Предполагаемое изобретение относится к электроэнергетике и может быть использовано для измерения статического эксцентриситета ротора электрической машины.
Наиболее близким к предлагаемому является способ определения эксцентриситета ротора в электрической машине, основанный на измерении емкости относительно элементов ее конструкции и формировании сигнала о наличии эксцентриситета (А.С. СССР №1332466, Официальный бюллетень №31, Опубл. 23.08.1987).
Однако устройство по этому способу обладает недостаточной чувствительностью и надежностью функционирования из-за того, что измерение емкости осуществляется относительно зубчатой поверхности сердечника ротора. В связи с этим требуется его отстройка и защита от воздействия зубчатости сердечника ротора, мощного магнитного и электрического поля в области воздушного зазора. Кроме того, установка и обслуживание датчика такого устройства невозможна без разборки электрической машины, само устройство не позволяет определять направление перемещения ротора при его эксцентриситете.
Технический результат - повышение чувствительности и надежности функционирования, расширение функциональных возможностей, а также упрощение установки и обслуживания.
Технический результат достигается тем, что емкости измеряют относительно вала ротора в четырех точках, расположенных по парно на горизонтальной и вертикальной осях его симметрии, сравнивают каждую из них с эталонной емкостью и если разность между измеренной и эталонной емкостями превысит установленную величину формируют сигнал о наличии и направлении перемещения ротора.
Предлагаемый способ заключается в том, что измерение емкости осуществляется относительно вала ротора в четырех точках, расположенных по парно на горизонтальной и вертикальной осях его симметрии. Что позволяет избавиться от воздействия зубчатости сердечника ротора, мощного магнитного и электрического поля в воздушном зазоре электрической машины, сократить до минимума длину коммутирующих проводов и четко контролировать направление перемещения ротора по горизонтальной и вертикальной оси.
Сопоставительный анализ с прототипом показывает, что заявляемое техническое решение отличается от известного технического решения числом, последовательностью и назначением операций.
Сравнение заявляемого технического решения с известным техническим решением показывает, что такие операции известны. Однако использование их в указанной связи проявляет в заявляемом способе новые свойства.
