Изобретение относится к области накопления механической энергии с помощью маховичных накопителей.
Уровень техники
Известно накопление механической энергии с помощью вращения массивных маховиков (см. Накопители энергии; Учеб. пособие для вузов / Д.А. Бут и др.; Под ред. Д.А. Бута. - М.: Энергоатамиздат. 1991. - 400 с. ил.). В электромашинных накопителях энергии разгон маховиков осуществляют электродвигателями, которые во время разрядки накопителя переводят в генераторный режим.
Известен способ преобразования потенциальной энергии в кинетическую в опытах с маятником Максвелла, представляющим собой диск, жестко насаженный на горизонтальный вал, подвешенный на двух тонких нерастяжимых нитях, намотанных на вал, в котором потенциальная энергия диска переходит в кинетическую энергию его движения, складывающуюся из поступательного движения центра масс и вращения, (см. Бать М.И. и др. Теоретическая механика в примерах и задачах. / Под ред. Д.Р. Меркина. т.II. Динамика. - 7e изд., перераб. - М.: Наука. Главная редакция физико-математической литературы, 1985, с.270).
Накопленная энергия вращения диска превращается в работу подъема диска и повторения затухающих колебаний маятника.
Неотложным условием преобразования потенциальной энергии в приведенном маятнике является снижение по высоте диска, а после затухания колебаний диск необходимо поднять на исходную начальную высоту.
Из теоретической механики (см. Бать М.И. и др. Теоретическая механика в примерах и задачах: Учеб. пособие для втузов. В 3-х т. Т.II. Динамика. - 8-е изд., перераб. - М.: Наука. Гл. ред. Физ.-мат. Лит., 1991, с.556) известен пример свободного перемещения в пространстве сплошного цилиндра с горизонтальной осью. На цилиндр намотана нить, свободный конец которой движется равноускоренно вверх. Из теоретических выкладок этого источника (с.558) следует, что при ускорении движения нити вверх, в два раза большем, чем ускорение свободного падения, цилиндр будет вращаться, сохраняя центр масс неподвижным.
Если предположить, что вся нить размоталась, отсоединилась от цилиндра, а цилиндр концами своей оси оперся на неподвижные скользящие гнезда подпятников, цилиндр будет продолжать вращаться, пока не израсходуется запасенная энергия, пропорциональная силе тяжести цилиндра, его моменту инерции и времени от начала движения нити вверх до ее отсоединения. Практически время разгона цилиндра ограничивается длиной нити.
Приведенный пример в последнем источнике из теоретической механики взят в качестве прототипа предлагаемого комбинированного способа накопления энергии.
Основным недостатком накопления энергии в приведенных примерах является конечная длина нити.
Предлагаемый комбинированный способ накопления энергии устраняет зависимость накопленной энергии от длины нити.
В предлагаемом комбинированном способе накопления энергии два одинаковых по массе маховика, валы которых расположены параллельно в горизонтальной плоскости, подвешенные на вертикальных ветвях цепных передач с помощью приводного и поддерживающего петлевых захватов, раскручивают равноускоренно до допустимой скорости во взвешенном состоянии совместно энергией поля тяготения и электроприводом с помощью четырех бесконечных цепных передач, которые восходящими ветвями в приводном захвате петлеобразно охватывают по две звездочки, жестко соединенных с валами каждого маховика, а нисходящие ветви поддерживают противоположные валы с помощью специальных поддерживающих петлевых захватов.
Альтернативно, в предлагаемом комбинированном способе накопления энергии может использоваться любая гибкая передача, например зубчатая ременная передача.
