Изобретение относится к электрическим машинам, в частности к способам контроля рабочих характеристик электрических, машин и может быть использовано для косвенного контроля неравномерности воздушного зазора.
Цель изобретения - повышение точности измерения динамического эксцентриситета.
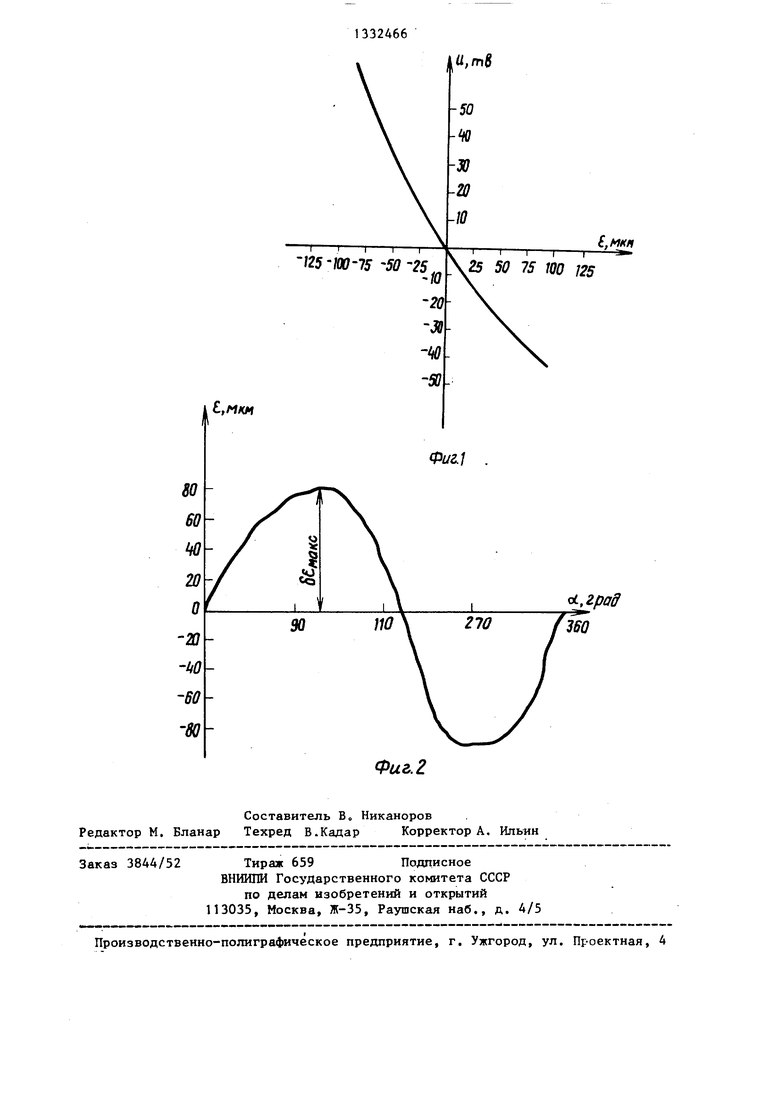
На фиг, 1 приведен тарировочный график зависимости величины воздушного зазора от продетектированного напряжения U при радиальном перемещении ротора; на фиг, 2 - график откло- 15 вой) линией отсчета динамического нения воздушного зазора за один оборот ротора (угол JL 0-360 относительно среднего значения),
Величина динамического эксцентриэксцентриситета, Частотно-модулированные колебания принимаются супергетеродинным приемником и для удобства отсчета динамического эксцентрисите- ситета А L относительно среднего зна- 20 та стрелку измерительного прибора
О) равна подстройки частоты гетеродина устанавливают на нуль шкалы.
Детектированное значение статического изменения частоты высокочастотг гдебГ «а(.- абсолютное максимальное от-25 ного генератора по показаниям прибо- отклонение воздушного за- ра, при медленном вращении ротора,
соответствует отклонению воздушного зазора относительно среднего зазора. Максимальное продетектированное пачения воздушного зазора (
зора относительно среднего зазора,
В режиме работы электрической машины или.при вращении ротора внешним 30 пряжение (по модулю) соответствует приводом изменение воздушного зазора величине динамического эксцентриситета л 6 , определяемого по тарировоч- ному графику.
Измерение динамического эксцентри- 35
в зоне расположения емкостного датчика между поверхностями статора и ротора эквивалентно переменной электрической емкости конденсатора В качестве одной обкладки конденсатора ис- Тгользован изолированный цилиндрический электрод, расположенный в пазу статора на уровне коронок зубцов. Второй обкладкой конденсатора служит поверхность ротора.