Блок схема устройства для реализации предлагаемого способа изображена на фиг. 1. Это устройство представляет собой емкостные датчики 1-4 объединенные в блок 5 емкостных датчиков, которые через измерительные мосты 6-9 присоединены к фильтрам 10-13. Питание измерительных мостов 6-9 осуществляется источником 14 переменного тока, а фильтров 10-13 источником 15 постоянного тока. К выходам фильтров 10-13 подключены пороговые элементы 16-23, выхода которых, в свою очередь, подключены к блоку индикации 24 и к блоку формирования отключающего сигнала 25.
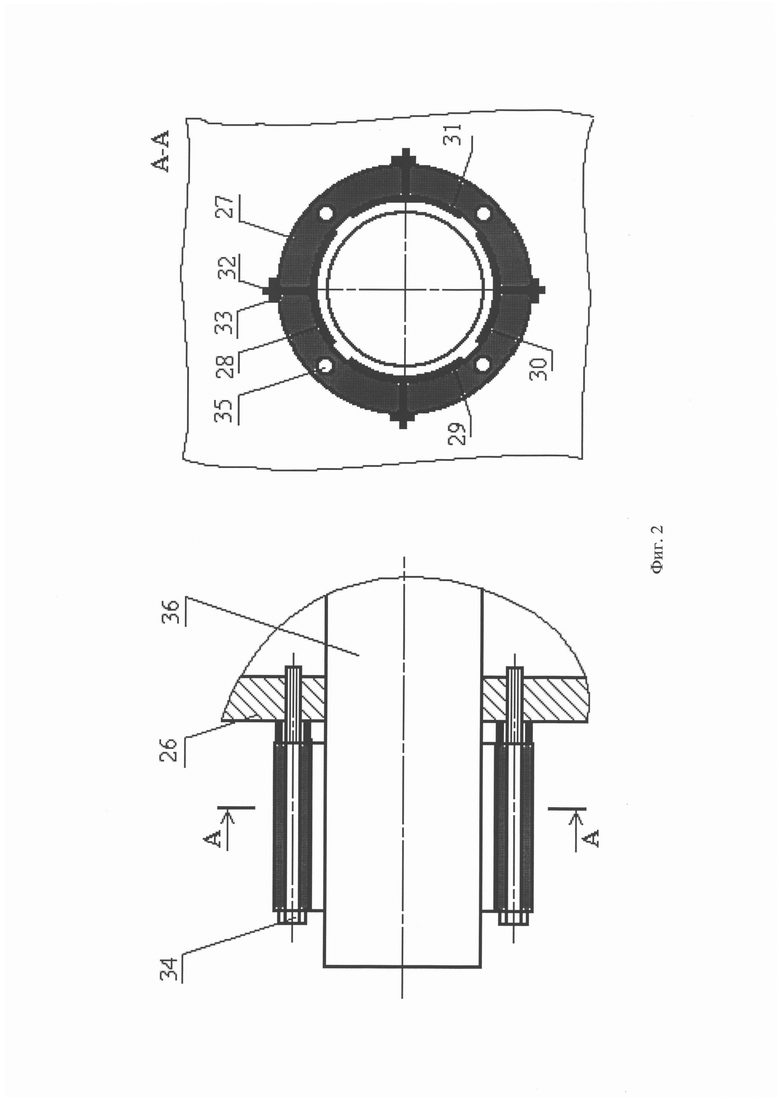
Конструкция и крепление блока 5 емкостных датчиков на корпусе электрической машины 26 показано на фиг. 2. Корпус 27 блока 5 емкостных датчиков имеет форму тора и выполняется из диэлектрического материала. Емкостные датчики 1-4 в виде металлических пластин 28-31 с помощью винтов 32 и гаек 33 закрепляются на корпусе так, как показано на фиг 2. Крепление корпуса 27 к корпусу электрической машины 26 осуществляется болтами 34, которые вставляются в отверстия 35 корпуса 27 блока 5 емкостных датчиков. Таким образом, одним электродом емкостных датчиков 1-4 являются пластины 28-31, а другим вал ротора 36 электрической машины.
В устройстве для реализации предлагаемого способа каждый из емкостных датчиков 1-4 регистрирует перемещение ротора только в своем направлении. Так емкостной датчик 1 предназначен только для контроля перемещения ротора вверх. Величина его емкости при смещении на величину d ротора 36 определяется по зависимости, приведенной на фиг. 3, где δ - величина воздушного зазора.
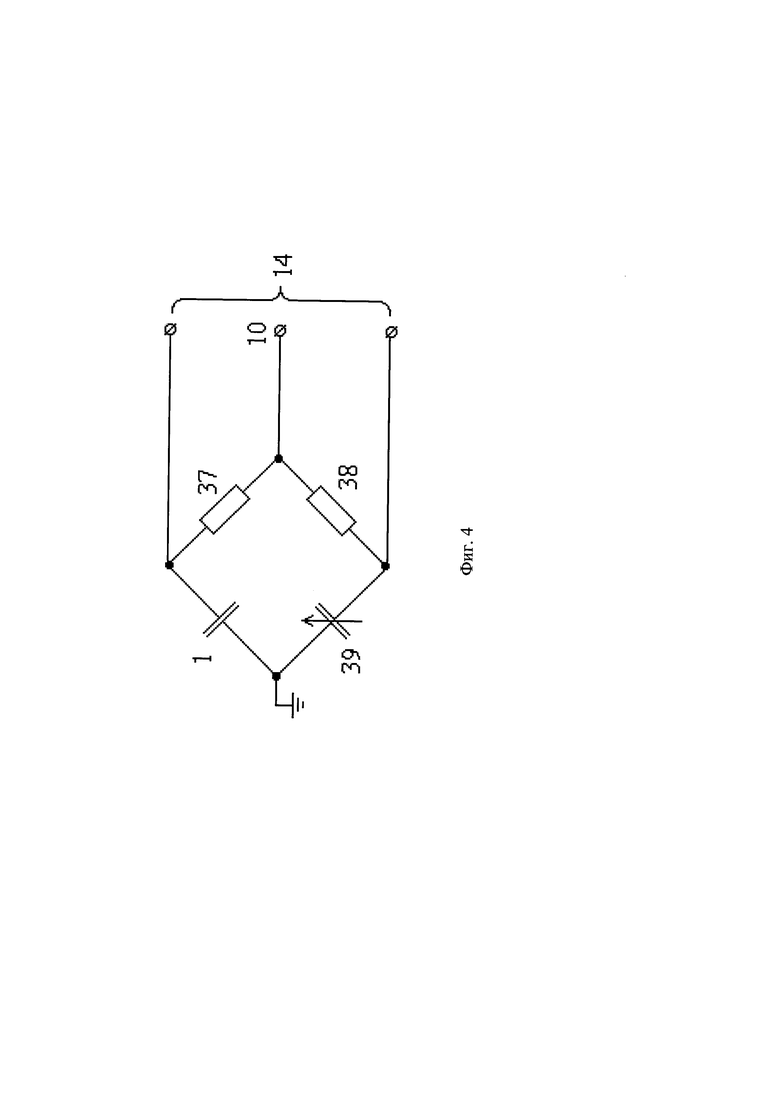
Схема измерительного моста 6 приведена на фиг. 4. Измерительный мост 6 содержит два активных резистора 37 и 38, а также подстроечный конденсатор 39, который для данного измерительного моста является эталонной емкостью. С его помощью осуществляется балансировка измерительного моста 6 с емкостным датчиком 1 перед введением устройства в работу таким образом, чтобы напряжение U6 на выходе измерительного моста 6 было равно нулю. Для питания измерительного моста 6 используется источник переменного тока 14 со стабилизованной частотой и напряжением. Конструкция измерительных мостов 7-9, их подключение и балансировка выполняется аналогично.