После разгона маховиков до допустимой скорости электропривод с двигательного режима переключают автоматически в генераторный режим, энергию от которого накапливают в электрических накопителях, преобразуют в стандартный вид для использования потребителями. В генераторном режиме приводные захваты валов маховиков опирают на упоры. В двигательном режиме снятие с упоров автоматически производят кратковременным увеличением скорости движения цепи, после чего скорость снижается так, чтобы маховики находились во взвешенном состоянии, и потом создают равноускоренное движение цепей, при котором маховики раскручиваются во взвешенном состоянии до допустимой скорости вращения, при которой происходит переход электропривода в генераторный режим. Работа продолжается циклически. Приводные захваты включают в себя звездочки на валах маховиков и четыре направляющих ролика для создания огибания звездочки цепью. Поддерживающие захваты на противоположных ветвях цепей выполнены аналогично, только вместо звездочки используется ролик, свободно вращающийся на валу маховика. Каждые две пары восходящих ветвей цепной передачи, симметрично расположенные по отношению к маховику вдоль его оси, приводят в движение с помощью зубчатых передач от электропривода, нисходящие ветви проходят через поддерживающие захваты на противоположном валу с маховиком. Каждый вал с маховиком переплетен четырьмя ветвями цепных передач и в двигательном режиме взаимно уравновешивают друг друга.
В исходном состоянии корпуса приводных захватов валов маховиков опираются на упоры. Включают электропривод, раскручивают маховики до начальной скорости около 10% от максимальной, на короткое время резко увеличивают скорость так, чтобы между упорами и приводными захватами валов образовался зазор около 0,1-0,5 мм, затем скорость снижают, добиваясь взвешенного состояния маховиков, и с этого момента скорость ускоренно увеличивают до максимальной скорости вращения, после чего электропривод переводят в генераторный режим, приводные захваты валов маховиков опускаются на упоры.
Разрядку маховичного накопителя продолжают до тех пор, пока скорость вращения не снизится до 10% от максимальной скорости, и работа продолжается циклически. Зазор между захватами валов маховиков и упорами контролируется датчиками положения, по сигналам которых микропроцессорное устройство управления регулирует скорость движения цепей согласно установленной программе.
Электропривод работает на уравновешенную нагрузку, которую создают за счет двух маховиков, которые образуют взаимные противовесы друг другу в двигательном режиме электропривода.
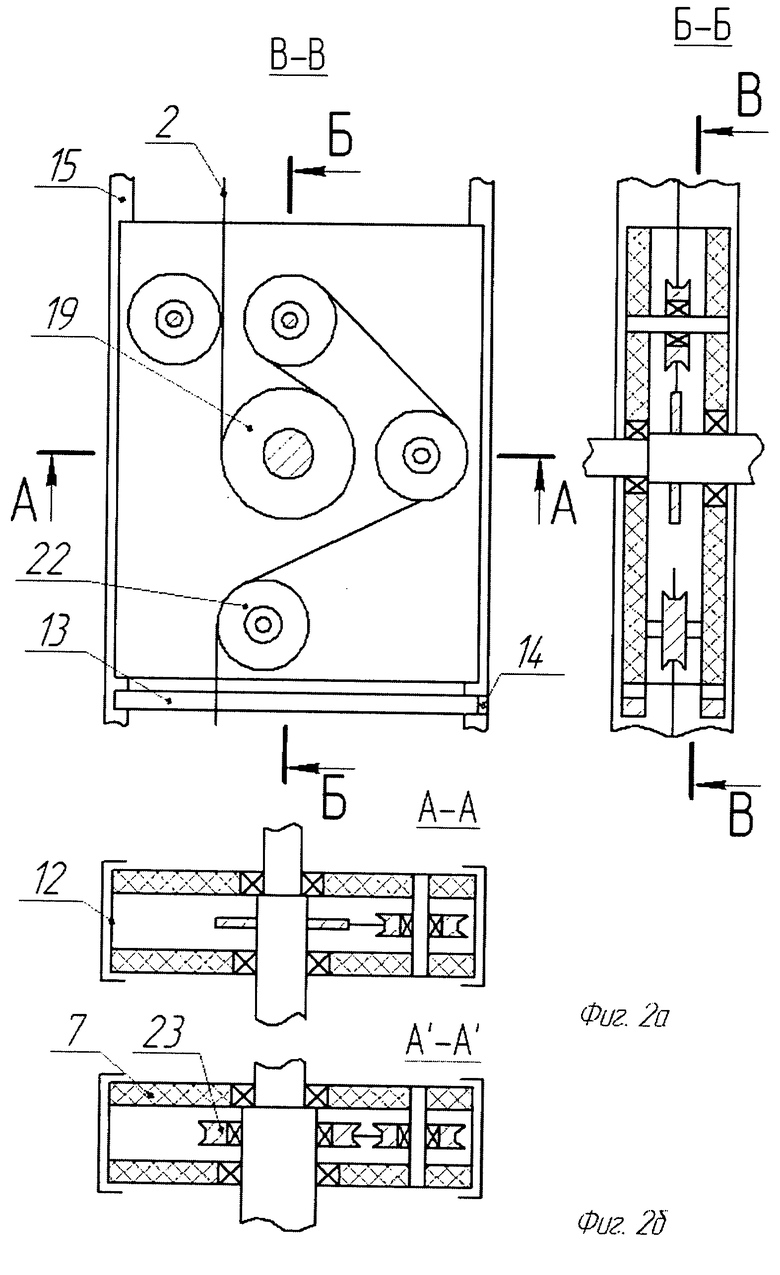
Схема способа показана на фиг.1, а на фиг.2а и 2б представлены схемы приводного и поддерживающего петлевых захватов.