При включении конденсатора (электрод - ротор) в контур высокочастотного генератора осуществляется часситбта осуществляют следуюш 1м образом. Регистрируют емкостным датчиком сигнал от зубцов и стержней невращающегося ротора, тарируют шкалу измерительного прибора радиальным пе- 40 ремещением невращаюшегося ротора, приводят ротор во вращение, измеряют детектированньм по средней частоте сигнал от зубцов и стержней вращающегося ротора, изменяют опорную частотная модуляция сигнала в режиме ра- 45 тоту гетеродина до нулевого значения боты двигателя от сети, а при медлен- детектированного сигнала, медленно
ном вращении ротора происходит статическое изменение частоты генератора. Статическое изменение частоты генератора осуществляют также радиальным rtepeмeщeниeм ротора в направлении неподвижного электрода. При этом сигнал регистрируют от зубцов и стержней ротора Продетектированные значения
частоты в динамическом и статическом 55 равномерности воздушного зазора и
режимах регистрируют прибором магнитоэлектрической системы со средней шкалой. Тарировку шкалы измер 1тельно- го прибора в единицах длины воздушного зазора производят с абсолютной погрешностью н- 5 мкм при радиальном перемещении неврашающегося ротора,
После тарировки измерение воздушного зазора производят по шкале прибора.
Детектированное значение частотно- модулированного сигнала при вращении ротора от сети ввиду инерционности
измерительного прибора магнитоэлектрической системы соответствует средней частоте модуляции, т„е, величине среднего отклонения воздушного зазора, которое является реперной (нулеИзмерение динамического эксцентри-
ситбта осуществляют следуюш 1м образом. Регистрируют емкостным датчиком сигнал от зубцов и стержней невращающегося ротора, тарируют шкалу измерительного прибора радиальным пе- ремещением невращаюшегося ротора, приводят ротор во вращение, измеряют детектированньм по средней частоте сигнал от зубцов и стержней вращающегося ротора, изменяют опорную часвращают ротор и измеряют динамический эксцентриситет по максимальному значению продетектированного по час- тоте сигнала.
Предлагаемый способ устраняет недостатки известных способов измерения динамического эксцентриситета, позволяет повысить точность контроля
динамического эксцентриситета электрической машины с зуб чатым ротором. Прим е-р. Проводят измерения неравномерности воздушного зазора и
1
динамического эксцентриситета в се-- рийном двигателе мощностью 0,8 кВ. Цилиндрический изолированный электрод (медный провод диаметром v 1 мм) расположен вдоль паза статора на уровне коронок зубцов. Вывод электрода подключен на вход высокочастотного генератора, передающего электромагнитные колебания к супергетеродину приемника с частотным детектором и регистрирующим прибором магнитоэлектрической системы с двухсторон ней щкалой. Тарировку воздушного зазора производят индикаторами перемещений с абсолютной погрешностью f 5 мкм, регистрирующими радиальное смещение вала ротора и, соответствен но, изменение воздушного зазора между статором и ротором (фиг. 1). Тарировку осуществляют радиальным перемещением ротора, находящегося в первоначальном положении и непосредственном контакте с изолированной поверхностью электрода.
После тарировки регистрирующего прибора по показаниям индикаторов перемещения двигатель подключают к сети и измеряют среднее (интегральное) значение продетектированного по средней частоте частотно-модулированного сигнала, что соответствует средней величине линии, воздушного зазора в месте расположения датчика. Для удобства отсчета неравномерности воздушного зазора измеряют частоту гетеродина до установки стрелки регистрирующего прибора на нулевое значение двухсторонней шкалы, измеряют среднее значение зазора, медленно вращают ротор и измеряют неравномерность воздушного зазора относительно среднего значения по показаниям регистрирующего прибора (фиг. 2). Максимальное U лq|;l e показание регистрирующего прибора соответствует величине динамического эксцентриситета.
Использование предлагаемого способа измерения динa п-Iчecкoгo эксцентриситета по сравнению с известными .способами обеспечивает высокую точность благодаря следующим преимуществам:
32Д66
применение емкостного датчика в отличие от индуктивных позволяет измерять неравномерность воздушного за- g зора, создаваемого всей поверхностью ротора (зубчатого и гладкого);
I
возможность тарировки шкалы регистрирующего прибора в единицах длины , воздушного зазора прямыми известными методами при невращающемся роторе;
высокая помехозащищенность, так как регистрация изменения емкости электрод-ротор производится на высо- кой частоте f 36 мГц и электромагнитные поля не оказывают влияния на величину полезного сигнала.
20
Формула изобретения
Способ измерения динамического эксцентриситета электрической машины путем измерения параметров сигнала датчика, размещаемого на статоре, детектирования этого сигнала, формирования из него контролируемого сигнала, пропорционального динамическо- hry эксцентриситету, отличающий с я тем, что, с целью повышения точности, получение контролируемого сигнала производят емкостным датчиком, расположенным вдоль паза электрической машины на уровне коронок зубпов и включенного в контур гетеродина, предварительно производят тарировку измерительного прибора путем радиального перемещения ротора относительно статора, отключенного от сети, и измерения амплитуды контpoJHipyeMoro сигнала, далее устанавливают ротор в рабочее положение, подключают статор к сети и измеряют среднее значение контролируемого сигнала, пропорциональное cpeднe ry зазору при вращающемся роторе, отключают двигатель от сети, изменяют опорную частоту гетеродина до получения нулевого значения контролируемого сигнала и при медленном провороте ротора относительно статора измеряют изменение амплитуды контролируемого сигнала от ранее установленного нулевого значения.