Фильтры 10-13 полосовые и настроенные на частоту источника переменного тока 14. Их использование позволяет избавиться от влияния на работу устройства диагностики эксцентриситета ротора различного рода наводок. Конструктивно они могут выполняться как в аналоговом, так и в цифровом исполнении.
Пороговые элементы 16-23 представляют собой электронные или электромеханических реле. Пороги срабатывания пороговых элементы 16, 18, 20 и 22, а также 17, 19, 21 и 23 принимается равными Ucp1 и Ucp2 соответственно, где Ucp1 и Ucp2 - напряжения на выходе фильтров 10-13. Величины Ucp1 и Ucp2 выбираются по зависимости U6=f(d) на фиг. 5 при величине смещения ротора по вертикали на величину d1 и d2, где напряжения U6 на выходе фильтра 6.
Из фиг. 1 видно, что смещение по вертикали вверх приводит к уменьшению расстояния между пластиной датчика 1 и поверхностью вала. В тоже время устройство не должно работать при смещении вниз, когда расстояния между пластиной датчика 1 и поверхностью вала увеличивается. В результате при d=2δ напряжение на выходе фильтра будет равно U6. Чтобы устройство реагировало только на перемещение ротора вверх порог срабатывания пороговых элементов 16, 18, 20 и 22 следует принимать равным Ucp1=U6kотс, где kотс - коэффициент отстройки. Этому напряжению по фиг. 5 соответствует смещение ротора на d1 вверх.
В тоже время величина максимальной величины смещения ротора вверх не должна превышать d2=0,85δ. Это обусловлена наличием у любой электрической машины технологического эксцентриситета, который обычно составляет порядка (0,1-0,15)δ, То есть смещение ротора вверх более чем на величину d2 сопровождается задеванием сердечника ротора за сердечник статор и их повреждением. Чтобы этого не происходило порог срабатывания пороговых элементов 16, 18, 20 и 22 следует принимать равным напряжению Ucp2, которое определяется по зависимости U6=f(d) и величине смещения d2.
Блок индикации 24 предназначен для отображения информации о наличии и величине смещения ротора электрической машины и может представлять собой, например, табло на светодиодных индикаторах.
Блок формирования отключающего сигнала 25 может быть выполнен в виде электрического или электронного реле.
Если в электрической машине эксцентриситет ротора отсутствует, то емкости датчиков 1-4 одинаковы, а напряжения на выходе фильтров 10-13 не превышают порога срабатывания Ucp1 пороговых элементов 16-23. Поэтому сигнал на выходе пороговых элементов 16-23 отсутствует, электрическая машина продолжает работать, а блок индикации выдает информацию об отсутствии смещения ротора.
Если ротор начинает сдвигаться по вертикали вверх, то емкость датчика 1 увеличивается, В результате на выходе измерительного моста 6 и фильтра 10 напряжение возрастает. И если оно превысит порог срабатывания Ucp1 порогового элемента 16, то пороговый элемент сформирует сигнал о наличии и направления смещения. Блок 24 отразит информацию «СМЕЩЕНИЕ ВВЕРХ». Если при дальнейшем смещении ротора напряжение на выходе фильтра 10 превысит порог срабатывания Ucp2 порогового элемента 17, то этот пороговый элемент сформирует сигнал о величине и направления смещения, а также на отключение электрической машины с помощью блока 25. Блок 24 отразит информацию «СМЕЩЕНИЕ ВВЕРХ». При смешении вниз, влево и вправо устройство работает аналогично.