Пример осуществления изобретения.
В жестком корпусе 1 (фиг.1) закрепляют четыре цепных передачи 2, два привода зубчатых передач 3, два одинаковых по массе маховика 4,5 с двумя приводными петлевыми захватами 6 и двумя поддерживающими петлевыми захватами 7 на каждом валу 8.
Валы маховиков расположены параллельно в горизонтальной плоскости посередине высоты жесткого корпуса.
Симметрично относительно центров маховиков по обе стороны расположены по две цепные передачи, причем крайние цепи движутся в одном направлении, средние - в противоположном. Цепи приводятся в движение электроприводом 9, включающим одну электрическую машину, работающую в двух режимах - двигательном и генераторном, редуктор 10 с двумя одинаковыми выходами 11, каждый связан с двумя цепями одного направления.
Каждый выход редуктора нагружен на взаимно уравновешенную нагрузку, например, состоящую из силы тяжести первого маховика 4, действующего на вертикальные восходящие ветви цепных передач и силы тяжести второго маховика 5, действующую на цепную передачу через поддерживающие петлевые захваты 7 в нисходящих ветвях.
Аналогично нагружен другой вал редуктора силой тяжести маховика 5, действующей на свою пару вертикальных восходящих ветвей цепной передачи и силой тяжести первого маховика 4, действующую на цепную передачу через поддерживающие петлевые захваты в нисходящих ветвях.
Корпуса приводных петлевых захватов 12 (фиг.1 и фиг.2а) в исходном и генераторном режимах опираются на упоры 13. Зазор между захватами и упорами контролируют датчиками положения 14. Корпуса всех захватов имеют свободу движения только в вертикальной плоскости по направляющим 15. Каждая цепь содержит две звездочки: одна - ведущая 16, жестко сопряжена с шестерней привода 17, свободно вращается на оси 18 (фиг.1), другая 19 (фиг.2а) - жестко соединена с валом 8 маховика (фиг.1). Кроме звездочек, каждая цепь содержит двенадцать роликов: три ролика 20 поддерживают цепь на одной верхней оси 18 и двух нижних 21 (фиг.1), по четыре ролика 22 используются в устройствах приводных петлевых захватов (фиг.2а). В поддерживающих петлевых захватах (фиг.2б) используется пять роликов 23 (фиг.2б). Расстояние между валами в горизонтальной плоскости выбирают из условий обеспечения минимального зазора между поверхностями вращающихся маховиков. Регулировку провисания цепей производят перемещением нижних осей 21. Смазка цепей происходит в масленой ванне 24. Микропроцессорное устройство управления 25 электроприводом 9 получает сигналы с датчика положения 14, с датчика скорости вращения 26 электропривода 9, с датчика температуры 27 масла в ванне 24, посылает сигналы управления электроприводом и накопителем 28 сообразно установленной программе.