/25-W-75 -50-25 -Ю
-20 -Л -5
U,mS
25 50 15 WO 125
i,MKM
Фиг. .
.град
Фиг. г

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫЯВЛЕНИЯ ПОВЫШЕННОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2024 |
|
RU2823095C1 |
| Радиальная электромагнитная опора для активного магнитного подшипника | 2021 |
|
RU2763352C1 |
| УСТРОЙСТВО ДЛЯ ТАРИРОВКИ ДАТЧИКОВ ИМПУЛЬСНОГО ДАВЛЕНИЯ | 2004 |
|
RU2261421C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАДИАЛЬНО-ОСЕВЫХ ЗАЗОРОВ В ТУРБОМАШИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2280238C1 |
| ЭЛЕКТРОУСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2158692C2 |
| Способ косвенного контроля динамического эксцентриситета асинхронной электрической машины | 1977 |
|
SU672708A1 |
| СПОСОБ ВЫЯВЛЕНИЯ ОБОРВАННЫХ СТЕРЖНЕЙ В КОРОТКОЗАМКНУТОЙ ОБМОТКЕ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2018 |
|
RU2687881C1 |
| СЕРВОПРИВОД С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2162041C2 |
| Устройство для косвенного контроля неравномерности воздушного зазора электрической машины | 1985 |
|
SU1334048A1 |
Изобретение относится к способам контроля неравномерности воздушного зазора электрических машин при вращающемся и неподвижном роторе. Цель изобретения - повьштение точности. Для реализации способа сигнал от зубцов и стержней potopa регистрируют высокочастотным емкостным датчиком, расположенным вдоль паза статора на уровне коронок зубцов. Сигнал с датчика регистрируют измерителем частотной .модуляции. Шкалу измерительного прибора тарируют в единицах длины с помощью индикаторов перемещением невращающегося ротора. Способ обеспечивает высокую помехозащищенность, т.к. регистрация измерения емкости электрод-ротор производится на высокой частоте. 2 ил. S сл со 00 to k о: О5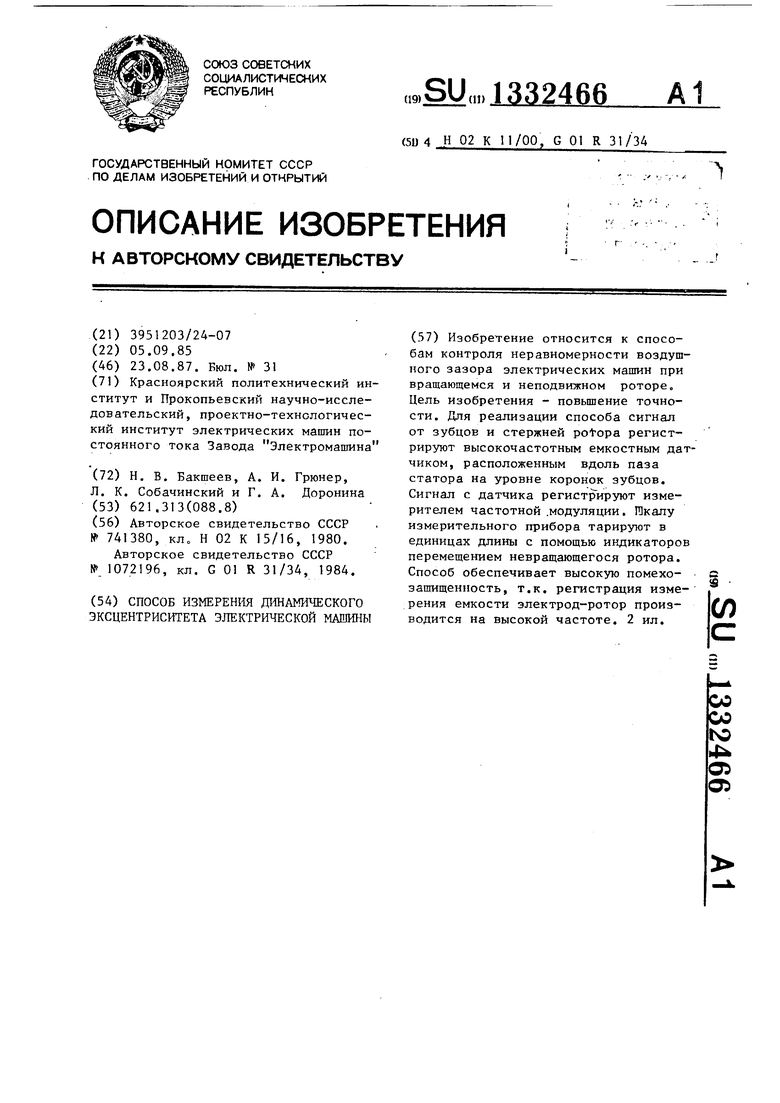
Составитель В, Никаноров Редактор М, Бланар Техред В.Кадар Корректор А, Ильин
Заказ 38А4/52
Тираж 659 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. А/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Способ косвенного контроля неравномерности воздушного зазора электрической машины | 1977 |
|
SU741380A1 |
| Способ косвенного контроля динамического эксцентриситета электрической машины | 1982 |
|
SU1072196A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