Технико-экономическая эффективность предлагаемого способа заключается в возможности разработки устройства диагностики, которое за счет расширения функциональных возможностей и области применения, а также повышение чувствительности позволяет своевременно выявить наличие и величину эксцентриситета ротора, а следовательно сократить размеры повреждения машины и перерасход электроэнергии, а также стоимость и время послеаварийного ремонта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ выявления степени износа подшипников качения главного вала ветроэнергетической установки | 2024 |
|
RU2821843C1 |
| СПОСОБ ЗАЩИТЫ ОТ ЭКСЦЕНТРИСИТЕТА РОТОРА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2530727C1 |
| Способ диагностики эксцентриситета ротора электрической машины переменного тока | 2018 |
|
RU2683583C1 |
| Способ защиты синхронного двигателя переменного тока от витковых замыканий | 2016 |
|
RU2677225C2 |
| Устройство для контроля изоляции обмотки трехфазной электрической машины | 1985 |
|
SU1330695A1 |
| Устройство для защиты от утечки тока в контактной сети электровозной откатки | 1990 |
|
SU1728917A1 |
| Способ защиты от эксцентриситета ротора электрической машины переменного тока | 2017 |
|
RU2655913C1 |
| Способ защиты от эксцентриситета ротора электрической машины переменного тока | 2017 |
|
RU2655718C1 |
| ИЗМЕРИТЕЛЬ ВЛАЖНОСТИ ЗЕРНА | 1992 |
|
RU2034288C1 |
| Способ диагностики повреждения короткозамкнутой обмотки ротора асинхронного двигателя | 2016 |
|
RU2644576C2 |


Изобретение относится к электротехнике и предназначено для измерения статического эксцентриситета ротора электрической машины. Технический результат - расширение функциональных возможностей и области применения, а также повышение чувствительности. Способ определения эксцентриситета ротора в электрической машине основан на измерении емкости относительно элементов ее конструкции и формировании сигнала о наличии эксцентриситета. При этом емкость измеряют относительно вала ротора в четырех точках, расположенных попарно на горизонтальной и вертикальной осях его симметрии, сравнивают каждую из них с эталонной емкостью и, если разность между измеренной и эталонной емкостями превысит установленную величину, формируют сигнал о наличии и направлении перемещения ротора. 4 ил.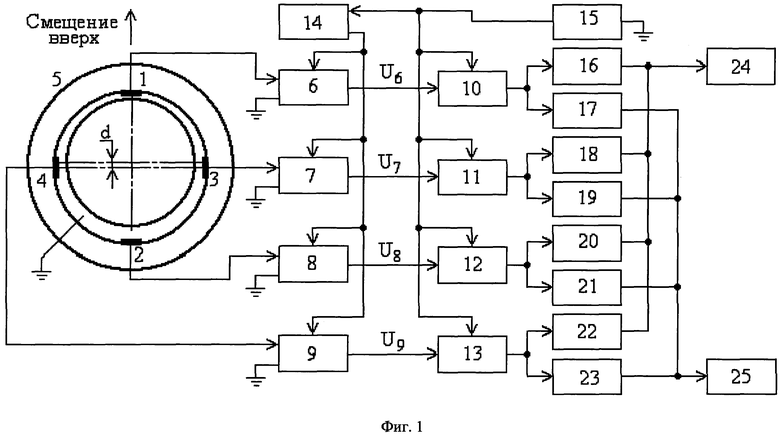
Способ определения эксцентриситета ротора в электрической машине, основанный на измерении емкости относительно элементов ее конструкции и формировании сигнала о наличии эксцентриситета, отличающийся тем, что емкости измеряют относительно вала ротора в четырех точках, расположенных попарно на горизонтальной и вертикальной осях его симметрии, сравнивают каждую из них с эталонной емкостью и, если разность между измеренной и эталонной емкостями превысит установленную величину, формируют сигнал о наличии и направлении перемещения ротора.
| Способ измерения динамического эксцентриситета электрической машины | 1985 |
|
SU1332466A1 |
| Способ производства спичек и машина для осуществления его | 1926 |
|
SU25896A1 |
| Способ косвенного контроля динамического эксцентриситета асинхронной электрической машины | 1977 |
|
SU672708A1 |
| Способ контроля воздушного зазора торцевой электрической машины | 1987 |
|
SU1585872A1 |
| Устройство для контроля эксцентриситета ротора относительно статора | 1979 |
|
SU888288A1 |
| WO 1997021262 A1, 12.06.1997. | |||

