010 |
|
RU2435084C1 |
Изобретение относится к машиностроению. Маховик переменного момента инерции содержит вал, на котором жестко закреплен диск и через подшипник Т-образный маховик. Диск и маховик цепляются друг за друга при достижении определенной скорости вращения. Для зацепки на диске имеются три стержня с массивным цилиндром на конце. Стержни под действием центробежных сил отбрасываются от центра к периферии, входят в углубления на маховике и жестко сцепляют маховик с диском, придавая тем самым высокий момент инерции системе в целом при достижении заданной скорости. Достигается лёгкий пуск при малом моменте инерции с дальнейшим увеличением при достижении заявленной скорости вращения маховика. 3 ил.
Маховик переменного момента инерции, содержащий вал, на котором жестко закреплен диск и через подшипник Т-образный маховик, которые цепляются друг за друга при достижении определенной скорости вращения, отличающийся тем, что для зацепки на диске имеются три стержня с массивным цилиндром на конце, которые под действием центробежных сил отбрасываются от центра к периферии, входят в углубления на маховике и жестко сцепляют маховик с диском, придавая тем самым высокий момент инерции системе в целом при достижении заданной скорости.
| JP H10318292 A, 02.12.1998 | |||
| JP 2018132159 A, 23.08.2018 | |||
| JP 2009024722 A, 05.02.2009 | |||
| ХРАПОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА С СИММЕТРИЧНЫМ ЗАЦЕПЛЕНИЕМ | 2004 |
|
RU2258845C1 |