Приводной петлевой захват состоит из корпуса 12, в котором на подшипниках закреплены четыре направляющих ролика 22, и на валу маховика, проходящем через подшипники в корпусе 12, жестко насажена ведомая звездочка 19. Корпус захвата может свободно двигаться вверх и вниз вдоль цепи 2 по скользящим направляющим 15 и опираться на упор 13, жестко связанный с корпусом направляющих. Зазор между корпусом захвата и упором контролируется датчиком положения 14. Корпус направляющих жестко связан с корпусом 1 цепной передачи 2 (фиг.1).
Схема поддерживающего петлевого захвата (фиг.2б) аналогична схеме приводного петлевого захвата, отличается лишь тем, что вместо звездочки на валу маховика свободно вращается на подшипнике ролик 23 и отсутствуют упоры под корпусом захвата.
По установленной программе в микропроцессорном устройстве управления 25 включают электропривод 9, раскручивают маховики 4,5 до начальной скорости около 10% от максимальной, на короткое время резко увеличивают скорость так, чтобы между упорами 13 и приводными захватами 12 образовался зазор около 0,1-0,5 мм, затем скорость снижают, добиваясь взвешенного состояния маховиков, и с этого момента скорость ускоренно увеличивают до максимальной скорости вращения, после чего электропривод переводят в генераторный режим, приводные захваты 12 валов маховиков 4,5 опускаются на упоры 13. Разрядку маховичного накопителя продолжают до тех пор, пока скорость вращения не снизится до 10% от максимальной, снова по программе включается двигательный режим и работа продолжается циклически, непрерывно до команды на останов.
Альтернативно, другой пример осуществления изобретения может быть с использованием зубчатой ременной передачи или любой гибкой передачи вместо цепной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМБИНИРОВАННОГО НАКОПЛЕНИЯ ЭНЕРГИИ | 2021 |
|
RU2771214C1 |
| РАЗГОННОЕ УСТРОЙСТВО ДЛЯ ВЗЛЕТА КОРАБЕЛЬНЫХ САМОЛЕТОВ | 2019 |
|
RU2712407C1 |
| ПРИВОД ШТАНГОВОГО ГЛУБИННОГО НАСОСА | 1999 |
|
RU2160852C1 |
| Способ управления торможением и реверсом многодвигательного гребного электропривода с несколькими винтами | 2016 |
|
RU2665052C2 |
| СПОСОБ РЕКУПЕРАЦИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ И ТРАНСПОРТНОЕ СРЕДСТВО С РЕКУПЕРАТОРОМ (ВАРИАНТЫ) | 2001 |
|
RU2184660C1 |
| Накопительное устройство к разматывателям проволоки | 1976 |
|
SU650687A1 |
| ЛИНИЯ ДЛЯ ВЫРАБОТКИ ХЛЕБОБУЛОЧНЫХ ИЗДЕЛИЙ НА ЛИСТАХ | 1971 |
|
SU424550A1 |
| Электромеханический накопитель энергии в сети переменного тока | 1977 |
|
SU720620A1 |
| Устройство для накопления лотков с корпусами конфет к установке ускоренной выстойки | 1977 |
|
SU759080A1 |
| Стартер-генератор с дифференциальным электроприводом и способ управления стартер-генератором | 2019 |
|
RU2711097C1 |
Комбинированный способ накопления энергии заключается в том, что два одинаковых по массе маховика, валы которых расположены параллельно в горизонтальной плоскости, подвешены на вертикальных ветвях цепных передач с помощью приводного и поддерживающего петлевых захватов, раскручивают равноускоренно до допустимой скорости во взвешенном состоянии совместно энергией поля тяготения и уравновешенным электроприводом с помощью четырех бесконечных цепных передач. После разгона маховиков электропривод автоматически переключается в генераторный режим, энергию накапливают в электрических накопителях, преобразуют в стандартный вид для использования потребителями. В исходном и в генераторном режимах корпуса приводных захватов опираются на упоры. В двигательном режиме снятие с упоров автоматически производят кратковременным резким увеличением скорости движения цепей, после чего скорость снижается так, чтобы маховики вошли во взвешенное состояние и потом создают равноускоренное движение цепей, при котором маховики раскручиваются во взвешенном состоянии до допустимой скорости вращения. Достигаемый результат заключается в том, что работа накопителя энергии продолжается циклически, непрерывно и не ограничивается длиной цепи. 1 з.п. ф-лы, 3 ил.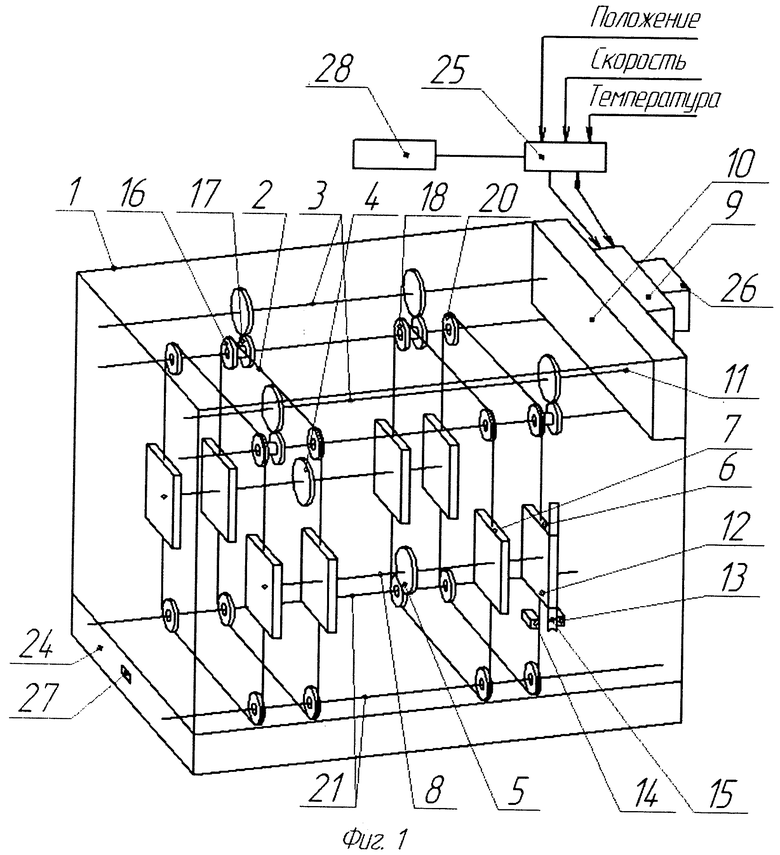
1. Комбинированный способ накопления энергии, заключающийся в том, что два одинаковых по массе маховика, валы которых расположены параллельно в горизонтальной плоскости, подвешены на вертикальных ветвях цепных передач с помощью приводного и поддерживающего петлевых захватов, раскручивают равноускоренно до допустимой скорости во взвешенном состоянии совместно энергией поля тяготения и электроприводом с помощью четырех бесконечных цепных передач, которые двумя восходящими ветвями в приводном захвате петлеобразно охватывают по две звездочки, жестко соединенных с валом каждого маховика, а нисходящие ветви поддерживают противоположный вал с помощью поддерживающих петлевых захватов, переключают электропривод с двигательного режима в генераторный, электрическую энергию накапливают в электрических накопителях, преобразуют в стандартный вид для использования потребителями, в генераторном режиме приводные захваты валов маховиков опираются на упоры до тех пор, пока скорость вращения не снизится до 10% от максимальной, вновь автоматически включается двигательный режим, приводные петлевые захваты снимаются с упоров кратковременным увеличением скорости движения цепи, после чего скорость снижается так, чтобы маховики находились во взвешенном состоянии, и потом создают равноускоренное движение цепей, при котором маховики раскручиваются во взвешенном состоянии до допустимой скорости вращения, включается генераторный режим, работа продолжается циклически, непрерывно.
2. Cпособ по п.1, отличающийся тем, что маховики уравновешивают друг друга за счет поддерживающих петлевых захватов в нисходящих ветвях цепной передачи.
| US 2011079106 A1, 07.04.2011 | |||
| Инерционный накопитель энергии | 1987 |
|
SU1605054A1 |
| Механизм для поддержания вращения маховика | 1986 |
|
SU1388619A1 |

